Abstract
In the paper, the Linear–Quadratic–Gaussian (LQG) control strategy in regulatory mode (disturbance attenuation, zero value of the reference signal) in single-loop control is used to stabilize the system equipped in a non-integer order plant. The influence of the optimal controller design sophistication on control quality in terms of output variance is examined. It has been shown that the optimal implementation length of fractional-order difference is relatively low (several dozen in considered examples). Therefore, further increasing the controller’s complexity in terms of approximation length does not improve the control performance. Furthermore, it is presented that, under bounded control signal variance, the optimal fractional order of the controller may be significantly different from the actual fractional order of the plant (in the examples, the difference is up to 0.66).
1. Introduction
Since fractional-order systems reach considerable research attention, the problem of fractional-order systems control has become one of the essential issues in control theory and practice [1,2,3]. One of the most interesting research directions in this field is designing fractional-order generalization of Proportional–Integral–Derivative PID controllers. The main advantage of this approach is that we have two additional parameters to tune, which are fractional orders of the derivative and integrator. Proper selection of these orders can significantly increase the controller performances, such as accuracy and robustness [4,5,6,7,8,9,10]. Therefore, we can find various approaches related to fractional-order PID controllers, including tuning methods [11,12,13,14,15], implementation algorithms [9,13,16,17], and applications [5,18,19,20].
The second area of fractional control methods involves advanced control schemes based on fractional-order models. Like these methods, we consider predictive/adaptive controllers [21,22], linear–quadratic or linear–quadratic–Gaussian regulators [23,24,25], internal-model-control [26], and many other control schemes [27,28,29]. The main problem encountered in fractional model-based controllers is that fractional-order elements are not applicable in practice due to (infinite) computational complexity. Therefore, there are two main directions to solve this problem in the model-based control design. The first, more popular strategy is using a finite-length approximation of a fractional-order difference incorporated into the fractional-order system [21,22]. In the second case, a control algorithm is based on an integer-order approximation of the whole fractional-order system. Note that both methods may lead to good control performances, e.g., in the case of a various predictive control scheme [21,30,31].
The optimal control problem for fractional systems in terms of the linear quadratic regulator is considered in [25,32]. The proposed techniques are based on continuous-time Caputo and Riemann–Liouville derivatives. As an alternative approach, the well-known method designed for discrete-time fractional-order systems based on the Grünwald–Letnikov difference is presented in [33,34]. Furthermore, the fractional-order Linear–Quadratic–Gaussian controller is investigated in terms of control performance assessment in [35,36]. However, the LQG scheme acts as a benchmark of other control algorithms’ quality in this context. Another fractional-order LQG approach of Ref. [37] considers integer-order plants with the fractional-order model of disturbance path. In contrast, this paper proposes the LQG control strategy applied to stabilize the non-integer order system interfered with the integer-order noise. The controller is designed for the single control loop being in regulatory mode (disturbance attenuation, zero reference signal value). The proposed algorithm is, in some sense, the fractional-order generalization of LQG methods considered in Refs. [38,39,40]. The influence of the optimal controller design sophistication on control quality in terms of output variance is examined. It has been shown that increasing the complexity of the controller in terms of derivative approximation length does not lead to control performance improvement. Furthermore, it is presented that under bounded control signal variance, the controller’s optimal fractional order may differ from the actual fractional order of the plant. The same conclusions are confirmed for different fractional-order systems.
The paper is organized as follows. After the short introduction to control problems of fractional-order systems in Section 1, Section 2 formulates the fractional-order system, which is the basis for the considered LQG controller. The designing process of the LQG controller for the fractional-order system is presented in Section 3. Finally, Section 4 shows the simulation experiments for two different examples of the fractional-order system, and Section 5 concludes the paper.
