Fault Detection and Isolation for a Cooling System of Fuel Cell via Model-based Analysis

Abstract
:1. Introduction
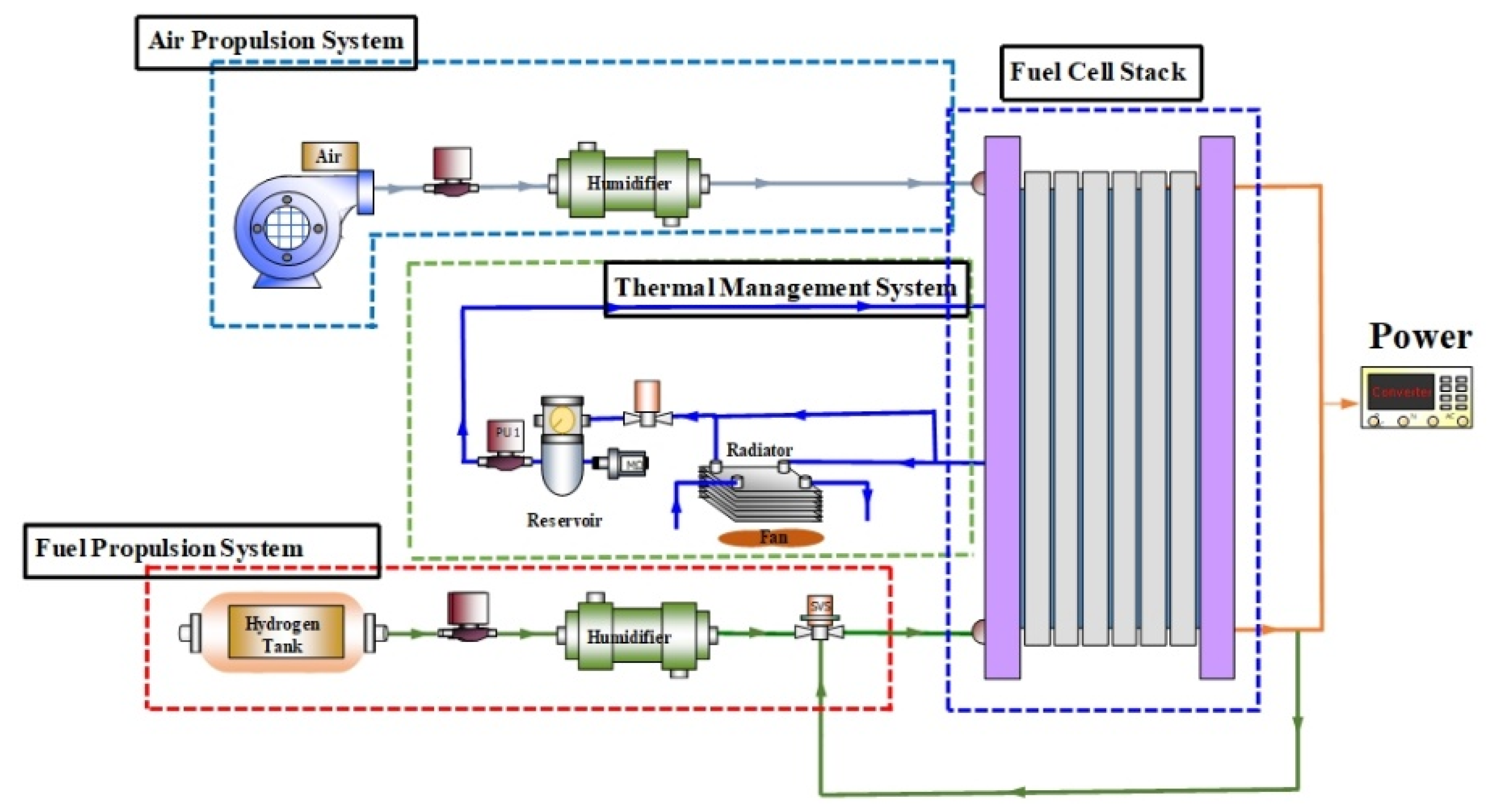
2. Nonlinear Model for Normal Operation Conditions
- The fuel on the anode side contains hydrogen and water vapour and the air on the cathode side contains oxygen, nitrogen, and water vapour;
- In the humidifier model, the injected water is vaporized without heat losses;
- Both the fuel and air were assumed to be ideal gases;
- The temperature in the fuel cell stack is uniform; and
- The electrochemical reaction is quasi-steady.
