
Quantitative Assessment and Analysis of Fish Behavior in Closed Systems Using Information Entropy



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Information and Information Entropy
- Case 1
- Case 2
- Case 1:
- Case 2:
2.2. Method for Calculating Information Entropy
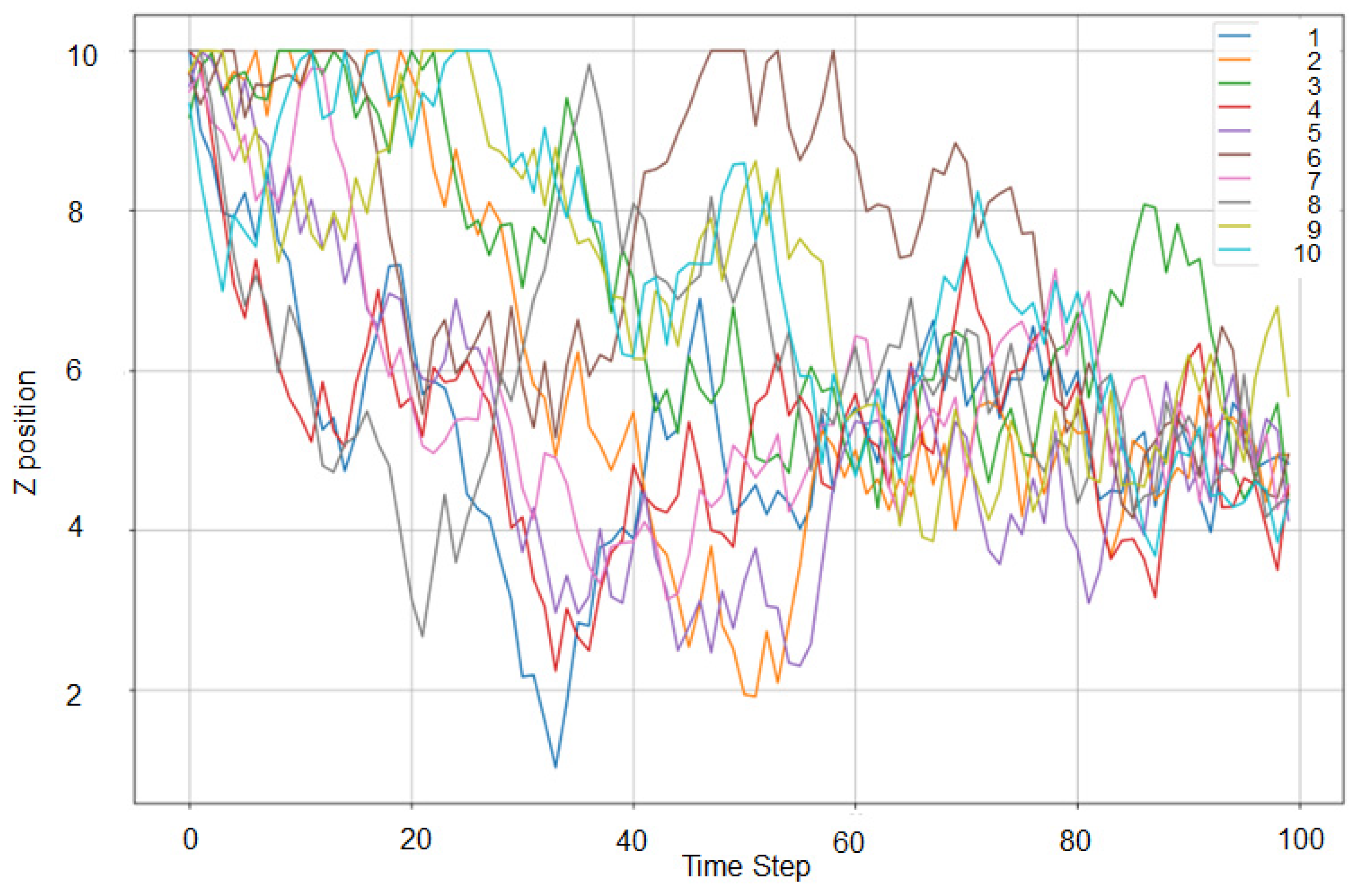
- Step 1. Data Preprocessing: The position data of the individuals that comprise the fish shoal are acquired and the position information for each time step is extracted.