2. Problem Statement
It is assumed that the linear SISO control process is modeled by the following continuous-time systems describing, respectively, the integer-order stochastic disturbance path:
and fractional-order control path:
where and are state vectors of the plant and disturbance, respectively, is the control signal obtained from the output of a ZOH device driven by digital controller output, is a Wiener process. is a fractional-order derivative defined by the use of Grünwald–Letnikov definition as
with h being the sampling interval, , and being the fractional-order difference calculated as
and
The fractional-order difference including sampling period h is as follows
and finally can be easily presented in (normalized) discrete-time as
Taking into account the fractional-order difference (7), the system of Equation (2) can be discretized as
where and . In finite time k the system (8) can be presented in equivalent form
where
with , .
The discrete-time model of the disturbance path can be presented in the form of
where and is the vector of (Gaussian) white noise with and
Combining Equations (9) and (13), we can introduce the discrete-time model of the entire system as
where and
Finally, the system output is as follows
where is the (Gaussian) white noise of and , which represents the measurement error in the time instants k. The block diagram of the system is depicted in Figure 1.
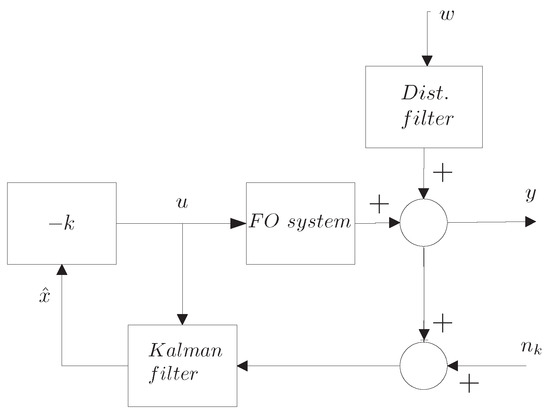
Figure 1.
Block diagram of the controlled system.
3. Controller Design
In the LQG control concept, the control signal is selected as an optimal value of the following performance index
where
The input signal in the LQG control scheme is as
where the optimal value of the feedback gain vector with respect to the performance index can be obtained as
where S is calculated from following algebraic Riccati equation
The stationary Kalman filter for the system of Equation (15) is as follows
where
4. Output Variance
The measure which is used to assess the optimal controller efficiency in terms of disturbance attenuation is the output variance. To determine the formula describing this parameter, presentation of the closed system in the state space form is required as follows
where
with , , and , , are the plant and controller parameters, respectively.
The state covariance matrix of the closed-loop system can be obtained as the solution of the discrete Lyapunov equation
Using the solution of Equation (38), we finally arrive at variance of the output signal
5. Simulation Results
In this section, we analyze LQG controller performance for two various fractional-order state space systems. These systems differ in complexity and dynamical properties. Since the standard deviation is a parameter that better characterizes signal amplitude, it was used in our case instead of signal variance.
Example 1.

Consider state space system of order with matrices as follows
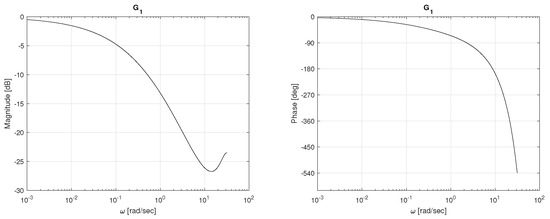
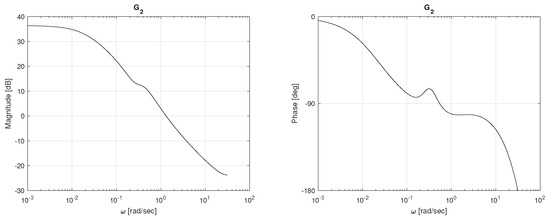
The above system has also been considered in Ref. [39]. The Bode plots of the plant are presented in Figure 2.
Figure 2.
Frequency characteristics of the investigated systems—magnitude (left), phase (right).
The system is affected by white noise additive output disturbance. The disturbance is filtered by an integer-order IIR filter given by the transfer function
The value of is selected such that the noise variance equals 1. Coefficient determines disturbance bandwidth, chosen as 2 in the paper. The system is controlled by an LQG controller designed using the methodology of Section 3. As is presented in the previous section, we consider discrete-time equivalent to the closed-loop system with a sampling period .
