

Large-Scale BESS for Damping Frequency Oscillations of Power Systems with High Wind Power Penetration


Abstract
:1. Introduction
2. Materials and Methods
2.1. Grid Frequency Response Characteristics
2.2. ESS Sizing for IR and PFR
2.2.1. Sizing ESS for IR
2.2.2. Sizing ESS for PFR
2.2.3. ESS Modelling for IR and PFR Controls
- Inertia Response Control (IR)
- 2.
- Primary Frequency Control (PFR)
2.3. Prony Method
2.4. Proposed Strategy for BESS
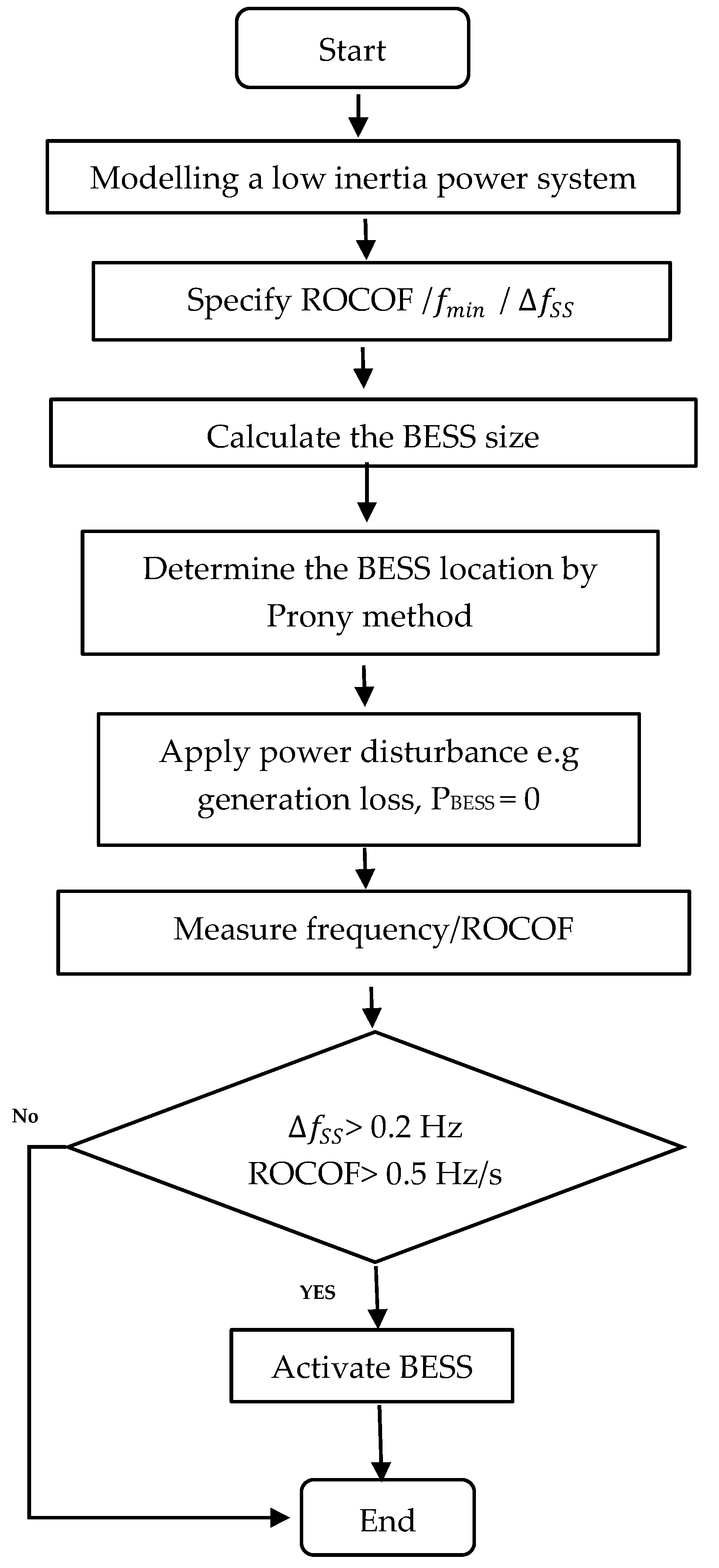
- Step 1:
- Model a low-inertia power system with a significant renewable penetration level.
- Step 2:
- Specify the ROCOF, FSS, and minimum frequency of the system.
- Step 3:
- Calculate the required size of the BESS using (6) and (8). The required size depends on the contingency type; in this study, 350 MVA loss of generation power was considered.
- Step 4:
- Determine the best location of the BESS by using the Prony method and damping ratio analysis, which is detailed in Section 3.3.
- Step 5:
- Apply a considerably large contingency, e.g., loss of a power generator unit, considering BEES size = 0 MW.
- Step 6:
- By measuring the ROCOF and system frequency, determine if ROCOF > 0.5 Hz and/or frequency deviation > 0.2 Hz. If yes, activate the BESS. Otherwise, end the process.
