
A Simulation Study of the Resiliency of Mobile Energy Storage Networks


Abstract
:1. Introduction
2. Model Description
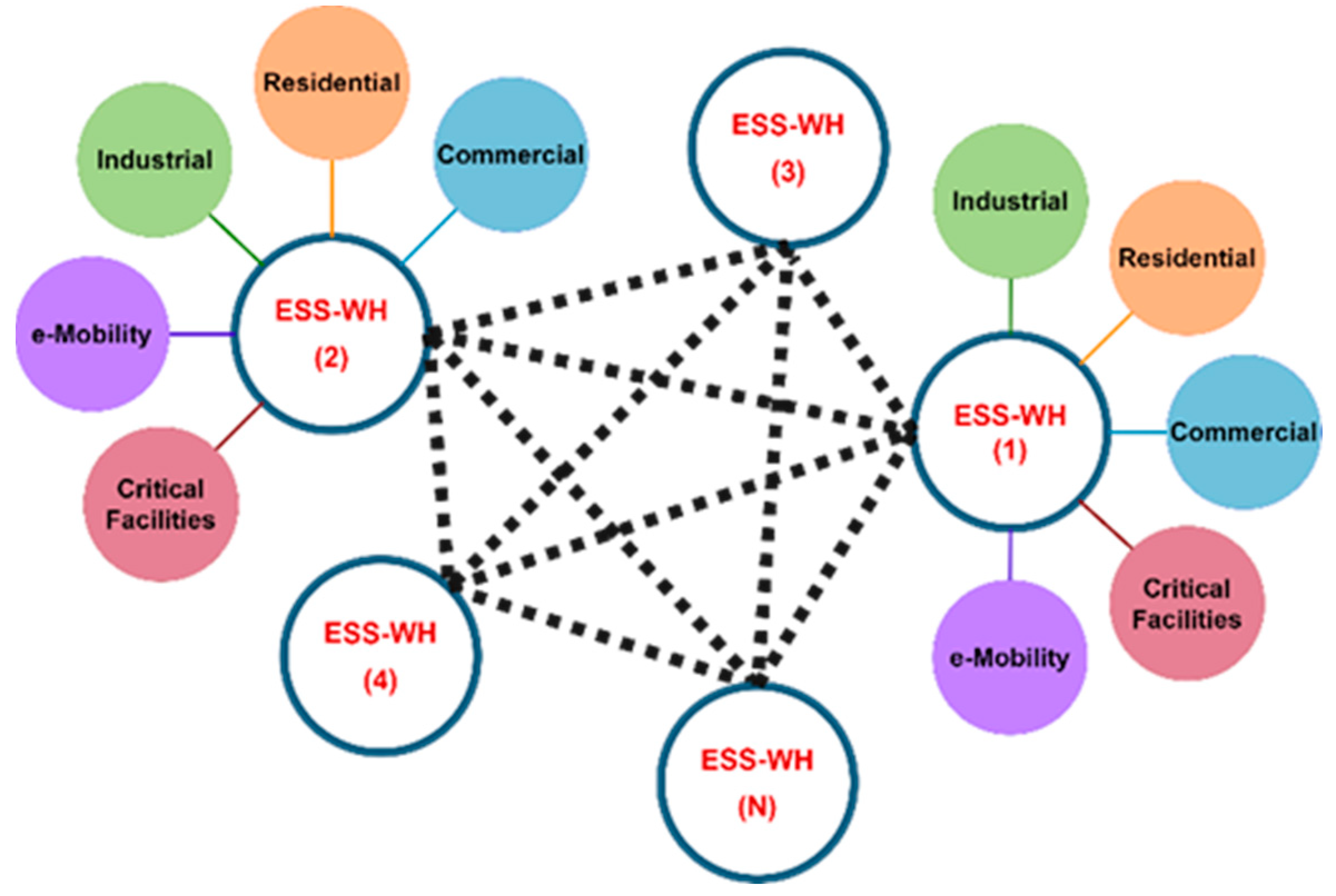
2.1. Off-Grid ESS Networks
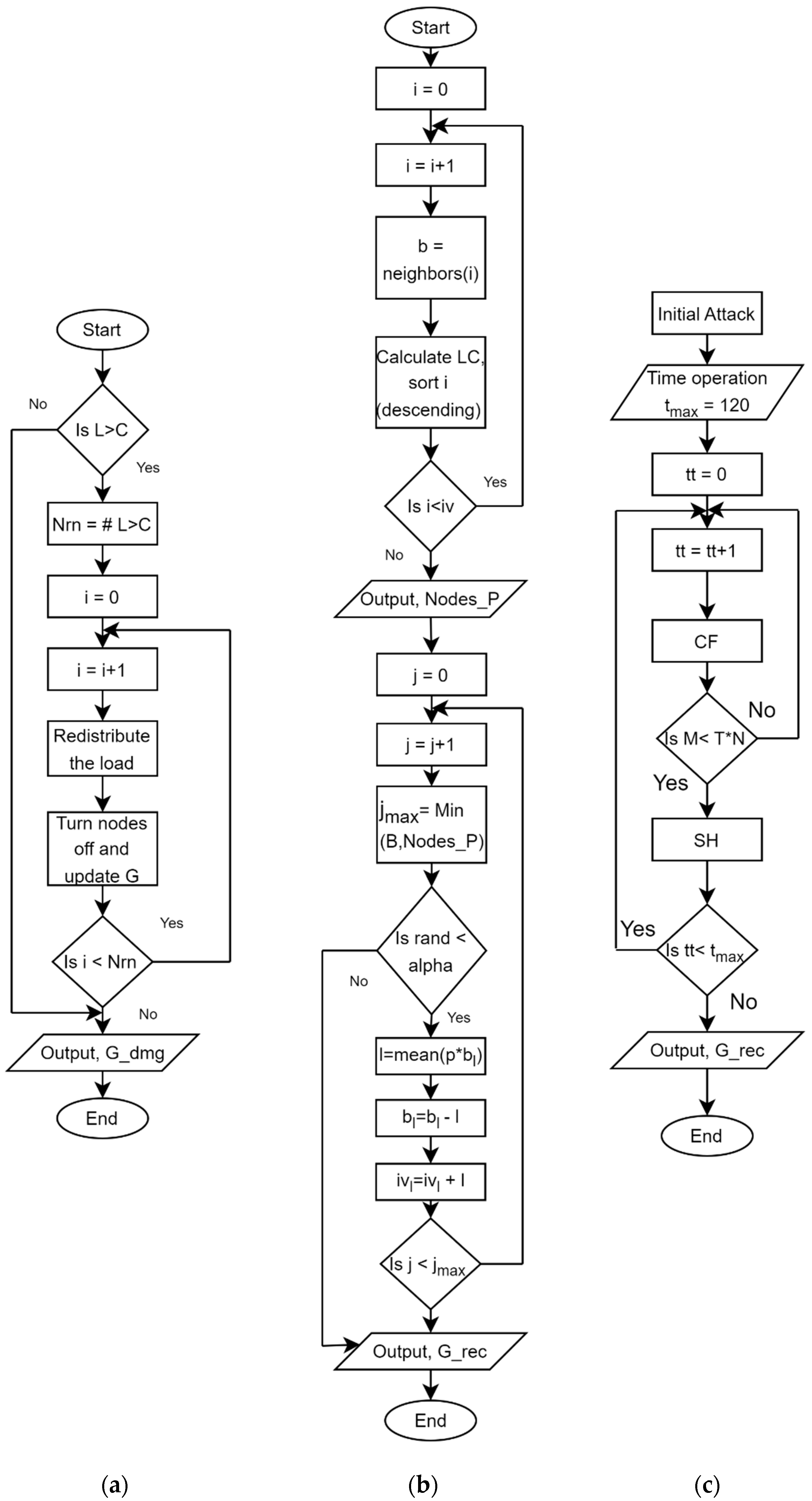
2.2. Simulation Framework
3. Results and Discussions
3.1. Road Network