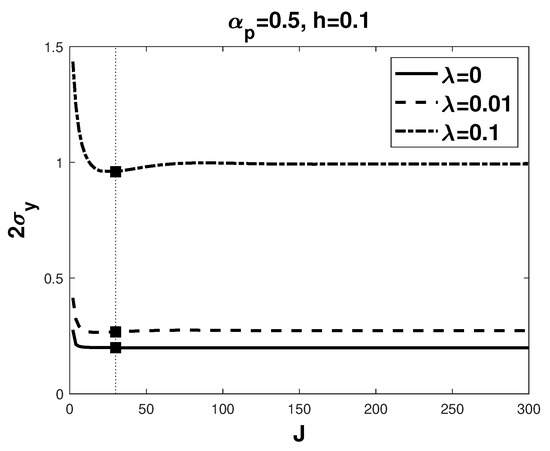
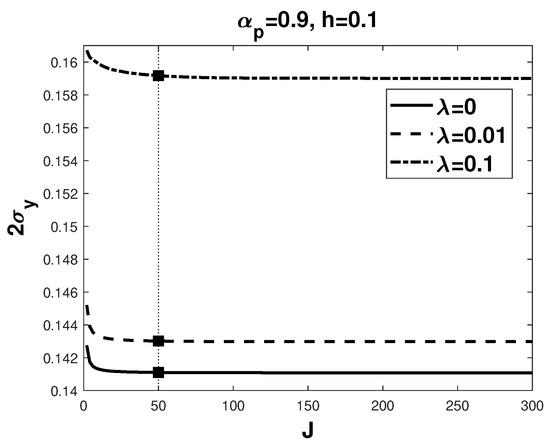
In Figure 3 there are presented output signal standard deviations of the controlled system (40), as a function of implementation length of the fractional discrete-time difference to obtain the unrestricted structure LQG controller. The results are plotted assuming various control effort .
Figure 3.
against J with limits on the control signal.
It is shown in Figure 3 that increasing implementation length for does not improve the control performance. Therefore, as long as the system is controlled with the LQG algorithm, there is no sense to increase its complexity by calculating long horizon fractional derivatives. In terms of output signal variance, the best control performance was achieved , whereas the simulation time is 300 samples.
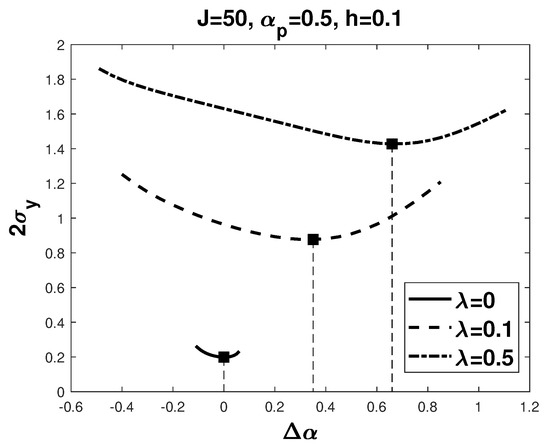
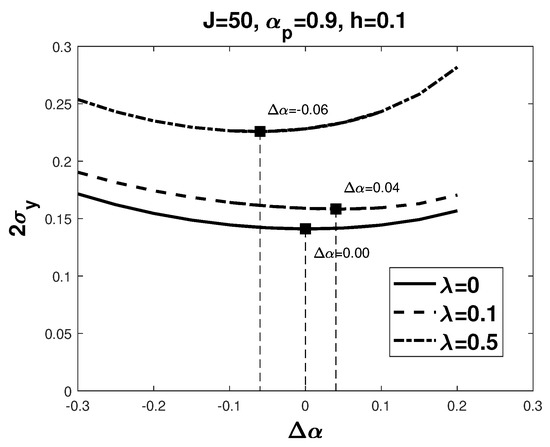
Figure 4 reflects the standard deviation of the output signal, which indicates the control performance of the investigated system, as the function of the order of the fractional-order difference variability in the controller synthesis . The factor is defined as , where and are fractional order of the controller and the plant, respectively.
