Abstract
Passing sight distance (PSD) is a vital design element that directly imposes economic, as well as safety and operational, considerations. The provision of PSD is highly prioritized, at least for rural road sections without additional passing lanes. The paper investigates areas with PSD inadequacy on rural roads with crest vertical curves. The research is based on the German rural roads design guidelines, where PSD is currently dependent on the homogeneousness of the proposed road design classes and no longer on speed. Therefore, the required PSD for all the examined design classes was set to 600 m. The interaction between the road surface and the line of sight between the passing and the opposing vehicles was assessed through six different cases, while every case was associated with the resulting formulas. The analysis revealed that, excluding one situation for the EKL4 design class, the boundaries of PSD inadequacy were concentrated in advance and inside the vertical curve, and do not depend on the grade difference of the vertical curve but only on the crest vertical curvature rate value. The paper delivers a ready-to-use tool for engineers to identify areas with inadequate PSD in the early stages of the design process and avoid implementing costly additional passing lanes.
1. Introduction
Sight distance is the length of roadway ahead that is visible to the driver [1]. Passing sight distance (PSD) is a critical sight distance parameter that directly imposes economic, as well as safety and operational, considerations. PSD is the distance that drivers must be able to see along the road ahead to safely and efficiently initiate and complete passing maneuvers of slower vehicles on two-lane rural roads using the lane normally reserved for opposing traffic [2].
Unfortunately, vehicle collisions associated with failure during the passing process generally result in high-severity accidents, such as head-on collisions or collisions between the passing and the passed vehicle driving in the same direction [3,4]. As a result, overtaking ranks among the most dangerous driving maneuvers in terms of crash severity [5,6].
Aiming to quantify the impact of overtaking maneuvers on road safety, a recent study on Italian two-lane highways reported that approximately 38% of all crashes are attributed to such maneuvers, underscoring their significant contribution to overall accident rates [7,8]. Due to the complexity of overtaking maneuvers, the reported percentage encompasses a broad range of related factors, not limited solely to PSD but also including factors such as driving behavior errors, adverse roadway geometry, speeding, etc.
Road sections with limited passing opportunities (passing zones), besides limiting safety, also impose operational degradation. Such cases might motivate certain drivers to make risky passing attempts either late in a passing zone or on a portion of the road not intended for passing and therefore seem mostly critical [9].
The most effective means to eliminate such accidents is to provide additional passing lanes, or at least protected passing zones through the provision of a continuous 3-lane cross-section (2 + 1 roads). However, such arrangements are not always possible on 2-lane road sections due to economic, topographical, or environmental protection constraints [10].
The provision of PSD is highly prioritized, at least for rural road sections without additional passing lanes. As stated in current design practice (e.g., RAL [11], OMOE-X [12]), the minimum requirement for PSD sufficiency on 2-lane rural roads is around 20–25% of their total length.
Many research studies have explored the concept of Passing Sight Distance (PSD) in the literature. In some of them, analytical models are proposed. For example, in [13] and [14], the term “critical position” is introduced, where the completion or abortion of the passing process is assessed. More recent are probabilistic models that associate PSD with levels of safety [15,16]. Other studies on PSD have utilized field data collection [5,17,18,19], with some incorporating advanced technologies such as Geographic Information System (GIS)-based viewshed analysis [20] and Light Detection and Ranging (LiDAR) [21], which were further employed to validate or compare with corresponding analytical PSD models.
According to the recent German rural road design guidelines [11], PSD is currently dependent on the homogeneousness of the proposed road design classes and no longer on speed, where, as a result, the required PSD is set to 600 m.
This value of 600 m has evolved from the PSD requirement of a passenger car (vehicle 1) at 100 km/h attempting to perform a passing maneuver to a truck (vehicle 3) driven at 70 km/h, while at the same time, at the opposing traffic stream, another passenger car (vehicle 2) is running at 100 km/h. The required PSD is the sum of the distances covered by vehicle 1 and vehicle 2 plus a safety margin distance of 100 m (Figure 1).
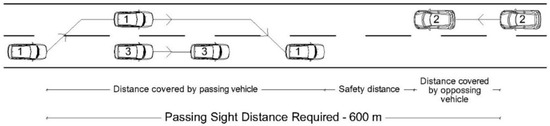
Figure 1.
Required passing sight distance [11].