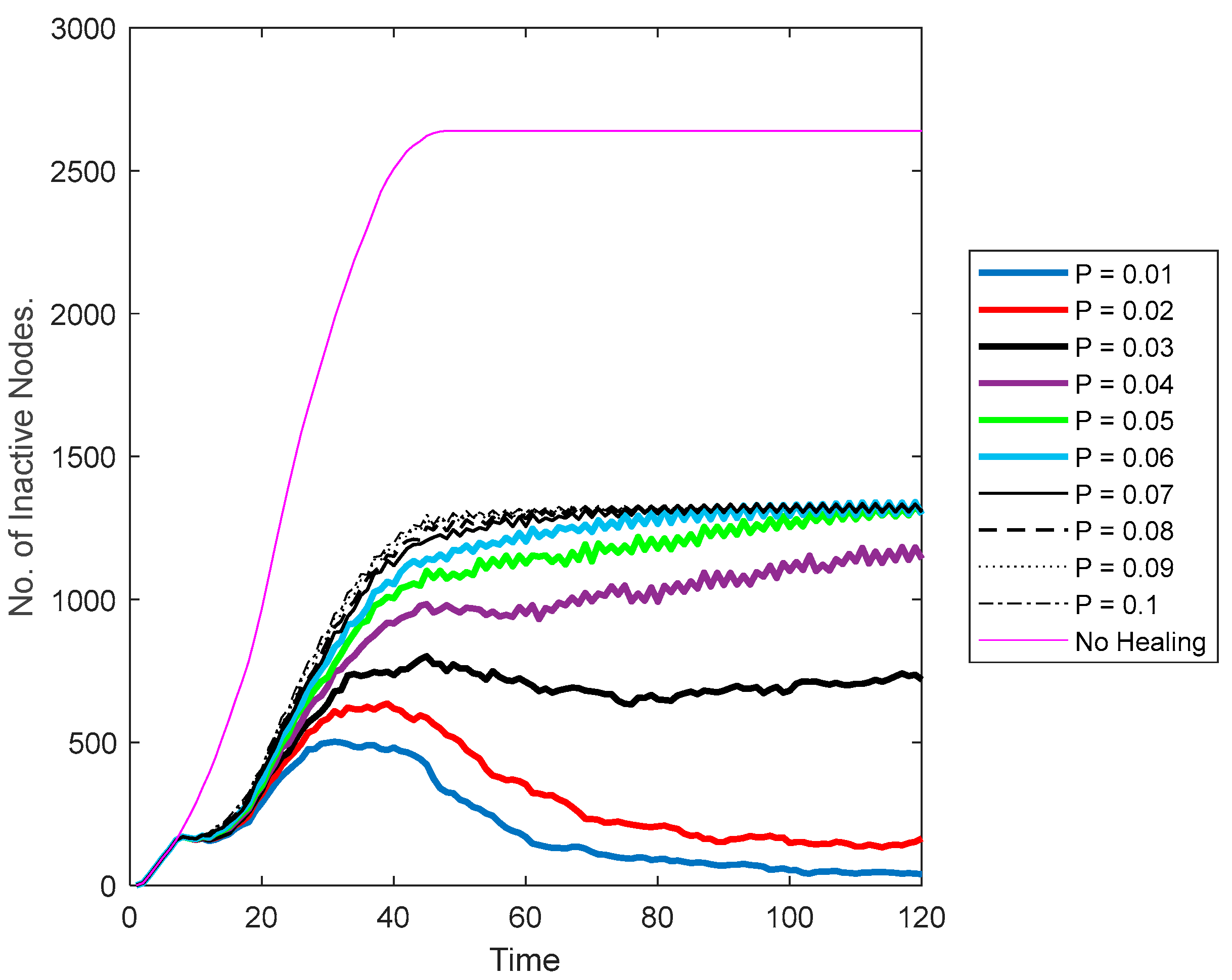
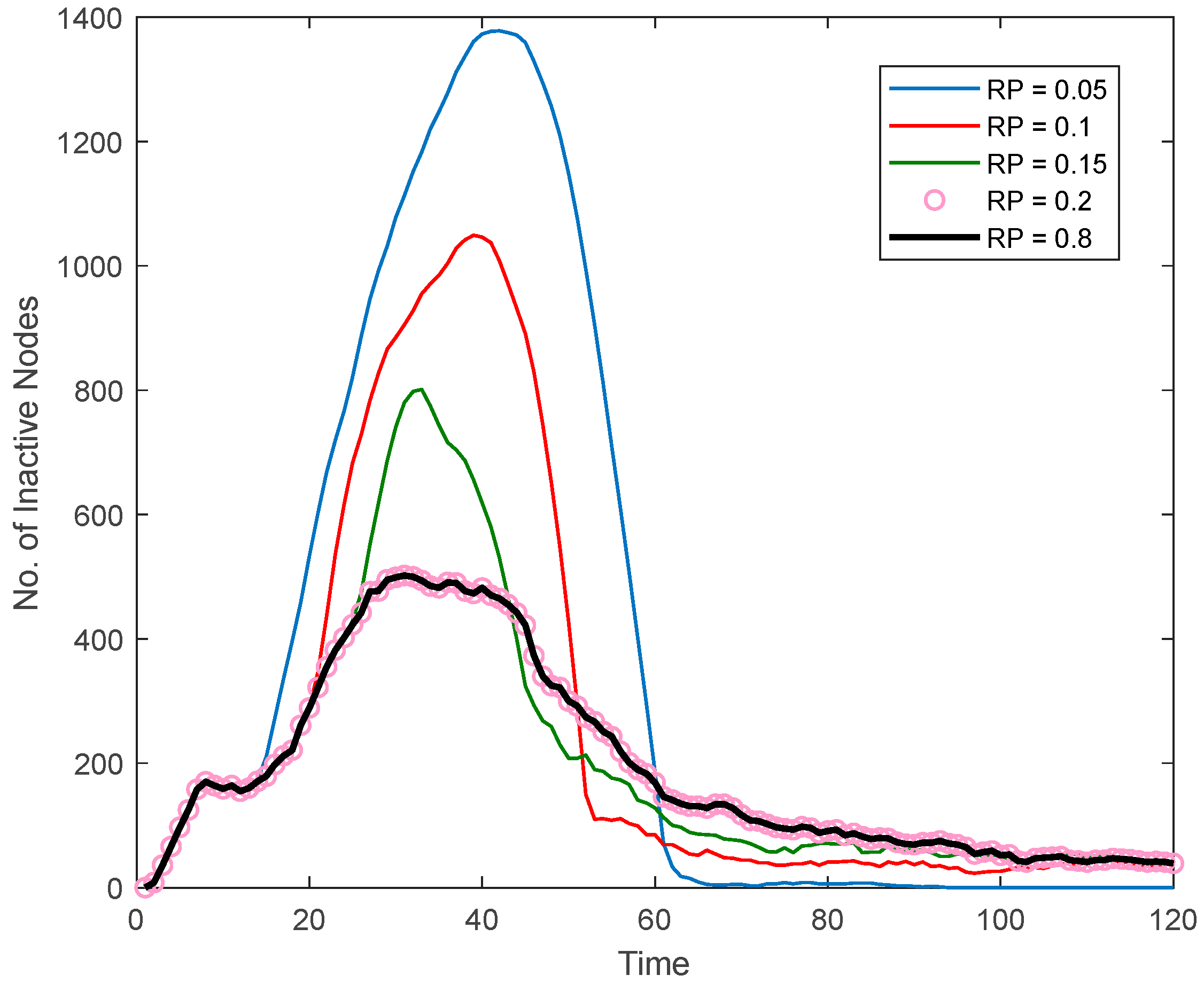
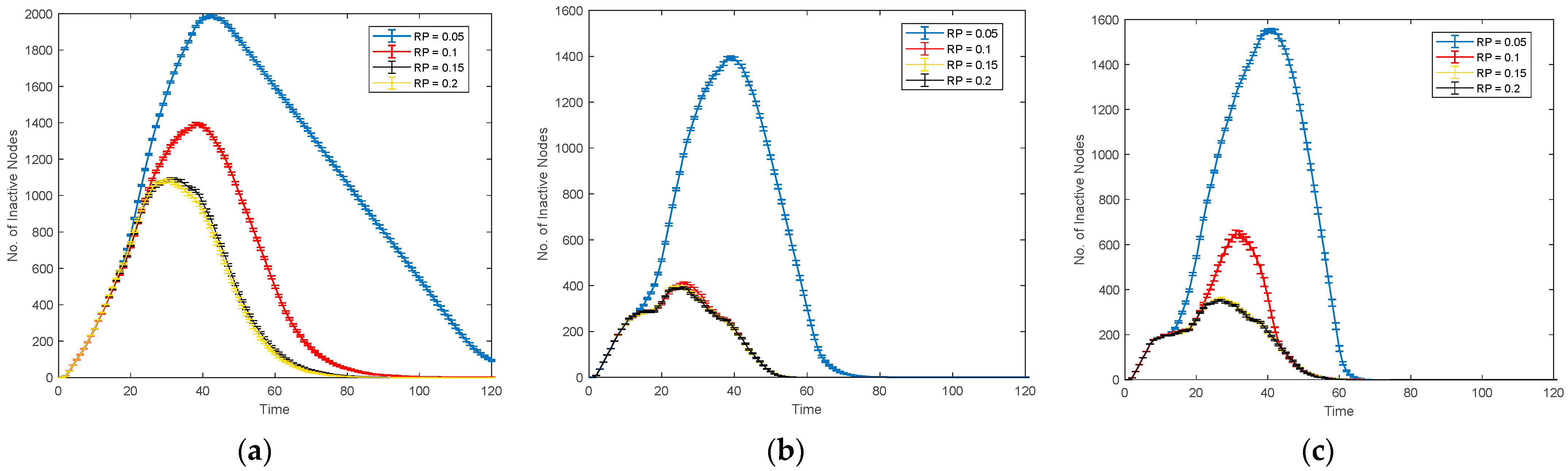
3.2. System Recovery Trajectories
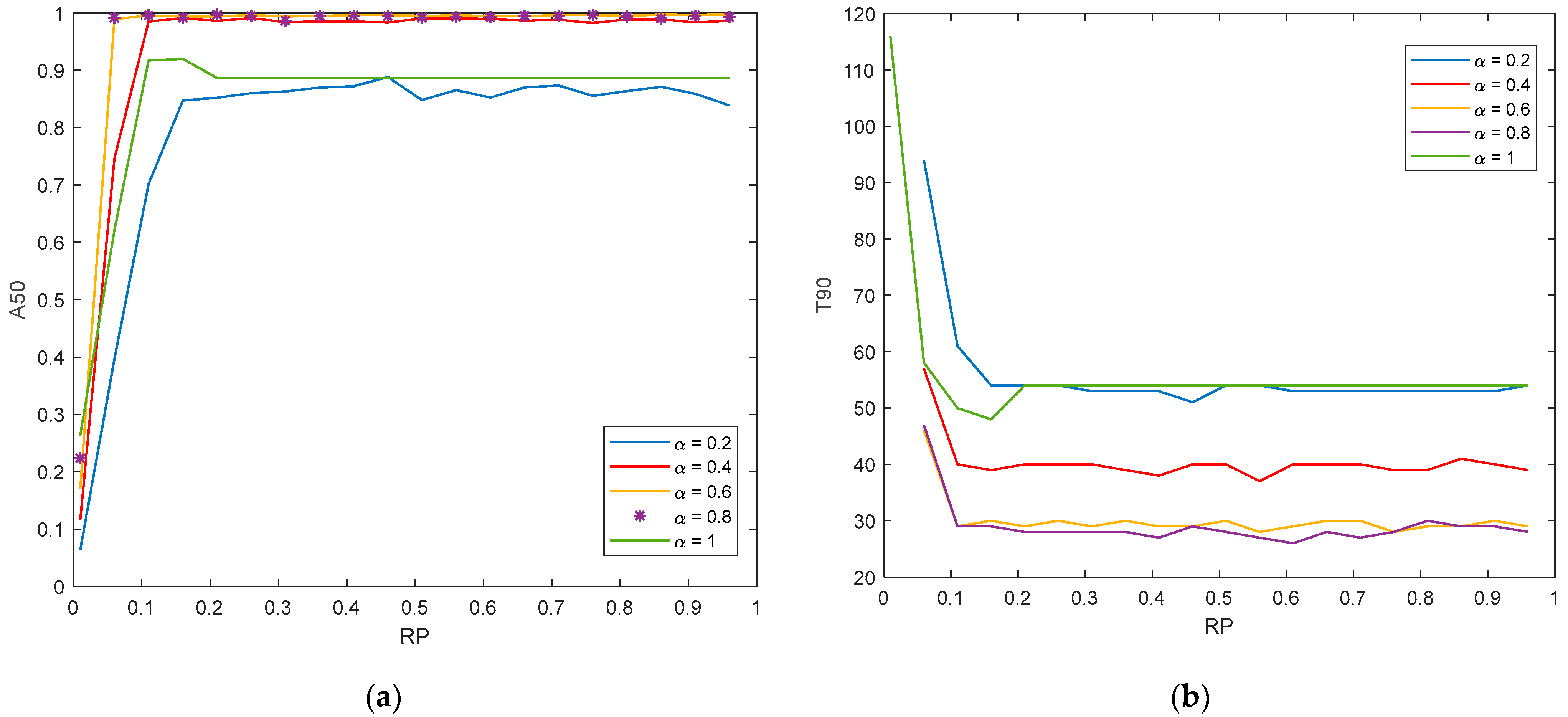
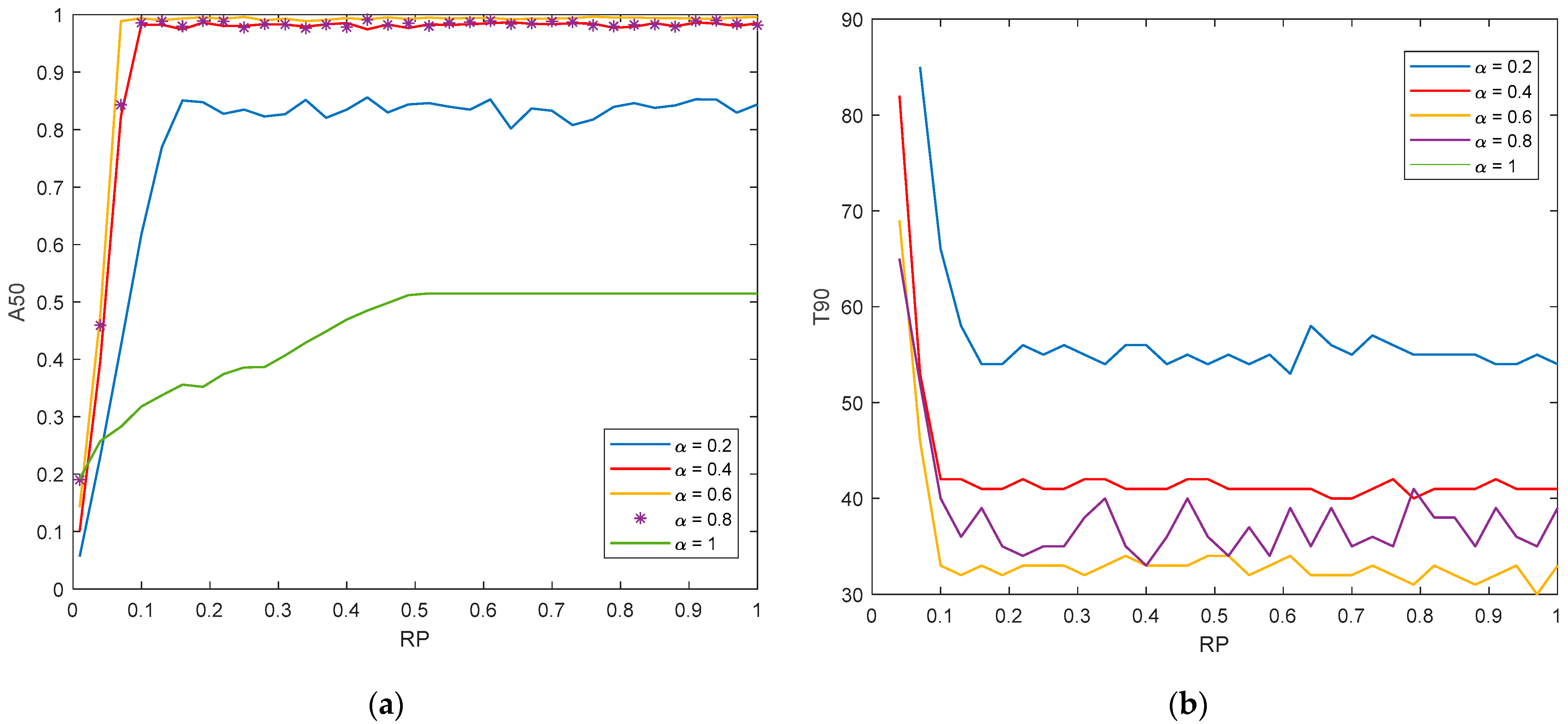
3.3. System Resilience Metrics
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- AL