Abstract
This paper mainly studies fault-tolerant control for a class of semi-linear fractional-order multi-agent systems with diffusion characteristics, where the actuator fault is considered. The adaptive fault-tolerant control protocol based on the adjacency relationship of agents is firstly designed, which can adjust the coupling gain online through the adaptive mechanism. Using the Lyapunov stability theory, the adaptive fault-tolerant control protocol can drive the agents to achieve consensus for leader-following and leaderless cases. Finally, the simulation experiment is carried out, showing the effectiveness of the proposed theory.
1. Introduction
In recent years, multi-agent systems (MASs) have attracted more and more scholars’ attention. MASs have been extensively applied in many fields, such as spacecraft formation, multi-robot cooperative control, and ship course-keeping [1,2,3,4]. With the rapid development of industry, many large and complex systems have been designed. These systems have a strong working ability and have a profound impact on human production and life and even the development of society. However, MASs in long-term operation have the possibility of failure, such as actuator failure, sensor failure, because of the impact of the environment on multi-agents [5,6,7]. Once the failure is not found in time and not properly handled, it is very likely for an accident to occur, causing economic losses and even casualties. Therefore, the fault-tolerant control method of MASs has a good value to research.
At present, adaptive technology has been widely used for the fault-tolerant control of MASs [8]. This is because the development of adaptive control is more in line with practical applications, and adaptive control can automatically compensate for unpredictable changes in various parameters and input signals, which can better overcome system disturbances and improve the robustness of MASs.
Adaptive fault-tolerant control of MASs has made progress in recent years. In 2014, Yin et al. proposed an integrated design of fault-tolerant control systems through adaptive residual generators by iterative optimization methods [9]. In 2018, Khalili et al. studied a class of uncertain nonlinear MASs and designed a local fault-tolerant control scheme [10]. In 2019, Deng and Yang designed a distributed finite-time observer and an adaptive fault-tolerant controller for output regulation of MASs with actuator faults [11]. In 2020, Liu et al. studied the formation tracking of MASs with bias faults and unknown effectiveness losses through adaptive fault-tolerant strategies [12]. In 2020, Li and Wang proposed a fault-tolerant tracking consensus protocol for MASs with actuator faults [13]. In 2021, Dongn et al. studied the problem of cooperative output regulation of mismatched or mismatched nonlinear uncertain MASs [14]. In 2021, Yadegar and Meskin studied an adaptive fault-tolerant control for nonlinear heterogeneous MASs with time-varying additive actuator faults [15].
Actually, all processes essentially depend on both time and space [16,17]. There are many dynamic behaviors with spatio-temporal characteristics in nature, such as transport reaction processes [18], continuous casting [19], sputtering processes [20], hydraulic fracturing [21] and cracking furnaces [22]. As a result, it has a great practical significance to study MASs with spatio-temporal characteristics. In such systems, when considering the behavioral state of the system, one needs to consider the impact of changes in time and space on the state. To better express the spatio-temporal characteristics, the system model is usually created by partial differential equations (PDEs). In 2022, Dai et al. studied the consensus of semilinear parabolic MASs with time delay based on partial integral-differential equations [23]. In 2018, Yang et al. studied the boundary control of distributed measurement for MASs based on PDEs [24]. In 2020, Yang and Li et al. studied boundary control for exponential synchronization of reaction-diffusion neural networks based on coupled PDEs [25]. The research achievements of systems with spatio-temporal characteristics have been relatively abundant, but the research achievements of fault-tolerant control of MASs with spatio-temporal characteristics are still very few. Considering the practical value of fault-tolerant control of MASs with spatio-temporal characteristics, this paper carries out the research.
