A Novel Computational Method to Identify/Analyze Hysteresis Loops of Hard Magnetic Materials




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Models
2.1. Hard Ferromagnetic Materials
Neodymium Magnets
2.2. Hysteresis Models
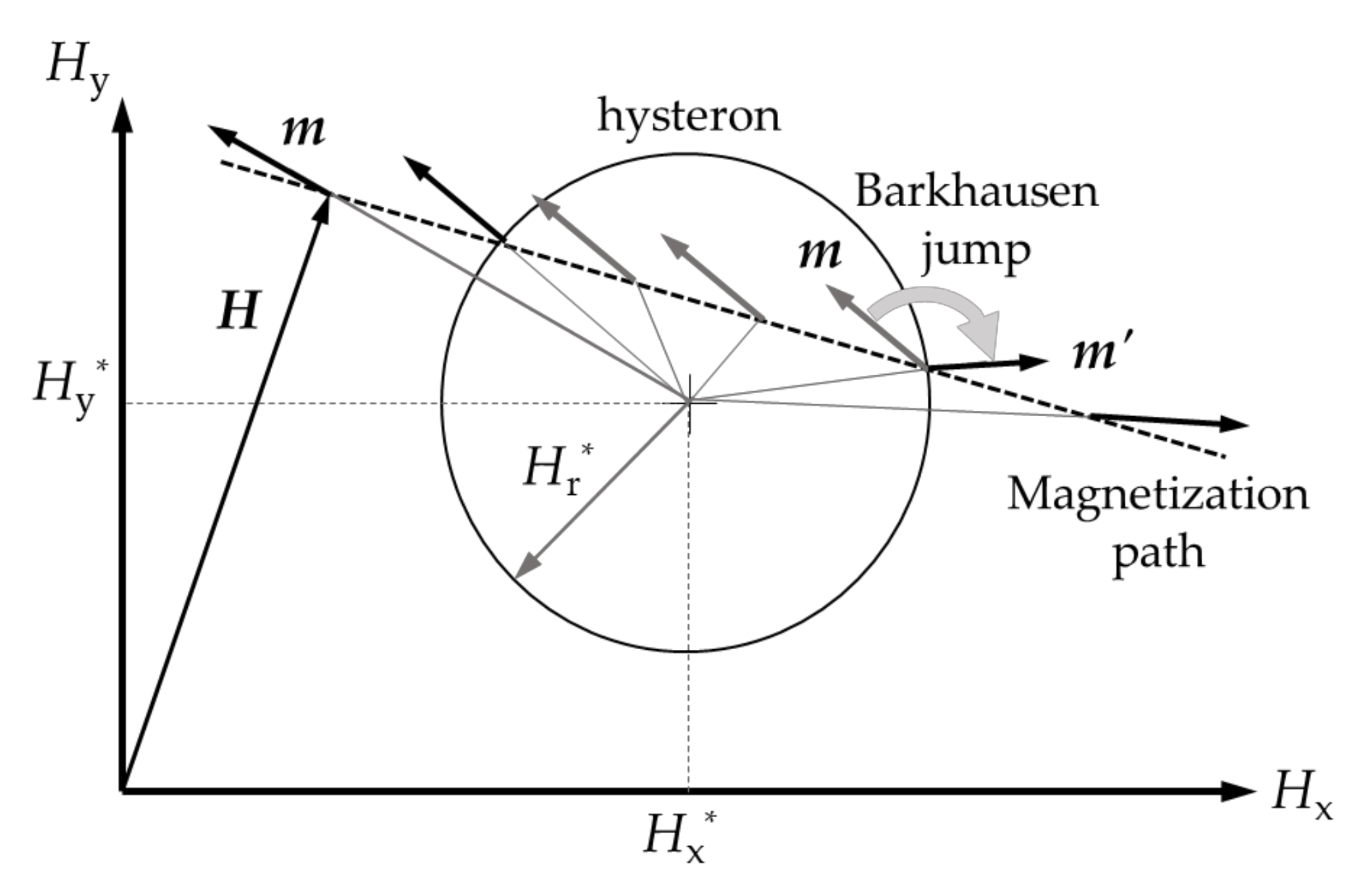
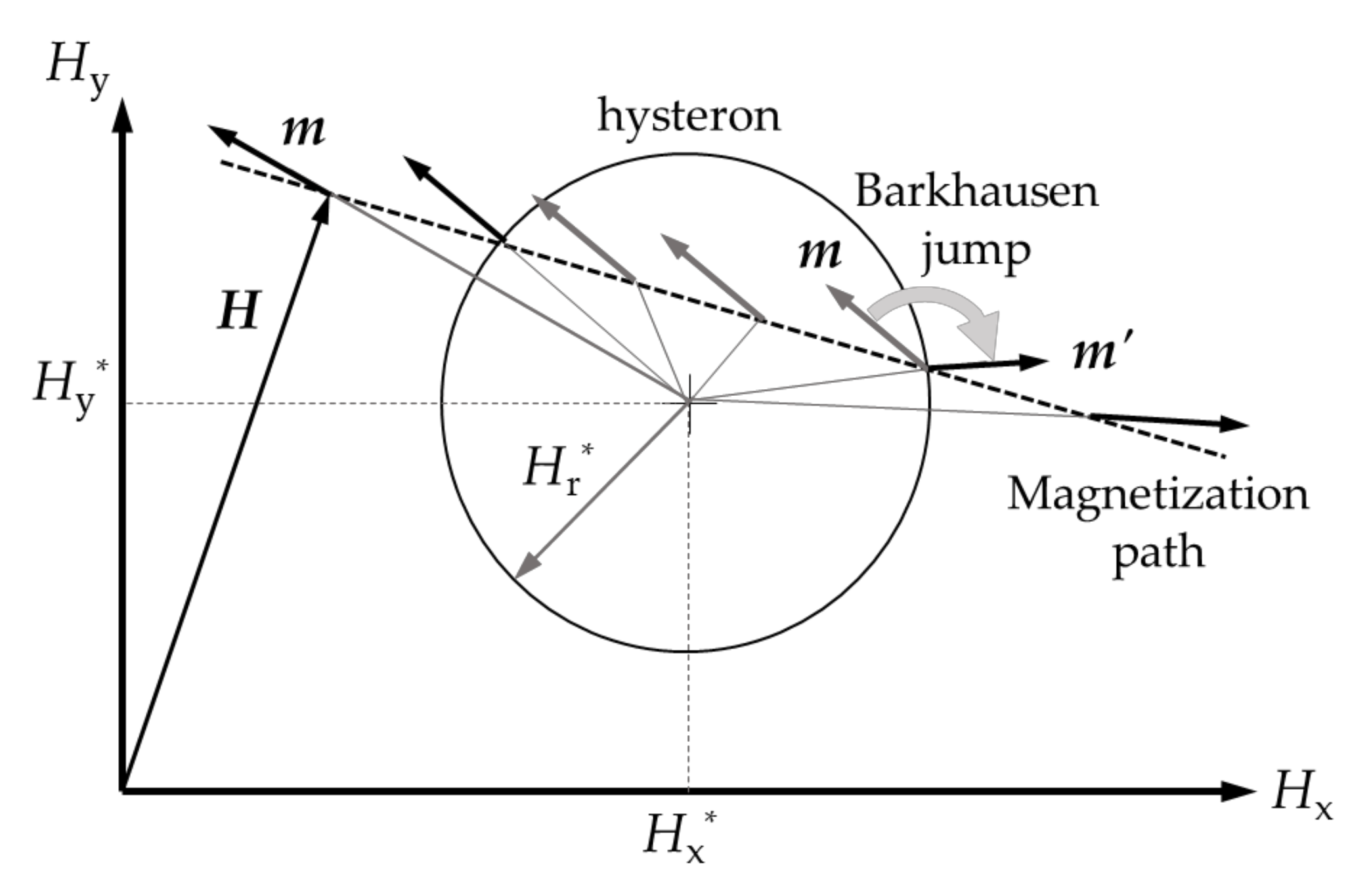
2.2.1. Vector Preisach Hysteresis Model
2.2.2. Modified Magnetization Model for Linear Magnetization Path
3. Results and Discussion
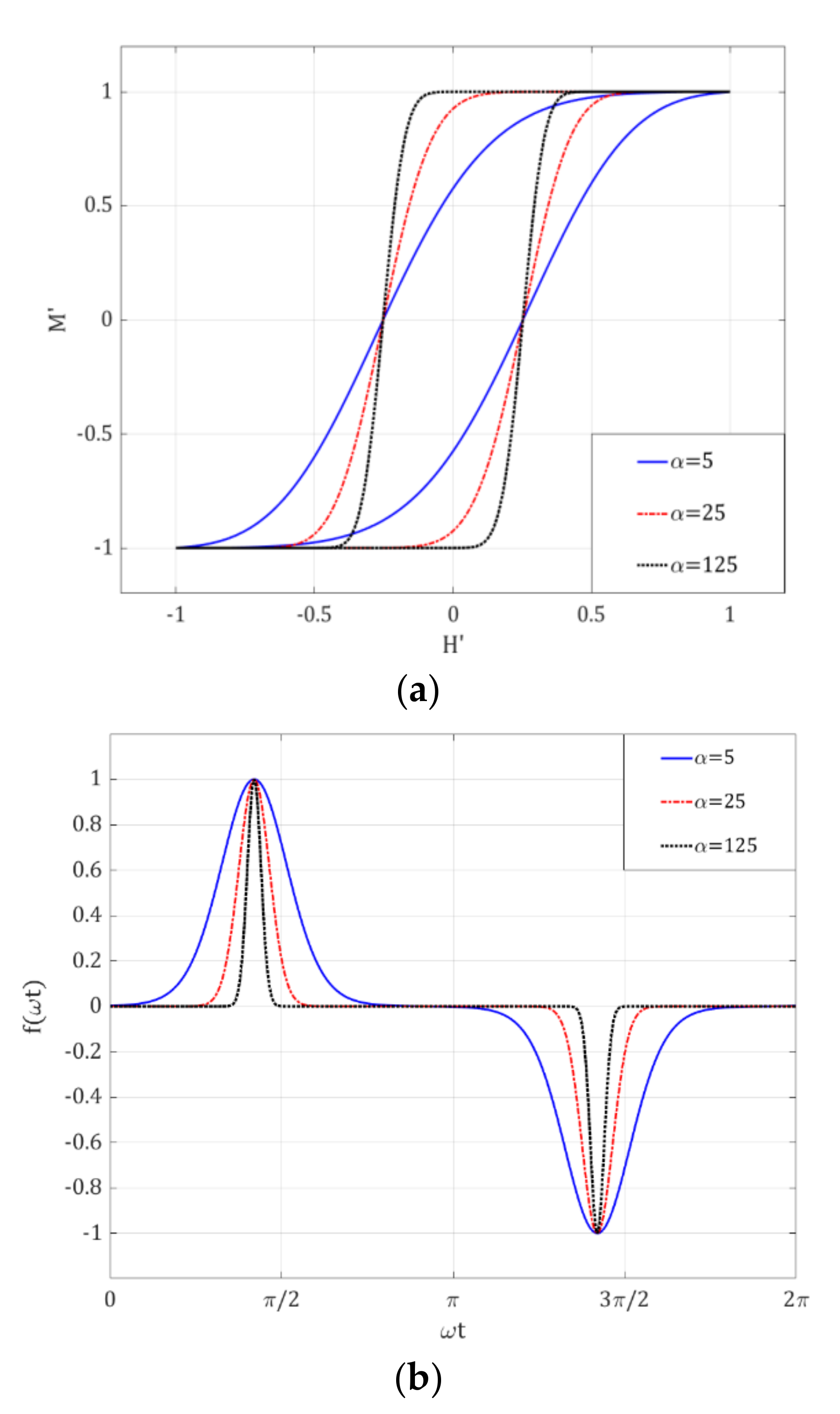
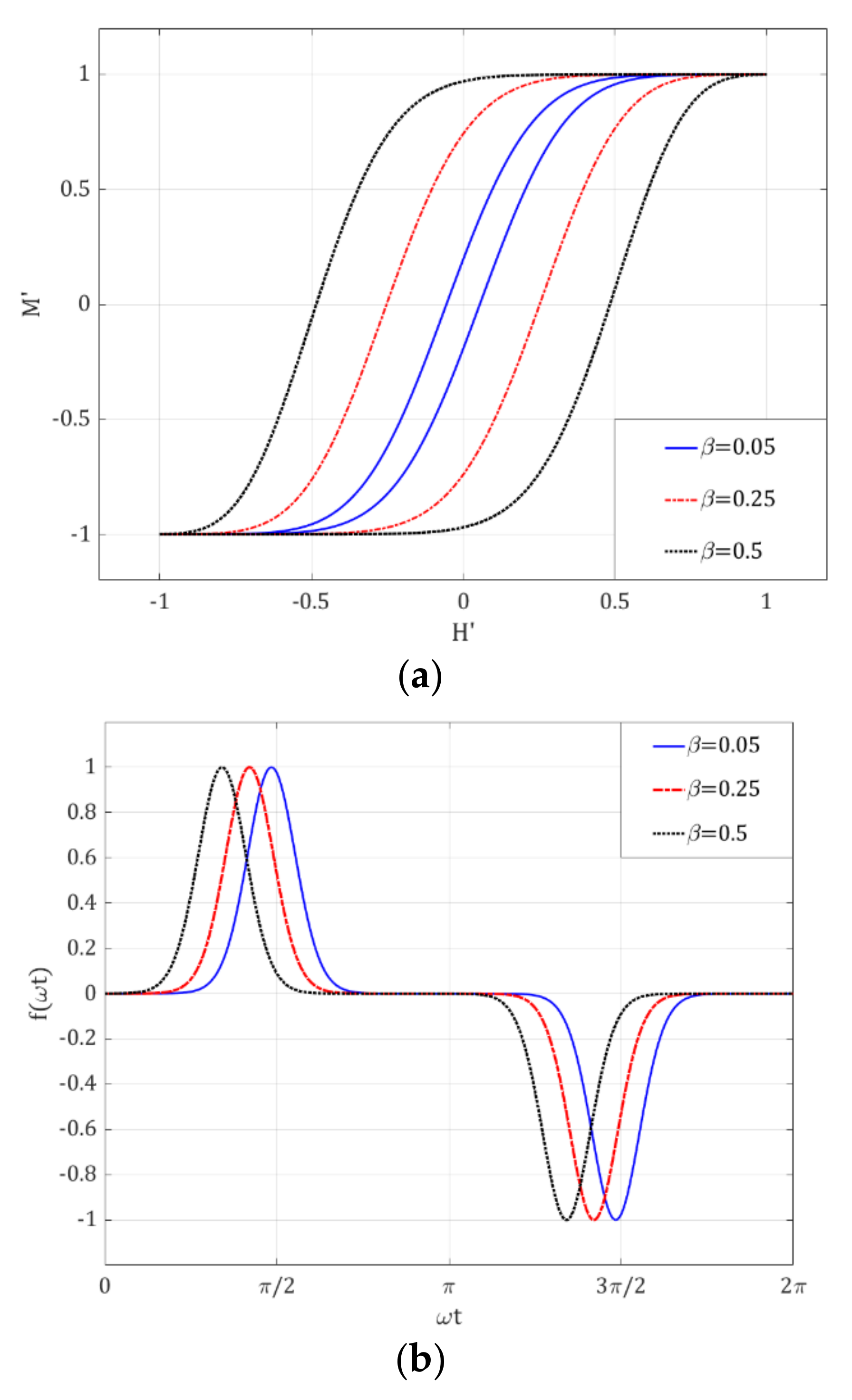
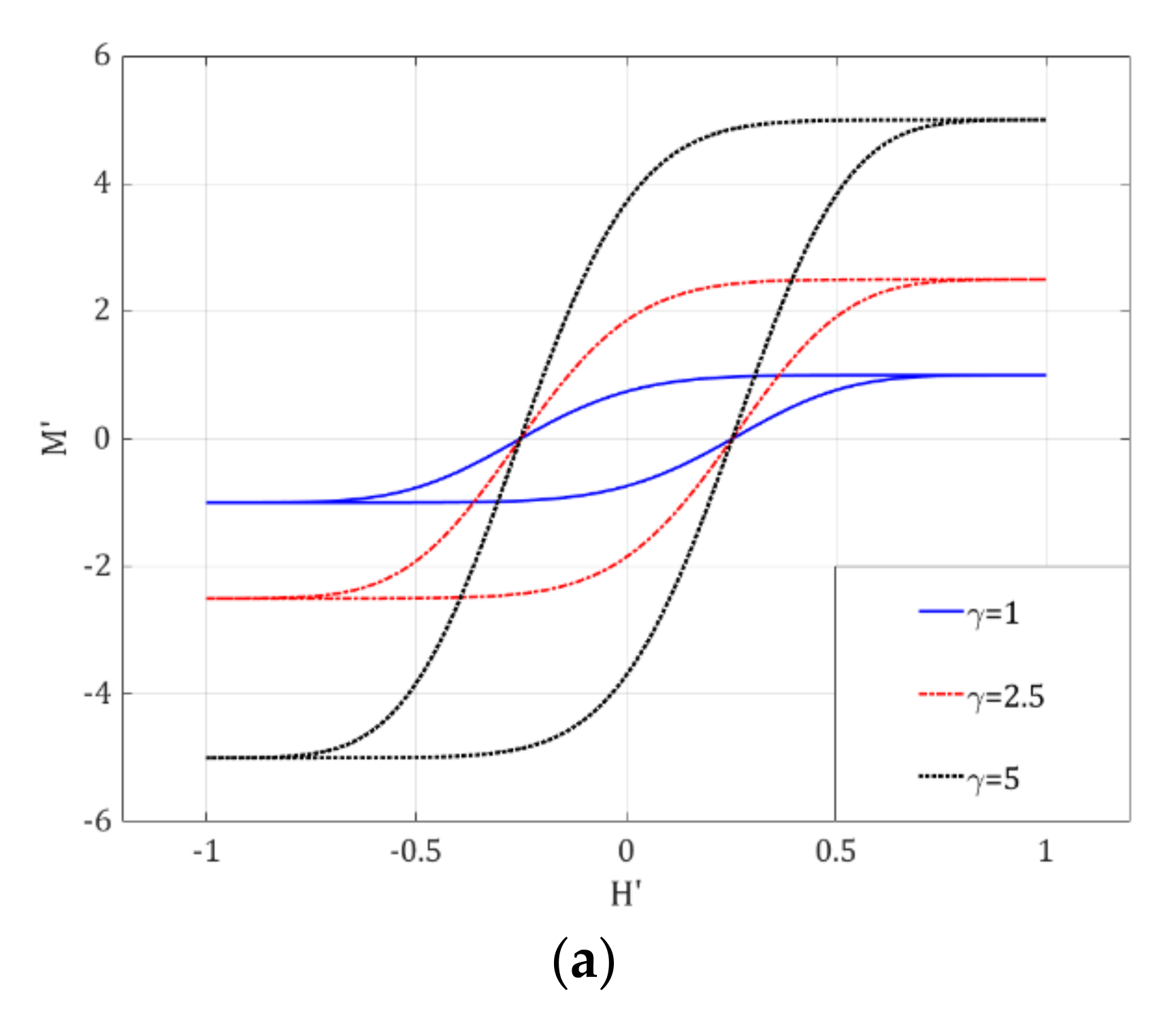
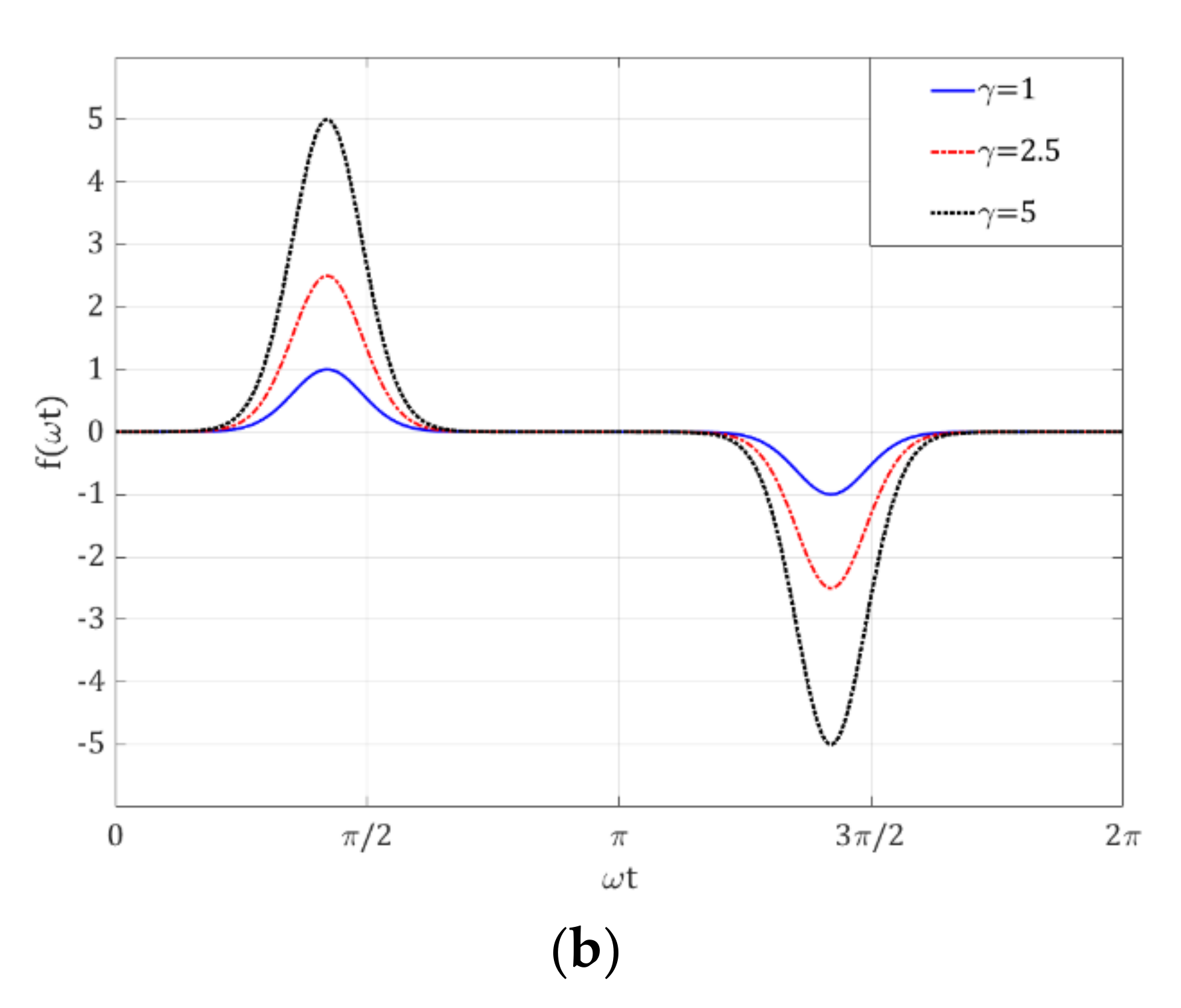
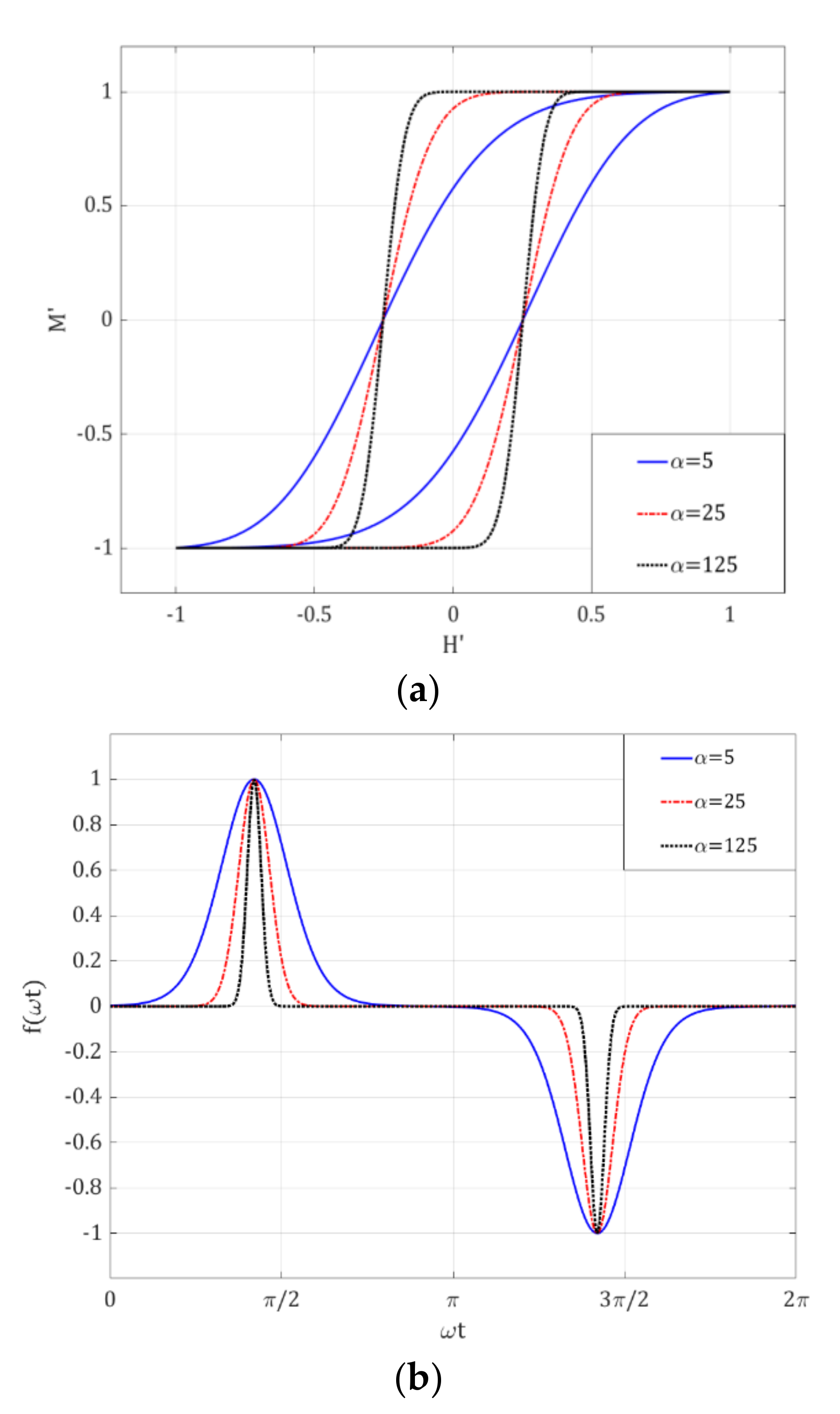
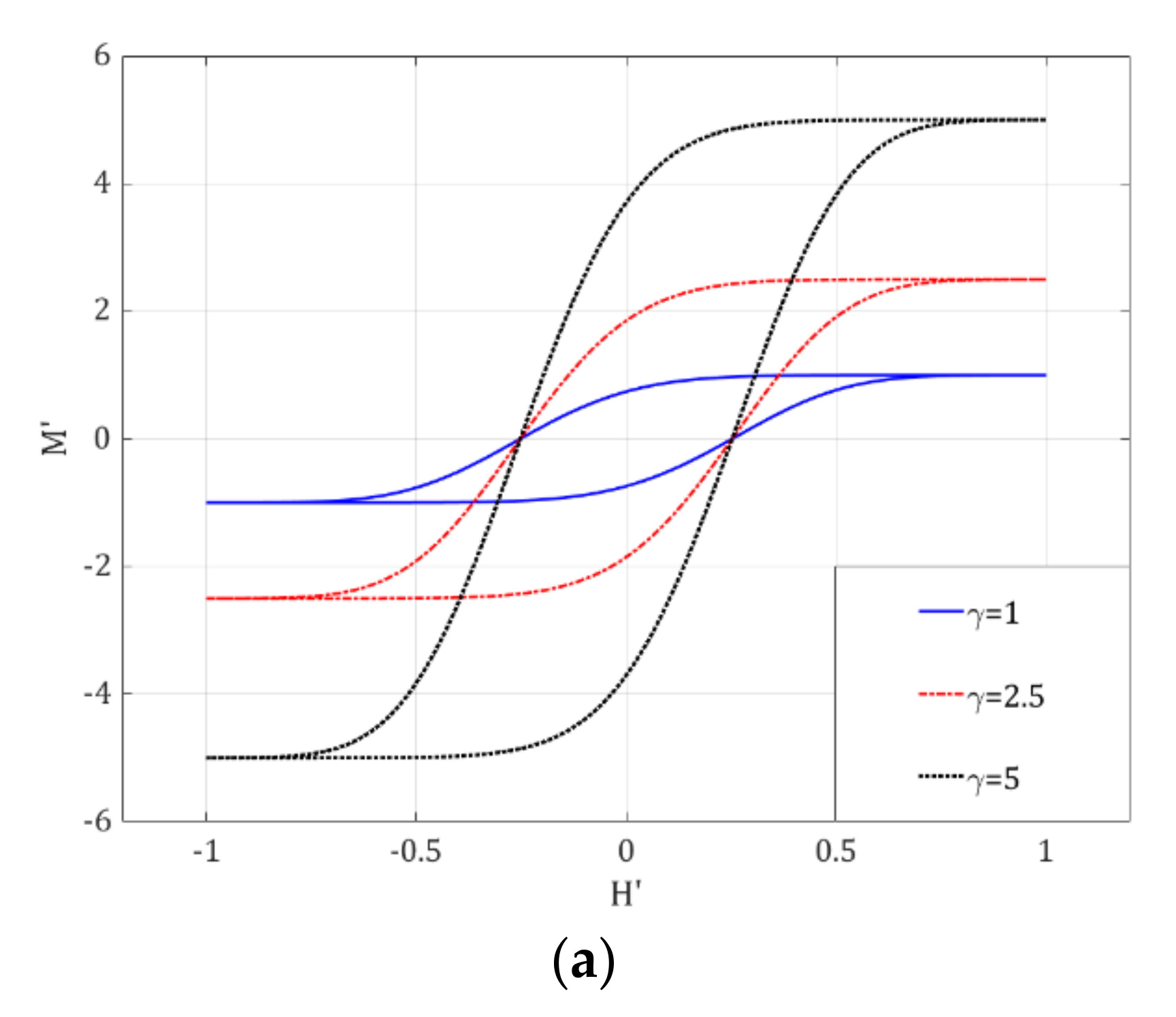
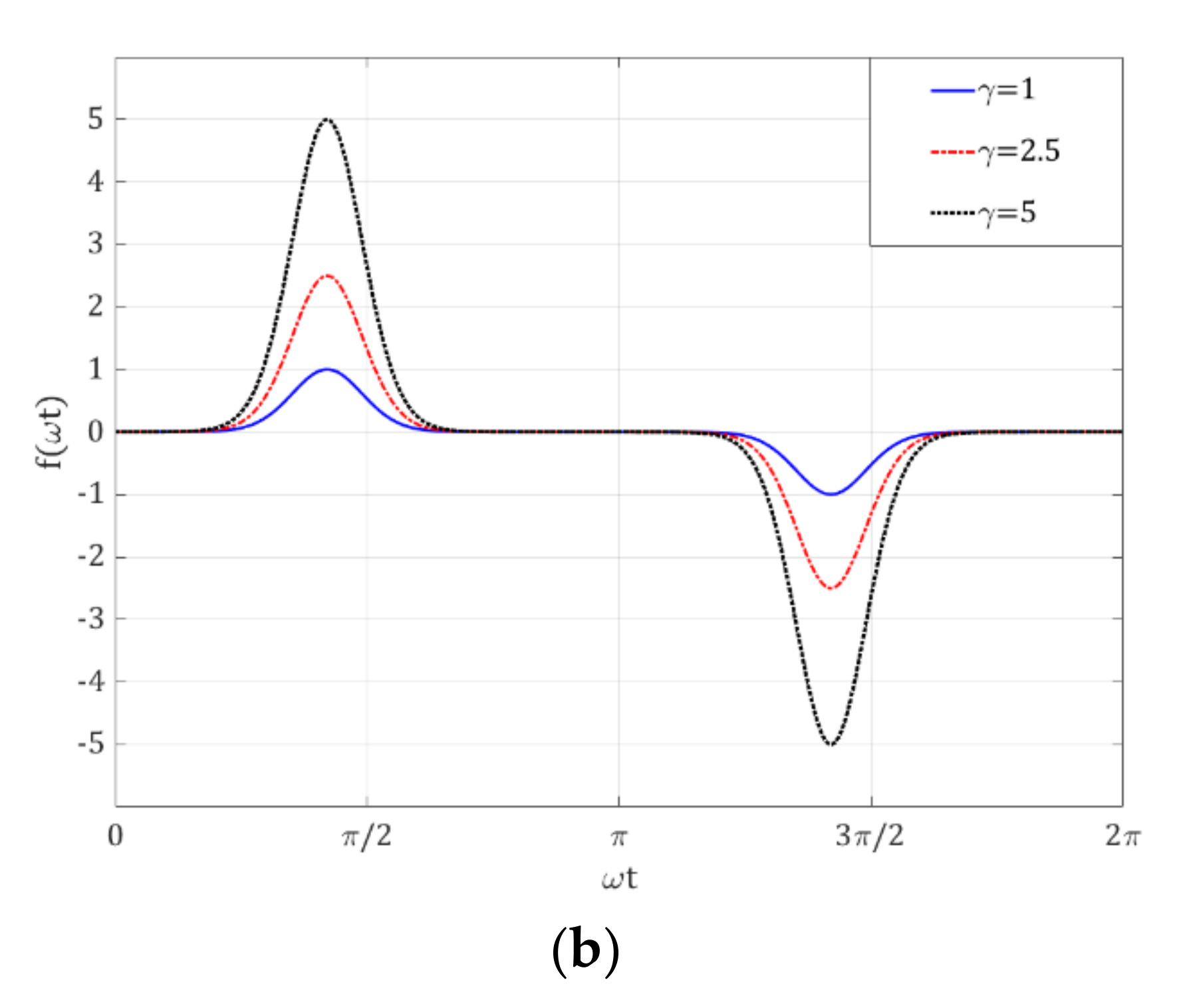
3.1. Sensitivity Analysis
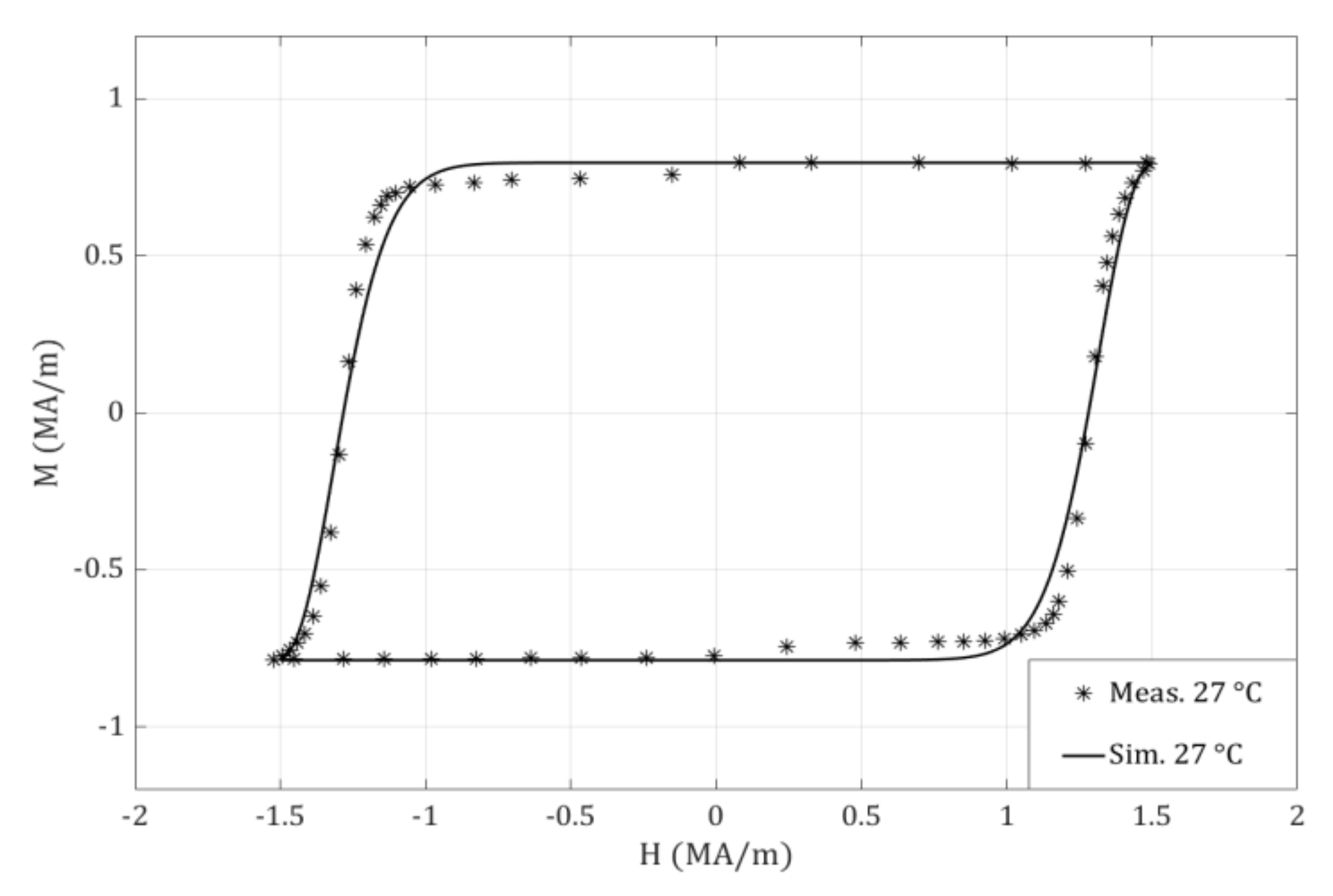
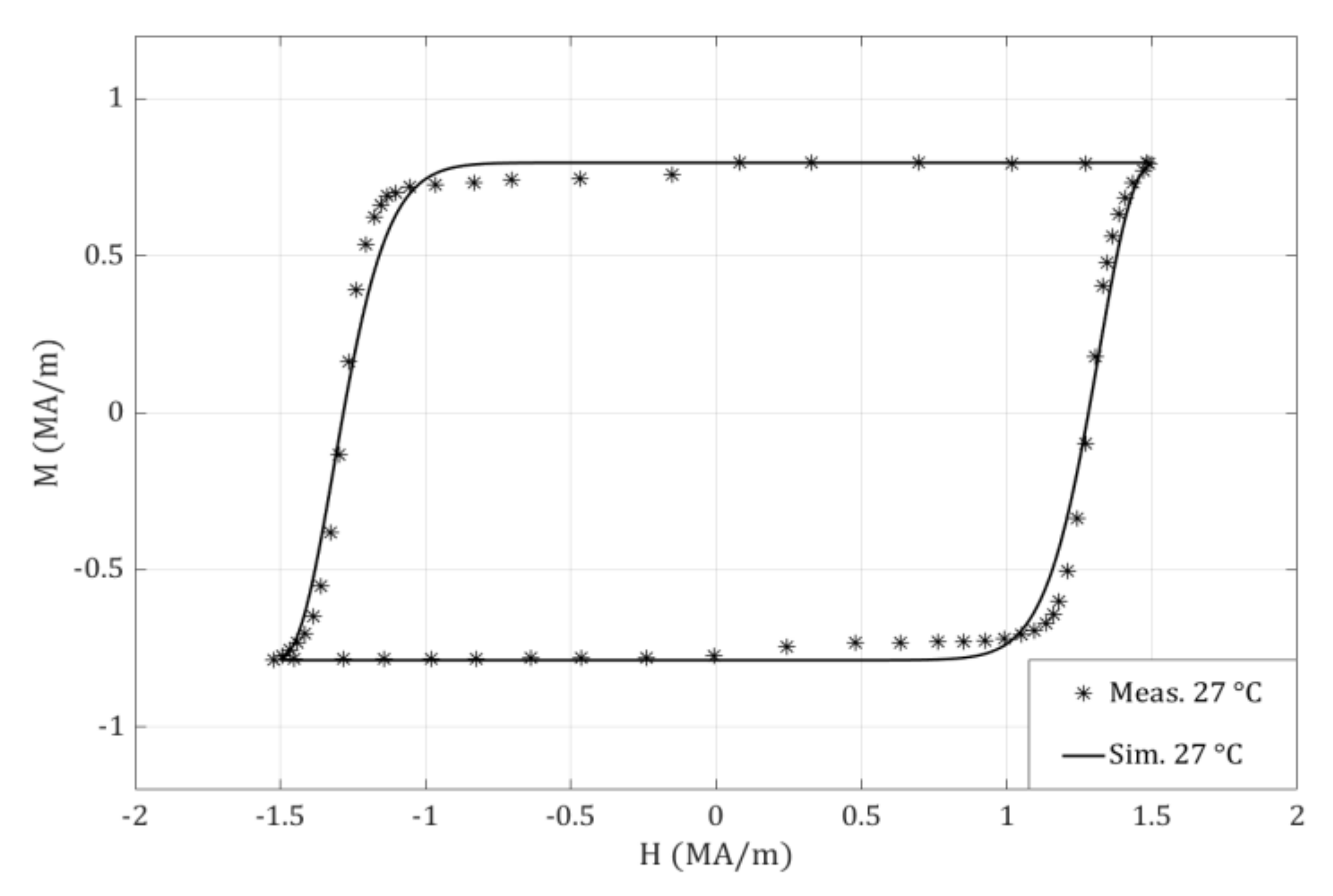
3.2. Hysteresis Loop Modeling
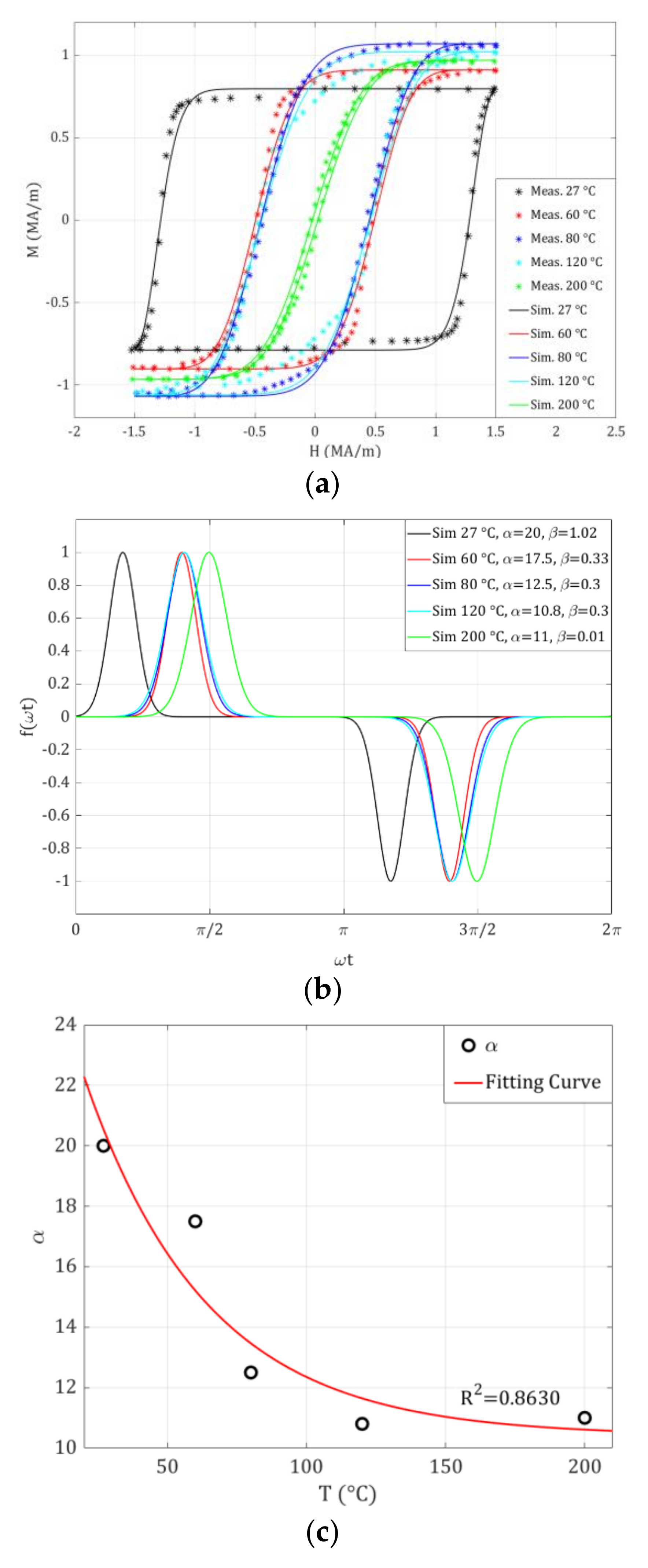
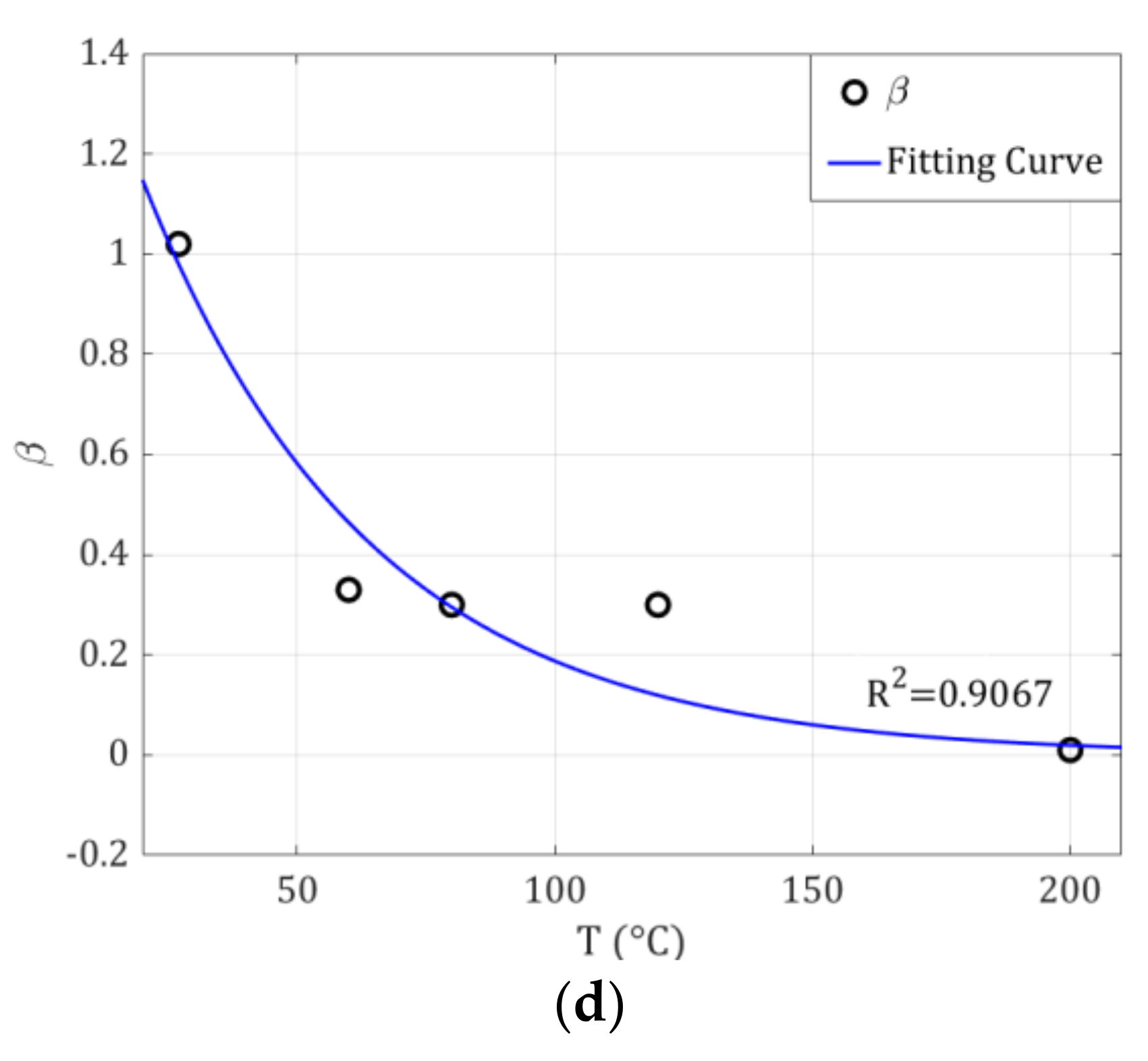
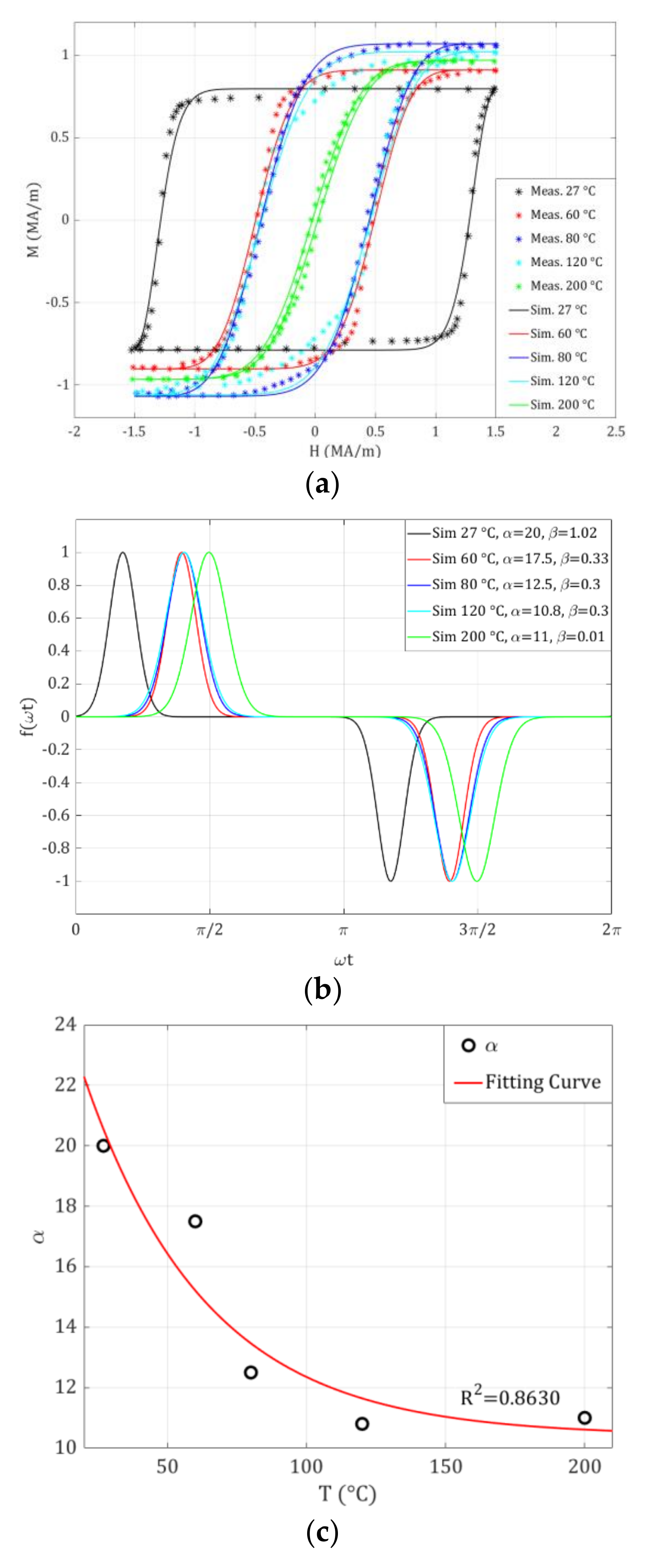
