
Comparative Analysis of Color Space and Channel, Detector, and Descriptor for Feature-Based Image Registration


Abstract
:1. Introduction
2. Materials and Methods
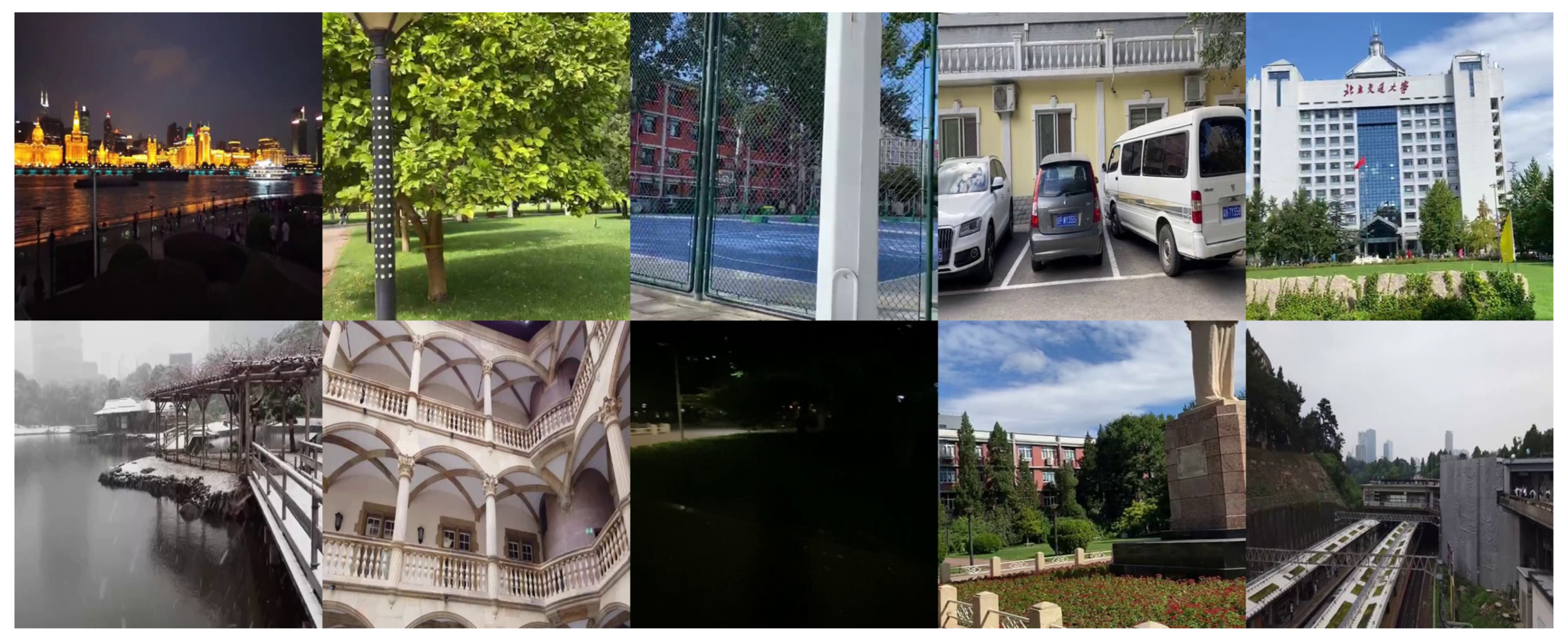
2.1. Dataset
2.2. Selected Color Spaces and Channels
2.3. Selected Detectors and Descriptors
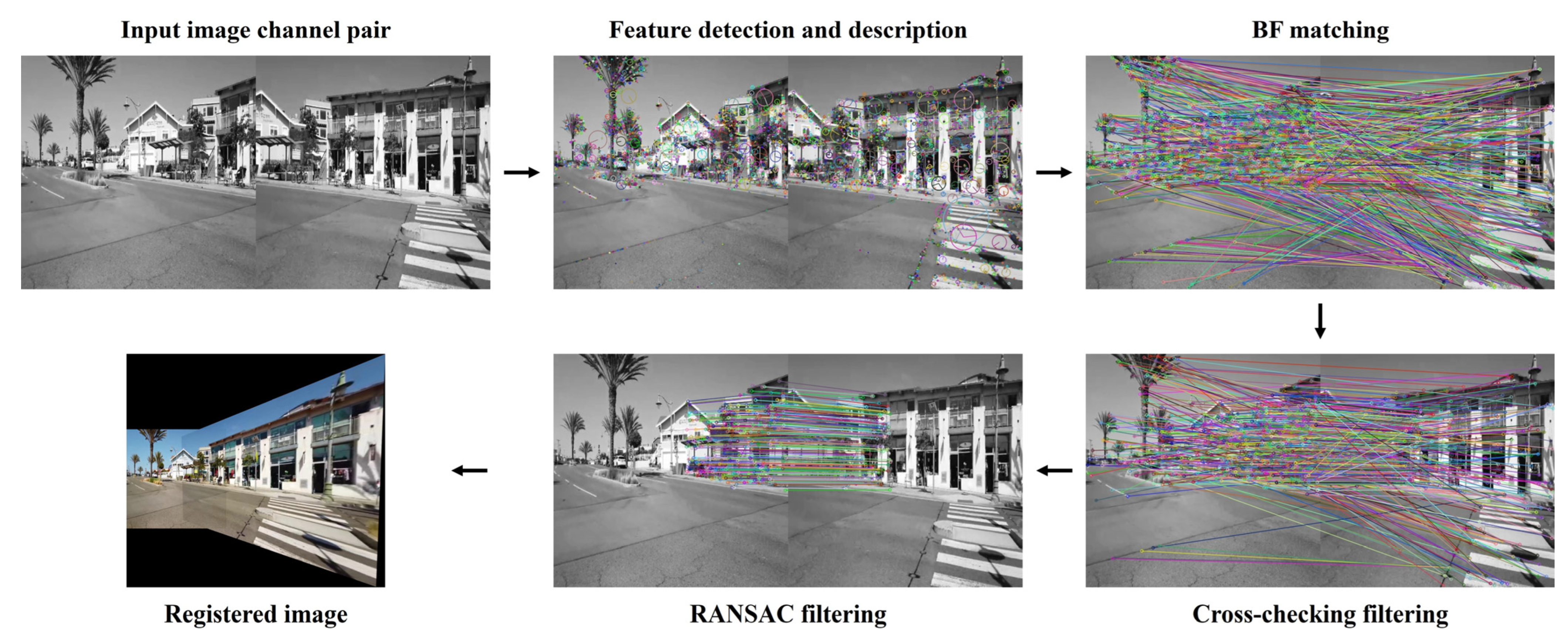
2.4. Image Registration Procedure
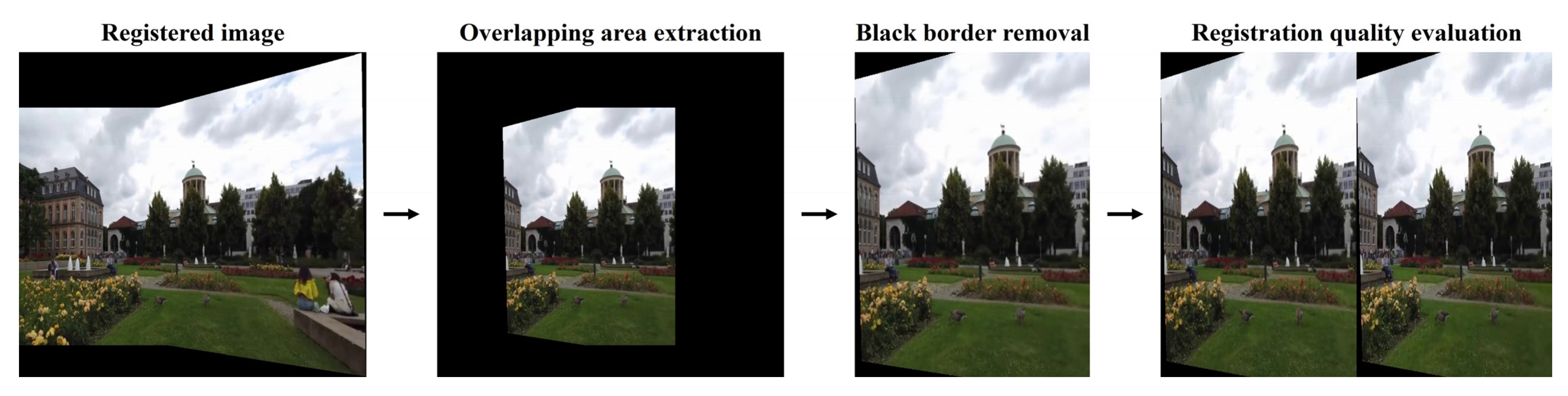
2.5. Registration Quality Evaluation
- Where F is the number of inlier matched features after RANSAC homography estimation, (xi, yi) are the coordinates of the ith feature in registered target image, and (xi′, yi′) are the coordinates of the ith feature in registered source image. RE ranges from 0 to positive infinity.
- Where P is the number of pixels in the overlapping area between registered target and source images excluding black background pixels, W is the overlapping area width, H is the overlapping area height, (x, y) are the overlapping area pixel coordinates, (Rx,y, Gx,y, Bx,y) are the R, G, B values at pixel location (x, y) in registered target image, and (Rx,y′, Gx,y′, Bx,y′) are the R, G, B values at pixel location (x, y) in registered source image. RMSE ranges from 0 to 255 for typical 24-bit images.
- Where N is the number of image patches where local SSIM is calculated within a 7 × 7 sliding window, μi is the mean of the ith patch in registered grayscale target image, μi′ is the mean of the ith patch in registered grayscale source image, σc is the covariance of registered grayscale target and source images, σi is the variance of the ith patch in registered grayscale target image, and σi′ is the variance of the ith patch in registered grayscale source image. SSIM ranges from −1 to 1. All SSIM values were calculated using scikit-image [71] version 0.20.0 with default function argument values.