2.1. Fault Free Model of Fuel Cell System
2.1.1. Air Supply Model
2.1.2. Hydrogen Supply Model
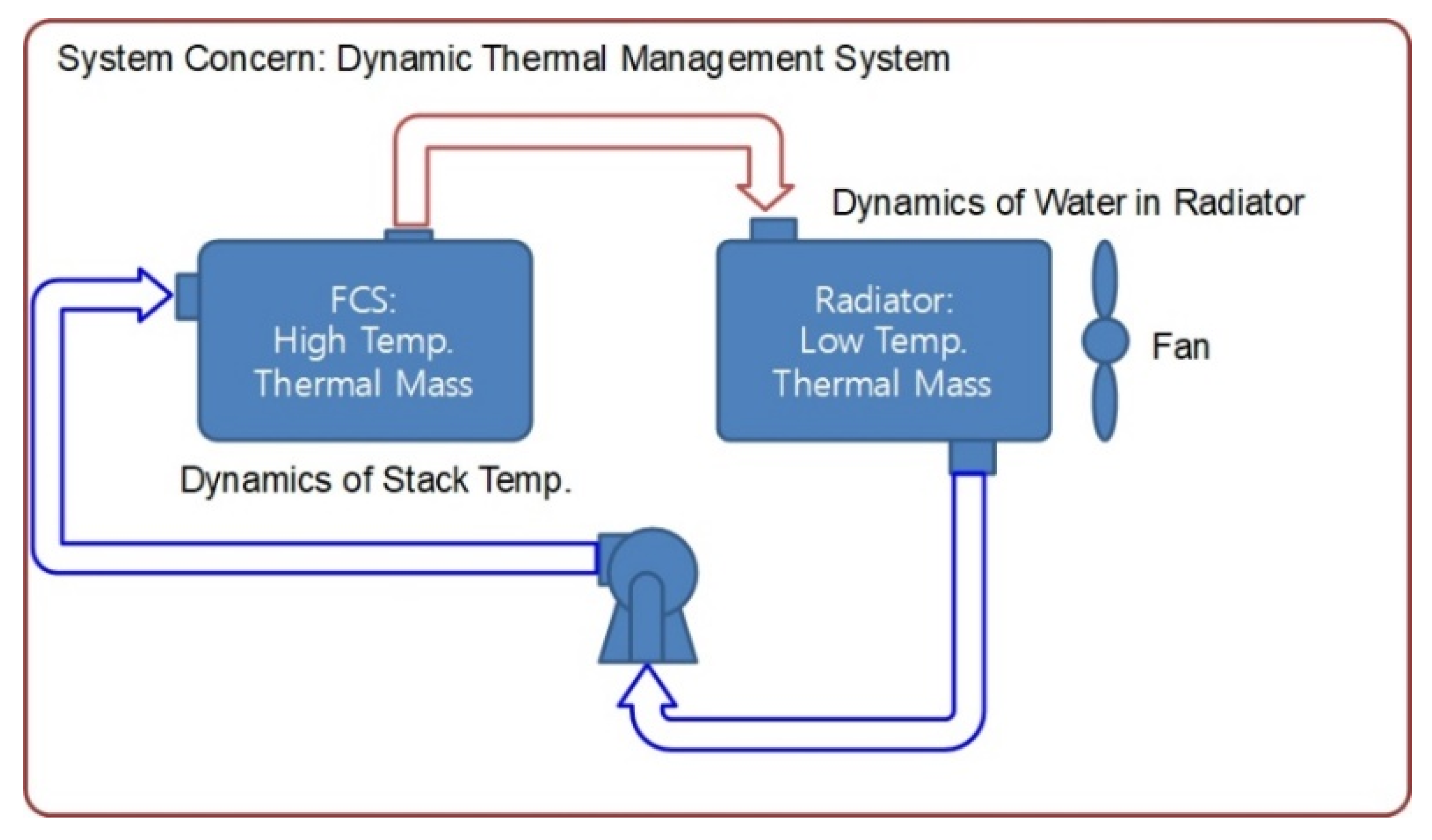
2.1.3. Dynamic Model
2.1.4. Electrochemical Reaction Model
2.2. State Variables for Design of FDI
3. Application of Fault Detection and Isolation
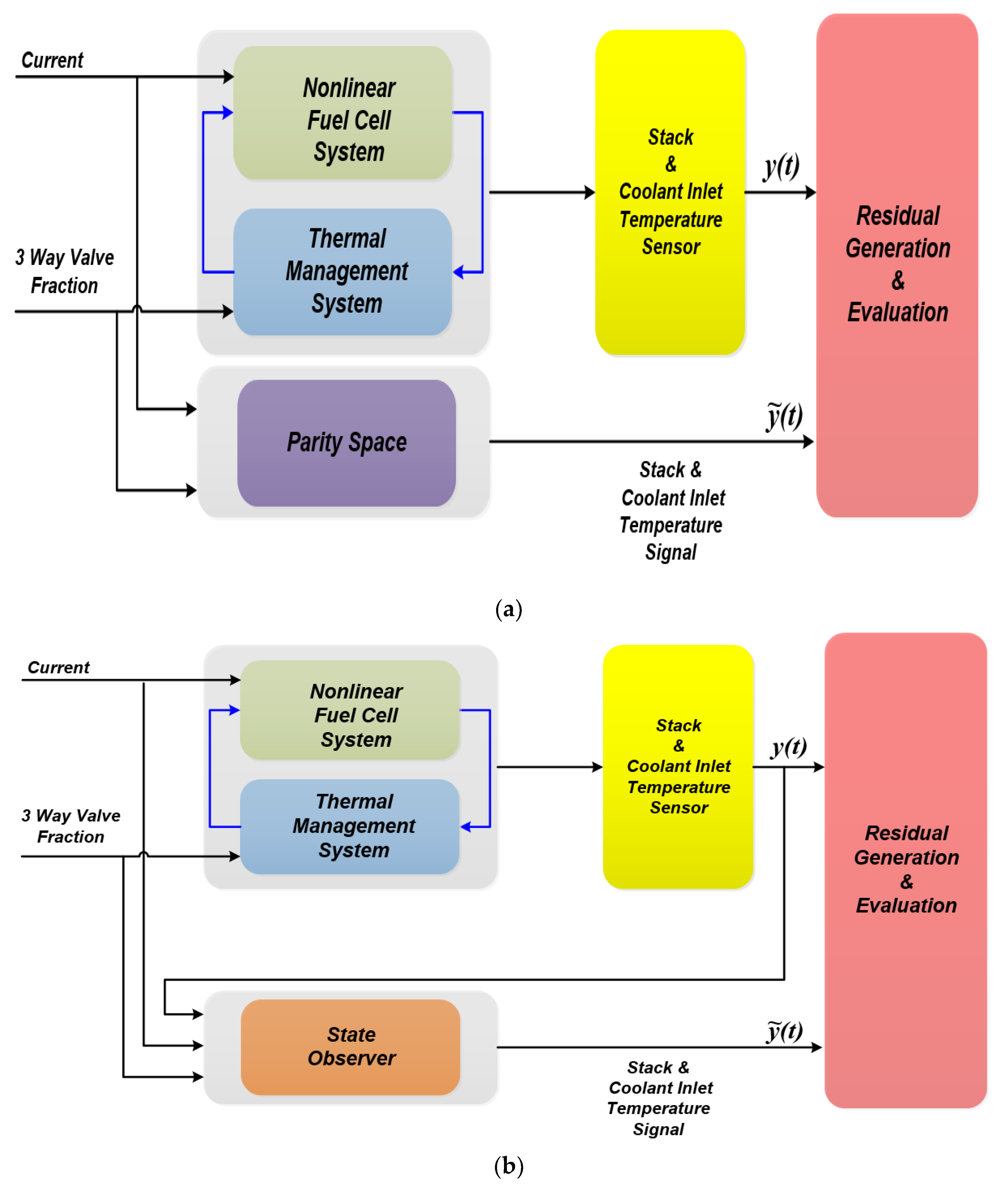
3.1. Scheme of Model-Based FDI
