
CFD Modelling and Numerical Simulation of the Windage Characteristics of a High-Speed Gearbox Based on Negative Pressure Regulation
Abstract
:1. Introduction
2. Simulation and Computational Models
2.1. Turbulence Model
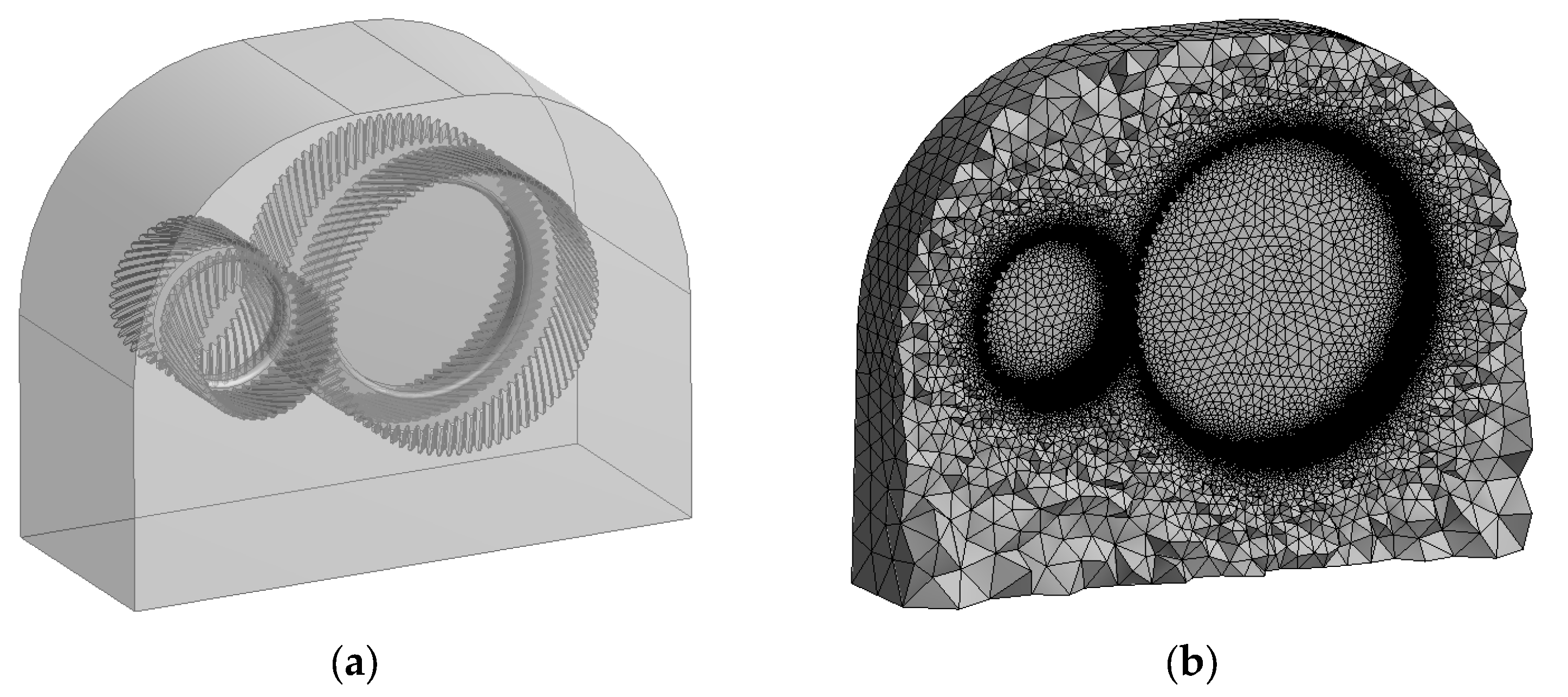
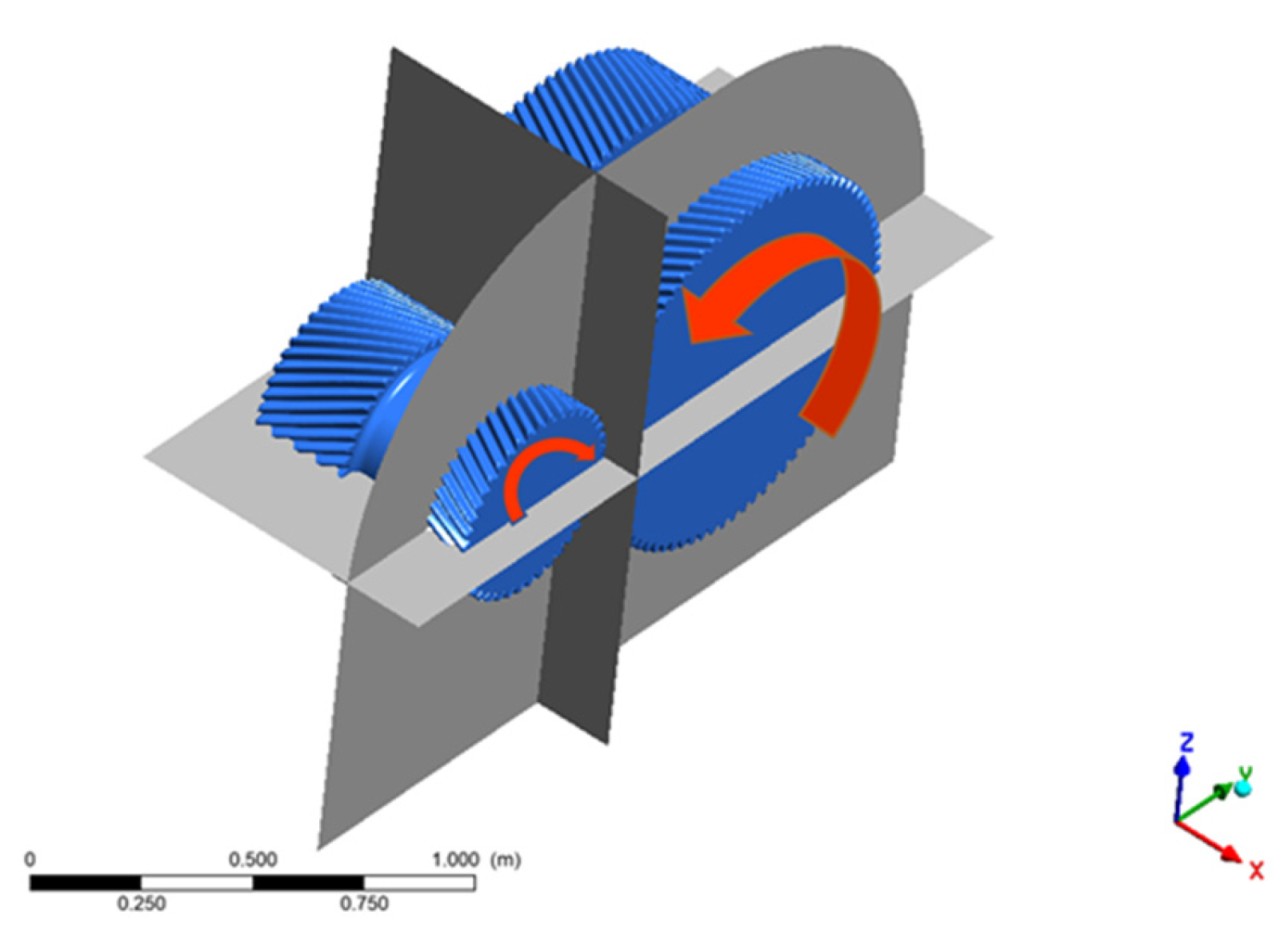
