
Development of Fishcake Gripping and Classification Automation Process Based on Suction Shape Transformation Gripper


Abstract
:1. Introduction
2. Related Works
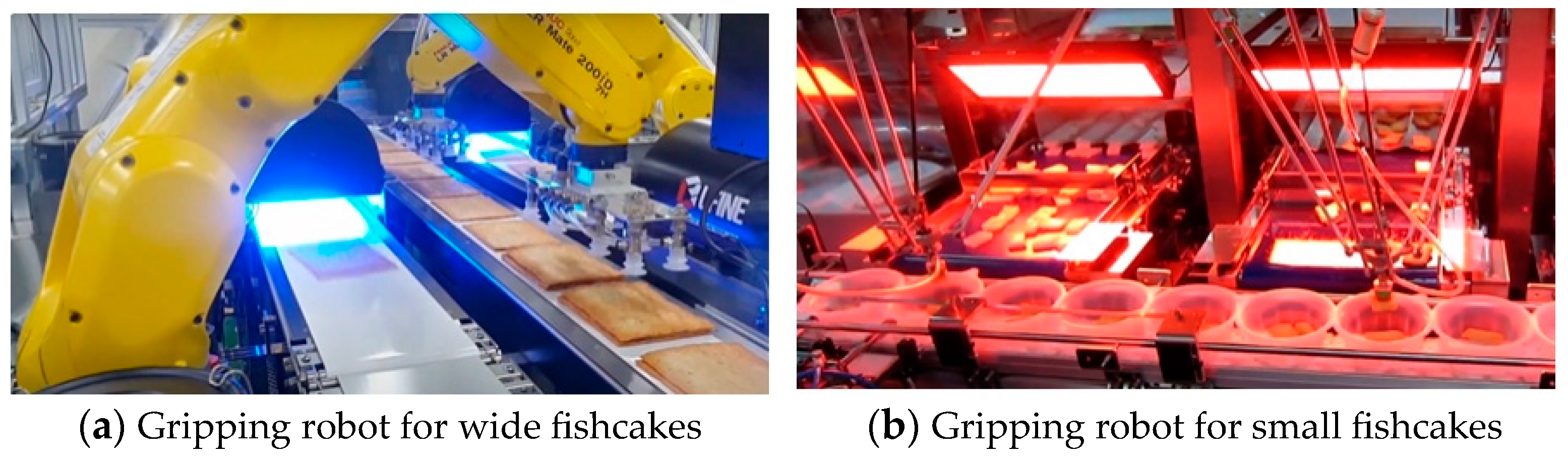
2.1. Gripping Object
2.2. Object Detection and Classification
3. Suction Shape Transformation Gripper of the Vacuum Ejector Type
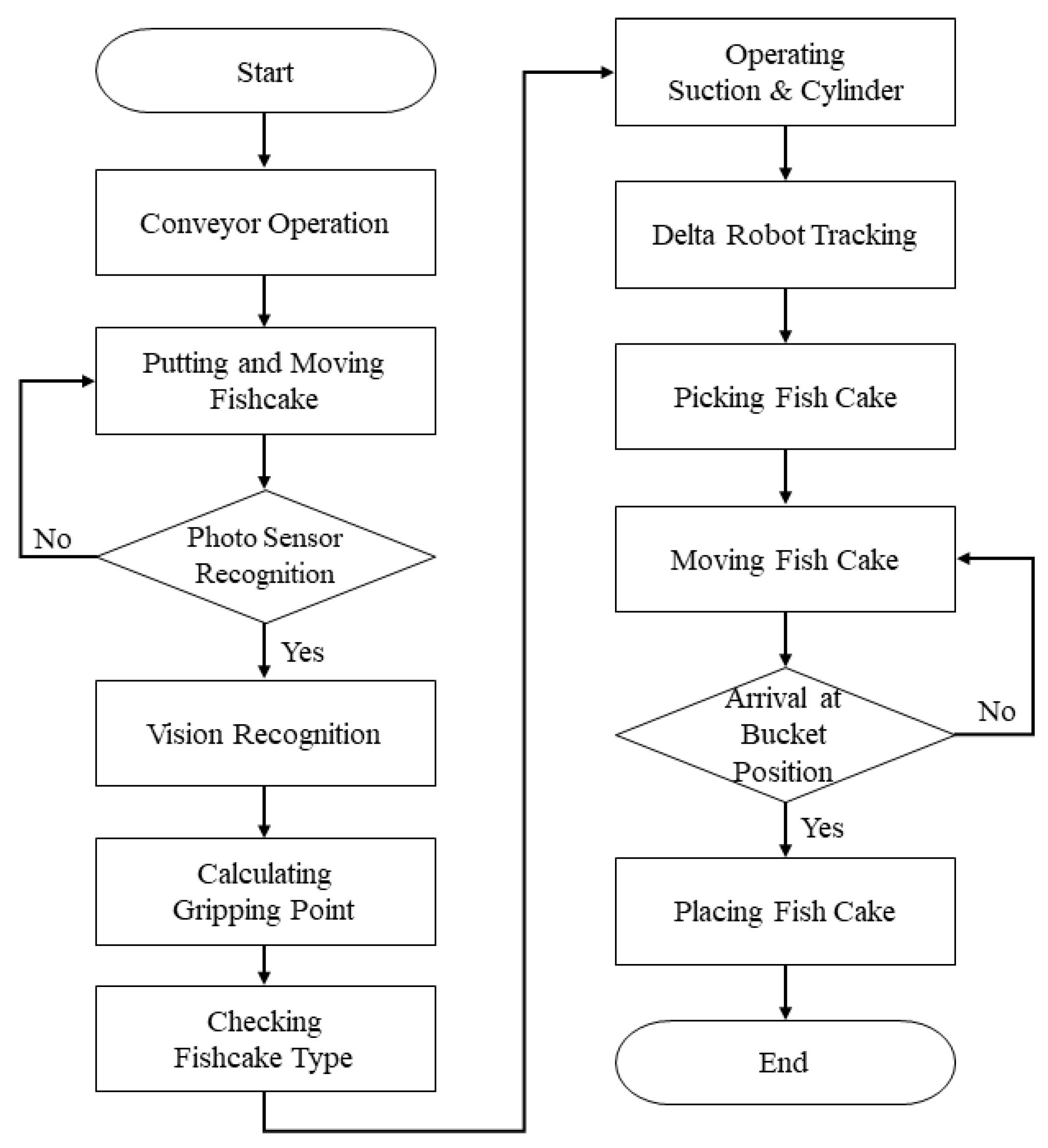
4. Fishcake Automation Process
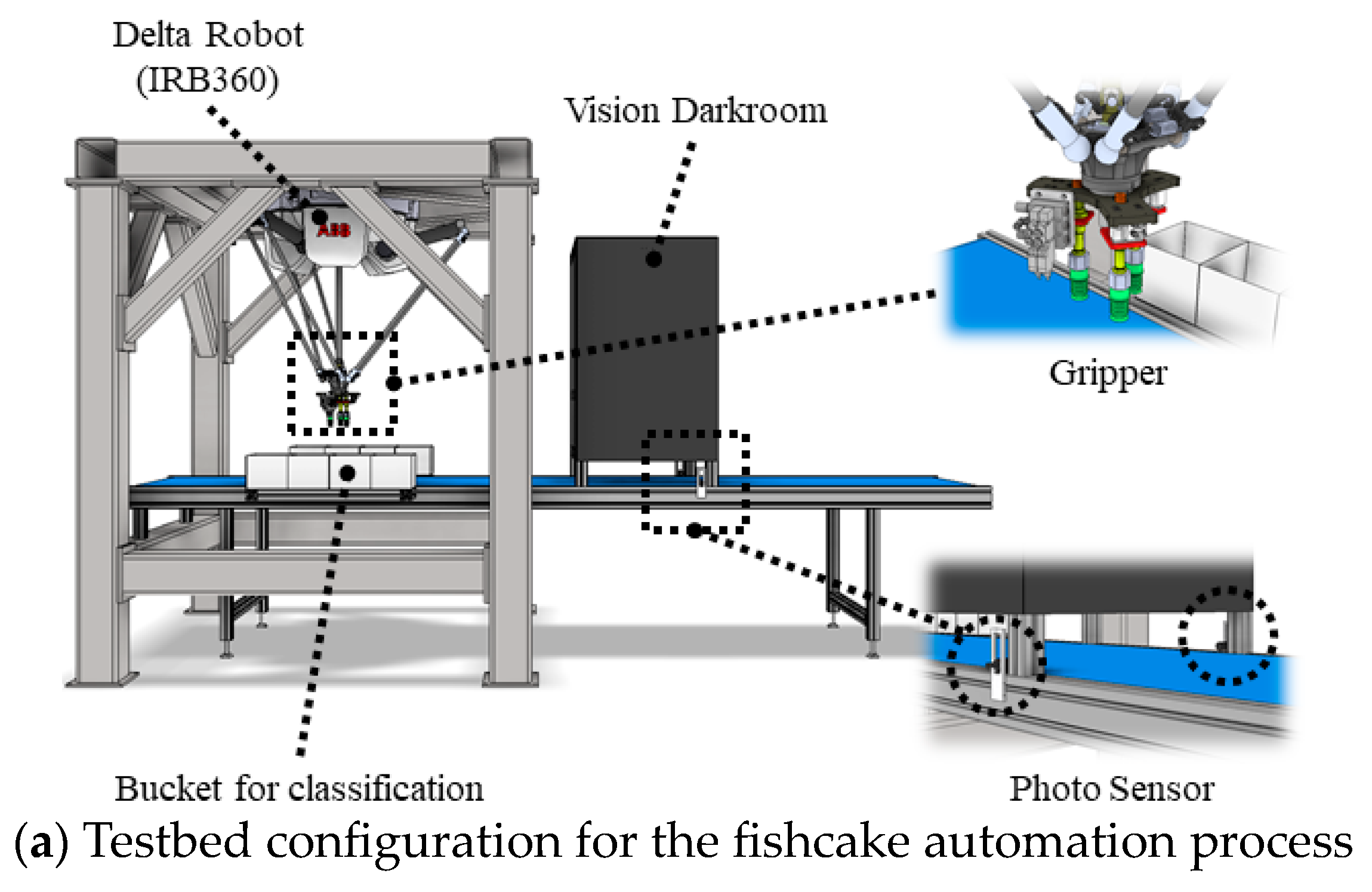
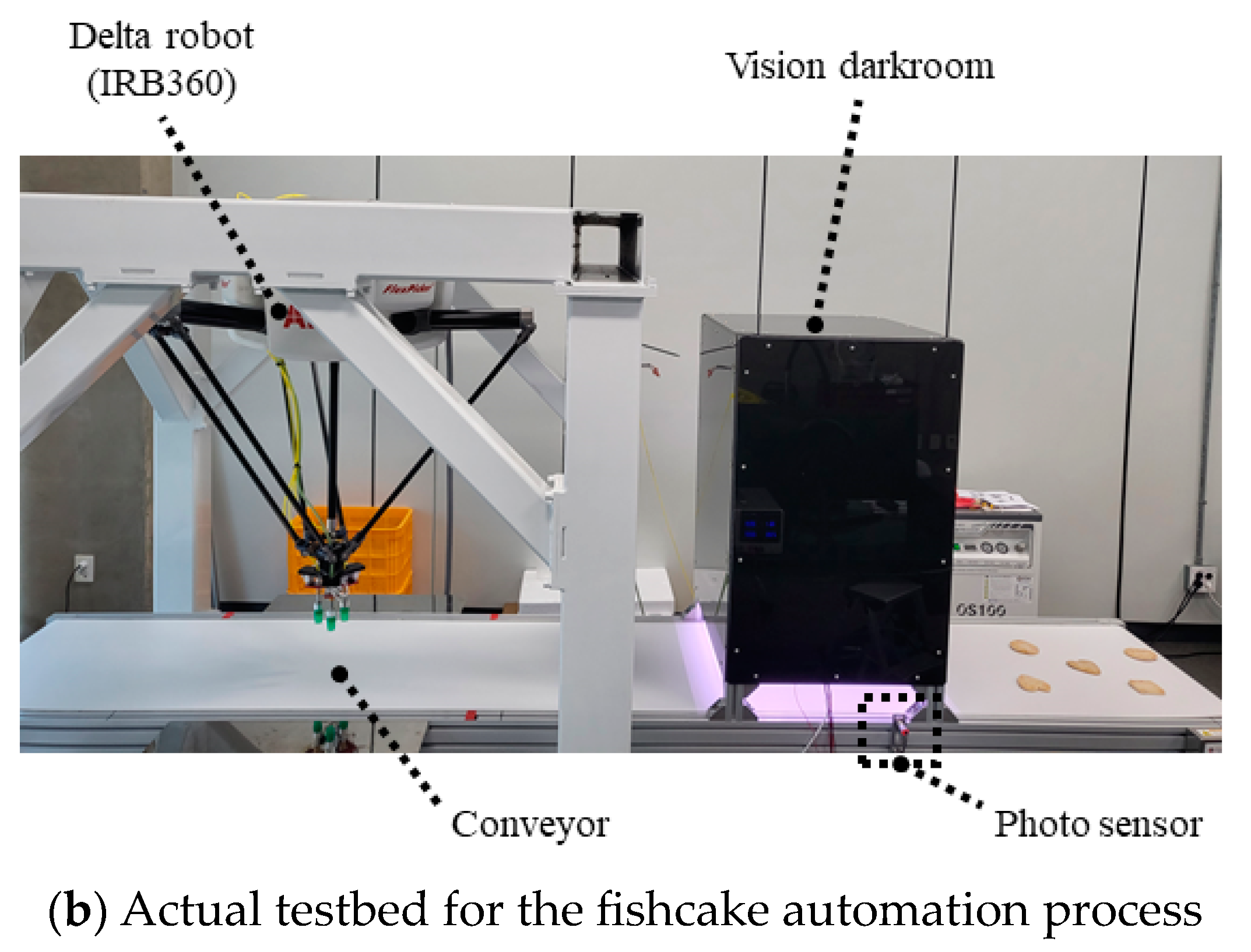
4.1. Automation Process Testbed
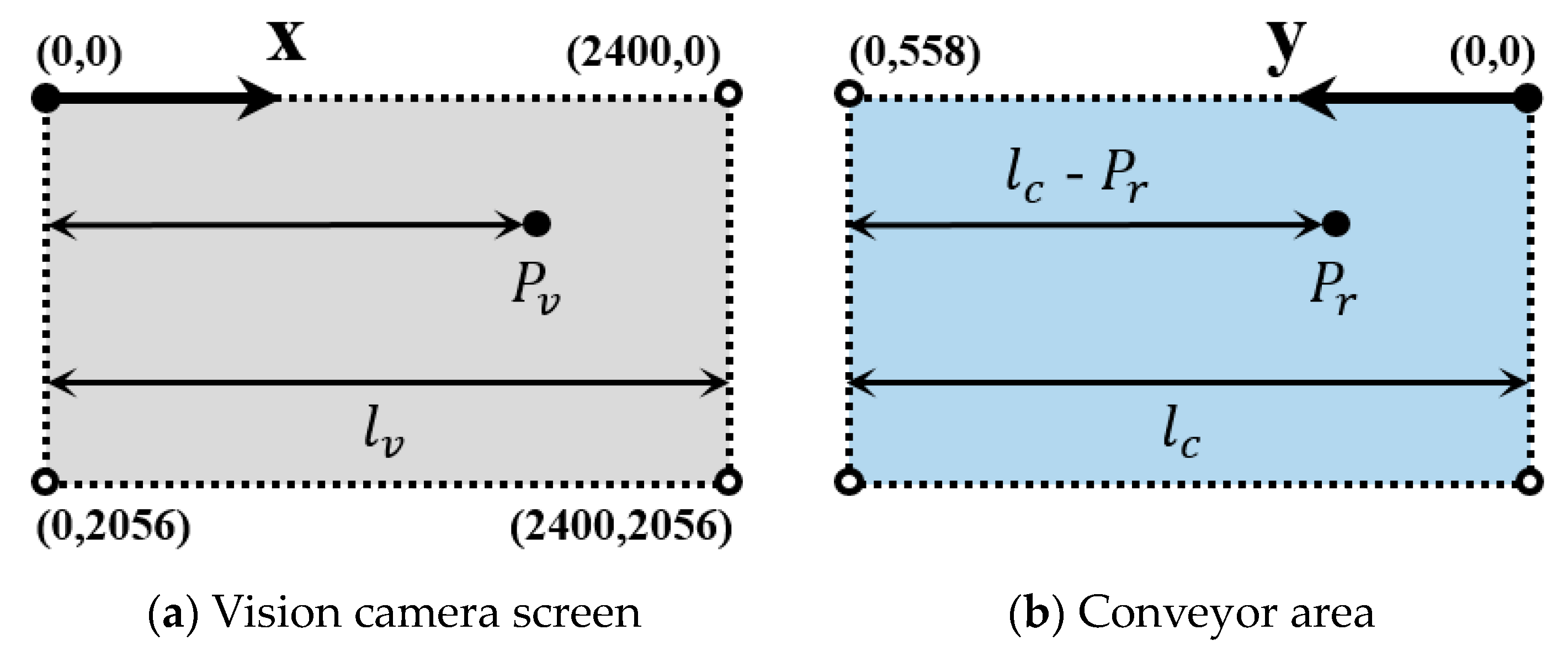
4.2. Image Recognition for Fishcake Shape and Position
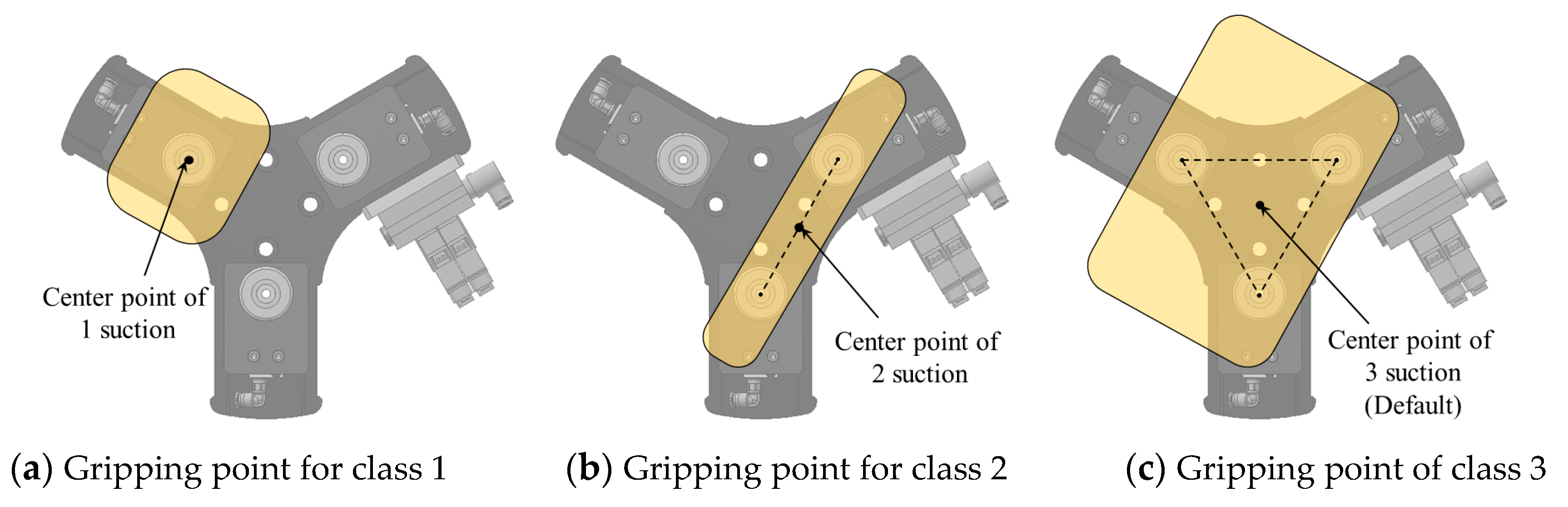
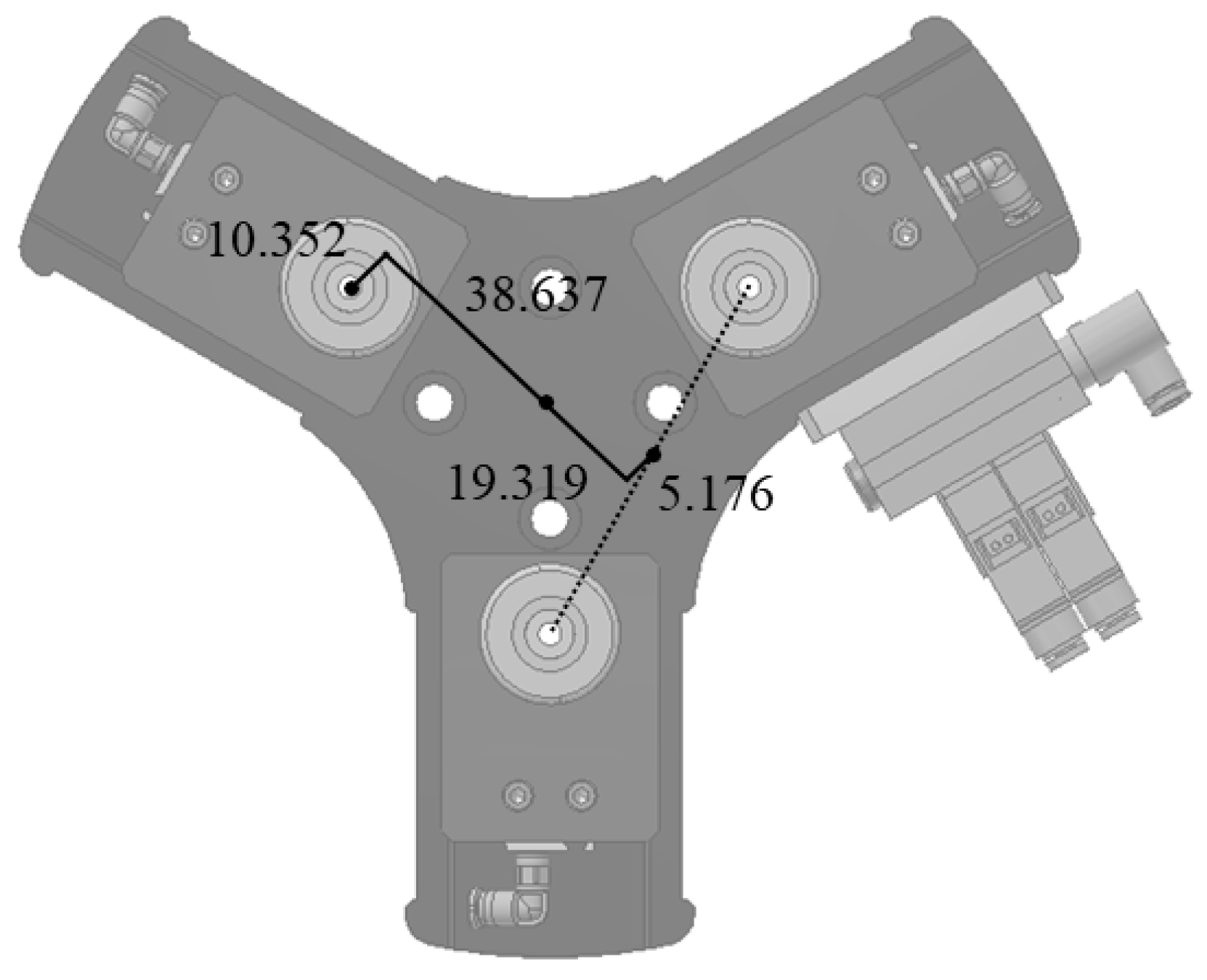
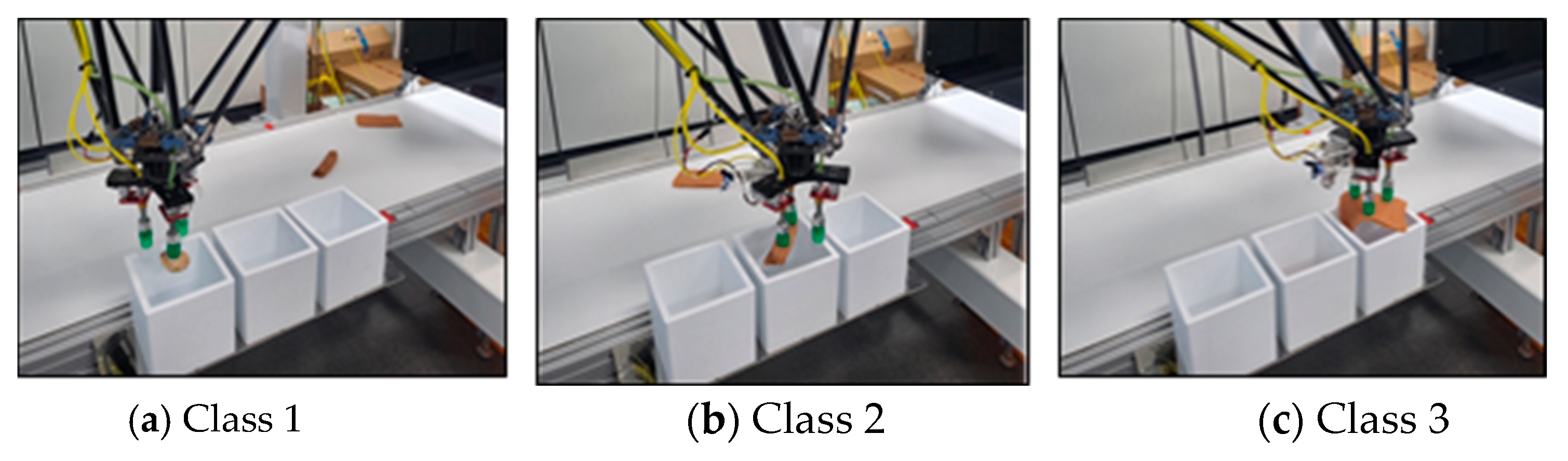
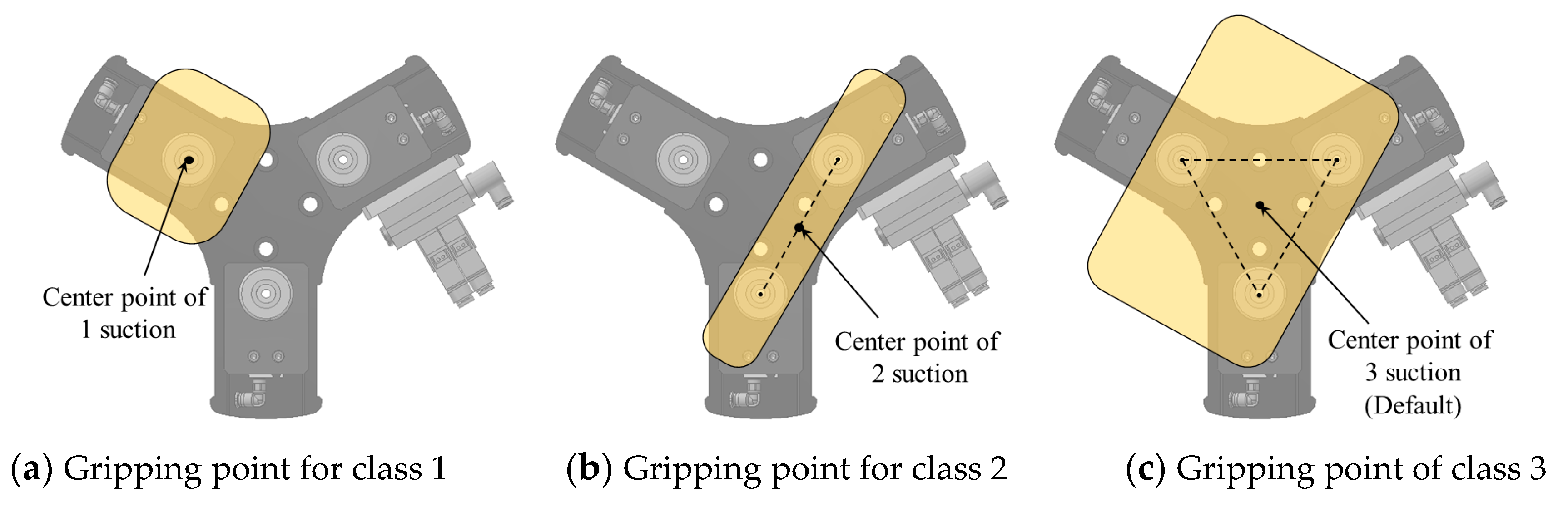
4.3. Gripper Suction Shape Transformation According to Fishcake Shape