Shaqsi, A.Z.; Sopian, K.; Al-Hinai, A. Review of Energy Storage Services, Applications, Limitations, and Benefits. Energy Rep. 2020, 6, 288–306. [Google Scholar] [CrossRef]
- Nazemi, M.; Moeini-Aghtaie, M.; Fotuhi-Firuzabad, M.; Dehghanian, P. Energy Storage Planning for Enhanced Resilience of Power Distribution Networks Against Earthquakes. IEEE Trans. Sustain. Energy 2020, 11, 795–806. [Google Scholar] [CrossRef]
- McNamara, W.; Passell, H.; Montes, M.; Jeffers, R.; Gyuk, I. Seeking Energy Equity through Energy Storage. Electr. J. 2022, 35, 107063. [Google Scholar] [CrossRef]
- Liu, J.; Jian, L.; Wang, W.; Qiu, Z.; Zhang, J.; Dastbaz, P. The Role of Energy Storage Systems in Resilience Enhancement of Health Care Centers with Critical Loads. J. Energy Storage 2021, 33, 102086. [Google Scholar] [CrossRef]
- Parzen, M.; Neumann, F.; Van Der Weijde, A.H.; Friedrich, D.; Kiprakis, A. Beyond Cost Reduction: Improving the Value of Energy Storage in Electricity Systems. Carbon Neutrality 2022, 1, 26. [Google Scholar] [CrossRef]
- U.S. Energy Information Administration. Battery Storage in the United States: An Update on Market Trends (August 2021). Available online: https://www.eia.gov/analysis/studies/electricity/batterystorage/pdf/battery_storage_2021.pdf (accessed on 1 July 2022).