3.2. Fault Definition Model
3.3. Model-Based FDI Design
3.3.1. Design of Parity Space Algorithm
3.3.2. Design of State Observer Algorithm
3.3.3. Design of Kalman Filter Algorithm
3.4. Residual Generation between Nonlinear System and Fault Free Model
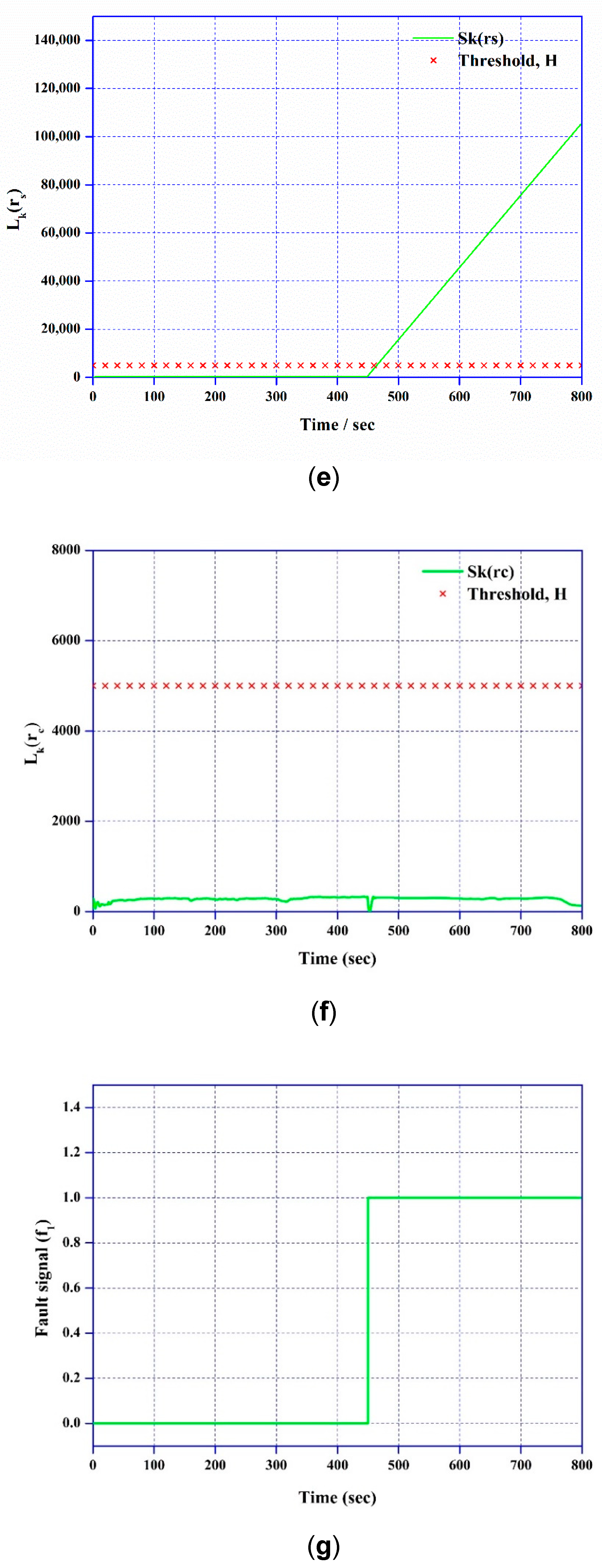
3.5. Fault of Sensor Evaluation with Residual and Isolation
