Qualitative Methods for the Inverse Obstacle Problem: A Comparison on Experimental Data



Abstract
:1. Introduction
2. Materials and Methods
2.1. Mathematical Formulation of the Problem
2.2. Linear Sampling Method
2.3. Orthogonality Sampling Method
2.4. Shape Reconstruction Via Joint Sparsity Based Inverse Source and Equivalence Principles
2.5. Applicability and Limititations of the Three Methods
3. Results
- the DielTM target, which consists of a dielectric homogeneous cylinder of radius 1.5 cm and relative permittivity 3 ± 0.3
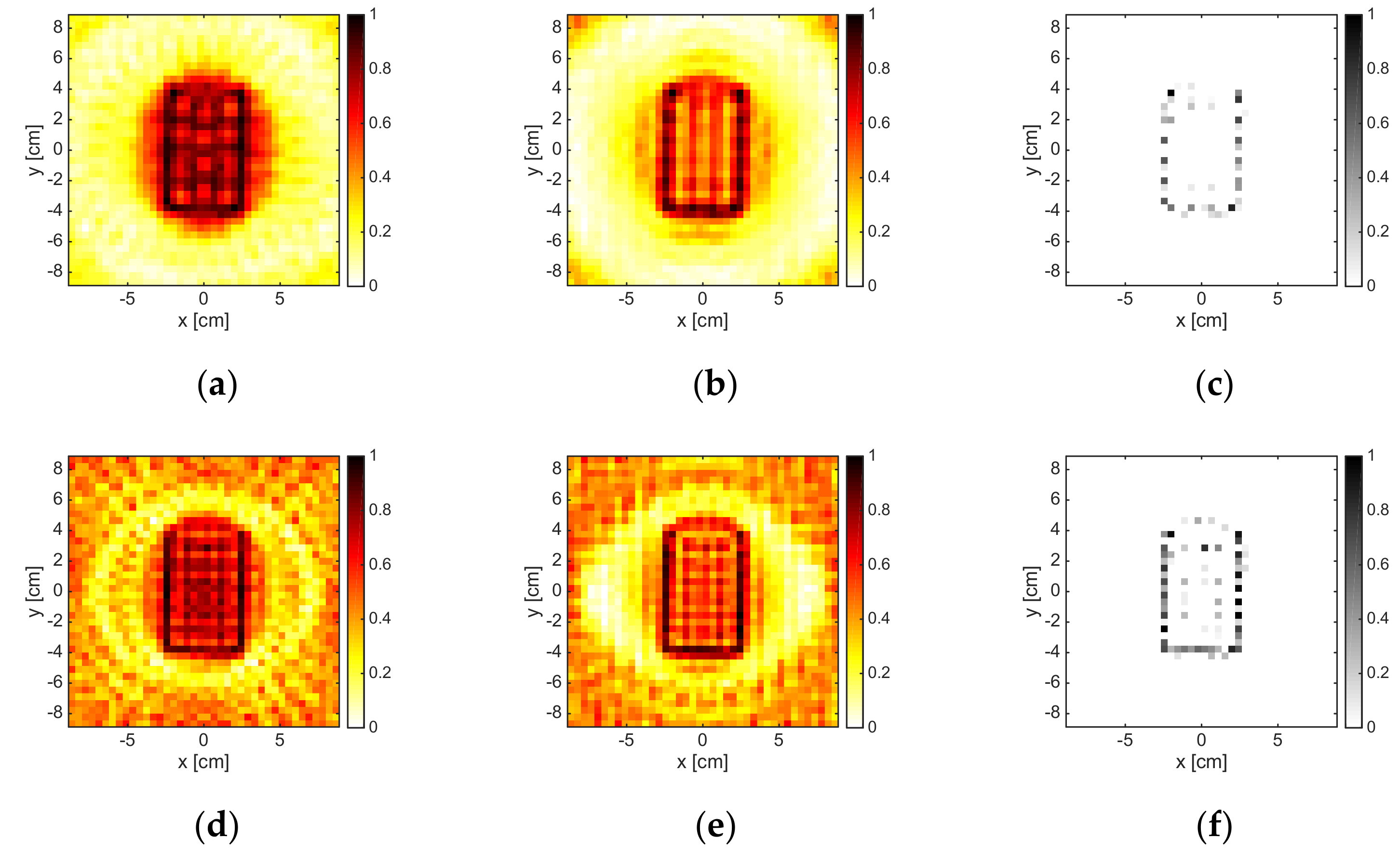
- the RectTM_Dece target, which is a rectangular metallic target of 25.4 mm × 12.7 mm not centered with respect to the azimuthal positioner axis;
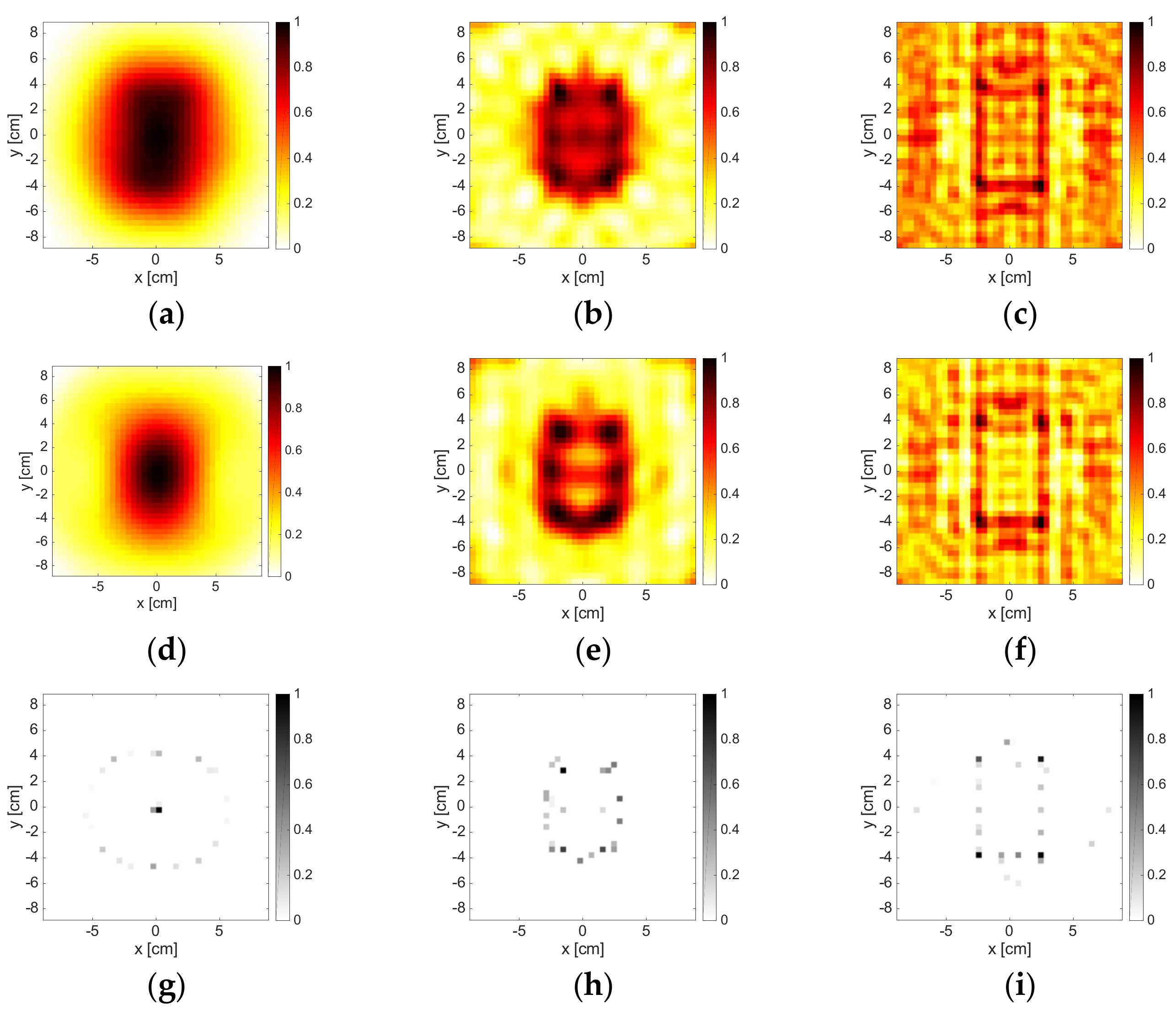
- the U-TM shaped target, which is a metallic U-shaped target with dimension 80 × 50 mm2
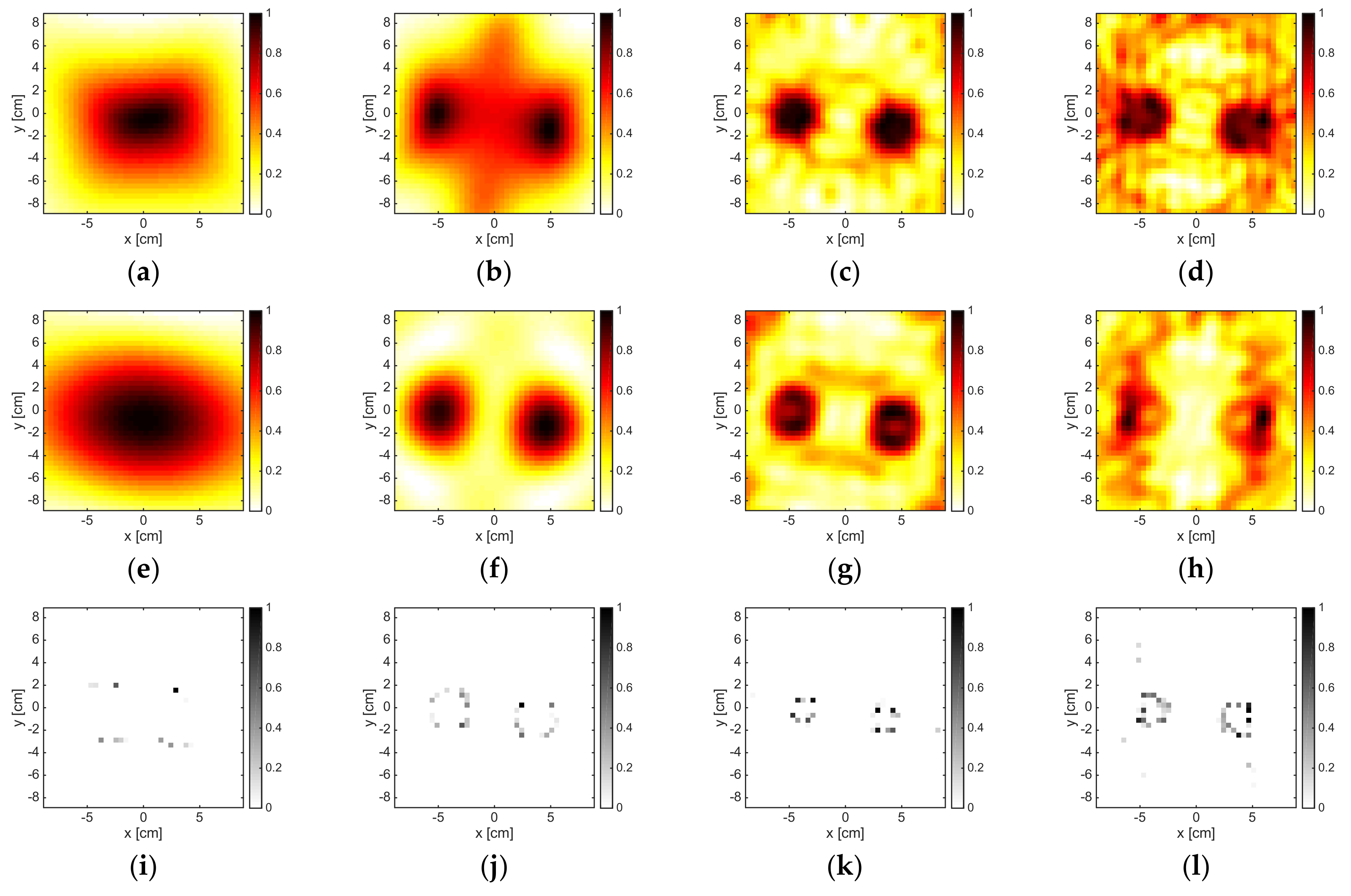
- the TwinDielTM target, which consists of two identical dielectric homogeneous cylinders of radius 1.5 cm and relative permittivity 3 ± 0.3.
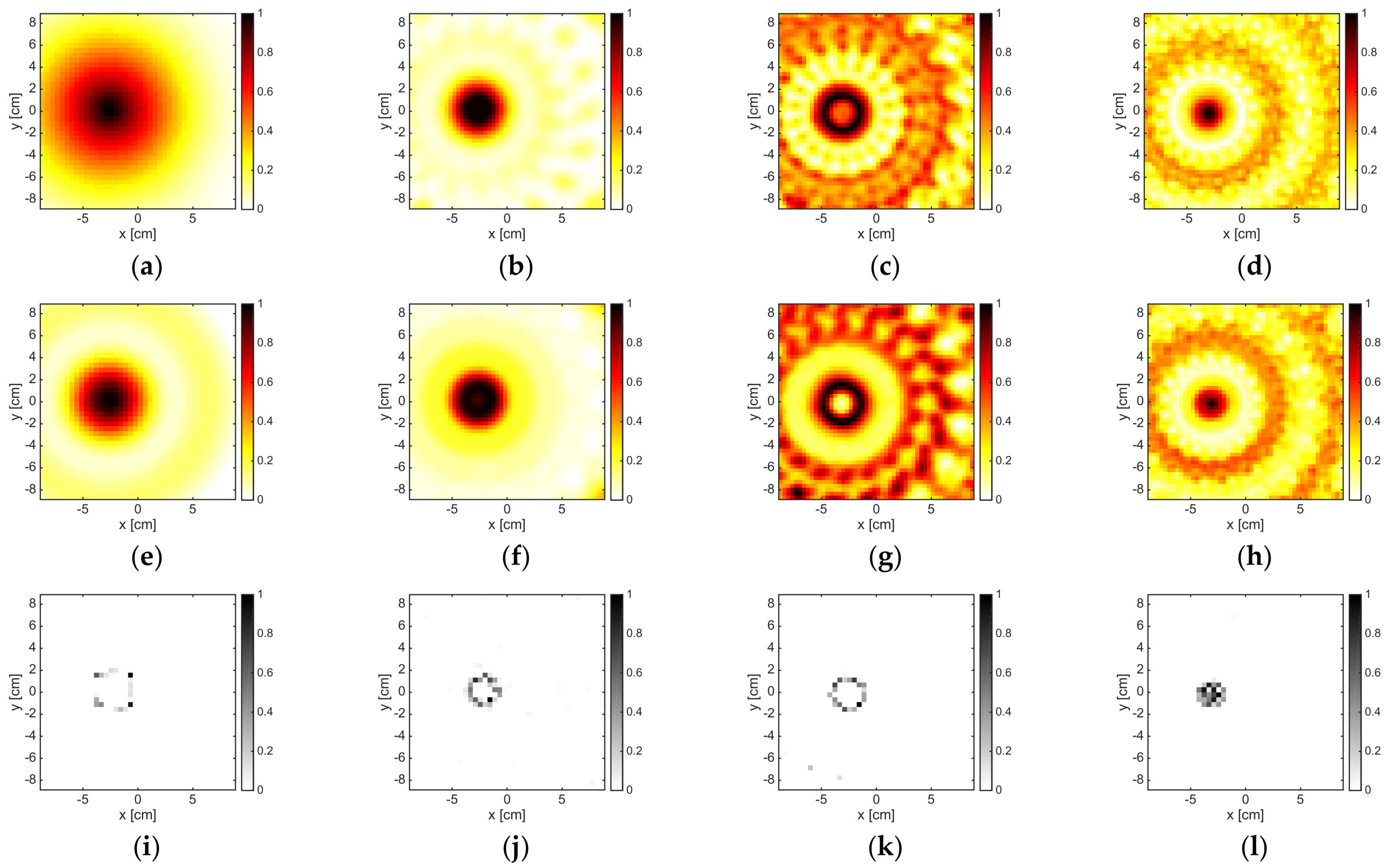
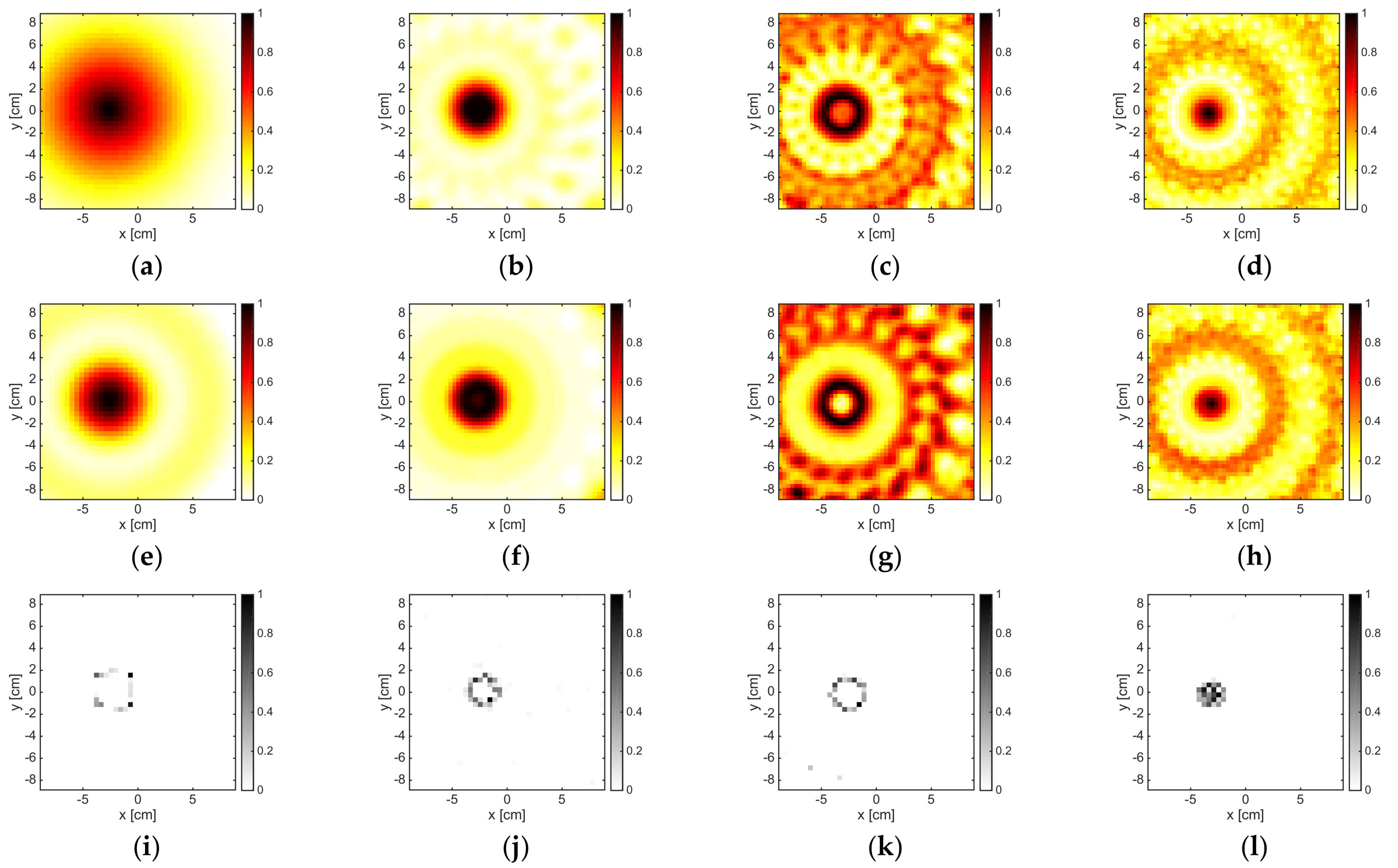
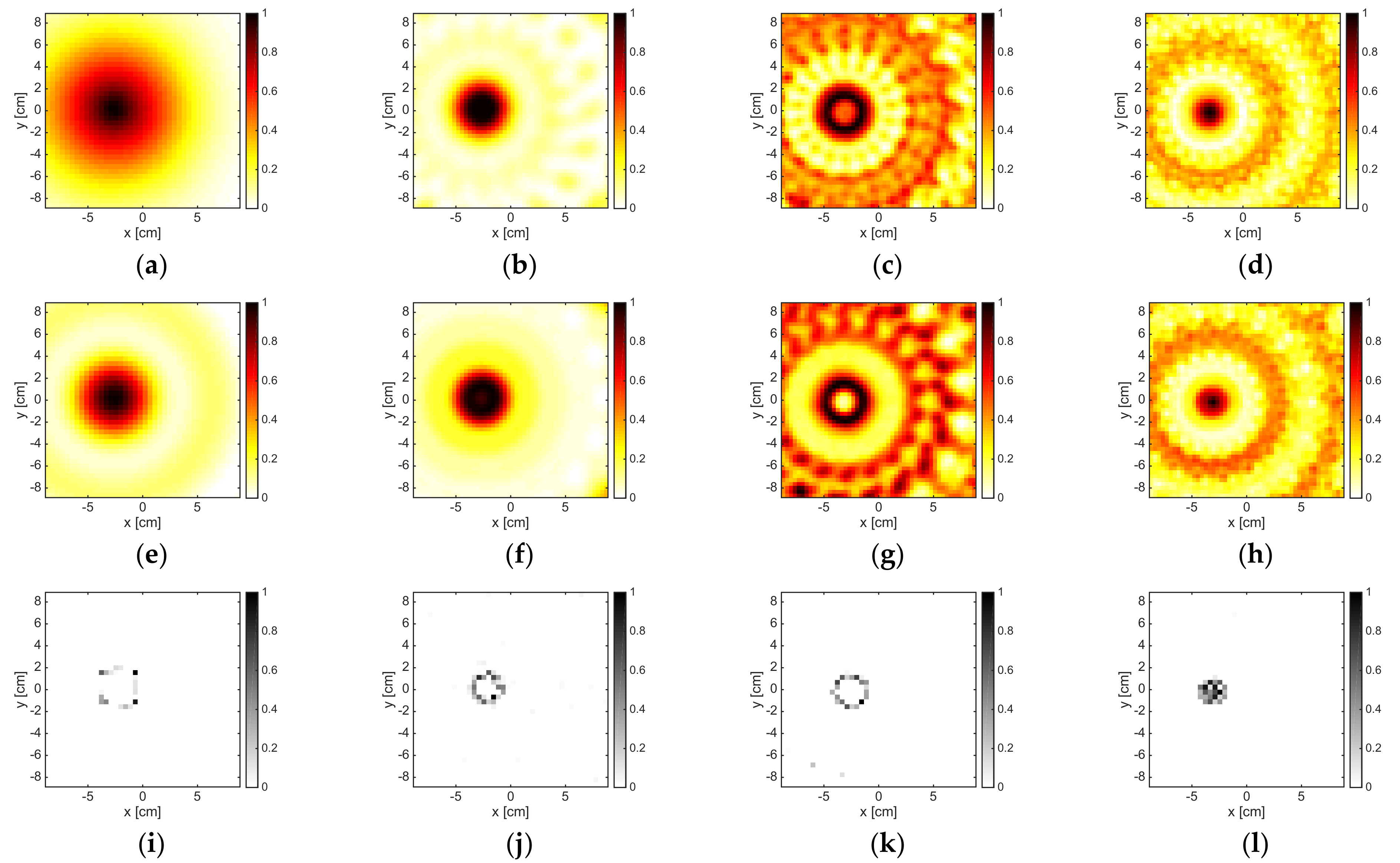