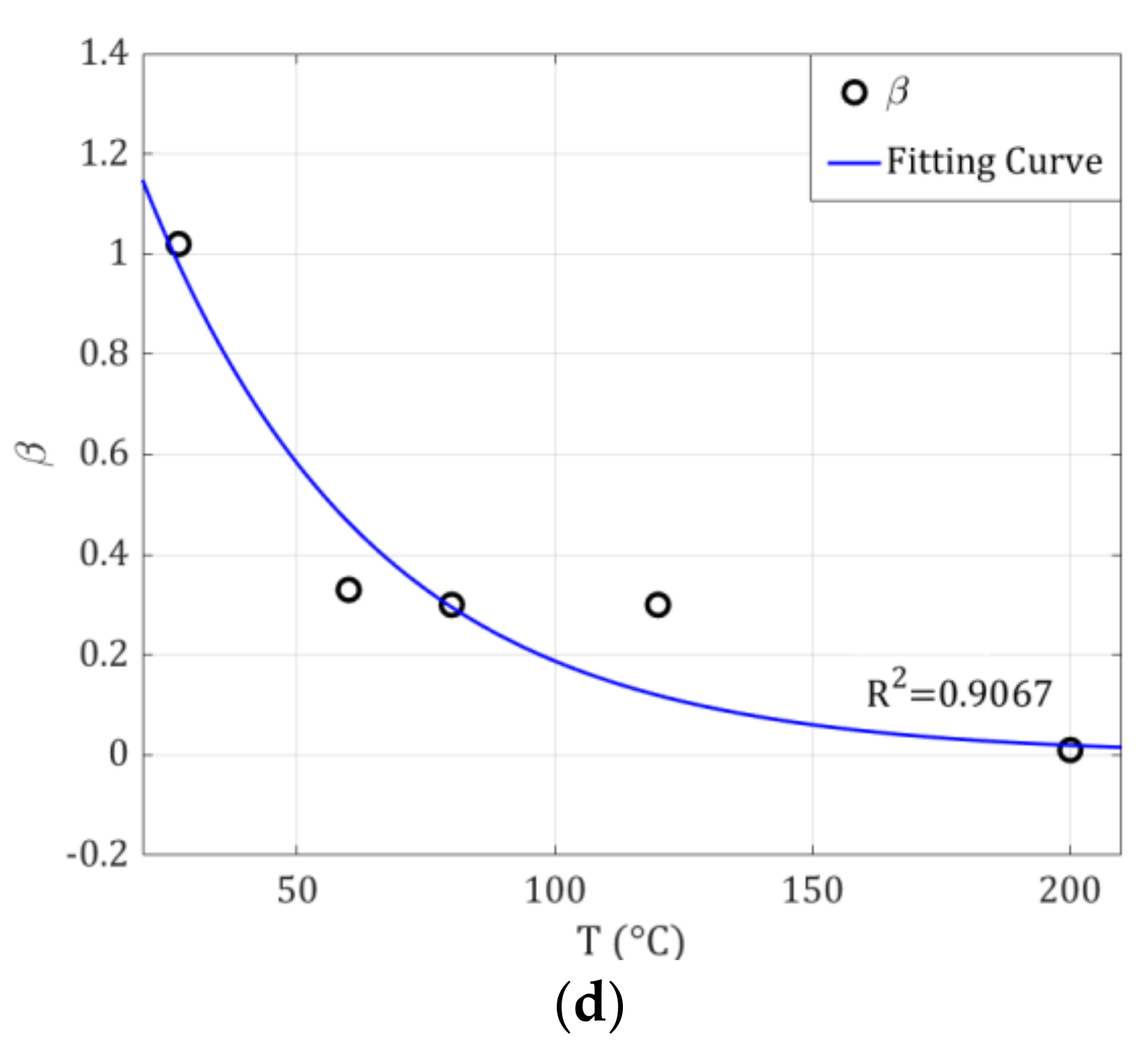
3.3. Temperature Influence on Hysteresis Loop
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bozorth, R.M. Ferromagnetism; IEEE Press: New York, NY, USA, 1993; ISBN 0-7803-1032-2. [Google Scholar]
- Furlani, E.P. Permanent Magnet and Electromechanical Devices: Materials, Analysis and Applications; Series in Electromagnetism; Academic Press: Cambridge, MA, USA, 2001; ISBN 0-12-269951-3. [Google Scholar]
- Lucas, J.; Lucas, P.; Le Mercier, T.; Rollat, A.; Davenport, W.G. Rare Earths: Science, Technology, Production and Use. Elsevier: Amsterdam, The Netherlands, 2014; pp. 224–225. ISBN 978-0444627445. [Google Scholar]
- Mayergoyz, I.D. Mathematical Models of Hysteresis; Springer: New York, NY, USA, 1991. [Google Scholar]
- Ivàny, A. Hysteresis Models in Electromagnetic Computation; Akadémiai Kiadò: Budapest, Hungary, 1997. [Google Scholar]