Figure 4.
against with limits on the control signal.
As is illustrated in Figure 4, the highest performance under different control restrictions λ is indicated. It is interesting that the optimal for only. For , the optimal fractional order of the controller significantly differs from the original order of the plant. For , we have optimal , and for we have , respectively. Therefore, assuming that there is no extreme demand on performance, there is an area of uncertainty for estimating the exact value of the fractional difference order. Even the imprecisely estimated order keeps the LQG system robust and can ensure reasonable control performance.
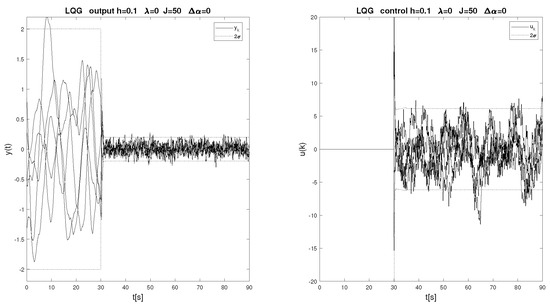
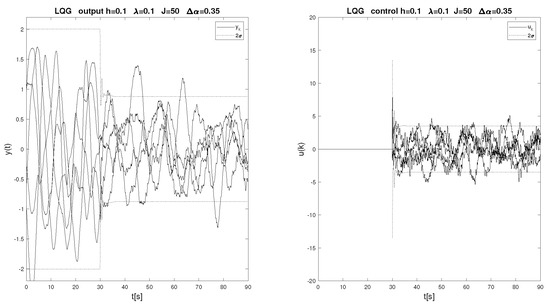
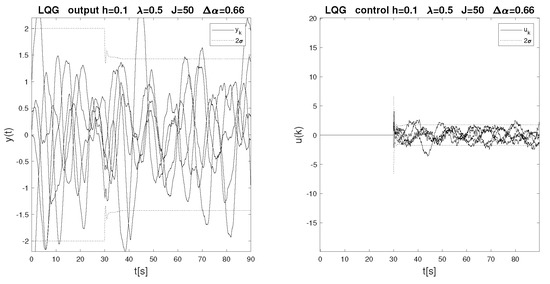
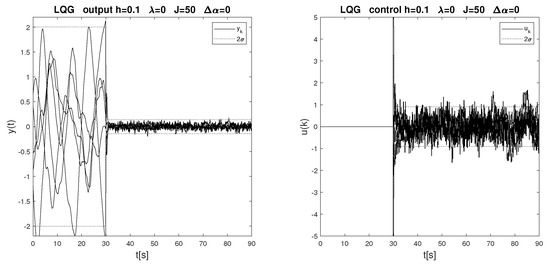
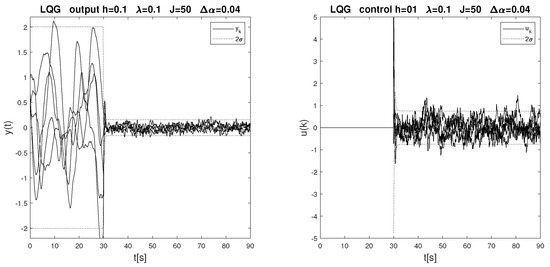
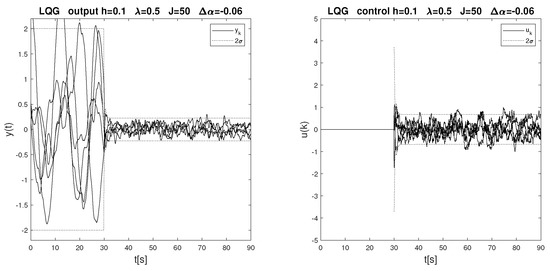
Figure 5, Figure 6 and Figure 7 reflect the realizations of the system equipped with an LQG controller corresponding to the high-performance set points pointed out in Figure 4. Both output and control signals are illustrated and designated areas.