3. Results and Discussion
3.1. Registration Quality Comparison
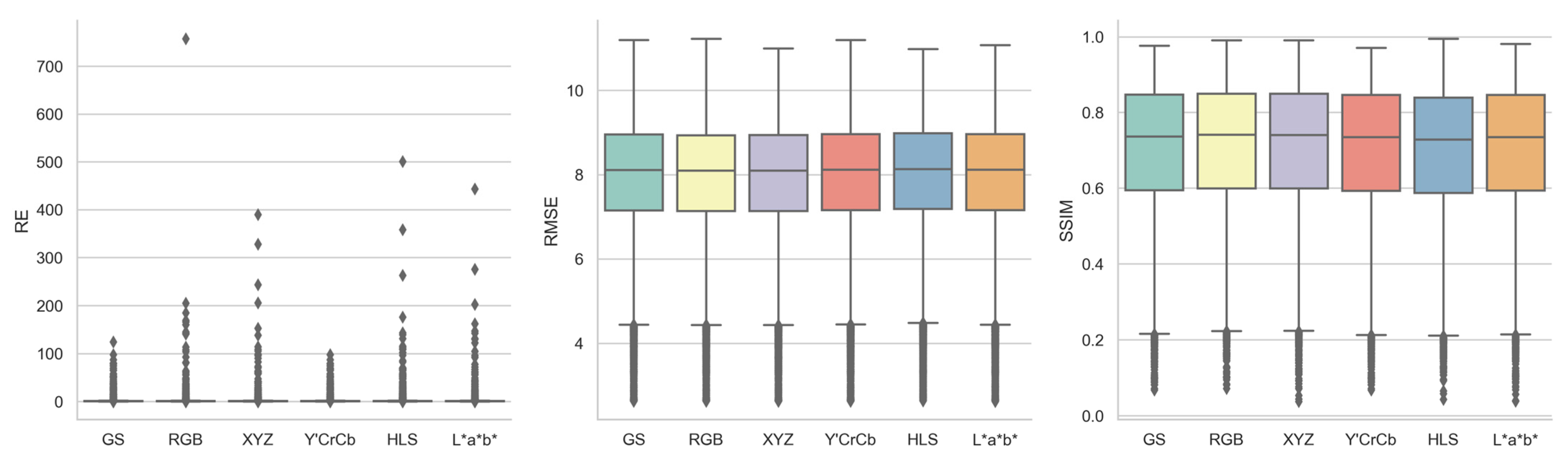
3.1.1. Color Space
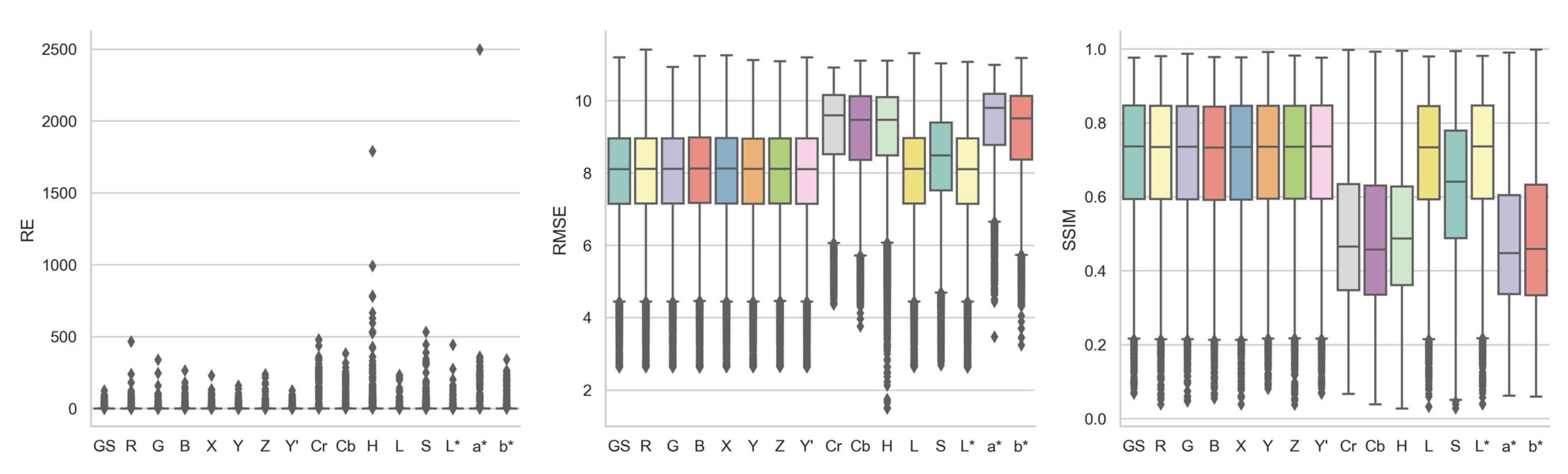
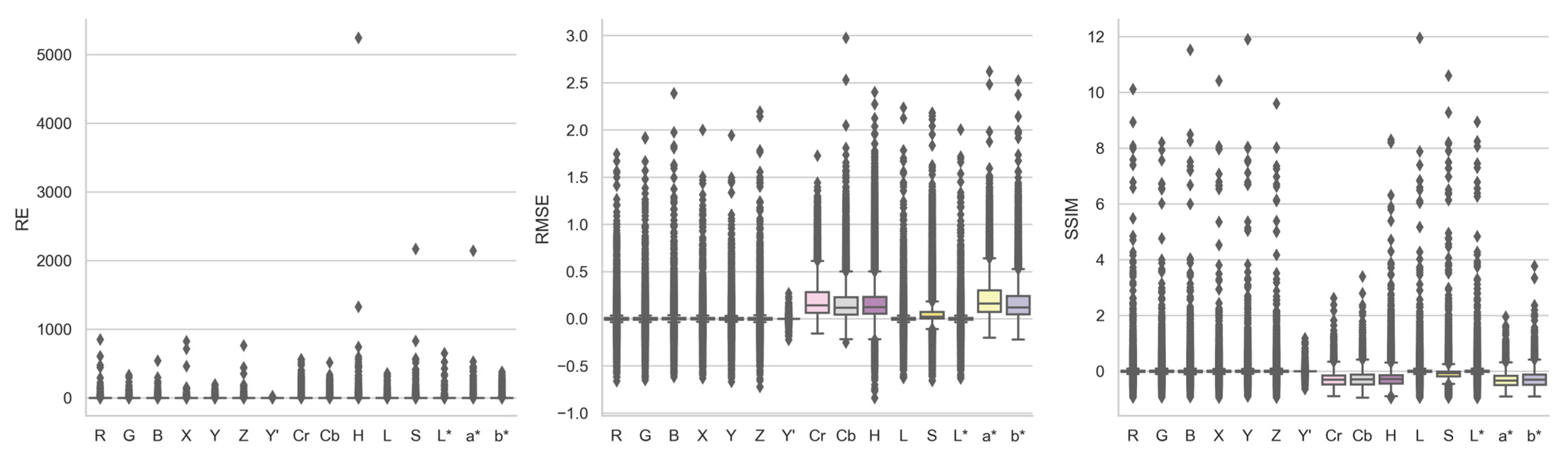
3.1.2. Color Channel
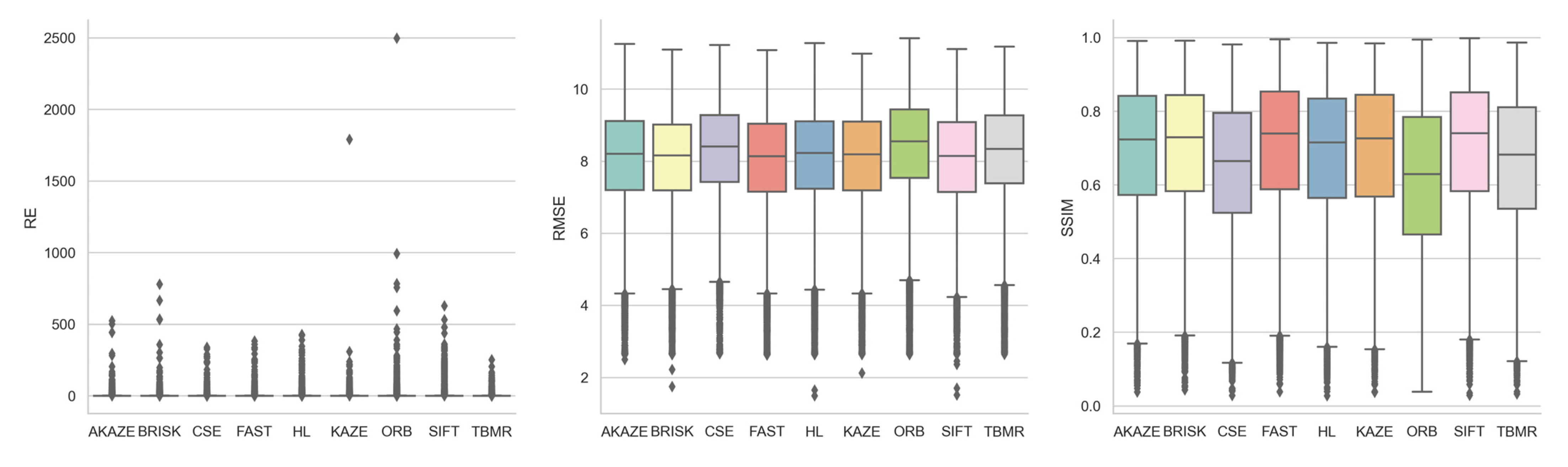
3.1.3. Feature Detector
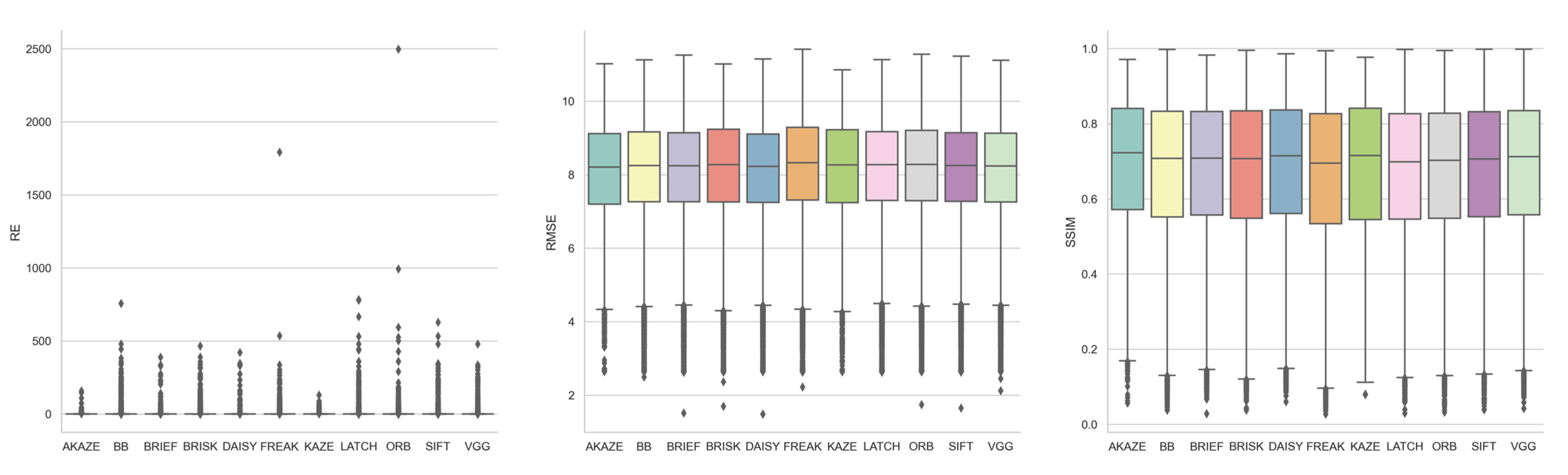
3.1.4. Feature Descriptor
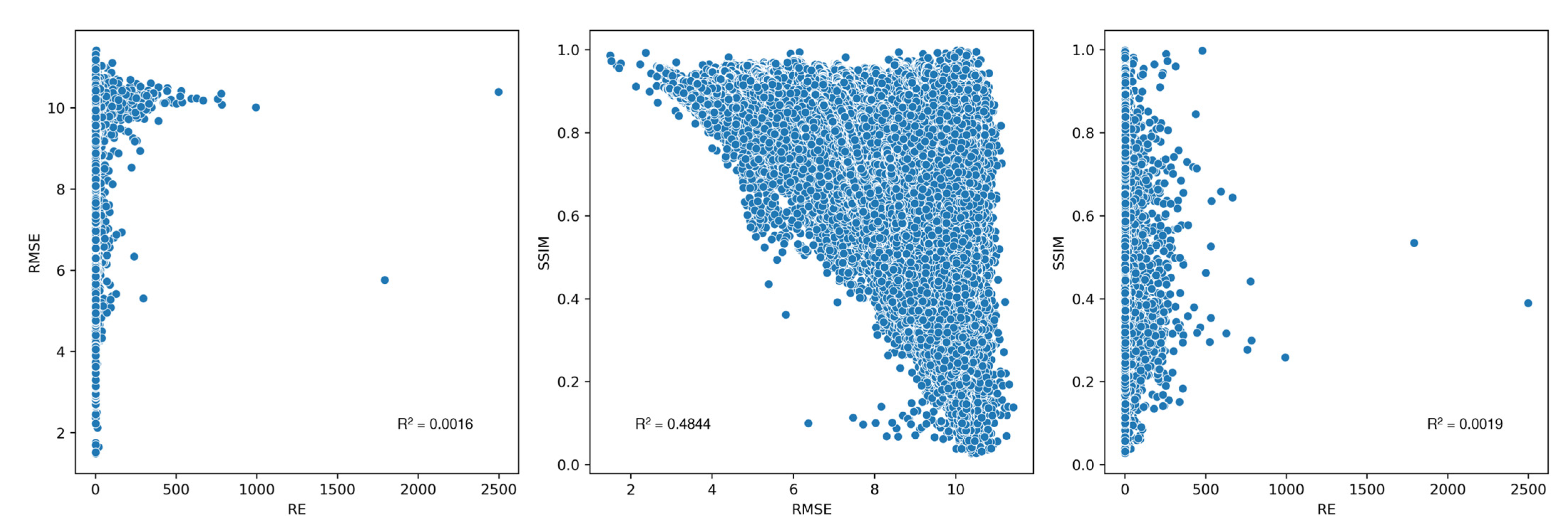
3.2. Registration Quality Metric Agreement
3.3. Registration Failure Rate
3.4. Feature Number
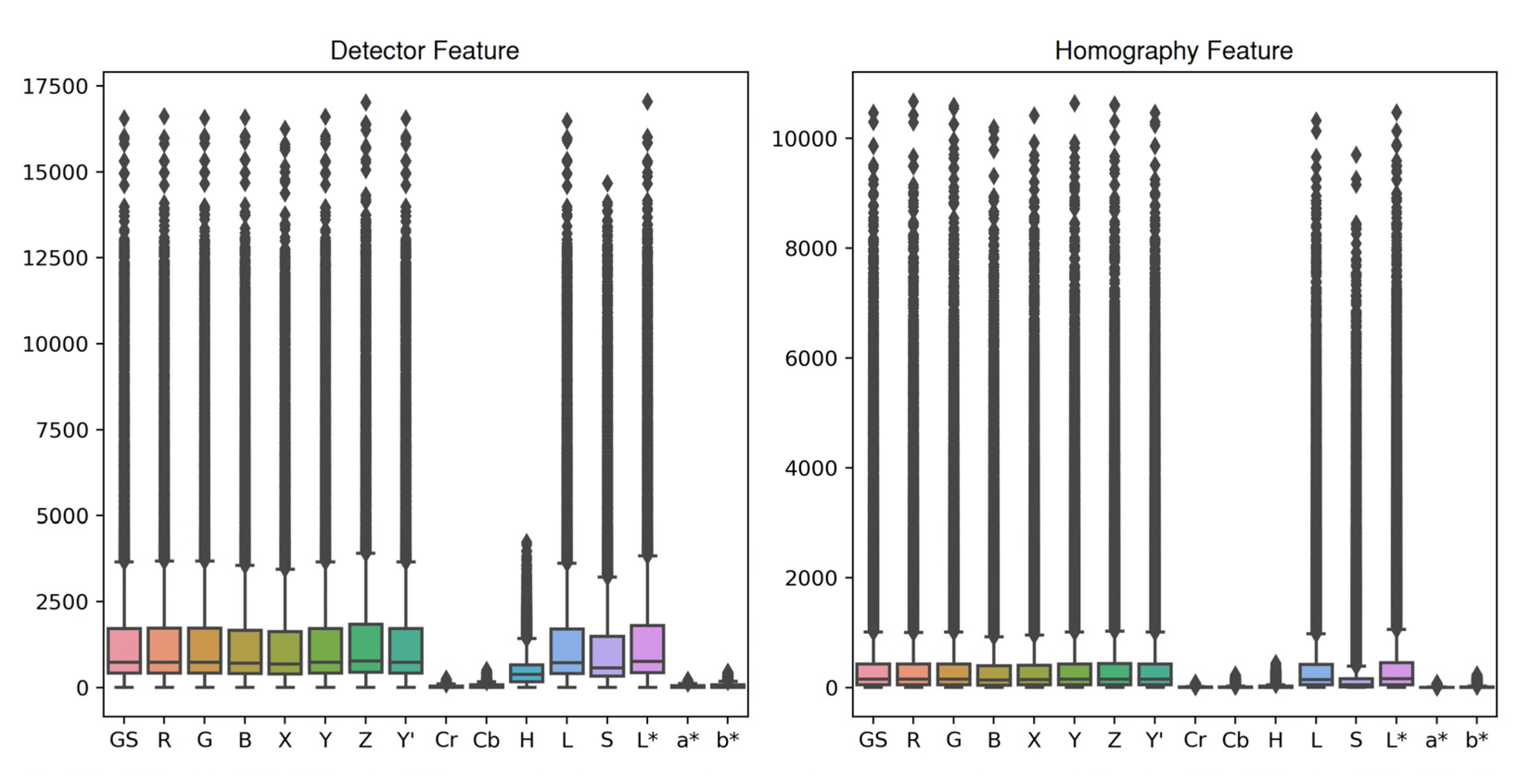
3.4.1. Color Channel
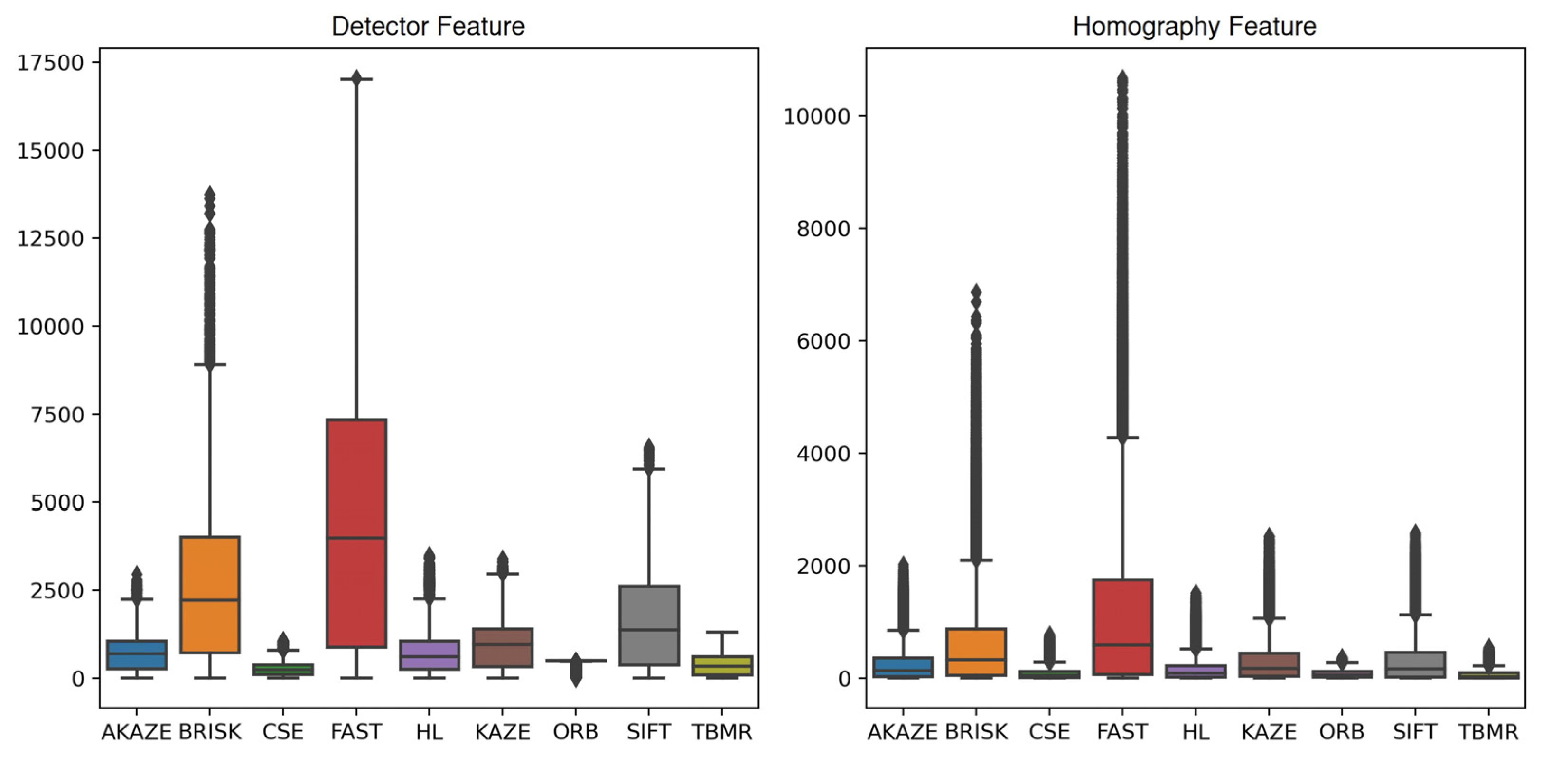
3.4.2. Feature Detector
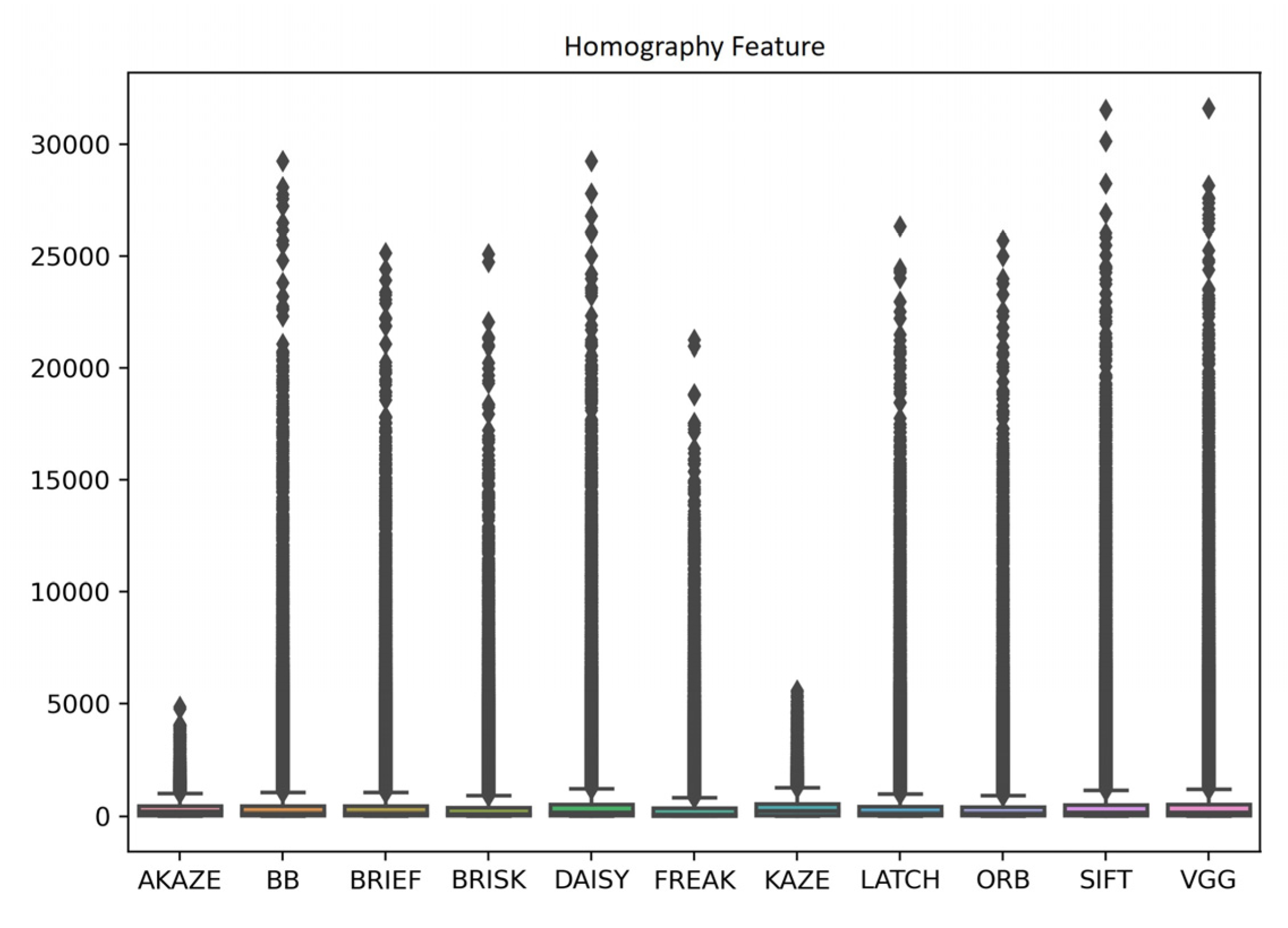
3.4.3. Feature Descriptor
3.5. Best Color Space or Channel, Detector, and Descriptor Combination
- Lowest RE combinationsFor color space, XYZ+KAZE+BRISK ranked at 2nd place, with an RE of 0.86, an RMSE of 7.85 at 102nd place, and an SSIM of 0.73 at 102nd place. For color channel, L+KAZE+BRISK ranked at 1st place, with an RE of 0.86, an RMSE of 7.88 at 166th place, and an SSIM of 0.73 at 153rd place.
- Lowest RMSE combinationsFor color space, RGB+SIFT+VGG ranked at 1st place, with an RMSE of 7.80, an RE of 0.90 at 21st place, and an SSIM of 0.74 at 4th place. For color channel, Y′+FAST+VGG, which should be equivalent to grayscale+FAST+VGG, ranked at 7th place, with an RMSE of 7.81, an RE of 1.15 at 181st place, and an SSIM of 0.74 at 6th place.
- Highest SSIM combinationsFor color space, XYZ+SIFT+SIFT ranked at 1st place, with an SSIM of 0.75, an RE of 0.90 at 18th place, and an RMSE of 7.80 at 2nd place. For color channel, G+FAST+VGG ranked at 5th place, with an SSIM of 0.74, an RE of 1.15 at 184th place, and an RMSE of 7.81 at 12th place.
- Most detector feature combinationsFor color channel, Z+FAST+VGG ranked at 39th place, with a detector feature number of 11,642, and a homography feature number of 1960 at 21st place.
- Most homography feature combinationsFor color channel, Z+FAST+VGG ranked at 21st place, with a homography feature number of 1960, and a detector feature number of 11,642 at 39th place, as mentioned above.
4. Conclusions
5. Feature Acronym
- AGAST: adaptive and generic accelerated segment test
- AKAZE: accelerated-KAZE
- ASIFT: affine-SIFT
- BB: BinBoost
- BEBLID: boosted efficient binary local image descriptor
- BRIEF: binary robust independent elementary features
- BRISK: binary robust invariant scalable keypoints
- CSE: center surround extremas
- CSIFT: colored SIFT
- CURVE: local feature of retinal vessels
- FAST: features from accelerated segment test
- FREAK: fast retina keypoint
- GFTT: good features to track
- GOFRO: Gabor odd filter ratio-based operator
- GSIFT: global context SIFT
- HC: Harris corner
- HL: Harris–Laplace
- HOG: histograms of oriented gradient
- LATCH: learned arrangements of three patch codes
- LUCID: locally uniform comparison image descriptor
- MSD: maximal self-dissimilarities
- MSER: maximally stable extremal regions
- ORB: oriented FAST and rotated BRIEF
- PCA-SIFT: principal components analysis-SIFT
- PCT: position–color–texture
- SIFT: scale invariant feature transform
- SQFD: signature quadratic form distance
- SURF: speeded up robust features
- TBMR: tree-based Morse regions
- TEBLID: triplet-based efficient binary local image descriptor
- VGG: Visual Geometry Group
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Detector | Feature Descriptor |
|---|---|
| BRISK | AKAZE |
| BRISK | KAZE |
| CSE | AKAZE |
| CSE | KAZE |
| FAST | AKAZE |
| FAST | KAZE |
| HL | AKAZE |
| HL | KAZE |
| ORB | AKAZE |
| ORB | KAZE |
| SIFT | AKAZE |
| SIFT | KAZE |
| SIFT | ORB |
| TBMR | AKAZE |
| TBMR | KAZE |
| Color Space | RE | RMSE | SSIM | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | |
| GS | 0 | 0.8024 | 1.0005 | 1.2121 | 124.2114 | 2.6329 | 7.1536 | 8.1125 | 8.9581 | 11.2000 | 0.0679 | 0.5946 | 0.7363 | 0.8472 | 0.9767 |
| RGB | 5.80 × 10−14 | 0.8328 | 1.0282 | 1.2357 | 757.4403 | 2.6369 | 7.1372 | 8.0981 | 8.9335 | 11.2248 | 0.0721 | 0.5993 | 0.7410 | 0.8500 | 0.9905 |
| XYZ | 2.99 × 10−14 | 0.8229 | 1.0196 | 1.2288 | 389.9551 | 2.6332 | 7.1390 | 8.0936 | 8.9411 | 10.9971 | 0.0374 | 0.5994 | 0.7409 | 0.8500 | 0.9910 |
| Y′CrCb | 2.94 × 10−14 | 0.8055 | 1.0081 | 1.2200 | 97.7295 | 2.6329 | 7.1598 | 8.1190 | 8.9635 | 11.2000 | 0.0679 | 0.5932 | 0.7349 | 0.8466 | 0.9707 |
| HLS | 3.08 × 10−14 | 0.9268 | 1.1179 | 1.3088 | 500.9235 | 2.6434 | 7.1856 | 8.1360 | 8.9832 | 10.9812 | 0.0428 | 0.5878 | 0.7287 | 0.8392 | 0.9948 |
| L*a*b* | 2.89 × 10−14 | 0.8104 | 1.0132 | 1.2254 | 443.2364 | 2.6271 | 7.1579 | 8.1195 | 8.9659 | 11.0763 | 0.0387 | 0.5935 | 0.7354 | 0.8465 | 0.9814 |
| Color Space | RE | RMSE | SSIM | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | |
| RGB | −1 | −0.0312 | 0.0197 | 0.0822 | 5011.3504 | −0.6645 | −0.0098 | −0.0005 | 0.0071 | 1.3114 | −0.8751 | −0.0189 | 0.0010 | 0.0268 | 11.5030 |
| XYZ | −1 | −0.0360 | 0.0135 | 0.0714 | 2071.0455 | −0.7286 | −0.0096 | −0.0005 | 0.0069 | 1.4980 | −0.9434 | −0.0181 | 0.0010 | 0.0262 | 12.3977 |