In road design, the requirement that typically governs the definition of crest vertical curves is the critical case of stopping sight distance provision. Ensuring PSD along crest vertical curves is not a mandatory criterion.
However, in various design guidelines [1,12,22], PSD is provided along crest vertical curves, where significantly larger curvature rates are required due to the longer distances involved. This often introduces substantial geometric, land-use, and economic constraints, which limit the practical implementation of such designs in many roadway projects. Since the control crest vertical curvature rates needed to satisfy PSD requirements are at least twice as large—depending on design speed—compared to those required for Stopping Sight Distance (SSD) [1,12,22], these cost-intensive solutions are typically avoided. As a result, despite their benefits, they often lead to very limited passing opportunities in practice.
The paper investigates areas with PSD adequacy for 2-lane rural road segments where crest vertical curvature rates are selected according to the existing road design approach of SSD provision.
Such an assessment, although critical for identifying areas with inadequate PSDs in road projects, even during initial design stages, has not been analyzed adequately in terms of thoroughly understanding the interaction of the involved geometric parameters. Moreover, through this research, the authors intend to quantify PSD availability and deliver a ready-to-use tool for practitioners.
2. Methodology
In order to utilize a uniform approach, in terms of PSD requirements, the investigation was performed in line with the design classes of the German rural road design guidelines RAL 2012 [11]. It is evident that PSD sufficiency is granted when the line of sight between the passing and the opposing vehicle, set to 600 m, is not obstructed by the road surface.
In RAL 2012 guidelines, four design classes are introduced, namely, EKL1, EKL2, EKL3, and EKL4, with varying design speeds and control design elements (Table 1). However, the EKL1 design class, with design speed V = 110 km/h, was excluded from the present analysis, since the passing process is performed only through additional passing lanes.

Table 1.
Control values for German RAL 2012 design guidelines [11].
The objective of the assessment was to determine the parameters that impact the driver’s sightline from vehicle 1 to vehicle 2. It is obvious that, besides the relative position of the involved vehicles, the arrangement of the crest vertical curve is also critical.
Therefore, the areas with inadequate PSDs (<600 m) were assessed as a function of crest vertical curvature rates and the algebraic differences between the entrance and exit grades, s1 and s2, respectively, with regard to the control design parameters of Table 1 per design class.
Throughout the analysis, the height of the driver’s sightline height (hA) was set to 1.00 m [11]. The object height specifically refers to the height of the opposing vehicle. A recent study [8] highlighted that since the average vehicle height is approximately 1.50 m, there is a need to reconsider the conventional opposing vehicle height values of 1.00 m to 1.10 m, which are commonly used. However, according to the RAL 2012 design guidelines, although the typical vehicle height is 1.50 m, a safety margin of 0.50 m is recommended in crest curve areas to ensure the vehicle remains identifiable at the stopping sight distance. Consequently, the object height is standardized at hz = 1.00 m for design purposes.
The authors of a previous study [23] identified six different cases for addressing an unobstructed driver’s sightline. More specifically, every case defined the boundaries in advance and beyond a single crest vertical curve where the elevation at any point along the above-mentioned line of sight, between the passing and the opposing vehicle, was found to be below the road surface. These boundaries of insufficient PSDs were drawn as a function of the position of the passing vehicle (vehicle 1). For every case, certain equations were derived that deliver the height difference between the elevation (hxline) of every point along the line of sight (line of 600 m from vehicle 1 to vehicle 2) and the respective projected elevation (hx) on the road surface.
A brief outlook of the examined cases, as well as the derived equations, is provided in the following sub-sections.
2.1. Case 1
Both vehicle 1 and vehicle 2 are positioned in advance of the crest vertical curve (Figure 2).
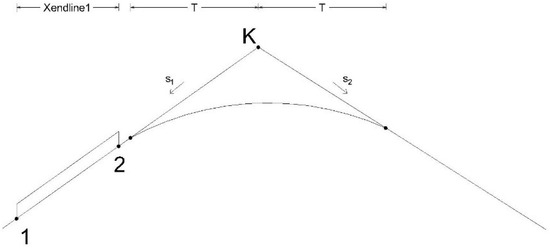
Figure 2.
Overview of Case 1.