- Step 2. Data Discretization: Divide the entire space over which the fishes can move into a mesh grid. This grid serves as a spatial unit for dividing the space into smaller cells.
- Step 3. Calculation of Fish Presence Probability in Each Cell at Each Timestep: For each timestep, calculate the probability of fish presence in each cell. This is achieved by counting the number of fish in the i-th cell and dividing by the total number of fish in the system at that time.
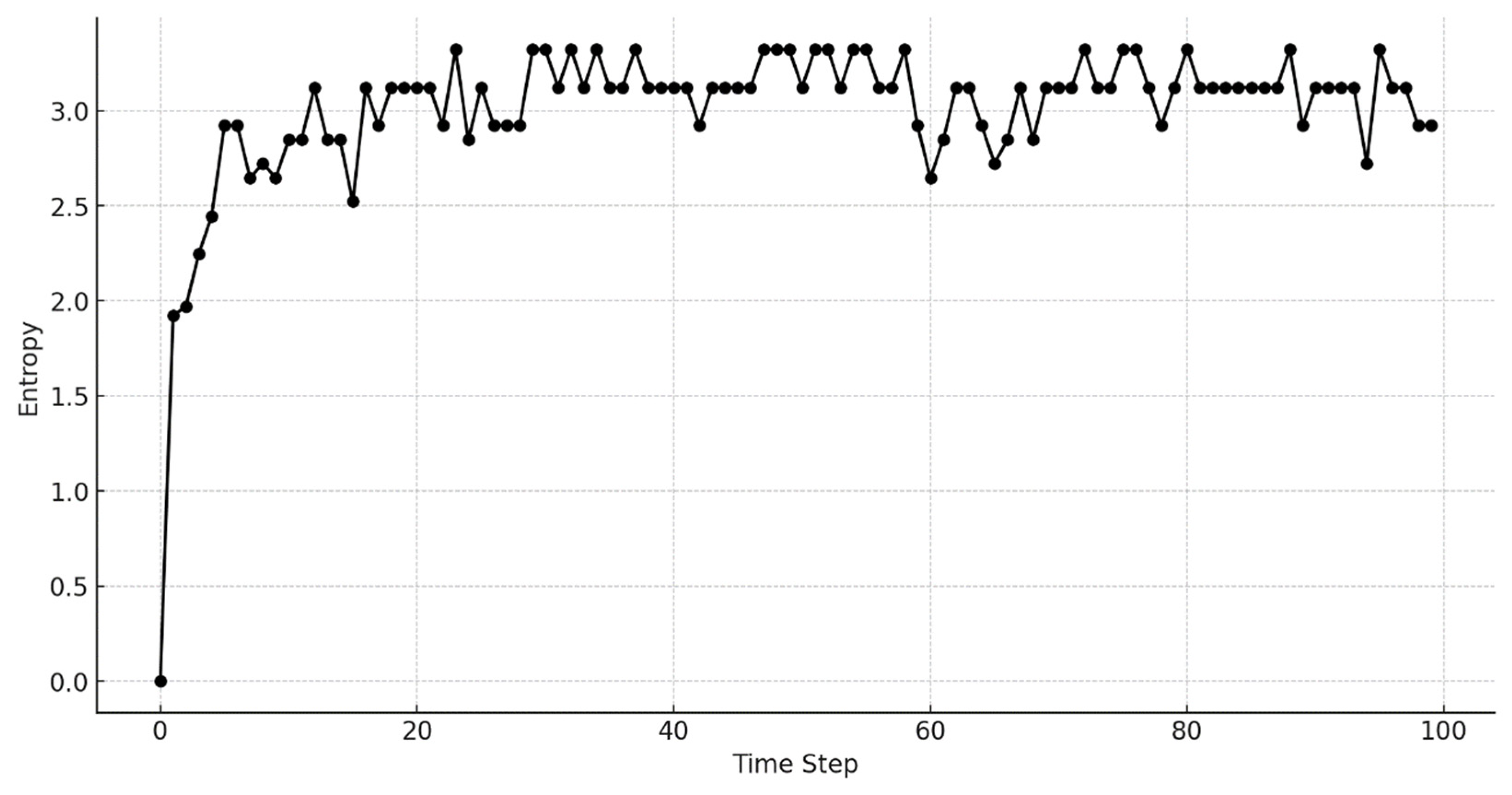
- Step 4. Calculation of Information Entropy at Each Timestep: Calculate the information entropy from the probability distribution at each timestep. The information entropy is calculated using the following formula:where n is the total number of cells in the mesh grid, is the probability of fish presence in the i-th cell at time t.