| Y′CrCb | −1 | −7.25 × 10−7 | 7.01 × 10−8 | 2.84 × 10−6 | 93.4272 | −0.3746 | −5.14 × 10−11 | 0 | 5.28 × 10−11 | 1.0278 | −0.7606 | −5.84 × 10−10 | 0 | 5.64 × 10−10 | 2.5220 |
| HLS | −1 | 0.0209 | 0.1057 | 0.2198 | 1610.0101 | −0.6761 | −0.0083 | 0.0009 | 0.0134 | 1.6110 | −0.8839 | −0.0359 | −0.0025 | 0.0218 | 10.6199 |
| L*a*b* | −1 | −0.0451 | 0.0106 | 0.0717 | 648.5143 | −0.6329 | −0.0085 | 1.14 × 10−5 | 0.0087 | 2.5251 | −0.9523 | −0.0235 | −2.36 × 10−5 | 0.0234 | 8.9460 |
| Color Channel | RE | RMSE | SSIM | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | |
| GS | 0 | 0.8024 | 1.0005 | 1.2121 | 124.2114 | 2.6329 | 7.1536 | 8.1125 | 8.9581 | 11.2000 | 0.0679 | 0.5946 | 0.7363 | 0.8472 | 0.9767 |
| R | 0 | 0.8142 | 1.0112 | 1.2181 | 466.5051 | 2.6300 | 7.1577 | 8.1187 | 8.9625 | 11.4128 | 0.0391 | 0.5939 | 0.7350 | 0.8467 | 0.9808 |
| G | 0 | 0.8059 | 1.0024 | 1.2144 | 339.3203 | 2.6346 | 7.1558 | 8.1172 | 8.9629 | 10.9353 | 0.0473 | 0.5935 | 0.7355 | 0.8461 | 0.9873 |
| B | 0 | 0.8184 | 1.0176 | 1.2218 | 264.9574 | 2.6259 | 7.1747 | 8.1271 | 8.9807 | 11.2438 | 0.0549 | 0.5916 | 0.7330 | 0.8439 | 0.9781 |
| X | 0 | 0.7970 | 0.9966 | 1.2076 | 230.0495 | 2.6380 | 7.1618 | 8.1233 | 8.9696 | 11.2540 | 0.0392 | 0.5930 | 0.7348 | 0.8461 | 0.9771 |
| Y | 0 | 0.8024 | 1.0022 | 1.2126 | 158.1726 | 2.6340 | 7.1537 | 8.1154 | 8.9556 | 11.1215 | 0.0810 | 0.5948 | 0.7357 | 0.8469 | 0.9922 |
| Z | 0 | 0.8229 | 1.0217 | 1.2262 | 238.1934 | 2.6443 | 7.1611 | 8.1156 | 8.9599 | 11.0945 | 0.0377 | 0.5948 | 0.7354 | 0.8462 | 0.9824 |
| Y′ | 0 | 0.8024 | 1.0009 | 1.2122 | 124.2114 | 2.6329 | 7.1533 | 8.1120 | 8.9572 | 11.2000 | 0.0679 | 0.5948 | 0.7364 | 0.8473 | 0.9767 |
| Cr | 0 | 0 | 0.5328 | 0.9075 | 479.0374 | 4.3705 | 8.5232 | 9.5965 | 10.1616 | 10.9218 | 0.0668 | 0.3479 | 0.4656 | 0.6348 | 0.9979 |
| Cb | 0 | 0.0301 | 0.6558 | 0.9893 | 383.1054 | 3.7606 | 8.3612 | 9.4740 | 10.1213 | 11.1037 | 0.0386 | 0.3359 | 0.4576 | 0.6306 | 0.9931 |
| H | 0 | 0.7259 | 1.1107 | 1.4043 | 1791.3949 | 1.4912 | 8.4892 | 9.4695 | 10.0998 | 11.1104 | 0.0274 | 0.3612 | 0.4878 | 0.6279 | 0.9954 |
| L | 0 | 0.8073 | 1.0051 | 1.2138 | 232.3559 | 2.6425 | 7.1604 | 8.1183 | 8.9682 | 11.3127 | 0.0325 | 0.5932 | 0.7343 | 0.8460 | 0.9796 |
| S | 0 | 0.9138 | 1.1271 | 1.3139 | 532.2115 | 2.6888 | 7.5192 | 8.4918 | 9.3998 | 11.0361 | 0.0282 | 0.4880 | 0.6414 | 0.7797 | 0.9942 |
| L* | 0 | 0.8072 | 1.0061 | 1.2169 | 443.2365 | 2.6271 | 7.1543 | 8.1122 | 8.9584 | 11.0763 | 0.0387 | 0.5954 | 0.7364 | 0.8471 | 0.9814 |
| a* | 0 | 0 | 0.4561 | 0.8876 | 2497.2551 | 3.4712 | 8.7800 | 9.8045 | 10.1946 | 10.9912 | 0.0619 | 0.3376 | 0.4480 | 0.6051 | 0.9903 |
| b* | 0 | 0 | 0.6189 | 0.9804 | 341.4606 | 3.2459 | 8.3756 | 9.5108 | 10.1313 | 11.1813 | 0.0601 | 0.3340 | 0.4592 | 0.6334 | 0.9984 |
| Color Channel | RE | RMSE | SSIM | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | |
| R | −1 | −0.0477 | 0.0111 | 0.0741 | 852.7151 | −0.6608 | −0.0085 | 0.0001 | 0.0092 | 1.7467 | −0.9391 | −0.0249 | −0.0002 | 0.0232 | 10.1168 |
| G | −1 | −0.0511 | 0.0044 | 0.0615 | 332.1132 | −0.6492 | −0.0082 | 0.0001 | 0.0088 | 1.9223 | −0.9366 | −0.0235 | −0.0002 | 0.0225 | 8.2042 |
| B | −1 | −0.0481 | 0.0172 | 0.0902 | 542.3107 | −0.6152 | −0.0080 | 0.0006 | 0.0110 | 2.3887 | −0.9221 | −0.0293 | −0.0012 | 0.0219 | 11.5289 |
| X | −1 | −0.0579 | −0.0043 | 0.0518 | 824.0254 | −0.6296 | −0.0078 | 0.0002 | 0.0088 | 1.9988 | −0.9427 | −0.0240 | −0.0003 | 0.0214 | 10.4170 |
| Y | −1 | −0.0513 | 0.0009 | 0.0550 | 195.2386 | −0.6662 | −0.0081 | 1.82 × 10−5 | 0.0082 | 1.9427 | −0.9080 | −0.0220 | −2.12 × 10−5 | 0.0219 | 11.9081 |
| Z | −1 | −0.0427 | 0.0213 | 0.0909 | 762.2179 | −0.7218 | −0.0087 | 0.0002 | 0.0097 | 2.1930 | −0.9498 | −0.0257 | −0.0003 | 0.0242 | 9.6052 |
| Y′ | −0.8925 | 0 | 0 | 0 | 26.0947 | −0.2221 | −2.21 × 10−11 | 0 | 2.15 × 10−11 | 0.2683 | −0.6383 | −2.34 × 10−10 | 0 | 2.43 × 10−10 | 1.1874 |
| Cr | −1 | −1 | −0.4585 | −0.1018 | 561.2052 | −0.1556 | 0.0625 | 0.1431 | 0.2829 | 1.7261 | −0.8972 | −0.4754 | −0.3029 | −0.1478 | 2.6270 |
| Cb | −1 | −0.9578 | −0.3282 | 0.0032 | 516.4805 | −0.2510 | 0.0458 | 0.1165 | 0.2286 | 2.9749 | −0.9438 | −0.4785 | −0.2917 | −0.1189 | 3.3976 |
| H | −1 | −0.2999 | 0.0795 | 0.5094 | 5242.1047 | −0.8390 | 0.0531 | 0.1252 | 0.2327 | 2.4010 | −0.9596 | −0.4415 | −0.2810 | −0.1412 | 8.3001 |
| L | −1 | −0.0514 | 0.0060 | 0.0661 | 355.8259 | −0.6256 | −0.0082 | 0.0002 | 0.0094 | 2.2343 | −0.9485 | −0.0249 | −0.0004 | 0.0221 | 11.9563 |
| S | −1 | −0.0491 | 0.1300 | 0.3220 | 2169.3907 | −0.6589 | 0.0016 | 0.0233 | 0.0741 | 2.1806 | −0.9463 | −0.1875 | −0.0677 | −0.0081 | 10.6029 |
| L* | −1 | −0.0505 | 0.0054 | 0.0632 | 648.5143 | −0.6329 | −0.0086 | −5.09 × 10−5 | 0.0084 | 2.0023 | −0.9523 | −0.0227 | 6.33 × 10−5 | 0.0236 | 8.9460 |
| a* | −1 | −1 | −0.5424 | −0.1581 | 2143.7176 | −0.2017 | 0.0740 | 0.1611 | 0.3009 | 2.6181 | −0.9073 | −0.4924 | −0.3328 | −0.1660 | 1.9590 |
| b* | −1 | −1 | −0.3608 | −0.0089 | 381.0833 | −0.2206 | 0.0491 | 0.1218 | 0.2401 | 2.5251 | −0.9027 | −0.4818 | −0.2973 | −0.1231 | 3.7708 |