5. Gripping and Classification of Fishcakes
5.1. Fishcake Gripping and Classification Test
5.2. Analysis of Test Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ministry of Oceans and Fisheries. 2nd Basic Plan for the Development of Marine Fisheries Science and Technology; Ministry of Oceans and Fisheries: Sejong City, Republic of Korea, 2023. [Google Scholar]
- Samho Fishcake-Making Process. Available online: https://www.youtube.com/watch?v=LagD1-bY_DY (accessed on 31 December 2021).
- Wang, Z.; Torigoe, Y.; Hirai, S. A Prestressed Soft Gripper: Design, Modeling, Fabrication, and Tests for Food Handling. IEEE Robot. Autom. Lett. 2017, 2, 1909–1916. [Google Scholar] [CrossRef]
- Liu, J.; Low, J.H.; Han, Q.Q.; Lim, M.; Lu, D.; Yeow, C.H.; Liu, Z. Simulation Data Driven Design Optimization for Reconfigurable Soft Gripper System. IEEE Robot. Autom. Lett. 2022, 7, 5803–5810. [Google Scholar] [CrossRef]
- Zulkefle, M.H.; Abdul Ghani, A.S.A. Investigation of Rectangular Shape Object Detection and Classification Using Python. Mekatronika 2022, 4, 32–39. [Google Scholar] [CrossRef]
- Ismail Fawaz, H.; Forestier, G.; Weber, J.; Idoumghar, L.; Muller, P.A. Deep Learning for Time Series Classification: A Review. Data Min. Knowl. Discov. 2019, 33, 917–963. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar] [CrossRef]
- Milojević, A.; Linß, S.; Handroos, H. Soft Robotic Compliant Two-Finger Gripper Mechanism for Adaptive and Gentle Food Handling. IEEE Int. Conf. Soft Robot. 2021, 163–168. [Google Scholar] [CrossRef]
