


Research on Identification and Location of Mining Landslide in Mining Area Based on Improved YOLO Algorithm


Abstract
1. Introduction
2. Study Area and Data Collection
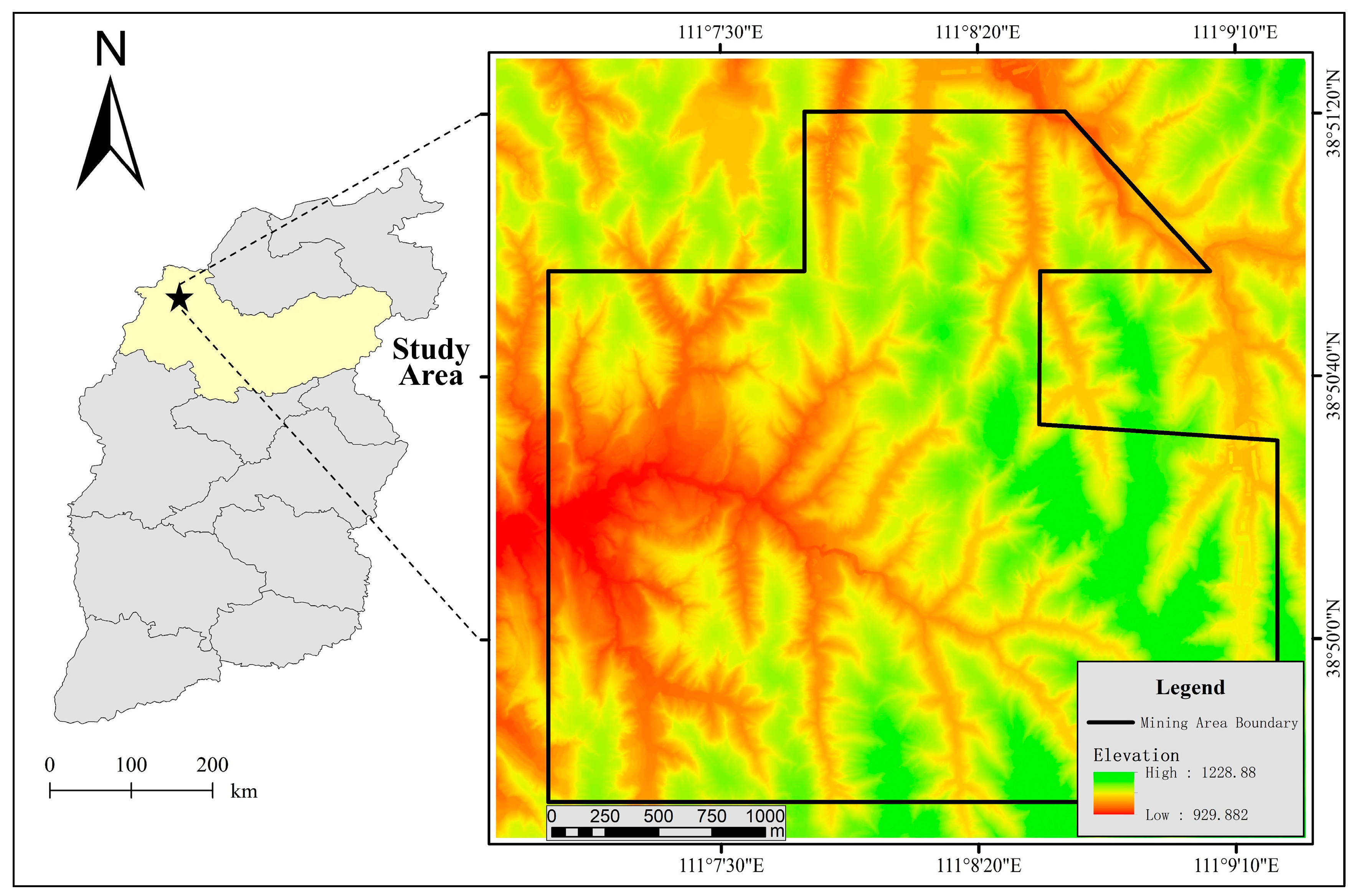
2.1. Study Area
2.2. Data Collection
3. Method
3.1. Construct a Landslide Sample Data Set
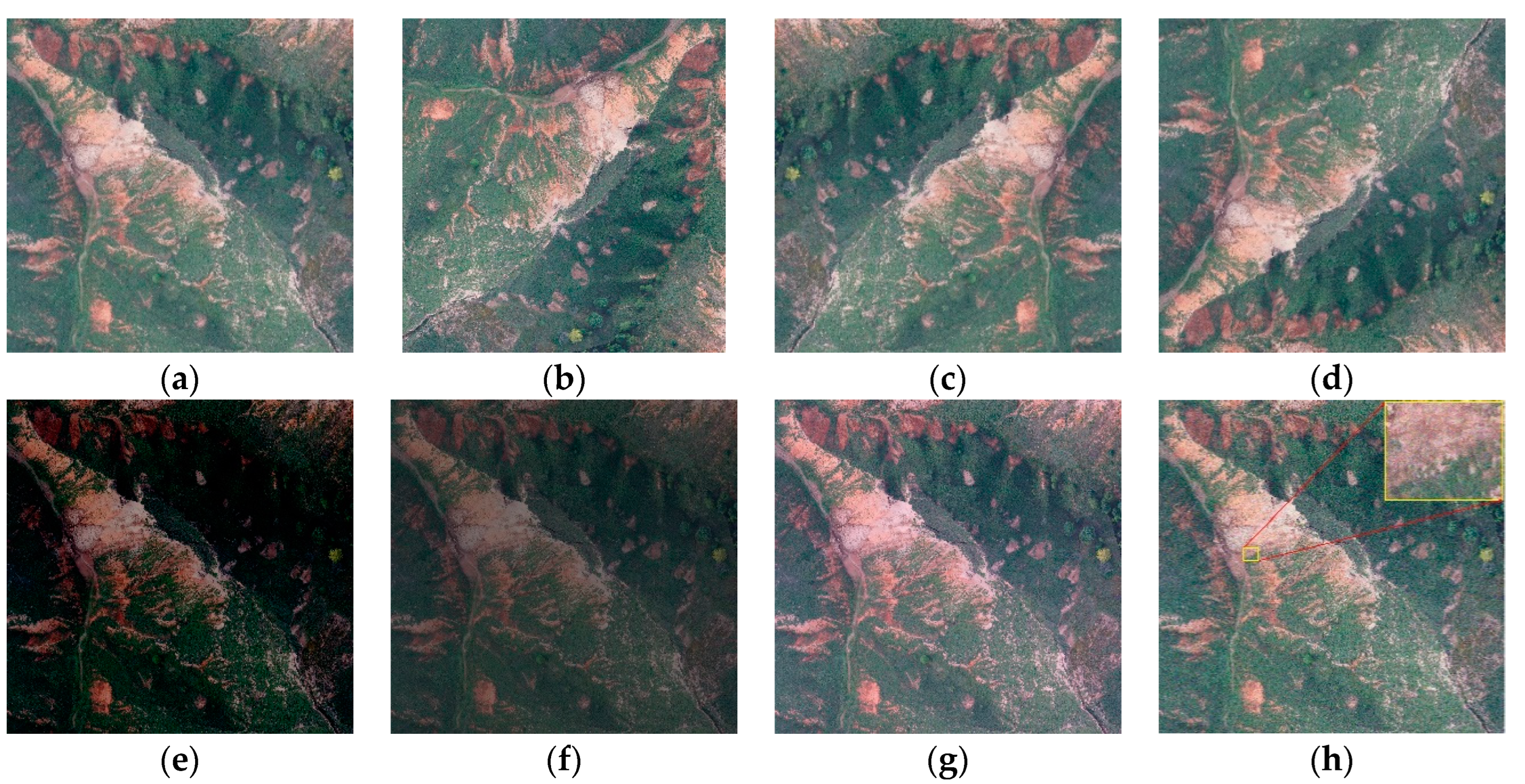
3.1.1. Geometric Transformation
3.1.2. Color Transformation