| Feature Detector | RE | RMSE | SSIM | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | |
| AKAZE | 0 | 0.6568 | 0.8834 | 1.1340 | 524.5237 | 2.4982 | 7.1991 | 8.2058 | 9.1134 | 11.2540 | 0.0377 | 0.5728 | 0.7238 | 0.8419 | 0.9910 |
| BRISK | 0 | 0.8745 | 1.0778 | 1.3006 | 778.7086 | 1.7508 | 7.1897 | 8.1602 | 9.0154 | 11.0945 | 0.0436 | 0.5830 | 0.7298 | 0.8442 | 0.9922 |
| CSE | 0 | 0.7422 | 0.9207 | 1.1453 | 339.3203 | 2.6642 | 7.4287 | 8.4110 | 9.2794 | 11.2248 | 0.0282 | 0.5245 | 0.6651 | 0.7958 | 0.9814 |
| FAST | 0 | 0.9257 | 1.1112 | 1.3154 | 383.1054 | 2.6259 | 7.1557 | 8.1359 | 9.0392 | 11.0833 | 0.0389 | 0.5887 | 0.7400 | 0.8538 | 0.9954 |
| HL | 0 | 0.8584 | 1.0380 | 1.2472 | 428.2064 | 1.4912 | 7.2412 | 8.2302 | 9.1089 | 11.2796 | 0.0274 | 0.5648 | 0.7156 | 0.8343 | 0.9863 |
| KAZE | 0 | 0.6833 | 0.9225 | 1.1704 | 1791.3949 | 2.1254 | 7.1924 | 8.1953 | 9.1002 | 10.9844 | 0.0374 | 0.5686 | 0.7266 | 0.8451 | 0.9846 |
| ORB | 0 | 0.9023 | 1.0559 | 1.2350 | 2497.2551 | 2.6346 | 7.5405 | 8.5499 | 9.4351 | 11.4128 | 0.0390 | 0.4660 | 0.6298 | 0.7846 | 0.9948 |
| SIFT | 0 | 0.6747 | 0.8905 | 1.1284 | 627.4206 | 1.5188 | 7.1476 | 8.1495 | 9.0884 | 11.1104 | 0.0293 | 0.5832 | 0.7409 | 0.8518 | 0.9984 |
| TBMR | 0 | 0.8976 | 1.1194 | 1.3020 | 251.3074 | 2.6418 | 7.3862 | 8.3409 | 9.2696 | 11.1813 | 0.0325 | 0.5351 | 0.6823 | 0.8109 | 0.9866 |
| Feature Descriptor | RE | RMSE | SSIM | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | |
| AKAZE | 0 | 0.6475 | 0.8802 | 1.1424 | 157.9498 | 2.6432 | 7.2020 | 8.2082 | 9.1180 | 11.0190 | 0.0567 | 0.5720 | 0.7232 | 0.8409 | 0.9712 |
| BB | 0 | 0.8129 | 1.0296 | 1.2451 | 757.4403 | 2.4982 | 7.2662 | 8.2538 | 9.1667 | 11.1215 | 0.0377 | 0.5520 | 0.7080 | 0.8333 | 0.9979 |
| BRIEF | 0 | 0.8244 | 1.0338 | 1.2487 | 389.1299 | 1.5188 | 7.2679 | 8.2460 | 9.1433 | 11.2540 | 0.0282 | 0.5576 | 0.7087 | 0.8327 | 0.9826 |
| BRISK | 0 | 0.7288 | 0.9284 | 1.1320 | 466.5051 | 1.7044 | 7.2612 | 8.2753 | 9.2346 | 11.0102 | 0.0374 | 0.5487 | 0.7077 | 0.8344 | 0.9954 |
| DAISY | 0 | 0.8032 | 1.0292 | 1.2534 | 421.1894 | 1.4912 | 7.2452 | 8.2260 | 9.1080 | 11.1505 | 0.0601 | 0.5615 | 0.7151 | 0.8369 | 0.9863 |
| FREAK | 0 | 0.7080 | 0.9016 | 1.1169 | 1791.3949 | 2.2251 | 7.3115 | 8.3258 | 9.2896 | 11.4128 | 0.0274 | 0.5344 | 0.6951 | 0.8270 | 0.9945 |
| KAZE | 0 | 0.6428 | 0.8981 | 1.1690 | 130.8570 | 2.6395 | 7.2435 | 8.2682 | 9.2238 | 10.8529 | 0.0795 | 0.5449 | 0.7155 | 0.8415 | 0.9771 |
| LATCH | 0 | 0.8625 | 1.0818 | 1.2958 | 783.5445 | 2.6259 | 7.3006 | 8.2769 | 9.1702 | 11.1286 | 0.0293 | 0.5462 | 0.6985 | 0.8272 | 0.9979 |
| ORB | 0 | 0.8233 | 1.0219 | 1.2167 | 2497.2551 | 1.7508 | 7.2953 | 8.2827 | 9.2057 | 11.2796 | 0.0325 | 0.5489 | 0.7027 | 0.8283 | 0.9948 |
| SIFT | 0 | 0.8459 | 1.0662 | 1.2871 | 627.4206 | 1.6517 | 7.2750 | 8.2512 | 9.1394 | 11.2248 | 0.0390 | 0.5529 | 0.7065 | 0.8324 | 0.9984 |
| VGG | 0 | 0.8326 | 1.0447 | 1.2584 | 479.0374 | 2.1254 | 7.2579 | 8.2365 | 9.1280 | 11.1104 | 0.0421 | 0.5581 | 0.7125 | 0.8351 | 0.9984 |
| Color Channel | Detector Feature Number | Homography Feature Number | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | |
| GS | 4 | 420 | 735 | 1715 | 16,556 | 4 | 54 | 157 | 436 | 10,460 |
| R | 5 | 424 | 746 | 1728.75 | 16,611 | 4 | 53 | 155 | 432 | 10,670 |
| G | 5 | 425 | 740 | 1727 | 16,565 | 4 | 54 | 157 | 436 | 10,586 |
| B | 4 | 413 | 721 | 1669 | 16,575 | 4 | 49 | 144 | 400 | 10,191 |
| X | 4 | 399 | 695.5 | 1619 | 16,254 | 4 | 52 | 151 | 412 | 10,417 |
| Y | 4 | 422 | 737.5 | 1717.75 | 16,597 | 4 | 54 | 157 | 437 | 10,638 |
| Z | 4 | 449 | 778 | 1833.75 | 17,013 | 4 | 53 | 155 | 442 | 10,610 |
| Y′ | 5 | 420 | 735.5 | 1715 | 16,556 | 4 | 54 | 157 | 437 | 10,460 |
| Cr | 4 | 11 | 24 | 51 | 260 | 4 | 4 | 6 | 11 | 86 |
| Cb | 4 | 13 | 31 | 79 | 512 | 4 | 5 | 7 | 15 | 236 |
| H | 4 | 167 | 390 | 667 | 4224 | 4 | 6 | 10 | 27 | 447 |
| L | 4 | 415 | 724.5 | 1695 | 16,481 | 4 | 52.25 | 152 | 423 | 10,324 |
| S | 4 | 337 | 575 | 1487 | 14,673 | 4 | 15 | 53 | 167 | 9701 |
| L* | 5 | 441 | 768.5 | 1799 | 17,047 | 4 | 56 | 162 | 457 | 10,474 |
| a* | 4 | 11 | 25 | 58 | 224 | 4 | 4 | 6 | 9 | 84 |
| b* | 4 | 12 | 29 | 80 | 453 | 4 | 4 | 7 | 14 | 237 |
| Feature Detector | Detector Feature Number | Homography Feature Number | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Min | Q1 | Median | Q3 | Max | Min | Q1 | Median | Q3 | Max | |
| AKAZE | 4 | 269 | 707 | 1063 | 2947 | 4 | 31 | 145 | 360 | 2021 |
| BRISK | 4 | 733 | 2219 | 4006 | 13746 | 4 | 58 | 328 | 877 | 6866 |
| CSE | 4 | 107 | 244 | 386 | 1073 | 4 | 13 | 52 | 124 | 771 |
| FAST | 4 | 893 | 3987.5 | 7341 | 17,047 | 4 | 69 | 600 | 1756 | 10,670 |
| HL | 4 | 256 | 618 | 1059 | 3488 | 4 | 26 | 97 | 227 | 1514 |
| KAZE | 4 | 341 | 964 | 1395 | 3394 | 4 | 36 | 177 | 448 | 2529 |
| ORB | 4 | 496 | 500 | 500 | 501 | 4 | 21 | 62 | 125 | 376 |
| SIFT | 4 | 389 | 1375 | 2613 | 6576 | 4 | 25 | 171 | 467 | 2588 |
| TBMR | 4 | 98 | 351 | 621 | 1310 | 4 | 9 | 33 | 98 | 551 |
| Feature Descriptor | Homography Feature Number | ||||