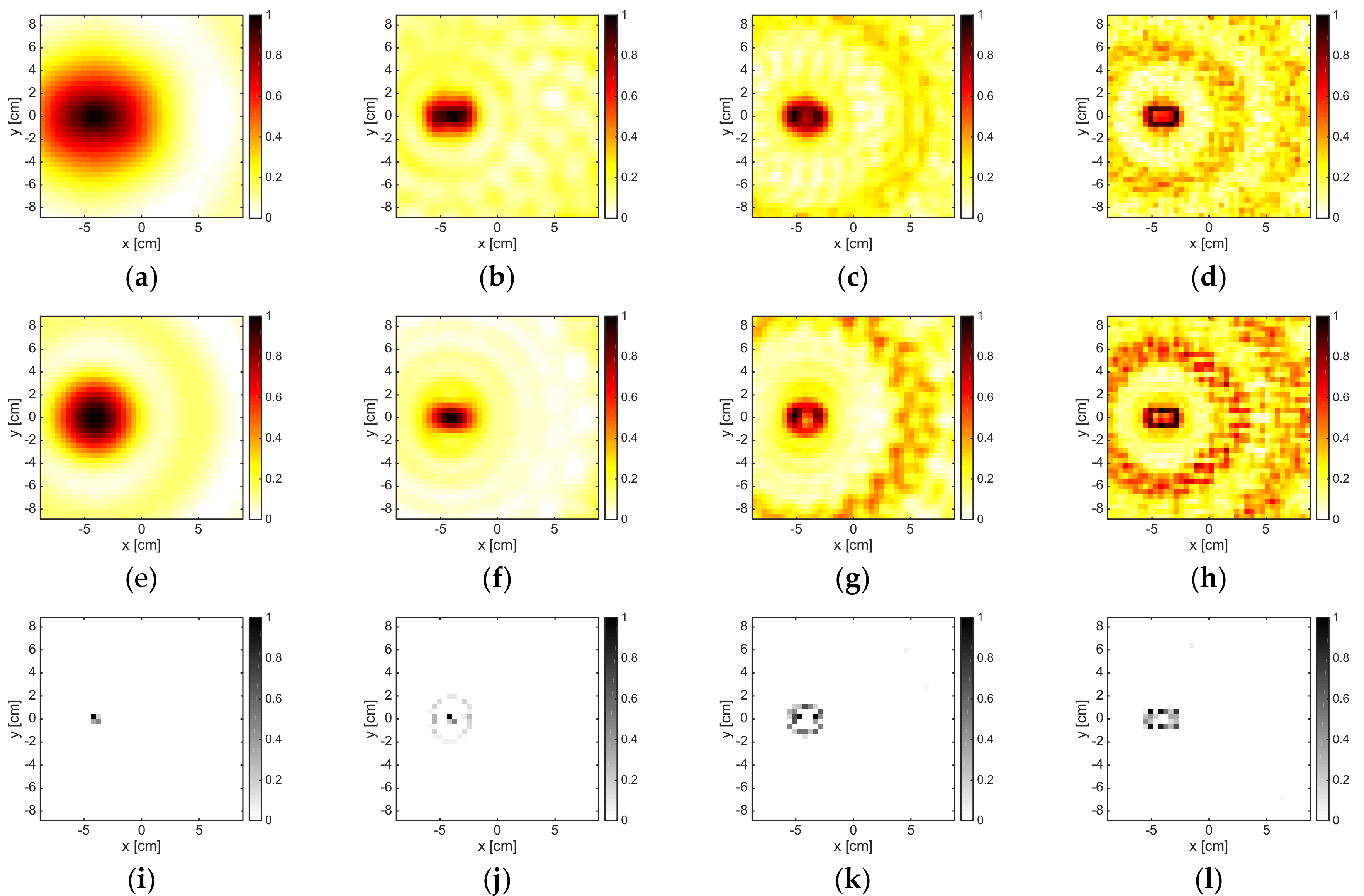
3.1. Convex Dielectric Target
- the B-IS was more accurate in estimating the radius of the cylinder and it was robust with respect to the reduction of M;
- the choice of the thresholding techniques could impact the reconstruction of the support of the target. Indeed, the dimensional errors in Table 2 were different from the one in Table 3. In particular, the Canny edge detector-based approach led to an overestimation of the radius of the cylinder, while the second approach (L = 0.8) implied more accurate estimations, as witnessed by the lower dimensional errors. Notably, the accuracy of the reconstructions when LSM and OSM were adopted strongly depended on how the indicator map was binarized and on the adopted threshold.
3.2. Convex Metallic Target
3.3. Non-Convex Metallic Target
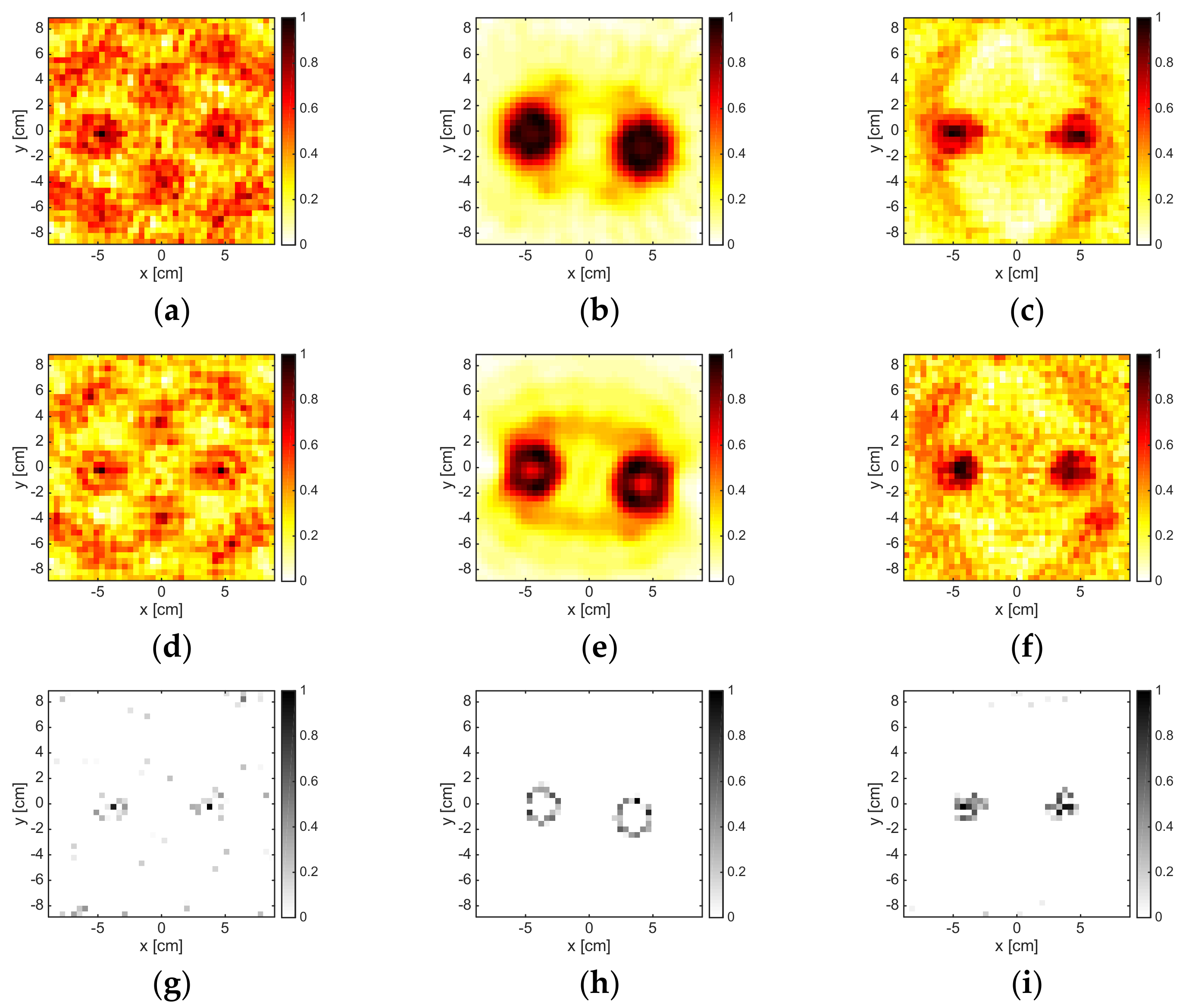
3.4. Multiple Dielectric Targets
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Colton, D.; Kress, R. Inverse Acoustic and Electromagnetic Scattering Theory, 2nd ed.; Springer: Berlin, Germany, 1998; ISBN 9781461449423. [Google Scholar]