More recently, fractional-order calculus attracted increasing attention because of its hereditary and memory properties. Fractional-order MASs could portray dynamic behaviors more clearly [26,27,28,29,30]. Actually, many practical systems are better identified as fractional-order calculus than integer order, such as biomedical signal processing [31], motion control [32], image edge detection [33], and temperature control [34]. As a result, it has important significance for the research consensus of PDE-based fractional-order MASs (PDEFOMASs). Yan et al. proposed boundary consensus control for PDEFOMASs under collocated and distributed boundary measurement form [35], which is further applied in image encryption [36]. Wang et al. studied observer-based consensus PDEFOMASs via boundary communication [37]. However, the fault-tolerant control of PDEFOMASs is still a challenge, which has not been solved yet.
This paper focuses on the problem of the fault-tolerant consensus adaptive control of semi-linear PDEFOMASs accompanied by actuator faults, which is modeled by semi-linear parabolic PDEs. An adaptive fault-tolerant control method is constructed based on the information interaction among adjacent agents, which is used in leaderless PDEFOMASs and leader-following PDEFOMASs, respectively. The organization of the main content is as follows: Firstly, the actuator fault models and the system dynamics model are given. The second part defines the error system and applies the optimized adaptive fault-tolerant control protocol to leaderless PDEFOMASs, to reach the asymptotic convergence of the errors using Lyapunov’s generalized function. The third part applies the optimized fault-tolerant control protocol to leader-following PDEFOMASs and proves the asymptotic convergence of the errors by using Lyapunov’s function. Finally, numerical simulation experiments of the two theorems are conducted to verify the effectiveness of the proposed fault-tolerant control protocol.
Notations: denotes the identity matrix with nth order. denotes the maximum (minimum) eigenvalue. denotes the minimum non-zero eigenvalue. is the Euclidean norm.
2. Problem Formulation
2.1. System Dynamics Model
A class of semi-linear PDEFOMASs with considering spatio-temporal characteristics and actuator faults is studied as
where represents the state of the i-th agent, mean the space variable and time variable, respectively. is a positive scalar. is a Caputo fractional-order derivative. . is a nonlinear function. is symmetric positive definite. and are known matrices. and N is the number of agents in the PDEFOMASs.
Definition 1
([38]). Caputo fractional-order derivative with t of is defined as
where .
2.2. Actuator Fault Model
Fault-tolerant control of PDEFOMASs with actuator faults are considered in this study. One actuator fault model is proposed for the MASs with two communication typologies, one the leaderless case and the other the leader-following case, as follows:
where represents an unknown actuator fault impact factor and represents the control input.
Definition 2.
For the leaderless PDEFOMAS Equation (1) with any initial conditions, it is said to reach consensus, if it satisfies
Assumption 1.
Assuming that the impact factor of the actuator in Equation (3) is bounded, namely, in which and .
Assumption 2.
Suppose for any scalars and , there exists a scalar such that
Lemma 1
([39]). For a differential function , one has
3. Consensus of Leaderless the PDEFOMAS through Adaptive Fault-Tolerant Control Protocol
The dynamics model of the i-th agent with actuator fault Equation (3) in the leaderless PDEFOMAS Equation (1) is represented as
Define the consensus error of leaderless PDEFOMAS as and the adaptive fault-tolerant control protocol is designed as