- Low, J.H.; Khin, P.M.; Han, Q.Q.; Yao, H.; Teoh, Y.S.; Zeng, Y.; Li, S.; Liu, J.; Liu, Z.; Valdivia y Alvarado, P.; et al. Sensorized Reconfigurable Soft Robotic Gripper System for Automated Food Handling. IEEE/ASME Trans. Mechatron. 2022, 27, 3232–3243. [Google Scholar] [CrossRef]
- Ishikawa, R.; Hamaya, M.; Von Drigalski, F.; Tanaka, K.; Hashimoto, A. Learning by Breaking: Food Fracture Anticipation for Robotic Food Manipulation. IEEE Access 2022, 10, 99321–99329. [Google Scholar] [CrossRef]
- Chen, C.C.; Lan, C.C. An Accurate Force Regulation Mechanism for High-Speed Handling of Fragile Objects Using Pneumatic Grippers. IEEE Trans. Autom. Sci. Eng. 2017, 15, 1600–1608. [Google Scholar] [CrossRef]
- Blanes, C.; Mellado, M.; Beltran, P. Novel Additive Manufacturing Pneumatic Actuators and Mechanisms for Food Handling Grippers. Actuators 2014, 3, 205–225. [Google Scholar] [CrossRef]
- Jagtap, S.; Bhatt, C.; Thik, J.; Rahimifard, S. Monitoring Potato Waste in Food Manufacturing Using Image Processing and Internet of Things Approach. Sustainability 2019, 11, 3173. [Google Scholar] [CrossRef]
- Joshua, S.R.; Shin, S.; Lee, J.H.; Kim, S.K. Health to Eat: A Smart Plate With Food Recognition, Classification, and Weight Measurement for Type-2 Diabetic Mellitus Patients, Nutrition Control. Sensors 2023, 23, 1656. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cuboid | Heart | Sphere | Circle | Ellipse | Triangle | Long | Thicker | Cylinder | Flat Square | |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | - | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 3 |
| 2 | 1 | 1 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 3 |
| 3 | 1 | 1 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 3 |
