Abstract
In this paper, the adaptive finite-time control problem for fractional-order systems with uncertainties and unknown dead-zone fault was studied by combining a fractional-order command filter, radial basis function neural network, and Nussbaum gain function technique. First, the fractional-order command filter-based backstepping control method is applied to avoid the computational complexity problem existing in the conventional recursive procedure, where the fractional-order command filter is introduced to obtain the filter signals and their fractional-order derivatives. Second, the radial basis function neural network is used to handle the uncertain nonlinear functions in the recursive design step. Third, the Nussbaum gain function technique is considered to handle the unknown control gain caused by the unknown dead-zone fault. Moreover, by introducing the compensating signal into the control law design, the virtual control law, adaptive laws, and the adaptive neural network finite-time control law are constructed to ensure that all signals associated with the closed-loop system are bounded in finite time and that the tracking error can converge to a small neighborhood of origin in finite time. Finally, the validity of the proposed control law is confirmed by providing simulation cases.
1. Introduction
Over the past several decades, control problems of uncertain nonlinear systems [], nonsmooth nonlinear systems [], strict-/nonstrict-feedback systems [,], and pure-feedback systems [] have been widely studied, and to achieve the specified control objectives, various control laws have been constructed by scholars. It should be pointed out that the order of the above-mentioned systems is integer order, namely, the so-called integer-order systems. In fact, some systems, such as hyper-chaotic economic systems and heat conduction and viscoelastic structures [,], cannot be modeled by integer-order systems. Therefore, as the extension of integer-order systems, the control problems of fractional-order systems have been developed by many scholars. Currently, whether it is the solution problem of fractional calculus or the control problem, the research results of fractional calculus can be found in many literatures [,,,,].
Because fractional-order systems break through the limitation of integer-order systems, they can better describe the historical information of control objects [,], which have attracted more and more attention in recent years [,,]. An adaptive control law based on neural network was presented in [], which guarantees that the tracking error of the switched fractional-order nonlinear systems can converge to a small neighborhood of the origin under arbitrary switching. In [], an adaptive control law for the control problem of fractional-order systems with matched uncertainties and external disturbances was solved. The authors of [] addressed an adaptive sliding mode observer for a class of Takagi–Sugeno fuzzy descriptor fractional-order systems, in which the assumption that the local input matrices are identical was eliminated by applying a fuzzy sliding surface. In addition, some excellent control strategies, such as the adaptive backstepping control law [,], the adaptive event-triggered control law [], the observer-based adaptive fuzzy control law [], the active disturbance rejection control-based backstepping control law [], and their references have also been studied and applied.
It should be emphasized that the occurrence of actuator faults can sometimes not be predicted in advance. How to solve the control problems of fractional-order systems with unknown actuator faults is a problem worth studying. Moreover, for the actual control needs, it is usually hoped that the given systems can achieve the desired control in finite time. However, these problems have not been deeply studied in the above-mentioned literature.
Actuator faults are inevitable in most engineering problems. If these faults are not handled in time, these cases may lead to the weakening of the system’s performance or even the complete failure of the control system. Therefore, it is important and necessary to study the control problems of fault systems (see [,,,,], for example). The same is true for fractional-order systems. Recently, many interesting results have been gained for control schemes for fractional-order systems. In [,], adaptive fault-tolerant control laws with fuzzy logic systems were designed to solve the control problems of fractional-order systems, where the actuator faults involve partial failures, the loss of control effectiveness, and stuck faults. Considering the existence of saturation fault, the adaptive neural network constraint control law for fractional-order nonstrict-feedback systems was addressed in []. In [], a stabilization criterion with linear matrix inequalities was proposed. This guarantees the robust stability of a class of variable-order fractional interval systems. Based on the designed neural network decentralized state observer and decentralized control law, the authors of [] investigated the output–feedback control problem for fractional-order nonstrict-feedback large-scale systems with unknown dead-zone faults. Also, it should be pointed out that the problem of unknown control direction may be triggered when the system appears as an unknown failure. Since the sign of the control direction is unknown, this will bring great difficulties to the design of control laws of the systems. To solve the control problem of unknown control direction, the Nussbaum gain function control technique was proposed [], and many related results have been proposed by scholars to solve the control problems of the systems with unknown control directions [,,,].
It should be noted that the solution to the above control problems is achieved in infinite time. However, some practical engineering applications, such as the chemical reaction process and spacecraft attitude control, need to achieve stability within finite time. Compared with the infinite time control strategy, the finite-time control strategy has a faster convergence rate and better robustness against uncertainty [,,]. Correspondingly, some interesting results on the finite-time control of fractional-order systems were developed in [,,]. Based on the backstepping control technique, a fractional finite-time adaptive fuzzy sliding control scheme for uncertain fractional order systems with uncertainties and external disturbances was designed in []. This ensures that the closed-loop system reaches the desired sliding mode surface in finite time. Different from [], an adaptive finite-time control law with a fractional-order command filter was presented in [], which can eliminate the computational complexity problem in the traditional backstepping design and the tracking error can be guaranteed to converge in a finite time. In [], the finite-time event-triggered control problem for fractional-order systems was studied, and a finite-time control law combined with the event-triggered mechanism and the neural network was proposed.
Moreover, the control problems of fractional-order systems with unknown actuator fault can be found in some papers without further discussion of the finite time control problems [,,]. Although a few studies have investigated the finite-time control problems of fractional-order systems [,,], they did not consider the existence of unknown dead-zone fault. Inspired by the above discussion, the objective of this paper is to address the finite-time control for fractional-order systems with unknown dead-zone fault and uncertain dynamics. Based on the application of the fractional-order command filter, the radial basis function neural network, and the Nussbaum gain function technique, an adaptive neural network finite-time control law was developed. The main contributions of this paper are as follows:
(1) A class of uncertain fractional-order systems with unknown dead-zone fault is investigated. Compared with [,,], the model considered in this paper is more general.
