



A Hybrid Data-Driven and Model-Based Approach for Leak Reduction in Water Distribution Systems Using LQR and Genetic Algorithms
 , , , and
, , , and 
Abstract
:1. Introduction
2. Materials and Methods
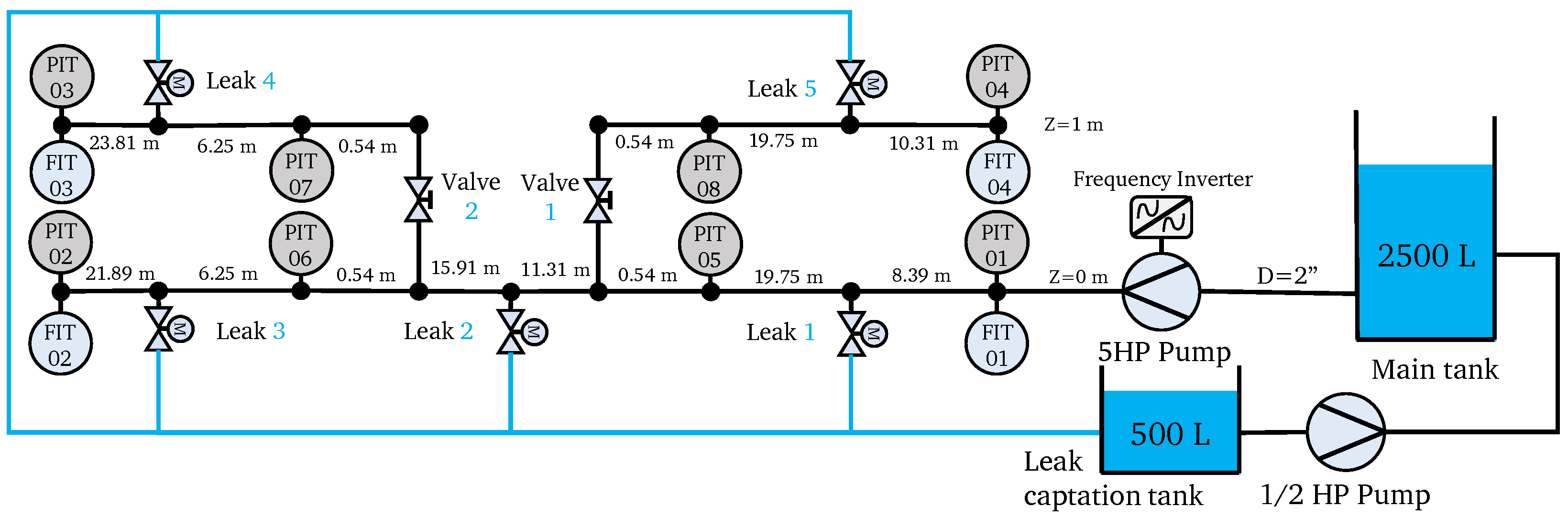
2.1. Case Study and Problem Formulation
2.2. Diagnosis and Control of Leaks
- Leak Location with Genetic Algorithms
- Controller Design
3. Results
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bohorquez, J.; Alexander, B.; Simpson, A.R.; Lambert, M.F. Leak Detection and Topology Identification in Pipelines Using Fluid Transients and Artificial Neural Networks. J. Water Resour. Plan. Manag. 2020, 146, 04020040. [Google Scholar] [CrossRef]
- Khoa Bui, X.; Marlim, S.M.; Kang, D. Water network partitioning into district metered areas: A state-of-the-art review. Water 2020, 12, 1002. [Google Scholar] [CrossRef]
- Peng, Y.; He, M.; Hu, F.; Mao, Z.; Huang, X.; Ding, J. Predictive Modeling of Flexible EHD Pumps using Kolmogorov-Arnold Networks. arXiv 2024, arXiv:2405.07488. [Google Scholar]
- Quiñones-Grueiro, M.; Ares Milián, M.; Sánchez Rivero, M.; Silva Neto, A.J.; Llanes-Santiago, O. Robust leak localization in water distribution networks using computational intelligence. Neurocomputing 2021, 438, 195–208. [Google Scholar] [CrossRef]
- Keramat, A.; Ahmadianfar, I.; Duan, H.F.; Hou, Q. Spectral transient-based multiple leakage identification in water pipelines: An efficient hybrid gradient-metaheuristic optimization. Expert Syst. Appl. 2023, 224, 120021. [Google Scholar] [CrossRef]
- Yousefi-Khoshqalb, E.; Nikoo, M.R.; Gandomi, A.H. Chapter 14—Optimal deployment of sensors for leakage detection in water distribution systems using metaheuristics. In Comprehensive Metaheuristics; Mirjalili, S., Gandomi, A.H., Eds.; Academic Press: Cambridge, MA, USA, 2023; pp. 269–291. [Google Scholar] [CrossRef]
- Gómez-Coronel, L.; Santos-Ruiz, I.; Torres, L.; López-Estrada, F.R.; Gómez-Peñate, S.; Escobar-Gómez, E. Digital Twin of a Hydraulic System with Leak Diagnosis Applications. Processes 2023, 11, 3009. [Google Scholar] [CrossRef]
- Hu, Z.; Chen, W.; Chen, B.; Tan, D.; Zhang, Y.; Shen, D. Robust hierarchical sensor optimization placement method for leak detection in water distribution system. Water Resour. Manag. 2021, 35, 3995–4008. [Google Scholar] [CrossRef]
- Rostami, I.; Darvishi, E. Combining inverse solution method and meta-heuristic algorithm to calculate the amount and location of leaks in water distribution networks. Irrig. Water Eng. 2021, 11, 87–104. [Google Scholar] [CrossRef]
- Shahhosseini, A.; Najarchi, M.; Najafizadeh, M.M.; Hezaveh, M.M. Performance optimization of water distribution network using meta-heuristic algorithms from the perspective of leakage control and resiliency factor (case study: Tehran water distribution network, Iran). Results Eng. 2023, 20, 101603. [Google Scholar] [CrossRef]