- Pastorino, M. Microwave Imaging; John Wiley: New York, NY, USA, 2010. [Google Scholar]
- Conceicção, R.C.; Mohr, J.J.; O’Halloran, M. (Eds.) An Introduction to Microwave Imaging for Breast Cancer Detection, 1st ed.; Biological and Medical Physics, Biomedical Engineering; Springer International Publishing: Basel, Switzerland, 2016. [Google Scholar]
- Crocco, L.; Conceicção, R.C.; James, M.L.; Karanasiou, I. (Eds.) Emerging Electromagnetic Technologies for Brain Diseases Diagnostics, Monitoring and Therapy; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Bevacqua, M.T.; Bellizzi, G.G.; Crocco, L.; Isernia, T. A Method for Quantitative Imaging of Electrical Properties of Human Tissues from Only Amplitude Electromagnetic Data. Inverse Probl. 2019, 35, 025006. [Google Scholar] [CrossRef]
- Turk, A.S.; Hocaoglu, A.K.; Vertiy, A.A. (Eds.) Subsurface Sensing; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Persico, R. Introduction to Ground Penetrating Radar: Inverse Scattering and Data Processing; Wiley: Hoboken, NJ, USA, 2014. [Google Scholar]
- Bertero, M.; Boccacci, P. Introduction to Inverse Problems in Imaging; Institute of Physics: Bristol, UK, 1998. [Google Scholar]