where is the control gain and is a known positive real number. The graph is undirected, which is defined as when the agent i is connected with the agent j; otherwise, .
Combined with the control protocol Equation (8), the derivative of the error system can be obtained
where , and . Here, and when . So, is a Laplacian matrix.
Theorem 1.
Proof.
Construct the Lyapunov function as
where is a positive real number that can be determined later.
Taking the derivative of yields
By the integration by parts, we obtain
Using the triangle inequality [40], for any , one has
According to the property of the triangle inequality, we obtain
Since is the Laplace matrix and , one has
Using the property of the Laplace matrix, we obtain
4. Consensus of the Leader-Following PDEFOMAS through Adaptive Fault-Tolerant Control Protocols
The dynamics for the i-th follower with actuator fault (2) of the PDEFOMAS is represented in the following form:
The dynamics model of the leader in the leader-following PDEFOMAS is represented in the following form:
Define the error system of the leader-following PDEFOMAS as and the adaptive fault-tolerant control protocol is expressed in the following form:
if can obtain information from , then ; otherwise, .
Combined with the control protocol Equation (21), the derivative of the error system can be obtained as
where , and is a positive definite symmetric matrix.
Theorem 2.
Proof.
Constructing the Lyapunov function is
where is a positive real number that can be determined later.
Taking the derivative of and substituting Equation (22) into this derivative yields the following:
Using integration by parts, one has
Using the triangle inequality [40], for any , one has
Using Assumption 1, we obtain
Because H is a positive definite matrix, one has
Using Assumption 1, we obtain
It is easy to see from Equation (31) that for , where , is obtained, indicating that the system reaches consensus. □
Remark 1.
Many works on adaptive fault-tolerant control for fractional-order multi-agent systems have obtained important results [26,27,28,29,30] but without considering the spatiotemporal behaviors, and this problem is addressed in this paper.
Remark 2.
More recently, there have only been a few important works devoted to researching fractional-order multi-agent systems based on PDEs [35,36,37,41]. This paper firstly addresses the fractional-order multi-agent systems based on PDEs with faults.
Remark 3.
This paper addresses adaptive fault-tolerant control for fractional-order multi-agent systems based on PDEs, not only for the leaderless case but also for the leader-following case.
5. Numerical Simulation
Example 1.
To show the effectiveness of Theorem 1, consider a semi-linear PDEFOMAS Equation (3) composed of 4 nodes with random initial conditions and coefficients listed as
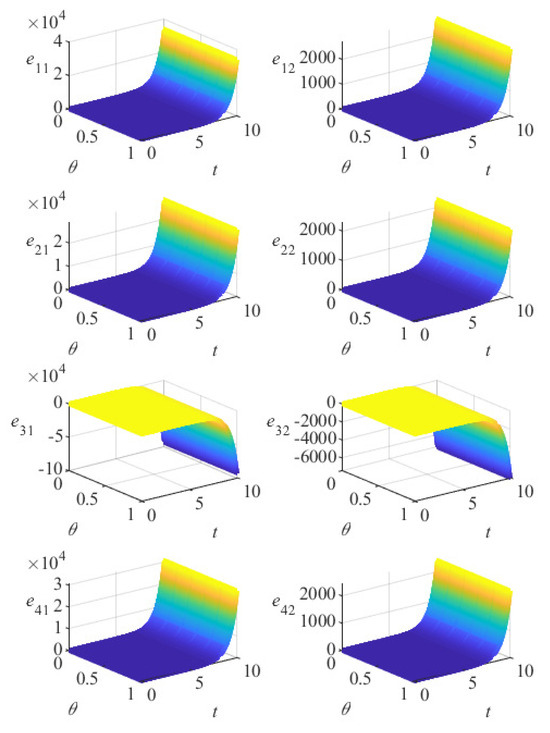
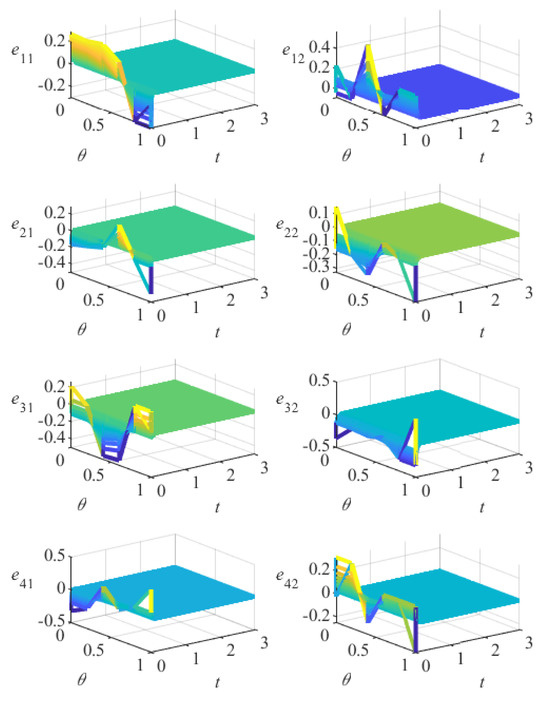
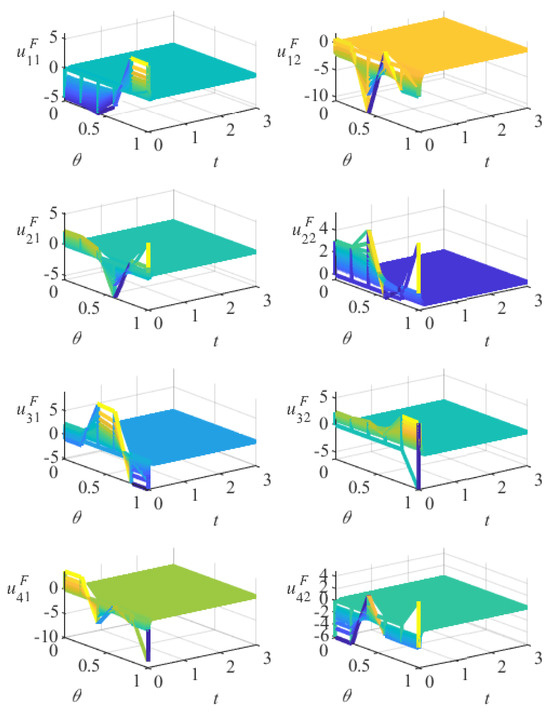
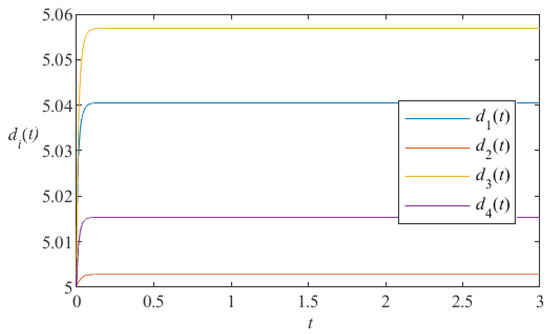
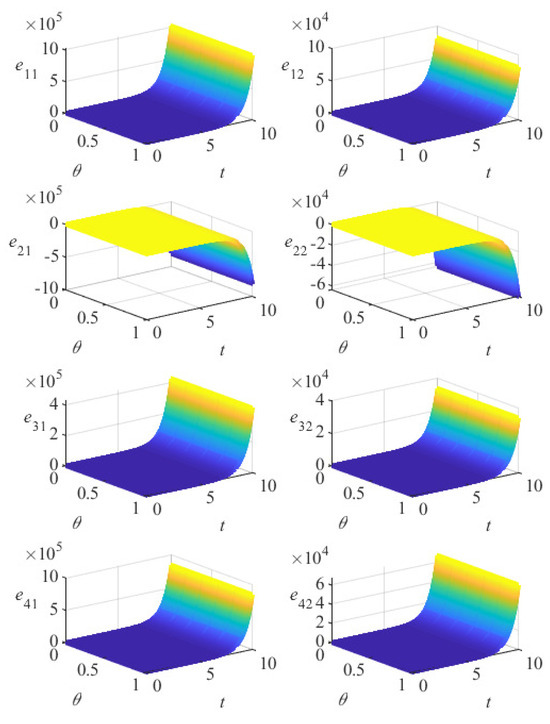
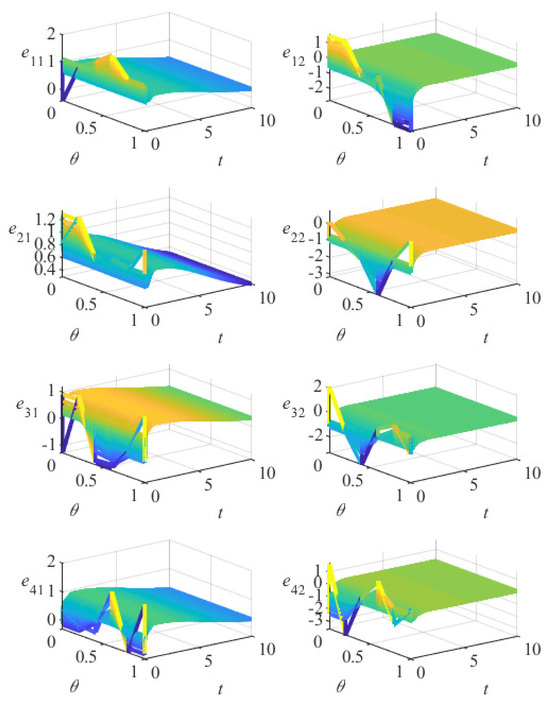
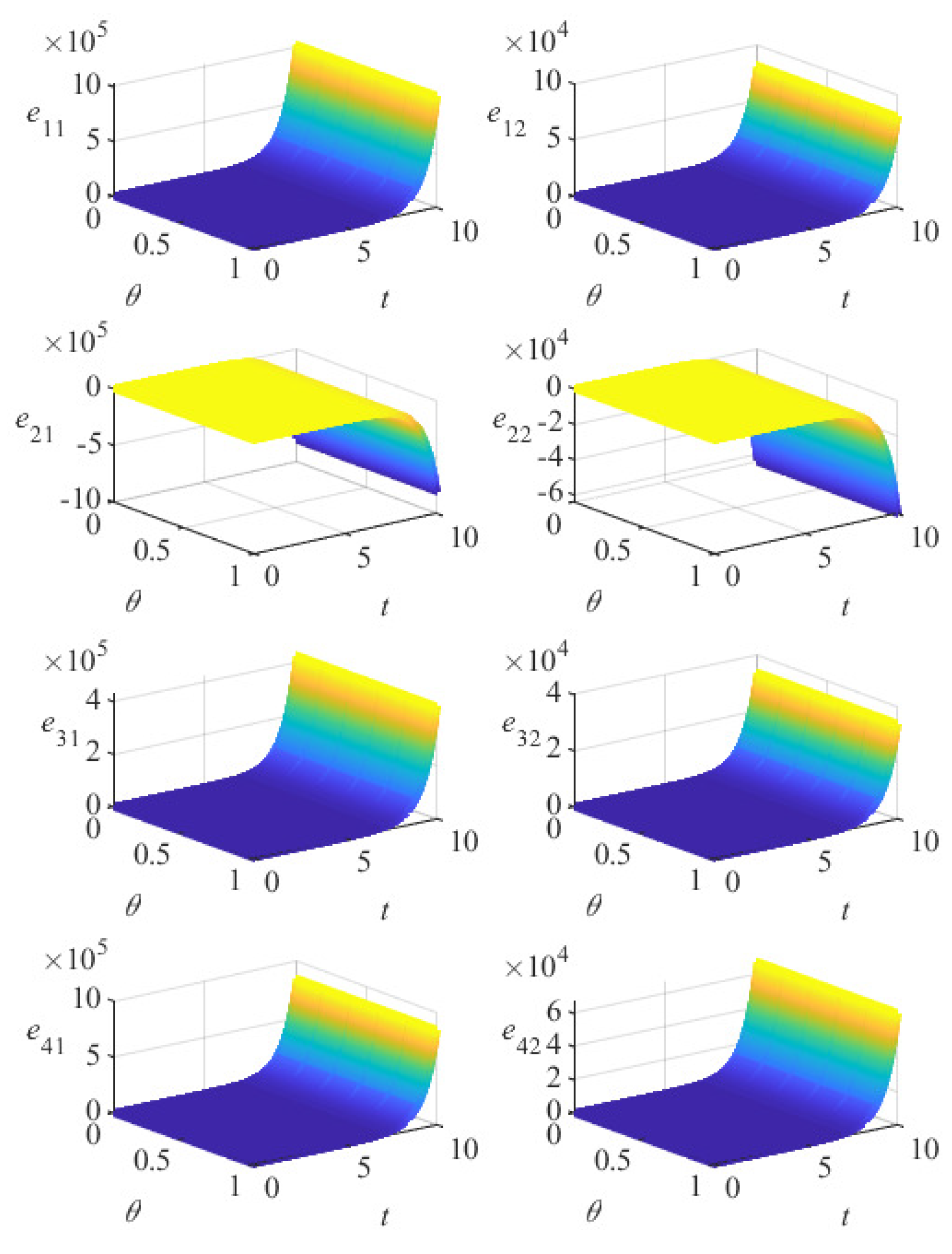
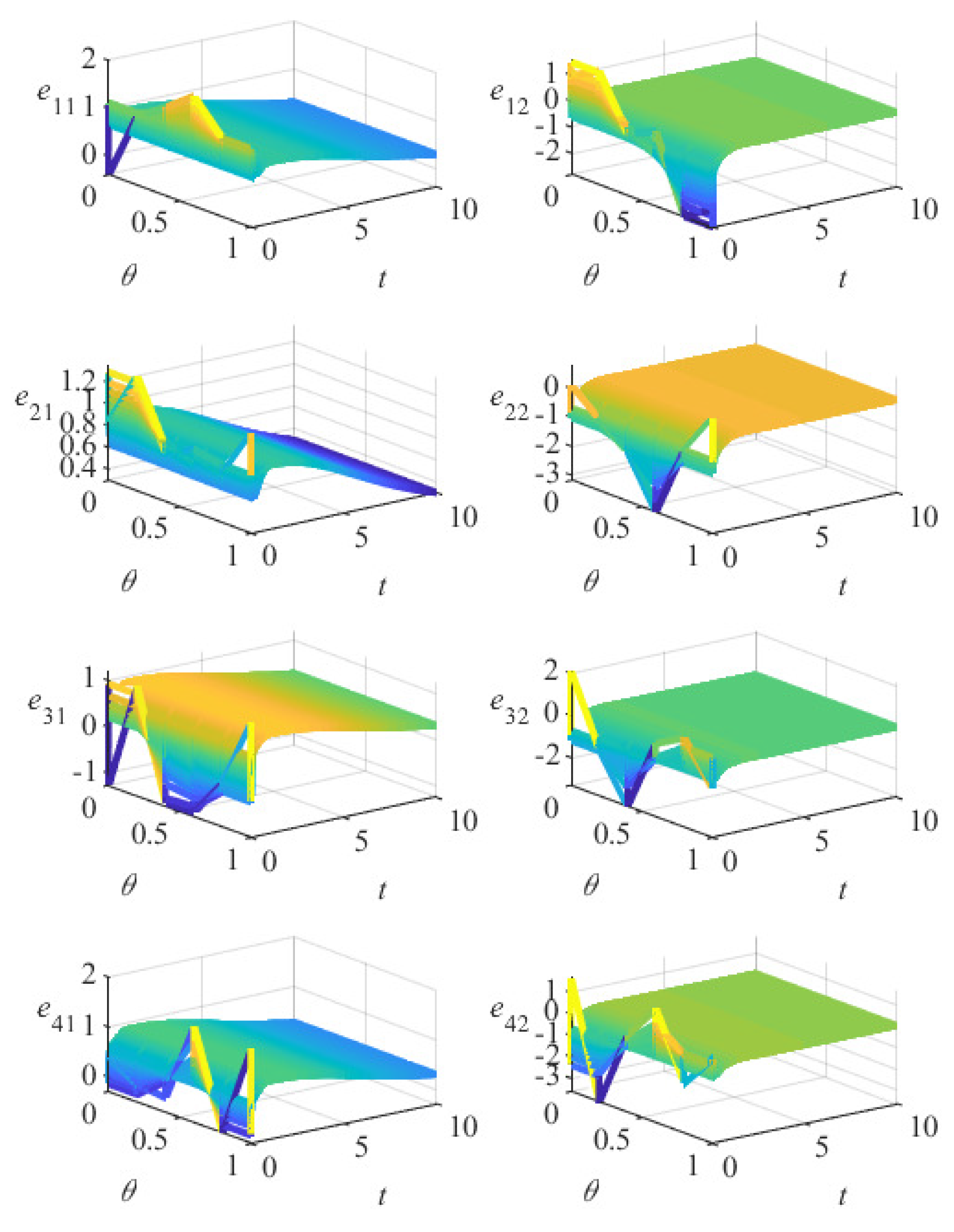
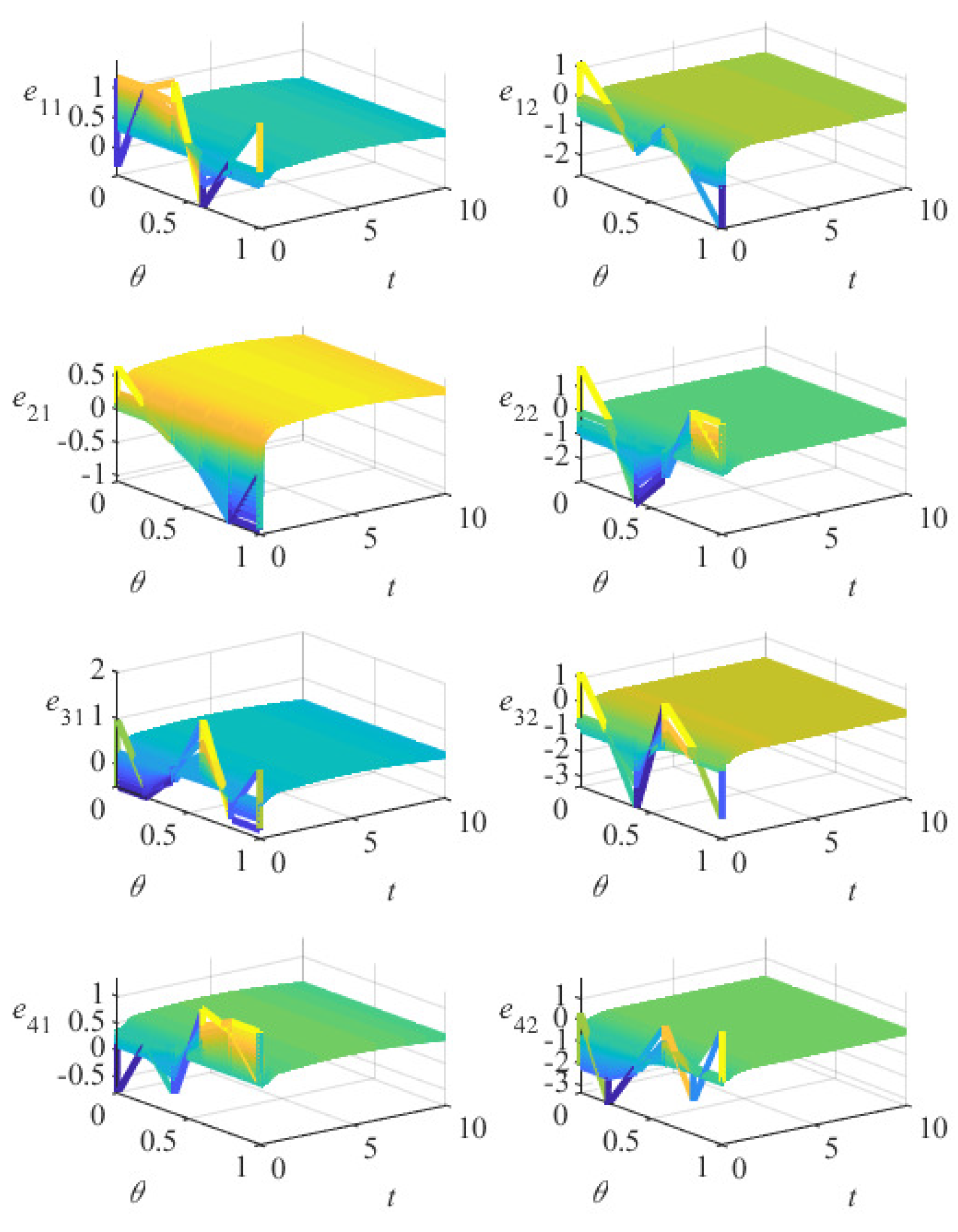
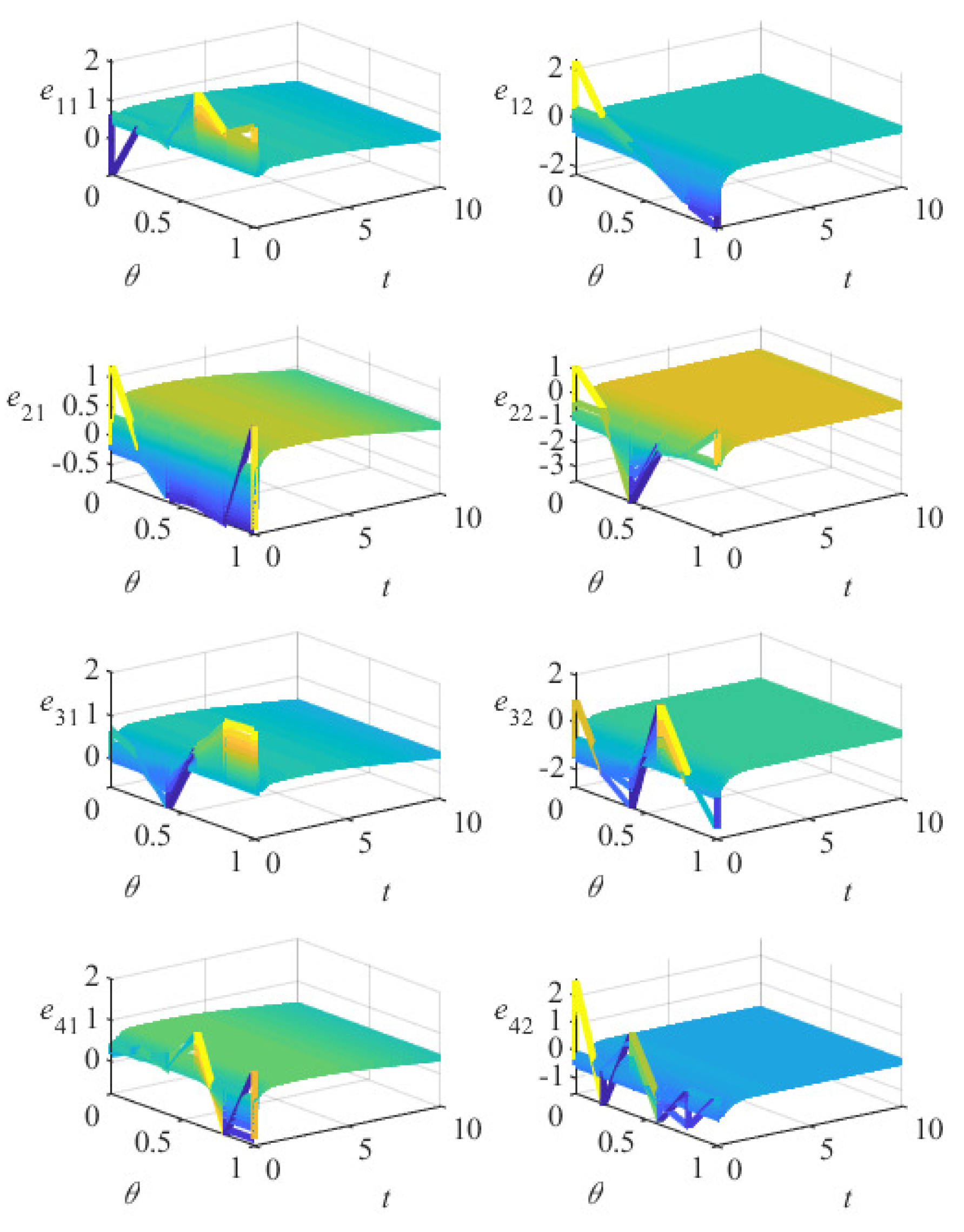
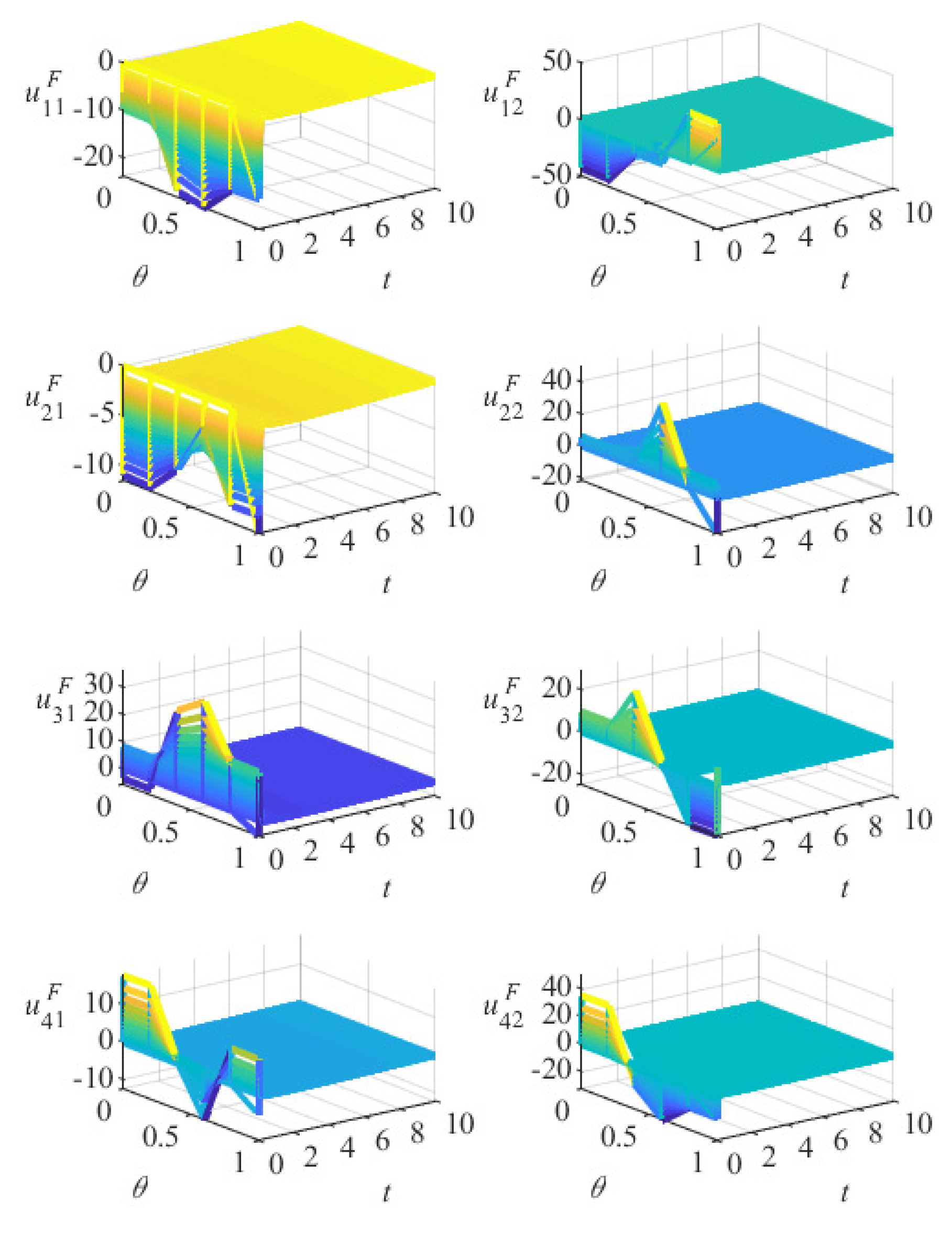
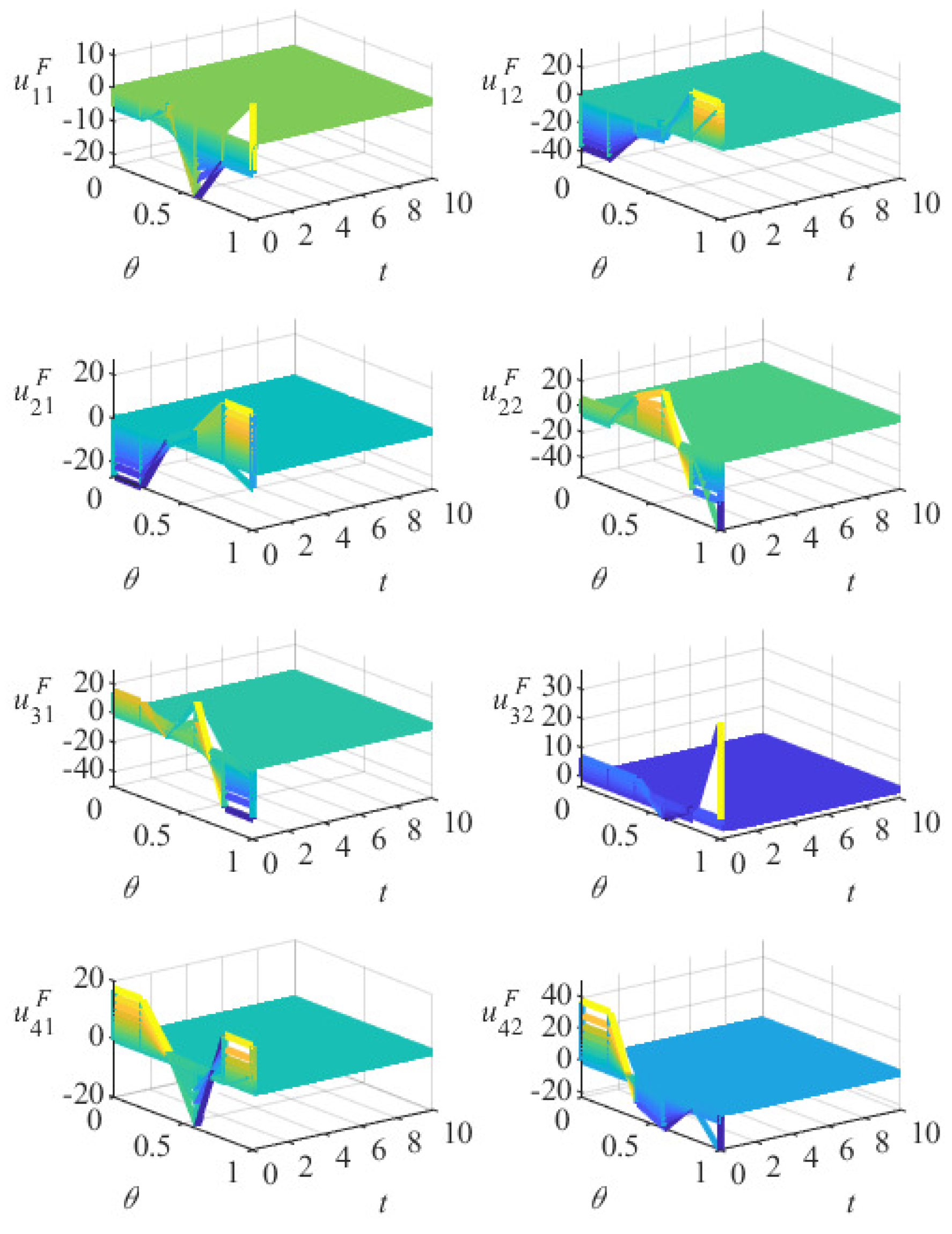
Through numerical simulation, Figure 1 shows the error system without an adaptive fault-tolerant controller. It can be found that diverges and cannot approach zero, that is to say, the target system does not reach consensus. Figure 2 shows the simulation results obtained after the use of a fault-tolerant controller. Obviously, consensus errors tend to zero quickly, and the system finally reaches consensus. Figure 3 shows the control input of leader-follower PDEFOMASs with an actuator fault. Figure 4 shows the adaptive control gain of leader-following PDEFOMASs.
Figure 1.
of the leaderless PDEFOMASs without adaptive control.
Figure 2.
of the leaderless PDEFOMASs with adaptive control.
Figure 3.
The control input with fault of the leaderless PDEFOMASs.