- U.S. Energy Information Administration. Annual Energy Outlook 2022, with Projections to 2050. Available online: https://www.eia.gov/outlooks/aeo/pdf/AEO2022_Narrative.pdf (accessed on 1 July 2022).
- Stephan, A.; Battke, B.; Beuse, M.D.; Clausdeinken, J.H.; Schmidt, T.S. Limiting the Public Cost of Stationary Battery Deployment by Combining Applications. Nat. Energy 2016, 1, 16079. [Google Scholar] [CrossRef]
- Dugan, J.; Mohagheghi, S.; Kroposki, B. Application of Mobile Energy Storage for Enhancing Power Grid Resilience: A Review. Energies 2021, 14, 6476. [Google Scholar] [CrossRef]
- Massachusetts Department of Energy Resources. Mobile Energy Storage Study: Emergency Response and Demand Reduction; Massachusetts Department of Energy Resources: Boston, MA, USA, 2020. [Google Scholar]
- Hayajneh, H.S.; Bashetty, S.; Salim, M.N.B.; Zhang, X. Techno-Economic Analysis of a Battery Energy Storage System with Combined Stationary and Mobile Applications. In Proceedings of the 2018 IEEE Conference on Technologies for Sustainability (SusTech), Beach, CA, USA, 11–13 November 2018; pp. 1–6. [Google Scholar]
- Hayajneh, H.S.; Zhang, X. Logistics Design for Mobile Battery Energy Storage Systems. Energies 2020, 13, 1157. [Google Scholar] [CrossRef] [Green Version]
- Hayajneh, H.S.; Lainfiesta, M.; Zhang, X. Three Birds One Stone: A Solution to Maximize Renewable Generation, Incentivize Battery Deployment, and Promote Green Transportation. In Proceedings of the 2020 IEEE Power Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 17–20 February 2020; pp. 1–5. [Google Scholar]
- Hayajneh, H.S.; Herrera, M.L.; Zhang, X. Design of Combined Stationary and Mobile Battery Energy Storage Systems. PLoS ONE 2021, 16, e0260547. [Google Scholar] [CrossRef]
- Mishra, S.; Anderson, K.; Miller, B.; Boyer, K.; Warren, A. Microgrid Resilience: A Holistic Approach for Assessing Threats, Identifying Vulnerabilities, and Designing Corresponding Mitigation Strategies. Appl. Energy 2020, 264, 114726. [Google Scholar] [CrossRef] [Green Version]
- Sullivan, J.E.; Kamensky, D. How Cyber-Attacks in Ukraine Show the Vulnerability of the U.S. Power Grid. Electr. J. 2017, 30, 30–35. [Google Scholar] [CrossRef]
- Ayeng’o, S.; Schirmer, T.; Kairies, K.-P.; Axelsen, H.; Sauer, D.U. Comparison of Off-Grid Power Supply Systems Using Lead-Acid and Lithium-Ion Batteries. Sol. Energy 2018, 162, 140. [Google Scholar] [CrossRef]
- Schäfer, B.; Witthaut, D.; Timme, M.; Latora, V. Dynamically induced cascading failures in power grids. Nat. Commun. 2018, 9, 1975. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sergiou, C.; Lestas, M.; Antoniou, P.; Liaskos, C.; Pitsillides, A. Complex Systems: A Communication Networks Perspective Towards 6G. IEEE Access 2020, 8, 89007–89030. [Google Scholar] [CrossRef]
- Li, Y.; Duan, D.; Hu, G.; Lu, Z. Discovering Hidden Group in Financial Transaction Network Using Hidden Markov Model and Genetic Algorithm. In Proceedings of the 2009 Sixth International Conference on Fuzzy Systems and Knowledge Discovery, Tianjin, China, 14–16 August 2009; Volume 5, pp. 253–258. [Google Scholar] [CrossRef]
- Wang, Y.-M.; Chen, B.; Chen, X.-S.; Gao, X.-E. Cascading Failure Model for Command and Control Networks Based on an m-Order Adjacency Matrix. Mob. Inf. Syst. 2018, 2018, e6404136. [Google Scholar] [CrossRef] [Green Version]
- Holme, P.; Kim, B.J. Vertex overload breakdown in evolving networks. Phys. Rev. E 2002, 65, 066109. [Google Scholar] [CrossRef] [Green Version]
- Carreras, B.; Lynch, V.; Dobson, I.; Newman, D.E. Critical points and transitions in an electric power transmission model for cascading failure blackouts. Chaos Interdiscip. J. Nonlinear Sci. 2002, 12, 985–994. [Google Scholar] [CrossRef]