3. Results
3.1. System Overview
3.2. Simulation and Analysis
3.2.1. Case 1: 25% Wind Penetration
3.2.2. Case 2: 35% Wind Penetration
3.2.3. Case 3: 50% Wind Penetration
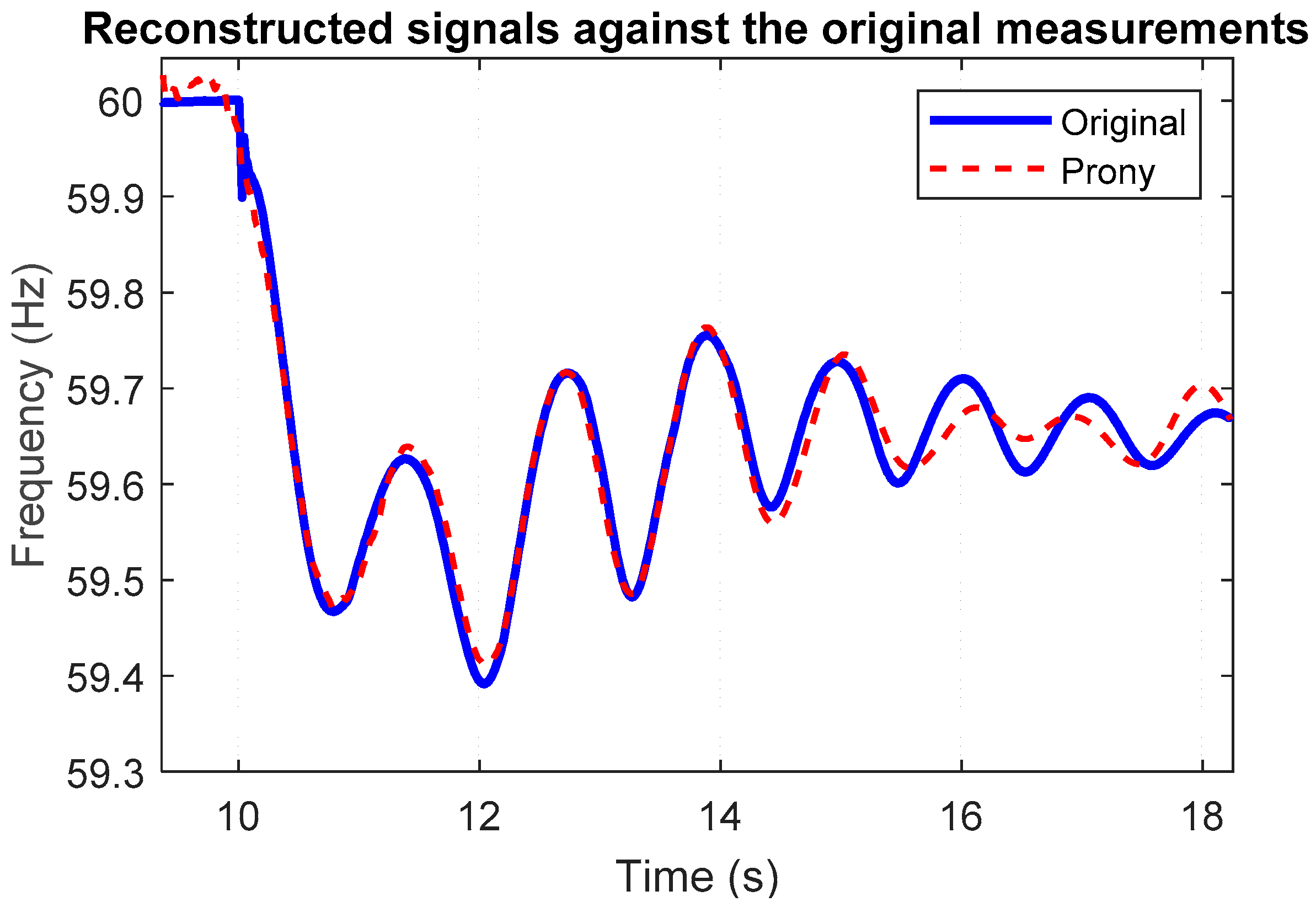
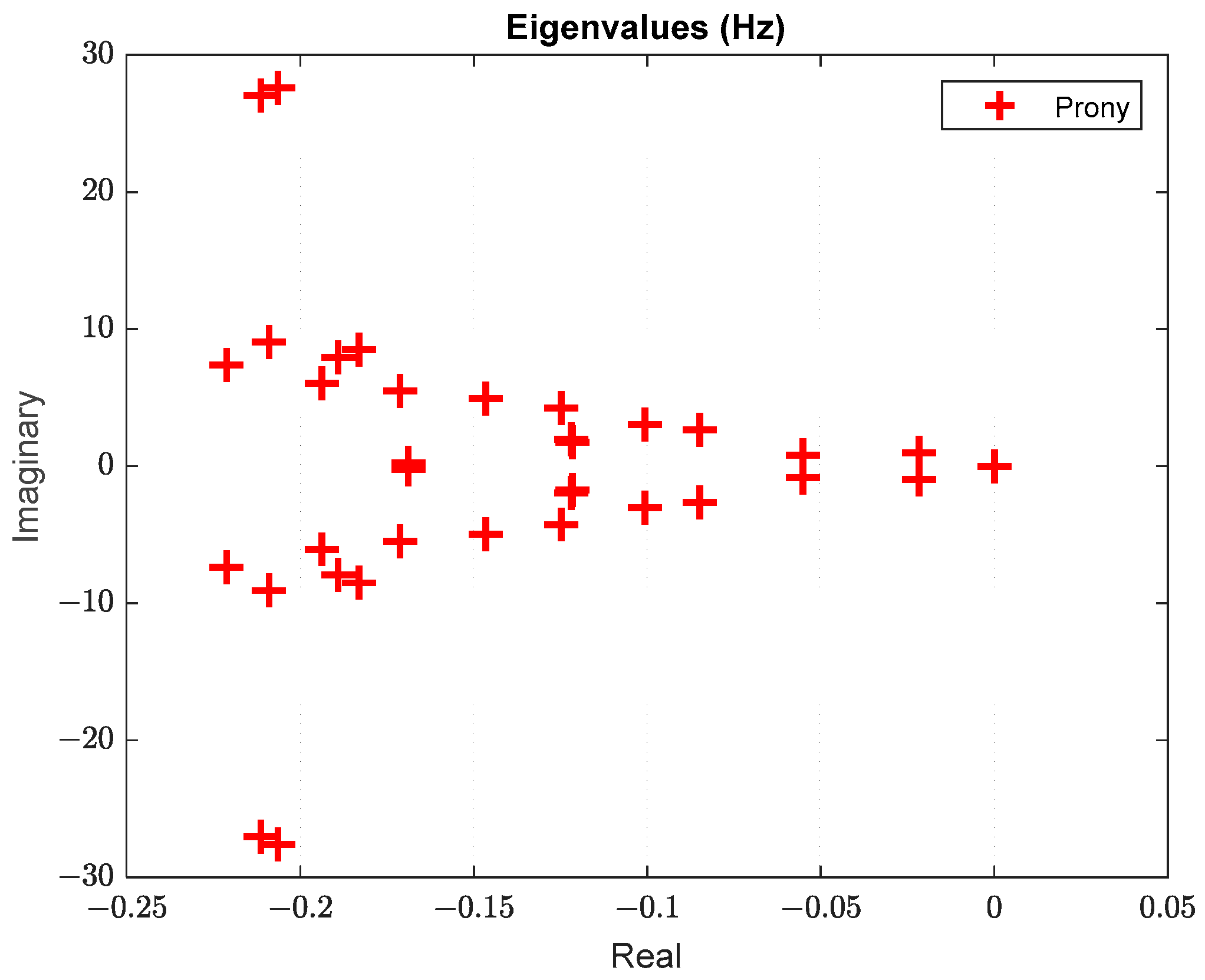
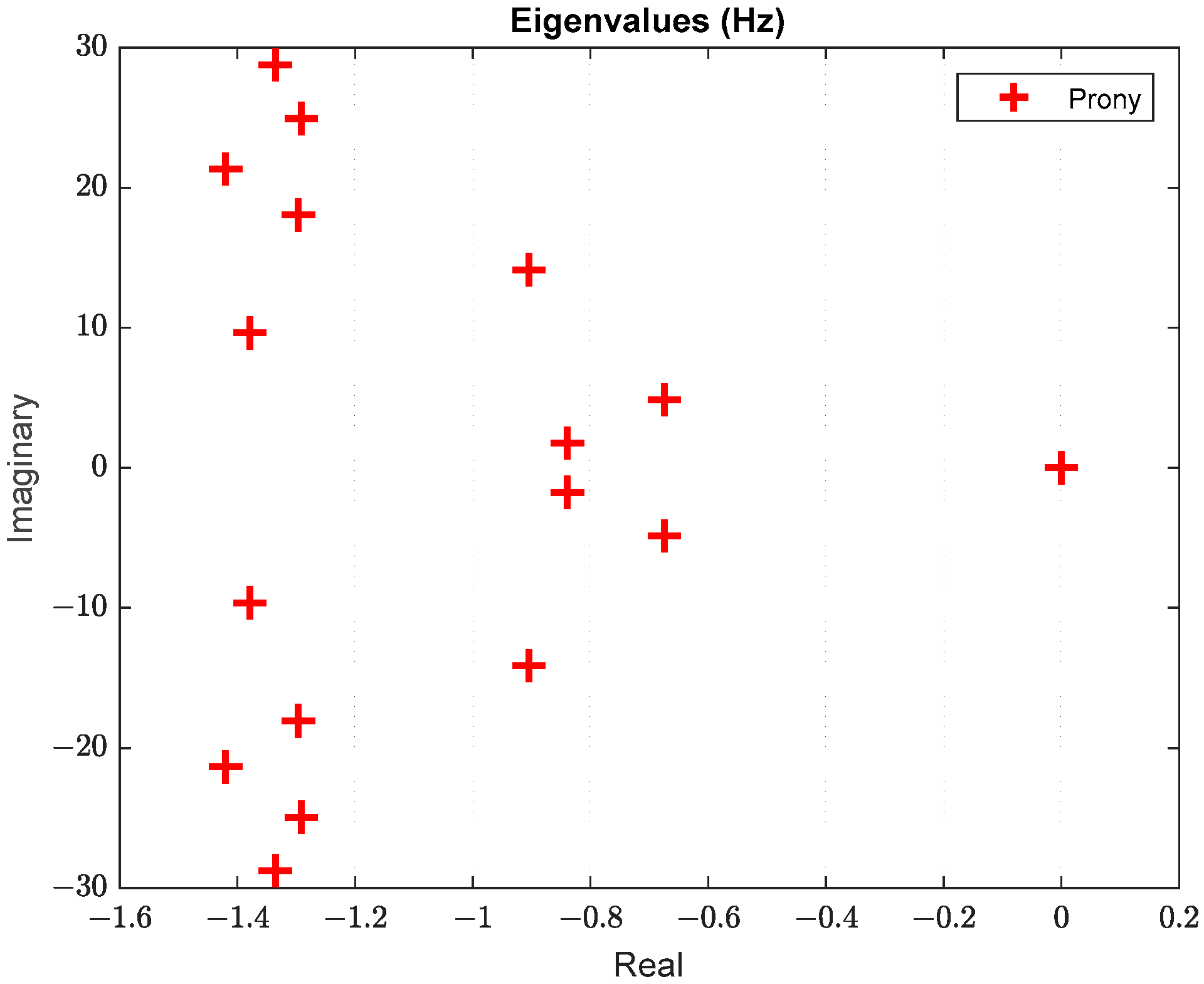
3.3. Prony Analysis
4. Discussions
5. Conclusions
- (a)
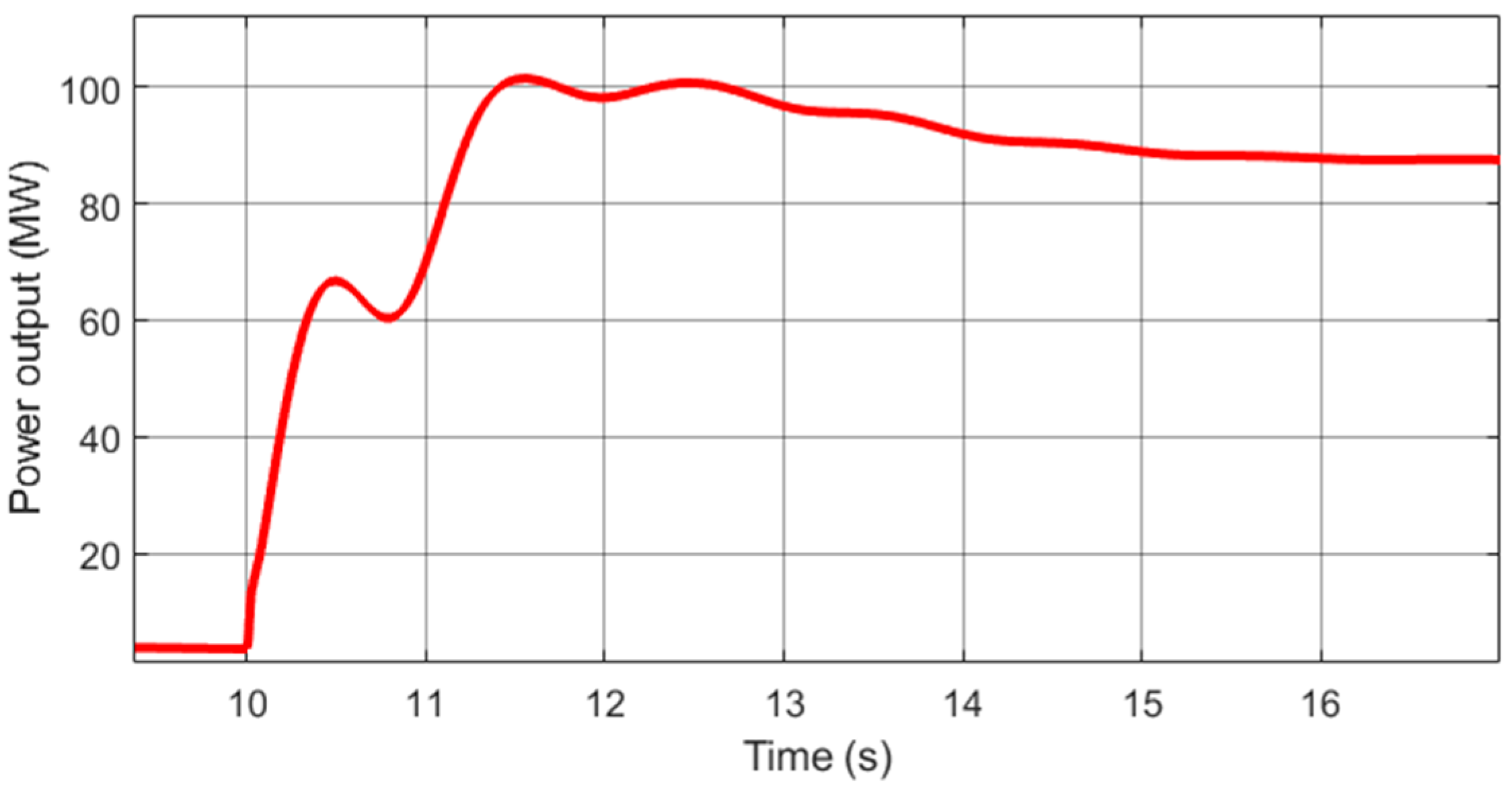
- A system design strategy for power system frequency control by using BESS, including sizing ESS for IR and PFR, and therefore investigating how sizing capacity is related to renewable energy penetration levels. It has been shown that the sizing capacity of BESS is very close to that of the actual dynamic response capacity of BESS. Based on case studies, it has been found that at a penetration level of 25%, the sizing capacity for BESS is set to 102 MW; at a penetration level of 35%, the sizing capacity for BESS is set to 136 MW; and at a penetration level of 50%, the sizing capacity for BESS is set to 188 MW. In other words, with the increase in renewable energy, the capacity of BESS for frequency control needs to be increased.