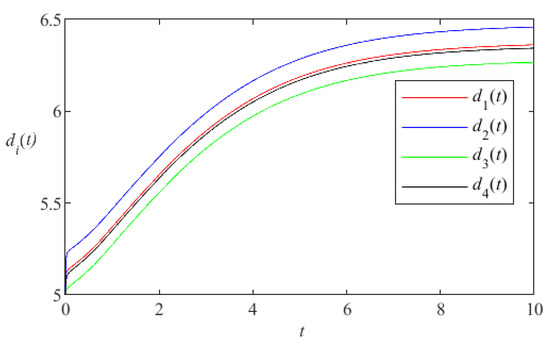
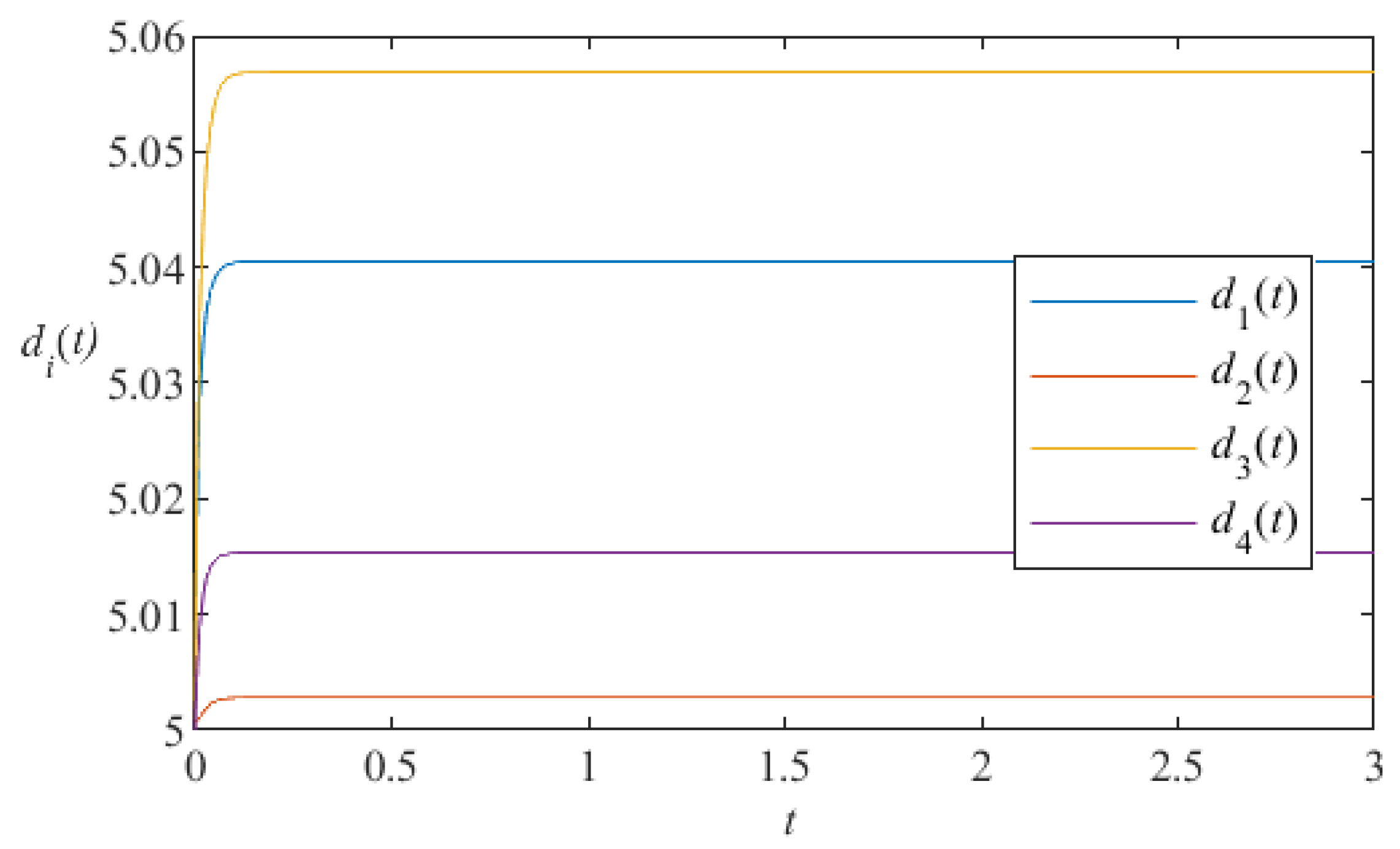
Figure 4.
The adaptive control gain of the leaderless PDEFOMASs.
Example 2.
In order to prove the validity of Theorem 2, consider the leader-following nonlinear PDEFOMASs Equation (18) composed of four followers and one leader, setting , random initial conditions, and the other coefficients are the same as those in Example 1.
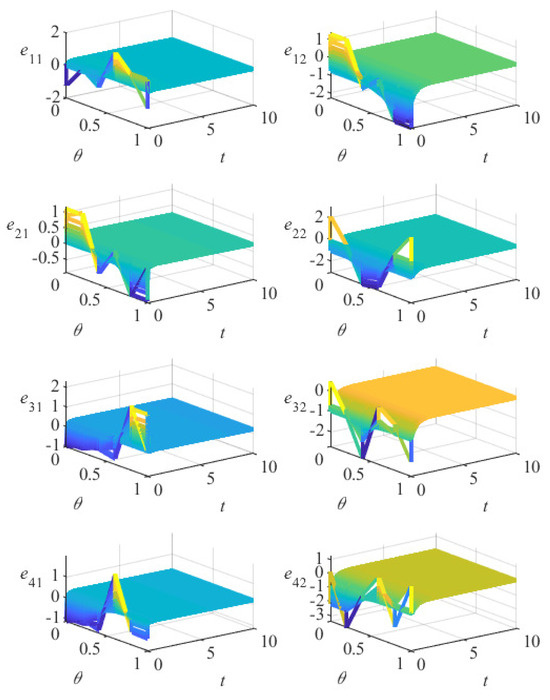
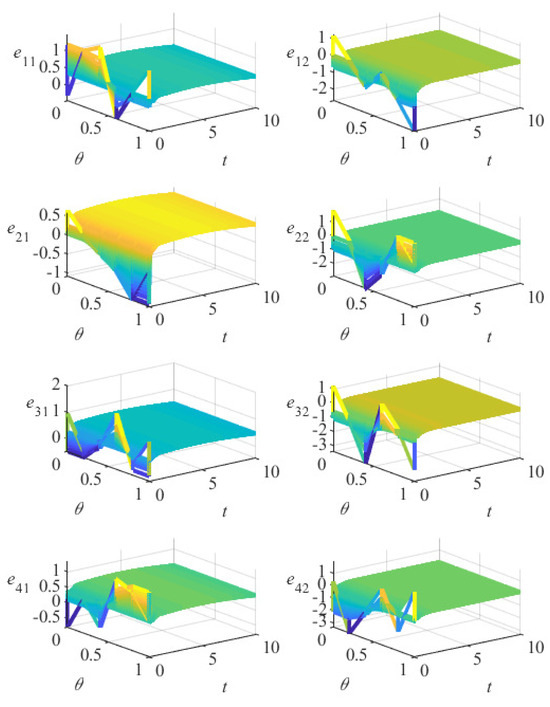