2.2. The CFD Model and the Simulation Settings
2.3. Windage Moment and Windage Power Loss
2.4. Windage Power Loss Prediction
3. Results and Analysis
3.1. Flow Field Characteristics and Windage Power Loss under Negative Pressure
3.2. Effect of Different Parameters on Windage Power Loss
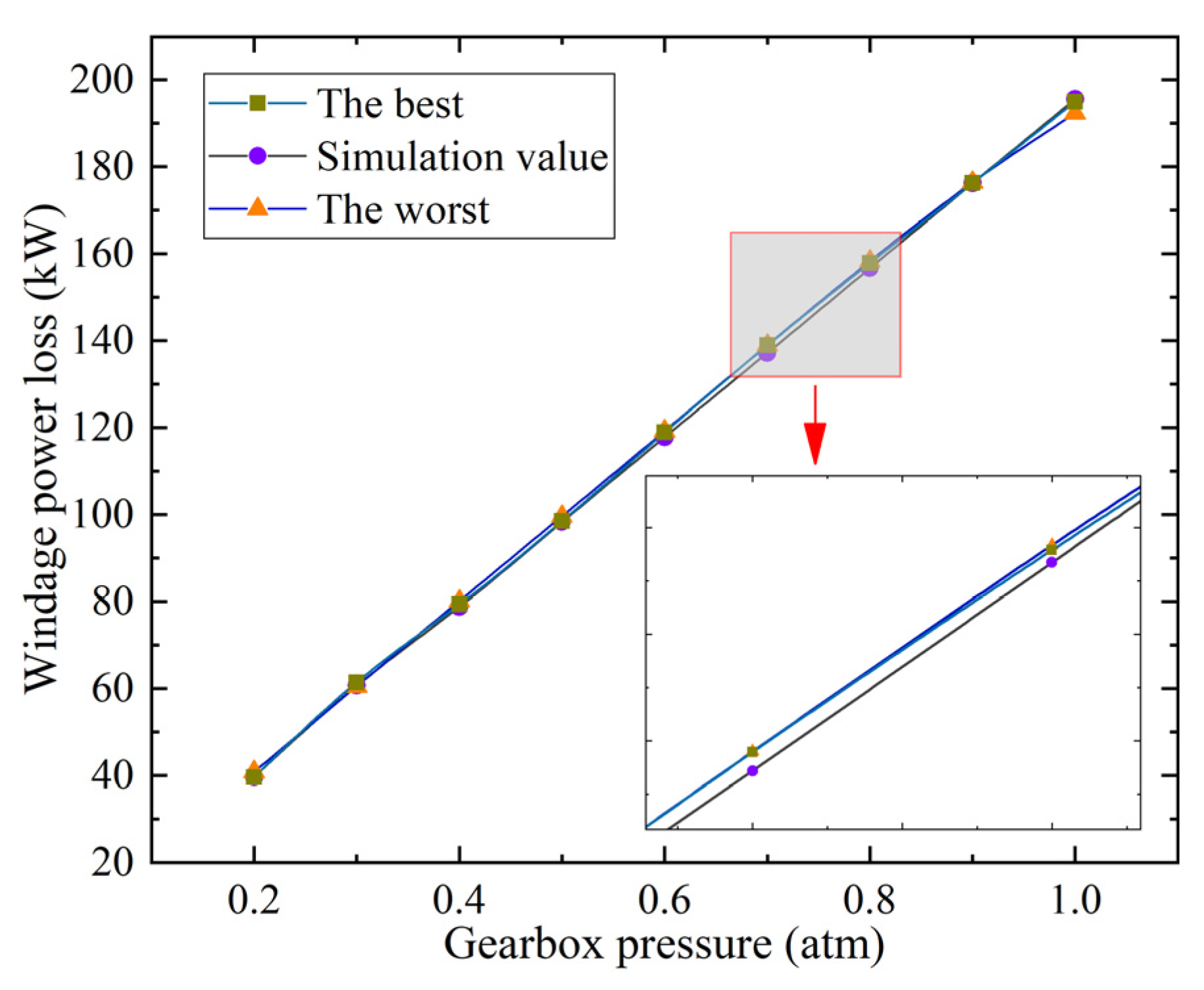
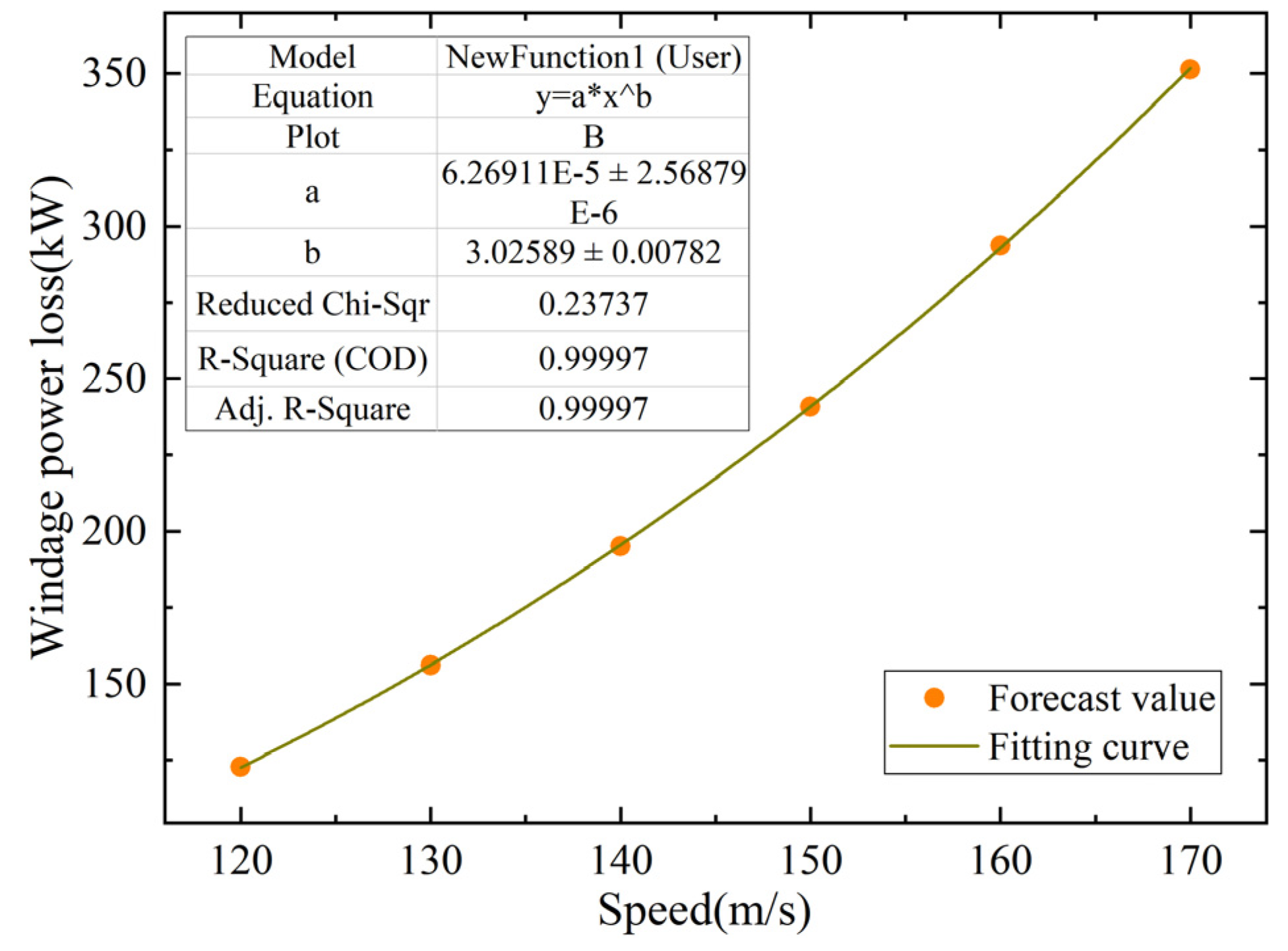
3.3. Windage Power Loss Prediction
4. Conclusions
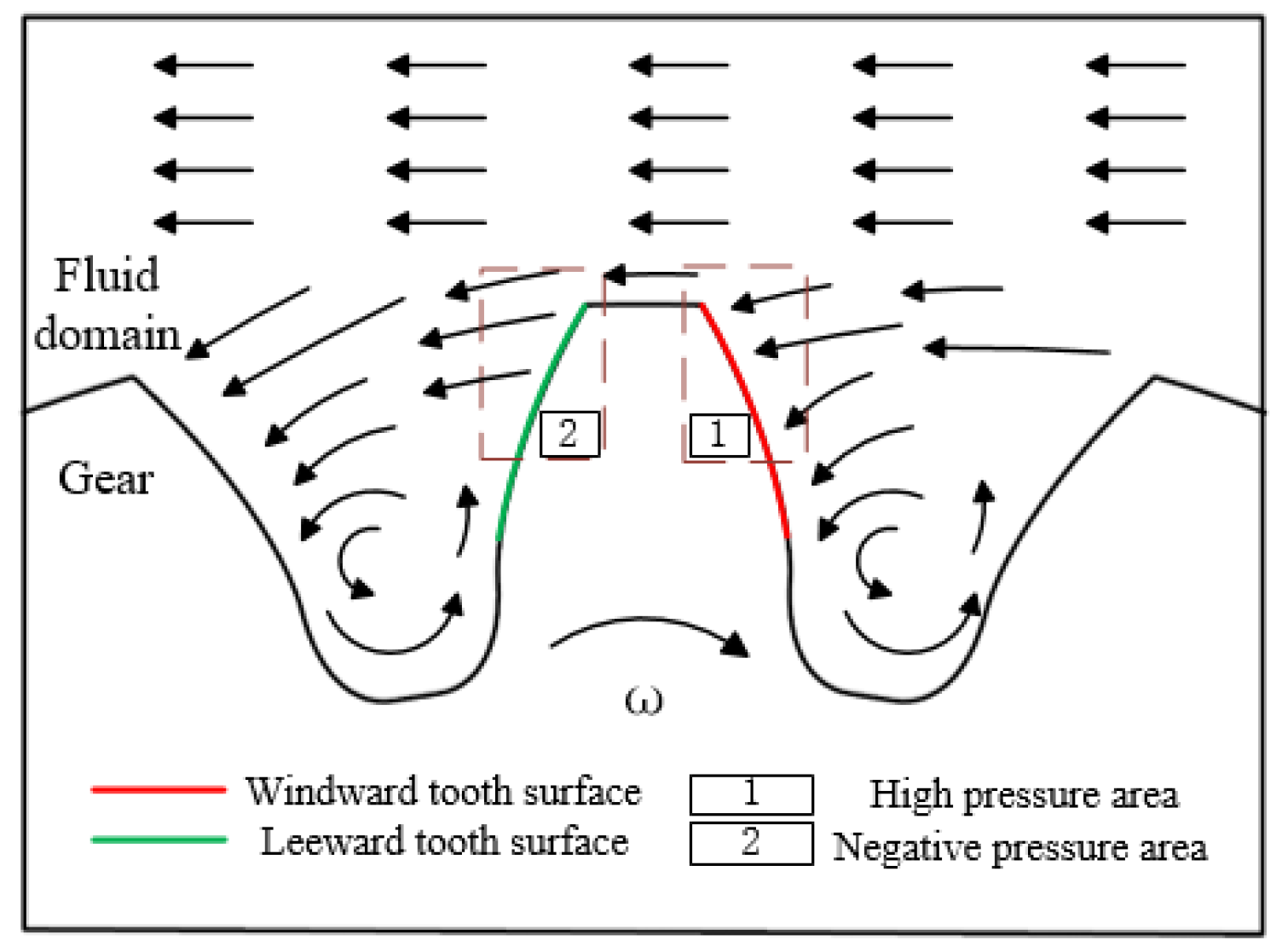
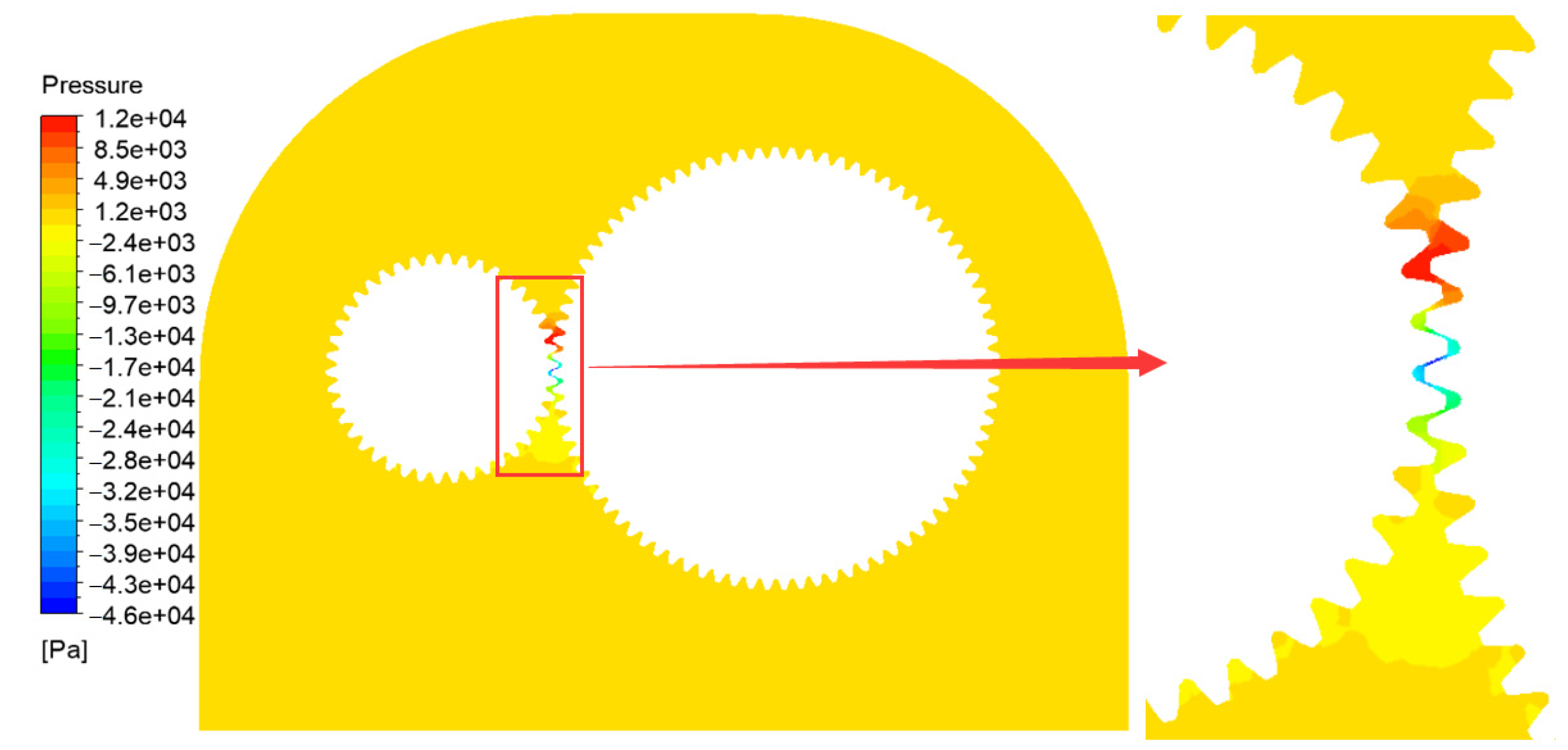
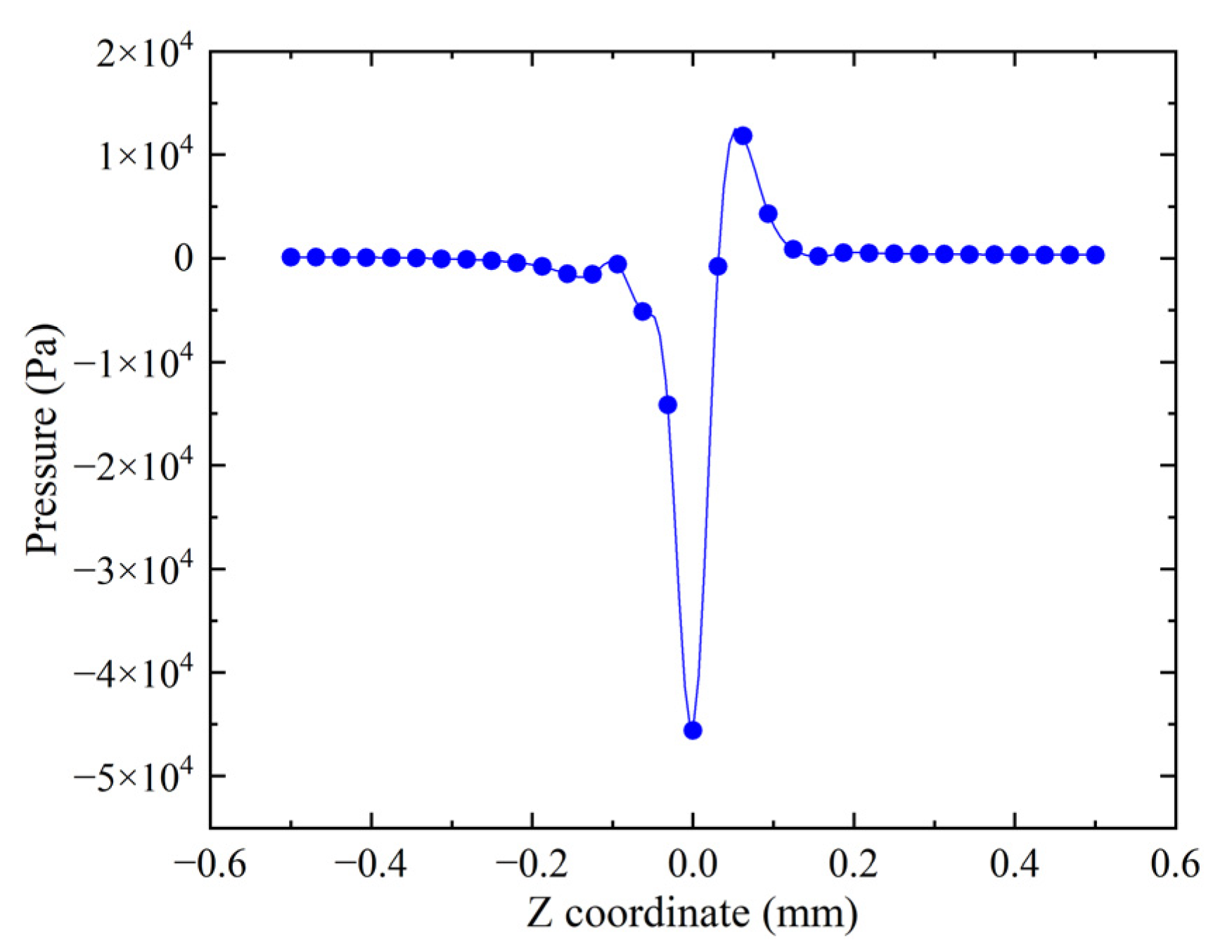
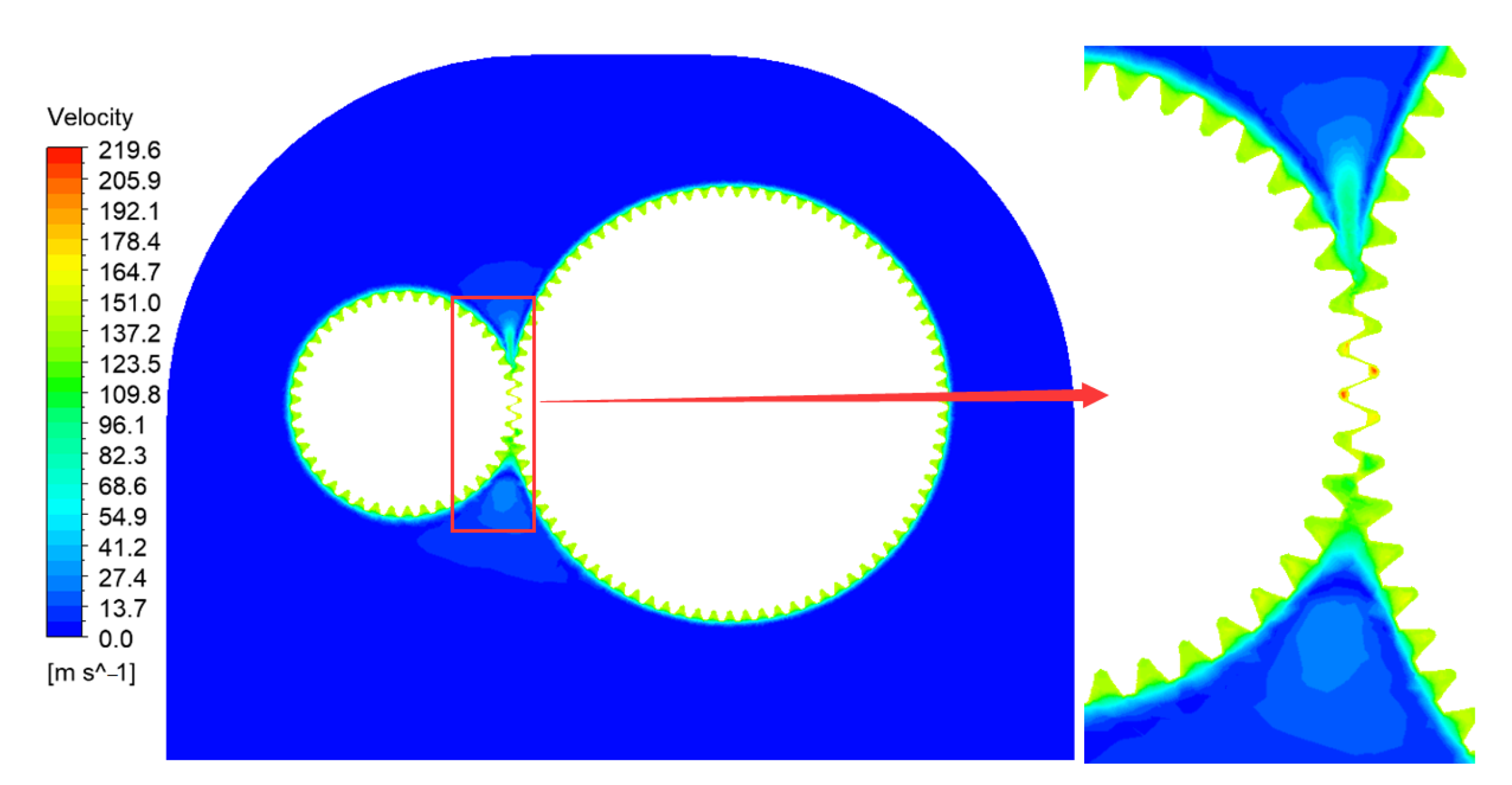