- (b)
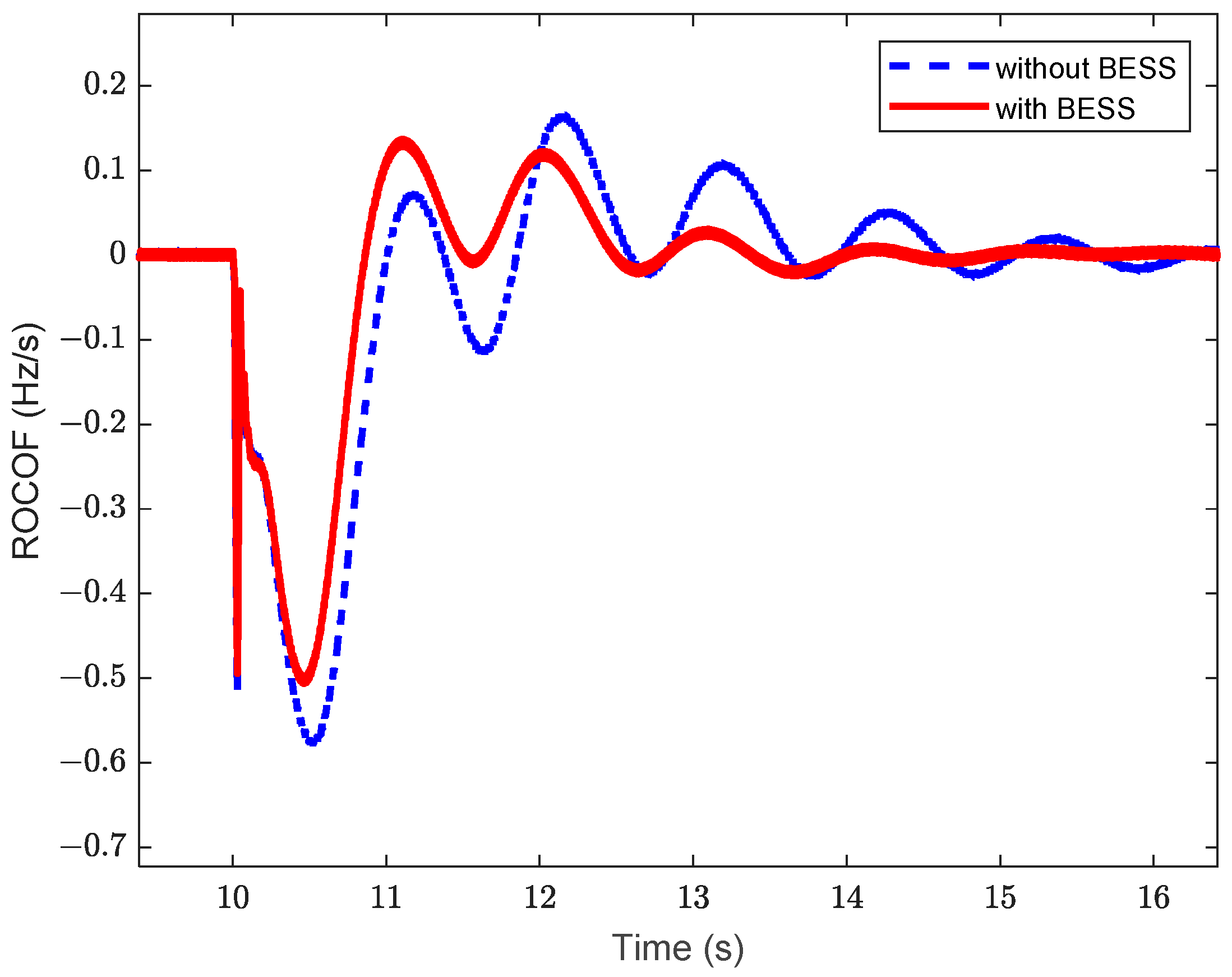
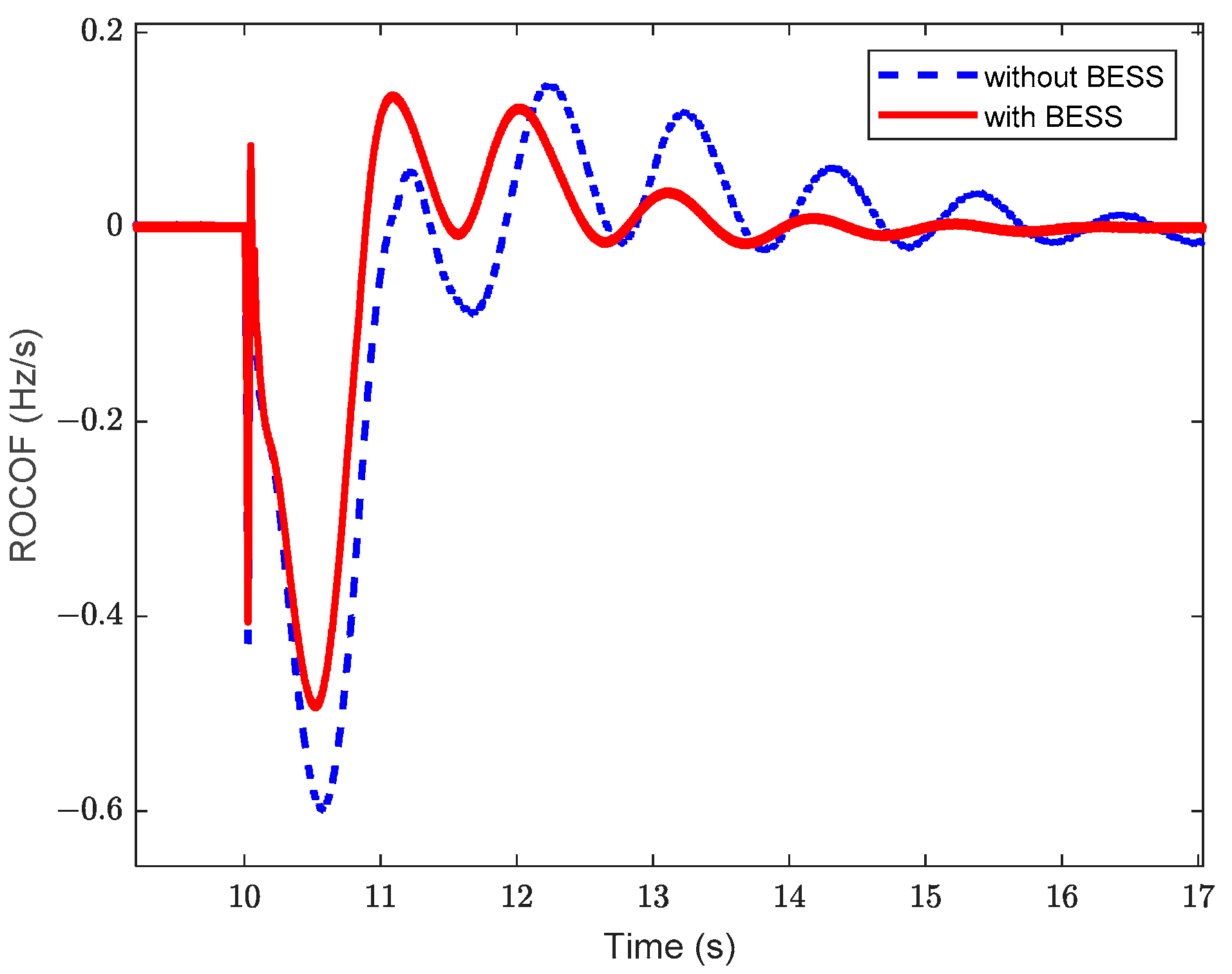
- A BESS locating approach to determine the best location of the BESS by analysing system oscillation using the Prony method, which is easy to implement based on measurements while actual physical system models are not required. This will make the Prony method suitable for large-scale real power grid analysis based on measurements. The proposed Prony method for system stability and oscillation analysis has been demonstrated on the Kundur 4-machine, 11-bus test system. In particular, it has been shown that with BESS, system damping can be improved in comparison to that without BESS. The case studies demonstrated a significant enhancement in steady-state frequency deviation, frequency nadir, and ROCOF after the implementation of BESS at the chosen bus. Integrating BESS into the power grid can effectively prevent UFLS by choosing the appropriate size, placement, and operation strategy for the BESS.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

| Power Plant | Power Rating (MVA) | Active Power (MW) | Droop (R) | Inertia Constant (s) |
|---|---|---|---|---|
| G1 | 900 | 700 | 4.7% | 6.5 |
| G2 | 900 | 700 | 4% | 6.5 |
| G3 | 900 | 719 | 4.7% | 6.175 |
| G4 | 900 | 700 | 4% | 6.175 |
References
- Tielens, P.; Van Hertem, D. The relevance of inertia in power systems. Renew. Sustain. Energy Rev. 2016, 55, 999–1009. [Google Scholar] [CrossRef]
- Poolla, B.K.; Bolognani, S.; Dorfler, F. Optimal Placement of Virtual Inertia in Power Grids. IEEE Trans. Autom. Control 2017, 62, 6209–6220. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Yang, G.; Nielsen, A.H.; Jensen, P.H. Combination of Synchronous Condenser and Synthetic Inertia for Frequency Stability Enhancement in Low-Inertia Systems. IEEE Trans. Sustain. Energy 2019, 10, 997–1005. [Google Scholar] [CrossRef]
- Brogan, P.V.; Best, R.J.; Morrow, D.J.; McKinley, K.; Kubik, M.L. Effect of BESS Response on Frequency and RoCoF during Underfrequency Transients. IEEE Trans. Power Syst. 2019, 34, 575–583. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, T.; Gooi, H.B.; Masiello, R.D.; Katzenstein, W. Penetration Rate and Effectiveness Studies of Aggregated BESS for Frequency Regulation. IEEE Trans. Smart Grid 2016, 7, 167–177. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, C.; Wang, B.; Sun, K. Damping control for a target oscillation mode using battery energy storage. J. Mod. Power Syst. Clean Energy 2018, 6, 833–845. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, C.; Sun, K.; Shi, D.; Wang, Z. Optimization of Battery Energy Storage to Improve Power System Oscillation Damping. IEEE Trans. Sustain. Energy 2019, 10, 1015–1024. [Google Scholar] [CrossRef]
