The Integration of Collaborative Robot Systems and Their Environmental Impacts



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
- Modularity through integration, coordination, evaluation, and optimization of heterogeneous subsystems (hardware, mobile platforms, actuators/grippers/tools, sustainable energy systems), real-time test/evaluation models, and algorithms for subsystems;
- Cooperative navigation based on the evaluation and optimization of robot movements from the three work environments;
- Coordination and synchronization of end-effector movement while performing system tests (as a whole), streamlining work and navigation paths via the structural integration of components, effectors, and analytical models;
- Engaging robotized subsystems (terrestrial/air/underwater robots) in a collaborative/collective/cooperative way, intuitively and safely in the sense of adaptability to identify the obstacles and orientation uncertainties introduced by the initial algorithms;
- Assimilation of instructions and the updating of working states by performing data interpretation from sensors and comparing the sensor data with the data stored in the assigned software libraries;
- Intuitive plug-and-play systems that consider the fact that the subsystems that form the assembly are heterogeneous;
- Open-source software.
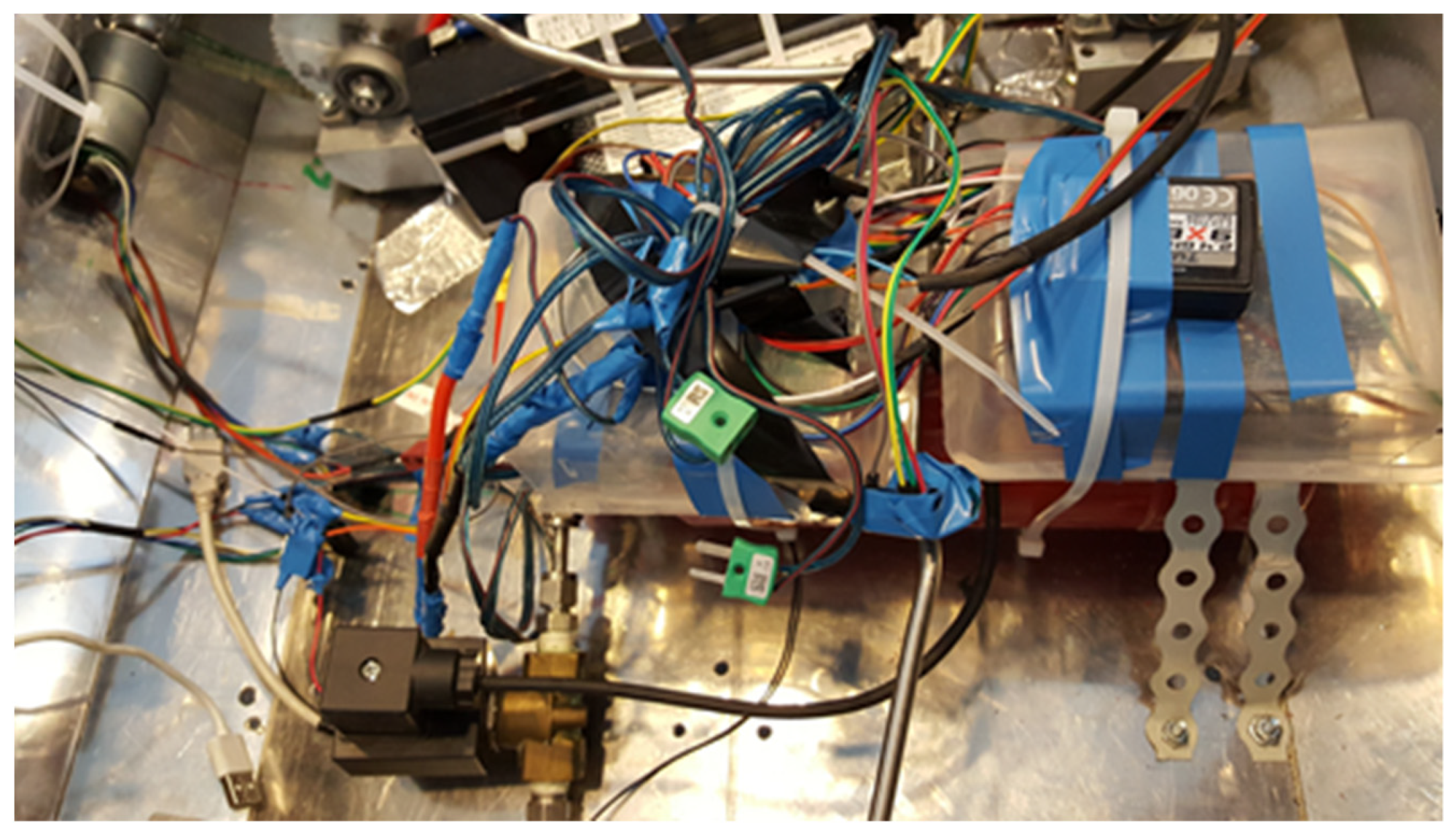
2.1. UGV, the Terrestrial Component of an UAS
- The soil friction coefficient, , based on the tractive force F, the weight of the vehicle Ga, the ground pressure pav, the constant specific value of the soil K, the soil shear coefficient δ, and the length of the contact spot La:
- Unitary shear stress , where s is the slip coefficient
2.2. UAVs, the Aerial Component of an UAS