- Cakoni, F.; Colton, D. Qualitative Methods in Inverse Scattering Theory; Springer: Berlin, Germany, 2006. [Google Scholar]
- Ammari, H.; Iakovleva, E.; Lesselier, D.; Perrusson, G. MUSIC-type electromagnetic imaging of a collection of small three-dimensional inclusions. Siam J. Sci. Comput. 2007, 29, 674–709. [Google Scholar] [CrossRef]
- Tortel, H.; Micolau, G.; Saillard, M. Decomposition of the time reversal operator for electromagnetic scattering. J. Electromagn. Waves Appl. 1999, 13, 687–719. [Google Scholar] [CrossRef]
- Colton, D.; Haddar, H.; Piana, M. The linear sampling method in inverse electromagnetic scattering theory. Inverse Probl. 2003, 19, 105–137. [Google Scholar] [CrossRef]
- Kirsch, A.; Grinberg, N.I. The Factorization Method for Inverse Problems; Oxford University Press: Oxford, UK, 2008. [Google Scholar]
- Potthast, R. A study on orthogonality sampling. Inverse Probl. 2010, 26, 074015. [Google Scholar] [CrossRef]
- Bevacqua, M.; Isernia, T. Shape reconstruction via equivalence principles, constrained inverse source problems and sparsity promotion. Prog. Electromagn. Res. 2017, 158, 37–48. [Google Scholar] [CrossRef]
