Abstract
An alignment mechanism for producing a sharp tip-separable microneedle device for trans-dermal drug delivery systems has been developed. The needle and base parts were placed on a mechanical precision motion stage to align their central axes. The overlapping region between them in the height direction was controlled by inserting a thickness gauge between them. A 400-μm-high sharp tip-separable microneedle device was successfully produced by using the developed alignment mechanism with an accuracy of less than 19 μm. We also demonstrated that it can be used to produce an arrayed tip-separable microneedle device.
1. Introduction
The trans-dermal drug-delivery system (DDS) is a promising approach for transferring drugs or biological compounds into the human body. Generally, approaches based on physical or chemical phenomena are used to enhance the drug penetration into human skin. A microneedle is an especially promising physical approach because it can penetrate the barrier of the stratum corneum located at the outmost layer of the skin, thus enabling us to transfer the macromolecular drug into the dermal layer located under the stratum corneum. Silicon was first used as the needle material in the early stage of the microneedle development because it has an excellent compatibility to the micromachining process developed by using MEMS technologies. The silicon microneedle has a high yield strength of a few GPa, but it suddenly brakes like a ceramic without prior warning if it has a defect or a crack because it is brittle.
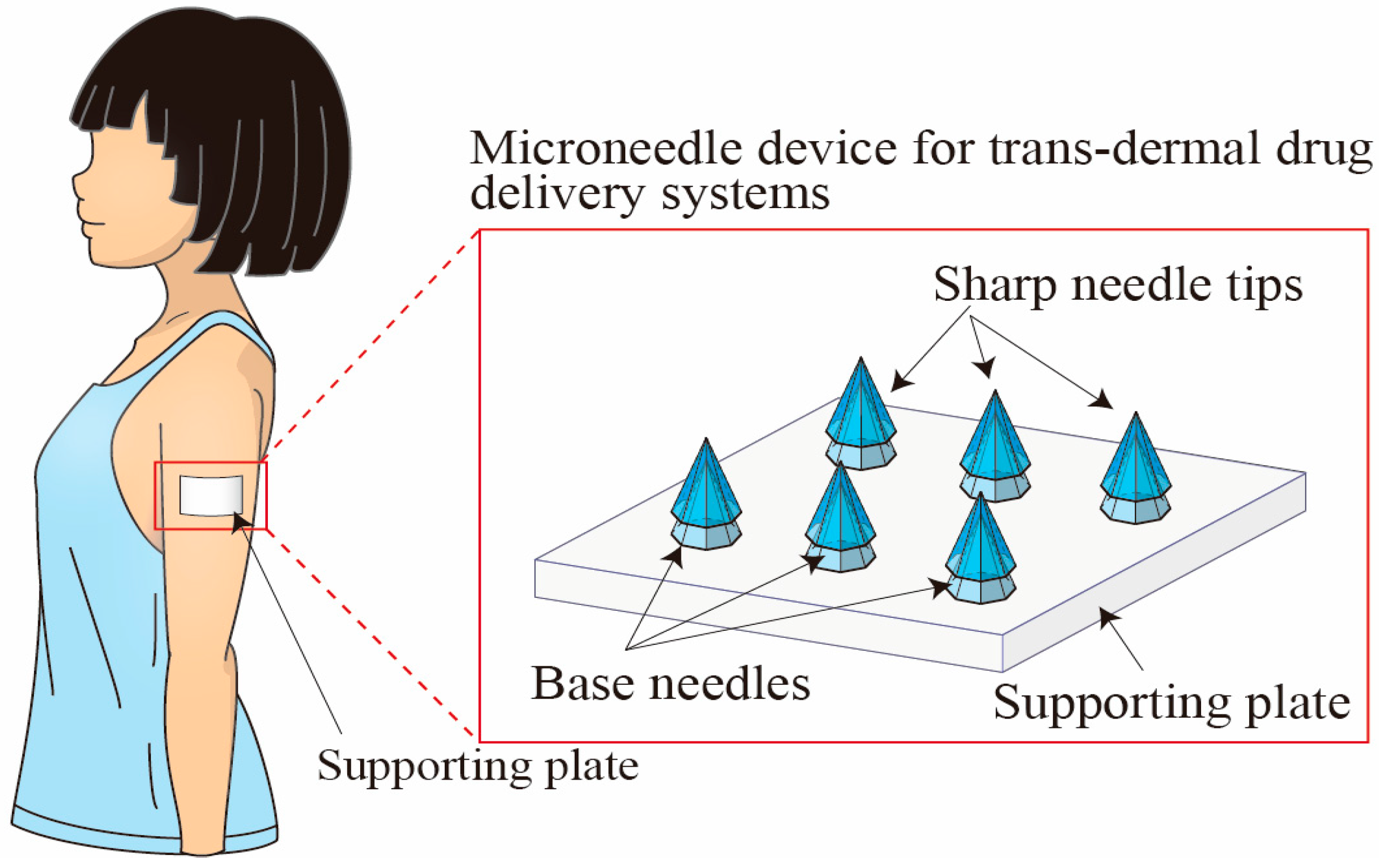
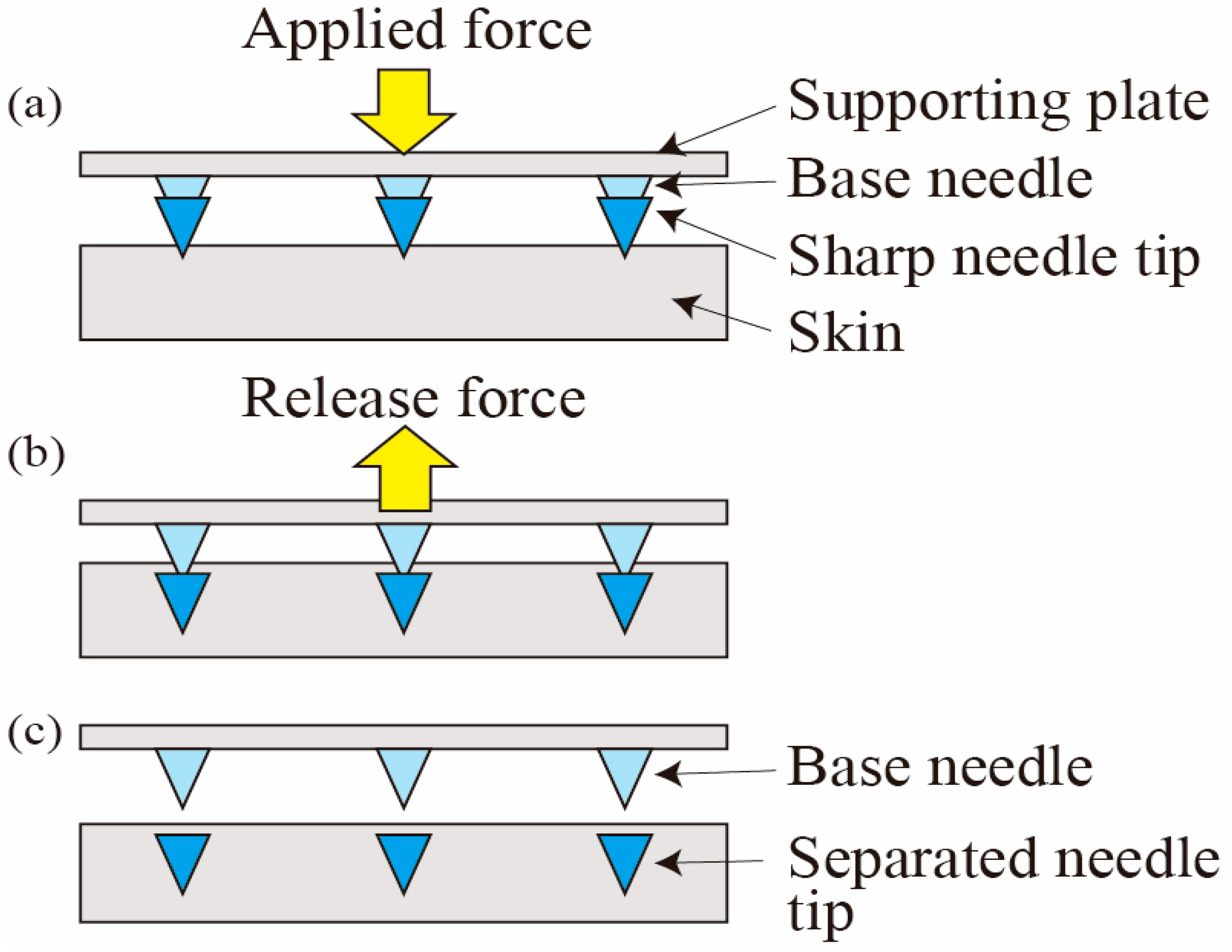
To overcome the silicon microneedle drawback, a biodegradable microneedle was previously developed as a trans-dermal DDS [1]. The drug material is normally included into the biodegradable microneedle structure and thus can be injected safely. In the case of the biodegradable microneedle, the drug components are gradually released as the needle dissolves. Thus, the