Abstract
In this work, an adaptive dynamic surface control law for a type of strict-feedback fractional-order nonlinear system is proposed. The considered system contained input quantization and unknown external disturbances. The virtual control law is presented by utilizing a dynamic surface control approach at each step, where the nonlinear compensating term with the estimation of unknown bounded parameters is introduced to overcome the influence of unknown external disturbances and surface errors. Meanwhile, the adaptive laws of relevant parameters are also designed. In addition, an improved fractional-order nonlinear filter is developed to deal with the explosion of complexity raised by the recursive process. In the last step, an adaptive dynamic surface control law is proposed to ensure the convergence of tracking error, in which the Nussbaum gain function is applied to solve the problem of the unknown control gain generated by input quantization. Then, the fractional Lyapunov stability theory is applied to verify the stability of the proposed control law. Finally, simulation examples are given to illustrate the effectiveness of the proposed control law.
1. Introduction
In the past several decades, fractional calculus has received tremendous attention because many complex physical phenomena can be characterized by fractional-order systems [1,2,3,4,5]. Many distinguished results related to stability analysis and control schemes have been reported [6,7,8,9]. In addition, many fractional-order control approaches, such as fractional-order terminal sliding mode control [10], fractional-order prescribed performance control [11], fractional-order fuzzy control [12,13], fractional-order neural network control [14], fractional-order neuro-fuzzy control [15], have been designed and applied through the combination of fractional-order operators and classical control methods. However, it should be emphasized that, in many cases, the control methods of integer-order systems cannot be directly extended to fractional-order systems. Therefore, the control of fractional-order systems is still a problem with both great potential and challenges, which inspires this work.
It is widely known that, as an efficient control tool, backstepping control establishes a system framework for the control design of nonlinear systems. In this method, the studied system is decomposed into several subsystems, and a virtual control law is designed for each step until the actual control law is obtained, which greatly reduces the design of the control law. To date, various results have been presented for integer-order systems with backstepping control [16,17,18,19]. Unfortunately, for the noninteger-order systems with backstepping control, only a few research efforts have been made. For example, in [20], an adaptive neural network backstepping control scheme was proposed for fractional-order nonlinear systems with actuator faults, in which the neural network was introduced into the recursive design to approximate the unknown nonlinear dynamics. In [21], the authors addressed an adaptive backstepping hybrid fuzzy sliding mode control method and solved the finite-time tracking control problem of a type of uncertain fractional-order nonlinear system. In [22], an adaptive backstepping control scheme was developed for a type of fractional-order nonlinear system, in which the external disturbance and uncertain parameters were considered, and an auxiliary function was designed to replace the discontinuous function (such as the sign function) to obtain a smooth control input. It should be pointed out that there is an obvious problem with the results mentioned above, that is, the complexity explosion problem caused by repeated differentiation in the recursive design of backstepping controls. How to avoid this issue to achieve the stability of backstepping for fractional-order systems is a hot topic, which is another inspiration of this work.
For one thing, to overcome the explosion of complexity in recursive design, some researchers have applied the dynamic surface control approach, or the command filtered control technique, to simplify the design process [23,24,25,26]. Based on the application of first-order or second-order filters, the repeated differentiation in recursive design is skillfully avoided. Up to now, many excellent results have been produced in the control of fractional-order systems. In [27,28], a control law for uncertain fractional-order nonlinear systems was designed by applying the backstepping dynamic control technique, where the unknown external disturbance and the approximation error were compensated using a designed auxiliary function. In [29], a compound learning adaptive dynamic surface control method was proposed for fractional-order nonlinear systems, which guarantees that the tracking error can converge. In [30,31], the neural network command filtering control of fractional-order systems with actuator faults was addressed, in which the control problems of finite-time control and synchronization control were solved using the proposed control schemes. As far as we know, the adaptive dynamic surface control of fractional-order nonlinear systems has not been fully developed in the existing literarure, especially in the case of the strict-feedback form.
In addition, the performance of a system may degrade due to external factors (for example, input saturation, external disturbances and limited bandwidth) or even as a result of damage to the stability of the system. Therefore, it is worth devoting attention to the design of a suitable controller to reduce the effects of external factors in the system. Considering the existence of input saturation, external disturbance and input quantization, some related results, such as the barrier function-based adaptive sliding mode control law, the observer-based control law and the command filter-based adaptive fixed-time control law, have been obtained by studying integer-order systems and fractional-order systems [32,33,34,35]. However, these external factors may also lead to an unknown control direction of the system. To solve the control problem of unknown control direction, some researchers introduced the Nussbaum control technique [36,37]. For fractional-order nonlinear systems, the problem of unknown control direction is a topic worthy of attention, but there are few research results in this area.
Motivated by the above discussion, this work addresses the control problem of adaptive dynamic surface control for strict-feedback fractional-order nonlinear systems with input quantization and unknown external disturbances. The main contributions can be summarized as follows:
(i) An adaptive dynamic surface control law was developed for the strict-feedback fractional-order nonlinear systems with input quantization and external disturbances. Different from [12,15,22], the unknown parameters, unknown external disturbances and unknown control direction were considered simultaneously, and an improved fractional-order nonlinear filter with an adaptive law was introduced to solve the explosion of complexity problem created by repeatedly differentiating the virtual control law.