The requested height difference for this case is given by Equation (1).
where
- x: distance from vehicle 1 along the line of sight (m);
- hxline: elevation of line of sight at a random position x (m);
- hx: projected road elevation of hxline (m);
- hA: driver’s sightline height (1.00 m);
- hZ: opposing vehicle–object height (1.00 m);
- xendline1: distance between vehicle 1 and vehicle 2 (600 m).
2.2. Case 2
Vehicle 1 is positioned in advance of the crest vertical curve, and vehicle 2 is inside the curve (Figure 3). The following subcases apply:
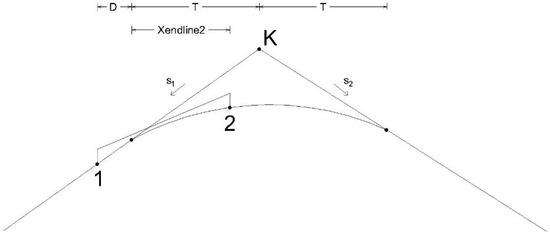
Figure 3.
Overview of Case 2.
2.2.1. Subcase 2A
The present subcase refers to the area between vehicle 1 and the beginning of the vertical curve.
The requested height difference for this case is given by Equation (2) as follows:
where
- xendline2: distance between the beginning of the crest vertical curve and vehicle 2 (m);
- HK: radius of crest vertical curve (m);
- D: distance between vehicle 1 and the beginning of the curve (m);
- x: distance from vehicle 1 along the line of sight (m).
2.2.2. Subcase 2B
Subcase 2B refers to the area between the beginning of the vertical curve and vehicle 2.
The requested height difference for this case is shown through Equation (3).
where
- x: distance from the beginning of the vertical curve (m).
2.3. Case 3
In Case 3, vehicle 1 and vehicle 2 are positioned in advance and beyond the crest vertical curve, respectively (Figure 4). The following subcases apply:
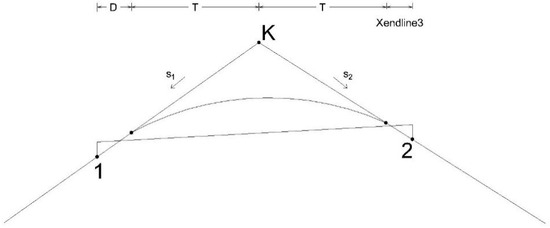
Figure 4.
Overview of Case 3.
2.3.1. Subcase 3A
Subcase 3A refers to the area between vehicle 1 and the beginning of the vertical curve.
The requested height difference for this case is given by Equation (4).
where
- x: distance from vehicle 1 (m);
- xendline3: distance between the end of the vertical curve and vehicle 2 (m);
- T: tangent length of crest vertical curve (m).
2.3.2. Subcase 3B
The above subcase refers to the area inside the vertical curve.
The requested height difference for this case is given by Equation (5).
where
- x: distance from the beginning of the curve (m);
- D: distance between vehicle 1 and the beginning of the curve (m).
2.3.3. Subcase 3C
Subcase 3C refers to the area between the end of the vertical curve and vehicle 2.
The requested height difference for this case is given by Equation (6).
where
- x: distance from the end of the curve (m).
2.4. Case 4
In Case 4, both vehicle 1 and vehicle 2 are positioned inside the crest vertical curve (Figure 5). The requested height difference for this case is given by Equation (7).
where
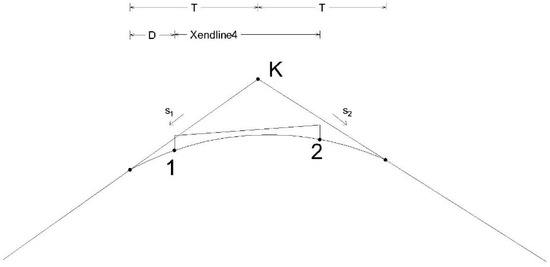
Figure 5.
Overview of Case 4.
- x: distance from point 1 (m);
- xendline4: distance between vehicle 1 and vehicle 2 (600 m);
- D: distance between vehicle 1 and the beginning of the curve (m).
2.5. Case 5
Vehicle 1 is positioned inside the crest vertical curve, and vehicle 2 is beyond the curve (Figure 6).