microneedle has to be attached on the skin surface until most of it has dissolved in the skin. This means its attachment time strongly depends on its dissolution speed. To overcome this problem, a tip-separable microneedle device that has sharp biodegradable tips was developed to immediately inject drugs into the skin (Figure 1). Separating the tips after penetration drastically decreases drug-injection time (Figure 2) [2]. In a previous study, the proof-of-concept of the sharp-tip separable microneedle device was experimentally verified by using a manually produced needle [3]. A new mechanism for aligning tip and base parts in the mold process was developed to increase the production efficiency of the tip-separable microneedle device in this study.
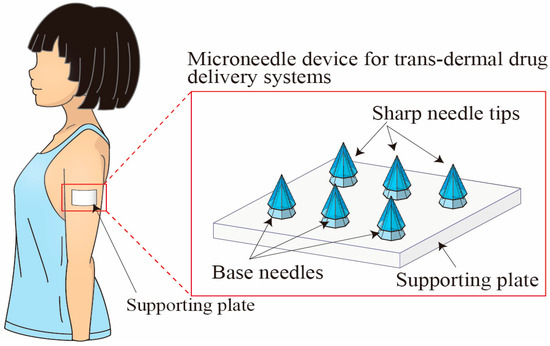
Figure 1.
Tip-separable microneedle device for trans-dermal drug delivery systems.
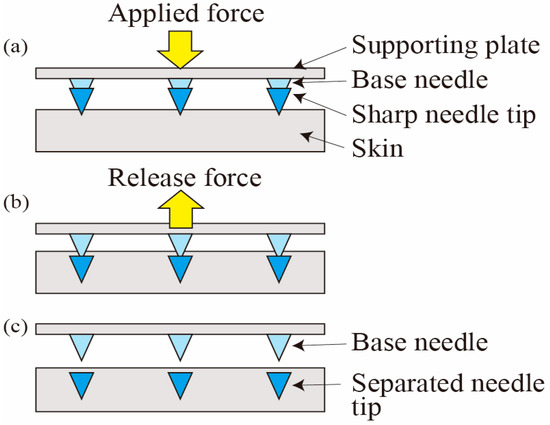
Figure 2.
Operation principle of tip-separable microneedle device.