- Mashhadi, N.; Shahrour, I.; Attoue, N.; El Khattabi, J.; Aljer, A. Use of machine learning for leak detection and localization in water distribution systems. Smart Cities 2021, 4, 1293–1315. [Google Scholar] [CrossRef]
- Ares-Milián, M.J.; Quiñones-Grueiro, M.; Verde, C.; Llanes-Santiago, O. A leak zone location approach in water distribution networks combining data-driven and model-based methods. Water 2021, 13, 2924. [Google Scholar] [CrossRef]
- Romero-Ben, L.; Alves, D.; Blesa, J.; Cembrano, G.; Puig, V.; Duviella, E. Leak localization in water distribution networks using data-driven and model-based approaches. J. Water Resour. Plan. Manag. 2022, 148, 04022016. [Google Scholar] [CrossRef]
- Hu, X.; Han, Y.; Yu, B.; Geng, Z.; Fan, J. Novel leakage detection and water loss management of urban water supply network using multiscale neural networks. J. Clean. Prod. 2021, 278, 123611. [Google Scholar] [CrossRef]
- Romero-Ben, L.; Cembrano, G.; Puig, V.; Blesa, J. Model-free Sensor Placement for Water Distribution Networks using Genetic Algorithms and Clustering*. IFAC-PapersOnLine 2022, 55, 54–59. [Google Scholar] [CrossRef]
- Galuppini, G.; Creaco, E.; Toffanin, C.; Magni, L. Service pressure regulation in water distribution networks. Control Eng. Pract. 2019, 86, 70–84. [Google Scholar] [CrossRef]
- Ayad, A.; Khalifa, A.; Fawy, M.E.; Moawad, A. An integrated approach for non-revenue water reduction in water distribution networks based on field activities, optimisation, and GIS applications. Ain Shams Eng. J. 2021, 12, 3509–3520. [Google Scholar] [CrossRef]
- Dai, P.D. Optimal pressure management in water distribution systems using an accurate pressure reducing valve model based complementarity constraints. Water 2021, 13, 825. [Google Scholar] [CrossRef]
- Jones, F.T.; Barkdoll, B.D. Viability of pressure-reducing valves for Leak reduction in water distribution systems. Water Conserv. Sci. Eng. 2022, 7, 657–670. [Google Scholar] [CrossRef]
- Tian, Y.; Gao, J.; Chen, J.; Xie, J.; Que, Q.; Munthali, R.M.; Zhang, T. Optimization of pressure management in water distribution systems based on pressure-reducing valve control: Evaluation and case study. Sustainability 2023, 15, 11086. [Google Scholar] [CrossRef]
- Chaudhry, M.H. Applied Hydraulic Transients; Springer: Berlin/Heidelberg, Germany, 2014; Volume 415. [Google Scholar]
- Henrie, M.; Carpenter, P.; Nicholas, R.E. Pipeline Leak Detection Handbook; Gulf Professional Publishing: Houston, TX, USA, 2016. [Google Scholar]
- Tsetimi, J.; Mamadu, E.J. Finite Difference Analysis of Pressure Surge at the Valve of a Closed Pipeline. Int. J. Math. Trends Technol.-IJMTT 2022, 68, 22–35. [Google Scholar] [CrossRef]