3. Results
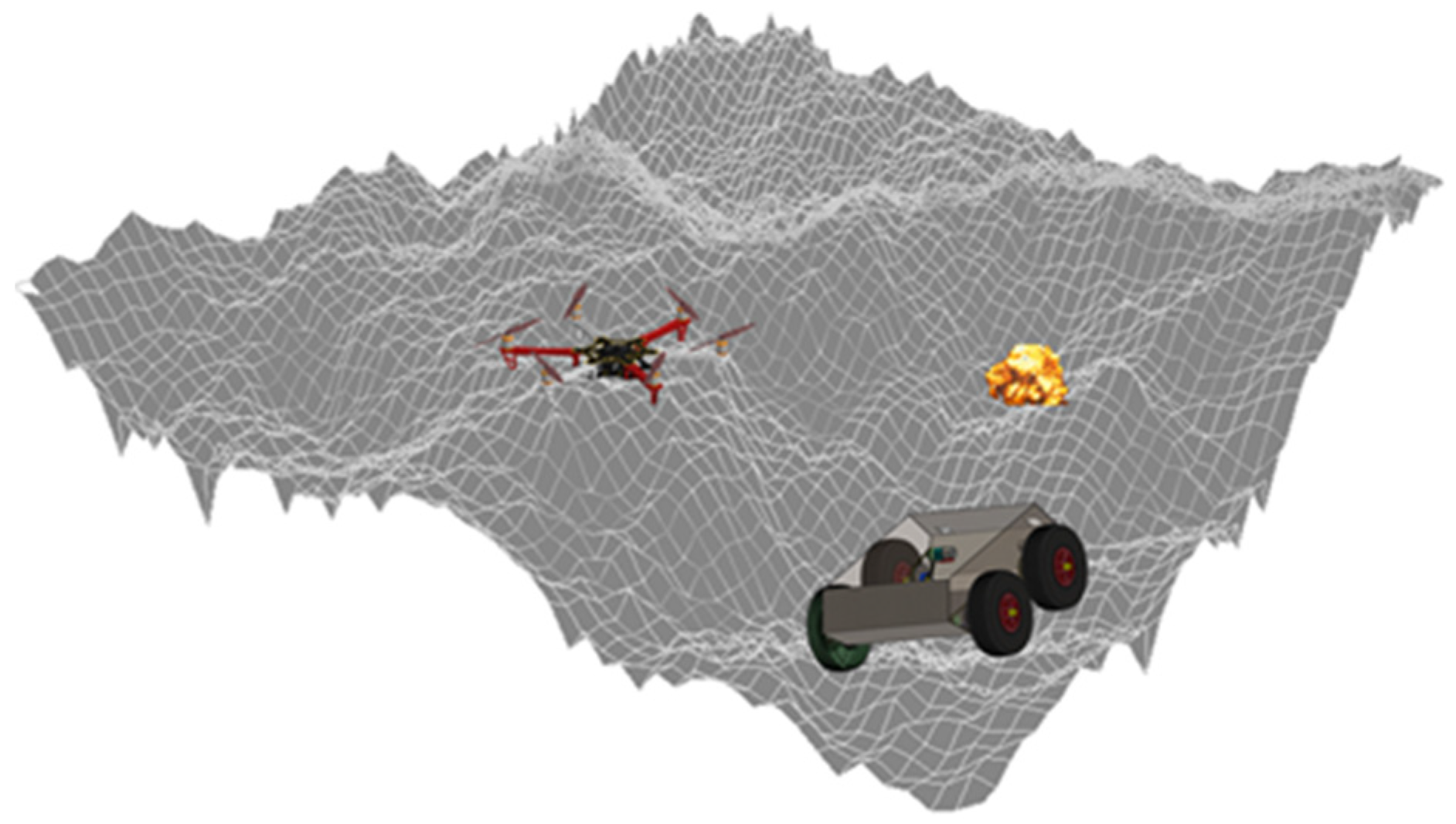
- The hexacopter rises and takes a tour to detect and locate the fire;
- The mini rover receives the information (wireless) and moves to the coordinates where the fire was found;
- The predefined route is a 3D map (Figure 5) of a randomly chosen location;
- Commence movement to the defined target point, continuously calculating the path and indicating its position with respect to the reference system defined as an origin;
- Unknown objects are scanned ultrasonically and via the IR camera;
- At the target, the GCS processes data in real time and generates a new map with an optimized route;
- From this moment, FFR-1-UTM moves to the fire that has been identified using its orthogonal coordinates;
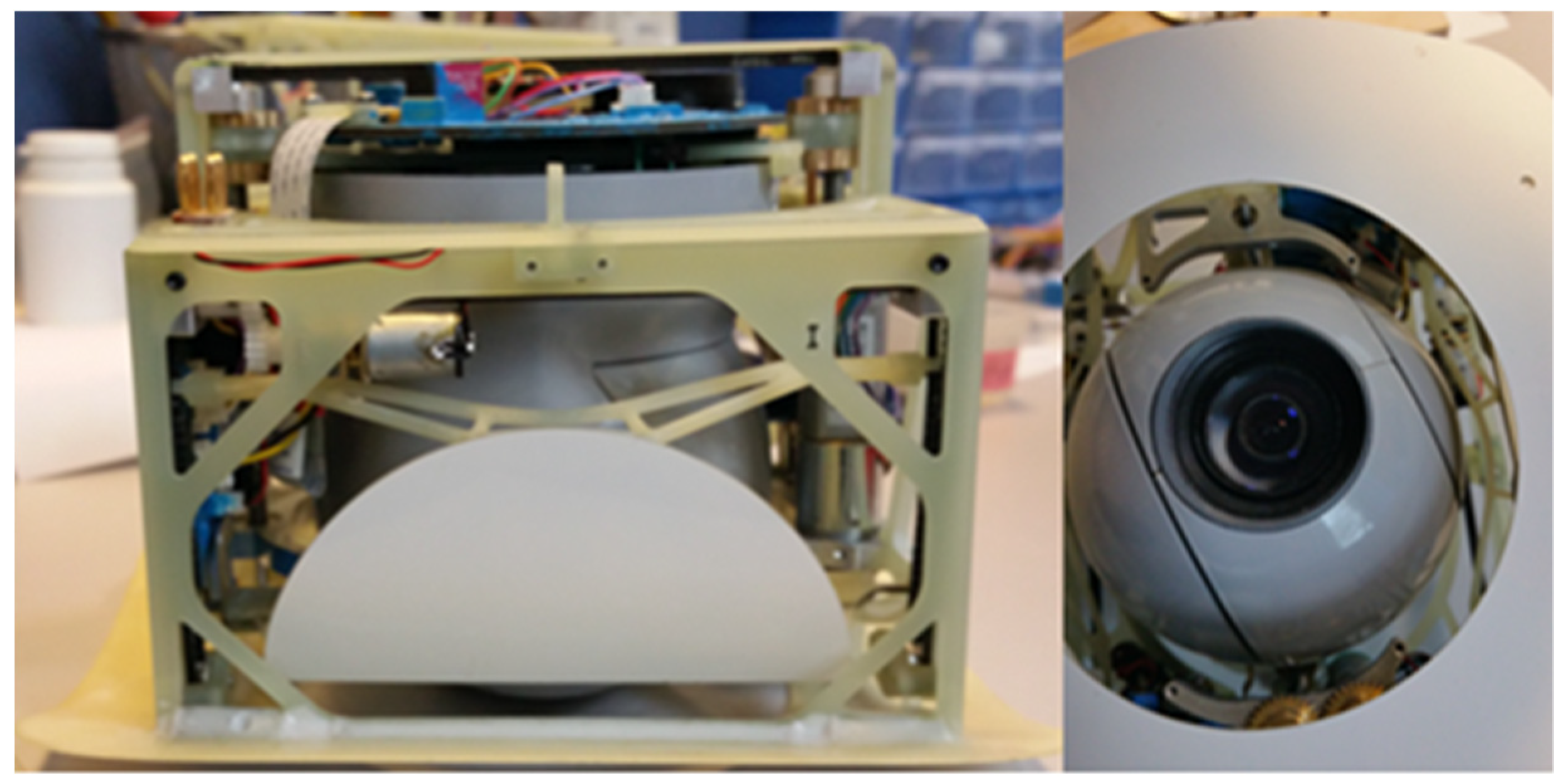
- For feedback, FFR-1-UTM is equipped with a video camera.