- Bevacqua, M.T.; Isernia, T. Boundary Indicator for Aspect Limited Sensing of Hidden Dielectric Objects. IEEE Geosci. Remote Sens. Lett. 2018, 15, 838–842. [Google Scholar] [CrossRef]
- Donoho, D. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Franceschetti, G. Electromagnetics: Theory, Techniques, and Engineering Paradigms; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Belkebir, K.; Saillard, M. Special section: Testing inversion algorithms against experimental data. Inverse Probl. 2001, 17, 1565–2028. [Google Scholar] [CrossRef]
- Catapano, I.; Crocco, L.; Isernia, T. On simple methods for shape reconstruction of unknown scatterers. IEEE Trans. Antennas Propag. 2007, 55, 1431–1436. [Google Scholar] [CrossRef]
- Kowalski, M. Sparse regression using mixed norms. Appl. Comput. Harmon. Anal. 2009, 27, 303–324. [Google Scholar] [CrossRef]
- Fornasier, M.; Rauhut, H. Recovery algorithms for vector-valued data with joint sparsity constraints. SIAM J. Numer. Anal. 2008, 46, 577–613. [Google Scholar] [CrossRef]
- Di Donato, L.; Bevacqua, M.; Isernia, T.; Catapano, I.; Crocco, L. Improved quantitative microwave tomography by exploiting the physical meaning of the Linear Sampling Method. In Proceedings of the 5th European Conference on Antennas and Propagation, Rome, Italy, 11–15 April 2011; pp. 3828–3831. [Google Scholar]
- Bevacqua, M.T.; Palmeri, R.; Isernia, T.; Crocco, L. Physical Interpretation of the Orthogonality Sampling Method. In Proceedings of the 2nd URSI Atlantic Radio Science Meeting (AT-RASC), Gran Canaria, Spain, 28 May–1 June 2018. [Google Scholar]
- Di Donato, L.; Bevacqua, M.T.; Crocco, L.; Isernia, T. Inverse Scattering Via Virtual Experiments and Contrast Source Regularization. IEEE Trans. Antennas Propag. 2015, 63, 1669–1677. [Google Scholar] [CrossRef]
- Bucci, O.M.; Isernia, T. Electromagnetic inverse scattering: Retrievable information and measurement strategies. Radio Sci. 1997, 32, 2123–2138. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans Pattern Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar] [CrossRef] [PubMed]
- Catapano, I.; Crocco, L.; D’Urso, M.; Isernia, T. On the Effect of Support Estimation and of a New Model in 2-D Inverse Scattering Problems. IEEE Trans. Antennas Propag. 2007, 55, 1895–1899. [Google Scholar] [CrossRef]