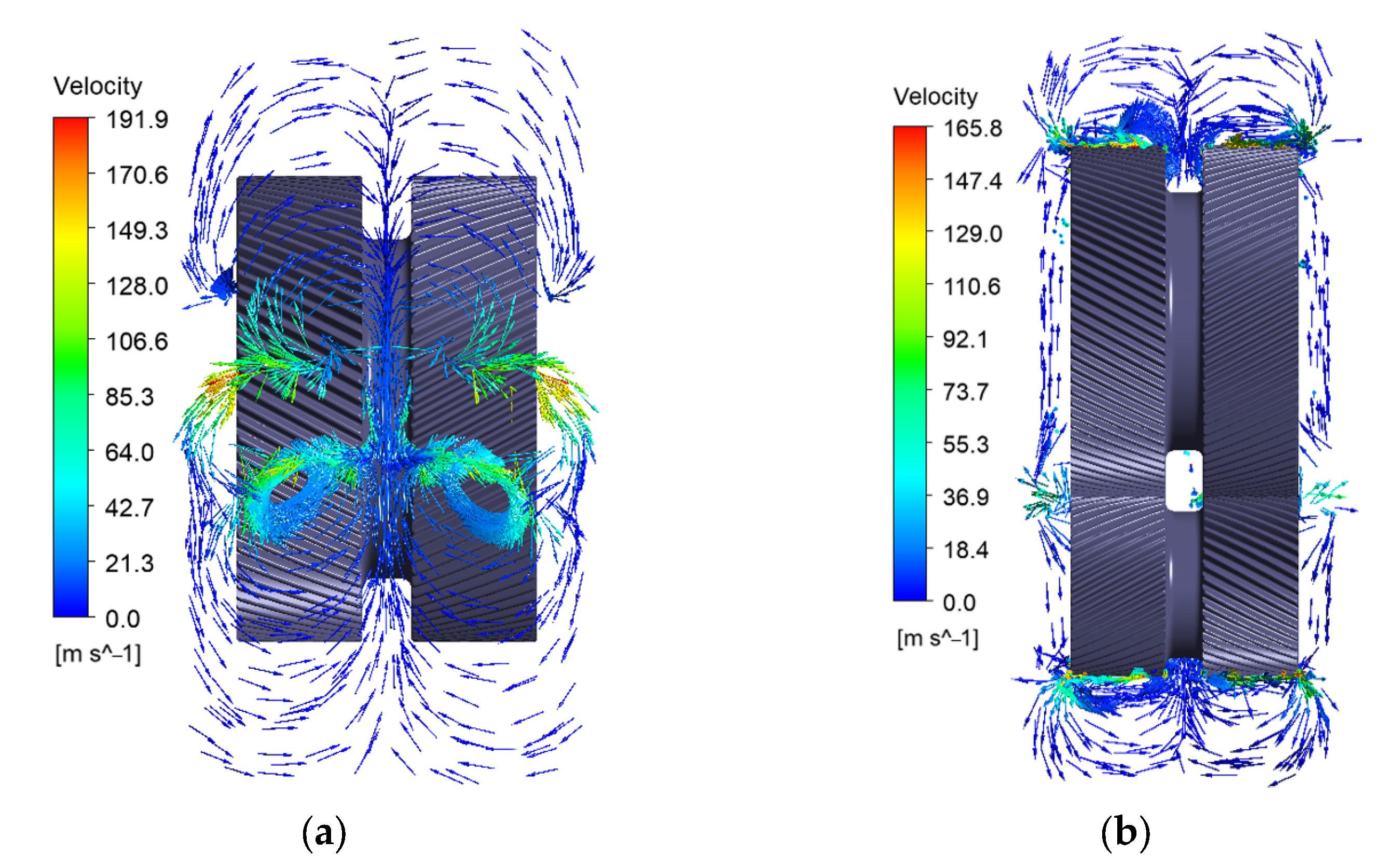
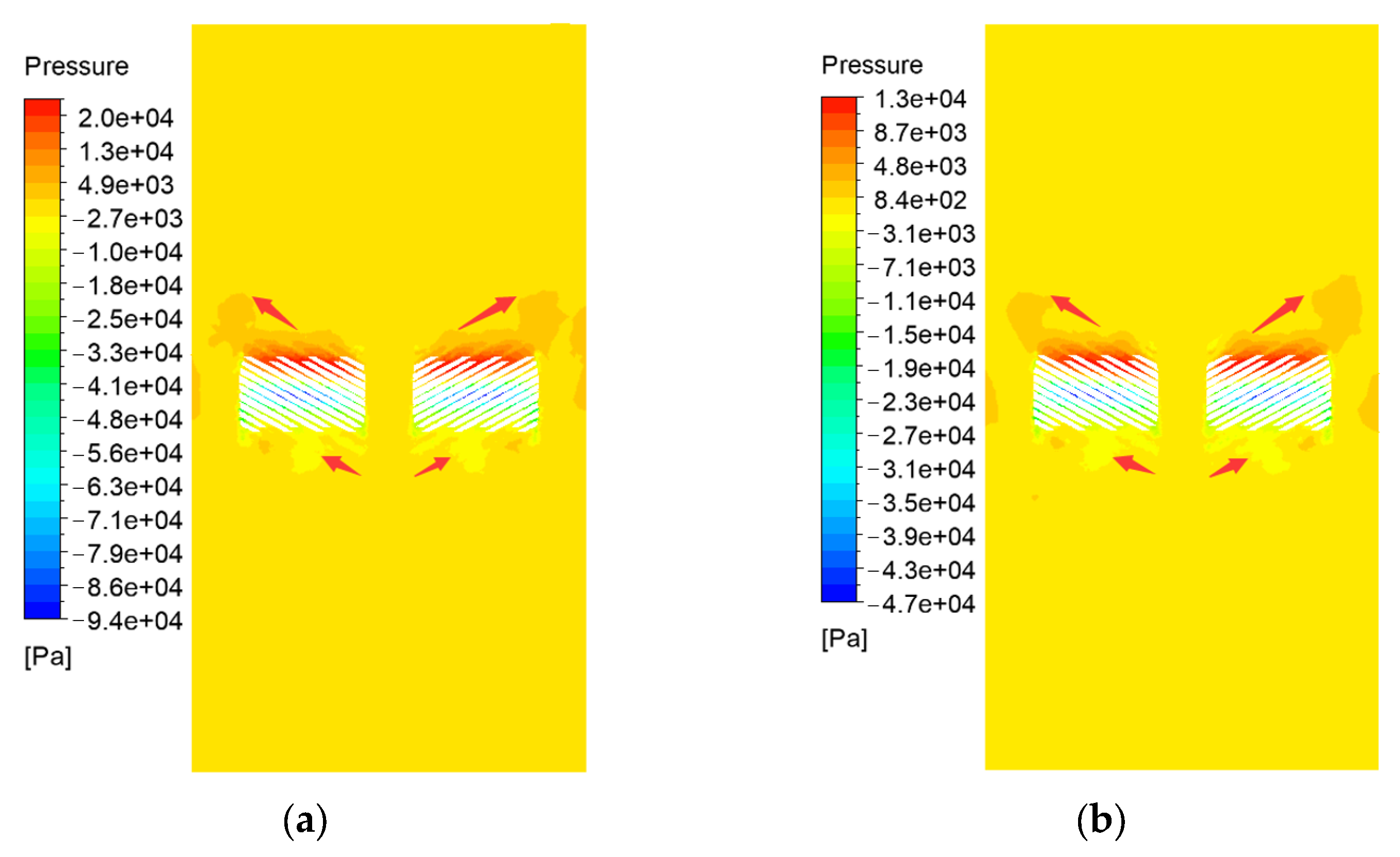
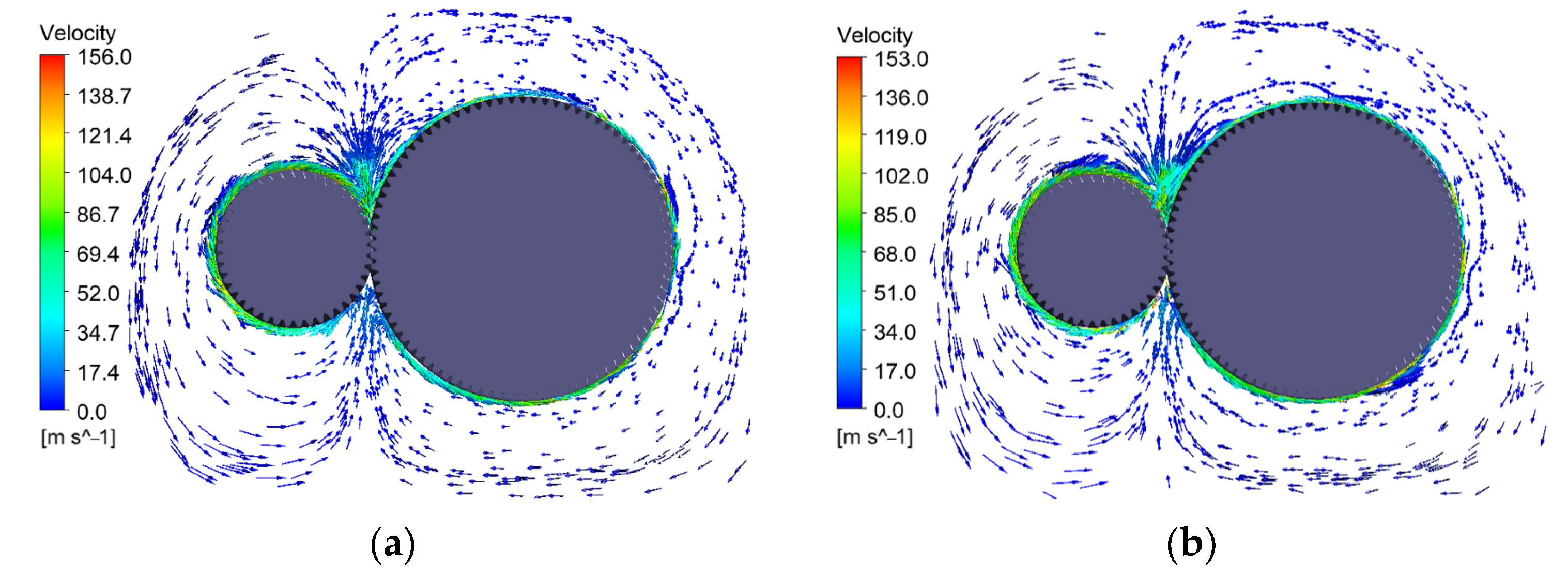
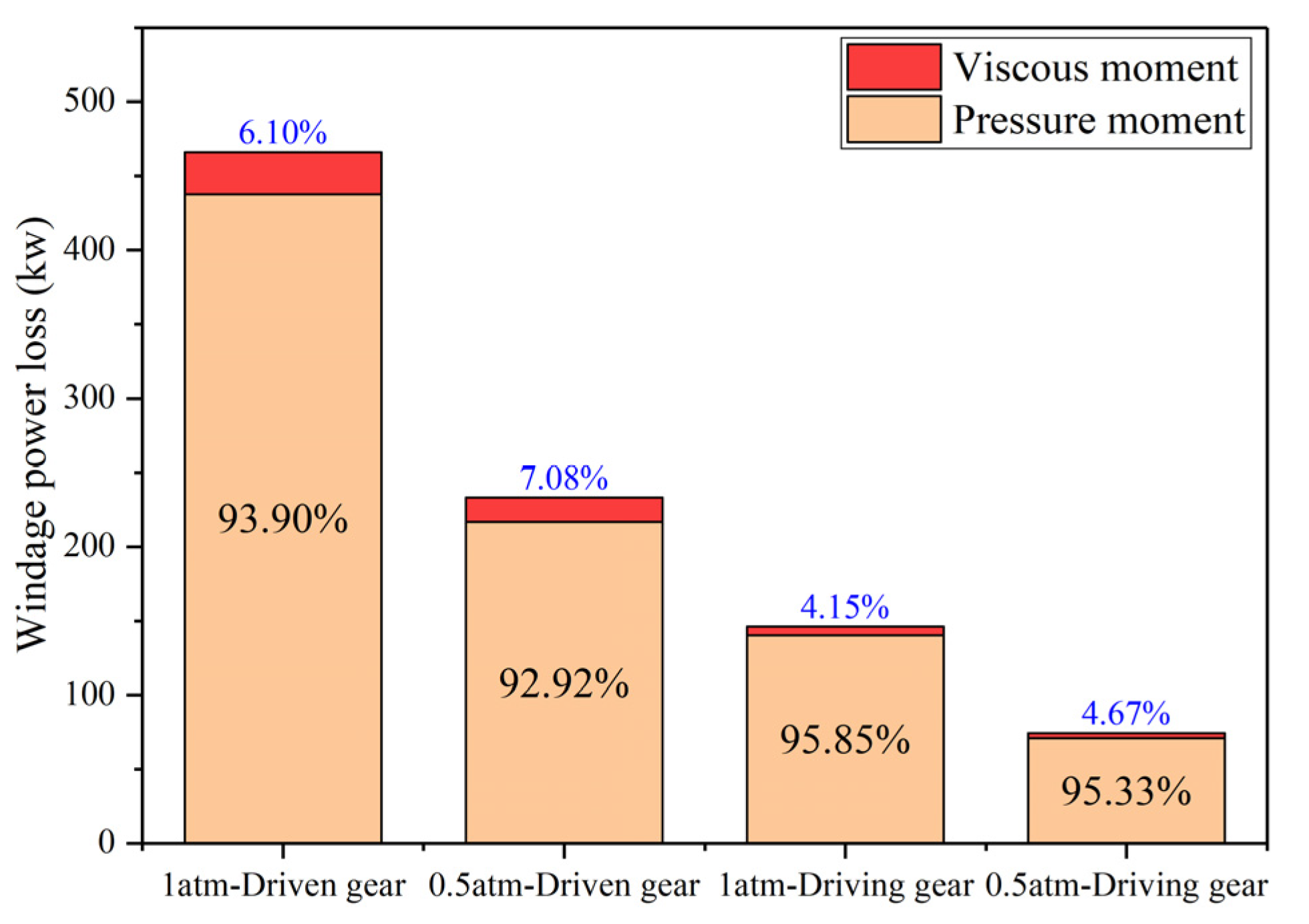
- The airflow in the meshing area of the gearbox is violent, which easily generates vortices. The air flowing at high speeds near the tooth surface produces a large pressure moment, which is the main reason for the windage loss. Under negative pressures, the airflow direction near the gear tooth surface is opposite to that observed far away from the tooth surface, which provides strong evidence for the generation of vortices in the gearbox.