|---|---|---|---|---|---|
| Min | Q1 | Median | Q3 | Max | |
| AKAZE | 4 | 44 | 191 | 429 | 4860 |
| BB | 4 | 32 | 133 | 440 | 29,264 |
| BRIEF | 4 | 37 | 140 | 437 | 25,130 |
| BRISK | 4 | 25 | 111 | 373 | 25,094 |
| DAISY | 4 | 43 | 161 | 505 | 29,265 |
| FREAK | 4 | 20 | 87 | 338 | 21,257 |
| KAZE | 4 | 38 | 215 | 525 | 5596 |
| LATCH | 4 | 34 | 135 | 407 | 26,330 |
| ORB | 4 | 30 | 127 | 380 | 25,698 |
| SIFT | 4 | 37 | 145 | 481 | 31,523 |
| VGG | 4 | 40 | 155 | 499 | 31,604 |
| Place | RE | RMSE | SSIM | Detector Feature Number | Homography Feature Number | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Combination | Value | Combination | Value | Combination | Value | Combination | Value | Combination | Value | |
| 1st | L+KAZE+BRISK | 0.8626 | RGB+SIFT+VGG | 7.8020 | XYZ+SIFT+SIFT | 0.7467 | Z+FAST+VGG | 11,641.89 | Z+FAST+VGG | 1960.12 |
| 2nd | XYZ+KAZE+BRISK | 0.8631 | XYZ+SIFT+SIFT | 7.8038 | XYZ+SIFT+VGG | 0.7453 | Z+FAST+BB | 11,641.89 | L*+FAST+VGG | 1925.72 |
| 3rd | RGB+SIFT+BRISK | 0.8635 | XYZ+SIFT+VGG | 7.8056 | RGB+SIFT+SIFT | 0.7446 | Z+FAST+BRISK | 11,641.89 | G+FAST+VGG | 1885.80 |
| 4th | X+KAZE+FREAK | 0.8639 | RGB+FAST+VGG | 7.8059 | RGB+SIFT+VGG | 0.7440 | L*+FAST+VGG | 11,175.85 | Y+FAST+VGG | 1884.00 |
| 5th | Y′CrCb+KAZE+BRISK | 0.8660 | RGB+FAST+DAISY | 7.8078 | G+FAST+VGG | 0.7439 | L*+FAST+DAISY | 11,175.85 | R+FAST+VGG | 1875.15 |
| 6th | Y′+KAZE+BRISK | 0.8702 | Y′CrCb+FAST+VGG | 7.8092 | Y′+FAST+VGG | 0.7436 | L*+FAST+BRISK | 11,175.85 | Y′+FAST+VGG | 1868.76 |
| 7th | Y+KAZE+BRISK | 0.8704 | Y′+FAST+VGG | 7.8106 | B+SIFT+SIFT | 0.7435 | L*+FAST+SIFT | 11,175.85 | GS+FAST+VGG | 1867.36 |
| 8th | GS+KAZE+BRISK | 0.8713 | GS+FAST+VGG | 7.8109 | GS+FAST+VGG | 0.7435 | B+FAST+VGG | 11,018.69 | L*+FAST+SIFT | 1855.61 |
| 9th | R+SIFT+BRISK | 0.8725 | R+FAST+VGG | 7.8126 | RGB+FAST+VGG | 0.7434 | B+FAST+DAISY | 11,018.69 | B+FAST+VGG | 1848.31 |
| 10th | RGB+SIFT+BB | 0.8744 | Z+FAST+VGG | 7.8127 | Y+FAST+VGG | 0.7433 | B+FAST+BRISK | 11,018.69 | X+FAST+VGG | 1826.52 |
References
- Wang, Z.; Yang, Z. Review on Image-Stitching Techniques. Multimed. Syst. 2020, 26, 413–430. [Google Scholar] [CrossRef]
- Kuppala, K.; Banda, S.; Barige, T.R. An Overview of Deep Learning Methods for Image Registration with Focus on Feature-Based Approaches. Int. J. Image Data Fusion 2020, 11, 113–135. [Google Scholar] [CrossRef]
- Xing, C.; Qiu, P. Intensity Based Image Registration By Nonparametric Local Smoothing. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2081–2092. [Google Scholar] [CrossRef] [PubMed]
- Sharma, S.K.; Jain, K.; Shukla, A.K. A Comparative Analysis of Feature Detectors and Descriptors for Image Stitching. Appl. Sci. 2023, 13, 6015. [Google Scholar] [CrossRef]
- Boveiri, H.R.; Khayami, R.; Javidan, R.; Mehdizadeh, A. Medical Image Registration Using Deep Neural Networks: A Comprehensive Review. Comput. Electr. Eng. 2020, 87, 106767. [Google Scholar] [CrossRef]
- Fu, Y.; Lei, Y.; Wang, T.; Curran, W.J.; Liu, T.; Yang, X. Deep Learning in Medical Image Registration: A Review. Phys. Med. Biol. 2020, 65, 20TR01. [Google Scholar] [CrossRef]
- Kresović, M.; Hardeberg, J.Y. Digital Restoration of Lost Art: Applying the Colorization Transformer to the Ghent Altarpiece Panels. Final Progr. Proc.—IS T/SID Color Imaging Conf. 2022, 30, 118–123. [Google Scholar] [CrossRef]
- Qiu, S.; Zhou, D.; Guo, Q.; Qin, H.; Yan, X.; Yang, J. Star Map Stitching Algorithm Based on Visual Principle. Int. J. Pattern Recognit. Artif. Intell. 2018, 32, 1850028. [Google Scholar] [CrossRef]
- Lee, A.; Jang, I. Robust Multithreaded Object Tracker through Occlusions for Spatial Augmented Reality. ETRI J. 2018, 40, 246–256. [Google Scholar] [CrossRef]
- Allen, P.; Feiner, S.; Troccoli, A.; Benko, H.; Ishak, E.; Smith, B. Seeing into the Past: Creating a 3D Modeling Pipeline for Archaeological Visualization. In Proceedings of the 2nd International Symposium on 3D Data Processing, Visualization and Transmission, 3DPVT 2004, Thessaloniki, Greece, 9 September 2004; pp. 751–758. [Google Scholar] [CrossRef]
- Ma, B.; Ban, X.; Huang, H.; Liu, W.; Liu, C.; Wu, D.; Zhi, Y. A Fast Algorithm for Material Image Sequential Stitching. Comput. Mater. Sci. 2019, 158, 1–13. [Google Scholar] [CrossRef]
- Yuan, W.; Choi, D. UAV-Based Heating Requirement Determination for Frost Management in Apple Orchard. Remote Sens. 2021, 13, 273. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Y.; Wang, T.; Zhang, Y.; Zhang, Z.; Yu, Y.; Li, L. Stitching and Geometric Modeling Approach Based on Multi-Slice Satellite Images. Remote Sens. 2021, 13, 4663. [Google Scholar] [CrossRef]
- Bergen, T.; Wittenberg, T. Stitching and Surface Reconstruction from Endoscopic Image Sequences: A Review of Applications and Methods. IEEE J. Biomed. Health Inform. 2016, 20, 304–321. [Google Scholar] [CrossRef] [PubMed]
- Gu, X.; Song, P.; Rao, Y.; Soo, Y.G.; Yeong, C.F.; Tan, J.T.C.; Asama, H.; Duan, F. Dynamic Image Stitching for Moving Object. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 1770–1775. [Google Scholar] [CrossRef]