- Dlala, E. Efficient algorithms for the inclusion of the Preisach hysteresis model in nonlinear finite-element methods. IEEE Trans. Magn. 2011, 47, 395–408. [Google Scholar] [CrossRef]
- Preisach, F. Uber die magnetische nachwirkung. Z. Physic. 1935, 94, 277–302. [Google Scholar]
- Visintin, A. Differential models of hysteresis; Springer: Berlin, Germany, 1994. [Google Scholar]
- Mayergoyz, I.; Friedman, G. Generalized Preisach model of hysteresis. IEEE Trans. Magn. 1988, 24, 212–217. [Google Scholar] [CrossRef]
- Mayergoyz, I. Mathematical Models of Hysteresis and Their Applications; Academic Press: Cambridge, MA, USA, 2003. [Google Scholar]
- Della Torre, E. Magnetic Hysteresis; IEEE Press: Piscataway, NJ, USA, 1999. [Google Scholar]
- Adly, A.; Mayergoyz, I. A new vector Preisach-type model of hysteresis. J. Appl. Phys. 1993, 73, 5824–5826. [Google Scholar] [CrossRef]
- Della Torre, E.; Pinzaglia, E.; Cardelli, E. Vector modeling—Part I: Generalized hysteresis model. Phys. B 2006, 372, 111–114. [Google Scholar] [CrossRef]
