Abstract
This paper presents the optical system design for the MEMS mirror-based SPAD LiDAR system. The transmitter of the proposed LiDAR system consists of related optics for incident beam expansion and a piezoelectric MEMS mirror for a wide-scanning field of view. For the receiver unit, an SPAD array is utilized to collect the laser beam reflected from the target objects at a smart factory. The optical system of the proposed LiDAR system is presented, designed, and analyzed in various ways.
1. Introduction
Compared to the conventional mechanical LiDAR system, light-steering MEMS mirrors have been utilized for compact, cost-effective, and high-performance LiDAR systems [1]. In this paper, a MEMS mirror-based SPAD LiDAR system for smart factory applications is proposed, optimized for real-time safety monitoring of working environments. This paper mainly deals with the significant optical design points for the SPAD LiDAR system using a MEMS mirror.
2. Piezoelectric MEMS Mirror-Based SPAD LiDAR System
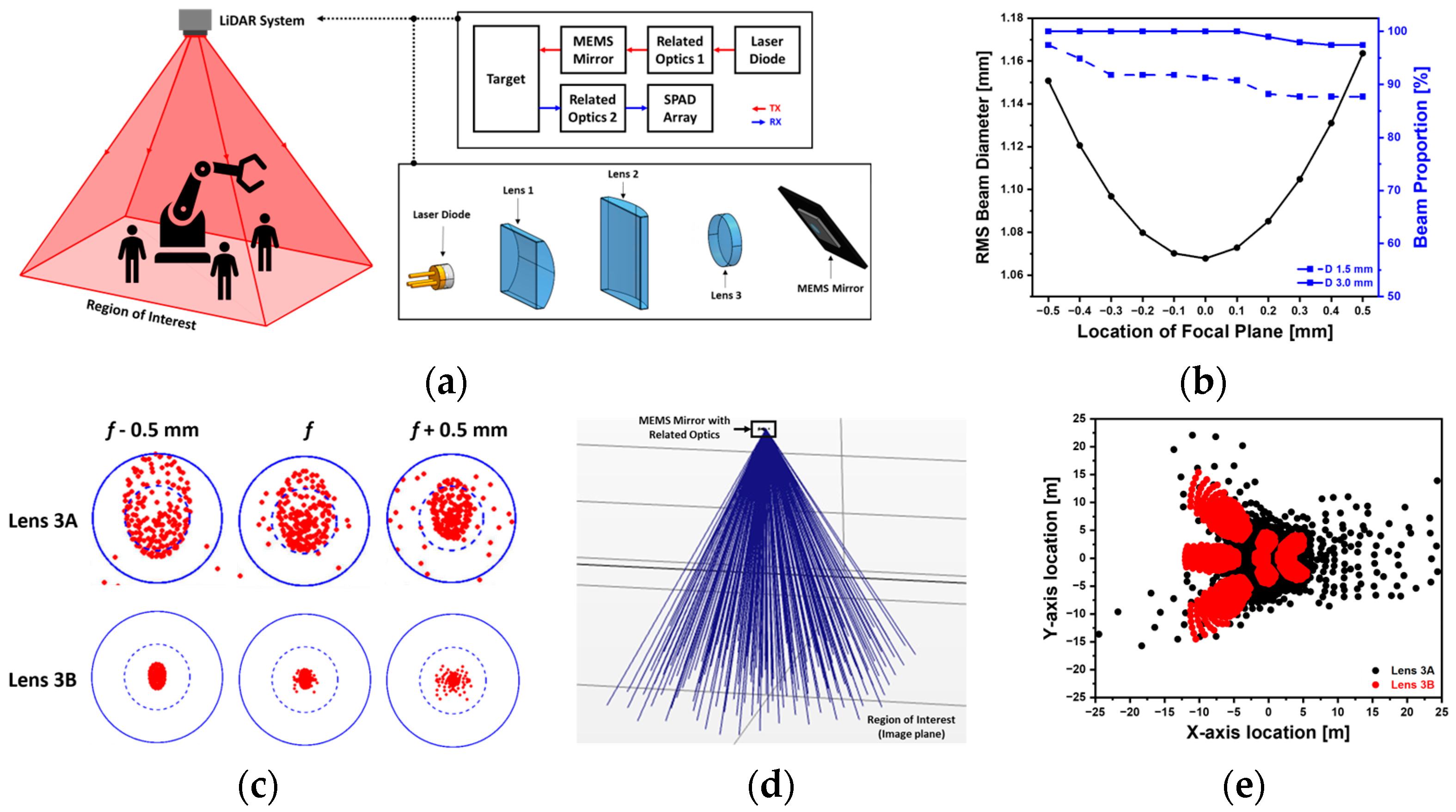
The proposed piezoelectric MEMS mirror-based SPAD LiDAR system is shown in Figure 1a. The 905 nm pulsed laser beams pass through the related optics 1 and are reflected by the MEMS mirror with a total optical scan angle (TOSA) of 90°. The reflected laser beams are captured by the SPAD array and the target distance is estimated by the direct time-of-flight (dToF) method [2]. The emitted laser beams are collimated by the two plano-convex cylindrical lenses (Lenses 1 and 2) and focused by the double-convex lens (Lens 3) to irradiate the mirror’s reflective surface. The MEMS mirror is placed in the focal plane of the related optics and tilted to prevent clipping from the front optics. The laser beam reflected by the MEMS mirror diverges to increase the number of active SPAD pixels per frame and thus increase the detected samples for improved detector performance.
Figure 1.
(a) Schematic description of the proposed LiDAR system; (b) RMS beam diameter and beam proportion within various diameters of MEMS mirrors depending on the location of the MEMS mirror device; (c) comparisons of spot diagrams with different divergence angles of Lens 3; (d) resultant reflected ray trajectories; and (e) distributions at ROI under a MEMS mirror rotation of ±45°.
3. Results and Conclusions