2. Alignment Mechanism
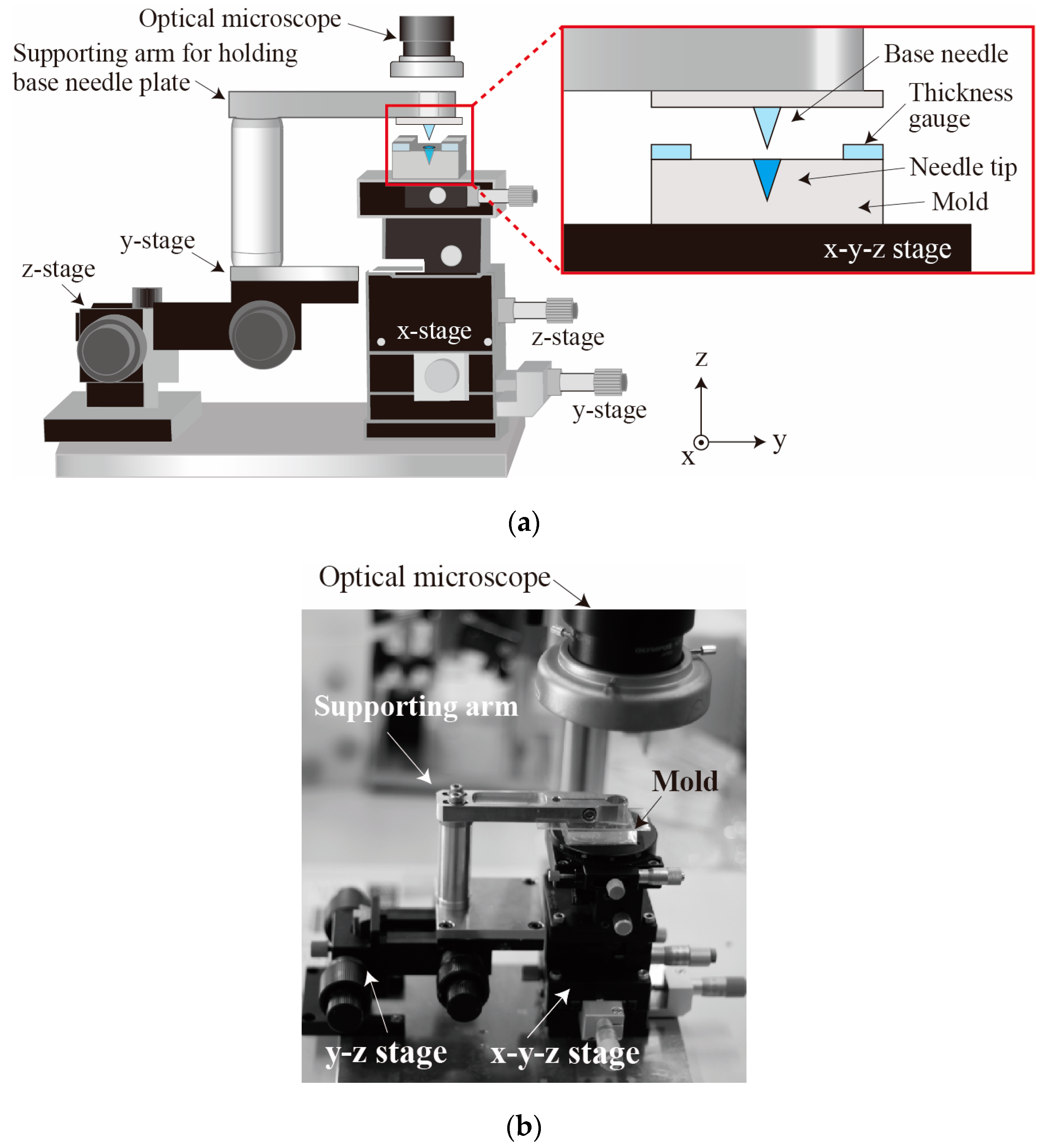
The developed alignment mechanism is shown in Figure 3. This equipment was produced by a combination of mechanical precision motion stages. The accuracy and the maximum stroke of the stage are 3.0 μm and ±6.5 mm, respectively. The supporting arm holds the base needle plate during the alignment. The hole was formed at the end of the arm to align the needle part to the base part by using an optical microscope image.