- Step 5. Plotting Information Entropy Over Time: Calculate the information entropy at each timestep and plot the changes in information entropy over time to visualize how the uncertainty and predictability of the data change over time.
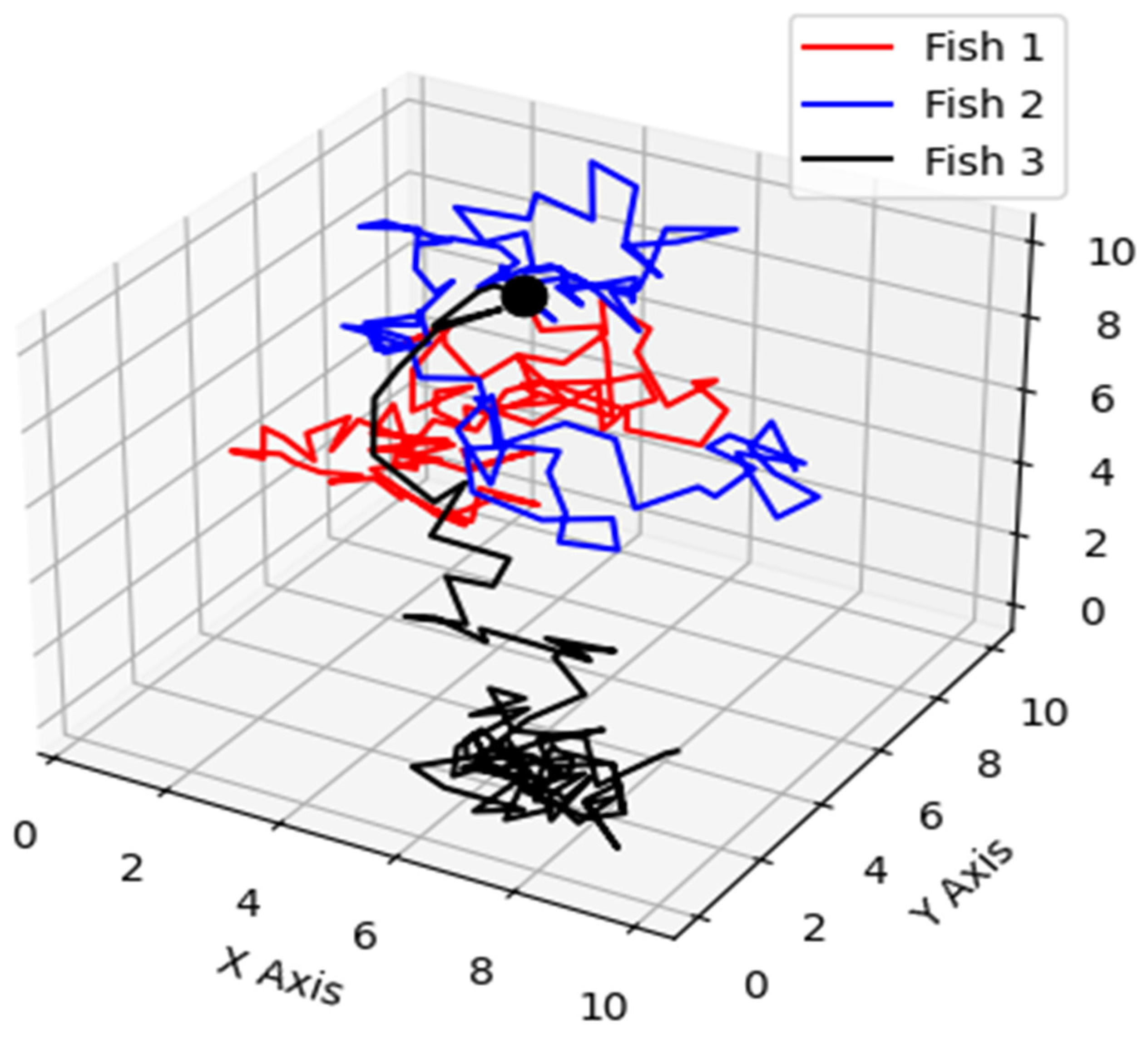
2.3. Fish Shoal Behavior Model
3. Results and Discussion
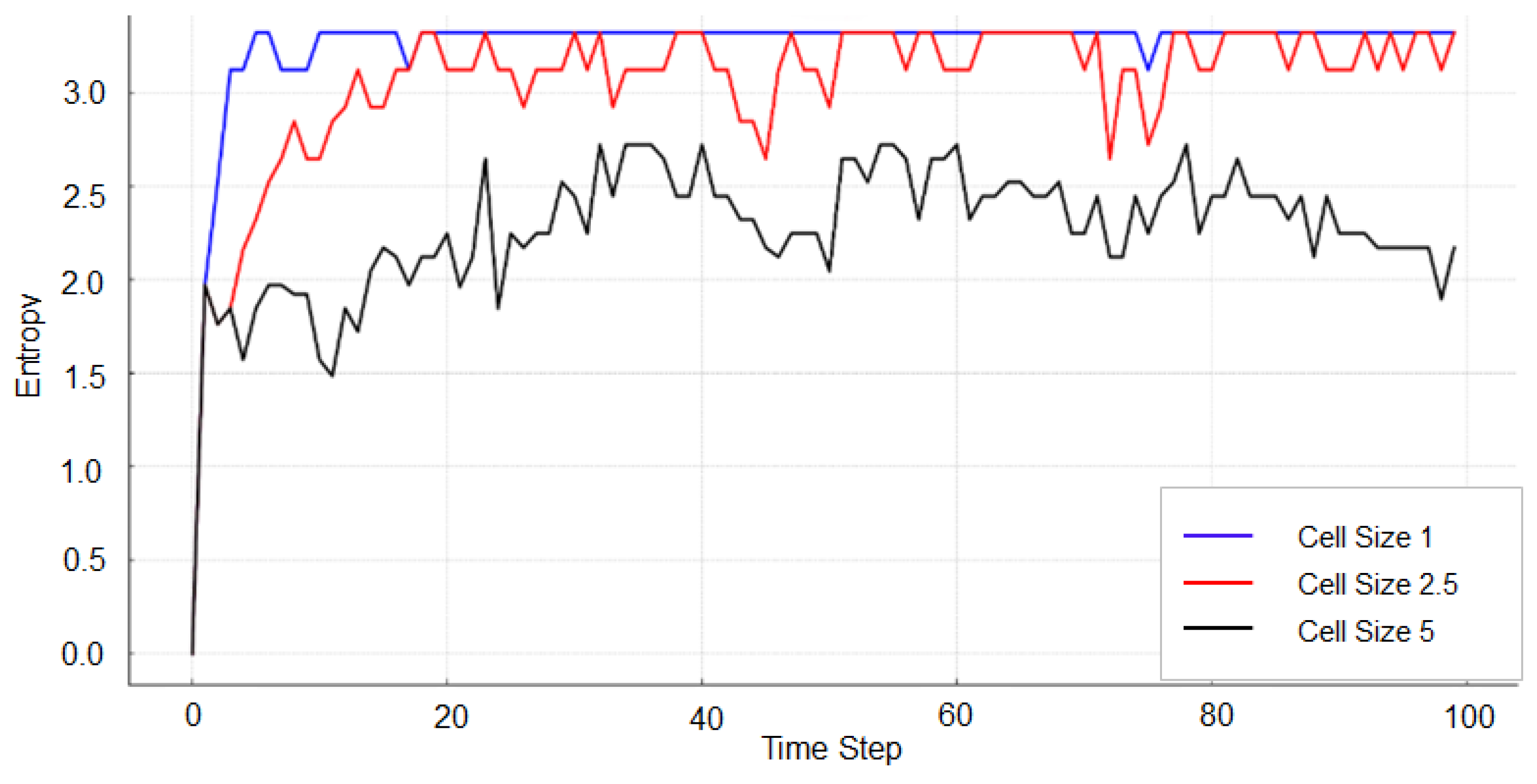
3.1. (Analysis-1) Selection of the Appropriate Cell Size
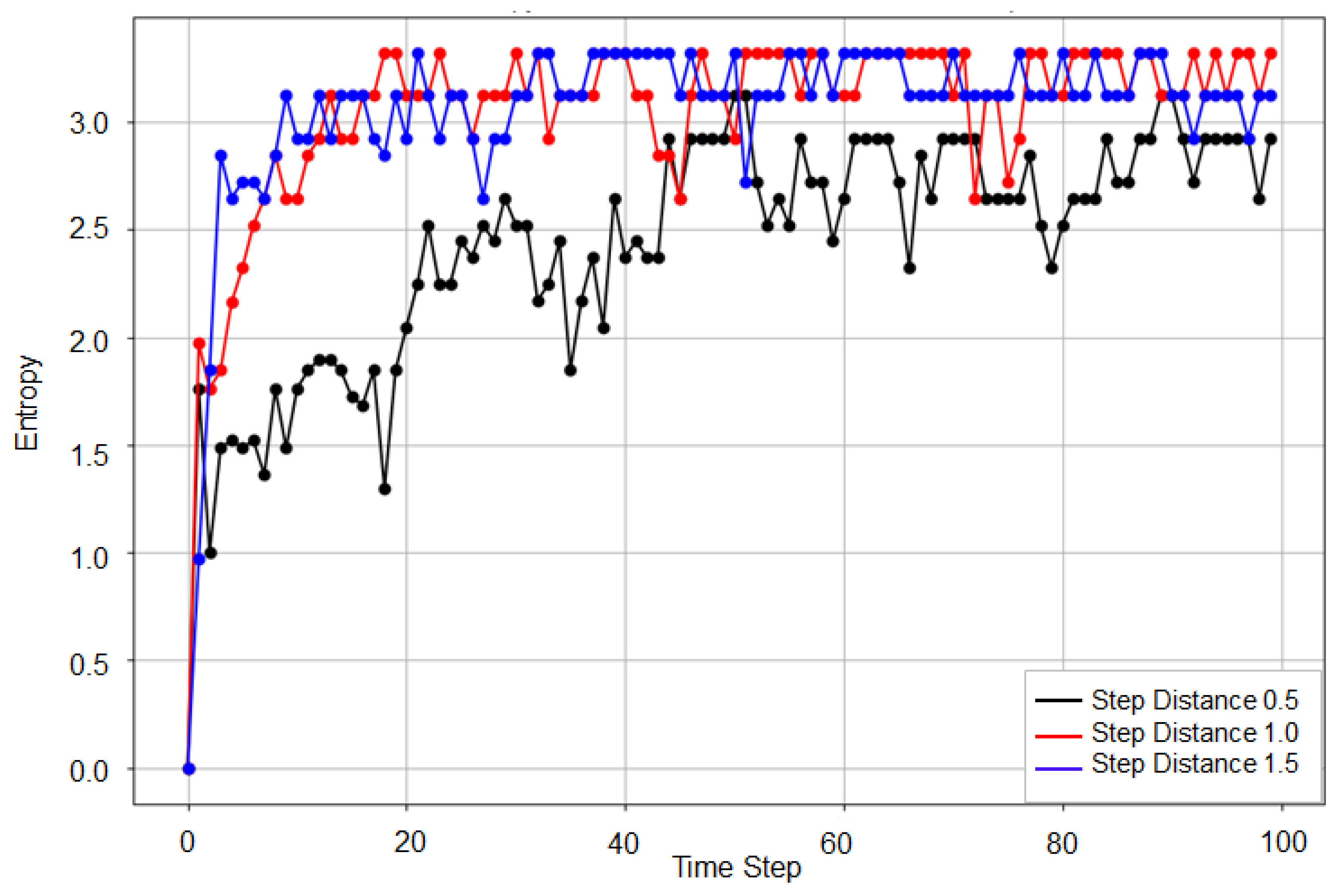
3.2. (Analysis-2) Sensitivity Analysis on Swimming Speed
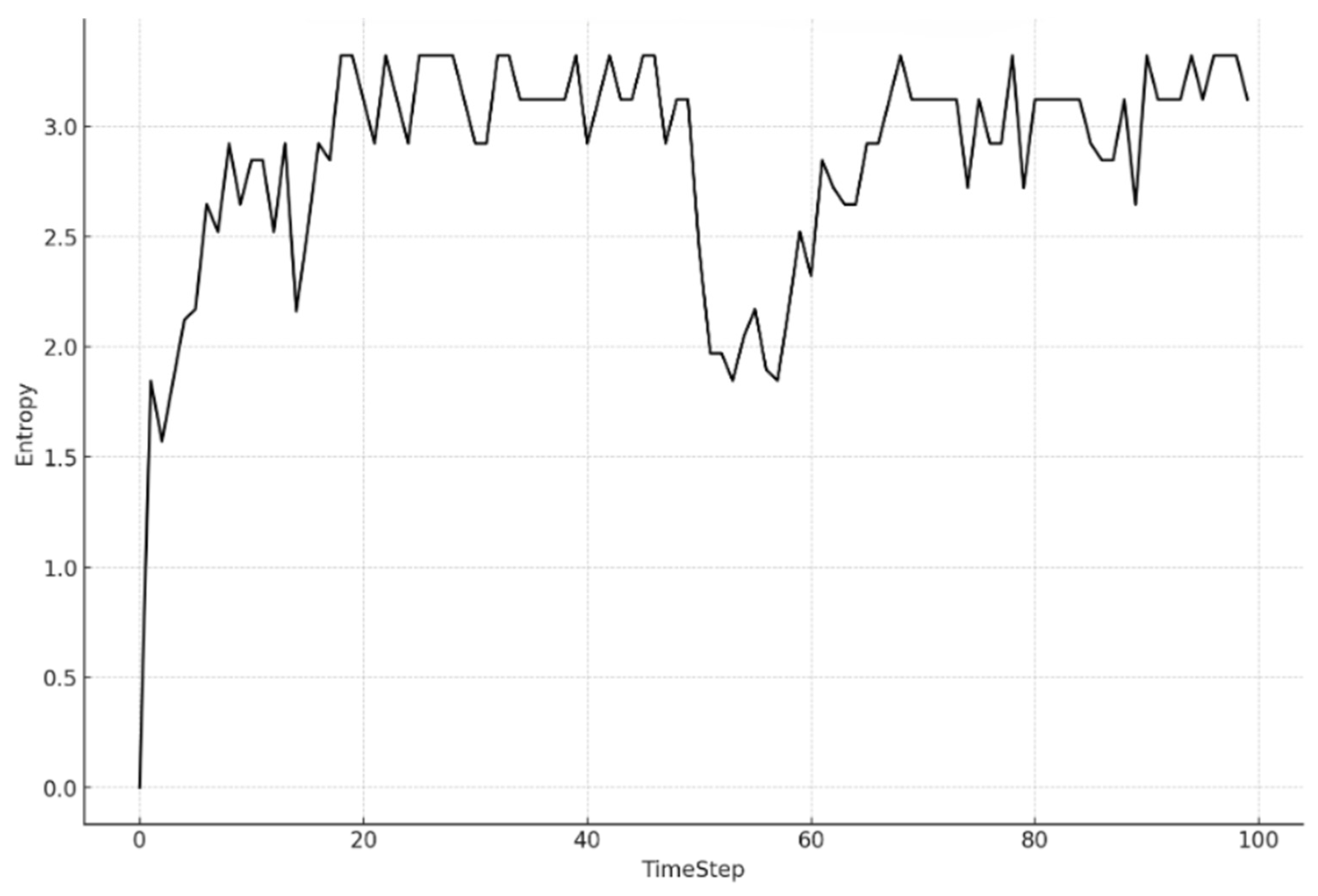
3.3. (Analysis-3) Behavioral Changes during Feeding and Entropy
3.4. (Analysis-4) Behavioral Changes and Entropy in Response to External Stimuli
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zheng, M.; Kashimori, Y.; Hoshino, O.; Fujita, K.; Kambara, T. Behavior pattern (innate action) of individuals in fish schools generating efficient collective evasion from predation. J. Theor. Biol. 2005, 235, 153–167. [Google Scholar] [CrossRef] [PubMed]
- Gazzola, M.; Tchieu, A.; Alexeev, D.; Brauer, A.; Koumoutsakos, P. Learning to school in the presence of hydrodynamic interactions. J. Fluid Mech. 2015, 789, 726–749. [Google Scholar] [CrossRef]