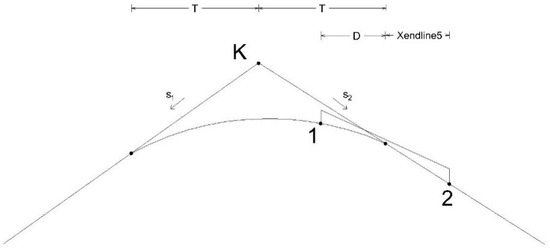
Figure 6.
Overview of Case 5.
The following subcases apply:
2.5.1. Subcase 5A
Subcase 5A refers to the area between vehicle 1 and the end of the vertical curve.
The requested height difference for this case is given by Equation (8).
where
- x: distance from vehicle 1 (m);
- xendline5: distance between the end of the curve and vehicle 2 (m);
- D: distance between vehicle 1 and the end of the curve (m).
2.5.2. Subcase 5B
Subcase 5B refers to the area between the end of the vertical curve and vehicle 2.
The requested height difference for this case is given by Equation (9).
where
- x: distance from end of vertical curve (m).
2.6. Case 6
Both vehicle 1 and vehicle 2 are positioned beyond the crest vertical curve (Figure 7).
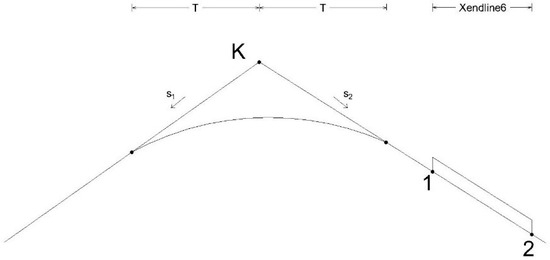
Figure 7.
Overview of Case 6.
The requested height difference for this case is given by Equation (10).
where
- x: distance from vehicle 1 (m);
- xendline6: distance between vehicle 1 and vehicle 2 (600 m).
2.7. Superelevation Impact Investigation
In order to investigate more realistic conditions, the roadway’s cross-slope impact in terms of potential sight obstruction was further assessed, assuming a crown superelevation configuration.
More specifically, vehicle 1 and vehicle 2 were positioned in the opposing traffic lanes in order of the respective line of sight to form the hypotenuse of triangle 123 (Figure 8).
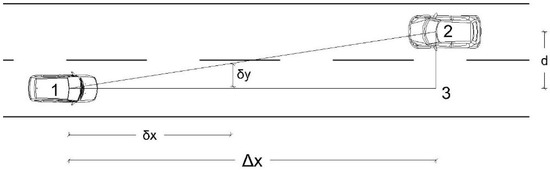
Figure 8.
Cross-slope impact investigation on the line of sight between vehicle 1 and vehicle 2.
As expected, the roadway’s cross-slope delivers more conservative results. The requested height difference between hxline along the line of sight (vehicle 1 to vehicle 2) and the respective projected elevation hx on the road surface was performed based on the applied cross-section per assessed design class. The lateral distance d between vehicle 1 and vehicle 2 [line (2–3) in Figure 8] was assumed to be formed by the midpoint of each traffic lane, and depends on the utilized cross-section type per design class (Table 1). However, for design class EKL4, although passing is generally undesirable, this additional assessment was not performed since the vehicles were assumed to travel along the centerline of the 6 m carriageway.
The derived equations are as follows:
where
- hxline12: elevation of line of sight at a random position along line (12) (m);
- hx12: projected road elevation of hxline12 (m);
- hx: road axis elevation at distance δx from vehicle 1 (m);
- e: roadway’s cross-slope (2.50%);
- d: lateral distance between vehicle 1 and vehicle 2 (4.00 m EKL2, 3.50 m EKL3);
- δx: random longitudinal distance from vehicle 1 (m);
- δy: random lateral distance from vehicle 1, δy = d δx/Δx (m);
- Δx: longitudinal distance of required PSD from point 1 (vehicle 1) to point 3 (600 m).
The above equations were used for every case in addition to the ones described in the previous sections, although their overall contribution is the extension of areas with insufficient PSD by only a few meters (below 2.5 m).
Considering that overtaking is already prohibited on sharp curves where superelevation rates reach up to 7.0%, the influence of superelevation on PSD should instead be examined on wider curves with gentler superelevation rates, which are typically below 5%. For such cases, the analysis showed that PSD is only marginally affected—by approximately 6 to 9 m—indicating a negligible impact on overall safety.