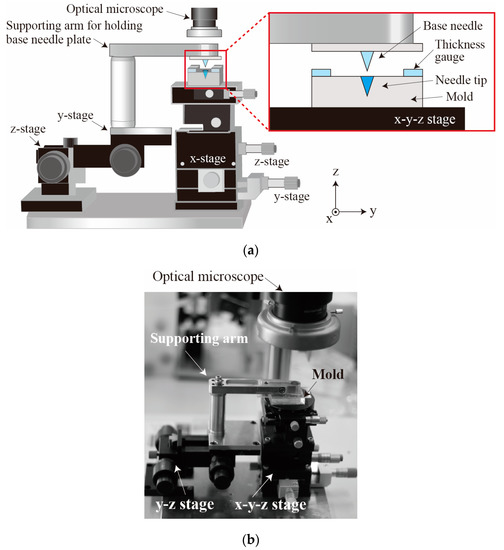
Figure 3.
Developed alignment mechanism for tip-separable microneedle device fabrication: (a) Schematic view; (b) Photograph.
3. Experiments
The needle and base parts were placed on the mechanical precision motion stage. Their central axes in x-y directions were aligned by controlling each stage independently. The microscope with a 50× optical magnification located over the mechanism was used for x-y direction alignments. The overlapping distance between the needle and base part in the height direction was controlled