- Cai, Z.; Bussar, C.; Stöcker, P.; Moraes, L.; Magnor, D.; Leuthold, M.; Sauer, D.U. Application of Battery Storage for Compensation of Forecast Errors of Wind Power Generation in 2050. Energy Procedia 2015, 73, 208–217. [Google Scholar] [CrossRef]
- Knap, V.; Chaudhary, S.K.; Stroe, D.-I.; Swierczynski, M.; Craciun, B.-I.; Teodorescu, R. Sizing of an Energy Storage System for Grid Inertial Response and Primary Frequency Reserve. IEEE Trans. Power Syst. 2016, 31, 3447–3456. [Google Scholar] [CrossRef]
- Datta, U.; Kalam, A.; Shi, J. The relevance of large-scale battery energy storage (BES) application in providing primary frequency control with increased wind energy penetration. J. Energy Storage 2019, 23, 9–18. [Google Scholar] [CrossRef]
- Salman, U.T.; Al-Ismail, F.S.; Khalid, M. Optimal Sizing of Battery Energy Storage for Grid-Connected and Isolated Wind-Penetrated Microgrid. IEEE Access 2020, 8, 91129–91138. [Google Scholar] [CrossRef]
- Xie, H.; Teng, X.; Xu, Y.; Wang, Y. Optimal Energy Storage Sizing for Networked Microgrids Considering Reliability and Resilience. IEEE Access 2019, 7, 86336–86348. [Google Scholar] [CrossRef]
- Alsharif, H.; Jalili, M.; Hasan, K.N. Power system frequency stability using optimal sizing and placement of Battery Energy Storage System under uncertainty. J. Energy Storage 2022, 50, 104610. [Google Scholar] [CrossRef]
- Metwaly, M.K.; Teh, J. Probabilistic Peak Demand Matching by Battery Energy Storage Alongside Dynamic Thermal Ratings and Demand Response for Enhanced Network Reliability. IEEE Access 2020, 8, 181547–181559. [Google Scholar] [CrossRef]
- Oudalov, A.; Chartouni, D.; Ohler, C. Optimizing a Battery Energy Storage System for Primary Frequency Control. IEEE Trans. Power Syst. 2007, 22, 1259–1266. [Google Scholar] [CrossRef]
- Ngamroo, I. An optimization technique of robust load frequency stabilizer for superconducting magnetic energy storage. Energy Convers. Manag. 2005, 46, 3060–3090. [Google Scholar] [CrossRef]
- Moon, H.-J.; Yun, A.-Y.; Kim, E.-S.; Moon, S.-I. An Analysis of Energy Storage Systems for Primary Frequency Control of Power Systems in South Korea. Energy Procedia 2017, 107, 116–121. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, C.; Dai, R.; Liu, G.; Xu, Y. Optimal Battery Energy Storage Placement for Transient Voltage Stability Enhancement. In Proceedings of the 2019 IEEE Power & Energy Society General Meeting (PESGM), Atlanta, GA, USA, 4–8 August 2019; pp. 1–5. [Google Scholar]
- Ramos, A.F.; Ahmad, I.; Habibi, D.; Mahmoud, T.S. Placement and sizing of utility-size battery energy storage systems to improve the stability of weak grids. Int. J. Electr. Power Energy Syst. 2023, 144, 108427. [Google Scholar] [CrossRef]
