1. Introduction
In recent decades, consensus problems have attracted many people’s attention due to their applications in many fields such as social sciences, physics, control engineering, etc. Consensus of integer-order multi-agent systems (MASs) have been studied in many earlier studies [
1,
2,
3,
4,
5]. However, there are numerous phenomena that cannot be adequately described by integer-order dynamics, for instance, the synchronized motion of agents in fractional circumstances, like macromolecule fluids and porous media. Consequently, consensus of fractional-order multi-agent systems (FOMASs) were first studied in [
6]. In the past decade, FOMASs have attracted much attention, becoming a hot topic in the field of cooperative control [
7,
8,
9,
10].
Due to the diversity of each agent, the parameters of every individuality may not be identical, thus called heterogeneous. There are many studies about first-order, second-order or high-order MASs, which have heterogeneous dynamics among their agents [
11,
12,
13,
14]. Among these, the complete consensus is difficult to achieve by using static linear feedback control protocol. If the MASs have fractional-order (FO) dynamics, there are also some studies that are similar to those of the integer-order cases [
15,
16,
17,
18,
19,
20]. Note that orders of systems are also parameters in the FOMASs, and the incommensurate order is a distinctive feature of heterogeneous FOMASs. However, there are few studies about FOMASs with different order individualities. In [
21], the problem of finite-time consensus tracking for incommensurate nonlinear FOMASs has been investigated, where the communication topology of the MASs is directed and switched. In [
22], the problem of practical fixed-time bipartite consensus of a nonlinear incommensurate FOMAS via sliding-mode technique has been discussed, which has a general communication network with a signed directed graph. The above studies promote the finite-time stability theory of incommensurate order FO systems. But the orders of the leader in the above studies are known. In [
23], consensus control of incommensurate FOMASs with nonlinear and uncertain dynamics has been studied, in which, the order of the leader is unknown, and the authors have built an analysis frame about the consensus problem of incommensurate systems. However, only bounded consensus has been achieved in the paper.
This manuscript tries to address the tracking problem of heterogeneous FOMASs, in which both the orders and parameters of the leader are unknown. The radial basis function neural networks (RBFNNs) are designed to estimate the errors of the states among different orders, which help to establish the error dynamical equations. Furthermore, the Vector Lyapunov Function method is applied to analyze the stability of the error system. In summary, the contributions of this paper are the following: (1) Based on a positive system approach, the asymptotically stable criteria for incommensurate linear FO systems are derived, and some discussion about the existing literature has been presented. (2) A multi-agent system with incommensurate orders and parameters is used to track the leader with unknown order and parameters, and complete consensus can be achieved under the controllers in this manuscript. (3) An analysis frame of leader-following consensus is established by using the Vector Lyapunov Function method.
The main structure of the remaining part of this paper is organized as follows. In
Section 2, some fundamental definitions and lemmas of FO calculus are introduced, and the asymptotic stability of the positive incommensurate FO system is presented. The incommensurate heterogeneous FOMASs and the problem in this paper will be formally stated in
Section 3. The main results about sufficient conditions of consensus of the considered FOMASs are presented in
Section 4. In
Section 5, a simulation example is given to check the theoretical results. Finally, concluding remarks are presented in
Section 6.
Notations: Let be the set of natural integers. Let be the set of real numbers. and refer to the n-dimensional real vector and real matrices. Let () be n-dimensional real vector with non-negative elements. If , , then denotes . The superscript “T” denotes matrix transposition. denotes the n-dimensional identity matrix. For a vector , is defined as , and is defined as . For , and represents the maximum and minimum eigenvalue of P, respectively.
2. Fractional-Order Calculus with Caputo’s Operator
In this subsection, some preliminary knowledge of FO calculus is introduced first. Then, some introductions about the Mittag–Leffler function are introduced, which will be used in later sections. After which, the asymptotic stability of the positive incommensurate FO system is analyzed.
Definition 1 ([
24]).
For a continuous function : , the FO integral of order is defined by Definition 2 ([
24]).
Let function be differentiable on ; the Caputo FO derivative of order for is defined as Lemma 1 ([
24]).
Let for or for . If , thenIn particular, if and , then Lemma 2 ([
25]).
If a vector function is derivable on , we have the following inequality:where , and is a constant positive definite matrix. In FO calculus, the Mittag–Leffler function is significant, let . The following differentiation formula is an immediate consequence of the definition of the Mittag–Leffler function .