- Swamee, P.K.; Jain, A.K. Explicit Equations for Pipe-Flow Problems. J. Hydraul. Div. 1976, 102, 657–664. [Google Scholar] [CrossRef]
- De Persis, C.; Kallesoe, C.S. Pressure regulation in nonlinear hydraulic networks by positive and quantized controls. IEEE Trans. Control. Syst. Technol. 2011, 19, 1371–1383. [Google Scholar] [CrossRef]
- Mirjalili, S. Evolutionary Algorithms and Neural Networks: Theory and Applications, 1st ed.; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2019; pp. 43–55. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef]
- Shao, Y.; Li, K.; Zhang, T.; Ao, W.; Chu, S. Pressure Sampling Design for Estimating Nodal Water Demand in Water Distribution Systems. Water Resour. Manag. 2024, 38, 1511–1527. [Google Scholar] [CrossRef]
- Bermúdez, J.R.; López-Estrada, F.R.; Besançon, G.; Valencia-Palomo, G.; Santos-Ruiz, I. Predictive Control in Water Distribution Systems for Leak Reduction and Pressure Management via a Pressure Reducing Valve. Processes 2022, 10, 1355. [Google Scholar] [CrossRef]
- Gómez-Coronel, L.; Santos-Ruiz, I.; Torres, L.; López-Estrada, F.; Delgado-Aguinaga, J. Model Calibration for a Hydraulic Network Using Genetic Algorithms. Mem. Congr. Nac. Control Automático 2022, 146–251. [Google Scholar] [CrossRef]
- Bermúdez, J.; Santos-Ruiz, I.; López-Estrada, F.; Torres, L.; Puig, V. Diseño y modelado dinámico de una planta piloto para detección de fugas hidráulicas. In Proceedings of the Congreso Nacional de Control Automático CNCA, Monterrey, Mexico, 4–6 October 2017. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Density of water, | 995.736 kg/m3 |
| Kinematic viscosity, | 0.803 × 10−6 m2/s |
| Gravity acceleration, g | 9.81 m/s2 |
| Valve coefficient, | 1.156 |
| Relative roughness, | 0.347 × 10−4 |
| Pipe diameter, d | 0.048 m |
| Pressure wave velocity, c | 422.754 m/s |
| Lenghts and | 38.94 m |
| Lenght | 31.056 m |
| Lenghts and | 38.94 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bermúdez, J.-R.; Gómez-Coronel, L.; López-Estrada, F.-R.; Besançon, G.; Santos-Ruiz, I. A Hybrid Data-Driven and Model-Based Approach for Leak Reduction in Water Distribution Systems Using LQR and Genetic Algorithms. Processes 2024, 12, 1805. https://doi.org/10.3390/pr12091805
Bermúdez J-R, Gómez-Coronel L, López-Estrada F-R, Besançon G, Santos-Ruiz I. A Hybrid Data-Driven and Model-Based Approach for Leak Reduction in Water Distribution Systems Using LQR and Genetic Algorithms. Processes. 2024; 12(9):1805. https://doi.org/10.3390/pr12091805
Chicago/Turabian StyleBermúdez, José-Roberto, Leonardo Gómez-Coronel, Francisco-Ronay López-Estrada, Gildas Besançon, and Ildeberto Santos-Ruiz. 2024. "A Hybrid Data-Driven and Model-Based Approach for Leak Reduction in Water Distribution Systems Using LQR and Genetic Algorithms" Processes 12, no. 9: 1805. https://doi.org/10.3390/pr12091805