- The flow field characteristics of the high-speed gearbox at 0.5 atm are basically the same as those at ordinary pressures, but the windage moment at 0.5 atm is reduced by 49.8% and the windage loss is reduced by 49.7% compared with the values obtained at ordinary pressures.
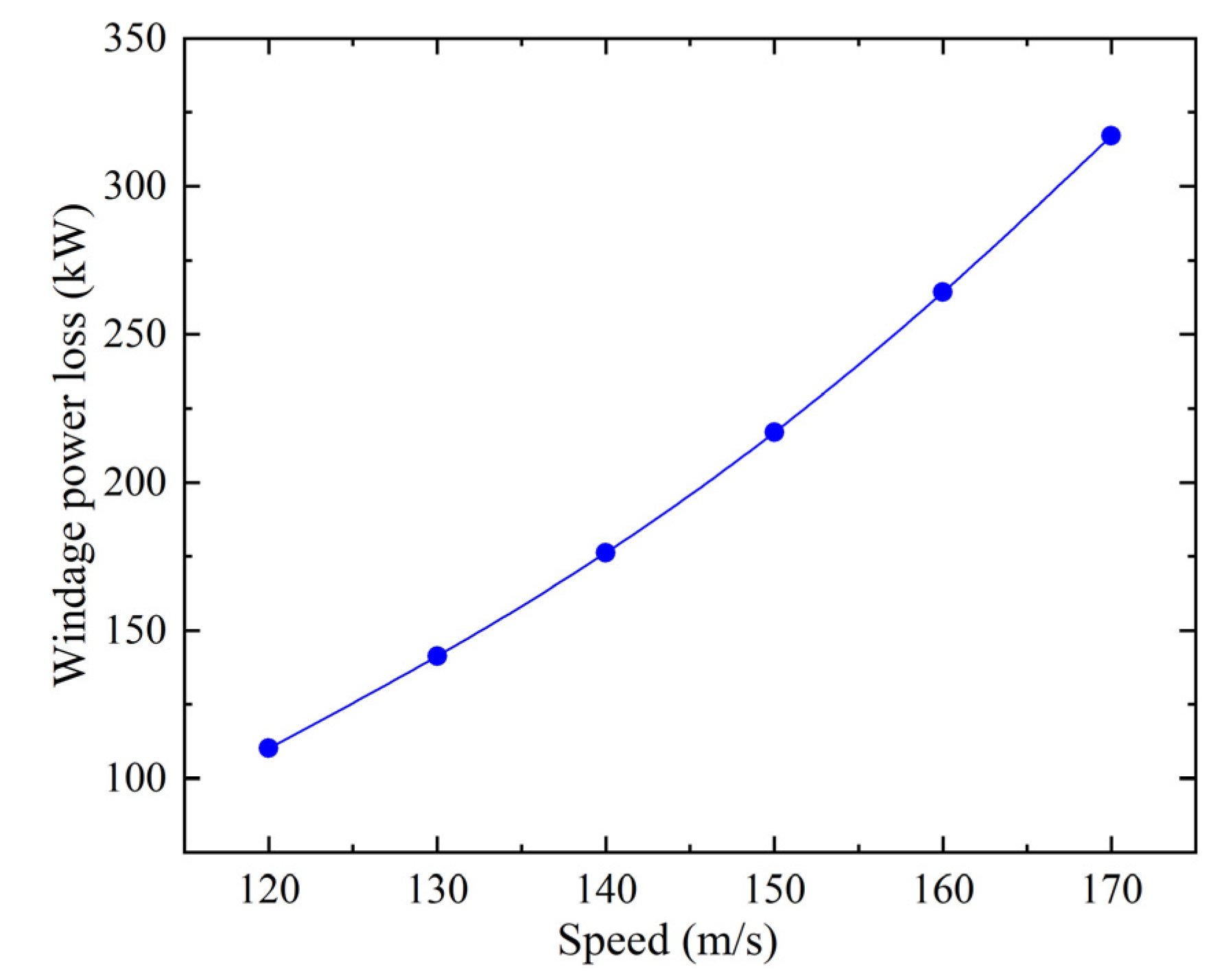
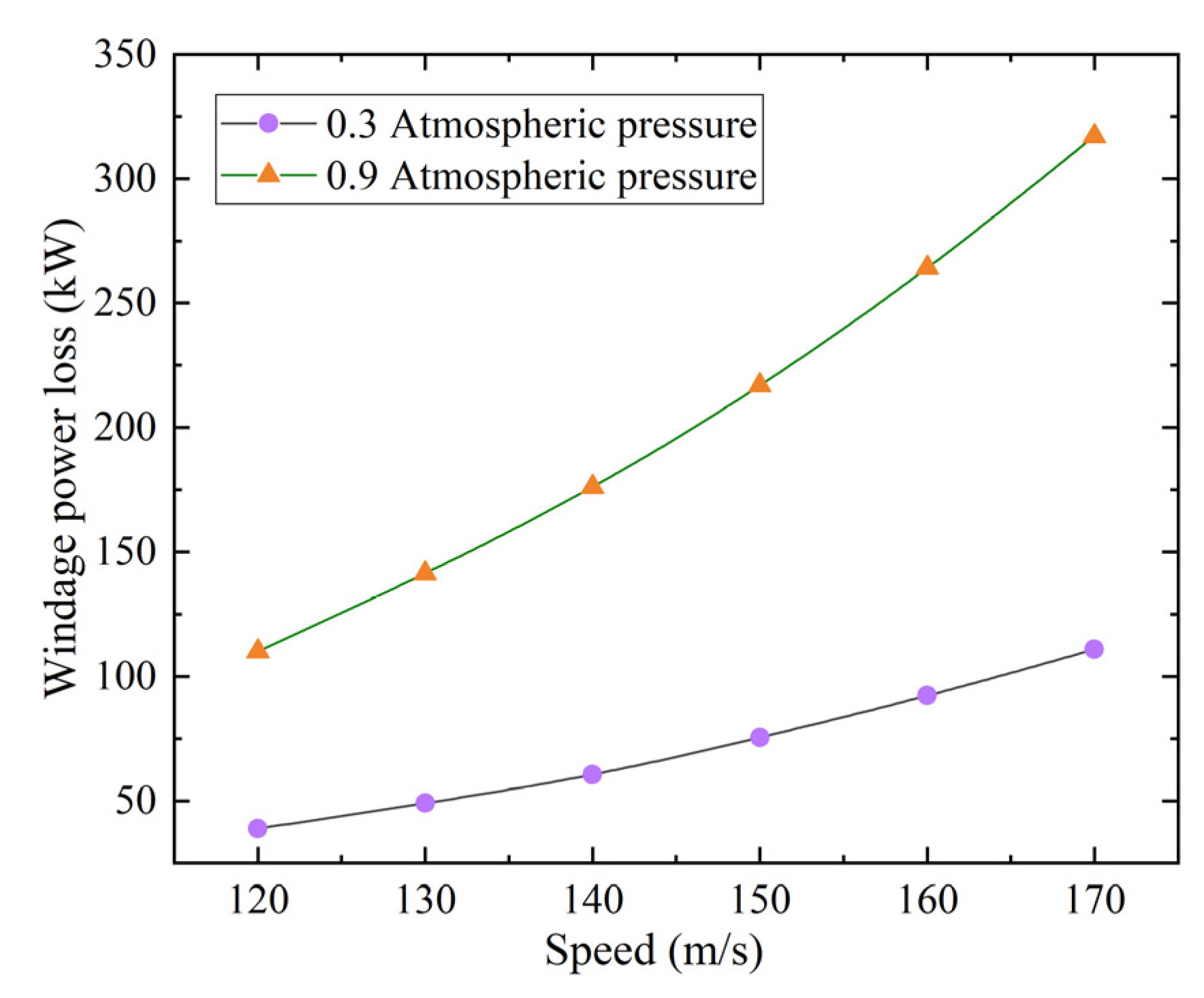
- The windage power loss increases linearly with the increase in gearbox pressure and exponentially with the increase in speed. Therefore, the windage power loss is minimum at lower gearbox pressures and gear speeds.