(ii) To overcome the influence of unknown external disturbances and surface errors, nonlinear auxiliary functions with the estimation of unknown bounded parameters were introduced into the design of virtual control laws and the final actual control law. This differed from the results of [38,39].
(iii) To solve the problem of the unknown control gain raised by input quantization, the Nussbaum gain function technique was considered in the design of the actual control law. Compared with references [34,35], the final control law design in this paper was simplified.
The rest of this paper is organized as follows: Preliminaries and the problem formulation are provided in Section 2. In Section 3, the design of the adaptive dynamic surface control law is shown in detail, and then the stability analysis is outlined. The simulation environment and methods are given in Section 4 to illustrate the effectiveness of the proposed control law, and the results and discussion are presented in Section 5. Finally, some brief conclusions to this paper are given in Section 6.
2. Preliminaries and Problem Formulation
2.1. Preliminaries
First, some basic definitions and lemmas of fractional calculus are provided.
Definition 1 [27].
Assuming that is a continuously differentiable function, its Caputo fractional-order derivative with order is defined as
whereandstands for the Caputo fractional-order differential operator with order, and. Here,stands for the gamma function and satisfies.
Definition 2 [7].
The two-parameter Mittag-Leffler function is described as
whereare constants andis a complex number. Specifically, we have.
Taking the Laplace transform of (2) yields
For the two-parameter Mittag-Leffler function, the following two lemmas hold.
Lemma 1 [7].
For any integer , there exist real numbers and , and an arbitrary real number, , such that
where and , and the symbol represents the argument of a complex number.
Lemma 2 [7].
For , if there exist real numbers and , then we have
where is constant, and .
Lemma 3 [10].
Let be an equilibrium point of the fractional-order system , where . Assume that there exist class functions , and and a continuous Lyapunov functionV (x(t),t), such that the following inequalities
and
hold; then, the origin of the system is asymptotically stable.
Next, a definition and some useful lemmas for control law design are given.
Definition 3[36].
A function is called a Nussbaum gain function if it satisfies the following properties:
Lemma 4 [30].
Let and ,be smooth functions defined on with for , and let ,be unknown time-varying parameters that have the same sign and satisfy with . If the following inequality holds:
then , and will be bounded on for , where and are constants. As , the boundedness of is held.
Lemma 5 [12].
Letbe a smooth function; then, for all , the following inequality holds:
Lemma 6 (Young’s Inequality) [40].
For , the following inequality holds:
where ,,and.
Lemma 7 [41].
For any and , the following inequality holds:
2.2. Problem Description
The subsequent discussion is based on the following type of strict-feedback fractional-order nonlinear systems:
where , , and are the state vector, input and output of this system, respectively; is the quantized input signal of a hysteretic quantizer; and , are unknown constant parameters and known smooth functions, respectively; and , represents the unknown but bounded external disturbances.
With reference to [42,43], the quantized input can be described as the following form:
where , , and with parameters and ; and is considered to be the quantization density. Moreover, can be decomposed into the following form:
where and .
The control objective of this paper was to propose an adaptive control law for the strict-feedback fractional-order nonlinear systems with quantized input and external disturbances, combining the dynamic surface control method and Nussbaum gain function technique such that the output could follow the desired signal and ensure the boundedness of all signals in the given strict-feedback fractional-order nonlinear systems.
Assumption 1 [15,27,36].
There exists an unknown positive constant , such that for all , .
Assumption 2 [12,27,30].
The given desired signal and its fractional-order derivatives and are smooth, available and bounded.
3. Adaptive Dynamic Surface Control Law Design and Stability Analysis
3.1. Adaptive Dynamic Surface Control Law Design
In this subsection, an adaptive dynamic surface control law is presented to deal with the stabilization problem of the strict-feedback fractional-order nonlinear system (13), and a stability analysis is provided as well.
For the control law design, we define the coordinate transformation as
where ; is the surface error; is the filtered output, which is yielded through a fractional-order filter on the virtual control law ; and represents the output error of the fractional-order filter.
In this paper, the fractional-order filter design was inspired by the work of [43]. Let the virtual control law , i = 1, ⋯, n − 1 pass through the following fractional-order filter with a time constant to yield the filtered output , that is
where i = 1, ⋯, n − 1 and is the estimation of , which will be defined later.
Step 1 (). In view of (13) and (16), the -order derivative of is obtained as
The design of the following Lyapunov function candidate is
where and are design parameters, , and and are the estimations of and , respectively.
Along with (18) and Lemma 5, the -order derivative of is given as
The design of the virtual control law is
where is a design parameter and represents a positive uniform continuous and bounded function.
With reference to [28], there exist constants and , such that
Let pass through the fractional-order filter (17) to obtain the filtered output , then one has
Substituting (21) into (20), we obtain
where is considered using Lemma 7.
The adaptive laws and are
Substituting (25) and (26) into (24), we have
Step (). From (16), the -order derivative of is as follows:
The design of the following Lyapunov function candidate is
where and are design parameters, , and and are the estimations of and , respectively.
Similar to Step 1, and along with (28), the -order derivative of is
The design of the virtual control law is
where is a design parameter and represents the estimation of , which will be defined later.