4. Results and Discussion
4.1. Validation of Stack Model by Polarization Curve
4.2. Fault Scenarios
4.3. Fault Detection and Isolation System
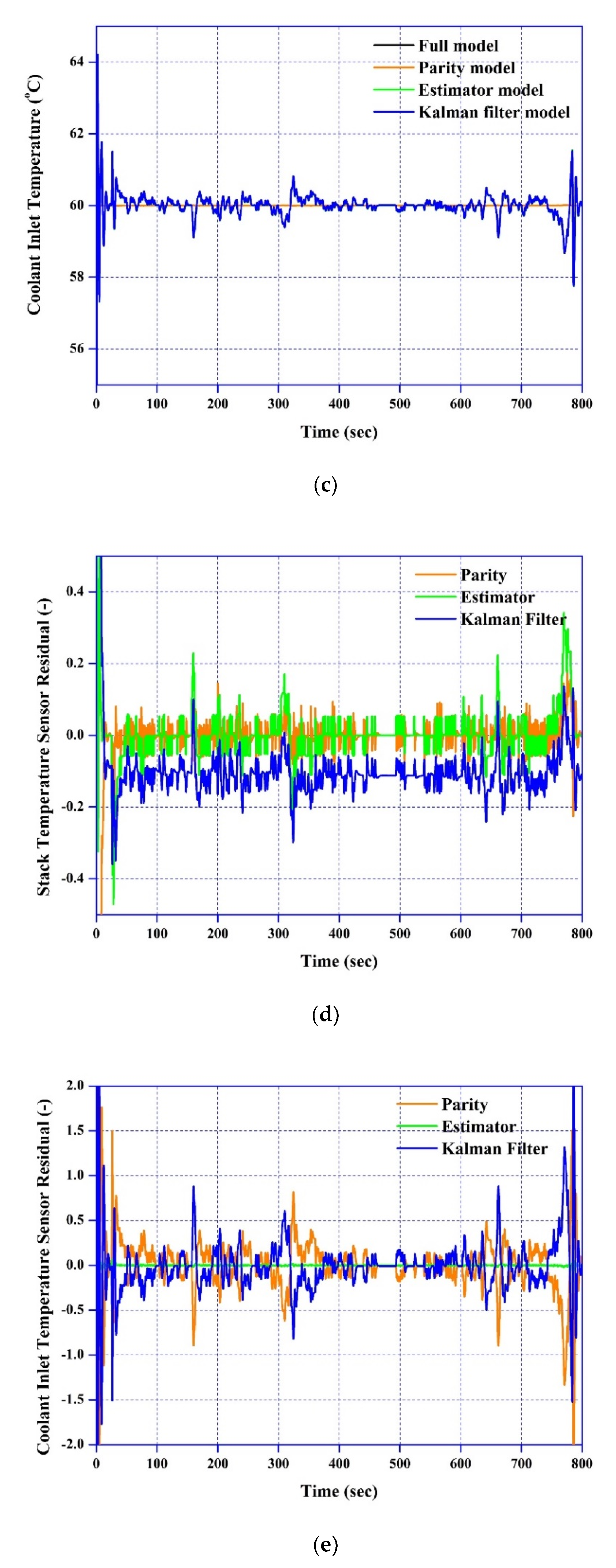
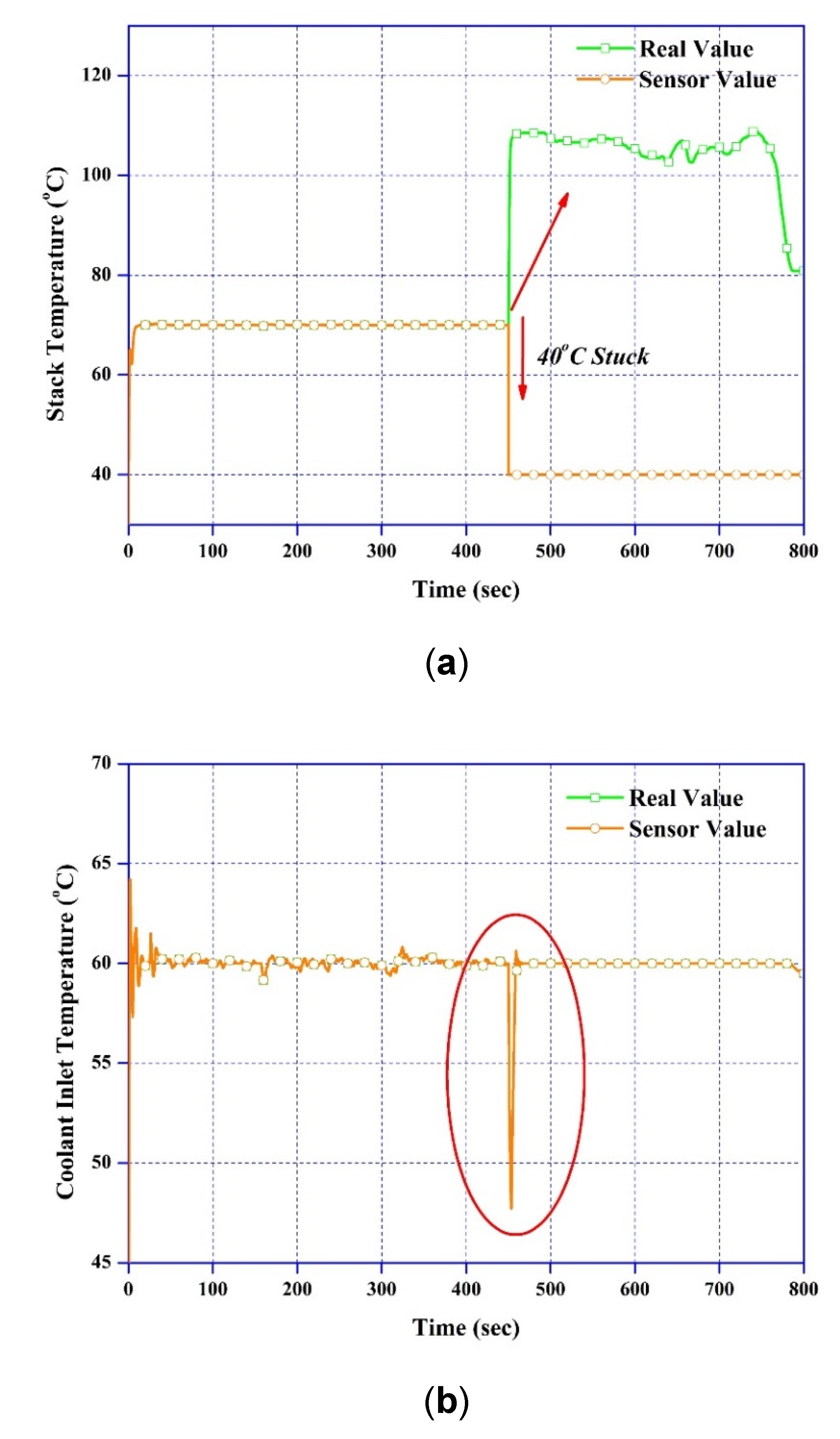
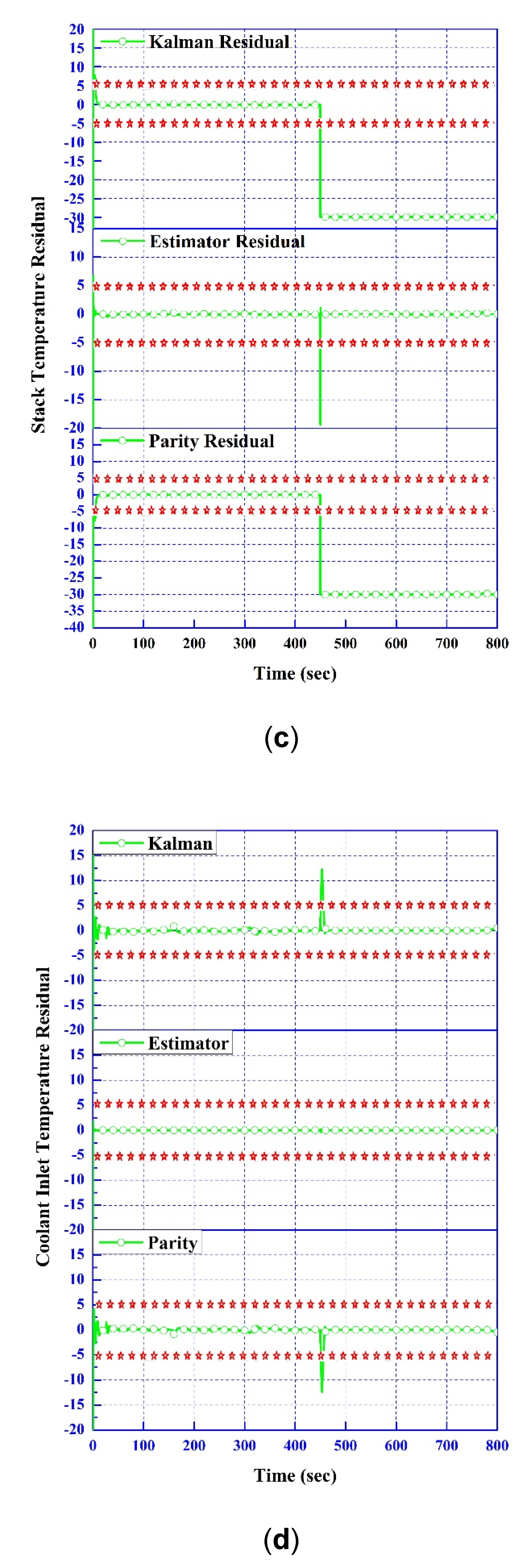
4.3.1. Fault Detection and Isolation with Stack Temperature Sensor Stuck