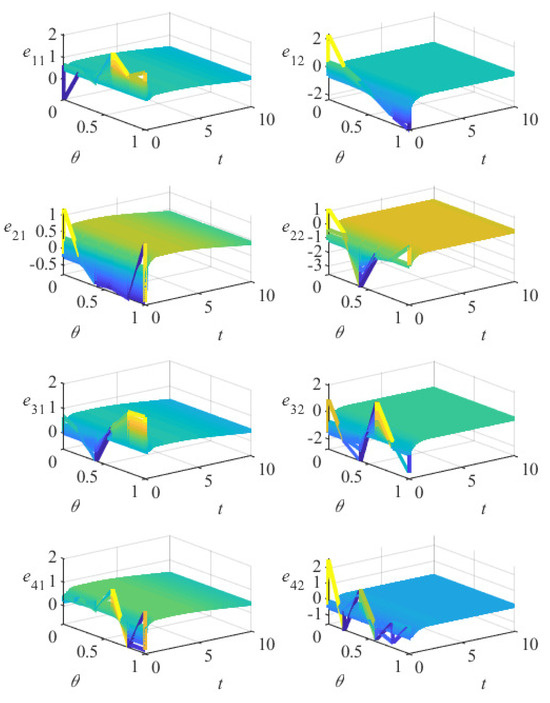
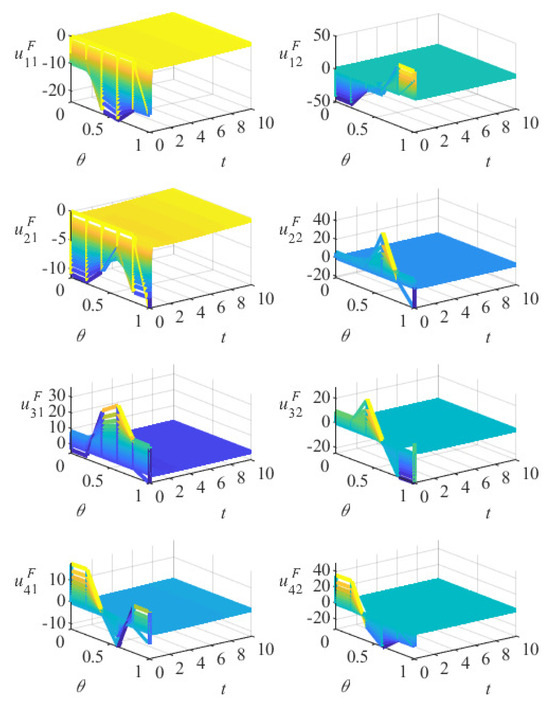
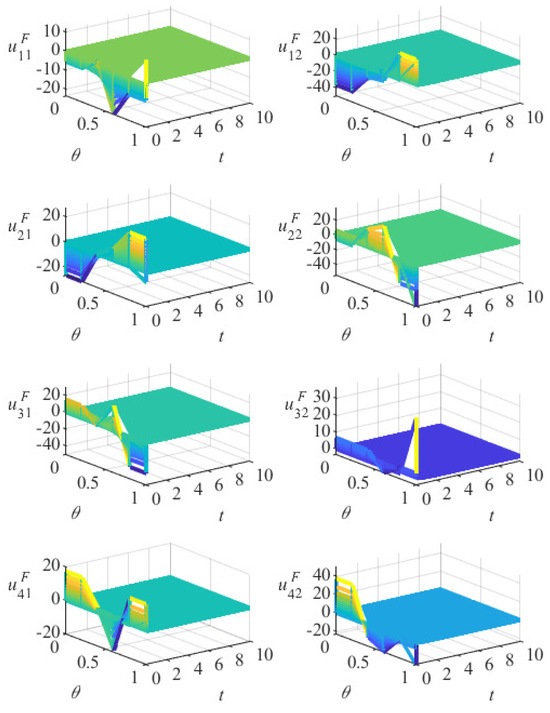
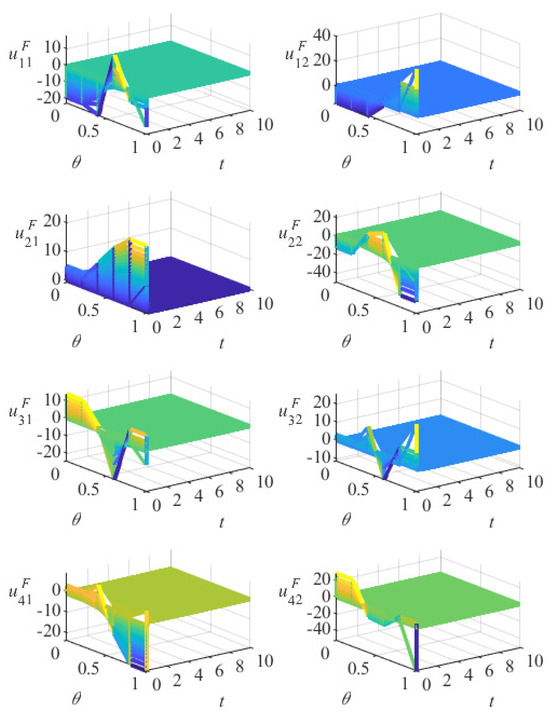
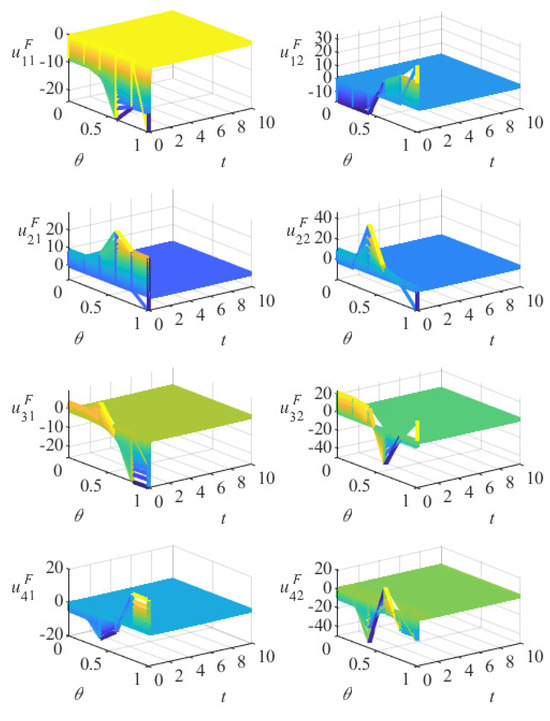
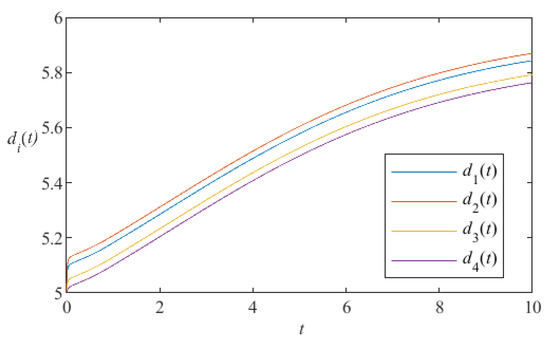
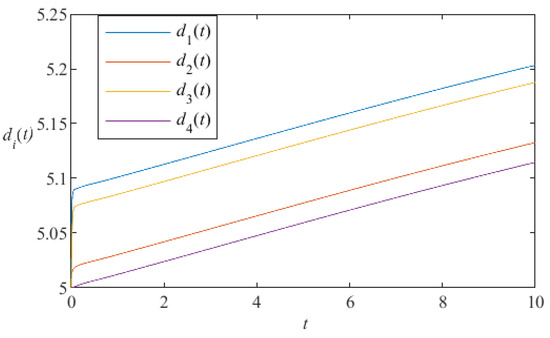
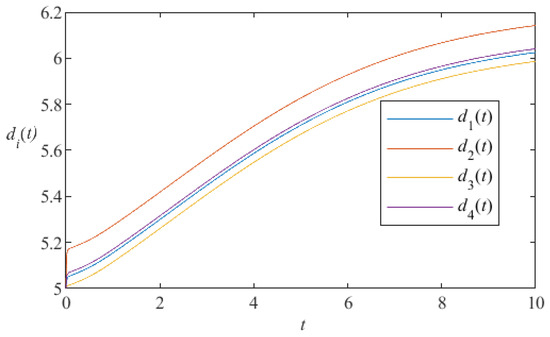
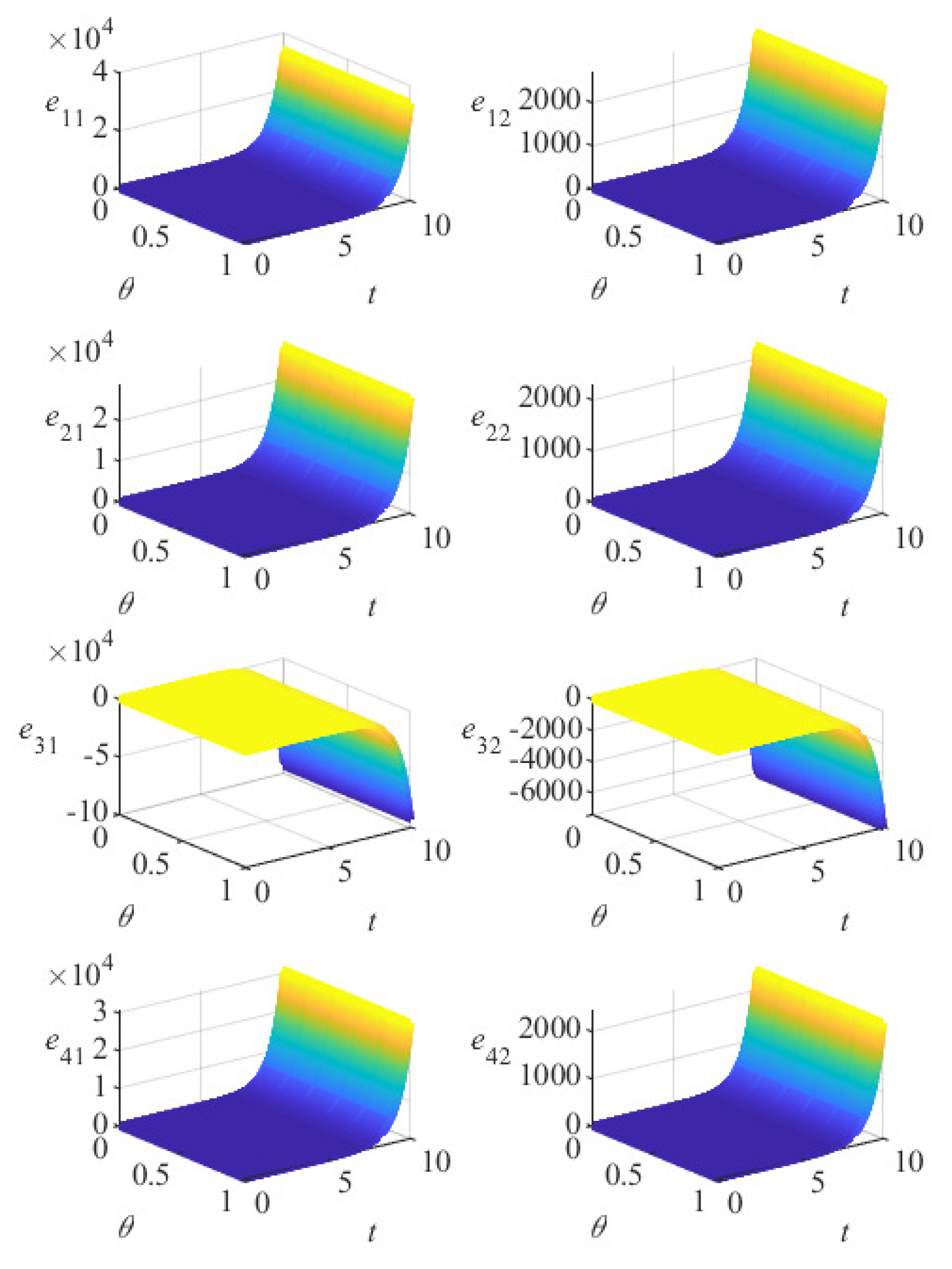
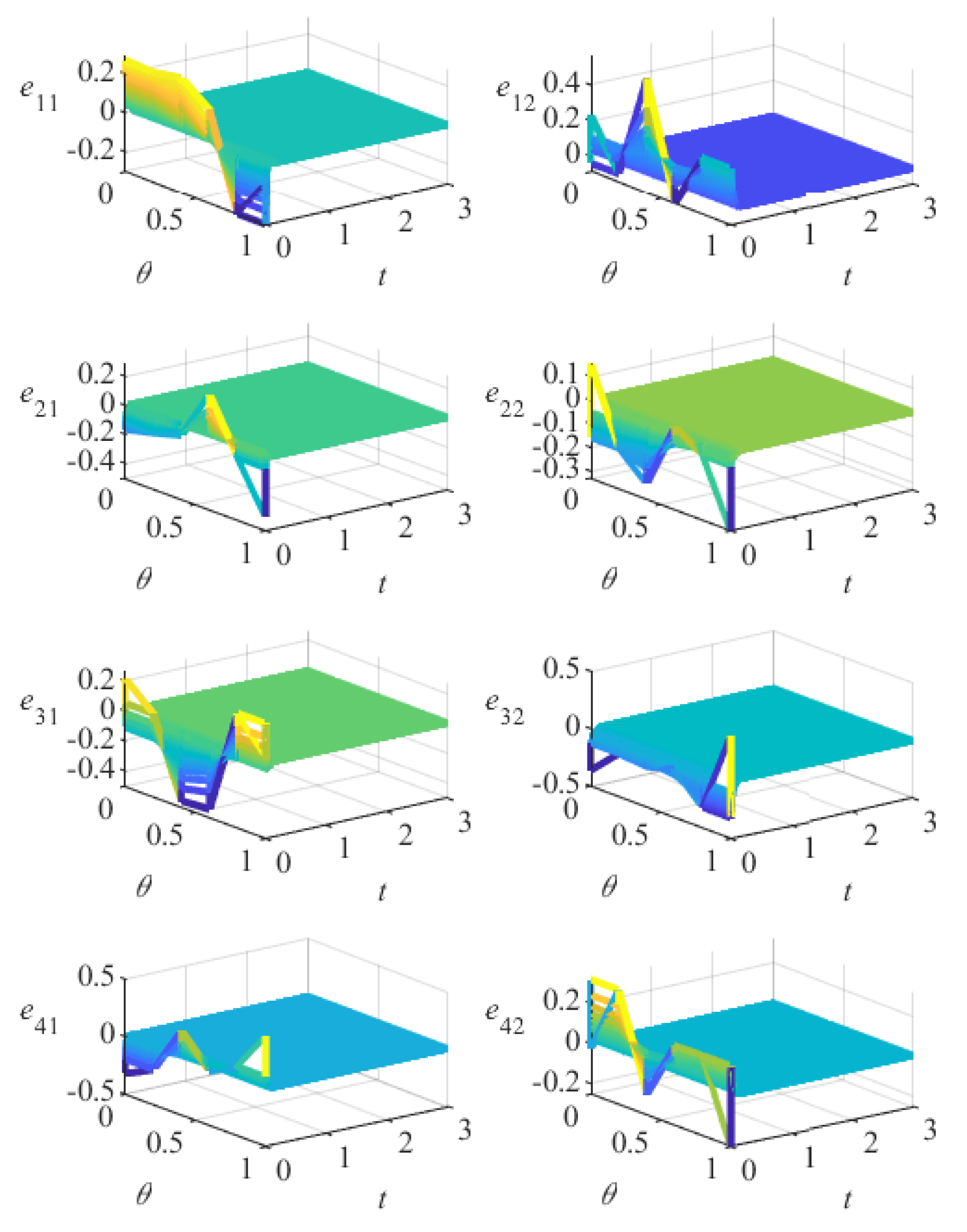
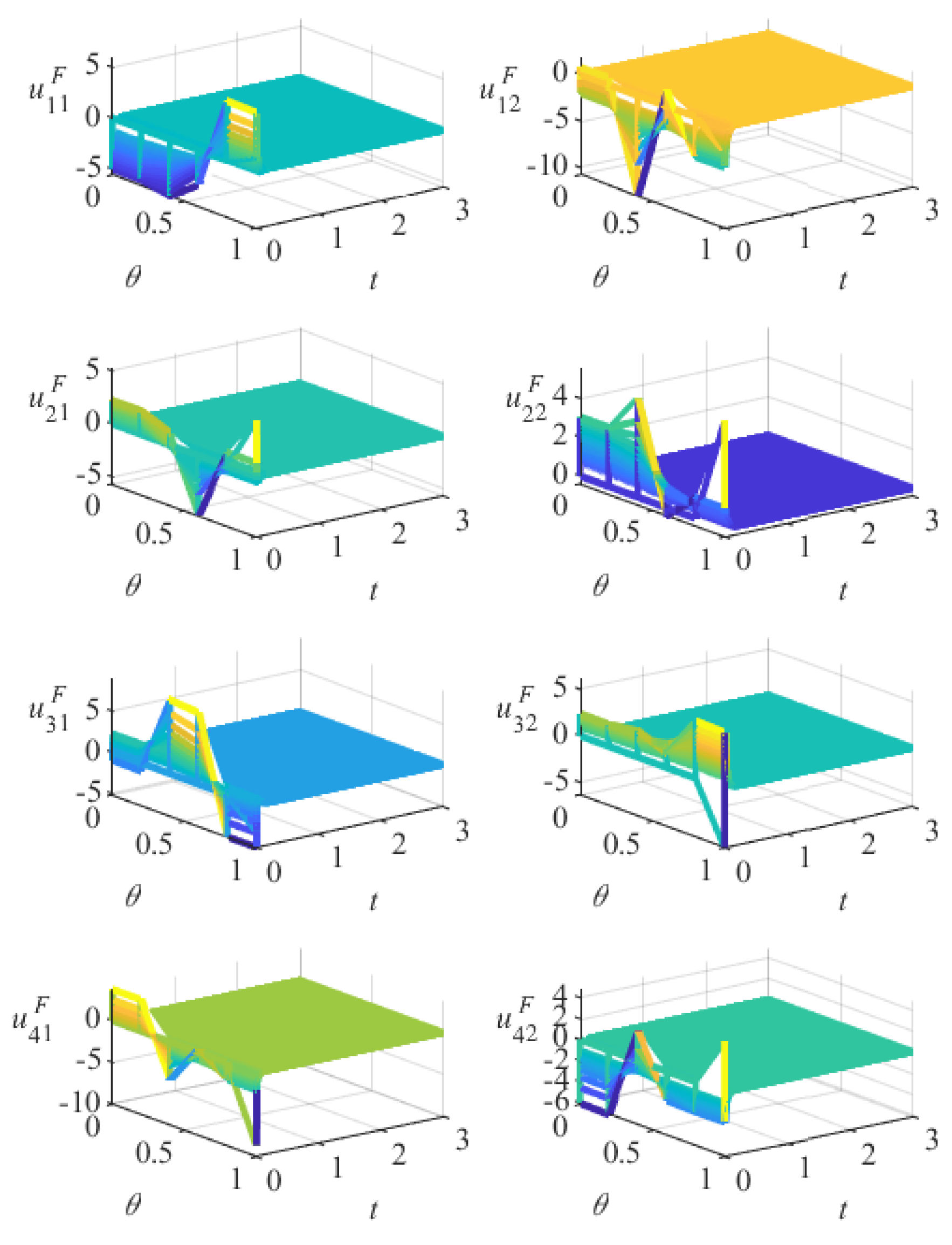
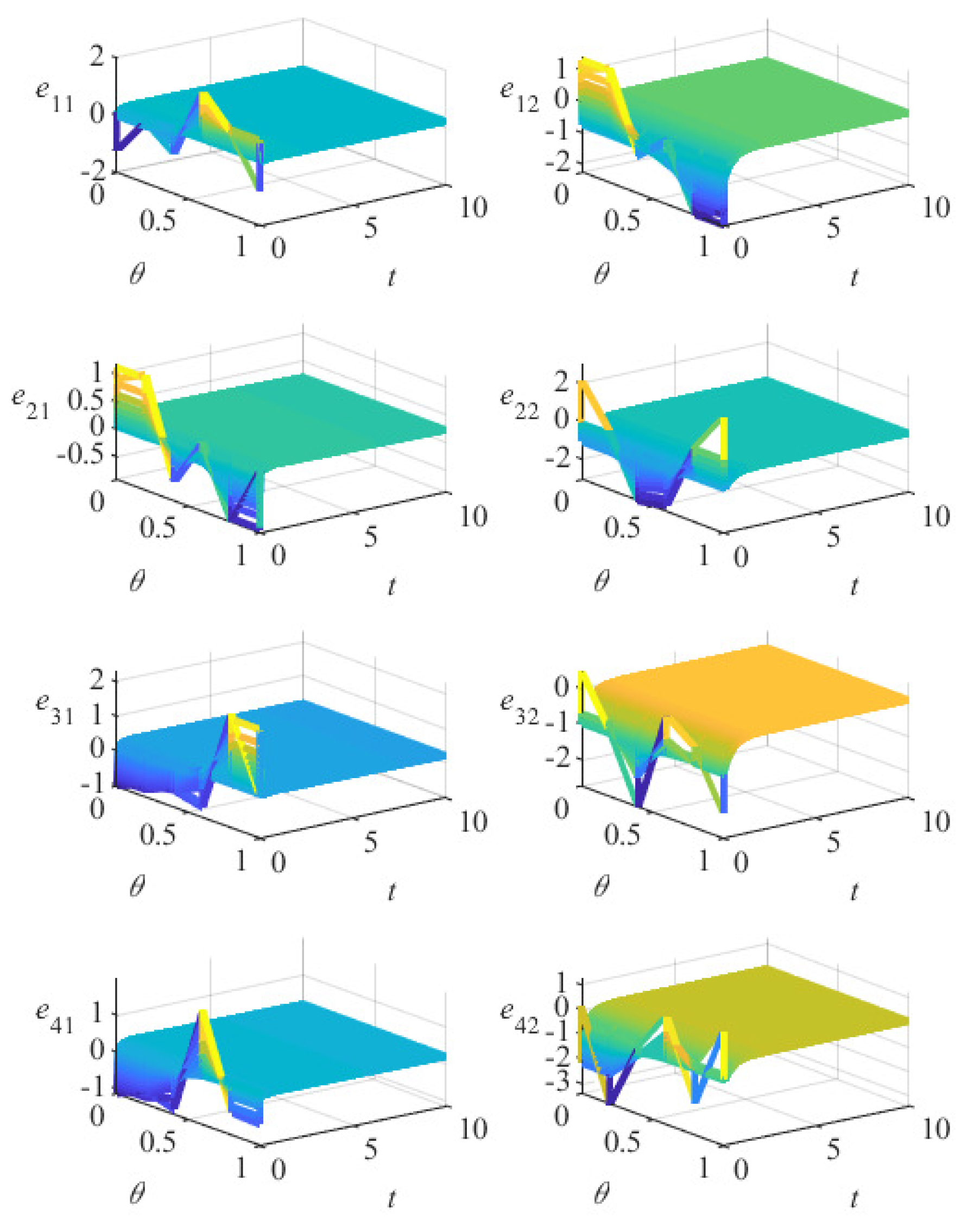