3. Workflow Description
Using the above-described equations, areas of inadequate PSD (PSD < 600 m) were identified based on the German rural road design guidelines (7).
The workflow of the overall algorithm, developed through VBA in MS Excel, is as follows:
- Initially, the PSD adequacy breakpoint (600 m in the present analysis), the design class of the roadway, the crest vertical curvature rate (HK), and the beginning (s1) and ending (s2) grade values are entered, which are not necessarily symmetrical.
- For a distance of at least 600 m in advance of the starting point of the vertical curve, vehicle 1 is positioned, where 600 m after vehicle 1, vehicle 2 is positioned as well (line of sight).
- A calculation step is defined (1 m in the present analysis) for which the difference hxline − hx is calculated along the line of sight.
- For hxline − hx > 0 → PSD >600 m, where for hxline − hx < 0 → PSD <600 m.
- For cases where PSD <600 m, the position of vehicle 1 is recorded.
- Vehicle 1 and vehicle 2 are shifted ahead according to the calculation step, and once again, hxline − hx is calculated along the line of sight through an iteration practice.
- The process terminates when vehicle 1 reaches beyond the ending point of the crest vertical curve (Case 6).
For every set of parameters input, the algorithm delivers the area with inadequate PSD between 2 distinct points, point A and point B, respectively (Figure 9). In other words, point A and point B represent the boundaries of insufficient PSD for vehicle 1 (passing vehicle).
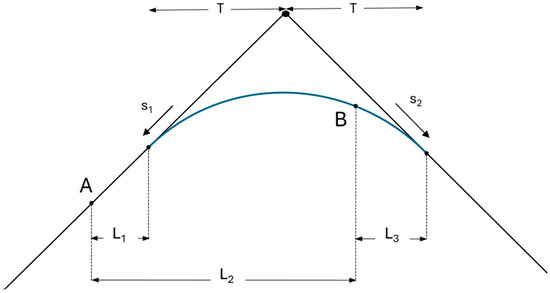
Figure 9.
Representation of PSD inadequacy in accordance with L1, L2, and L3. A, B: Boundaries of insufficient PSD for vehicle 1 (passing vehicle), s1: Beginning grade value of vertical curve (%), s2: Ending grade value of vertical curve (%), L1: Distance of point A from the beginning of the curve, L2: Area with PSD inadequacy (distance between A and B), L3: Distance of point B from the end of the curve.
Moreover, for almost all the examined cases (excluding one referenced next), the area of inadequate PSD initiated and ended in advance and inside the vertical curve, respectively, where three different lengths were identified (Figure 9):
- L1, distance of point A from the beginning of the curve;
- L2, area with PSD inadequacy (distance between A and B);
- L3, distance of point B from the end of the curve.
A more comprehensive representation of the passing process is also shown in Figure 10. The solid box indicates the length of the utilized crest vertical curvature rate in advance and beyond the vertical vertex. Both traffic directions with inadequate PSD are shown as columns per direction of travel (the right column indicates the right traffic lane) and in accordance with the distances L1 and L3.
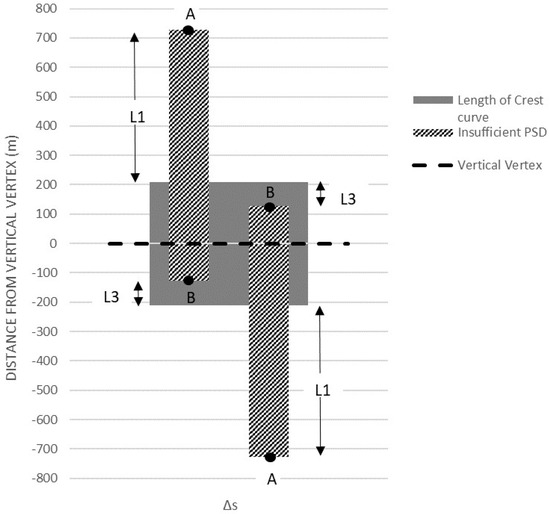
Figure 10.
Representation of PSD inadequacy for both traffic directions.