- Devaney, A.J. Mathematical Foundations of Imaging, Tomography and Wavefield Inversion; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Crocco, L.; Di Donato, L.; Catapano, I.; Isernia, T. An Improved Simple Method for Imaging the Shape of Complex Targets. IEEE Trans. Antennas Propag. 2013, 61, 843–851. [Google Scholar] [CrossRef]
- Agarwal, K.; Chen, X.; Zhong, Y. A multipole-expansion based linear sampling method for solving inverse scattering problems. Opt. Express 2010, 18, 6366–6381. [Google Scholar] [CrossRef] [PubMed]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LSM | OSM | B-IS | |
|---|---|---|---|
| Reconstruction accuracy | medium | medium | high |
| Computational burden | low | very low | high |
| Flexibility with respect to the kind of data | low | high | high |
| Freq (GHz) | LSM | OSM | B-IS | |||
|---|---|---|---|---|---|---|
| M = 36 | M = 18 | M = 36 | M = 18 | M = 36 | M = 18 | |
| 2 | 1.4 | 0.47 | 0.97 | 0.97 | 0.18 | 0.18 |
| 6 | 0.55 | 0.55 | 0.69 | 0.74 | 0.18 | 0.11 |
| 12 | 1 | * | 1 | * | 0.18 | 0.18 |
| 16 | 1 | * | 0.18 | * | 0.18 | 0.11 |