- Wang, J.; Chun, J. Image Registration for an Imaging System On-Board Fast Moving Military Vehicle. In Proceedings of the IEEE 2000 National Aerospace and Electronics Conference. NAECON 2000. Engineering Tomorrow (Cat. No.00CH37093), Dayton, OH, USA, 12 October 2000. [Google Scholar]
- Peli, E.; Augliere, R.A.; Timberlake, G.T. Feature-Based Registration of Retinal Images. IEEE Trans. Med. Imaging 1987, 6, 272–278. [Google Scholar] [CrossRef] [PubMed]
- Ramli, R.; Hasikin, K.; Idris, M.Y.I.; Karim, N.K.A.; Wahab, A.W.A. Fundus Image Registration Technique Based on Local Feature of Retinal Vessels. Appl. Sci. 2021, 11, 11201. [Google Scholar] [CrossRef]
- Nan, J.; Su, J.; Zhang, J. Methodological Research on Image Registration Based on Human Brain Tissue In Vivo. Electronics 2023, 12, 738. [Google Scholar] [CrossRef]
- Hou, X.; Gao, Q.; Wang, R.; Luo, X. Satellite-Borne Optical Remote Sensing Image Registration Based on Point Features. Sensors 2021, 21, 2695. [Google Scholar] [CrossRef] [PubMed]
- Kerkech, M.; Hafiane, A.; Canals, R. Vine Disease Detection in UAV Multispectral Images Using Optimized Image Registration and Deep Learning Segmentation Approach; Elsevier: Amsterdam, The Netherlands, 2020; Volume 174, ISBN 0168169919325. [Google Scholar]
- Xue, S.; Zhang, X.; Zhang, H.; Yang, C. Visible and Infrared Missile-Borne Image Registration Based on Improved SIFT and Joint Features. J. Phys. Conf. Ser. 2021, 2010, 12103. [Google Scholar] [CrossRef]
- Wang, Z.; Li, C.; Zhang, G.; Zheng, S.; Liu, X.; Fang, G. A Novel Coarse-to-Fine Image Registration for Repeat-Pass InSAR Based on Gabor Filter Feature and Its Application in Terahertz Region. IEEE Access 2024, 12, 18508–18519. [Google Scholar] [CrossRef]
- Bush, J.; Ninić, J.; Thermou, G.; Tachtsi, L.; Hill, P.; Denton, S.; Bennetts, J. Image Registration for Bridge Defect Growth Tracking. In Bridge Safety, Maintenance, Management, Life-Cycle, Resilience and Sustainability; CRC Press: Boca Raton, FL, USA, 2022; pp. 1044–1052. [Google Scholar] [CrossRef]
- Alcantarilla, P.F.; Nuevo, J.; Bartoli, A. Fast Explicit Diffusion for Accelerated Features in Nonlinear Scale Spaces. In Proceedings of the BMVC 2013-Electronic Proceedings of the British Machine Vision Conference, Bristol, UK, 9–13 September 2013. [CrossRef]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary Robust Invariant Scalable Keypoints. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2548–2555. [Google Scholar]
- Agrawal, M.; Konolige, K.; Blas, M.R. CenSurE: Center Surround Extremas for Realtime Feature Detection and Matching BT—Computer Vision—ECCV 2008. In Proceedings of the 10th European Conference on Computer Vision, Marseille, France, 12–18 October 2008; Volume 5305, pp. 102–115. [Google Scholar]
- Rosten, E.; Drummond, T. Machine Learning for High-Speed Corner Detection. In Proceedings of the 9th European Conference on Computer Vision (ECCV 2006), Graz, Austria, 7–13 May 2006; pp. 430–443. [Google Scholar]
- Mikolajczyk, K.; Schmid, C. Scale & Affine Invariant Interest Point Detectors KRYSTIAN. Int. J. Comput. Vis. 2004, 60, 63–86. [Google Scholar]
- Alcantarilla, P.F.; Bartoli, A.; Davison, A.J. KAZE Features. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7577. [Google Scholar] [CrossRef]
- Tombari, F.; Di Stefano, L. Interest Points via Maximal Self-Dissimilarities. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2015; Volume 9004. [Google Scholar] [CrossRef]
- Hasenbusch, M.; Pelissetto, A.; Vicari, E. ORB: An Efficient Alternative to SIFT or SURF Ethan. J. Stat. Mech. Theory Exp. 2008, 2008, 2564–2571. [Google Scholar]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. SURF: Speeded up Robust Features. In Proceedings of the 9th European Conference on Computer Vision (ECCV 2006), Graz, Austria, 7–13 May 2006; pp. 404–417. [Google Scholar]
- Xu, Y.; Monasse, P.; Geraud, T.; Najman, L. Tree-Based Morse Regions: A Topological Approach to Local Feature Detection. IEEE Trans. Image Process. 2014, 23, 5612–5625. [Google Scholar] [CrossRef]
- Trzcinski, T.; Christoudias, M.; Fua, P.; Lepetit, V. Boosting Binary Keypoint Descriptors. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 23–28 June 2013; pp. 2874–2881. [Google Scholar] [CrossRef]
- Suarez, I.; Sfeir, G.; Buenaposada, J.M.; Baumela, L. BEBLID: Boosted Efficient Binary Local Image Descriptor. Pattern Recognit. Lett. 2019, 133, 366–372. [Google Scholar] [CrossRef]
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. BRIEF: Binary Robust Independent Elementary Features. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6314. [Google Scholar] [CrossRef]
- Tola, E.; Lepetit, V.; Fua, P. DAISY: An Efficient Dense Descriptor Applied to Wide-Baseline Stereo. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 815–830. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of Oriented Gradients for Human Detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 1–8. [Google Scholar]