- Thilsted, S.; Thorne-Lyman, A.; Webb, P.; Bogard, J.; Subasinghe, R.; Phillips, M.; Allison, E. Sustaining healthy diets: The role of capture fisheries and aquaculture for improving nutrition in the post-2015 era. Food Policy 2016, 61, 126–131. [Google Scholar] [CrossRef]
- Embling, C.; Sharples, J.; Armstrong, E.; Palmer, M.; Scott, B. Fish behaviour in response to tidal variability and internal waves over a shelf sea bank. Prog. Oceanogr. 2013, 117, 106–117. [Google Scholar] [CrossRef]
- Stöcker, S. Models for tuna school formation. Math. Biosci. 1999, 156, 167–190. [Google Scholar] [CrossRef]
- Gebremedhin, S.; Bruneel, S.; Getahun, A.; Anteneh, W.; Goethals, P. Scientific Methods to Understand Fish Population Dynamics and Support Sustainable Fisheries Management. Water 2021, 13, 574. [Google Scholar] [CrossRef]
- Partridge, B.L. The structure and function of fish schools. Sci. Am. 1982, 246, 114–123. [Google Scholar] [CrossRef]
- Suzuki, K.; Torisawa, S.; Takagi, T. Mathematical and Experimental Analysis of Schooling Behavior During Growth in Juvenile Chub Mackerel: Considerations of Population Density and Space Limitation. In Proceedings of the ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10 June 2007. [Google Scholar] [CrossRef]