- The prediction results of the BP neural network optimization algorithm based on the genetic algorithm are in good agreement with the finite element simulation data and the open literature, showing that it has high prediction accuracy and can effectively save simulation analysis time.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| ρ | fluid density, kg/m3 |
| V | velocity vector |
| p | pressure, Pa |
| f | external force acting on unit volume fluid |
| μ | dynamic viscosity, Pa·s |
| Re | Reynolds number |
| v | average fluid velocity, m/s |
| d | pipe diameter |
| τij | Reynolds stress equivalent |
| u | mean velocity |
| μt | turbulence viscosity coefficients |
| σk | turbulent Prandtl numbers of k |
| σω | turbulent Prandtl numbers of ω. |
| m | modulus, mm |
| B | single tooth width, mm |
| α | pressure angle |
| n1 | number of driving gear teeth |
| n2 | number of driven gear teeth |
| v0 | rated linear speed of pitch circle, m/s |
| u0 | motion speed of the mesh node |
| γ | diffusion coefficient |
| R | air constant |
| T | thermodynamic temperature |
| TM | total windage moment, N·m |
| TV | viscous moment, N·m |
| TP | pressure moment, N·m |
| T0 | moment, N·m |
| P | power, kW |
| n | gear rotational speed, rpm |
| CFD | computational fluid dynamics |
| UDF | user-defined function |
| atm | atmospheric pressure |
References
- Zhu, X.; Dai, Y.; Ma, F. CFD modelling and numerical simulation on windage power loss of aeronautic high-speed spiral bevel gears. Simul. Model. Pract. Theory 2020, 103, 102080. [Google Scholar] [CrossRef]
- Dai, Y.; Ma, F.; Zhu, X.; Jia, J. Numerical simulation investigation on the windage power loss of a high-speed face gear drive. Energies 2019, 12, 2093. [Google Scholar] [CrossRef] [Green Version]
- Fondelli, T.; Andreini, A.; Facchini, B. Numerical investigation on windage losses of high-speed gears in enclosed configuration. AIAA J. 2018, 56, 1910–1921. [Google Scholar] [CrossRef]
- Zhang, Y.; Hou, X.; Zhang, H.; Zhao, J. Numerical simulation on windage power loss of high-speed spur gear with baffles. Machines 2022, 10, 416. [Google Scholar] [CrossRef]
- Concli, F.; Gorla, C. Analysis of the power losses in geared transmissions–measurements and CFD calculations based on open source codes. In Proceedings of the Open Source CFD International Conference 2013, Hamburg, Germany, 24–25 October 2013. [Google Scholar]
- Zhu, X.; Dai, Y.; Ma, F. Development of a quasi-analytical model to predict the windage power losses of a spiral bevel gear. Tribol. Int. 2020, 146, 106258. [Google Scholar] [CrossRef]
- Massini, D.; Fondelli, T.; Andreini, A.; Facchini, B.; Tarchi, L.; Leonardi, F. Experimental and numerical investigation on windage power losses in high speed gears. In Proceedings of the ASME Turbo Expo 2017, Charlotte, NC, USA, 26–30 June 2017. [Google Scholar]
- Handschuh, R.R.; Kilmain, C.J. Efficiency of High-Speed Helical Gear Trains; Technical Report NASA/TM-2003-212222; ARL-TR-2968; Cleveland OH Glenn Research Center: Cleveland, OH, USA, 2003. [Google Scholar]
- Li, L.; Wang, S.; Zou, H.; Cao, P. Windage loss characteristics of aviation spiral bevel gear and windage reduction mechanism of shroud. Machines 2022, 10, 390. [Google Scholar] [CrossRef]
- Bianchini, C.; Da Soghe, R.; Errico, J.D.; Tarchi, L. Computational analysis of windage losses in an epicyclic gear train. In Proceedings of the ASME Turbo Expo 2017, Charlotte, NC, USA, 26–30 June 2017. [Google Scholar]
- Diab, Y.; Ville, F.; Velex, P.; Changenet, C. Windage losses in high speed gears—Preliminary experimental and theoretical results. J. Mech. Des. 2004, 126, 903–908. [Google Scholar] [CrossRef]
- Aktas, M.K.; Yavuz, M.A.; Ersan, A.K. Computational fluid dynamics simulations of windage loss in a spur gear. In Proceedings of the ASME Turbo Expo 2018, Oslo, Norway, 11–15 June 2018. [Google Scholar]
- Rapley, S.; Eastwick, C.; Simmons, K. The application of CFD to model windage power loss from a spiral bevel gear. In Proceedings of the ASME Turbo Expo 2007, Montreal, QC, Canada, 14–17 May 2007. [Google Scholar]
- Rapley, S.; Eastwick, C.; Simmons, K. Effect of variations in shroud geometry on single phase flow over a shrouded single spiral gear. In Proceedings of the ASME Turbo Expo 2008, Berlin, Germany, 9–13 June 2008. [Google Scholar]
- Arisawa, H.; Nishimura, M.; Imai, H.; Goi, T. CFD simulation for reduction of oil churning loss and windage loss on aeroengine transmission gears. In Proceedings of the ASME Turbo Expo 2009, Orlando, FL, USA, 8–12 June 2009. [Google Scholar]
- He, A.; Deng, R.; Xiong, Y. CFD study on the windage power loss of high speed gear. In Proceedings of the 2018 5th International Conference on Advanced Materials, Mechanics and Structural Engineering, Seoul, Republic of Korea, 19–21 October 2018. [Google Scholar]
- Hill, M.J.; Kunz, R.F.; Medvitz, R.B.; Handschuh, R.F.; Long, L.N.; Noack, R.W.; Morris, P.J. CFD analysis of gear windage losses: Validation and parametric aerodynamic studies. J. Fluid. Eng. 2011, 133, 031103. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Li, L. Computational investigation of baffle influence on windage loss in helical geared transmissions. Tribol. Int. 2021, 156, 106852. [Google Scholar] [CrossRef]
- Al-Shibl, K.; Simmons, K.; Eastwick, C. Modelling windage power loss from an enclosed spur gear. Proc. Inst. Mech. Eng. Part A J. Power Energy 2007, 221, 331–341. [Google Scholar] [CrossRef] [Green Version]
- Zhao, N.; Jia, Q.J. Research on windage power loss of spur gear base on CFD. Appl. Mech. Mater. 2012, 184, 450–455. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, L.; Zhao, Z. Optimal design of computational fluid dynamics: Numerical calculation and simulation analysis of windage power losses in the aviation. Processes 2021, 9, 1999. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, H.; Hong, Z. Research on optimal design method for drag reduction of vacuum pipeline vehicle body. Int. J. Comput. Fluid. D 2019, 33, 77–86. [Google Scholar] [CrossRef]
- Gillani, S.; Panikulam, V.; Sadasivan, S.; Yaoping, Z. CFD analysis of aerodynamic drag effects on vacuum tube trains. J. Appl. Fluid Mech. 2019, 12, 303–309. [Google Scholar] [CrossRef]