- Levi, G.; Hassner, T. LATCH: Learned Arrangements of Three Patch Codes. In Proceedings of the 2016 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Placid, NY, USA, 7–10 March 2016. [Google Scholar] [CrossRef]
- Alahi, A.; Ortiz, R.; Vandergheynst, P. FREAK: Fast Retina Keypoint. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 510–517. [Google Scholar] [CrossRef]
- Kruliš, M.; Lokoč, J.; Skopal, T. Efficient Extraction of Clustering-Based Feature Signatures Using GPU Architectures. Multimed. Tools Appl. 2016, 75, 8071–8103. [Google Scholar] [CrossRef]
- Beecks, C.; Uysal, M.S.; Seidl, T. Signature Quadratic Form Distance. In Proceedings of the CIVR 2010—2010 ACM International ConferenceImage Video Retrieval, Xi’an China, 5–7 July 2010; pp. 438–445. [Google Scholar] [CrossRef]
- Suarez, I.; Buenaposada, J.M.; Baumela, L. Revisiting Binary Local Image Description for Resource Limited Devices. IEEE Robot. Autom. Lett. 2021, 6, 8317–8324. [Google Scholar] [CrossRef]
- Simonyan, K.; Vedaldi, A.; Zisserman, A. Learning Local Feature Descriptors Using Convex Optimisation. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 36, 1573–1585. [Google Scholar] [CrossRef]
- Hamming, R.W. Error Detecting and Error Correcting Codes. Bell Syst. Tech. J. 1950, 29, 147–160. [Google Scholar] [CrossRef]
- Jakubović, A.; Velagić, J. Image Feature Matching and Object Detection Using Brute-Force Matchers. In Proceedings of the 2018 International Symposium ELMAR, Zadar, Croatia, 16–19 September 2018; pp. 83–86. [Google Scholar] [CrossRef]
- Ihmeida, M.; Wei, H. Image Registration Techniques and Applications: Comparative Study on Remote Sensing Imagery. In Proceedings of the 2021 14th International Conference on Developments in eSystems Engineering (DeSE), Sharjah, United Arab Emirates, 7–10 December 2021; pp. 142–148. [Google Scholar] [CrossRef]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Mou, W.; Wang, H.; Seet, G.; Zhou, L. Robust Homography Estimation Based on Non-Linear Least Squares Optimization. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 372–377. [Google Scholar] [CrossRef]
- Dubrofsky, E. Homography Estimation. Master’s Thesis, The University of British Columbia, Vancouver, BC, Canada, 2007. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Chum, O.; Matas, J. Matching with PROSAC—Progressive Sample Consensus. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 220–226. [Google Scholar] [CrossRef]
- Köhler, H.; Pfahl, A.; Moulla, Y.; Thomaßen, M.T.; Maktabi, M.; Gockel, I.; Neumuth, T.; Melzer, A.; Chalopin, C. Comparison of Image Registration Methods for Combining Laparoscopic Video and Spectral Image Data. Sci. Rep. 2022, 12, 16459. [Google Scholar] [CrossRef] [PubMed]
- Tareen, S.A.K.; Saleem, Z. A Comparative Analysis of SIFT, SURF, KAZE, AKAZE, ORB, and BRISK. In Proceedings of the 2018 International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; pp. 1–10. [Google Scholar]
- Wu, J.; Cui, Z.; Sheng, V.S.; Zhao, P.; Su, D.; Gong, S. A Comparative Study of SIFT and Its Variants. Meas. Sci. Rev. 2013, 13, 122–131. [Google Scholar] [CrossRef]
- Kanan, C.; Cottrell, G.W. Color-to-Grayscale: Does the Method Matter in Image Recognition? PLoS ONE 2012, 7, e29740. [Google Scholar] [CrossRef] [PubMed]
- Dissanayake, V.; Herath, S.; Rasnayaka, S.; Seneviratne, S.; Vidanaarachchi, R.; Gamage, C. Quantitative and Qualitative Evaluation of Performance and Robustness of Image Stitching Algorithms. In Proceedings of the 2015 International Conference on Digital Image Computing: Techniques and Applications (DICTA), Adelaide, Australia, 23–25 November 2015. [Google Scholar] [CrossRef]
- Lin, C.-C.; Pankanti, S.U.; Ramamurthy, K.N.; Aravkin, A.Y. Adaptive As-Natural-As-Possible Image Stitching. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1155–1163. [Google Scholar]
- Yao, L.; Lizhuang, M. A Fast and Robust Image Stitching Algorithm. Proc. World Congr. Intell. Control Autom. 2006, 2, 9604–9608. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, F. Casual Stereoscopic Panorama Stitching. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 2002–2010. [Google Scholar]
- Zhang, J.; Chen, G.; Jia, Z. An Image Stitching Algorithm Based on Histogram Matching and SIFT Algorithm. Int. J. Pattern Recognit. Artif. Intell. 2017, 31, 1754006. [Google Scholar] [CrossRef]
- Tahoun, M.; Shabayek, A.E.R.; Nassar, H.; Giovenco, M.M.; Reulke, R.; Emary, E.; Hassanien, A.E. Satellite Image Matching and Registration: A Comparative Study Using Invariant Local Features. In Image Feature Detectors and Descriptors; Springer: Berlin/Heidelberg, Germany, 2016; pp. 135–171. ISBN 9783319288543. [Google Scholar]
- Cheung, G.; Yang, L.; Tan, Z.; Huang, Z. A Content-Aware Metric for Stitched Panoramic Image Quality Assessment. In Proceedings of the 2017 IEEE International Conference on Computer Vision Workshops (ICCVW), Venice, Italy, 22–29 October 2017; pp. 2487–2494. [Google Scholar] [CrossRef]
- Yan, W.; Yue, G.; Fang, Y.; Chen, H.; Tang, C.; Jiang, G. Perceptual Objective Quality Assessment of Stereoscopic Stitched Images. Signal Process. 2020, 172, 107541. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C. A Universal Image Quality Index. IEEE Signal Process. Lett. 2002, 9, 81–84. [Google Scholar] [CrossRef]