- Abdel-Mawgoud, H.; Kamel, S.; Khasanov, M.; Khurshaid, T. A strategy for PV and BESS allocation considering uncertainty based on a modified Henry gas solubility optimizer. Electr. Power Syst. Res. 2021, 191, 106886. [Google Scholar] [CrossRef]
- Padhee, M.; Pal, A.; Mishra, C.; Vance, K.A. A Fixed-Flexible BESS Allocation Scheme for Transmission Networks Considering Uncertainties. IEEE Trans. Sustain. Energy 2020, 11, 1883–1897. [Google Scholar] [CrossRef]
- Das, C.K.; Mahmoud, T.S.; Bass, O.; Muyeen, S.M.; Kothapalli, G.; Baniasadi, A.; Mousavi, N. Optimal sizing of a utility-scale energy storage system in transmission networks to improve frequency response. J. Energy Storage 2020, 29, 101315. [Google Scholar] [CrossRef]
- Golpira, H.; Atarodi, A.; Amini, S.; Messina, A.R.; Francois, B.; Bevrani, H. Optimal Energy Storage System-Based Virtual Inertia Placement: A Frequency Stability Point of View. IEEE Trans. Power Syst. 2020, 35, 4824–4835. [Google Scholar] [CrossRef]
- Akram, U.; Mithulananthan, N.; Shah, R.; Pourmousavi, S.A. Sizing HESS as inertial and primary frequency reserve in low inertia power system. IET Renew. Power Gener. 2021, 15, 99–113. [Google Scholar] [CrossRef]
- Akram, U.; Nadarajah, M.; Shah, R.; Milano, F. A review on rapid responsive energy storage technologies for frequency regulation in modern power systems. Renew. Sustain. Energy Rev. 2020, 120, 109626. [Google Scholar] [CrossRef]
- El-Bidairi, K.S.; Nguyen, H.D.; Mahmoud, T.S.; Jayasinghe, S.D.G.; Guerrero, J.M. Optimal sizing of Battery Energy Storage Systems for dynamic frequency control in an islanded microgrid: A case study of Flinders Island, Australia. Energy 2020, 195, 117059. [Google Scholar] [CrossRef]
- Yoo, Y.; Jung, S.; Jang, G. Dynamic Inertia Response Support by Energy Storage System with Renewable Energy Integration Substation. J. Mod. Power Syst. Clean Energy 2020, 8, 260–266. [Google Scholar] [CrossRef]
- Silva Jr, S.S.; Assis, T.M.L. Adaptive underfrequency load shedding in systems with renewable energy sources and storage capability. Electr. Power Syst. Res. 2020, 189, 106747. [Google Scholar] [CrossRef]
- Zhao, M.; Yin, H.; Xue, Y.; Zhang, X.-P.; Lan, Y. Coordinated Damping Control Design for Power System with Multiple Virtual Synchronous Generators Based on Prony Method. IEEE Open Access J. Power Energy 2021, 8, 316–328. [Google Scholar] [CrossRef]
- Thi Nguyen, H.; Yang, G.; Hejde Nielsen, A.; Højgaard Jensen, P.; Pal, B. Applying Synchronous Condenser for Damping Provision in Converter-dominated Power System. J. Mod. Power Syst. Clean Energy 2021, 9, 639–647. [Google Scholar] [CrossRef]
- Trudnowski, D.J.; Smith, J.R.; Short, T.A.; Pierre, D.A. An application of Prony methods in PSS design for multimachine systems. IEEE Trans. Power Syst. 1991, 6, 118–126. [Google Scholar] [CrossRef]