- Killen, S.; Marras, S.; Steffensen, J.; McKenzie, D. Aerobic capacity influences the spatial position of individuals within fish schools. Proc. R. Soc. B Biol. Sci. 2012, 279, 357–364. [Google Scholar] [CrossRef]
- Weihs, D. Hydromechanics of Fish Schooling. Nature 1973, 241, 290–291. [Google Scholar] [CrossRef]
- Aoki, I. A simulation study on the schooling mechanism in fish. Nippon. Suisan Gakkaishi 1982, 48, 1081–1088. [Google Scholar] [CrossRef]
- Reynolds, C.W. Flocks, herds and schools: A distributed behavioral model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 27–31 July 1987; pp. 25–34. [Google Scholar]
- Bhooshan, N. The Simulation of the Movement of Fish Schools; Undergraduate Report; Institute of Systems Research University of Maryland: College Park, MD, USA, 3 August 2000. [Google Scholar]
- Saila, S.B. Ecosystem Models of Fishing Effects: Present Status and a Suggested Future Paradigm. In The Future of Fisheries Science in North America; Beamish, R.J., Rothschild, B.J., Eds.; Fish & Fisheries Series; Springer: Dordrecht, The Netherlands, 2009; Volume 31, pp. 245–253. [Google Scholar] [CrossRef]
- Gyllingberg, L.; Birhane, A.; Sumpter, D.J. The lost art of mathematical modelling. Math. Biosci. 2023, 362, 109033. [Google Scholar] [CrossRef] [PubMed]