- Della Torre, E.; Pinzaglia, E.; Cardelli, E. Vector modeling: Part II, ellipsoidal vector hysteresis model—Numerical application to a 2-D case. Phys. B 2006, 372, 115–119. [Google Scholar] [CrossRef]
- Cardelli, E.; Della Torre, E.; Faba, A. A general vector hysteresis operator: Extension to the 3-D case. IEEE Trans. Magn. 2010, 46, 3990–4000. [Google Scholar] [CrossRef]
- Cardelli, E. A general hysteresis operator for the modeling of vector fields. IEEE Trans. Magn. 2011, 47, 2056–2067. [Google Scholar] [CrossRef]
- Sutor, A.; Kallwies, J.; Lerch, R. An efficient vector Preisach hysteresis model based on a novel rotational operator. J. Appl. Phys. 2012, 111, 07D106. [Google Scholar] [CrossRef] [Green Version]
- Sutor, A.; Shasha, B.; Lerch, R. Validation of the rotational vector Preisach model with measurements and simulations of vectorial minor loops. Appl. Phys. A 2013. [Google Scholar] [CrossRef]
- Cardelli, E.; Faba, A.; Laudani, A.; Quondam, A.S.; Riganti, F.; Salvini, A. A moving approach for the vector hysteron model. Phys. B 2016, 486, 92–96. [Google Scholar] [CrossRef]
- Zhu, L.; Wu, W.; Xu, X.; Guo, Y.; Li, W.; Lu, K.; Koh, C.S. An Improved anisotropic vector Preisach hysteresis model taking account of rotating magnetic fields. IEEE Trans. Magn. 2019, 55, 1–4. [Google Scholar] [CrossRef]
- Jiles, D.; Atherton, D. Theory of ferromagnetic hysteresis. J. Magn. Magn. Mater. 1986, 61, 48–60. [Google Scholar] [CrossRef]
- Philips, D.A.; Dupre, L.R.; Melkebeek, J.A. Comparison of Jiles and Preisach hysteresis models in magnetodynamics. IEEE Trans. Magn. 1995, 31, 3551–3553. [Google Scholar] [CrossRef]
- Stoner, E.C.; Wohlfarth, E.P. A mechanism of magnetic hysteresis in heterogeneous alloys. Philos. Trans. R. Soc. A Math. Phys. Sci. 1948. [Google Scholar] [CrossRef]
- Hodgdon, M.L. Applications of a theory of ferromagnetic hysteresis. IEEE Trans. Magn. 1988, 24, 218–221. [Google Scholar] [CrossRef]