3.2. Landslide Detection Method in Mining Area
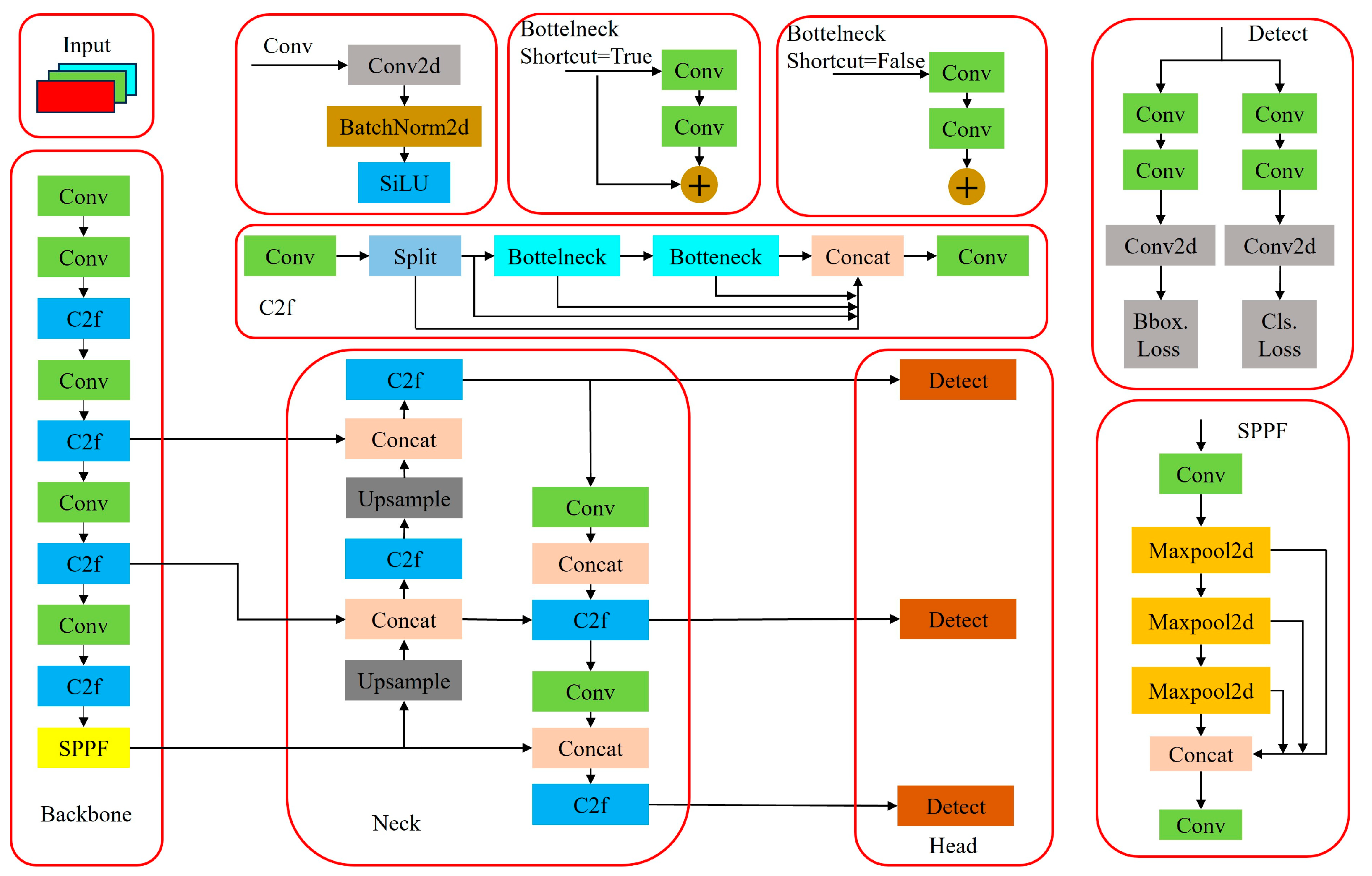
3.2.1. YOLOv8 Model
- Compared with YOLOv5 and YOLOv7 algorithms, YOLOv8 has greatly improved training time and detection accuracy, and the weight file of the model is only 6 MB, which can be deployed to any embedded device. It can meet the needs of real-time detection with its fast and efficient performance.