Finite element analysis-based ray-tracing simulation (COMSOL v6.1) is utilized to analyze the designed optical systems, and the static and dynamic states of the MEMS mirror device are considered. To minimize the required reflective mirror diameter, the MEMS mirror is located at the focal plane of the related optics, and the beam proportion within the various diameters of the mirror plate is analyzed (Figure 1b).
The desired initial tilting angle (θint) is shown in Equation (1) where θdiv is the divergence angle of Lens 3 and θTOSA is the TOSA of the MEMS mirror. The effect of different lens divergence angles is characterized as shown in Table 1. For Lens 3B with increased effective focal length (f), the needed diameter of the mirror (Drms) can be reduced by 5.1 times and an enhanced beam proportion (P) can be expected compared to Lens 3A with the cost of the optical system volume (Vopt) (Figure 1c). Although the area illuminated by the resultant laser scan (AROI) is decreased, the target region of interest (ROI) of ±4 × 4 m2 can be completely covered and an improved SNR level of the SPAD detector can be expected with increased laser intensity per unit area (Figure 1e). Based on the ray analysis results, further research on the experimental demonstration of the proposed LiDAR system is ongoing. More results and discussion on optimization will be reported in this paper.
θint = ⌈θdiv/2 + θTOSA/4⌉

Table 1.
Comparisons of Lenses 3A and 3B.
Author Contributions
Conceptualization, Writing—review and editing (J.-Y.H., P.R., A.H., M.L., S.W. and S.G.-S.); Methodology, Software (J.-Y.H., P.R. and A.H.); Visualization, Writing—original draft preparation (J.-Y.H.); Supervision, Project administration, Funding acquisition (M.L. and S.G.-S.). All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Fraunhofer-Gesellschaft of Lighthouse projects, Fraunhofer flagship project NeurOSmart (840282).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author due to legal restrictions.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Wang, D.; Watkins, C.; Xie, H. MEMS Mirrors for LiDAR: A Review. Micromachines 2020, 11, 456. [Google Scholar] [CrossRef] [PubMed]
- Burkard, R.; Ligges, M.; Merten, A.; Sandner, T.; Viga, R.; Grabmaier, A. Histogram formation and noise reduction in biaxial MEMS-based SPAD light detection and ranging systems. J. Opt. Microsyst. 2022, 2, 011005–011016. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).