(2) A fractional-order command filter is introduced to obtain the filter signals and their fractional-order derivatives, which avoids the computational complexity problem existing in the conventional backstepping recursive procedure.
(3) To deal with uncertain nonlinear functions in the step of recursive design and unknown control gain caused by the unknown dead-zone fault, the radial basis function (RBF) neural network and Nussbaum gain function technique are applied in this paper. Then, the virtual control laws, adaptive laws and finial adaptive neural network finite-time control law are designed.
(4) By using the designed adaptive neural network finite-time control law, it can be guaranteed that all signals associated with the closed-loop system are bounded in finite time, and the tracking error converges to a small neighborhood of origin in finite time.
The rest of this paper consists of the following sections. The problem formulation and preliminaries are given in Section 2. In Section 3, the main design processes of the control law are provided, and the stability analysis is also shown in this section. In what follows, we give the simulation results and brief conclusions in Section 4 and Section 5, respectively.
Notations: Throughout this paper, , , and represent, respectively, the sets of real numbers, complex numbers, and integers; represents the set of dimensional real vectors; stands for the absolute value of a constant; is the induction norm of a matrix or the Euclidean norm of a vector; stands for the transpose of matrix or vector ; and or represent the minimum value or maximum value of .
2. Problem Formulation and Preliminaries
This section will introduce the problem formulation for uncertain fractional-order systems, and some preliminaries, such as the fractional calculation, Nussbaum gain function technique, and some lemmas are given for the subsequent analysis.
2.1. Problem Formulation
Consider the uncertain fractional-order systems with unknown dead-zone fault, which is described as
where is the fractional order; , , and are the state vector, the control input, and the output of system, respectively; and , , represent the known nonzero smooth functions and uncertain nonlinear functions, respectively; and , for , stand for the unknown constant vectors and known nonlinear function vectors, respectively. For convenience, the functions , and are denoted by , , and , respectively.
In this paper, the control input is subjected to the dead-zone fault, where “” is the first letter of “Fault”. Based on [], is given as
where represents an unknown bounded constant and is defined as the slope of the dead zone; is the left breakpoint of dead-zone, and is the right breakpoint of the dead zone.
By applying the mean value theorem, the control input (2) can be rewritten as
and there exists , where represents the maximum value allowed by the system; is a bounded function that satisfies , and is shown as
For the system (1), the control goal of this paper is to construct an adaptive neural network finite-time control law such that all signals of the closed-loop system are bounded in finite time, and the system output can track the reference signal in finite time.
To achieve the desired control objective, some assumptions are provided as follows.
Assumption 1.
The reference signaland its fractional-order derivativeare smooth and bounded.
Assumption 2.
The smooth functions,are bounded and the signs are identical; namely, there exist positive constantsandsuch that.
Remark 1.
Assumptions 1 and 2 are common in the control law design of fractional-order systems and can be found in most existing results [,,]. Assumption 2 implies that the time-varying control gainsare either strictly positive or strictly negative with the same sign. Moreover, the purpose of introducing positive constantsandis to analyze the boundlessness of all signals and the stability of the system.
2.2. Fractional Calculation
Definition 1
([]). The th Caputo derivative of a smooth function is described as
where denotes the Caputo fractional operator with for ; is the Gamma function, which is given as .
For the Caputo fractional operator, the following properties hold.
where and are constants; and are smooth nonlinear functions.
Remark 2.
In the following analysis, only the case ofis considered. In addition, the notationfor the Caputo operator is replaced by.
Definition 2
([]). The two-parameter Mittag–Leffler function is
where , , and . In particular, . The Laplace transform of (8) is
Lemma 1
([]). There exist and such that if is satisfied, then
where , , and .
Lemma 2
([]). Let be a smooth function, then
Lemma 3
([]). If the fractional derivative of a smooth function satisfies
where , and , then one can obtain
where , and is defined as shown in Lemma 1.
Lemma 4
([]). Consider the fractional-order system , and . If there exist continuous and positive-definite function , functions and , and constants , , with being a constant to be designed, satisfying
and holds with being a sufficient small positive constant, and there exists
where , is the finite setting time, which satisfies
where .
2.3. Nussbaum-Type Gain Function
Definition 3
([]). A function is defined as a Nussbaum-type gain function if the following properties satisfy
Lemma 5
([,]). Let and , for , be smooth functions defined on with for . is a special Nussbaum-type gain function, if the following inequality holds:
where and are constants, and stands for a bounded smooth function that has with and . Then , , and will be bounded on for . Particularly, for i = 1, the boundedness of can be maintained.
To facilitate the analysis of finite time problems, the following lemmas are provided.
Lemma 6
([]). For any continuous function over a compact set , there exists an RBF neural network such that
where is the optimal weight vector, is the neural network node number, is the approximation error and there exists , and represents a Gaussian-like basis function vector with
where and are the center of the basis function and the width of the Gaussian function, respectively.
Lemma 7
([]). A fractional-order second-order command filter with and as its initial conditions is given as
where , , and are the input and output of the fractional-order command filter, respectively. Then for any , there exist and such that in finite time.
Lemma 8
([]). For any real variables and , and any positive constants , , and , the following inequality holds:
Lemma 9
([]). For , and , the following relationship holds:
Lemma 10
([]). Let and ; for the hyperbolic tangent function , there exists .
3. Control Law Design Process and Stability Analysis
For this section, the adaptive neural network finite-time control law for uncertain fractional-order systems with unknown dead-zone fault (1) is proposed. This can not only ensure that all signals of the closed-loop system are bounded in finite time, but it also makes the output of the system track the reference signal in finite time.