- Since the YOLOv8 algorithm is an inherited version of YOLOv5, it provides models of different scales such as n, s, m, l, and x to meet the needs of different scenarios. While the accuracy is greatly improved, it can be smoothly trained and installed on various hardware platforms.
- On the input side, the YOLOv8 uses Mosaic data enhancement [14], adaptive anchor box calculation [15] and other methods. The Mosaic data enhancement technique involves splicing images using random scaling, random cropping, and random arrangement to augment the detection data set. Through differential computation, reverse updating, and other operations, the calculation of adaptive anchor box enables the determination of optimal anchor frame values.
- At the output end, the YOLOv8 uses the decoupling head to replace the previous coupling head, decouples the classification and regression into two independent branches, and makes the task more focused through decoupling, which solves the problem of inaccurate positioning and classification errors in complex backgrounds. At the same time, the YOLOv8 also borrows the idea of DFL [16] and uses the Anchor-free target detection method [17] to make the network focus on the adjacent points of the target position faster, so that the prediction box is closer to the actual bounding box area.
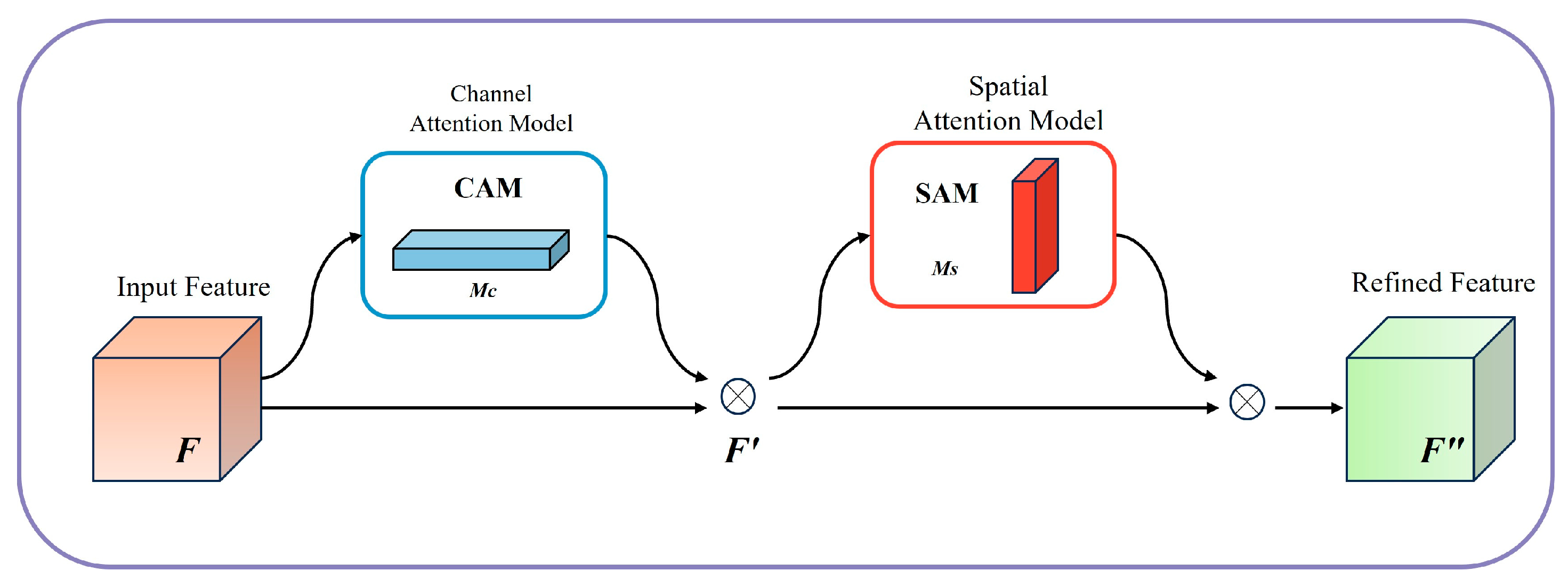
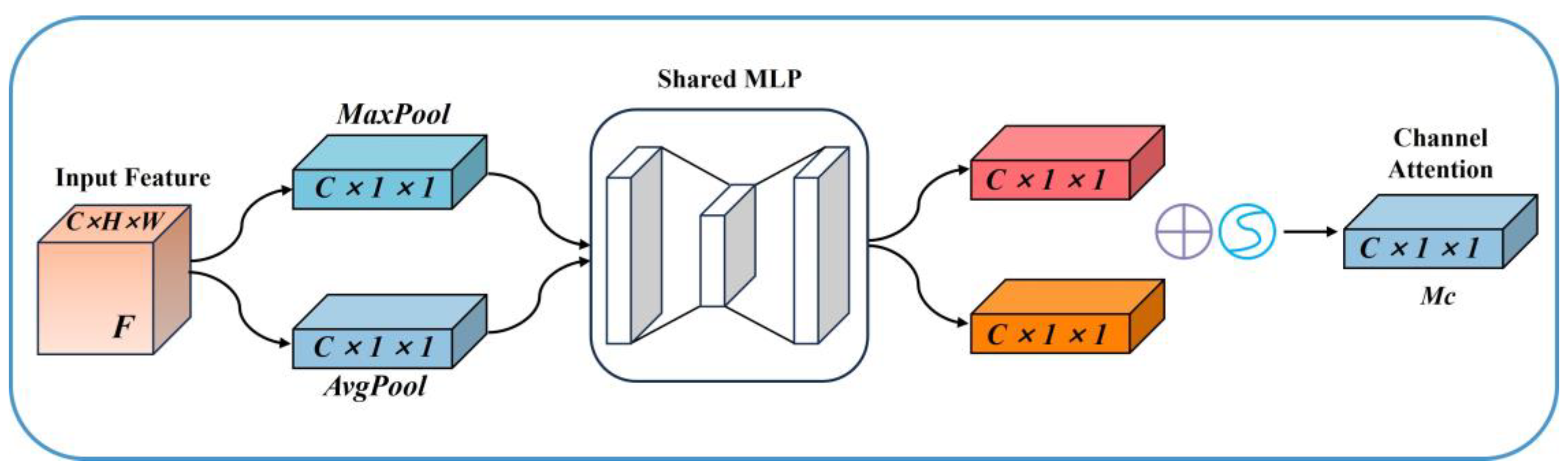
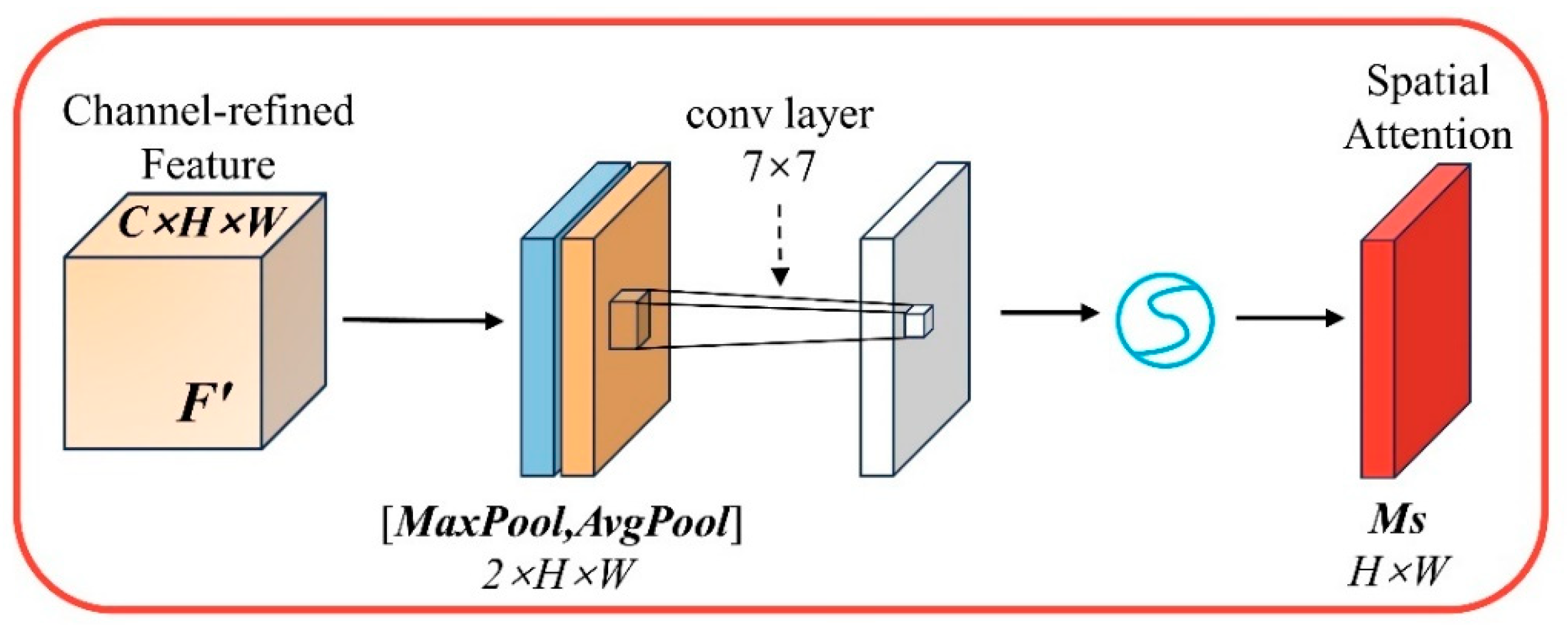
3.2.2. Embedding Attention Mechanism
- (1)
- Channel attention module (CAM)
- (2)
- Spatial Attention Module (SAM)
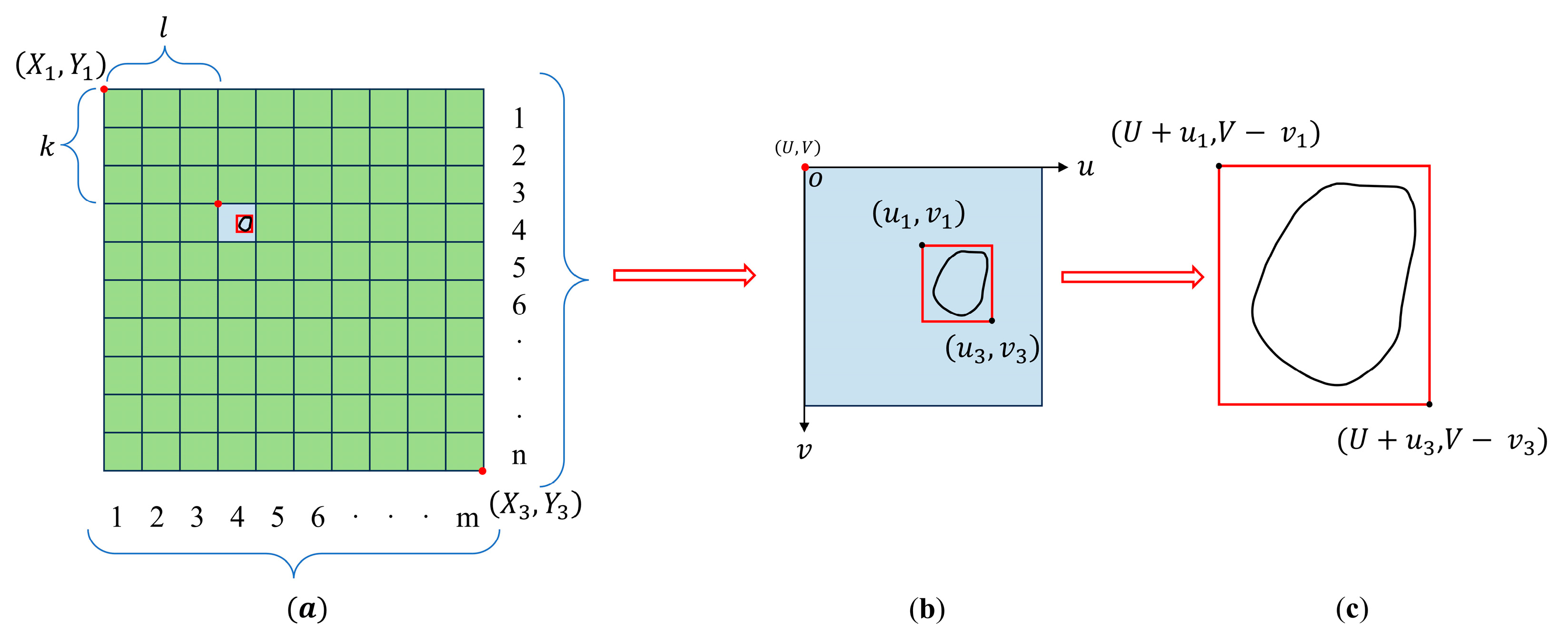
3.3. Landslide Identification Results Positioning Method
4. Results and Analysis
4.1. Experiment Environment
4.2. Model Accuracy Assessment
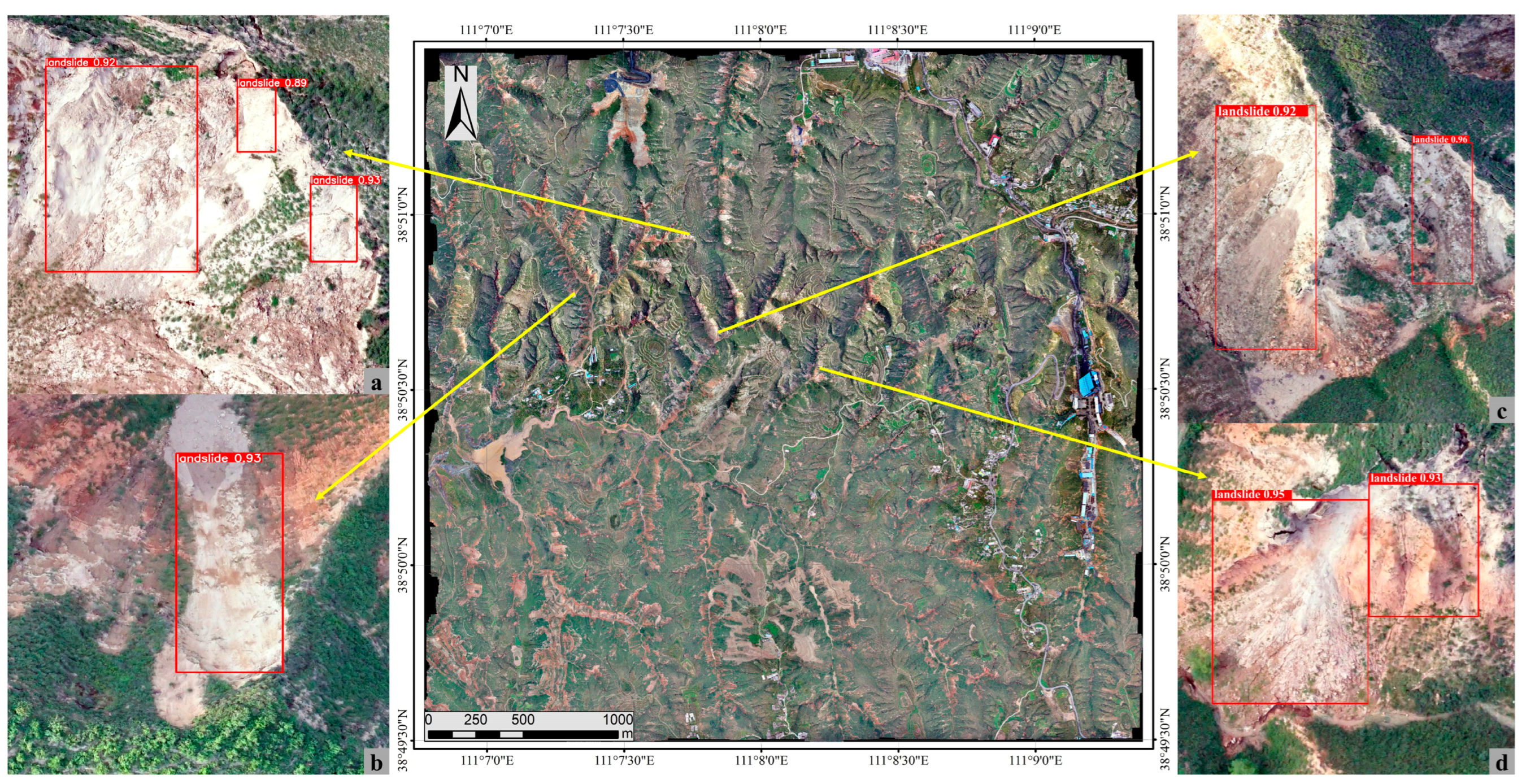
4.3. Landslide Detection Results
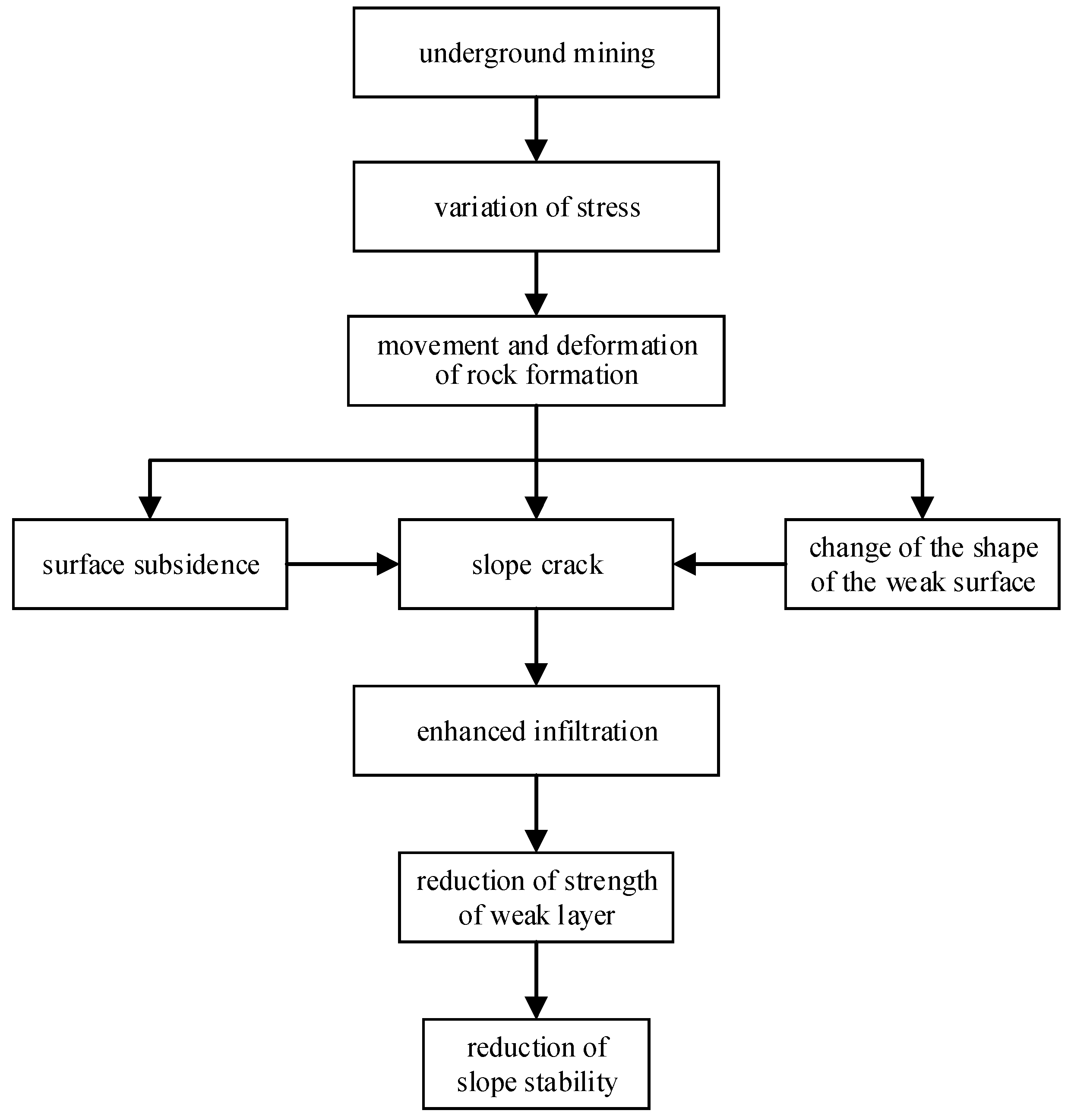
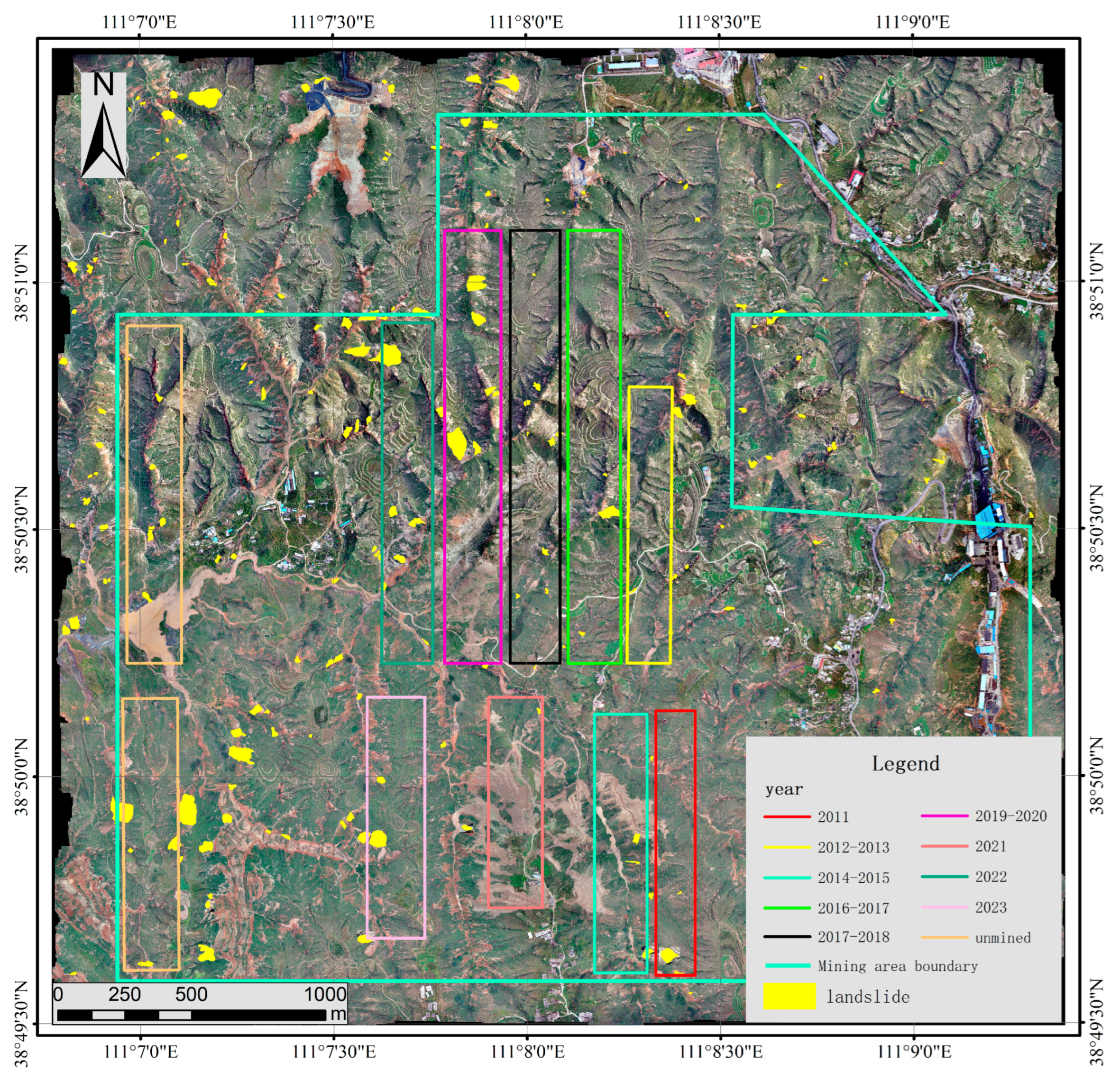
4.4. The Influence of Underground Mining on Landslide in Mining Area