Figure 5.
Realization of the output (left) and control signal (right) for and .
Figure 6.
Realization of the output (left) and control (right) signal for and .
Figure 7.
Realization of the output (left) and control (right) signal for and .
The impact of both weighting factor λ and controller accuracy in terms of derivative order α on control quality can be seen in Figure 5, Figure 6 and Figure 7.
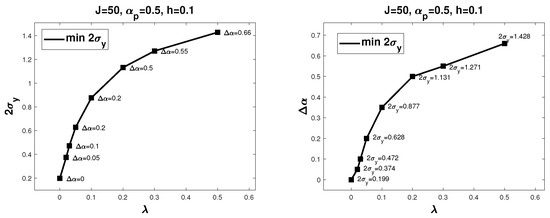
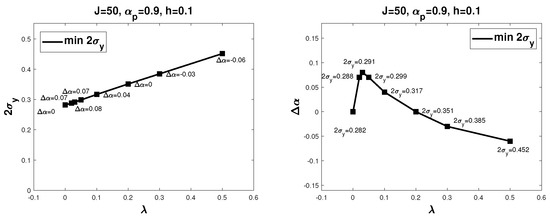
In Figure 8, the output variance of LQG control for optimal is presented as the function of the λ factor. Additionally, Figure 8 presents the optimal values of against λ.
Figure 8.
High performance control (minimal output variance—reflected by 2) against corresponding for various values (left), and the as a function of penalty factor.
Interestingly, bounded control effort significantly affects the optimal value of fractional order included in the LQG controller. The increasing value of λ increases in optimal order of the controller. For , we have . So, the fractional order of the LQG controller , however is still 0.5. Results of this example are summarized in Table 1. Note that in the monotonic function in the considered example. Of course, the variance of the output signal depends on λ, which is a well-known property in LQR control.
Table 1.
Simulation results of Example 1.
Example 2.
Consider the fractional-order state space system of order with matrices as follows
The above system was considered in Ref. [41]. The Bode plots of the plant are presented in Figure 9. We can see in Figure 9 that the system considers a high-frequency oscillatory mode. As in Example 1, the system is affected by white noise additive output disturbance. The disturbance is filtered by an integer-order IIR filter given by the transfer function (41). The system is controlled by an LQG controller designed using the methodology of Section 3. Again, we consider a discrete-time equivalent to the closed-loop system with sampling period .
Figure 9.
Frequency characteristics of the investigated systems—magnitude (left), phase (right).
In Figure 10 there are presented output signal standard deviations of the controlled system (40), as a function of implementation length of the fractional discrete-time difference to obtain the unrestricted structure LQG controller. The results are plotted assuming various control efforts .
Figure 10.
against J with limits on control signal.
It has been shown in Figure 10 that, similarly to Example 1, increasing implementation length for does not improve the control performance. Therefore, as long as the system is controlled with the LQG algorithm, there is no sense in increasing its complexity by calculating long horizon fractional derivatives. In terms of output signal variance, the best control performance was achieved .
Figure 11 reflects the standard deviation of the output signal, which indicates the control performance of the investigated system, as the function of .
Figure 11.
against with limits on the control signal.
As is illustrated in Figure 11, the highest performance under different control restrictions λ is indicated. A, in Example 1, the optimal for only. For , the optimal fractional order of the controller differs from the original order of the plant. For we have optimal , and for we have , respectively. In contrast to the Example 1, the optimal value of is not proportional to the value of λ, and we cannot create function in this specific example.
Figure 12, Figure 13 and Figure 14 reflect the realizations of the system equipped with an LQG controller corresponding to the high-performance set points pointed on the Figure 11. There are illustrated output and control signals and designated areas. It can be seen in Figure 12, Figure 13 and Figure 14 that in this case we obtain similar results to obtained with Example 1.