Letting pass through the fractional-order filter (17) to obtain the filtered output , one has
The adaptive laws and are
In addition, using Lemma 7, we have
Substituting (31)–(35) into (30), the following can be obtained:
Step (). This is the last step, in which the actual control law will be developed using the dynamic surface control technique and Nussbaum gain function technique. Invoking (14)–(16), the -order derivative of is
The design of the following Lyapunov function candidate is
where and are design parameters, , and and are the estimations of and , respectively.
Taking the -order derivative of along with (37) yields
where and is the introduced adjustment coefficient, which is used to adjust the control law.
Remark 1.
As, the explicit value of is not easy to obtain. Therefore, the Nussbaum gain function technique is introduced to deal with the unknown control gain and design the control law.
Let pass through the fractional-order filter (17) to obtain the filtered output , then one has
where represents the estimation of , which will be defined later.
The design of the actual control law is
where is a given Nussbaum gain function, and and adaptive law are given, respectively, as
where is a design parameter.
The adaptive laws and are
Using Lemma 7, one has
Substituting (40)–(46) into (39), we obtain
Remark 2.
The nonlinear termsandin the virtual control law and actual control law are used to compensate for the bound of external disturbances, and the unknown bounded function, where the introduction of the adjusting functionis used to overcome a possible chattering problem in the virtual control laws and the actual control law. According to [28],can be considered an exponential function, for example,(and are positive constants), which satisfies and .
Remark 3.
The nonlinear function,with an adaptive law foris designed in each fractional-order nonlinear filter and is used to compensate for the effect caused by surface error. Furthermore, the nonlinear function is introduced into the fractional-order nonlinear filter, which can also avoid the complexity explosion problem caused by repeatedly differentiating the virtual control law.
3.2. Stability Analysis
Based on the above analysis, the main results of this work can be summarized as follows.
Theorem 1.
Consider the strict-feedback fractional-order nonlinear systems (13) with input quantization and external disturbances. Under Assumptions 1 and 2, the virtual control laws are constructed as in (21) and (31); the adaptive laws are considered as in (25), (26), (33), (34), (44) and (45); and the actual control law is designed as in (41) with (42) and (43). Then, the following results are obtained: (i) the boundedness of all signals of the strict-feedback fractional-order systems (13) are obtained and (ii) the tracking error can converge to an arbitrary small neighborhood of the origin.
Proof.
From (16) and (17), the -order derivative of is
where Hi(·) is a continuous function with variables e1, ⋯, ei+1, z1, ⋯, zi, , , , , , , and .
The following Lyapunov function candidate is constructed:
where λi > 0 and are design parameters, and and are estimations of .
In addition, considering Assumption 2, there exists a compact set
where is a known constant.
Furthermore, we define the following compact set as
where represents any constant.
Noting (50) and (51), it can be found that the set is also a compact set, and that and are bounded functions. Therefore, there exist positive constants , , such that on , since the determined values of are not easy to obtain, which are estimated by .
The -order derivative of is
Substituting (27), (36), (47) and (48) into (52), we have
Using Lemma 7, the following can be obtained
Then, one has
The adaptive law is
where is a design parameter.
In addition, by applying Lemma 6, the following inequalities are obtained:
Substituting (56)–(59) into (55), we have
where , for and , and
Furthermore, considering Lemma 4 and letting , it can be easily seen that there exists a positive constant, , such that . Let , then we have
From (62), there must exist a positive time-varying parameter, , such that
Taking the Laplace transform of (63) yields
where and are the Laplace transforms of and , respectively.
Considering Definition 2, the inverse Laplace transform of (64) is
where the symbol stands for the convolution operator.
As is a non-negative parameter, and from the definition of the two-parameter Mittag-Leffler function (2), it can be directly obtained that . As a result, from (65), we have . Thus, the equation (65) is changed is
On the other hand, for all , one has and . Then, from Lemma 2, there must exist a constant, , such that the following inequality holds:
With , we have
Observing (68), for any , there exists a time instant for all , such that
Furthermore, considering Lemma 1 and letting , one has
In view of the fact that , then (70) can be rewritten as
Similarly, from (71), for any , there exists a time instant for all , such that the following inequality satisfies
In addition, we can select appropriate design parameters such that . Thus, invoking (66), (69) and (72), one obtains
Therefore, according to Lemma 3 and the definition of , once (62) and (72) hold, the boundedness of all signals of the considered strict-feedback fractional-order systems (13) is obtained, and the tracking error can also converge to an arbitrary small neighborhood of the origin, namely, for all . This completes the proof. □
The control block diagram of the system is given in Figure 1.
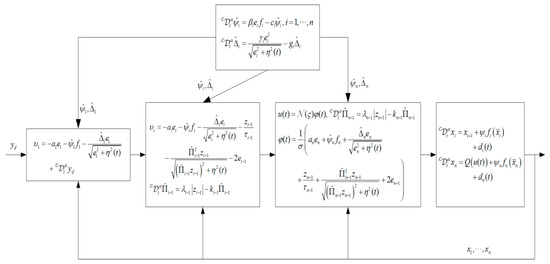
Figure 1.
Block diagram of control system.
Remark 4.
The theoretical analysis shows that the tracking error. Actually, it can be made arbitrarily small by increasing the design parameters,,and, or by decreasing the value ofunder the fixed positive parameters,and. In addition, the control lawcan also be adjusted by changing the value of parameter. However, if the correction parameters are too small, the parameters may drift to some extent, and a smaller tracking error will cause a larger control amplitude. Therefore, the design parameters should be appropriately selected to trade-off between the tracking performance and magnitude of the control signal.