- Nie, L.; Lin, C.; Liao, K.; Liu, S.; Zhao, Y. Unsupervised Deep Image Stitching: Reconstructing Stitched Features to Images. IEEE Trans. Image Process. 2021, 30, 6184–6197. [Google Scholar] [CrossRef]
- Zhang, D. Color Feature Extraction. In Fundamentals of Image Data Mining: Analysis, Features, Classification and Retrieval; Springer: Berlin/Heidelberg, Germany, 2021; pp. 59–74. ISBN 9781849962254. [Google Scholar]
- Color Conversions. Available online: https://docs.opencv.org/4.9.0/de/d25/imgproc_color_conversions.html (accessed on 15 March 2024).
- Scikit-Image: Image Processing in Python. Available online: https://scikit-image.org/ (accessed on 15 March 2024).
- Ardekani, B.A.; Braun, M.; Hutton, B.F.; Kanno, I.; Iida, H. A Fully Automatic Multimodality Image Registration Algorithm. J. Comput. Assist. Tomogr. 1995, 19, 615–623. [Google Scholar] [CrossRef]
- Slomka, P.J.; Baum, R.P. Multimodality Image Registration with Software: State-of-the-Art. Eur. J. Nucl. Med. Mol. Imaging 2009, 36, 44–55. [Google Scholar] [CrossRef]
- Oktay, O.; Schuh, A.; Rajchl, M.; Keraudren, K.; Gomez, A.; Heinrich, M.P.; Penney, G.; Rueckert, D. Structured Decision Forests For Multi-Modal Ultrasound Image Registration. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015, Munich, Germany, 5–9 October 2015; pp. 1–8. [Google Scholar]
- Li, J.; Hu, Q.; Ai, M. RIFT: Multi-Modal Image Matching Based on Radiation-Variation Insensitive Feature Transform. IEEE Trans. Image Process. 2020, 29, 3296–3310. [Google Scholar] [CrossRef] [PubMed]
- Du, Q.; Fan, A.; Ma, Y.; Fan, F.; Huang, J.; Mei, X. Infrared and Visible Image Registration Based on Scale-Invariant PIIFD Feature and Locality Preserving Matching. IEEE Access 2018, 6, 64107–64121. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, X.; Zhang, Y.; Maybank, S.J.; Fu, Z. Visible and Infrared Image Registration Based on Region Features and Edginess. Mach. Vis. Appl. 2018, 29, 113–123. [Google Scholar] [CrossRef]
- Lowe, D.G. Object Recognition from Local Scale-Invariant Features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Corfu, Greece, 20–27 September 1999; pp. 1150–1157. [Google Scholar]
- Wang, X.; Bai, X.; Liu, W.; Latecki, L.J. Feature Context for Image Classification and Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, CO, USA, 20–25 June 2011; pp. 961–968. [Google Scholar] [CrossRef]
- Latif, A.; Rasheed, A.; Sajid, U.; Ahmed, J.; Ali, N.; Ratyal, N.I.; Zafar, B.; Dar, S.H.; Sajid, M.; Khalil, T. Content-Based Image Retrieval and Feature Extraction: A Comprehensive Review. Math. Probl. Eng. 2019, 2019, 9658350. [Google Scholar] [CrossRef]
- Fan, B.; Kong, Q.; Wang, X.; Wang, Z.; Xiang, S.; Pan, C.; Fua, P. A Performance Evaluation of Local Features for Image-Based 3D Reconstruction. IEEE Trans. Image Process. 2019, 28, 4774–4789. [Google Scholar] [CrossRef]



| Feature Detector | Reference | OpenCV Initialization Function |
|---|---|---|
| AKAZE | [25] | cv2.AKAZE_create() |
| BRISK | [26] | cv2.BRISK_create() |
| CSE | [27] | cv2.xfeatures2d.StarDetector_create() |
| FAST | [28] | cv2.FastFeatureDetector_create() |
| HL | [29] | cv2.xfeatures2d.HarrisLaplaceFeatureDetector_create() |
| KAZE | [30] | cv2.KAZE_create() |
| ORB | [32] | cv2.ORB_create() |
| SIFT | [33] | cv2.SIFT_create() |
| TBMR | [35] | cv2.xfeatures2d.TBMR_create() |
| Feature Descriptor | Reference | OpenCV Initialization Function |
|---|---|---|
| AKAZE | [25] | cv2.AKAZE_create() |
| BB | [36] | cv2.xfeatures2d.BoostDesc_create() |
| BRIEF | [38] | cv2.xfeatures2d.BriefDescriptorExtractor_create() |
| BRISK | [26] | cv2.BRISK_create() |
| DAISY | [39] | cv2.xfeatures2d.DAISY_create() |
| FREAK | [36] | cv2.xfeatures2d.FREAK_create() |
| KAZE | [30] | cv2.KAZE_create() |
| LATCH | [41] | cv2.xfeatures2d.LATCH_create() |
| ORB | [32] | cv2.ORB_create() |
| SIFT | [33] | cv2.SIFT_create() |
| VGG | [46] | cv2.xfeatures2d.VGG_create() |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, W.; Poosa, S.R.P.; Dirks, R.F. Comparative Analysis of Color Space and Channel, Detector, and Descriptor for Feature-Based Image Registration. J. Imaging 2024, 10, 105. https://doi.org/10.3390/jimaging10050105
Yuan W, Poosa SRP, Dirks RF. Comparative Analysis of Color Space and Channel, Detector, and Descriptor for Feature-Based Image Registration. Journal of Imaging. 2024; 10(5):105. https://doi.org/10.3390/jimaging10050105
Chicago/Turabian StyleYuan, Wenan, Sai Raghavendra Prasad Poosa, and Rutger Francisco Dirks. 2024. "Comparative Analysis of Color Space and Channel, Detector, and Descriptor for Feature-Based Image Registration" Journal of Imaging 10, no. 5: 105. https://doi.org/10.3390/jimaging10050105
APA StyleYuan, W., Poosa, S. R. P., & Dirks, R. F. (2024). Comparative Analysis of Color Space and Channel, Detector, and Descriptor for Feature-Based Image Registration. Journal of Imaging, 10(5), 105. https://doi.org/10.3390/jimaging10050105