by inserting a thickness gauge between them. In this study, a pyramid-shaped needle was used for producing the tip-separable microneedle device. A single needle was 300 μm high. Epoxy resin liquid was used as the microneedle material for the alignment evaluation.
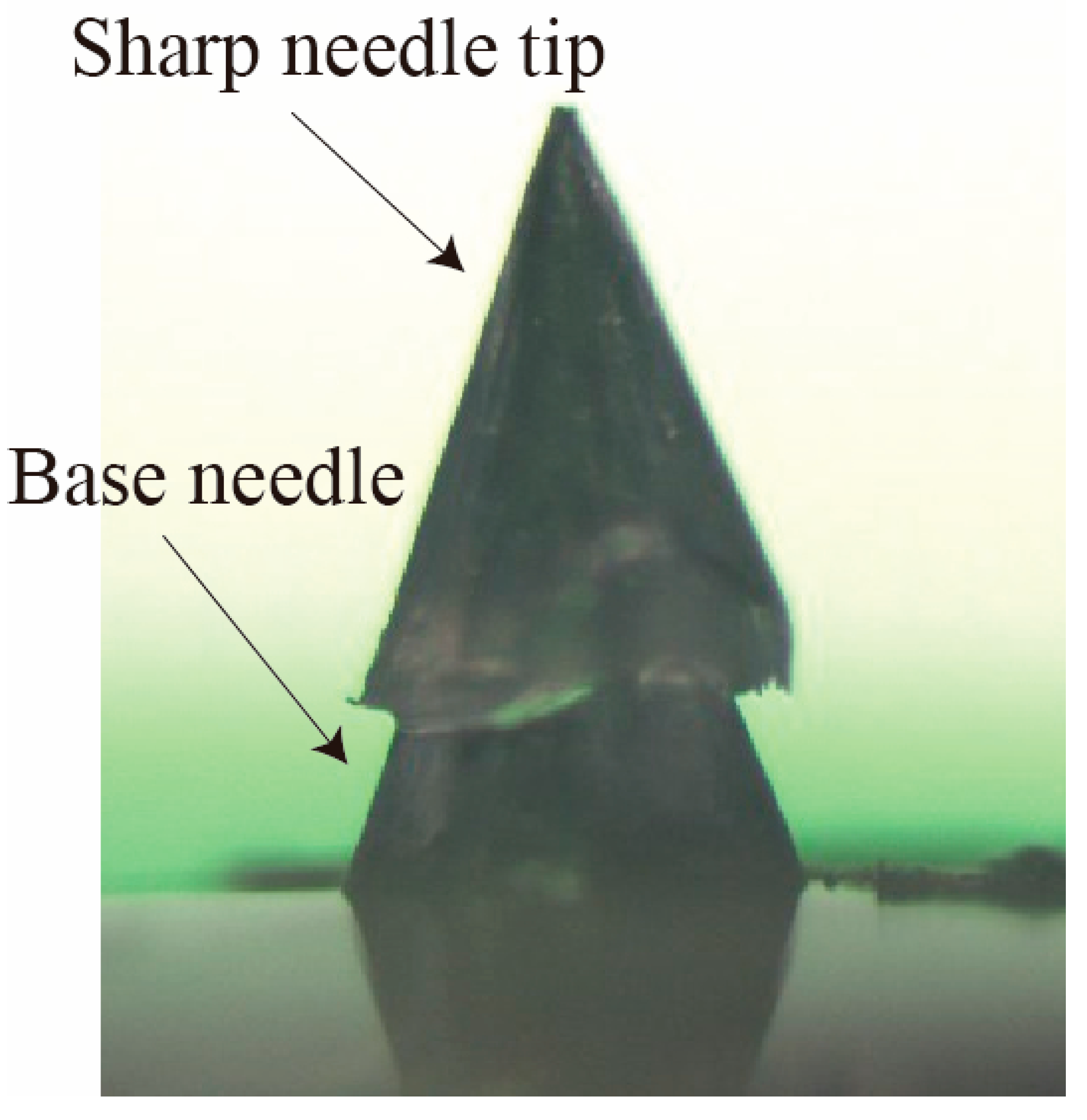
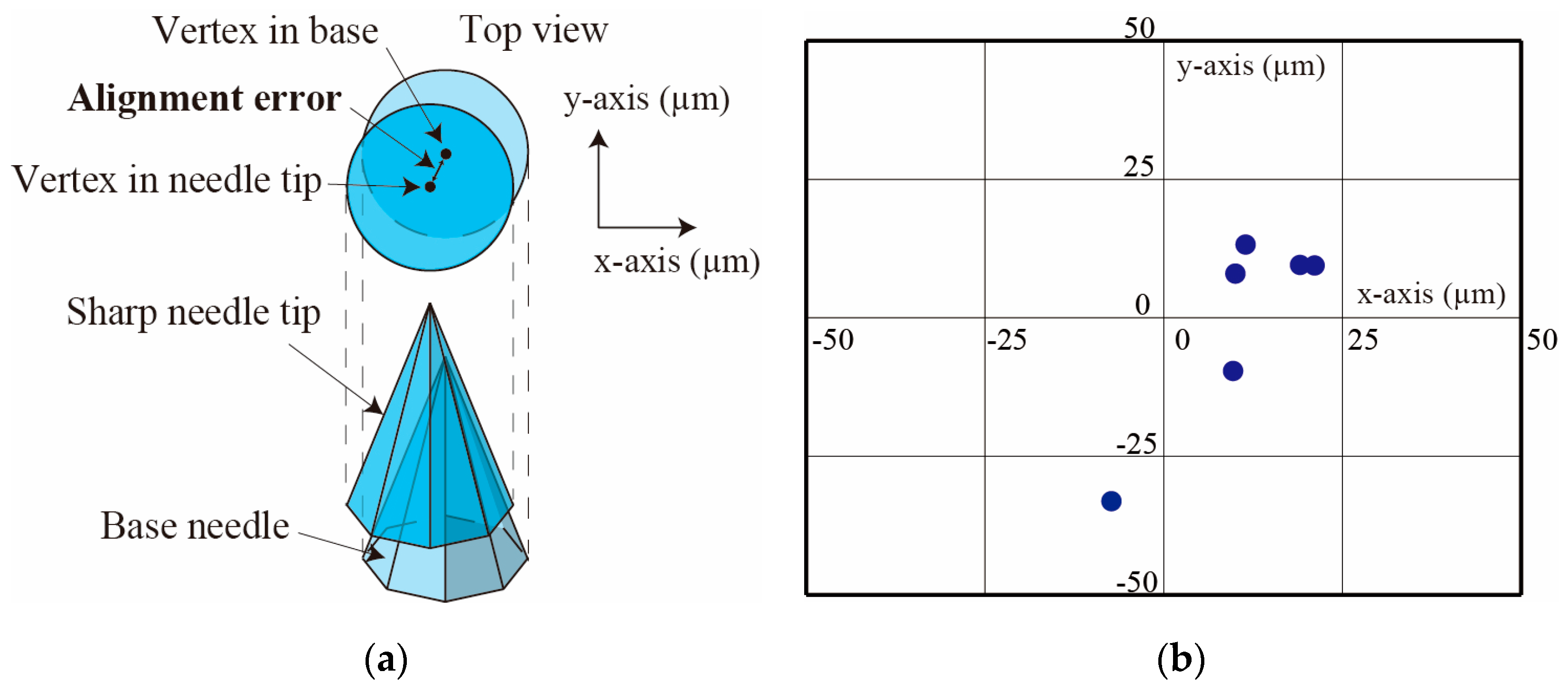
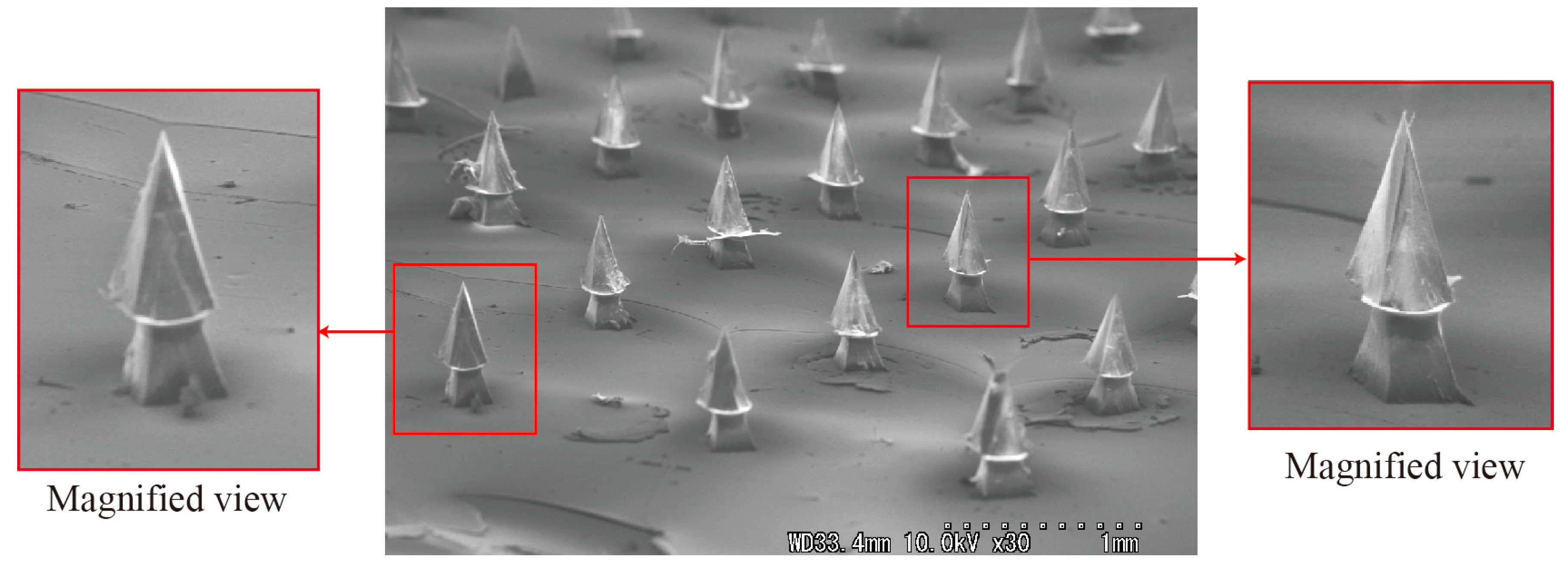
The base needle was aligned and inserted into the mold containing the needle tip by using the developed alignment mechanism. A 400-μm-high sharp tip-separable microneedle device was successfully produced (Figure 4). The overlapping distance between the needle and base parts was controlled with an accuracy of less than 21 μm error. The alignment error in x-y directions was defined as the distance between two vertexes in the needle tip and the base. The alignment errors of five of six devices were mostly coincident (Figure 5). Thus, we concluded that alignment mechanism has an accuracy of less than 19 μm in x-y directions. Finally, the arrayed tip-separable microneedle device was produced by applying the developed mechanism (Figure 6).