Figure 12.
Realization of the output (left) and control (right) signal for and .
Figure 13.
Realization of the output (left) and control (right) signal for and .
Figure 14.
Realization of the output (left) and control (right) signal for and .
In Figure 15, the output variance of LQG control for optimal is presented as the function of λ factor, as well as the optimal values of against λ.
Figure 15.
High performance control (minimal output variance—reflected by 2) against corresponding for various values (left), and the as a function of penalty factor (right).
It can be seen in Figure 15 that, as in Example 1, the value of λ affects the optimal value of fractional order included in the LQG controller, but in contrast to Example 1 the function in not monotonic. Again, the variance of the output signal depends on λ. Results of this example are summarized in Table 2.
Table 2.
Simulation results of Example 2.
6. Conclusions
In the paper, the problem of estimation length and accuracy of the fractional-order system on the control performance under the LQG control strategy is investigated. It has been shown that if the FO system is controlled with the LQG algorithm, there is no sense to use a very sophisticated long horizon discrete–time model of the system to design the controller. Increasing the controller complexity in terms of derivative approximation does not reflect further performance improvement of the system. The fractional-order estimation gives the area of uncertainty while maintaining stability. This area gives insight into system robustness driven by the LQG controller. It has also been shown that under the bounded control signal, the highest control performance was achieved when the fractional order of the controller varied from this coming from the original FO plant. In the paper, we consider LQG control of the fractional-order system with the integer-order filter in the disturbance path. Therefore, the next steps of our work will be concentrated on the more general system case also including a fractional-order filter for disturbances.
Author Contributions
Conceptualization, G.B. and R.S.; methodology, G.B. and R.S.; software, G.B.; validation, G.B. and R.S.; formal analysis, G.B. and R.S.; investigation, G.B. and R.S.; writing—original draft preparation, G.B. and R.S.; writing—review and editing, G.B. and R.S.; visualization, G.B.; supervision, R.S.; project administration, G.B. and R.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ali, M.S.; Narayanan, G.; Nahavandi, S.; Wang, J.; Cao, J. Global dissipativity analysis and stability analysis for fractional-order quaternion-valued neural networks with time delays. IEEE Trans. Syst. Man Cybern. Syst. 2021, 1–11. [Google Scholar] [CrossRef]
- Ali, M.S.; Narayanan, G.; Sevgen, S.; Shekher, V.; Arik, S. Global stability analysis of fractional-order fuzzy bam neural networks with time delay and impulsive effects. Commun. Nonlinear Sci. Numer. Simul. 2019, 78, 104853. [Google Scholar]
- Hymavathi, M.; Muhiuddin, G.; Ali, M.S.; Al-Amri, J.F.; Gunasekaran, N.; Vadivel, R. Global exponential stability of fractional order complex-valued neural networks with leakage delay and mixed time varying delays. Fractal Fract. 2022, 6, 140. [Google Scholar] [CrossRef]
- Bettou, K.; Charef, A. Control quality enhancement using fractional PIλDμ controller. Int. J. Syst. Sci. 2009, 40, 875–888. [Google Scholar] [CrossRef]
- Dumlu, A.; Erenturk, K. Trajectory tracking control for a 3-DOF parallel manipulator using fractional-order PIλDμ control. IEEE Trans. Ind. Electron. 2014, 61, 3417–3426. [Google Scholar] [CrossRef]
- Meng, F.; Liu, S.; Pang, A.; Liu, K. Fractional order pid parameter tuning for solar collector system based on frequency domain analysis. IEEE Access 2020, 8, 148980–148988. [Google Scholar] [CrossRef]