- Kundur, P. Power Systems Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- NERC. Reliability Guideline Recommended Approaches for UFLS Program Design with Increasing Penetrations of DERs; NERC: Atlanta, GA, USA, 2021. [Google Scholar]
- Kanchanaharuthai, A.; Chankong, V.; Loparo, K.A. Transient Stability and Voltage Regulation in Multimachine Power Systems Vis-à-Vis STATCOM and Battery Energy Storage. IEEE Trans. Power Syst. 2015, 30, 2404–2416. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















| Scenario | Calculation Results of BESS Size (MW) | Simulation Results of BESS Size (MW) | |Error| |
|---|---|---|---|
| Case 1 | 99 | 102 | 2.2% |
| Case 2 | 143 | 136 | 4.9% |
| Case 3 | 193.5 | 188 | 2.8% |
| Scenario | ROCOF (Hz/s) | (Hz) | Frequency Nadir (Hz) | |||
|---|---|---|---|---|---|---|
| Without BESS | With BESS | Without BESS | With BESS | Without BESS | With BESS | |
| Case 1 | 0.58 | 0.50 | 0.24 | 0.18 | 59.62 | 59.71 |
| Case 2 | 0.60 | 0.48 | 0.25 | 0.17 | 59.58 | 59.68 |
| Case 3 | 0.69 | 0.49 | 0.35 | 0.17 | 59.38 | 59.65 |
| System | Eigenvalue | |
|---|---|---|
| Without BESS | 0 ± j0 | 0.00748 |
| −0.0217 ± j0.9858, −0.0551 ± j0.8163, | ||
| −0.0849 ± j2.6332, −0.1006 ± j 3.0462, | ||
| −0.1216 ± j1.746, −0.1218 ± j1.9425, | ||
| −0.1248 ± j4.2571, −0.1465 ± j4.9476, | ||
| −0.1688 ± j0.2237, −0.1713 ± j5.4736, | ||
| −0.183 ± j8.5048, −0.189 ± j0.1937, | ||
| −0.2064 ± j27.587, −0.209 ± j9.062, | ||
| −0.2114 ± j27.0249, −0.2212 ± j7.3659 | ||
| With BESS located at Bus 2 | 0 ± j0 | 0.0464 |
| −0.6743 ± j4.8589, −0.8391 ± j1.7627, | ||
| −0.9046 ± j14.1408, −1.2914 ± j24.9384 | ||
| −1.2965 ± j18.0661, −1.3356 ± j28.7655 | ||
| −1.3789 ± j9.6421, −1.4198 ± j21.3423 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Assery, S.A.; Zhang, X.-P.; Chen, N. Large-Scale BESS for Damping Frequency Oscillations of Power Systems with High Wind Power Penetration. Inventions 2024, 9, 3. https://doi.org/10.3390/inventions9010003
Assery SA, Zhang X-P, Chen N. Large-Scale BESS for Damping Frequency Oscillations of Power Systems with High Wind Power Penetration. Inventions. 2024; 9(1):3. https://doi.org/10.3390/inventions9010003
Chicago/Turabian StyleAssery, Shami Ahmad, Xiao-Ping Zhang, and Nan Chen. 2024. "Large-Scale BESS for Damping Frequency Oscillations of Power Systems with High Wind Power Penetration" Inventions 9, no. 1: 3. https://doi.org/10.3390/inventions9010003
APA StyleAssery, S. A., Zhang, X.-P., & Chen, N. (2024). Large-Scale BESS for Damping Frequency Oscillations of Power Systems with High Wind Power Penetration. Inventions, 9(1), 3. https://doi.org/10.3390/inventions9010003