4.5. Landslide Changes
5. Discussion
- In this study, a landslide data set of UAV remote sensing image in mining area was constructed. However, due to the insufficient amount of data, we enhanced the image to achieve the purpose of expanding the dataset. The expanded landslide dataset can complete the training of the model, which is suitable for the training of the mining landslide recognition model in the mining area. However, there are also some shortcomings: image enhancement methods may cause image distortion or unreality, affecting the generalization performance of the model.
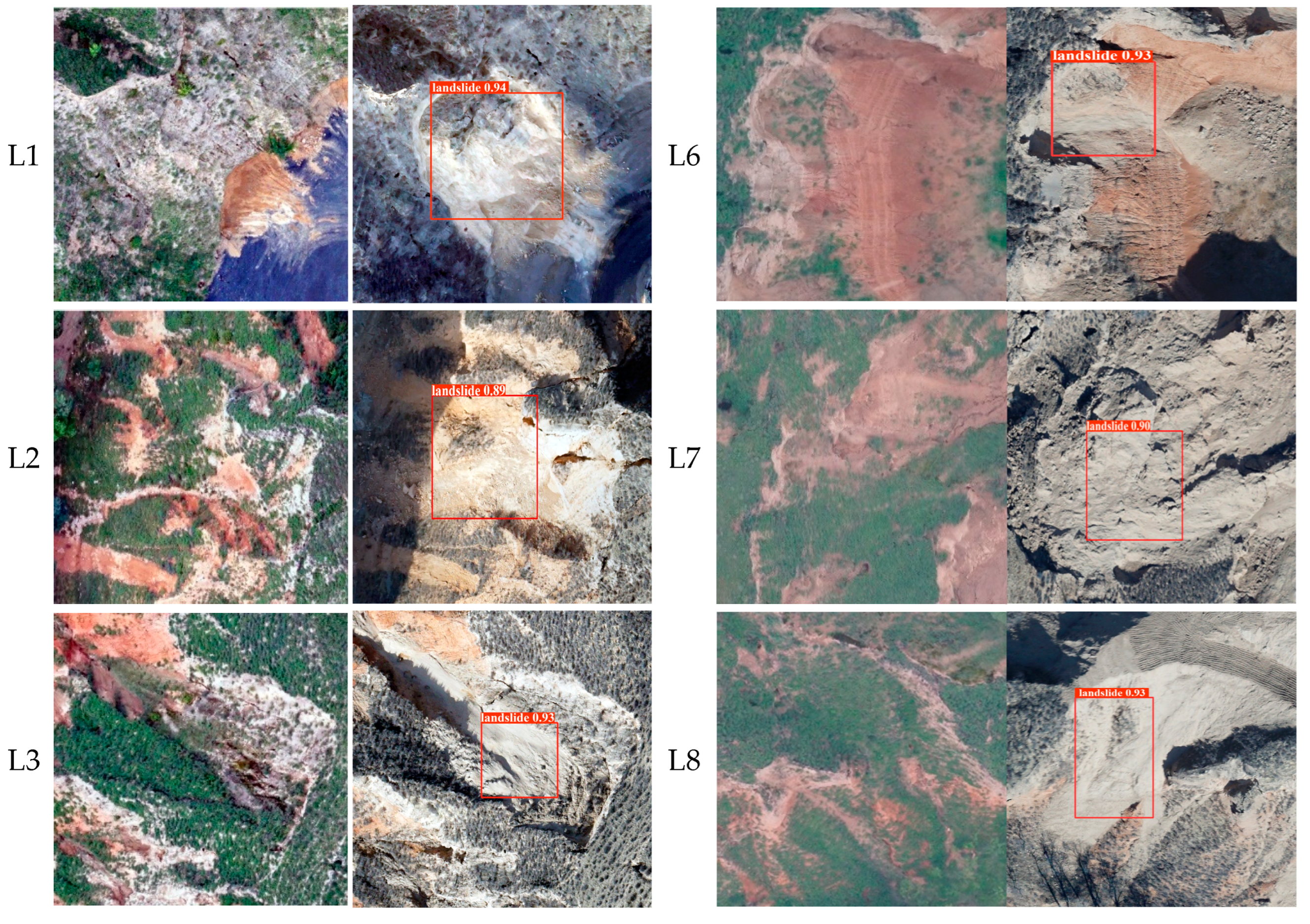
- This study innovatively uses the improved model to monitor the landslide in the mining area, which can accurately identify the location of the landslide area. The precision of landslide identification in [8] is 83.9%, and the precision of landslide identification using the model in this paper reaches 93.1%. Compared with the method in [8], the landslide recognition method proposed in this study has significantly improved the recognition accuracy. However, the model in the paper cannot calculate the specific parameters such as the area and slope of the landslide, and the relevant parameters can be obtained by means of image segmentation.