4. Simulation Environment and Methods
In this section, two simulation examples are provided, which were established in the environment of MATLAB/SIMULINK (MathWorks.Inc., Natick, MA, USA) to illustrate the effectiveness of the presented adaptive dynamic surface control law.
Example 1.
Consider the strict-feedback fractional-order nonlinear systems with the following form:
where the fractional order is set to 0.95 and the external disturbances are . The values of the hysteretic quantizer as designed are , and . The initial states are considered to be and the other initial conditions are all given as 0.01. The desired signal is and the simulation time is .
We design the first virtual control law as follows:
To overcome the explosion of complexity in the recursive design, a fractional-order filter is designed as
Furthermore, we design the actual control law and adaptive laws as
where the Nussbaum gain function is given as .
To further illustrate the validity of the presented control law, a third-order fractional-order nonlinear system is given in Example 2.
Example 2.
Consider the fractional-order systems with the following form:
Let the external disturbances . The values of the hysteretic quantizer as designed are , and . The initial states are considered to be and the others are all set to 0.01. The desired signal is and the simulation time is .
In order to achieve the control goal, the design parameters in the virtual control laws (see (21) and (32)), adaptive laws (see (25), (26), (33), (34), (44), (45) and (56)), actual control law (see (41)–(43)) and fractional-order filter (see (23) and (32)) were set to , , , , , , , , , , , , , , , , , , , and .
5. Results and Discussion
Based on the examples in Section 4, the simulation results and discussion are provided in this section.
Considering Example 1, the simulation results are shown in Figure 2, Figure 3, Figure 4, Figure 5, Figure 6 and Figure 7.
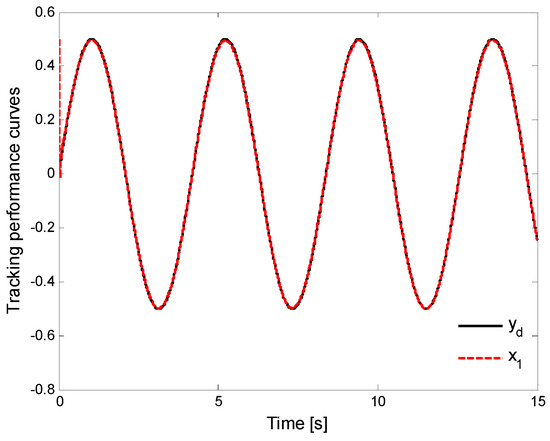
Figure 2.
Trajectories of system output and desired signal .
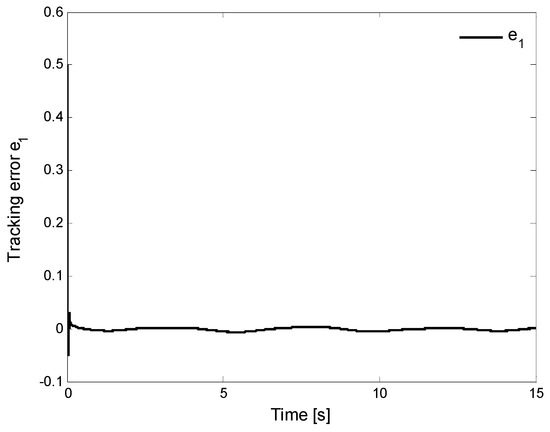
Figure 3.
Trajectory of tracking error .
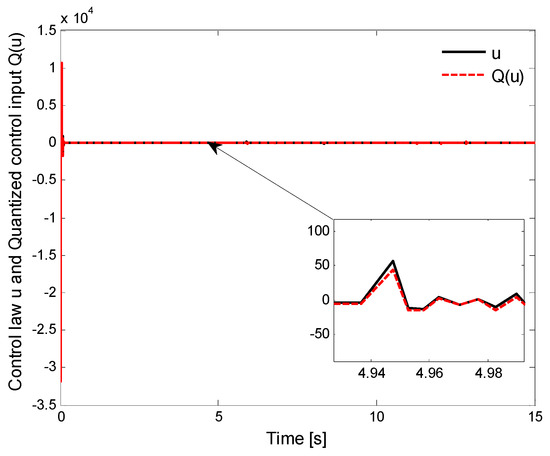
Figure 4.
Trajectories of control law and quantized control input .
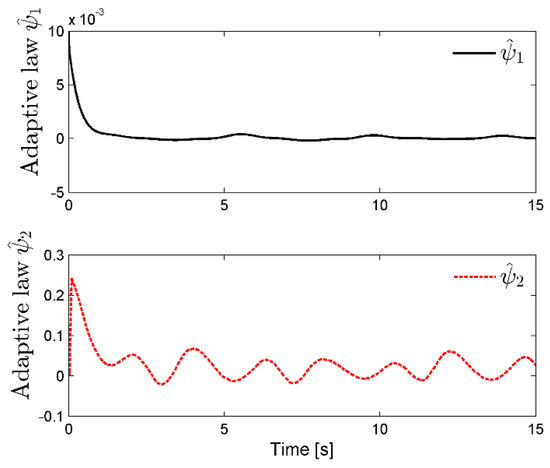
Figure 5.