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Awad, F.; Naserllah, M.; Omar, A.; Abu-Hantash, A.; Al-Taj, A. Collaborative Indoor Access Point Localization Using Autonomous Mobile Robot Swarm. Sensors 2018, 18, 407. [Google Scholar] [CrossRef] [Green Version]
- Franchi, A.; Freda, L.; Oriolo, G.; Vendittelli, M. The sensor-based random graph method for cooperative robot exploration. IEEE/ASME Trans. Mechatron. 2009, 14, 163–175. [Google Scholar] [CrossRef]
- Jin, J.; Chung, W. Obstacle Avoidance of Two-Wheel Differential Robots Considering the Uncertainty of Robot Motion on the Basis of Encoder Odometry Information. Sensors 2019, 19, 289. [Google Scholar] [CrossRef] [Green Version]
- Laughery, S.; Gerhart, G.; Muench, P. Evaluating Vehicle Mobility Using Bekker’s Equations; US Army TARDEC: Warren, MI, USA, 2000. [Google Scholar]
- Gramegna, T.; Cicirelli, G.; Attolico, G.; Distante, A. Automatic construction of 2D and 3D models during robot inspection. Ind. Robot Int. J. 2006, 33, 387–393. [Google Scholar] [CrossRef]
- Gualda, D.; Ureña, J.; García, J.C.; Lindo, A. Locally-Referenced Ultrasonic–LPS for Localization and Navigation. Sensors 2014, 14, 21750–21769. [Google Scholar] [CrossRef] [PubMed]
- Socas, R.; Dormido, R.; Dormido, S. New Control Paradigms for Resources Saving: An Approach for Mobile Robots Navigation. Sensors 2018, 18, 281. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Z.-X.; Wang, L.; Wang, Y.-M. An Emergency Decision Making Method for Different Situation Response Based on Game Theory and Prospect Theory. Symmetry 2018, 10, 476. [Google Scholar] [CrossRef] [Green Version]
- Ciobotaru, T. Semi-Empiric Algorithm for Assessment of the Vehicle Mobility. Leonardo Electron. J. Pract. Technol. 2009, 8, 19–30. [Google Scholar]
- Hofmann, T.; Niemueller, T.; Lakemeyer, G. Initial Results on Generating Macro Actions from a Plan Database for Planning on Autonomous Mobile Robots. In Proceedings of the Twenty-Seventh International Conference on Automated Planning and Scheduling (ICAPS 2017), Pittsburgh, PA, USA, 18–23 June 2017; AAAI Press: Palo Alto, CA, USA, 2017. [Google Scholar]
- Koo, J.; Cha, H. Localizing WiFi access points using signal strength. IEEE Commun. Lett. 2011, 15, 187–189. [Google Scholar] [CrossRef]
- McCluskey, T.L.; Vaquero, T.; Vallati, M. Engineering Knowledge for Automated Planning: Towards a Notion of Quality. In Mobile Robotics; Nehmzow, U., Ed.; Springer Science & Business Media: Berlin, Germany, 2003. [Google Scholar]
- Amigoni, F. Experimental Evaluation of Some Exploration Strategies for Mobile Robots. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Nice, France, 22–26 September 2008; pp. 2818–2823. [Google Scholar]
- Waharte, S.; Trigoni, N. Supporting search and rescue operations with UAVs. In Proceedings of the 2010 International Conference on Emerging Security Technologies (EST 2010), Canterbury, UK, 6–7 September 2010; pp. 142–147. [Google Scholar]
- Giakoumidis, N.; Bak, J.U.; Gomez, J.V. Pilot-Scale Development of a UAV-UGV Hybrid with Air-Based UGV Path Planning. In Proceedings of the 10th International Conference on Frontiers of Information Technology, Islamabad, Pakistan, 17–19 December 2012; pp. 204–208. [Google Scholar]
- Symington, A.; Waharte, S.; Julier, S.; Trigoni, N. Probabilistic target detection by camera-equipped UAVs. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation (ICRA 2010), Anchorage, AK, USA, 3–8 May 2010; pp. 4076–4082. [Google Scholar]
- Saska, M.; Vonasek, V.; Krajnik, T.; Preucil, L. Coordination and navigation of heterogeneous UAVs-UGVs teams localized by a hawk-eye approach. In Proceedings of the International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 2166–2171. [Google Scholar]
- Wang, X.; Zhu, H.; Zhang, D.; Zhou, D.; Wang, X. Vision-based detection and tracking of a mobile ground target using a fixed-wing UAV. Int. J. Adv. Robot. Syst. 2014, 11, 156. [Google Scholar] [CrossRef]