3.1. Adaptive Neural Network Finite-Time Control Law Design
We define the following coordinate transformation:
where , for , and is the output of the fractional-order second-order command filter (see Lemma 7) with the virtual control law as the input.
The compensated tracking error is defined as
where is the compensating signal to be designed.
Step 1 (): Considering (1), (24), and (25), the fractional-order derivative of is
According to Lemma 6, an RBF neural network is introduced to approximate the unknown nonlinear function . Then we have
Design the compensating signal as
where and are design constants.
Substituting (27) and (28) into (26) yields
Design the Lyapunov function candidate as
where and are the designed positive constants; and , where and are the estimations of and , respectively. Considering (6), (7), and Lemma 2, the fractional derivative of is given as
Design the virtual control law as
where and .
Substituting (32) into (31) has
Design the adaptive laws and as
where and are design constants.
Substituting (34) and (35) into (33), and considering Lemma 10, gives
Step (): Considering (1), (24), and (25), the fractional derivative of is
Similarly, an RBF neural network is introduced to approximate the unknown nonlinear function . Then we obtain
Design the compensating signal as
where and are design constants.
Substituting (38) and (39) into (37) yields
Design the Lyapunov function candidate as
where and are the designed positive constants; and , where and are the estimations of and , respectively. Then, the fractional derivative of is
Design the virtual control law as
where and .
Substituting (43) into (42) has
Design the adaptive laws and as
where and are design constants.
Substituting (45) and (46) into (44), and considering Lemma 10, one has
Step (): In this step, the adaptive neural network finite-time control law is derived. Considering (1), (3), (24), and (25), the fractional derivative of is given as
The unknown nonlinear function in (48) is approximated by using the RBF neural network, that is
Design the compensating signal as
where and are the design constants.
Substituting (49) and (50) into (48) yields
where and . Considering the boundlessness of , , and , there exist and with unknown constants and .
Design the Lyapunov function candidate as
where and are the designed positive constants; and , where , and are the estimations of and , respectively. The fractional derivative of is given as
Design the adaptive neural network finite-time control law as
Substituting (54)–(56) into (53), one gets
Design the adaptive laws and as
where and are the design constants.
Substituting (58) and (59) into (57), and considering Lemma 10, one obtains
3.2. Stability Analysis
Based on the virtual control laws, adaptive laws, and adaptive neural network finite-time control law designed above, the main results can be summarized as follows.
Theorem 1.
Consider an uncertain fractional-order system (1) that is subject to unknown dead-zone fault (2). Under Assumptions 1 and 2, if the compensating signals are selected as (28), (39), and (50), the virtual control laws are designed as shown in (32) with adaptive laws (34) and (35), and (43) with adaptive laws (45) and (46), and the adaptive neural network finite-time control law is designed as shown in (54) with adaptive laws (58) and (59). Then, all signals of the closed-loop system are bounded in finite time and the tracking errorcan converge to a small neighborhood of origin in finite time.
Proof.
Design the following Lyapunov function as
Invoking (36), (47), and (60), the fractional-order derivative of is
By applying Lemma 8, the following results can be obtained:
Substituting (63)–(65) into (62) yields
where and are positive constants. □
Considering Lemma 8 again, let , or , , and , respectively. Thus, the following inequalities hold
By substituting (67) and (68) into (66), and applying Lemma 9, the following result is satisfied by choosing appropriate parameters satisfying , , and , that is
where , and are respectively given as
Next, we verify our results in three steps.
Step 1. Considering (69) and the definition of , it can be easily obtained that . Then, we have
By applying Lemma 5, there exist a positive constant such that for . Therefore, (69) can be written as
where .
Step 2. Based on the results of Step 1, from (71), we have
Applying Lemma 1 and Lemma 3, then there is a positive constant such that
which means that is bounded, and it further implies that the signals , , and are also bounded. Noting and , then the boundlessness of and can be also obtained.
Step 3. From the definition of , if and are finite-time stable, then the tracking error is also finite-time stable. Considering (71) and the fact that , then we have
By applying Lemma 4, it can be held that
and the setting time is
where and .
According to the definition of , one gives
Now, we show that the compensated signal is finite-time stable.
Choose the following Lyapunov function candidate:
Invoking (28), (39), and (50), the fractional-order derivative of is
Considering Lemma 7, it can be obtained that in finite time . In view of Assumption 2 and Lemma 8, from (79), we have
where is applied.
Let , and considering Lemma 8 again, we get
Substituting (81) into (80) and applying Lemma 9, one has
where .
Noting Lemma 4, and similar to the proof of , it can be obtained that the compensating signal is finite time stable and satisfies
and the setting time is
where and .
Considering (25), (77), and (83), the tracking error satisfies
Observing (85), it can be seen that the tracking error is the sum of the compensating signal and the compensated tracking error . Accordingly, the convergence time also satisfies this relationship. Moreover, it can be found that the tracking error depends on parameters , , , , , and , . It also implies that the tracking error converge to the specified small neighborhood of origin in finite time within the setting time by selecting the appropriate parameters. This completes the proof.
Remark 3.
Noting (85), the tracking errorcan be made arbitrarily small by adjusting parameters,,,,,and,. We can decreaseby decreasing the values of parametersandor increasingand, and we can decreaseby increasing. We can also increaseby increasing the value of parameter, and we can increaseby increasing. Based on the adjustment of,,, and, it can be guaranteed that the tracking errorcan converge to the specified small neighborhood of origin in finite time within the setting time. However, it should be emphasized that the change ofsimultaneously affectsand, andthe change ofsimultaneously affectsand. Moreover, the adjustment of these parameters may be bringing about an increase in the amplitude of the control signal. Therefore, when selecting suitable parameters, a trade-off should be made between the control performance of the tracking and the amplitude of the control signal.