- Zhang, Y. Numerical simulation and analysis of aerodynamic drag on a subsonic train in evacuated tube transportation. J. Mod. Transp. 2012, 20, 44–48. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Zhao, L.; Ma, J.; Liu, Y. Aerodynamic simulation of evacuated tube maglev trains with different streamlined designs. J. Mod. Transp. 2012, 20, 115–120. [Google Scholar] [CrossRef] [Green Version]
- Oh, J.-S.; Kang, T.; Ham, S.; Lee, K.-S.; Jang, Y.-J.; Ryou, H.-S.; Ryu, J. Numerical analysis of aerodynamic characteristics of hyperloop system. Energies 2019, 12, 518. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Dai, Y.; Ma, F. On the estimation of the windage power losses of spiral bevel gears: An analytical model and CFD investigation. Simul. Model. Pract. Theory 2021, 110, 102334. [Google Scholar] [CrossRef]
- Li, J.; Qian, X.; Liu, C. Comparative study of different moving mesh strategies for investigating oil flow inside a gearbox. Int. J. Numer Method H 2022, 32, 3504–3525. [Google Scholar] [CrossRef]
- Menter, F. Zonal two equation k-w turbulence models for aerodynamic flows. In Proceedings of the 23rd Fluid Dynamics, Plasmadynamics, and Lasers Conference, Orlando, FL, USA, 6–9 July 1993. [Google Scholar]
- Wang, P.; Zhu, L.; Zhu, Q.; Ji, X.; Wang, H.; Tian, G.; Yao, E. An application of back propagation neural network for the steel stress detection based on barkhausen noise theory. Ndt E Int. 2013, 55, 9–14. [Google Scholar] [CrossRef]
- Gorla, C.; Concli, F.; Stahl, K.; Hhn, B.; Michaelis, K.; Schulthei, H.; Stemplinger, J. Hydraulic losses of a gearbox: CFD analysis and experiments. Tribol. Int. 2013, 66, 337–344. [Google Scholar] [CrossRef]
- Dudley, D.W. Dudley’s Gear Handbook: The Design, Manufacture, and Application of Gears; McGraw Hill Higher Education: Irvine, CA, USA, 1962; pp. 14–21. [Google Scholar]
- Eastwick, C.N.; Johnson, G. Gear windage: A review. J. Mech. Design. 2008, 130, 034001. [Google Scholar] [CrossRef]
- Handschuh, R.F.; Kilmain, C.J. Preliminary comparison of experimental and analytical efficiency results of high-speed helical gear trains. In Proceedings of the ASME 2003 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Chicago, IL, USA, 2–6 September 2003. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Modulus m (mm) | 10 |
| Single tooth width B (mm) | 260 |
| Pressure angle α (◦) | 20 |
| Number of driving gear teeth n1 | 42 |
| Number of driven gear teeth n2 | 83 |
| Rated linear speed of the pitch circle v0 (m/s) | 150 |
| Setting | Choice |
|---|---|
| Solver | Pressure-based |
| Time | Transient |
| Viscous model | SST k-ω |
| Inlet boundary | Velocity-inlet |
| Outlet boundary | Pressure-outlet |
| Dynamic mesh | Smoothing and Remeshing |
| Solution methods | Pressure velocity coupling: SIMPLE Gradient: green-Gauss node based Pressure: PRESTO Momentum: first-order upwind Volume fraction: geo-reconstruct Spatial discretization: first-order upwind |
| Run calculation | Time step: 2 × 10−6 S Number of time steps: 1250 |
| Pressure Moment of Driven Gear (N·m) | Viscous Moment of Driven Gear (N·m) | Pressure Moment of Driving Gear (N·m) | Viscous Moment of Driving Gear (N·m) | |
|---|---|---|---|---|
| Value | −216.42 | −16.50 | 70.82 | 3.47 |
| Pressure Moment of Driven Gear (N·m) | Viscous Moment of Driven Gear(N·m) | Pressure Moment of Driving Gear(N·m) | Viscous Moment of Driving Gear (N·m) | Total Moment (N·m) | |
|---|---|---|---|---|---|
| 1 atm | −437.51 | −28.41 | 140.07 | 6.06 | 612.05 |
| 0.5 atm | −216.42 | −16.50 | 70.82 | 3.47 | 307.21 |
| Driven Gear Moment (N·m) | Driving Gear Moment (N·m) | Driven Gear Windage Loss (kW) | Driving Gear Windage Loss (kW) | Total Windage Loss (kW) | |
|---|---|---|---|---|---|
| 1 atm | −462.56 | 147.55 | 147.6 | 93.1 | 240.7 |
| 0.5 atm | −231.81 | 74.53 | 74.0 | 47.0 | 121.0 |
| Speed (m/s) | Windage Power Loss (kW) |
|---|---|
| 120 | 110.14 |
| 130 | 141.39 |
| 140 | 176.22 |
| 150 | 216.92 |
| 160 | 264.23 |
| 170 | 317.04 |
| Pressure (atm) | Windage Power Loss (kW) |
|---|---|
| 0.2 | 24.9 |
| 0.3 | 38.9 |
| 0.4 | 49.1 |
| 0.5 | 63.0 |
| 0.6 | 74.3 |
| 0.7 | 85.4 |
| 0.8 | 98.0 |
| 0.9 | 110.1 |
| 1 | 122.2 |
| Pressure (atm) | Simulation Value (kW) | The Worst of Five Times | The Best of Five Times |
|---|---|---|---|
| 0.2 | 39.64 | 43.90 (10.7%) | 39.08 (1.4%) |
| 0.3 | 60.62 | 60.58 (0.06%) | 60.63 (0.02%) |
| 0.4 | 78.79 | 73.04 (7.3%) | 79.13 (0.4%) |
| 0.5 | 98.28 | 88.29 (10.2%) | 98.91 (0.6%) |
| 0.6 | 117.84 | 107.14 (9.1%) | 120.03 (1.9%) |
| 0.7 | 137.19 | 131.04 (4.5%) | 141.31 (3.0%) |
| 0.8 | 156.71 | 151.50 (3.3%) | 162.28 (3.6%) |
| 0.9 | 176.22 | 167.74 (4.8%) | 182.82 (3.8%) |
| 1 | 195.53 | 185.56 (5.1%) | 202.76 (3.7%) |
| Pressure (atm) | Simulation Value (kW) | The Worst of Five Times | The Best of Five Times |
|---|---|---|---|
| 0.2 | 39.64 | 40.80 (2.9%) | 39.57 (0.2%) |
| 0.3 | 60.62 | 60.48 (0.2%) | 61.38 (1.3%) |
| 0.4 | 78.79 | 80.11 (1.7%) | 79.28 (0.6%) |
| 0.5 | 98.28 | 99.63 (1.4%) | 98.48 (0.2%) |
| 0.6 | 117.84 | 119.25 (1.2%) | 118.94 (1.0%) |
| 0.7 | 137.19 | 138.99 (1.3%) | 138.94 (1.3%) |
| 0.8 | 156.71 | 158.34 (1.0%) | 157.88 (0.7%) |
| 0.9 | 176.22 | 176.39 (0.1%) | 176.24 (0.02%) |
| 1 | 195.53 | 192.29 (1.7%) | 195.02 (0.3%) |
| Speed (m/s) | Predicted Windage Loss (kW) |
|---|---|
| 120 | 122.8 |
| 130 | 156.1 |
| 140 | 195.1 |
| 150 | 240.9 |
| 160 | 293.6 |
| 170 | 351.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, B.; Zhang, H.; Ding, Y. CFD Modelling and Numerical Simulation of the Windage Characteristics of a High-Speed Gearbox Based on Negative Pressure Regulation. Processes 2023, 11, 804. https://doi.org/10.3390/pr11030804
Huang B, Zhang H, Ding Y. CFD Modelling and Numerical Simulation of the Windage Characteristics of a High-Speed Gearbox Based on Negative Pressure Regulation. Processes. 2023; 11(3):804. https://doi.org/10.3390/pr11030804
Chicago/Turabian StyleHuang, Bo, Hong Zhang, and Yiqun Ding. 2023. "CFD Modelling and Numerical Simulation of the Windage Characteristics of a High-Speed Gearbox Based on Negative Pressure Regulation" Processes 11, no. 3: 804. https://doi.org/10.3390/pr11030804