- Seo, S.-W.; Choi, H.-H. Digital implementation of fractional order pid-type controller for boost dc–dc converter. IEEE Access 2019, 7, 142652–142662. [Google Scholar] [CrossRef]
- Shah, P.; Agashe, S. Review of fractional PID controller. Mechatronics 2016, 38, 29–41. [Google Scholar] [CrossRef]
- Stanisławski, R.; Rydel, M.; Li, Z. A new reduced-order implementation of discrete-time fractional-order pid controller. IEEE Access 2022, 10, 17417–17429. [Google Scholar] [CrossRef]
- Yaghi, M.; Önder Efe, M. H2/H∞-neural-based FOPID controller applied for radar-guided missile. IEEE Trans. Ind. Electron. 2020, 67, 4806–4814. [Google Scholar] [CrossRef]
- Ravari, M.A.; Yaghoobi, M. Optimum design of fractional order pid controller using chaotic firefly algorithms for a control cstr system. Asian J. Control 2019, 21, 2245–2255. [Google Scholar] [CrossRef]
- Momani, S.; El-Khazali, R.; Batiha, I.M. Tuning pid and piλdδ controllers using particle swarm optimization algorithm via el-khazali’s approach. AIP Conf. Proc. 2019, 2172, 050003. [Google Scholar]
- Pan, I.; Das, S.; Gupta, A. Handling packet dropouts and random delays for unstable delayed processes in NCS by optimal tuning of PIλDμ controllers with evolutionary algorithms. ISA Trans. 2011, 50, 557–572. [Google Scholar] [CrossRef] [PubMed]
- Ramezanian, H.; Balochian, S. Optimal design a fractional- order PID controller using particle swarm optimization algorithm. Int. J. Control Autom. 2013, 6, 55–67. [Google Scholar]
- Verma, S.K.; Yadav, S.; Nagar, S.K. Optimization of fractional order pid controller using grey wolf optimizer. J. Control Autom. Electr. Syst. 2017, 28, 314–322. [Google Scholar] [CrossRef]
- Bazanella, A.S.; Pereira, L.F.A.; Parraga, A. A new method for PID tuning including plants without ultimate frequency. IEEE Trans. Control Syst. Technol. 2017, 25, 637–644. [Google Scholar] [CrossRef]
- Chevalier, A.; Francis, C.; Copot, C.; Ionescu, C.M.; De Keyser, R. Fractional-order pid design: Towards transition from state-of-art to state-of-use. ISA Trans. 2019, 84, 178–186. [Google Scholar] [CrossRef]
- Sierociuk, D.; Macias, M. Comparison of variable fractional order pid controller for different types of variable order derivatives. In Proceedings of the 14th International Carpathian Control Conference (ICCC), Rytro, Poland, 26–29 May 2013; pp. 334–339. [Google Scholar]
- Sierociuk, D.; Wiraszka, M.S. A new variable fractional-order pi algorithm—This work was supported by the polish national science center with the decision number umo-2014/15/b/st7/00480. IFAC-PapersOnLine 2018, 51, 745–750. [Google Scholar] [CrossRef]
- Sierociuk, D.; Wiraszka, M.S. Variable-order pi control algorithm with order scheduled according to the control error and anti-windup strategy. In Proceedings of the 2019 20th International Carpathian Control Conference (ICCC), Wieliczka, Poland, 26–29 May 2019; pp. 1–5. [Google Scholar]
- Domek, S. Fuzzy predictive control of fractional-order nonlinear discrete-time systems. Acta Mech. Autom. 2011, 5, 23–26. [Google Scholar]
- Stanisławski, R.; Latawiec, K.J.; Łukaniszyn, M.; Gałek, M. Linear finite fractional difference predictors for model predictive control. In Proceedings of the IEEE Multiconference on Systems and Control (MSC), Sydney, Australia, 21–23 September 2015; pp. 341–346. [Google Scholar]
- Ski, A.D.; Czyronis, P.M. Fixed final time and free final state optimal control problem for fractional dynamic systems—Linear quadratic discrete-time case. Bull. Pol. Acad. Sci. Tech. Sci. 2013, 61, 681–690. [Google Scholar]
- Ski, A.D.; Czyronis, P.M. Optimal control problem for fractional dynamic systems—Linear quadratic discrete-time case. In Advances in the Theory and Applications of Non-Integer Order Systems; Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2013; Volume 257, pp. 87–97. [Google Scholar]