- Hui, C.; Yousheng, C.; Xiaokun, L.; Shing, W.W. Autonomous Takeoff, Tracking and Landing of a UAV on a Moving UGV Using Onboard Monocular Vision. In Proceedings of the 32nd Chinese Control Conference (CCC), Xi’an, China, 26–28 July 2013; pp. 5895–5901. [Google Scholar]
- Bekker, M.G. Introduction to Terrain-Vehicle Systems; The University of Michigan Press: Ann Arbor, MI, USA, 1969. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicle, 2nd ed.; John Willey & Sons: Hoboken, NJ, USA, 1993. [Google Scholar]
- Ojeda, L.; Borenstein, J.; Witus, G. Terrain Trafficability Characterization with a Mobile Robot. In Proceedings of the SPIE Defense and Security Conference, Unmanned Ground Vehicle Technology VII, Orlando, FL, USA, 28 March–1 April 2005; Dept. of Mechanical Engineering the University of Michigan: Ann Arbor, MI, USA, 2005. [Google Scholar]
- Bedaka, A.K.; Mahmoud, A.M.; Lee, S.-C.; Lin, C.-Y. Autonomous Robot-Guided Inspection System Based on Offline Programming and RGB-D Model. Sensors 2018, 18, 4008. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, E.; Choi, S.; Oh, S. Structured Kernel Subspace Learning for Autonomous Robot Navigation. Sensors 2018, 18, 582. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cepeda, J.S.; Chaimowicz, L.; Soto, R.; Gordillo, J.L.; Alanís-Reyes, E.A.; Carrillo-Arce, L.C. A Behavior-Based Strategy for Single and Multi-Robot Autonomous Exploration. Sensors 2012, 12, 12772–12797. [Google Scholar] [CrossRef] [Green Version]
- Besada-Portas, E.; Lopez-Orozco, J.A.; Lanillos, P.; De la Cruz, J.M. Localization of Non-Linearly Modeled Autonomous Mobile Robots Using Out-of-Sequence Measurements. Sensors 2012, 12, 2487–2518. [Google Scholar] [CrossRef] [PubMed]
- Bradbury, M.; Dasch, J.; Gonzalez, R.; Hodges, H.; Jain, A.; Iagnemma, K.; Letherwood, M.; McCullough, M.; Priddy, J.; Wojtysiak, J.; et al. Next-Generation NATO Reference Mobility Model (NG-NRMM). In Final Report by NATO Exploratory Team ET-148; Dasch, J., Ed.; Alion Science and Technology, USA Paramsothy Jayakumar, US Army TARDEC: Warren, MI, USA, 2016. [Google Scholar]
- Hofmann, T.; Niemueller, T.; Claßen, J.; Lakemeyer, G. Continual Planning in Golog. In Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence (AAAI-16), Phoenix, AZ, USA, 12–17 February 2016; AAAAI Press: Pittsburgh, PA, USA, 2016. [Google Scholar]
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Cressie, N.; Johannesson, G. Fixed Rank kriging for very large Spatial Data Sets. J. R. Stat. Soc. 2008, 70, 209–226. [Google Scholar] [CrossRef]
- Bhattacharjee, S.; Mitra, P.; Ghosh, S.M. Spatial Interpolation to Predict Missing Attributes in GIS Using Semantic Kriging. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4771–4780. [Google Scholar] [CrossRef]
- Nuță, I. Contributions to the Improvement Technology Development and Emergency Intervention. Ph.D. Thesis, Military Technical Academy, Bucharest, Romania, 2015. [Google Scholar]
- Smith, W.C. Modeling of Wheel-Soil Interaction for Small Ground Vehicles Operating on Granular Soil. Ph.D. Thesis, the University of Michigan, Ann Arbor, MI, USA, 2014. [Google Scholar]
- Balch, T.; Arkin, R. Avoiding the Past: A Simple but Effective Strategy for Reactive Navigation. In Proceedings of the 1993 IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 2–6 May 1993; Volume 1, pp. 678–685. [Google Scholar]
- Socas, R.; Dormido, S.; Dormido, R.; Fabregas, E. Event-based control strategy for mobile robots in wireless environments. Sensors 2015, 15, 30076–30092. [Google Scholar] [CrossRef] [Green Version]
- Eaton, C.M.; Chong, E.K.P.; Maciejewski, A.A. Multiple-Scenario Unmanned Aerial System Control: A Systems Engineering Approach and Review of Existing Control Methods. Aerospace 2016, 3, 1. [Google Scholar] [CrossRef] [Green Version]
- AGARD-AR-343. Available online: https://www.abbottaerospace.com/wpdm-package/agard-ar-343 (accessed on 22 April 2017).