Lemma 3. Let ; then, . Consequently, let ; then, ; let ; then, , where , , are constants and in , , in .
Proof. According to the definition of
and the property of
that
, one has
Let
; then,
. Let
; then,
. This completes our proof. ☐
The Vector Lyapunov Function method will be the main tool in this paper. The analysis of the asymptotic stability of the positive incommensurate FO system is presented in the following Lemma. Considering the autonomous linear incommensurate FO system, in this paper, we assume the initial time as
:
where
,
,
,
.
Lemma 4 ([
26]).
Assume that the A is a Metzler matrix and also a Hurwitz matrix. Then, there exists such that . Lemma 5. Assume that R is a Metzler matrix and also a Hurwitz matrix; then, the system (1) is asymptotically stable for any . Proof. The system can be represented by components as the following:
Then, according to the theory of solution for nonhomogeneous linear FO differential equations (one can see Section 3.2 (pp. 54–56) of [
27]), it is easy to obtain
where
Integrating by parts, we obtain
According to Lemma 4, one can conclude that there must be an
, which is satisfied by
. By some simple calculations and using Lemma 3, we have
When
, one can obtain
,
. Then,
According to the system, one has
i.e.,
one can conclude that
Assume that there is a
such that
and
when
. Based on (
3), we have
which is contradictory; thus,
,
. Consequently,
is monotonically non-increasing and
.
Thus, one can conclude that
is existent and finite; assuming that
, one has
with
. Based on the Final Value Theorem of Laplace Transform, we have
and
, where
denotes the Laplace Transform of a function. Let
and
; then,
which implies that
; combined with R in nonsingular, one can obtain
with any initial condition
. ☐
Remark 1. Indeed, the above Lemma is a special case of Lemma 3 in [28]. In [28], to prove is monotonically non-increasing, the authors assume and then derive by analyzing FO system . However, according to the definition of FO derivatives,In general,Consequently, the proof of Lemma 3 in [28] may not appropriate. Based on the above Lemma, we have proved the monotonically non-increasing nature of via directly. 3. Preliminaries and Problem Formulation
3.1. Algebraic Graph Theory
In this subsection, we introduce some fundamental definitions pertaining to algebraic graph theory, which will serve as the basis for subsequent sections.
Let be a graph with N nodes, where , denote the set of nodes and edges, respectively. is a weighted adjacency matrix, where , if and ; otherwise, for all . The corresponding Laplacian matrix L is defined as if and .
3.2. System Model
In this subsection, the model of FOMASs will be introduced, and the problem formulation will be given. Considering the following heterogeneous FOMAS consists of
N agents with different orders, the FO dynamical model of the
ith agent is described as follows:
where
is the state of the
ith agent,
is the order of the
ith agent,
is a nonlinear vector value function,
is control input or the communication protocol of the
ith agent, which would be designed later, and
and
are constant matrices.
is assumed to satisfy the following Lipschitz condition throughout this paper:
Assumption 1. There are constants , such that, for any , Remark 2. Let . Then, for any diagonal matrices , according to the Assumption 1, one hasFurthermore, the above assumption is mild, which is fitted for many systems, such as Lorenz’s systems and Hopfield neural network systems, etc. The leader with unknown order is described as follows:
where
is the unknown order, and
and
are also unknown. In this paper, the
is designed as follows:
Let error signal
; one has
Let
; then, by some simple derivation, one can obtain the following error dynamic equation:
where
,
.
Assumption 2. The is bounded.
According to the above assumption and Assumption 1, one can conclude that is also bounded, i.e., there are constants and such that , , , where denotes the Euclidean norm of a vector.
Lemma 6 ([
29]).
If is a continuous function over a compact set , then there is a RBFNN such thatwhere is a prescribed accuracy, and the ideal weight vector ψ satisfiesand represents the approximation error, indicates the weight vector, in which being the number of the RBFNN nodes, and is the basis function vector withwhere stands for the center vector, and is the width of the Gaussian function. Lemma 7 ([
30]).