- Osgood, W.F. Mechanics, 1st ed.; MacMillan: London, UK, 1949; p. 272. [Google Scholar]
- Stephenson, R.J. Mechanics and Properties of Matter, 1st ed.; Wiley: New York, NY, USA, 1952; p. 40. [Google Scholar]
- DeGroot, M.H.; Schervish, M.J. Probability and Statistics, 4th ed.; Pearson Education: London, UK, 2012. [Google Scholar]
- Spanier, J.; Oldham, K.B. The Cosine and Sine Integrals. In An Atlas of Functions; Hemisphere: Washington, DC, USA, 1987; pp. 361–372. [Google Scholar]
- Sebastian, T. Temperature effects on torque production and efficiency of PM motors using NdFeB magnets. IEEE Trans. Ind. Appl. 1995, 31, 353–357. [Google Scholar] [CrossRef]
- Ghezelbash, M.; Darbani, S.M.R.; Majd, A.E.; Ghasemi, A. Temperature dependence of magnetic hysteresis loop of NdFeB with uniaxial anisotropy by LIBS technique. J. Supercond. Nov. Magn. 2017, 30, 1893–1898. [Google Scholar] [CrossRef]
- Cullity, B.D.; Graham, C.D. Introduction to Magnetic Materials; Wiley-IEEE: Piscataway, NJ, USA, 2008; ISBN 0-471-47741-9. [Google Scholar]