4. Simulation Analysis
In this section, the simulation cases are given to verify the validity of the control law designed in this paper.
Case 1: Consider a class of uncertain fractional-order systems as follows:
where , , , , , , , , , and . The dead-zone fault model is shown in (2), and , and . The reference signal is ; the initial states are , and ; and the simulation time is .
The RBFNN is used to approximate the unknown nonlinear functions , and . The node number for each RBF neural network is considered to be with the width of basis function being . The centers of the basis function () for the function are evenly spaced in ; for the function , they are evenly spaced in ; and for the function , they are evenly spaced in .
The other design parameters are , , , , , , , , , , , , , , , , , , , , , , , , . The parameters for the second-order command filter are set as and . The initial conditions for adaptive laws are set as , , and .
The simulation results for this case are shown in Figure 1, Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6. Figure 1 and Figure 2 give the curves of the tracking performance and the tracking error . It can be seen from Figure 1 that the system (86) can obtain a good tracking performance in finite time, although the system suffers from the unknown dead-zone fault. From Figure 2, we can see that the tracking error can converge to a small neighborhood of zero in finite time under the proposed control law. The results of these two figures also further verify the validity of the designed control law. Furthermore, the trajectories of the state variables , and are displayed in Figure 3, the curves of the control law and adaptive laws and () are shown in Figure 4, Figure 5 and Figure 6. Noting Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6, the signals of the closed-loop system are bounded in finite time, which shows the validity of the theoretical analysis.
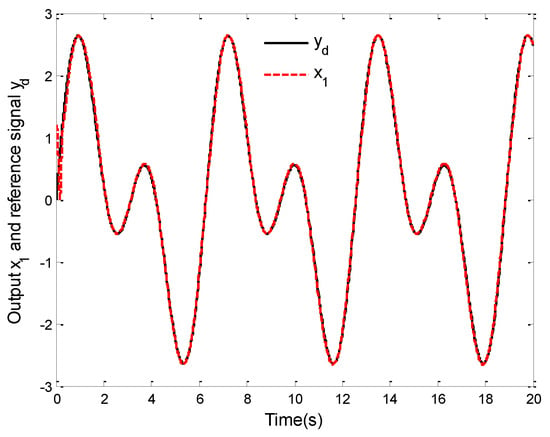
Figure 1.
Curves of tracking performance.
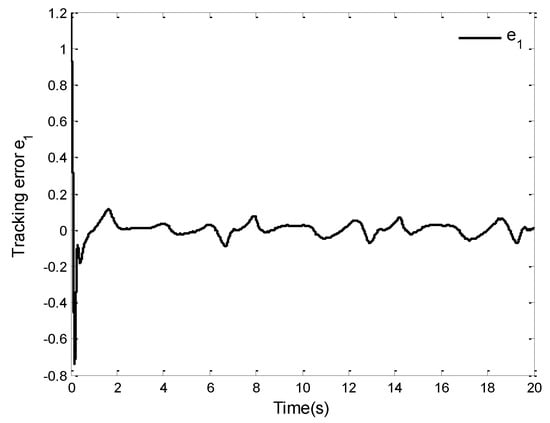
Figure 2.
Tracking error .
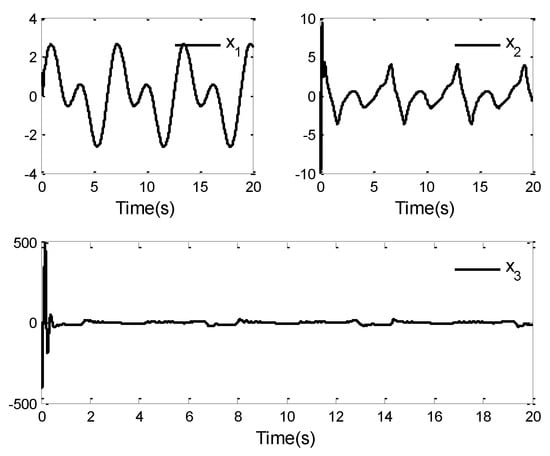
Figure 3.
System states , and .
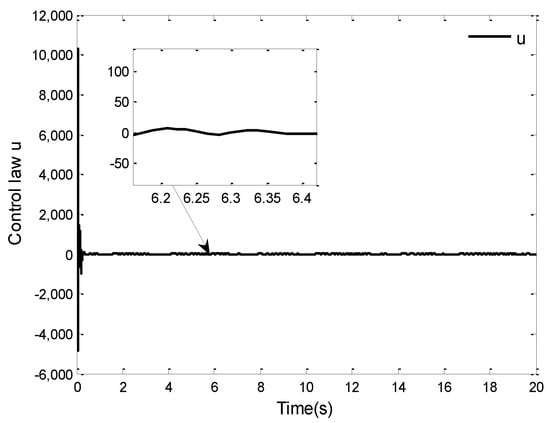
Figure 4.
Control law .
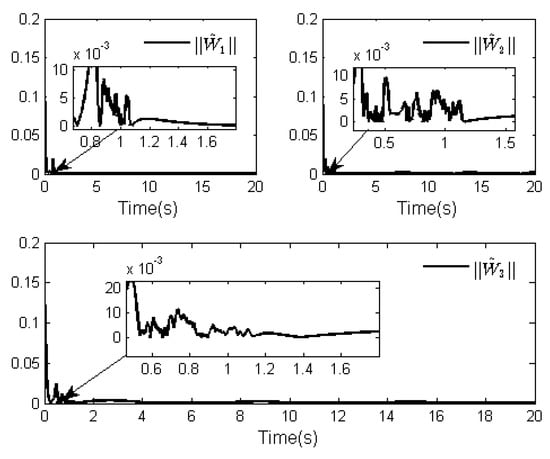
Figure 5.