Trajectories of adaptive law ().
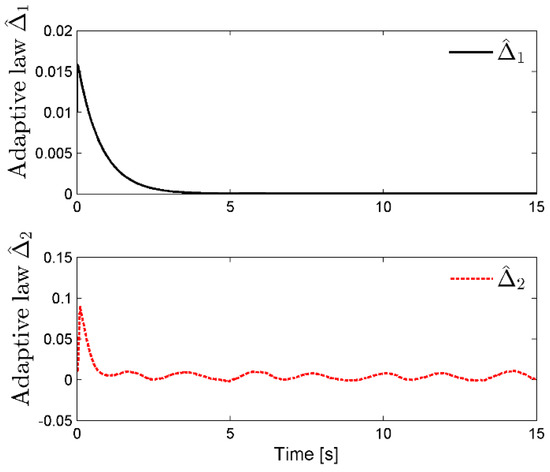
Figure 6.
Trajectories of adaptive law ().
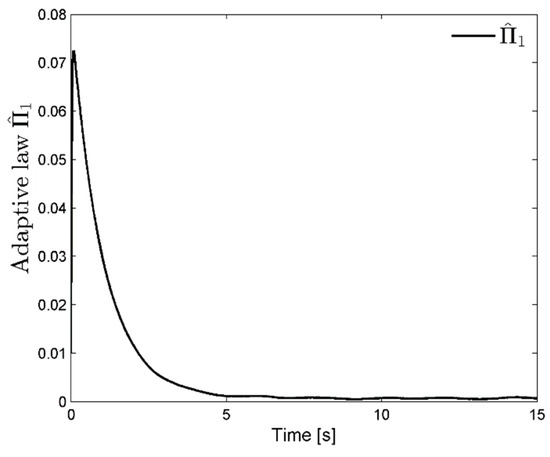
Figure 7.
Trajectory of adaptive law .
Figure 2 and Figure 3 give the trajectories of the tracking performance and tracking error, respectively, and demonstrate that the system (74) could be stabilized quickly under the presented control law. In addition, it can be seen from Figure 2 and Figure 3 that the tracking error could converge on the small neighborhood of the origin. In other words, although the system was affected by external disturbances and input quantization, the designed control law for system (74) in this paper could still achieve good control performance, which showed the effectiveness of the proposed control law. Figure 4 shows the trajectories of the control law and quantized control input, which firmly verified the fact mentioned in Remark 4, that is, a compromise was achieved between a high control gain and tracking error. In addition, the trajectories of adaptive laws , and are shown in Figure 5, Figure 6 and Figure 7, respectively.
Considering Example 2, the simulation results are given in Figure 8, Figure 9, Figure 10, Figure 11, Figure 12 and Figure 13.
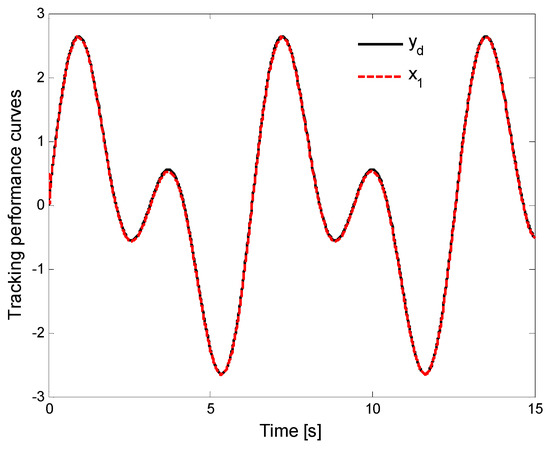
Figure 8.
Trajectories of system output and desired signal .
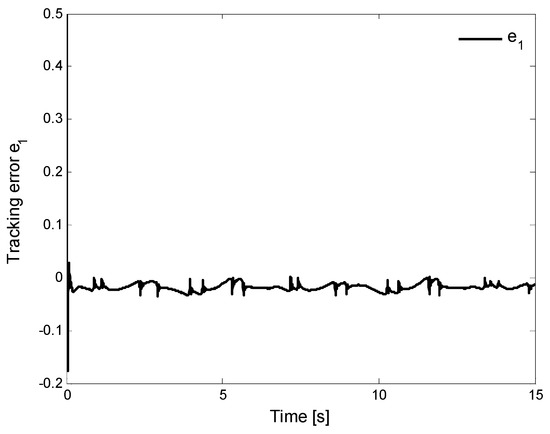
Figure 9.
Trajectory of tracking error .
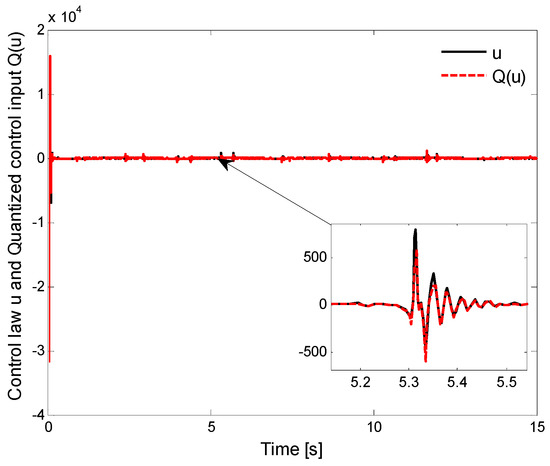
Figure 10.