A general remark for all the examined cases is that only Case 3 (where vehicle 1 and vehicle 2 are positioned in advance and beyond the crest vertical curve, respectively) is grade dependent. More specifically, Equations (4)–(6), besides the crest vertical curvature rate (HK), include the tangent length of the crest vertical curve (T) as well, the value of which depends on the grade difference Ds between the beginning (s1) and ending (s2) grade values (Ds = s2 − s1).
The investigation revealed that in all the examined points along the line of sight between vehicle 1 and vehicle 2, only in one situation (EKL4, Ds = 2.00%), Case 3 delivered PSD adequacy. This means that for the exception where EKL4 is combined with Ds = 2.00%, besides point A, point B was also found to be positioned in advance of the crest vertical curve.
4. Results
For every examined design class, the critical lengths L1 and L2, which are essential in order to define the boundaries with PSD inadequacy, were calculated as a function of the (absolute) grade difference Ds between the beginning (s1) and ending (s2) grade values (Ds = s2 − s1) and curvature rate (HK) of the crest vertical curve.
In Figure 11, a double graph is illustrated, which provides a ready-to-use tool for practitioners. This graph can be implemented as follows.
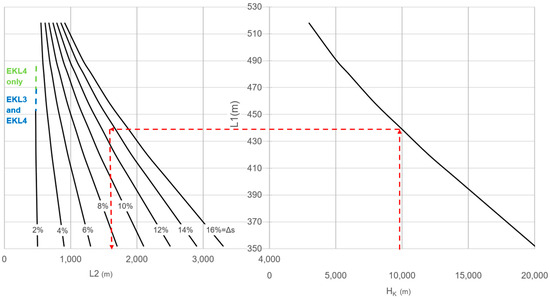
Figure 11.
Arrangements and values of crest vertical curvature rates for PSD adequacy. Red dotted line is an example for determining L1 and L2 values, assuming Δs = 14%.
By selecting a desired crest curvature rate at the right side of the graph and following the dashed red line, the length L1 is defined. Then, depending on the selected Ds value, the length L2 is determined. For example, for HK = 10,000 m, L1 is determined as 439 m, and assuming Ds = 14%, L2 is calculated to 1677 m.
Figure 11 illustrates the outputs of the present research regarding acceptable values of crest vertical curvature rates (HK) and grade differences (Ds) for all three design classes (EKL2, EKL3, and EKL4) [11]. It is evident that one should select the above entrance parameters in accordance with the control values shown in Table 1. For example, during a PSD assessment for a road segment classified as EKL3, acceptable entrance parameters are HK ≥ 6000 and Ds ≤ 13.0%.
In the left section of Figure 11, excluding the line referring to Ds = 2%, with respect to the above paragraph, all the other Ds values can be utilized per design class. In the case of Ds = 2%, the line splits into three parts, since the selected HK parameter should also confirm the control tangent length T of Table 1. Therefore, by selecting Ds = 2%, the control crest curvature rates for EKL2, EKL3, and EKL4 design classes are HK = 8500 m, HK = 7000 m, and HK = 5500 m, respectively.
The most interesting finding was the fact that, per design class, for the same crest vertical curvature rate, the boundaries with insufficient PSD for the passing vehicle, formed between point A and point B in Figure 9; Figure 10, were found to have the same relative distances from the starting and ending point of the vertical curve, L1 and L3, respectively. This is because, as already mentioned, only for Case 3, PSD inadequacy is grade dependent, where Case 3 applies only for EKL4 combined with Ds = 2%.
The above outputs in terms of quantifying more accurately the values L1 and L2 for arrangements of HK and Ds are shown in Table 2.
Table 2.
Values of L2 as a function of L1, HK, and Ds.
5. Discussion
The stated methodology can be implemented for any road design guideline by introducing the required PSD and the respective control values (driver’s eye height, object height, control crest vertical curvature rates, and grade values), which in general depend on the examined roadway’s design speed.
In addition to geometric considerations, it is essential to link traffic volumes to the provision of Passing Sight Distance (PSD). Even a preliminary analysis of typical traffic conditions—such as the frequency of passing maneuvers during peak and off-peak hours—can provide valuable insights into whether the available PSD is functionally adequate. Roads with low traffic volumes may not necessitate continuous passing opportunities, whereas on higher-volume rural highways, limited PSD can contribute to driver frustration and risky overtaking behavior. Therefore, integrating traffic flow characteristics into PSD assessment helps align geometric design with real-world driving behavior and enhances the safety and efficiency of two-lane highways.