Norms of adaptive laws .
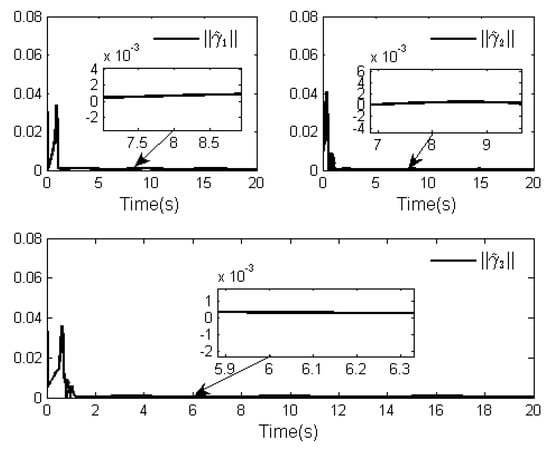
Figure 6.
Norms of adaptive laws .
Case 2: Consider the uncertain fractional-order Arneodo system as []
If , , and , , , , , , the initial conditions are considered to be , , and . The system (87) will appear to have a chaotic phenomenon, as shown in Figure 7.
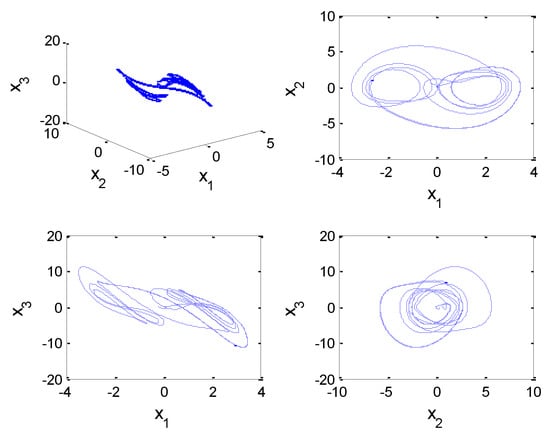
Figure 7.
Phrase plots of , , and .
In system (87), let , , , , , , , and ; the initial states are , and . The parameters of the dead-zone fault model, the reference signal, and the simulation time are consistent with Case 1.
The RBF neural network is applied to approximate the unknown nonlinear functions , and . Since there are only two variables in functions , , and , the node number for each RBF neural network is chosen to be with the centers of the basis function () evenly spaced in and the width being .
The other design parameters are , , , , , , , , , , , , , , , , , , , , , , , , , and . The parameters selection of the second-order command filter and the initial conditions of the adaptive laws are the same as those described for Case 1.
The simulation results of this case are displayed in Figure 8, Figure 9, Figure 10, Figure 11, Figure 12 and Figure 13. Figure 8 shows the curves of the system output and the reference signal . It is not difficult to see from Figure 8 that the system (87) can obtain a good tracking performance by applying the proposed control law. The tracking error curve is given in Figure 9. One observes that the tracking error can converge to a small neighborhood of zero in finite time. From Figure 8 and Figure 9, although the system (87) is affected by unknown dead zone fault, the tracking performance of the system can be guaranteed under the designed control law. This also proves the effectiveness of the proposed control law from another perspective. Furthermore, the curves of state variables , and are given in Figure 10, and the curves of the control law and adaptive laws and () are depicted in Figure 11, Figure 12 and Figure 13. It can be found that the signals of the closed-loop system shown in these figures are bounded, which verifies the validity of the theoretical analysis. However, it is not difficult to observe in Figure 9, Figure 10 and Figure 11 that there are oscillations in these simulation results. In fact, considering the existence of unknown dead-zone faults and uncertain dynamics in the system, this makes it necessary to make a reasonable trade-off between system tracking performance and control output.
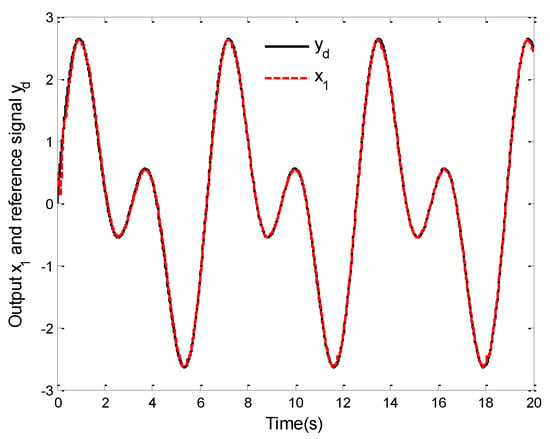
Figure 8.
Curves of the tracking performance.
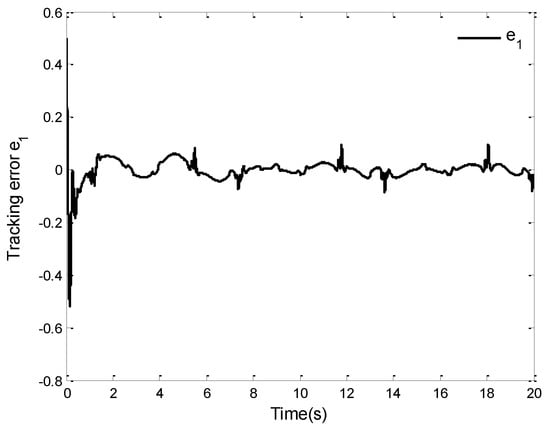
Figure 9.
Tracking error .