Trajectories of control law and quantized control input .
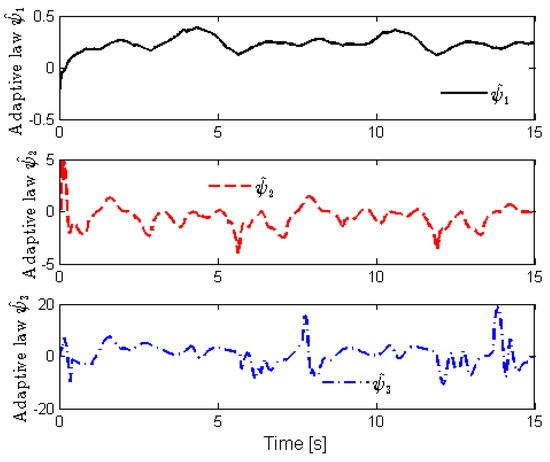
Figure 11.
Trajectories of adaptive law ().
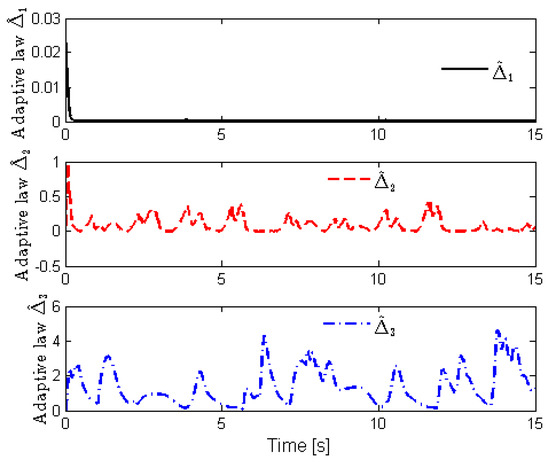
Figure 12.
Trajectories of adaptive law ().
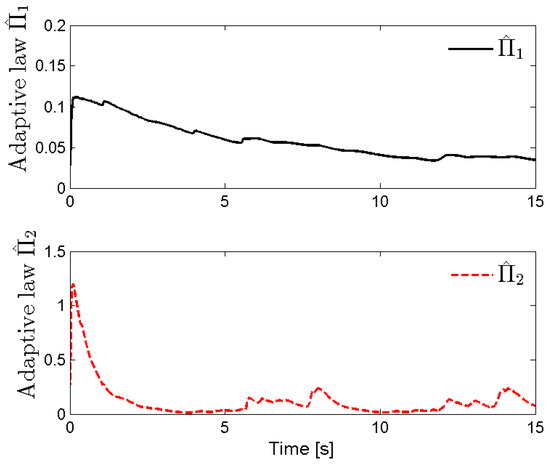
Figure 13.
Trajectories of adaptive law ().
The trajectories of the tracking performance and the tracking error are shown in Figure 8 and Figure 9, respectively. It can be seen that the designed control law could achieve good tracking performance, and that the tracking error could converge on the small neighborhood of the origin. This also verified the validity of the theoretical analysis from another perspective. Figure 10 shows the trajectories of the control law and quantized control input. Similarly, there was a trade-off between a high control gain and tracking error. In addition, Figure 11, Figure 12 and Figure 13 show the trajectories of adaptive laws , and , respectively.
Remark 5.
From the two examples, it can be seen that the desired tracking control could be achieved using the designed control law. Although external disturbances and input quantization were considered, better tracking performance was obtained in this paper. From the figures of the two examples, it can be seen that the boundedness of all signals of the considered system were maintained and the tracking error could converge on the small neighborhood of the origin. Meanwhile, we should pay attention to the reasonable trade-off between a good tracking effect and control gain when selecting appropriate design parameters.
6. Conclusions
This paper discussed the adaptive tracking control problem of a type of strict-feedback fractional-order nonlinear system with input quantization and external disturbances. An adaptive dynamic surface control law was successfully designed. The validity of the designed control law was proved by theoretical analysis. Furthermore, two examples were given to verify the effectiveness of the theoretical analysis results. Simulation results showed that the given fractional-order systems could achieve good control performance. Moreover, all signals of these two given systems were bounded and the tracking error could converge on an arbitrary small neighborhood of the origin. Further research will focus on how to extend the presented control law to strict-feedback fractional-order systems with event-triggered inputs.
Author Contributions
Conceptualization, X.D.; formal analysis, F.Z., X.D., L.W.; funding acquisition, X.D., L.W.; investigation, F.Z., X.D. and L.W.; methodology, X.D. and L.W.; project administration, F.Z. and L.W.; resources, X.D. and L.W.; software, F.Z. and X.D.; supervision, L.W.; validation, X.D.; visualization, F.Z. and L.W.; writing—original draft, X.D.; writing—review and editing, F.Z., X.D. and L.W. All authors have read and agreed to the published version of the manuscript.