To further establish the practical applicability of the proposed methodology for determining PSD on crest vertical curves, a comparative analysis with real-world road segments is essential. This can be achieved by selecting representative road sections with known geometric characteristics and documented visibility challenges. By applying the methodology to these segments, the calculated PSD values can be directly compared with observed passing opportunities, driver behavior patterns, and recorded safety data such as crash rates related to overtaking maneuvers. Additionally, field measurements of actual sight distances and driver perception–reaction times can be used to validate the assumptions embedded in the model. Such comparisons will help identify potential discrepancies between theoretical predictions and real-world conditions, allowing for calibration and refinement of the methodology.
6. Conclusions
The paper quantifies areas with PSD adequacy on road segments where crest vertical curvature rates are based on the existing and most common road design approach of SSD provision. More specifically, through the examined cases, the authors analyze the impact of the involved geometric parameters.
The current analysis, aiming to utilize a uniform approach for PSD, was performed in line with the design classes of German [11] rural road design guidelines [11], where PSD is currently dependent on the homogeneousness of the proposed road design classes and no longer on speed, and as a result, the required PSD is set to 600 m.
The assessment was performed for the control values of three design classes, namely, EKL2, EKL3, and EKL4, with speed values of 100 km/h, 90 km/h, and 70 km/h, respectively. The EKL1 design class (V = 110 km/h) was excluded from the present analysis, since the passing process is performed only through additional passing lanes.
Aiming to define the boundaries in advance and beyond the crest vertical curve, where the elevation at any point along the line of sight between the passing and the opposing vehicle is below the road surface, six different cases were investigated. In order to assess realistic conditions, the roadway’s cross-slope impact in terms of potential sight obstruction was also included in the analysis.
The analysis revealed that, excluding one situation for EKL4 design class, the boundaries of PSD inadequacy were concentrated in advance and inside the vertical curve, and do not depend on the grade difference Ds of the vertical curve but only on the crest vertical curvature rate value.
The paper delivered a ready-to-use tool for engineers to identify areas with inadequate PSD in the early stages of the design process and avoid implementing costly additional passing lanes.
However, further analysis is required in order to cover curvature rates and vertical curves more comfortably and assess the impact of combined horizontal and vertical alignment.
Moreover, future research is also necessary to link the passing process more closely to the traffic volumes in order to understand the breakpoint for introducing additional passing lanes further.
Author Contributions
Conceptualization, S.M., V.M., K.M. and A.K.; methodology, S.M., V.M., K.M. and A.K.; validation, S.M., V.M., K.M. and A.K.; formal analysis, S.M., V.M., K.M. and A.K.; investigation, S.M., V.M., K.M. and A.K.; data curation, S.M., V.M., K.M. and A.K.; writing—original draft preparation, S.M., V.M., K.M. and A.K.; writing—review and editing, S.M., V.M., K.M. and A.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- American Association of State Highway and Transportation Officials (AASHTO). A Policy on Geometric Design of Highways and Streets, 5th ed.; American Association of State Highway and Transportation Officials (AASHTO): Washington, DC, USA, 2018. [Google Scholar]
- Transportation Research Board (TRB). Passing Sight Distance Criteria, National Cooperative Highway Research Program (NCHRP); NCHRP Report 605; Transportation Research Board (TRB): Washington, DC, USA, 2008. [Google Scholar]
- Richter, T.; Ruhl, S. Untersuchung von Maßnahmen zur Prävention von Überholunfällen auf Einbahnigen Landstraßen, [Examination of Measures to Prevent Passing-Related Accidents on Two Lane Highways] Gesamtverband der Deutschen Versicherer, Forschungsbericht, No.24 [German Insurance Association, German Insurance Accident Research]; Unfallforschung der Versicherer, GDV: Berlin, Germany, 2014. [Google Scholar]
- Clarke, D.D.; Ward, P.J.; Jones, J. Overtaking Road-Accidents: Differences in Maneuver as a Function of Driver Age. Accid. Anal. Prev. 1998, 30, 455–467. [Google Scholar] [CrossRef] [PubMed]
- Llorca, C.; Moreno, A.T.; Garcia, A. Modelling Vehicles Acceleration During Overtaking Manoeuvres. IET Intell. Transp. Syst. 2016, 10, 206–215. [Google Scholar] [CrossRef]
- Ivan, J.N.; Wang, C.; Bernardo, N.R. Explaining Two-Lane Highway Crash Rates Using Land Use and Hourly Exposure. Accid. Anal. Prev. 2000, 32, 787–795. [Google Scholar] [CrossRef] [PubMed]
- Italian National Institute of Statistics. Road Accidents in Italy (Years 2000–2006). Available online: www.istat.it (accessed on 1 June 2020).