- Sierociuk, D.; Vinagre, B.M. Infinite horizon state-feedback LQR controller for fractional systems. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 10824–10829. [Google Scholar]
- Okuya, A.; Kaneko, O. On the data-driven update of the free parameter in the generalized internal model controller by using frit. Trans. Soc. Instrum. Control Eng. 2016, 52, 581–588. [Google Scholar] [CrossRef][Green Version]
- Dabri, A.; Nazari, M.; Butcher, E.A. Adaptive neural-fuzzy inference system to control dynamical systems with fractional order dampers. In Proceedings of the American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 1972–1977. [Google Scholar]
- Mehandiratta, V.; Mehra, M.; Leugering, G. Fractional optimal control problems on a star graph: Optimality system and numerical solution. Math. Control Relat. Fields 2021, 11, 189. [Google Scholar] [CrossRef]
- Yang, Y.; Tan, J.; Yue, D.; Xie, X.; Yue, W. Observer-based containment control for a class of nonlinear multiagent systems with uncertainties. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 588–600. [Google Scholar] [CrossRef]
- Domek, S. Switched fractional state-space predictive control methods for non-linear fractional systems. In Proceedings of the Conference on Non-Integer Order Calculus and Its Applications, Bialystok, Poland, 20–21 September 2018; Lecture Notes in Electrical Engineering. Springer: Cham, Switzerland, 2019; Volume 559, pp. 113–127. [Google Scholar]
- Domek, S. Switched state model predictive control of fractional-order nonlinear discrete-time systems. Asian J. Control. 2013, 15, 658–668. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.Q. Fractional order linear quadratic regulator. In Proceedings of the 2008 IEEE/ASME International Conference on Mechtronic and Embedded Systems and Applications, Beijing, China, 12–15 October 2008; pp. 363–368. [Google Scholar]
- Tejado, I.; Vinagre, D.; Sierociuk, D. State space methods for fractional controllers design. In Handbook of Fractional Calculus with Applications; De Gruyter: Berlin, Germany, 2019; Volume 2, pp. 175–200. [Google Scholar]
- Sierociuk, D. Fractional Order Discrete State-Space System Simulink Toolkit User Guide. 2005. Available online: http://www.ee.pw.edu.pl/~dsieroci/fsst/fsst.pdf (accessed on 27 February 2022).
- Li, H.; Li, R.; Wu, F. A new control performance evaluation based on lqg benchmark for the heating furnace temperature control system. Processes 2020, 8, 1428. [Google Scholar] [CrossRef]
- Li, R.; Wu, F.; Hou, P.; Zou, H. Performance assessment of fo-pid temperature control system using a fractional order lqg benchmark. IEEE Access 2020, 8, 116653–116662. [Google Scholar] [CrossRef]
- Duncan, T.E.; Pasik-Duncan, B. Linear-quadratic fractional gaussian control. SIAM J. Control Optim. 2013, 51, 4504–4519. [Google Scholar] [CrossRef]
- Blachuta, M.J.; Bialic, G. On the impact of plant model and controller sophistication on performance of disturbance attenuation and system robustness. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 3248–3253. [Google Scholar]
- Blachuta, M.J.; Bialic, G. On control performance assessment based on lag-delay models. In Proceedings of the 2005, American Control Conference, Portland, OR, USA, 8–10 June 2005; Volume 1, pp. 374–379. [Google Scholar]
- Li, S.; Zhao, J.; Zhang, Z. Investigation on linear quadratic gaussian control of semi-active suspension for three-axle vehicle. J. Low Freq. Noise Vib. Act. Control 2021, 40, 1633–1648. [Google Scholar] [CrossRef]
- Stanisławski, R.; Rydel, M.; Latawiec, K.J. Modeling of discrete-time fractional-order state space systems using the balanced truncation method. J. Frankl. Inst. 2017, 354, 3008–3020. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).