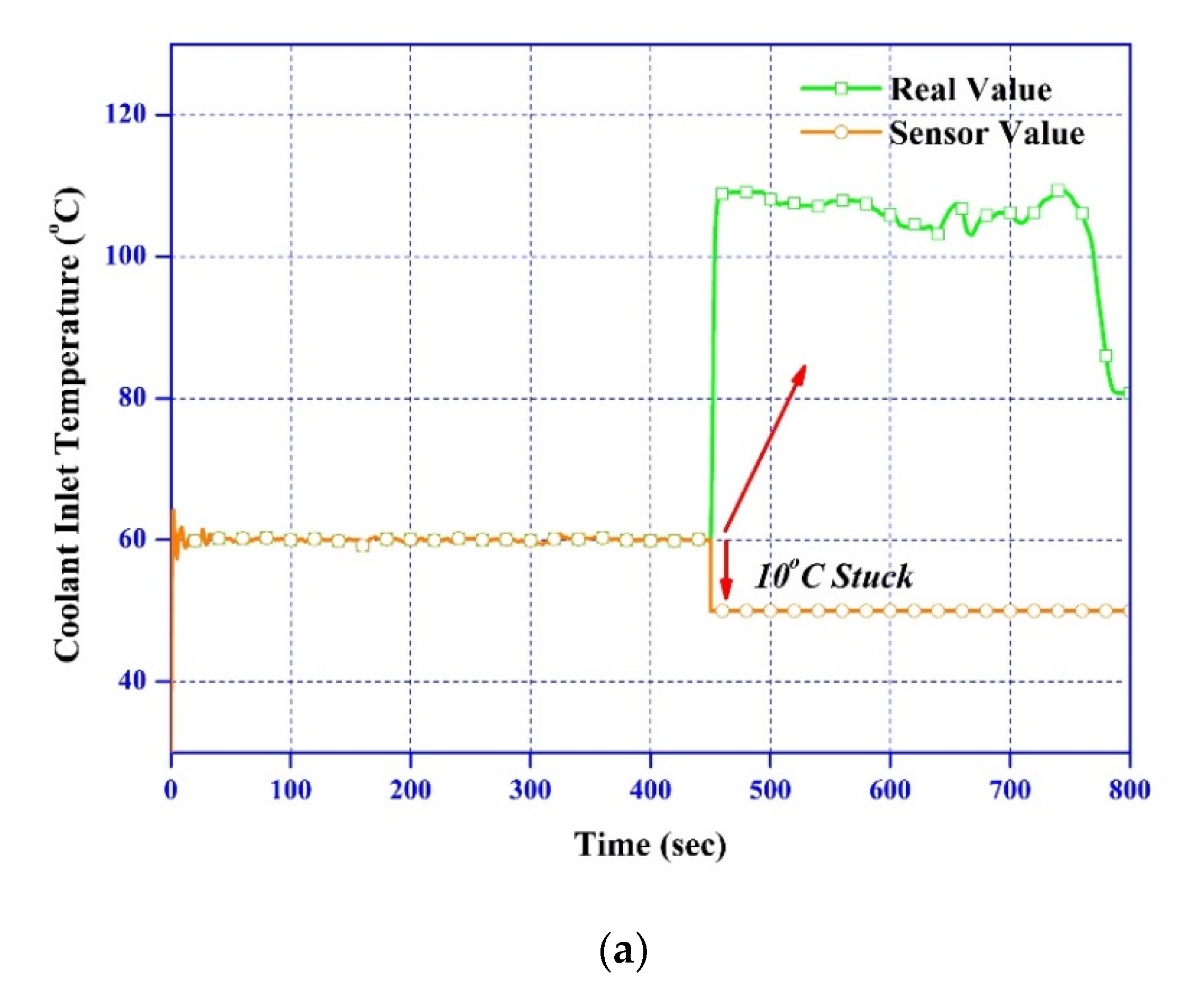
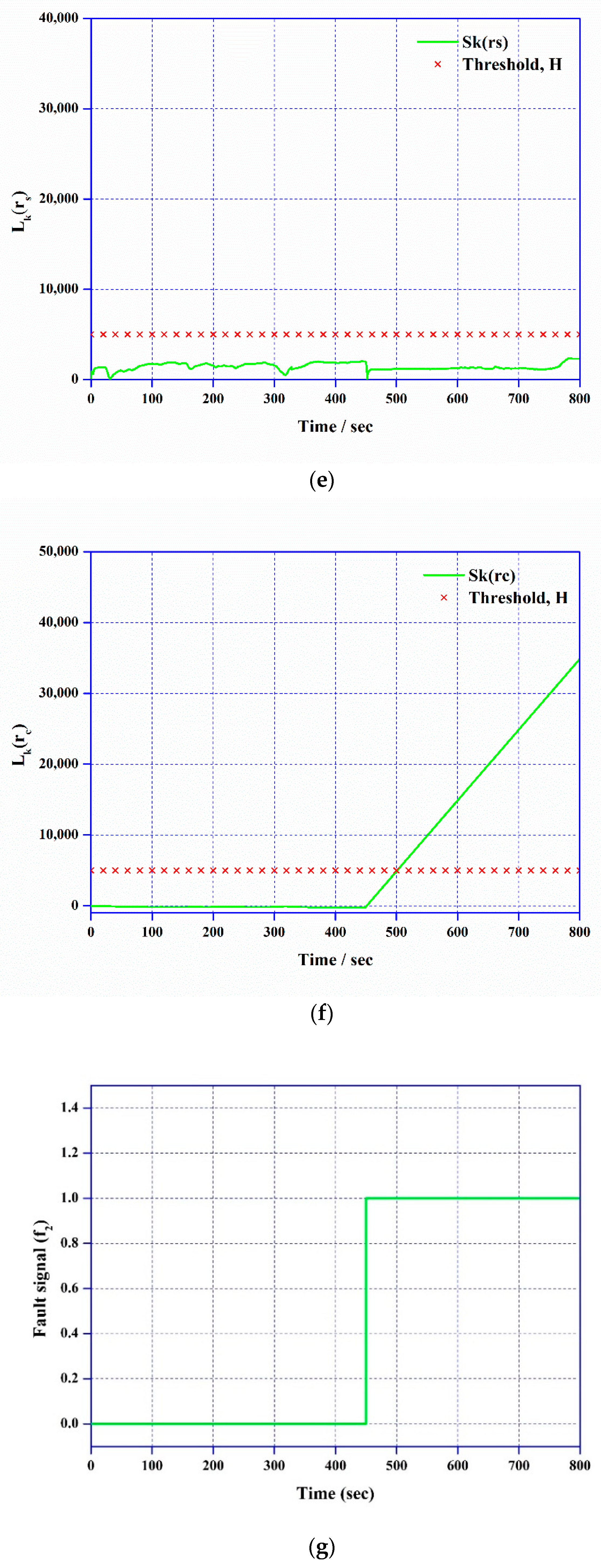
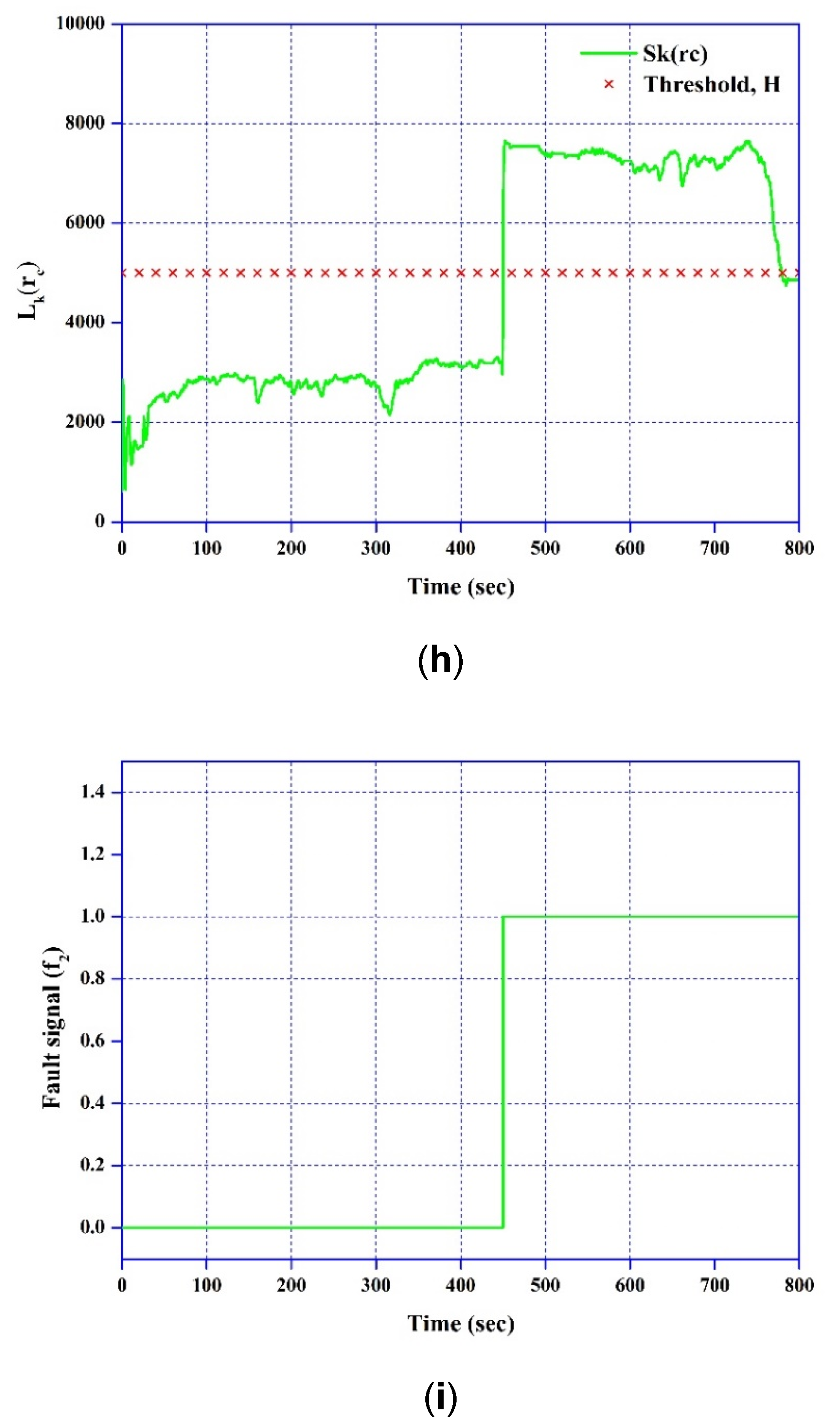
4.3.2. Fault Detection and Isolation with Coolant Inlet Temperature Sensor Stuck
4.3.3. Fault Detection and Isolation by Scaling of Coolant Inlet Temperature Sensor
5. Conclusions
- The parity equation, state observer, and Kalman filter methods for fault detection were developed in this study. The temperature outputs of a nonlinear fuel cell system were monitored; then, estimated linear model outputs were compared with those of the nonlinear fuel cell system to generate a residual. The generated residuals were evaluated by the CUSUM method to identify the presence of a sensor fault.