- Vidyadharan, A.; Philpott, R., III; Kwasa, B.J.; Bloebaum, C.L. Analysis of Autonomous Unmanned Aerial Systems Based on Operational Scenarios Using Value Modelling. Drones 2017, 1, 5. [Google Scholar] [CrossRef] [Green Version]
- Chow, J.C.K.; Hol, J.D.; Luinge, H. Tightly-Coupled Joint User Self-Calibration of Accelerometers, Gyroscopes, and Magnetometers. Drones 2018, 2, 6. [Google Scholar] [CrossRef] [Green Version]
- Kollar, T.; Roy, N. Trajectory optimization using reinforcement learning for map exploration. Int. J. Robot. Res. 2008, 27, 175–196. [Google Scholar] [CrossRef]
- Texas Instruments. Clarke and Park Transforms in the Field Orientated Control (FOC), Clarke & Park Transforms on the TMS320C2xx Application Report Literature Number: BPRA048. 1997. Available online: http://www.ti.com/lit/an/bpra048/bpra048.pdf (accessed on 15 April 2019).
- Analog Devices Inc. ADSP-21990: Reference Frame Conversions: Park, Inverse Park and Clarke, Inverse Clarke Transformations MSS Software Implementation User Guide. 2002. Available online: https://www.analog.com/media/en/technical-documentation/application-notes/Refframe.pdf (accessed on 15 April 2019).
- Stefan, A.; Stefan, A.; Constantin, D.; Mateescu, C.; Cartal, L.A. Aspects of kinematics and dynamics for Payload UAVs. In Proceedings of the 2015 7th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Bucharest, Romania, 25–27 June 2015. [Google Scholar] [CrossRef]
- Juliá, M.; Gil, A.; Reinoso, O. A comparison of path planning strategies for autonomous exploration and mapping of unknown environments. Auton. Robot. 2012, 33, 427. [Google Scholar] [CrossRef]
- Chou, C.-Y.; Juang, C.-F. Navigation of an Autonomous Wheeled Robot in Unknown Environments Based on Evolutionary Fuzzy Control. Inventions 2018, 3, 3. [Google Scholar] [CrossRef] [Green Version]
- Kashino, Z.; Nejat, G.; Benhabib, B. Aerial Wilderness Search and Rescue with Ground Support. J. Intell. Robot. Syst. 2019. [Google Scholar] [CrossRef]
- Gorostiza, E.M.; Lázaro Galilea, J.L.; Meca Meca, F.J.; Salido Monzú, D.; Espinosa Zapata, F.; Pallarés Puerto, L. Infrared Sensor System for Mobile-Robot Positioning in Intelligent Spaces. Sensors 2011, 11, 5416–5438. [Google Scholar] [CrossRef] [PubMed]





© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grigore, L.S.; Priescu, I.; Joita, D.; Oncioiu, I. The Integration of Collaborative Robot Systems and Their Environmental Impacts. Processes 2020, 8, 494. https://doi.org/10.3390/pr8040494
Grigore LS, Priescu I, Joita D, Oncioiu I. The Integration of Collaborative Robot Systems and Their Environmental Impacts. Processes. 2020; 8(4):494. https://doi.org/10.3390/pr8040494
Chicago/Turabian StyleGrigore, Lucian Stefanita, Iustin Priescu, Daniela Joita, and Ionica Oncioiu. 2020. "The Integration of Collaborative Robot Systems and Their Environmental Impacts" Processes 8, no. 4: 494. https://doi.org/10.3390/pr8040494
APA StyleGrigore, L. S., Priescu, I., Joita, D., & Oncioiu, I. (2020). The Integration of Collaborative Robot Systems and Their Environmental Impacts. Processes, 8(4), 494. https://doi.org/10.3390/pr8040494