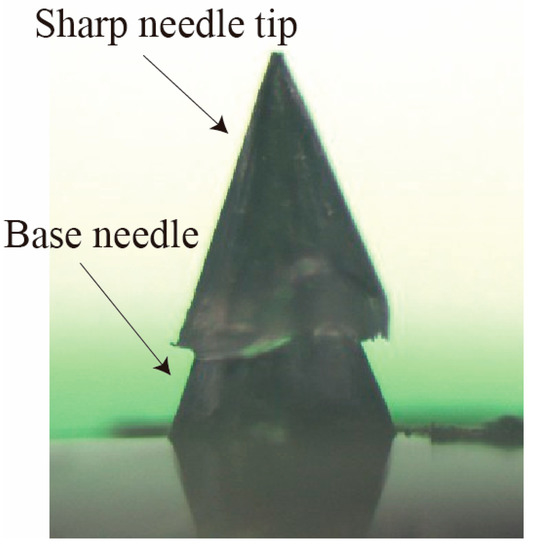
Figure 4.
Produced tip-separable microneedle device.
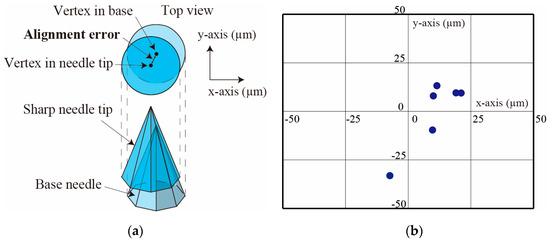
Figure 5.
Experimental results for alignment error in x-y directions: (a) Definition of alignment error in x-y directions; (b) Experimental results for alignment error.
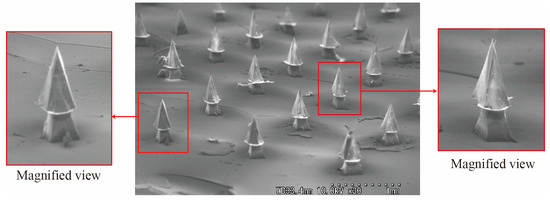
Figure 6.
Produced arrayed tip-separable microneedle device.
4. Conclusions
We developed a tip-separable microneedle device for trans-dermal drug delivery systems. Our contributions can be summarized as follows.
- (1)
- An alignment mechanism for producing a sharp tip-separable microneedle device for trans-dermal drug delivery systems was developed.
- (2)
- A sharp tip-separable microneedle device was successfully produced by using the developed alignment mechanism. The fabricated needle was about 400 μm high. The overlapping distance between the needle and base parts was controlled with an accuracy of less than 21 μm. Furthermore, the alignment error in x-y directions was controlled with an accuracy of less than 19 μm.
- (3)
- An arrayed tip-separable microneedle device was produced by applying the developed mechanism.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Shikida, M.; Kitamura, S.; Miyake, C.; Bessho, K. Micromachined pyramidal shaped biodegradable microneedle and its skin penetration capability. Microsyst. Technol. 2014, 20, 2239–2245. [Google Scholar] [CrossRef]
- Imaeda, K.; Bessho, K.; Shikida, M. Sharp tip-separable microneedle device for trans-dermal drug delivery systems. In Proceedings of the 2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015; pp. 1715–1718. [Google Scholar]
- Nabekura, Y.; Imaeda, K.; Hasegawa, Y.; Shikida, M. Insertion of tip-separable microneedle device for trans-dermal drug delivery systems. In Proceedings of the Technical Digit Asia-Paciific Conference Transducers and Micro-Nano Technology, Kanazawa, Japan, 26–29 June 2016; pp. 255–256. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).