| Freq (GHz) | LSM | OSM | B-IS | |||
|---|---|---|---|---|---|---|
| M = 36 | M = 18 | M = 36 | M = 18 | M = 36 | M = 18 | |
| 2 | 0.37 | 0.32 | 0.11 | 0.11 | 0.18 | 0.18 |
| 6 | 0.22 | 0.09 | 0.27 | 0.28 | 0.18 | 0.11 |
| 12 | 0.47 | * | 0.47 | * | 0.18 | 0.18 |
| 16 | 0.03 | * | 0.47 | * | 0.18 | 0.11 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bevacqua, M.T.; Palmeri, R. Qualitative Methods for the Inverse Obstacle Problem: A Comparison on Experimental Data. J. Imaging 2019, 5, 47. https://doi.org/10.3390/jimaging5040047
Bevacqua MT, Palmeri R. Qualitative Methods for the Inverse Obstacle Problem: A Comparison on Experimental Data. Journal of Imaging. 2019; 5(4):47. https://doi.org/10.3390/jimaging5040047
Chicago/Turabian StyleBevacqua, Martina T., and Roberta Palmeri. 2019. "Qualitative Methods for the Inverse Obstacle Problem: A Comparison on Experimental Data" Journal of Imaging 5, no. 4: 47. https://doi.org/10.3390/jimaging5040047
APA StyleBevacqua, M. T., & Palmeri, R. (2019). Qualitative Methods for the Inverse Obstacle Problem: A Comparison on Experimental Data. Journal of Imaging, 5(4), 47. https://doi.org/10.3390/jimaging5040047