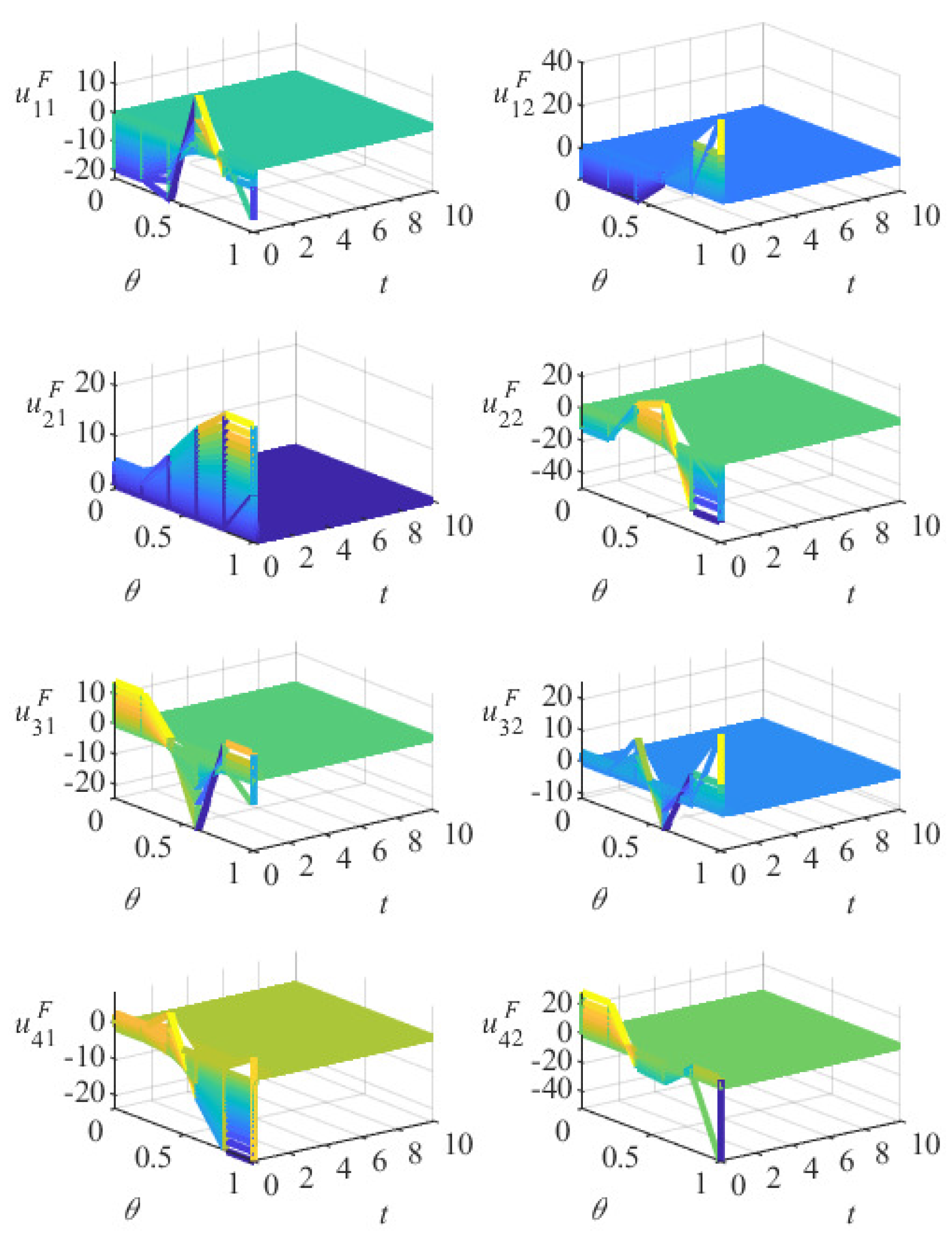
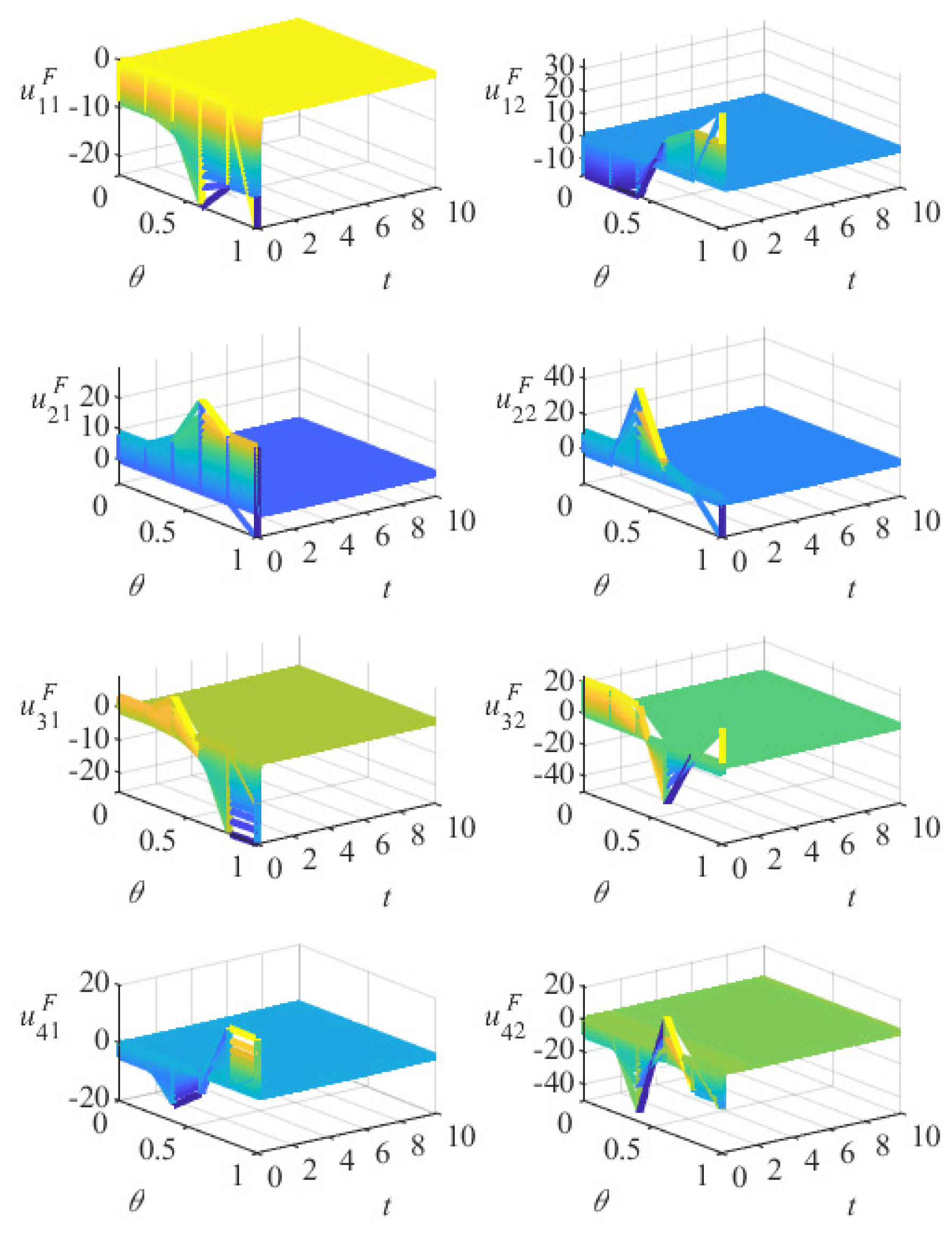
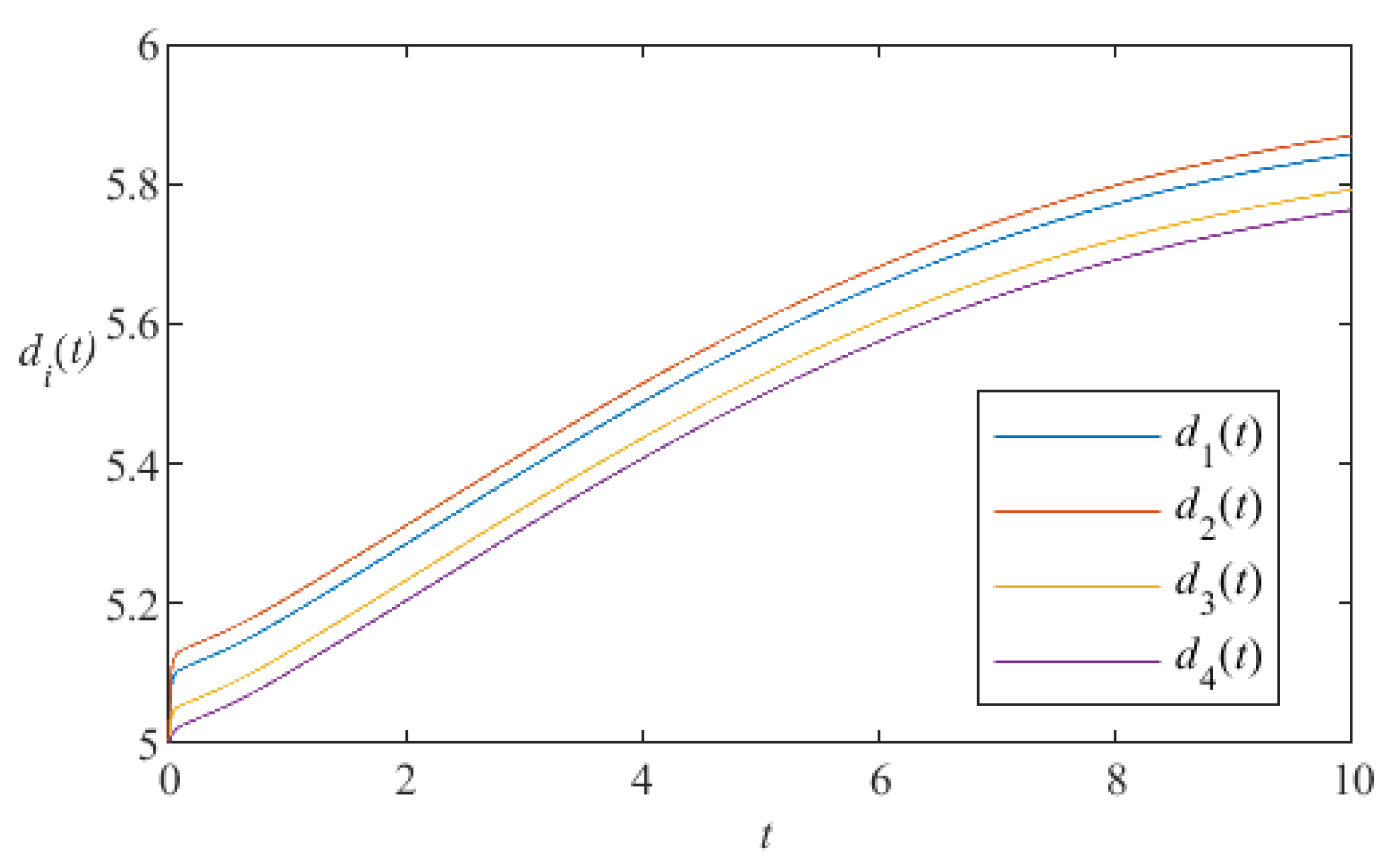
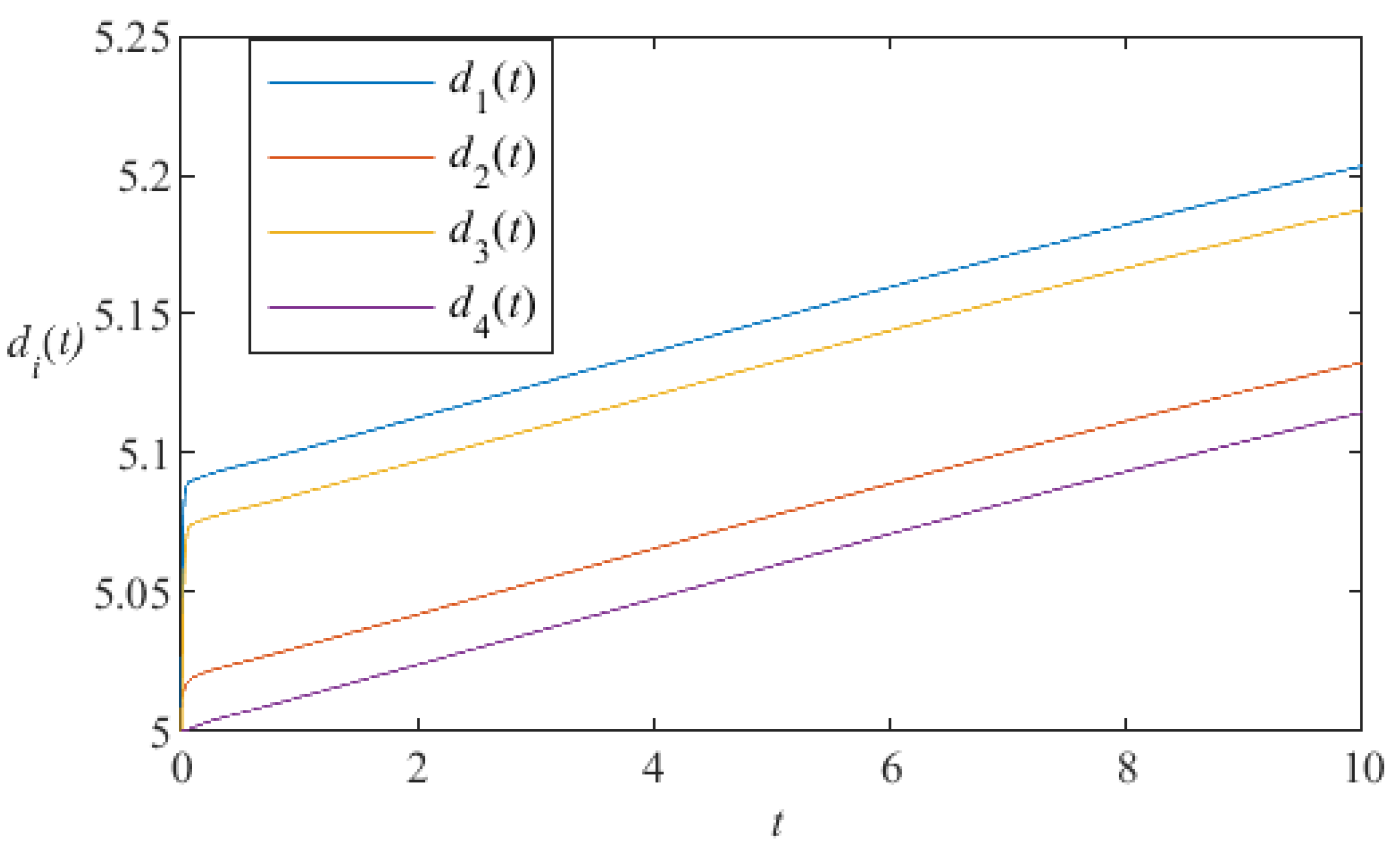
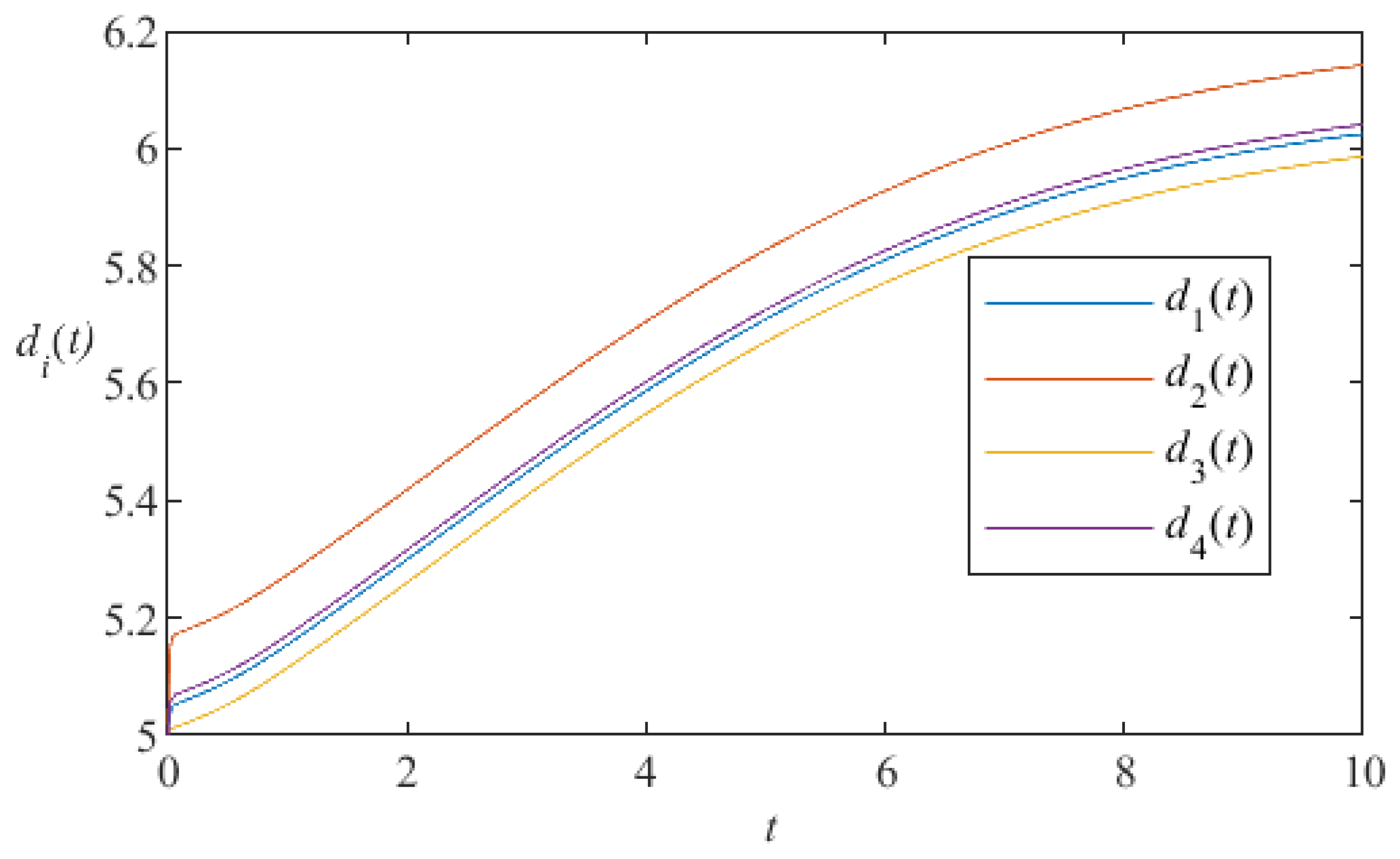
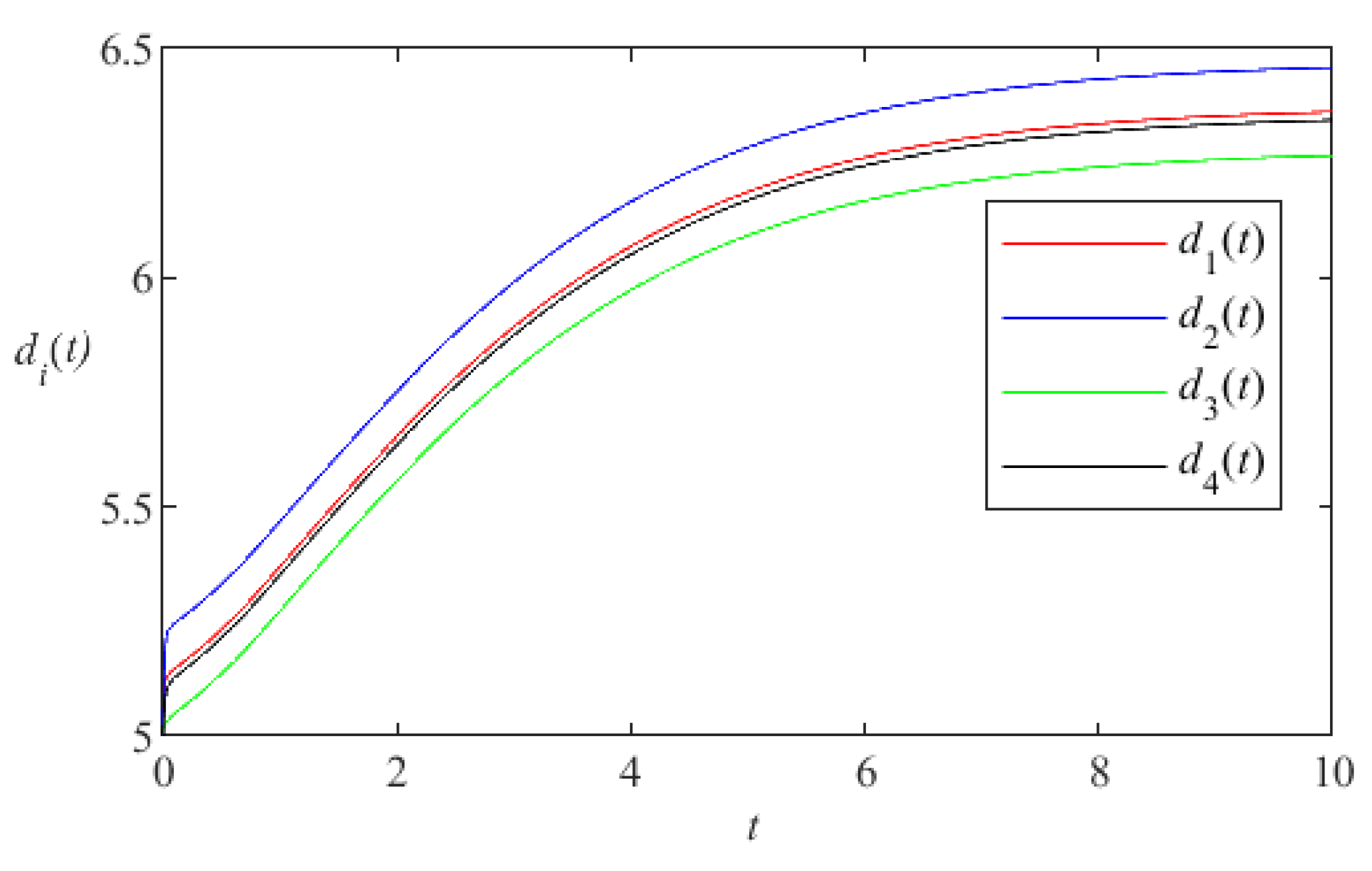
Through numerical simulation, it can be found that Figure 5 shows without an adaptive fault-tolerant controller. does not approach zero, that is to say, the leader-following PDEFOMAS cannot achieve consensus. Figure 6 shows the simulation results obtained after the use of a fault-tolerant controller with . Obviously, consensus errors tend to zero quickly, and the PDEFOMAS finally reaches consensus. Figure 7, Figure 8 and Figure 9 respectively show the consensus errors when (a fixed fault), (fault-free), (fault-free), and (a random fault). The corresponding control inputs of the leaderless PDEFOMAS are shown in Figure 10, Figure 11, Figure 12 and Figure 13. Figure 14, Figure 15, Figure 16 and Figure 17 shows the corresponding adaptive control gains.