- Chikazumi, S. Physics of Ferromagnetism, 2nd ed.; Oxford University Press: Oxford, UK, 2009; ISBN 9780199564811. [Google Scholar]
- Cui, J.; Kramer, M.J.; Zhou, L.; Liu, F.; Gabay, A.; Hadjipanayis, G.; Balasubramanian, B.; Sellmyer, D. Current progress and future challenges in rare-earth-free permanent magnets. AMES Lab. Accept. Manuscr. 2018, 215, 118–137. [Google Scholar] [CrossRef]
- Croat, J.J.; Herbst, J.F.; Lee, R.W.; Pinkerton, F.E. Pr-Fe and Nd-Fe-based materials: A new class of high-performance permanent magnets (invited). J. Appl. Phys. 1984, 55, 2078. [Google Scholar] [CrossRef]
- Sagawa, M.; Fujimura, S.; Togawa, N.; Yamamoto, H.; Matsuura, Y. New material for permanent magnets on a base of Nd and Fe (invited). J. Appl. Phys. 1984, 55, 2083. [Google Scholar] [CrossRef]
- Gutfleisch, O. Controlling the properties of high density permanent magnetic materials. J. Phys. D 2000, 33, R157–R172. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
D’Aloia, A.G.; Francesco, A.D.; Santis, V.D. A Novel Computational Method to Identify/Analyze Hysteresis Loops of Hard Magnetic Materials. Magnetochemistry 2021, 7, 10. https://doi.org/10.3390/magnetochemistry7010010
D’Aloia AG, Francesco AD, Santis VD. A Novel Computational Method to Identify/Analyze Hysteresis Loops of Hard Magnetic Materials. Magnetochemistry. 2021; 7(1):10. https://doi.org/10.3390/magnetochemistry7010010
Chicago/Turabian StyleD’Aloia, Alessandro Giuseppe, Antonio Di Francesco, and Valerio De Santis. 2021. "A Novel Computational Method to Identify/Analyze Hysteresis Loops of Hard Magnetic Materials" Magnetochemistry 7, no. 1: 10. https://doi.org/10.3390/magnetochemistry7010010
APA StyleD’Aloia, A. G., Francesco, A. D., & Santis, V. D. (2021). A Novel Computational Method to Identify/Analyze Hysteresis Loops of Hard Magnetic Materials. Magnetochemistry, 7(1), 10. https://doi.org/10.3390/magnetochemistry7010010