The FO continuous-time system is positive if and only if A is a Metzler matrix, where , are state and input vectors, , , , . 5. Numerical Simulations
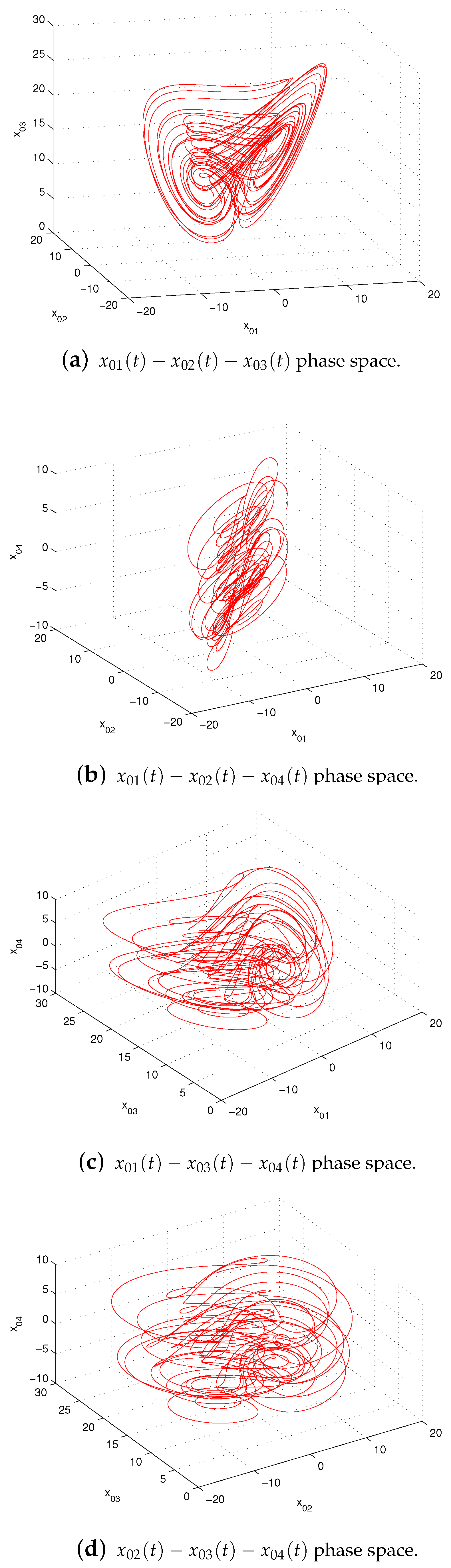
Consider a heterogeneous incommensurate FOMAS with four followers: , where , , and
in which,
,
,
; furthermore,
,
,
,
,
.
Under the above parameters, hyperchaos behaviors will occur of
. The phase portraits of the leader are shown in
Figure 1 with the initial values
. Let
be random between
. Then, without control, the states of
are shown in
Figure 2. It is obvious that they are chaotic, stable, unstable, etc. Let
,
,
, and
. It is easy to see that, without control, the synchronization error is toward infinity (due to
unstable). However, under control, the consensus can be achieved, and the states and errors are shown in
Figure 3 and
Figure 4, respectively.
Remark 3. Noting that the order is a significant parameter in the analysis of the dynamics of the fractional-order systems, if the orders are too low, namely, close to zero, the systems usually diverge to infinity. For example, if we set , then, the states of the leader can be seen in the Figure 5, where the steps of the simulation are selected as . Furthermore, the numerical algorithms of the fractional-order differential equations are in the stage of development; when the order is low, it is difficult to achieve high accuracy. When we set , , , , , as one can see in Figure 6. It is easy to see that, without control, the consensus cannot be achieved. However, under control, the consensus can be achieved, as one can see in Figure 7 and Figure 8. Furthermore, the dynamical behaviors are different from the manuscript. 6. Conclusions
In this paper, an incommensurate heterogeneous fractional-order multi-agent system has been studied. As a main theory tool, the Vector Lyapunov Function method for incommensurate fractional-order systems has been discussed. Then, a leader (target) with unknown parameters and orders has been tracked under a discontinuous distributed control protocol. Different from some existing studies, the complete consensus can be achieved with the proposed control strategy instead of a bounded consensus. In general, this manuscript has constructed the theoretical analytical framework for the leader-following consensus of incommensurate fractional-order multi-agent systems. As we all know, there exist many constraints in the communications among agents, such as time delay, stochastic disturbances, bandwidth limitation, etc. In the future, we will extend the framework of this manuscript to fit a more practical networked environment.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}