- Guerrieri, M. Two-Lane Highways Crest Curve Design. The Case Study of Italian Guidelines. Appl. Sci. 2020, 10, 8182. [Google Scholar] [CrossRef]
- Belz, N. Using Field and Simulation Data to Assess Passing Zone Behavior on Rural Two Lane Highways. In Proceedings of the 98thAnnual Meeting of the Transportation Research Board, Washington, DC, USA, 13–17 January 2019. [Google Scholar]
- Vetters, A.; Jaehrig, T. Verification of the Existing Model for Passing Sight Distance on Single Two-Lane Rural Carriageways. In Proceedings of the 6th IEEE International Conference on Cognitive Infocommunications, Győr, Hungary, 19–21 October 2015. [Google Scholar]
- German Road and Transportation Research Association. Geometric Design Standards. In Guidelines for the Design of Rural Roads; RAL: Cologne, Germany, 2012. [Google Scholar]
- Ministry of Environment, Regional Planning and Public Works. Guidelines for the Design of Road Projects (OMOE-X); Alignment, Part 3; Ministry of Environment, Regional Planning and Public Works: Athens, Greece, 2001. [Google Scholar]
- Glennon, J. New and Improved Model of Passing Sight Distance. Transp. Res. Rec. 1988, 1195, 132–137. [Google Scholar]
- Hassan, Y.; Easa, S.M.; El Halim, A. Passing Sight Distance on Two-Lane Highways: Review and Revision. Transp. Res. Part A Policy Pr. 1996, 30, 453–467. [Google Scholar] [CrossRef]
- El Khoury, J.; Hobeika, A. New Approach for Estimating the Passing Sight Distance Requirements. Transportation Research Board. In Proceedings of the 85th Annual Meeting, Washington, DC, USA, 22–26 January 2006. [Google Scholar]
- El-Bassiouni, S.; Sayed, T. Design Requirements for Passing Sight Distance: A Risk-based Approach. Transportation Research Board. In Proceedings of the 89th Annual Meeting, Washington, DC, USA, 10–14 January 2010. [Google Scholar]
- Polus, A.; Livneh, M.; Frischer, B. Evaluation of The Passing Process on Two-Lane Rural Highways. Transp. Res. Rec. 2000, 1701, 53–60. [Google Scholar] [CrossRef]
- Harwood, D.W.; Gilmore, D.; Richard, K.; Dunn, J.; Sun, C. Passing Sight Distance Criteria; NCHRP Report 605; Transportation Research Board: Washington, DC, USA, 2008. [Google Scholar]
- Llorca, C.; García, G. Evaluation of Passing Process on Two-Lane Rural Highways in Spain with New Methodology Based on Video Data. Transp. Res. Rec. 2011, 2262, 42–51. [Google Scholar] [CrossRef]
- Abdulhafedh, A. A Novel GIS Approach for Locating No-Passing Zones and Assessing Passing Sight Distance on Two-Lane, Two-Way Highways: A Case Study of MO Route 5 in the State of Missouri, USA. Open Access Libr. J. 2023, 10, 1–15. [Google Scholar] [CrossRef]
- Agina, S.; Shalkamy, A.; Gouda, M.; El-Basyouny, K. Automated Assessment of Passing Sight Distance on Rural Highways using Mobile LiDAR Data. Transp. Res. Board 2021, 2675, 676–688. [Google Scholar] [CrossRef]
- Ministero delle Infrastrutture e dei Trasporti. Norme Funzionali e Geometriche per la Costruzione Delle Strade; n. 6792; Ministero delle Infrastrutture e dei Trasporti: Rome, Italy, 2001.
- Markos, K.; Mavromatis, S. Investigation of Passing Sight Distance Sufficiency on Rural Roads with Crest Vertical Curves. Adv. Transp. Stud. Int. J. 2019, 49, 117–128. [Google Scholar]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).