Funding
This work was partially supported by the Natural Science Research of Colleges and Universities of Anhui Province under grant KJ2020A0344 and KJ2020ZD39, and the Program for the Top Talents of Anhui Polytechnic University.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Luo, Y.; Chen, Y.; Pi, Y. Experimental study of fractional order proportional derivative controller synthesis for fractional order systems. Mechatronics 2011, 21, 204–214. [Google Scholar] [CrossRef]
- Cao, J.; Ma, C.; Jiang, Z.; Liu, S. Nonlinear dynamic analysis of fractional order rub-impact rotor system. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1443–1463. [Google Scholar] [CrossRef]
- Lu, J. Chaotic dynamics and synchronization of fractional-order Arneodos systems. Chaos Solitons Fractals 2005, 26, 1125–1133. [Google Scholar] [CrossRef]
- Izaguirre-Espinosa, C.; Munoz-Vazquez, A.J.; Sanchez-Orta, A.; Parra-Vega, V.; Fantoni, I. Fractional-order control for robust position/yaw tracking of quadrotors with experiments. IEEE Trans. Control Syst. Technol. 2019, 27, 1645–1650. [Google Scholar] [CrossRef]
- Tang, Y.; Zhang, X.; Zhang, D.; Zhao, G.; Guan, X. Fractional order sliding mode controller design for antilock braking systems. Neurocomputing 2013, 111, 122–130. [Google Scholar] [CrossRef]
- Zhe, Z.; Jing, Z. Asymptotic stabilization of general nonlinear fractional-order systems with multiple time delays. Nonlinear Dyn. 2020, 102, 605–619. [Google Scholar] [CrossRef]
- Ha, S.; Chen, L.; Liu, H.; Zhang, S. Command filtered adaptive fuzzy control of fractional-order nonlinear systems. Eur. J. Control 2022, 63, 48–60. [Google Scholar] [CrossRef]
- Li, Y.; Wei, M.; Tong, S. Event-triggered adaptive neural control for fractional-order nonlinear systems based on finite-time scheme. IEEE Trans. Cybern. 2022, 52, 9481–9489. [Google Scholar] [CrossRef]
- Liu, H.; Cheng, L.; Tan, M.; Hou, Z. Exponential finite-time consensus of fractional-order multiagent systems. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1549–1558. [Google Scholar] [CrossRef]
- Ni, J.; Liu, L.; Liu, C.; Hu, X. Fractional order fixed-time nonsingular terminal sliding mode synchronization and control of fractional order chaotic systems. Nonlinear Dyn. 2017, 89, 2065–2083. [Google Scholar] [CrossRef]
- Liu, H.; Li, S.; Cao, J.; Li, G.; Alsaedi, A.; Alsaadi, F.E. Adaptive fuzzy prescribed performance controller design for a class of uncertain fractional-order nonlinear systems with external disturbances. Neurocomputing 2017, 219, 422–430. [Google Scholar] [CrossRef]
- Liang, B.; Zheng, S.; Ahn, C.; Liu, F. Adaptive fuzzy control for fractional-order interconnected systems with unknown control directions. IEEE Trans. Fuzzy Syst. 2022, 30, 75–87. [Google Scholar] [CrossRef]
- Liu, H.; Li, S.; Wang, H.; Sun, Y. Adaptive fuzzy control for a class of unknown fractional-order neural networks subject to input nonlinearities and dead-zones. Inf. Sci. 2018, 454–455, 30–45. [Google Scholar] [CrossRef]
- Li, X.; Zhan, Y.; Tong, S. Adaptive neural network decentralized fault-tolerant control for nonlinear interconnected fractional-order systems. Neurocomputing 2022, 488, 14–22. [Google Scholar] [CrossRef]
- Song, S.; Park, J.H.; Zhang, B.; Song, X.; Zhang, Z. Adaptive command filtered neuro-fuzzy control design for fractional-order nonlinear systems with unknown control directions and input quantization. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7238–7249. [Google Scholar] [CrossRef]
- Peng, J.; Dubay, R. Adaptive fuzzy backstepping control for a class of uncertain nonlinear strict-feedback systems based on dynamic surface control approach. Expert Syst. Appl. 2019, 120, 239–252. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, X.; Zhang, S.; Zong, G. Adaptive neural backstepping control design for a class of nonsmooth nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1820–1831. [Google Scholar] [CrossRef]
- Koksal, N.; An, H.; Fidan, B. Backstepping-based adaptive control of a quadrotor UAV with guaranteed tracking performance. ISA Trans. 2020, 105, 98–110. [Google Scholar] [CrossRef]
- Wang, C.; Lin, Y. Multivariable adaptive backstepping control: A norm estimation approach. IEEE Trans. Autom. Control 2012, 57, 989–995. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.; Cao, J.; Wang, H.; Zhou, Y. Adaptive neural network backstepping control of fractional-order nonlinear systems with actuator faults. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 5166–5177. [Google Scholar] [CrossRef] [PubMed]
- Song, S.; Zhang, B.; Xia, J.; Zhang, Z. Adaptive backstepping hybrid fuzzy sliding mode control for uncertain fractional-order nonlinear systems based on finite-time scheme. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1559–1569. [Google Scholar] [CrossRef]