Figure 5.
of the leader-following PDEFOMAS without adaptive control.
Figure 6.
of the leader-following PDEFOMAS with adaptive control and a varying fault.
Figure 7.
of the leader-following PDEFOMAS with adaptive control and without faults.
Figure 8.
of the leader-following PDEFOMAS with adaptive control and a fixed fault.
Figure 9.
of the leader-following PDEFOMAS with adaptive control and a random fault.
Figure 10.
The adaptive control input of the leader-following PDEFOMAS with a varying fault.
Figure 11.
The adaptive control input of the leader-following PDEFOMAS without faults.
Figure 12.
The adaptive control input of the leader-following PDEFOMAS with a fixed fault.
Figure 13.
The adaptive control input of the leader-following PDEFOMAS with a random fault.
Figure 14.
The adaptive control input gains of the leader-following PDEFOMAS with a varying fault.
Figure 15.
The adaptive control input gains of the leader-following PDEFOMAS without faults.
Figure 16.
The adaptive control input gains of the leader-following PDEFOMAS with a fixed fault.
Figure 17.
The adaptive control input gains of the leader-following PDEFOMAS with a random fault.
6. Conclusions
In this paper, we studied the fault-tolerant consensus adaptive control problem of PDEFOMASs based on PDEs with actuator faults. An adaptive fault-tolerant control protocol was proposed to use the information interaction among adjacent agents, which was suitable for both leaderless PDEFOMASs and leader-following PDEFOMASs, respectively. This control protocol dynamically addresses fault information during the process of system operation and reorganizes the controller to realize fault tolerance. The results show that the adaptive fault-tolerant control protocol can effectively realize consensus of PDEFOMASs with actuator faults. In future studies, we will continue to consider the fault-tolerant consensus of multi-agent systems with disturbance, delays, event triggers, and other factors.
Author Contributions
Conceptualization, Y.Y. and C.Y.; methodology, C.Y.; software, J.H.; validation, Y.Y., J.H. and C.Y.; formal analysis, J.H.; investigation, Y.Y. and Q.Q.; writing—original draft preparation, Y.Y. and Q.Q.; writing—review and editing, J.H., C.Y. and J.D.; funding acquisition, C.Y. and J.D. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by Key Science and Technology Planning Project of the Yunnan Provincial Science and Technology Department under Grant No. 202302AD080006, in part by Natural Science Foundation of Shandong Province under Grant No. ZR2022MF222, in part by Natural Science Research in Colleges and Universities of Anhui Province of China under Grant Nos. KJ2020A0362, KJ2020A0361, KJ2019ZD15, and in part by Anhui Natural Science Foundation under Grant No. 2108085MF213.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare that they have no conflict of interest.
References
- Yu, Y.; Peng, S.; Dong, X.; Li, Q.; Ren, Z. UIF-based cooperative tracking method for multi-agent systems with sensor faults. Sci. China Inf. Sci. 2019, 62, 10202. [Google Scholar] [CrossRef]
- Wang, W.; Li, C.; Guo, Y. Relative position coordinated control for spacecraft formation flying with obstacle/collision avoidance. Nonlinear Dyn. 2021, 104, 1329–1342. [Google Scholar] [CrossRef]
- Wang, C.; Yan, C.; Liu, Z. Leader-following consensus for second-order nonlinear multi-agent systems under Markovian switching topologies with application to ship course-keeping. Int. J. Control. Autom. Syst. 2021, 19, 54–62. [Google Scholar] [CrossRef]
- Yuchao, Z.; Yuan, J.; Jiyang, D. Dynamic Obstacle Avoidance Control of Three-order Multi-robot Cooperative Formation. J. Syst. Simul. 2022, 34, 1762. [Google Scholar]
- Zhao, Q.; Jiang, J. Reliable state feedback control system design against actuator failures. Automatica 1998, 34, 1267–1272. [Google Scholar] [CrossRef]
- Bounemeur, A.; Chemachema, M.; Essounbouli, N. Indirect adaptive fuzzy fault-tolerant tracking control for MIMO nonlinear systems with actuator and sensor failures. ISA Trans. 2018, 79, 45–61. [Google Scholar] [CrossRef]
- Maybeck, P.S. Multiple model adaptive algorithms for detecting and compensating sensor and actuator/surface failures in aircraft flight control systems. Int. J. Robust Nonlinear Control 1999, 9, 1051–1070. [Google Scholar] [CrossRef]
- Blanke, M.; Kinnaert, M.; Lunze, J.; Staroswiecki, M.; Schröder, J. Diagnosis and Fault-Tolerant Control; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Yin, S.; Luo, H.; Ding, S.X. Real-time implementation of fault-tolerant control systems with performance optimization. IEEE Trans. Ind. Electron. 2013, 61, 2402–2411. [Google Scholar] [CrossRef]
- Khalili, M.; Zhang, X.; Polycarpou, M.M.; Parisini, T.; Cao, Y. Distributed adaptive fault-tolerant control of uncertain multi-agent systems. Automatica 2018, 87, 142–151. [Google Scholar] [CrossRef]
- Deng, C.; Yang, G.H. Distributed adaptive fault-tolerant control approach to cooperative output regulation for linear multi-agent systems. Automatica 2019, 103, 62–68. [Google Scholar] [CrossRef]
- Liu, F.; Hua, Y.; Dong, X.; Li, Q.; Ren, Z. Adaptive fault-tolerant time-varying formation tracking for multi-agent systems under actuator failure and input saturation. ISA Trans. 2020, 104, 145–153. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Wang, J. Fault-tolerant tracking control for a class of nonlinear multi-agent systems. Syst. Control Lett. 2020, 135, 104576. [Google Scholar] [CrossRef]
- Dong, S.; Chen, G.; Liu, M.; Wu, Z.G. Cooperative neural-adaptive fault-tolerant output regulation for heterogeneous nonlinear uncertain multiagent systems with disturbance. Sci. China Inf. Sci. 2021, 64, 172212. [Google Scholar] [CrossRef]
- Yadegar, M.; Meskin, N. Fault-tolerant control of nonlinear heterogeneous multi-agent systems. Automatica 2021, 127, 109514. [Google Scholar] [CrossRef]
- Wang, J.W.; Wang, J.M. Spatiotemporal adaptive state feedback control of a linear parabolic partial differential equation. Int. J. Robust Nonlinear Control 2023, 33, 3850–3873. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, Y.; Wang, J.W.; Li, H.X. Backstepping-based distributed abnormality localization for linear parabolic distributed parameter systems. Automatica 2022, 135, 109930. [Google Scholar] [CrossRef]
- Christofides, P.D.; Chow, J. Nonlinear and robust control of PDE systems: Methods and applications to transport-reaction processes. Appl. Mech. Rev. 2002, 55, B29–B30. [Google Scholar] [CrossRef]
- Yu, Y.; Luo, X.; Liu, Q. Model predictive control of a dynamic nonlinear PDE system with application to continuous casting. J. Process Control 2018, 65, 41–55. [Google Scholar] [CrossRef]
- Lou, Y.; Christofides, P.D. Nonlinear feedback control of surface roughness using a stochastic PDE: Design and application to a sputtering process. Ind. Eng. Chem. Res. 2006, 45, 7177–7189. [Google Scholar] [CrossRef]
- Sidhu, H.S.; Narasingam, A.; Siddhamshetty, P.; Kwon, J.S.I. Model order reduction of nonlinear parabolic PDE systems with moving boundaries using sparse proper orthogonal decomposition: Application to hydraulic fracturing. Comput. Chem. Eng. 2018, 112, 92–100. [Google Scholar] [CrossRef]
- Panjapornpon, C.; Limpanachaipornkul, P.; Charinpanitkul, T. Control of coupled PDEs–ODEs using input–output linearization: Application to a cracking furnace. Chem. Eng. Sci. 2012, 75, 144–151. [Google Scholar] [CrossRef]
- Dai, J.; Yang, C.; Yan, X.; Wang, J.; Zhu, K.; Yang, C. Leaderless consensus control of nonlinear PIDE-type multi-agent systems with time delays. IEEE Access 2022, 10, 21211–21218. [Google Scholar] [CrossRef]
- Yang, C.; Huang, T.; Li, Z.; Zhang, A.; Qiu, J.; Alsaadi, F.E. Boundary control for exponential stabilization of nonlinear distributed parameter systems modeled by PIDEs. IEEE Access 2018, 6, 47889–47896. [Google Scholar] [CrossRef]
- Yang, C.; Li, Z.; Chen, X.; Zhang, A.; Qiu, J. Boundary control for exponential synchronization of reaction-diffusion neural networks based on coupled PDE-ODEs. IFAC-PapersOnLine 2020, 53, 3415–3420. [Google Scholar] [CrossRef]
- Li, Y.X.; Wang, Q.Y.; Tong, S. Fuzzy adaptive fault-tolerant control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 1372–1379. [Google Scholar] [CrossRef]
- Gong, P.; Lan, W.; Han, Q.L. Robust adaptive fault-tolerant consensus control for uncertain nonlinear fractional-order multi-agent systems with directed topologies. Automatica 2020, 117, 109011. [Google Scholar] [CrossRef]
- Zhao, L.; Zhao, F.; Che, W.W. Distributed adaptive fuzzy fault-tolerant control for multi-agent systems with node faults and denial-of-service attacks. Inf. Sci. 2023, 631, 385–395. [Google Scholar] [CrossRef]
- Zhang, X.; Zheng, S.; Ahn, C.K.; Xie, Y. Adaptive neural consensus for fractional-order multi-agent systems with faults and delays. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 7873–7886. [Google Scholar] [CrossRef]
- Zhang, J.; Tong, S. Event-triggered fuzzy adaptive output feedback containment fault-tolerant control for nonlinear multi-agent systems against actuator faults. Eur. J. Control 2023, In Press, 100887. [Google Scholar] [CrossRef]
- Ferdi, Y. Some applications of fractional order calculus to design digital filters for biomedical signal processing. J. Mech. Med. Biol. 2012, 12, 1240008. [Google Scholar] [CrossRef]
- Ma, C.; Hori, Y. Fractional-order control: Theory and applications in motion control past and present. IEEE Ind. Electron. Mag. 2007, 1, 6–16. [Google Scholar] [CrossRef]
- Kumar, S.; Saxena, R.; Singh, K. Fractional Fourier transform and fractional-order calculus-based image edge detection. Circuits Syst. Signal Process. 2017, 36, 1493–1513. [Google Scholar] [CrossRef]
- Jamil, A.A.; Tu, W.F.; Ali, S.W.; Terriche, Y.; Guerrero, J.M. Fractional-order PID controllers for temperature control: A review. Energies 2022, 15, 3800. [Google Scholar] [CrossRef]
- Yan, X.; Yang, C.; Cao, J.; Korovin, I.; Gorbachev, S.; Gorbacheva, N. Boundary consensus control strategies for fractional-order multi-agent systems with reaction-diffusion terms. Inf. Sci. 2022, 616, 461–473. [Google Scholar] [CrossRef]
- Yan, X.; Yang, C.; Yang, Y.; Wang, X.; Li, Z.; Huang, T. Boundary control for synchronization of fractional-order complex spatiotemporal networks based on PDEs with multiple delays and its application in image encryption. J. Frankl. Inst. 2023, 360, 5267–5291. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, C.; Yang, Y.; Li, N. Observer-based consensus of fractional order parabolic PDEs agents on directed networks via boundary communication. Chaos Solitons Fractals 2023, 170, 113332. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Seuret, A.; Gouaisbaut, F. Wirtinger-based integral inequality: Application to time-delay systems. Automatica 2013, 49, 2860–2866. [Google Scholar] [CrossRef]
- Tversky, A.; Gati, I. Similarity, separability, and the triangle inequality. Psychol. Rev. 1982, 89, 123. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, H. Bipartite consensus for multi-agent networks of fractional diffusion PDEs via aperiodically intermittent boundary control. Math. Biosci. Eng. 2023, 20, 12649–12665. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).