- Shannon, C.E.; Weaver, W. The Mathematical Theory of Communication; University of Illinois Press: Urbana, IL, USA, 1964; pp. 3–115. [Google Scholar]
- Jiang, F.; Sui, Y.; Cao, C. An information entropy-based approach to outlier detection in rough sets. Expert Syst. Appl. 2010, 37, 6338–6344. [Google Scholar] [CrossRef]
- Zhangchun, T.; Zhenzhou, L.; Biao, J.; Wang, P.; Feng, Z. Entropy-Based Importance Measure for Uncertain Model Inputs. AIAA J. 2013, 51, 2319–2334. [Google Scholar] [CrossRef]
- Gong, W.; Yang, D.; Gupta, H.; Nearing, G. Estimating information entropy for hydrological data: One-dimensional case. Water Resour. Res. 2014, 50, 5003–5018. [Google Scholar] [CrossRef]
- Ulanowlcz, R.; Norden, J. Symmetrical overhead in flow networks. Int. J. Syst. Sci. 1990, 21, 429–437. [Google Scholar] [CrossRef]
- Pennekamp, F.; Iles, A.; Garland, J.; Brennan, G.; Brose, U.; Gaedke, U.; Jacob, U.; Kratina, P.; Matthews, B.; Munch, S.; et al. The intrinsic predictability of ecological time series and its potential to guide forecasting. bioRxiv 2018. [Google Scholar] [CrossRef]
- Majerník, V. Entropy—A Universal Concept in Sciences. Nat. Sci. 2014, 6, 552–564. [Google Scholar] [CrossRef]
- Kala, Z. Quantification of Model Uncertainty Based on Variance and Entropy of Bernoulli Distribution. Mathematics 2022, 10, 3980. [Google Scholar] [CrossRef]