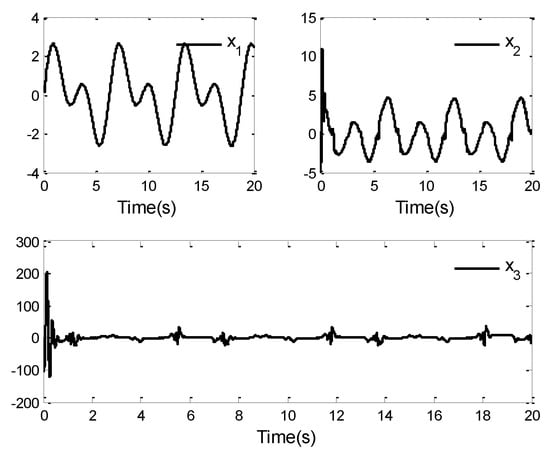
Figure 10.
System states , , and .
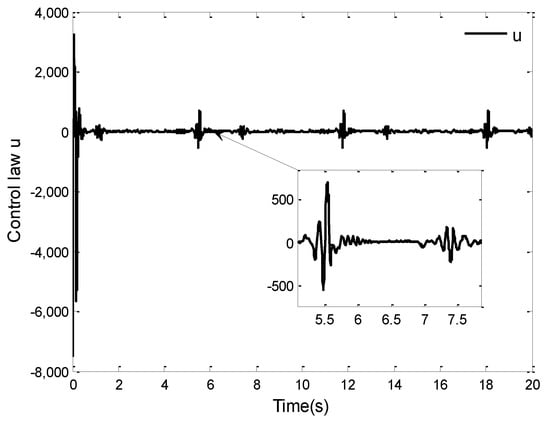
Figure 11.
Control law .
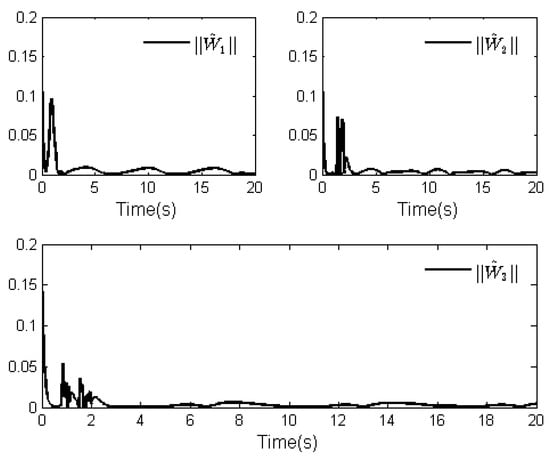
Figure 12.
Norms of adaptive laws .
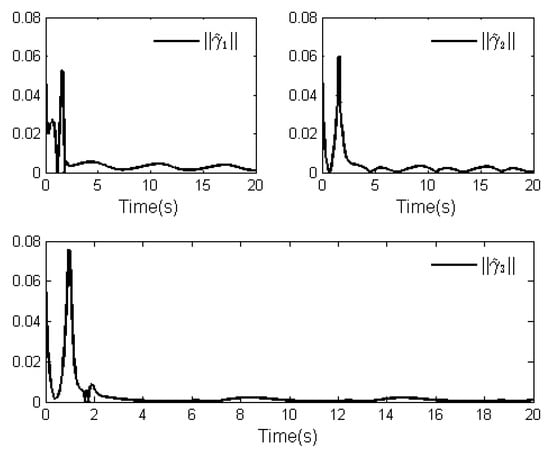
Figure 13.
Norms of adaptive laws .
5. Conclusions
The adaptive finite-time tracking control for uncertain fractional-order systems with unknown dead-zone fault was considered in this paper. The fractional-order command filter was applied to avoid the computational complexity problem existing in conventional recursive procedures, and the neural network approximator was used to approximate the unknown uncertain nonlinear functions. Through the application of the Nussbaum gain function technique, the adaptive neural network finite-time control law was developed to solve the finite-time control problem of the given fractional-order systems. It has been proven that the desinged control law can not only ensure that all signals of the closed-loop system are bounded in finite time but can also ensure that the tracking error converges to a small neighborhood of the origin in finite time. However, it should be pointed out that the control law presented in this paper is only suitable for the systems with known state gains and measurable states. When the nonlinear system under consideration has unknown state gains and unmeasurable states, the proposed control law will not work effectively. Therefore, one of our future research directions is to design feasible control laws to realize the adaptive finite-time control of uncertain fractional-order systems with unknown control gain and partially unmeasurable states.
Author Contributions
Conceptualization, X.D.; Formal analysis, X.D. and L.W.; Funding acquisition, X.D. and L.W.; Investigation, X.D. and L.W.; Methodology, X.D. and L.W.; Project administration, L.W.; Resources, X.D. and L.W.; Software, X.D.; Supervision, L.W.; Validation, X.D.; Visualization, L.W.; Writing–original draft, X.D.; Writing–review & editing, X.D. and L.W. All authors have read and agreed to the published version of the manuscript.