- The fuel cell was operated under normal conditions, with a load step, to determine the allowed residual threshold. The HWFET driving cycle was used to evaluate the proposed fault diagnosis methods under real vehicle operating conditions.
- The proposed FDI schemes can effectively detect faults in the stack temperature sensor and coolant inlet temperature sensor. In addition, CUSUM can effectively identify locations of temperature irregularity.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| A | Active area [cm2] |
| c | Concentration [-] |
| f | Fault signal [-] |
| H | Energy of the electrochemical reaction [J] |
| h | Enthalpy [J] |
| I | Current [A] |
| J | Current density [A/cm2] |
| M | Molecular weight [-] |
| m | Air flow rate [kg/s] |
| n | Number of cells [-] |
| η | Efficiency [%/100] |
| p | Pressure [Pa] |
| Q | Heat transfer rate [kW] |
| R | Local resistance [Ωcm2] |
| γ | Ratio of specific heats [-] |
| sto | Stoichiometry ratio [-] |
| T | Temperature [K] |
| t | Thickness [m] |
| V | Voltage [V] |
| y | Mass fraction [-] |
| Subscripts and Superscripts | |
| act | Activation |
| an | Anode |
| bl | Blower |
| c | Coolant |
| cell | Cell |
| cool | Coolant side |
| gas | Gas side |
| in | Inlet |
| mem | Membrane |
| nern | Nernst voltage |
| out | Outlet |
| RV | Reservoir |
| rea | Reaction |
| ref | Reference |
| sat | Saturation |
| surr | Surrounding |
| sta | Stack |
References
- Da Fonseca, R.; Bideaux, E.; Gerard, M.; Jeanneret, B.; Desbois-Renaudin, M.; Sari, A. Control of PEMFC system air group using differential flatness approach: Validation by a dynamic fuel cell system model. Appl. Energy 2014, 113, 219–229. [Google Scholar] [CrossRef]
- Jinlong, L.; Tongxiang, L.; Hongyun, L. Effect of grain refinement and electrochemical nitridation on corrosion resistance of the 316L stainless steel for bipolar plates in PEMFCs environment. J. Power Sources 2015, 293, 692–697. [Google Scholar] [CrossRef]
- Mousa, G.; Golnaraghi, F.; DeVaal, J.; Young, A. Detecting proton exchange membrane fuel cell hydrogen leak using electrochemical impedance spectroscopy method. J. Power Sources 2014, 246, 110–116. [Google Scholar] [CrossRef]
- Xu, L.; Mueller, C.D.; Li, J.; Ouyang, M.; Hu, Z. Multi-objective component sizing based on optimal energy management strategy of fuel cell electric vehicles. Appl. Energy 2015, 157, 664–674. [Google Scholar] [CrossRef]
- Feroldi, D.; Carignano, M. Sizing for fuel cell/supercapacitor hybrid vehicles based on stochastic driving cycles. Appl. Energy 2016, 183, 645–658. [Google Scholar] [CrossRef]
- Bizon, N. On tracking robustness in adaptive extremum seeking control of the fuel cell power plants. Appl. Energy 2010, 87, 3115–3130. [Google Scholar] [CrossRef]
- Simons, A.; Bauer, C. A life-cycle perspective on automotive fuel cells. Appl. Energy 2015, 157, 884–896. [Google Scholar] [CrossRef]
- Xuewei, P.; Rathore, A.K. Novel Bidirectional Snubberless Naturally Commutated Soft-Switching Current-Fed Full-Bridge Isolated DC/DC Converter for Fuel Cell Vehicles. IEEE Trans. Ind. Electron. 2013, 61, 2307–2315. [Google Scholar] [CrossRef]
- Yuan, X.-Z.; Li, H.; Zhang, S.; Martin, J.; Wang, H. A review of polymer electrolyte membrane fuel cell durability test protocols. J. Power Sources 2011, 196, 9107–9116. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Chen, K.S.; Mishler, J.; Cho, S.C.; Adroher, X.C. A review of polymer electrolyte membrane fuel cells: Technology, applications, and needs on fundamental research. Appl. Energy 2011, 88, 981–1007. [Google Scholar] [CrossRef] [Green Version]
- Pei, P.; Li, Y.; Xu, H.; Wu, Z. A review on water fault diagnosis of PEMFC associated with the pressure drop. Appl. Energy 2016, 173, 366–385. [Google Scholar] [CrossRef]
- Shao, M.; Zhu, X.-J.; Cao, H.-F.; Shen, H.-F. An artificial neural network ensemble method for fault diagnosis of proton exchange membrane fuel cell system. Energy 2014, 67, 268–275. [Google Scholar] [CrossRef]
- Pahon, E.; Steiner, N.Y.; Jemei, S.; Hissel, D.; Mocoteguy, P. A signal-based method for fast PEMFC diagnosis. Appl. Energy 2016, 165, 748–758. [Google Scholar] [CrossRef]
- Escobet, T.; Feroldi, D.; De Lira, S.; Puig, V.; Quevedo, J.; Riera, J.; Serra, M. Model-based fault diagnosis in PEM fuel cell systems. J. Power Sources 2009, 192, 216–223. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Outbib, R.; Giurgea, S.; Hissel, D.; Li, Y. Fault detection and isolation for Polymer Electrolyte Membrane Fuel Cell systems by analyzing cell voltage generated space. Appl. Energy 2015, 148, 260–272. [Google Scholar] [CrossRef]