- Seuront, L.; Schmitt, F.; Brewer, M.; Strickler, J.; Souissi, S. From random walk to multifractal random walk in zooplankton swimming behavior. Zool. Stud. 2004, 43, 498–510. [Google Scholar]
- Faugeras, B.; Maury, O. Modeling fish population movements: From an individual-based representation to an advection-diffusion equation. J. Theor. Biol. 2007, 247, 837–848. [Google Scholar] [CrossRef]
- Kadota, M.; Torisawa, S.; Tsutomu, T.; Komeyama, K.; Fukuda, H. Analysis of juvenile tuna movements as correlated random walk. Fish. Sci. 2011, 77, 993–998. [Google Scholar] [CrossRef]
- Pagès, J.; Bartumeus, F.; Romero, J.; Alcoverro, T. The scent of fear makes sea urchins go ballistic. Mov. Ecol. 2021, 9, 50. [Google Scholar] [CrossRef] [PubMed]
- Steckbauer, A.; Díaz-Gil, C.; Alós, J.; Catalán, I.; Duarte, M. Predator Avoidance in the European Seabass After Recovery From Short-Term Hypoxia and Different CO2 Conditions. Front. Mar. Sci. 2018, 5, 350. [Google Scholar] [CrossRef]
- Abe, M.; Kasada, M. Optimal Random Avoidance Strategy in Prey-Predator Interactions. bioRxiv 2020, 2020.03.04.976076. [Google Scholar] [CrossRef]
- Nuno, A.; Guiet, J.; Baranek, B.; Bianchi, D. Patterns and drivers of the diving behavior of large pelagic predators. bioRxiv 2022, 12.27.521953. [Google Scholar] [CrossRef]