- Zhang, Y.; Arenas, A.; Yağan, O. Cascading failures in interdependent systems under a flow redistribution model. Phys. Rev. E 2018, 97, 022307. [Google Scholar] [CrossRef] [Green Version]
- Stippinger, M.; Kertész, J. Enhancing resilience of interdependent networks by healing. Phys. A Stat. Mech. Appl. 2014, 416, 481–487. [Google Scholar] [CrossRef] [Green Version]
- Stippinger, M.; Kertész, J. Universality and scaling laws in the cascading failure model with healing. Phys. Rev. E 2018, 98, 042303. [Google Scholar] [CrossRef] [Green Version]
- Gallos, L.K.; Fefferman, N.H. Simple and efficient self-healing strategy for damaged complex networks. Phys. Rev. E 2015, 92, 052806. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Al Aqqad, W.; Zhang, X. Modeling command and control systems in wildfire management: Characterization of and design for resiliency. In Proceedings of the 2021 IEEE International Symposium on Technologies for Homeland Security (HST), Boston, MA, USA, 8–9 November 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Liu, C.; Li, D.; Fu, B.; Yang, S.; Wang, Y.; Lu, G. Modeling of self-healing against cascading overload failures in complex networks. Europhys. Lett. 2014, 107, 68003. [Google Scholar] [CrossRef]
- Pumpuni-Lenss, G.; Blackburn, T.; Garstenauer, A. Resilience in Complex Systems: An Agent-Based Approach. Syst. Eng. 2017, 20, 158–172. [Google Scholar] [CrossRef]
- Al-Aqqad, W.; Hayajneh, H.S.; Zhang, X. Dynamics and resiliency of networks with concurrent cascading failure and self-healing. PLoS ONE 2022, 17, e0277490. [Google Scholar] [CrossRef]
- Network Data Repository. Minnesota|Road Networks. Available online: https://networkrepository.com/road-minnesota.php (accessed on 9 June 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Explanation |
|---|---|
| G | graph network |
| N | total number of nodes |
| Labels | labels of all nodes |
| Loads | loads of all nodes |
| a | tolerance factor |
| C | capacities of all nodes |
| GO | graph object where labels, Loads, and C are fields in it |
| tmax | maximum simulation time |
| Mde | mode of attack |
| attack | number of initially attacked nodes |
| D | disturbance of additional load |
| G_dmg | damaged graph network |
| M | number of inactive nodes |
| Nrn | nodes that need to be removed |
| Nld | loads that need to be redistributed |
| LC | load-to-capacity ratio |
| Nodes_P | prioritized nodes |
| P | portion of the load of each active neighboring node |
| RP | recovery potential |
| α | certainty level |
| T | triggering level |
| G_rec | recovered graph network |
| iv | inactive nodes |
| b | active neighboring nodes of iv |
| bl | loads of active neighboring nodes |
| l | mean () |
| ratio | ratio of the active nodes to the total number of nodes |
| ESS-WHs | energy storage systems warehouses |
| MoBESSs | mobile battery energy storage systems |
| Module | Input Data | Model Parameter | Output To |
|---|---|---|---|
| 1 | G | Labels, Load, a, C | 2, 3, 4 |
| 2 | GO, tmax | Mde, attack, D | 3 |
| 3 | G_dmg, M, Nrn, Ndl, tmax | NA | 4 |
| 4 | G_dmg, Nodes_P, tmax | LC, P, RP, α | 3, 5 |
| 5 | 1, 2, 3, 4 | T, tmax | NA |
| 6 | M, N | ratio | NA |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Aqqad, W.; Hayajneh, H.; Zhang, X. A Simulation Study of the Resiliency of Mobile Energy Storage Networks. Processes 2023, 11, 762. https://doi.org/10.3390/pr11030762
Al-Aqqad W, Hayajneh H, Zhang X. A Simulation Study of the Resiliency of Mobile Energy Storage Networks. Processes. 2023; 11(3):762. https://doi.org/10.3390/pr11030762
Chicago/Turabian StyleAl-Aqqad, Waseem, Hassan Hayajneh, and Xuewei Zhang. 2023. "A Simulation Study of the Resiliency of Mobile Energy Storage Networks" Processes 11, no. 3: 762. https://doi.org/10.3390/pr11030762