| 4 | 1 | 1 | 1 | 1 | 2 | 1 | 2 | 2 | 2 | 3 |
| 5 | 1 | 1 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 3 |
| 6 | 1 | 1 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 3 |
| 7 | 1 | - | 1 | 1 | 2 | 1 | 2 | 2 | 2 | 3 |
| 8 | 1 | 1 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 3 |
| 9 | 1 | 1 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 3 |
| 10 | 1 | 1 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 3 |
| [%] | 100 | 80 | 100 | 100 | 80 | 100 | 100 | 100 | 100 | 100 |
| Cuboid | Heart | Sphere | Circle | Ellipse | Triangle | Long | Thicker | Cylinder | Flat Square | |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | O | O | O | O | O | O | X | X | O | O |
| O | O | O | O | O | O | X | X | O | O | |
| 2 | O | O | O | O | O | O | △ | O | X | O |
| O | O | O | O | O | O | O | O | X | O | |
| 3 | O | O | O | O | O | O | X | O | O | O |
| O | O | O | O | O | O | X | O | O | O | |
| 4 | O | O | O | O | X | O | O | O | X | O |
| O | O | O | O | X | O | O | O | X | O | |
| 5 | O | O | O | O | O | O | O | O | O | O |
| O | O | O | O | O | O | X | O | X | O | |
| 6 | O | O | O | O | O | O | X | O | X | O |
| O | O | O | O | O | O | X | O | X | O | |
| 7 | O | O | O | O | O(2) | O | X | X | O | O |
| O | O | O | O | O(2) | O | O | X | O | O | |
| 8 | O | O | O | O | O | O | X | O | O | O |
| O | O | O | O | O | O | X | O | O | O | |
| 9 | O | O | O | O | O | O | O | O | O | O |
| O | O | O | O | O | O | X | O | O | O | |
| 10 | O | O | O | O | X | O | O | O | X | O |
| O | O | O | O | X | O | O | O | X | O | |
| [%] | 100 | 100 | 100 | 100 | 80 | 100 | 45 | 80 | 60 | 100 |
| 100 | 100 | 100 | 100 | 80 | 100 | 40 | 80 | 50 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Baek, J.; Jeong, M.; Suh, J.; Lee, J. Development of Fishcake Gripping and Classification Automation Process Based on Suction Shape Transformation Gripper. Inventions 2024, 9, 17. https://doi.org/10.3390/inventions9010017
Kim S, Baek J, Jeong M, Suh J, Lee J. Development of Fishcake Gripping and Classification Automation Process Based on Suction Shape Transformation Gripper. Inventions. 2024; 9(1):17. https://doi.org/10.3390/inventions9010017
Chicago/Turabian StyleKim, Seolha, Jonghwan Baek, Myeongsu Jeong, Jinho Suh, and Jaeyoul Lee. 2024. "Development of Fishcake Gripping and Classification Automation Process Based on Suction Shape Transformation Gripper" Inventions 9, no. 1: 17. https://doi.org/10.3390/inventions9010017