- Morad, N. Modeling Methods in Clustering Analysis for Time Series Data. Open J. Stat. 2020, 10, 565–580. [Google Scholar] [CrossRef]
- McDowell, I.; Manandhar, D.; Vockley, C.; Schmid, A.; Reddy, T.; Engelhardt, B. Clustering gene expression time series data using an infinite Gaussian process mixture model. PLoS Comput. Biol. 2018, 14, e1005896. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kadota, M.; Torisawa, S.; Takagi, T. Quantitative Assessment and Analysis of Fish Behavior in Closed Systems Using Information Entropy. Fishes 2024, 9, 224. https://doi.org/10.3390/fishes9060224
Kadota M, Torisawa S, Takagi T. Quantitative Assessment and Analysis of Fish Behavior in Closed Systems Using Information Entropy. Fishes. 2024; 9(6):224. https://doi.org/10.3390/fishes9060224
Chicago/Turabian StyleKadota, Minoru, Shinsuke Torisawa, and Tsutomu Takagi. 2024. "Quantitative Assessment and Analysis of Fish Behavior in Closed Systems Using Information Entropy" Fishes 9, no. 6: 224. https://doi.org/10.3390/fishes9060224
APA StyleKadota, M., Torisawa, S., & Takagi, T. (2024). Quantitative Assessment and Analysis of Fish Behavior in Closed Systems Using Information Entropy. Fishes, 9(6), 224. https://doi.org/10.3390/fishes9060224