- Li, X.; Wen, C.; Zou, Y. Adaptive backstepping control for fractional-order nonlinear systems with external disturbance and uncertain parameters using smooth control. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7860–7869. [Google Scholar] [CrossRef]
- Deng, X.; Zhang, C.; Ge, Y. Adaptive neural network dynamic surface control of uncertain strict-feedback nonlinear systems with unknown control direction and unknown actuator fault. J. Frankl. Inst. 2022, 359, 4054–4073. [Google Scholar] [CrossRef]
- Edalati, L.; Sedigh, A.K.; Shooredeli, M.A.; Moarefianpour, A. Adaptive fuzzy dynamic surface control of nonlinear systems with input saturation and time-varying output constraints. Mech. Syst. Signal Process. 2018, 100, 311–329. [Google Scholar] [CrossRef]
- Parsa, P.; Akbarzadeh-T, M.-R.; Baghbani, F. Command-filtered backstepping robust adaptive emotional control of strict-feedback nonlinear systems with mismatched uncertainties. Inf. Sci. 2021, 579, 434–453. [Google Scholar] [CrossRef]
- Wang, H.; Kang, S.; Zhao, X.; Xu, N.; Li, T. Command filter-based adaptive neural control design for nonstrict-feedback nonlinear systems with multiple actuator constraints. IEEE Trans. Cybern. 2021, 52, 12561–12570. [Google Scholar] [CrossRef]
- Ma, Z.; Ma, H. Adaptive fuzzy backstepping dynamic surface control of strict-feedback fractional-order uncertain nonlinear systems. IEEE Trans. Fuzzy Syst. 2020, 28, 122–133. [Google Scholar] [CrossRef]
- Song, S.; Zhang, B.; Song, X.; Zhang, Z. Adaptive neuro-fuzzy backstepping dynamic surface control for uncertain fractional-order nonlinear systems. Neurocomputing 2019, 360, 172–184. [Google Scholar] [CrossRef]
- Liu, H.; Pan, Y.; Cao, J. Composite learning adaptive dynamic surface control of fractional-order nonlinear systems. IEEE Trans. Cybern. 2020, 50, 2557–2567. [Google Scholar] [CrossRef]
- Deng, X.; Wei, L. Adaptive neural network finite-time control of uncertain fractional-order systems with unknown dead-zone fault via command filter. Fractal Fract. 2022, 6, 494. [Google Scholar] [CrossRef]
- Ha, S.; Chen, L.; Liu, H. Command filtered adaptive neural network synchronization control of fractional-order chaotic systems subject to unknown dead zones. J. Frankl. Inst. 2021, 358, 3376–3402. [Google Scholar] [CrossRef]
- Shao, K.; Zheng, J.; Tang, R.; Li, X.; Man, Z.; Liang, B. Barrier function based adaptive sliding mode control for uncertain systems with input saturation. IEEE/ASME Trans. Mechatron. 2022, 1–11. [Google Scholar] [CrossRef]
- Yang, J.; Bu, X.; Yu, Q.; Zhu, F. Observer-based controller design for nonlinear semi-Markov switched system with external disturbance. J. Frankl. Inst. 2020, 357, 8435–8453. [Google Scholar] [CrossRef]
- Xu, B.; Liang, Y.; Li, Y.; Hou, Z. Adaptive command filtered fixed-time control of nonlinear systems with input quantization. Appl. Math. Comput. 2022, 427, 127186. [Google Scholar] [CrossRef]
- Tan, Y.; Xiong, M.; Du, D.; Fei, S. Observer-based robust control for fractional-order nonlinear uncertain systems with input saturation and measurement quantization. Nonlinear Anal. Hybrid Syst. 2019, 34, 45–57. [Google Scholar] [CrossRef]
- Ma, H.; Liang, H.; Zhou, Q.; Ahn, C.K. Adaptive dynamic surface control design for uncertain nonlinear strict-feedback systems with unknown control direction and disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 506–515. [Google Scholar] [CrossRef]
- Lv, M.; de Schutter, B.; Shi, C.; Baldi, S. Logic-based distributed switching control for agents in power-chained form with multiple unknown control directions. Automatica 2022, 137, 110143. [Google Scholar] [CrossRef]
- Sheng, D.; Wei, Y.; Cheng, S.; Shuai, J. Adaptive backstepping control for fractional order systems with input saturation. J. Frankl. Inst. 2017, 354, 2245–2268. [Google Scholar] [CrossRef]
- Bigdeli, N.; Ziazi, H.A. Finite-time fractional-order adaptive intelligent backstepping sliding mode control of uncertain fractional-order chaotic systems. J. Frankl. Inst. 2017, 354, 160–183. [Google Scholar] [CrossRef]
- Yu, Z.; Yang, Y.; Li, S.; Sun, J. Observer-based adaptive finite-time quantized tracking control of nonstrict-feedback nonlinear systems with asymmetric actuator saturation. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 4545–4556. [Google Scholar] [CrossRef]
- Liu, Y. Adaptive dynamic surface asymptotic tracking for a class of uncertain nonlinear systems. Int. J. Robust Nonlinear Control 2017, 28, 1233–1245. [Google Scholar] [CrossRef]
- Wang, C.; Wen, C.; Lin, Y.; Wang, W. Decentralized adaptive tracking control for a class of interconnected nonlinear systems with input quantization. Automatica 2017, 81, 359–368. [Google Scholar] [CrossRef]
- Huo, X.; Ma, L.; Zhao, X.; Zong, G. Observer-based fuzzy adaptive stabilization of uncertain switched stochastic nonlinear systems with input quantization. J. Frankl. Inst. 2019, 356, 1789–1809. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).