Funding
This work was partially supported by the Natural Science Research of Colleges and Universities of Anhui Province under grant KJ2020A0344 and KJ2020ZD39, and the Program for the Top Talents of Anhui Polytechnic University.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Li, Y.-X.; Yang, G.-H. Observer-based adaptive fuzzy quantized control of uncertain nonlinear systems with unknown control directions. Fuzzy Sets Syst. 2019, 371, 61–77. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, X.; Zhang, S.; Zong, G. Adaptive neural backstepping control design for a class of nonsmooth nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1820–1831. [Google Scholar] [CrossRef]
- Deng, X.; Zhang, C.; Ge, Y. Adaptive neural network dynamic surface control of uncertain strict-feedback nonlinear systems with unknown control direction and unknown actuator fault. J. Frankl. Inst. 2022, 359, 4054–4073. [Google Scholar] [CrossRef]
- Kamalamiri, A.; Shahrokhi, M.; Mohit, M. Adaptive finite-time neural control of non-strict feedback systems subject to output constraint, unknown control direction, and input nonlinearities. Inf. Sci. 2020, 520, 271–291. [Google Scholar] [CrossRef]
- Lai, G.; Liu, Z.; Zhang, Y.; Philip Chen, C.L.; Xie, S. Adaptive inversion-based fuzzy compensation control of uncertain pure-feedback systems with asymmetric actuator backlash. IEEE Trans. Fuzzy Syst. 2017, 25, 141–155. [Google Scholar] [CrossRef]
- Yousefpour, A.; Jahanshahi, H.; Munoz-Pacheco, J.M.; Bekiros, S.; Wei, Z. A fractional-order hyper-chaotic economic system with transient chaos. Chaos Solitons Fractals 2022, 130, 109400. [Google Scholar] [CrossRef]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Vicente, F. Fractional-Order Systems and Controls: Fundamentals and Applications; Springer: Berlin, Germany, 2010. [Google Scholar]
- Demirci, E.; Ozalp, N. A method for solving differential equations of fractional-order. J. Comput. Appl. Math. 2012, 236, 2754–2762. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Mittag-leffler stability of fractional-order nonlinear dynamic systems. Automatica 2009, 45, 1965–1969. [Google Scholar] [CrossRef]
- Li, C.; Deng, W. Remarks on fractional derivates. Appl. Math. Comput. 2007, 187, 777–784. [Google Scholar] [CrossRef]
- Khamsuwan, P.; Kuntanapreeda, S. A linear matrix inequality approach to output feedback control of fractional-order unified chaotic systems with one control input. J. Comput. Nonlinear Dyn. 2016, 11, 051021. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, Y.; Zhang, X.; Li, H. Feedback stabilisation control esign for fractional order non-linear systems in the lower triangular form. IET Control. Theory Appl. 2014, 8, 1238–1246. [Google Scholar]
- Zhan, Y.; Sui, S.; Tong, S. Adaptive Fuzzy decentralized dynamic surface control for fractional-order nonlinear large-scale systems. IEEE Trans. Fuzzy Syst. 2022, 30, 3373–3383. [Google Scholar] [CrossRef]
- Liang, B.; Zheng, S.; Ahn, C.K.; Liu, F. Adaptive fuzzy control for fractional-order interconnected systems with unknown control directions. IEEE Trans. Fuzzy Syst. 2022, 30, 75–87. [Google Scholar] [CrossRef]
- Sui, S.; Chen, C.L.P.; Tong, S. Neural-network-based adaptive DSC design for switched fractional-order nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4703–4712. [Google Scholar] [CrossRef] [PubMed]
- Boulham, I.A.; Boubakir, A.; Labiod, S. Neural network L1 adaptive control for a class of uncertain fractional order nonlinear systems. Integration 2022, 83, 1–11. [Google Scholar] [CrossRef]
- Li, R.; Zhang, X. Adaptive sliding mode observer design for a class of t–s fuzzy descriptor fractional order systems. IEEE Trans. Fuzzy Syst. 2020, 28, 1951–1960. [Google Scholar] [CrossRef]
- Li, X.; Wen, C.; Zou, Y. Adaptive backstepping control for fractional-order nonlinear systems with external disturbance and uncertain parameters using smooth control. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7860–7869. [Google Scholar] [CrossRef]
- Zirkohi, M.M. Robust adaptive backstepping control of uncertain fractional-order nonlinear systems with input time delay. Math. Comput. Simul. 2022, 196, 251–272. [Google Scholar] [CrossRef]
- You, X.; Shi, M.; Guo, B.; Zhu, Y.; Lai, W.; Dian, S.; Liu, K. Event-triggered adaptive fuzzy tracking control for a class of fractional-order uncertain nonlinear systems with external disturbance. Chaos Solitons Fractals 2022, 161, 112393. [Google Scholar] [CrossRef]
- Song, S.; Park, J.H.; Zhang, B.; Song, X. Observer-based adaptive hybrid fuzzy resilient control for fractional-order nonlinear systems with time-varying delays and actuator failures. IEEE Trans. Fuzzy Syst. 2021, 29, 471–485. [Google Scholar] [CrossRef]
- Doostdar, F.; Mojallali, H. An ADRC-based backstepping control design for a class of fractional-order systems. ISA Trans. 2022, 121, 140–146. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Zhang, H. A fuzzy adaptive tracking control for a class of uncertain strick-feedback nonlinear systems with dead-zone input. Neurocomputing 2018, 272, 130–135. [Google Scholar] [CrossRef]
- Wu, L.-B.; Wang, H.; He, X.-Q.; Zhang, D.-Q. Decentralized adaptive fuzzy tracking control for a class of uncertain large-scale systems with actuator nonlinearities. Appl. Math. Comput. 2018, 332, 390–405. [Google Scholar] [CrossRef]