- Puig, V.; Feroldi, D.; Serra, M.; Quevedo, J.; Riera, J. Fault-Tolerant MPC Control of PEM Fuel Cells. IFAC Proc. Vol. 2008, 41, 11112–11117. [Google Scholar] [CrossRef]
- Mocoteguy, P.; Ludwig, B.; Steiner, N.Y. Application of current steps and design of experiments methodology to the detection of water management faults in a proton exchange membrane fuel cell stack. J. Power Sources 2016, 303, 126–136. [Google Scholar] [CrossRef]
- Polverino, P.; Frisk, E.; Jung, D.; Krysander, M.; Pianese, C. Model-based diagnosis through Structural Analysis and Causal Computation for automotive Polymer Electrolyte Membrane Fuel Cell systems. J. Power Sources 2017, 357, 26–40. [Google Scholar] [CrossRef] [Green Version]
- Rosich, A.; Sarrate, R.; Nejjari, F. On-line model-based fault detection and isolation for PEM fuel cell stack systems. Appl. Math. Model. 2014, 38, 2744–2757. [Google Scholar] [CrossRef]
- Zhang, L.; Huang, A.Q. Model-based fault detection of hybrid fuel cell and photovoltaic direct current power sources. J. Power Sources 2011, 196, 5197–5204. [Google Scholar] [CrossRef]
- De Lira, S.; Puig, V.; Quevedo, J.; Husar, A. LPV observer design for PEM fuel cell system: Application to fault detection. J. Power Sources 2011, 196, 4298–4305. [Google Scholar] [CrossRef] [Green Version]
- Kamal, M.; Yu, D.; Yu, D. Fault detection and isolation for PEM fuel cell stack with independent RBF model. Eng. Appl. Artif. Intell. 2014, 28, 52–63. [Google Scholar] [CrossRef]
- Yu, S.; Han, J.; Lee, S.M.; Lee, Y.D.; Ahn, K.Y. A Dynamic Model of PEMFC System for the Simulation of Residential Power Generation. J. Fuel Cell Sci. Technol. 2010, 7, 061009. [Google Scholar] [CrossRef]
- Han, J.; Yu, S.; Yi, S. Advanced thermal management of automotive fuel cells using a model reference adaptive control algorithm. Int. J. Hydrogen Energy 2017, 42, 4328–4341. [Google Scholar] [CrossRef]
- Han, J.; Yu, S.; Yi, S. Adaptive control for robust air flow management in an automotive fuel cell system. Appl. Energy 2017, 190, 73–83. [Google Scholar] [CrossRef]
- Han, J.; Park, J.; Yu, S. Control strategy of cooling system for the optimization of parasitic power of automotive fuel cell system. Int. J. Hydrogen Energy 2015, 40, 13549–13557. [Google Scholar] [CrossRef]
- Franklin, G.F.; Powell, J.D.; Emami-Naeini, A. Feedback Control of Dynamic Systems, 6th ed.; Pearson: New York, NY, USA, 2010; pp. 63–68. [Google Scholar]
- Amphlett, J.C.; Baumert, R.M.; Mann, R.F.; Peppley, B.A.; Roberge, P.R.; Harris, T.J. Performance modeling of the Ballard Mark IV solid polymer electrolyte fuel cell I. Mechanistic model development. J. Electrochem. Soc. 1995, 142, 1–8. [Google Scholar] [CrossRef]
- Mammar, K.; Chaker, A. Modelling and fuzzy logic control of PEM fuel cell system power generation for residential application. J. Electr. Electron. Eng. 2009, 9, 1073–1081. [Google Scholar]
- Chen, C.-T. Linear System Theory and Design -3/E; OXFORD: London, UK, 2004. [Google Scholar]
- Martinez-Guerra, R.; Mata-Machuca, J.L. Fault Detection and Diagnosis in Nonlinear Systems; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal | Fault Description | Type | Magnitude |
|---|---|---|---|
| f1 | A suddenly stuck fault occurs after 450 s in stack temperature sensor | Sensor stuck | 40 °C |
| f2 | A suddenly stuck fault occurs after 450 s in coolant inlet temperature sensor | Sensor stuck | 10 °C |
| f3 | Suddenly scaling occurs after 300 s in coolant inlet temperature sensor | Sensor scaling | −20% |
| Residual Type | Sensor | Standard Deviation | Allowed Deviation |
|---|---|---|---|
| Parity | Stack Stack | 6.27 | |
| Coolant Inlet | 3.18 | ||
| Estimator | Stack Stack | 4.79 | |
| Coolant Inlet | 1.45 | ||
| Kalman | Stack Stack | 0.004286 | |
| Coolant Inlet | 0.026468 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, J.; Yu, S.; Han, J. Fault Detection and Isolation for a Cooling System of Fuel Cell via Model-based Analysis. Processes 2020, 8, 1115. https://doi.org/10.3390/pr8091115
Han J, Yu S, Han J. Fault Detection and Isolation for a Cooling System of Fuel Cell via Model-based Analysis. Processes. 2020; 8(9):1115. https://doi.org/10.3390/pr8091115
Chicago/Turabian StyleHan, Jaesu, Sangseok Yu, and Jaeyoung Han. 2020. "Fault Detection and Isolation for a Cooling System of Fuel Cell via Model-based Analysis" Processes 8, no. 9: 1115. https://doi.org/10.3390/pr8091115