- Zhang, C.-H.; Yang, G.-H. Event-triggered adaptive output feedback control for a class of uncertain nonlinear systems with actuator failures. IEEE Trans. Cybern. 2020, 50, 201–210. [Google Scholar] [CrossRef]
- Yang, W.; Yu, W.; Zheng, W.X. Fault-tolerant adaptive fuzzy tracking control for nonaffine fractional-order full-state-constrained MISO systems with actuator failures. IEEE Trans. Cybern. 2022, 52, 8439–8452. [Google Scholar] [CrossRef]
- Li, Y.-X.; Wang, Q.-Y.; Tong, S. Fuzzy adaptive fault-tolerant control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 1372–1379. [Google Scholar] [CrossRef]
- Wang, C.; Cui, L.; Liang, M.; Li, J.; Wang, Y. Adaptive neural network control for a class of fractional-order nonstrict-feedback nonlinear systems with full-state constraints and input saturation. IEEE Trans. Neural Netw. Learn. Syst. 2021. [Google Scholar] [CrossRef] [PubMed]
- Liu, R.; Wang, Z.; Zhang, X.; Ren, J.; Gui, Q. Robust Control for Variable-Order Fractional Interval Systems Subject to Actuator Saturation. Fractal Fract. 2022, 6, 159. [Google Scholar] [CrossRef]
- Zhan, Y.; Li, X.; Tong, S. Observer-Based Decentralized Control for Non-Strict-Feedback Fractional-Order Nonlinear Large-Scale Systems With Unknown Dead Zones. IEEE Trans. Neural Networks Learn. Syst. 2022. [Google Scholar] [CrossRef]
- Nussbaum, R.D. Some remarks on a conjecture in parameter adaptive control. Syst. Control Lett. 1983, 3, 243–246. [Google Scholar] [CrossRef]
- Oliveira, T.R.; Hsu, L.; Peixoto, A.J. Output-feedback global tracking for unknown control direction plants with application to extremum-seeking control. Automatica 2011, 47, 2029–2038. [Google Scholar] [CrossRef]
- Lv, M.; Yu, W.; Cao, J.; Baldi, S. Consensus in High-Power Multiagent Systems With Mixed Unknown Control Directions via Hybrid Nussbaum-Based Control. IEEE Trans. Cybern. 2022, 52, 5184–5196. [Google Scholar] [CrossRef] [PubMed]
- Lv, M.; De Schutter, B.; Shi, C.; Baldi, S. Logic-based distributed switching control for agents in power-chained form with multiple unknown control directions. Automatica 2022, 137, 110143. [Google Scholar] [CrossRef]
- Cui, Q.; Huang, J.; Gao, T. Adaptive leaderless consensus control of uncertain multi-agent systems with unknown control directions. Int. J. Robust Nonlinear Control. 2020, 30, 6229–6240. [Google Scholar] [CrossRef]
- Wang, K.; Liu, X.; Jing, Y. Adaptive finite-time command filtered controller design for nonlinear systems with output constraints and input nonlinearities. IEEE Trans. Neural Netw. Learn. Syst. 2021. [Google Scholar] [CrossRef]
- Choi, Y.H.; Yoo, S.J. Quantized feedback adaptive command filtered backstepping control for a class of uncertain nonlinear strict-feedback systems. Nonlinear Dyn. 2020, 99, 2907–2918. [Google Scholar] [CrossRef]
- Yu, J.; Shi, P.; Liu, J.; Lin, C. Neuroadaptive Finite-Time Control for Nonlinear MIMO Systems With Input Constraint. IEEE Trans. Cybern. 2022, 52, 6676–6683. [Google Scholar] [CrossRef]
- Song, S.; Zhang, B.; Xia, J.; Zhang, Z. Adaptive Backstepping Hybrid Fuzzy Sliding Mode Control for Uncertain Fractional-Order Nonlinear Systems Based on Finite-Time Scheme. IEEE Trans. Syst. Man, Cybern. Syst. 2020, 50, 1559–1569. [Google Scholar] [CrossRef]
- You, X.; Dian, S.; Liu, K.; Guo, B.; Xiang, G.; Zhu, Y. Command Filter-Based Adaptive Fuzzy Finite-Time Tracking Control for Uncertain Fractional-Order Nonlinear Systems. IEEE Trans. Fuzzy Syst. 2022. [Google Scholar] [CrossRef]
- Li, Y.-X.; Wei, M.; Tong, S. Event-Triggered Adaptive Neural Control for Fractional-Order Nonlinear Systems Based on Finite-Time Scheme. IEEE Trans. Cybern. 2022, 52, 9481–9489. [Google Scholar] [CrossRef]
- Wang, F.; Liu, Z.; Zhang, Y.; Chen, B. Distributed adaptive coordination control for uncertain nonlinear multi-agent systems with dead-zone input. J. Frankl. Inst. 2016, 353, 2270–2289. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Liu, H.; Pan, Y.; Li, S.; Chen, Y. Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2209–2217. [Google Scholar] [CrossRef]
- Gong, P.; Lan, W. Adaptive Robust Tracking Control for Multiple Unknown Fractional-Order Nonlinear Systems. IEEE Trans. Cybern. 2019, 49, 1365–1376. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Zhang, H.; Shi, Z.; Gao, Z. Neural-Network-Based Finite-Time Bipartite Containment Control for Fractional-Order Multi-Agent Systems. IEEE Trans. Neural Netw. Learn. Syst. 2022. [Google Scholar] [CrossRef] [PubMed]
- Zhao, N.-N.; Ouyang, X.-Y.; Wu, L.-B.; Shi, F.-R. Event-triggered adaptive prescribed performance control of uncertain nonlinear systems with unknown control directions. ISA Trans. 2021, 108, 121–130. [Google Scholar] [CrossRef] [PubMed]
- Alassafi, M.O.; Ha, S.; Alsaadi, F.E.; Ahmad, A.M.; Cao, J. Fuzzy synchronization of fractional-order chaotic systems using finite-time command filter. Inf. Sci. 2021, 579, 325–346. [Google Scholar] [CrossRef]
- Ha, S.; Chen, L.; Liu, H.; Zhang, S. Command filtered adaptive fuzzy control of fractional-order nonlinear systems. Eur. J. Control 2022, 63, 48–60. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).