- Cheng et al. [23] used the improved YOLOv4 model to complete the identification of landslides, and the precision was 94.08%, which was equivalent to the precision of the model in this paper. However, due to the limitations of its algorithm, it is impossible to obtain the location information of the recognition results. The landslide recognition result positioning algorithm proposed in this paper can accurately obtain the location information of the landslide, effectively make up for the shortcomings of reference [23], and provide the necessary positioning for the accurate treatment of landslides.
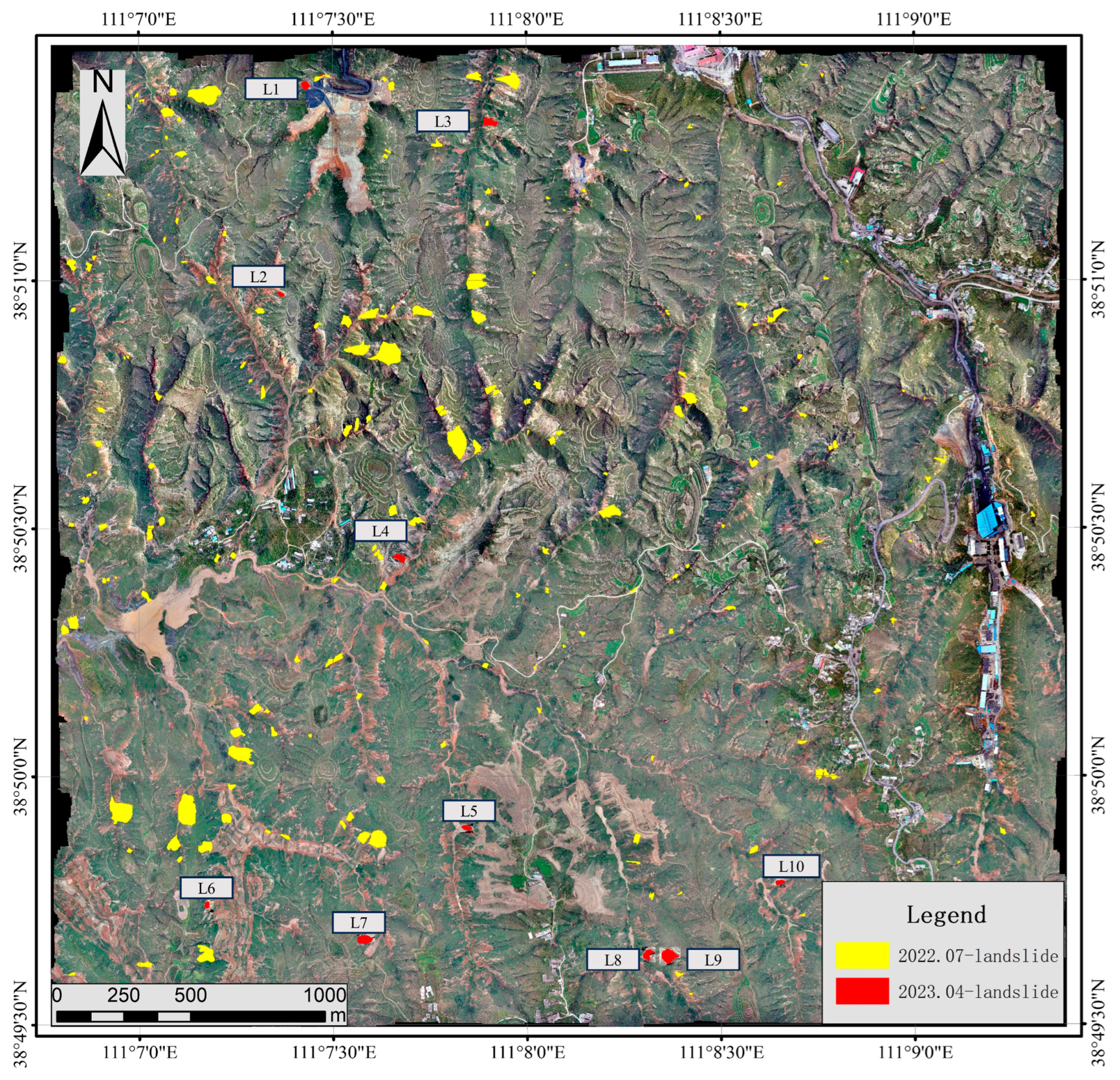
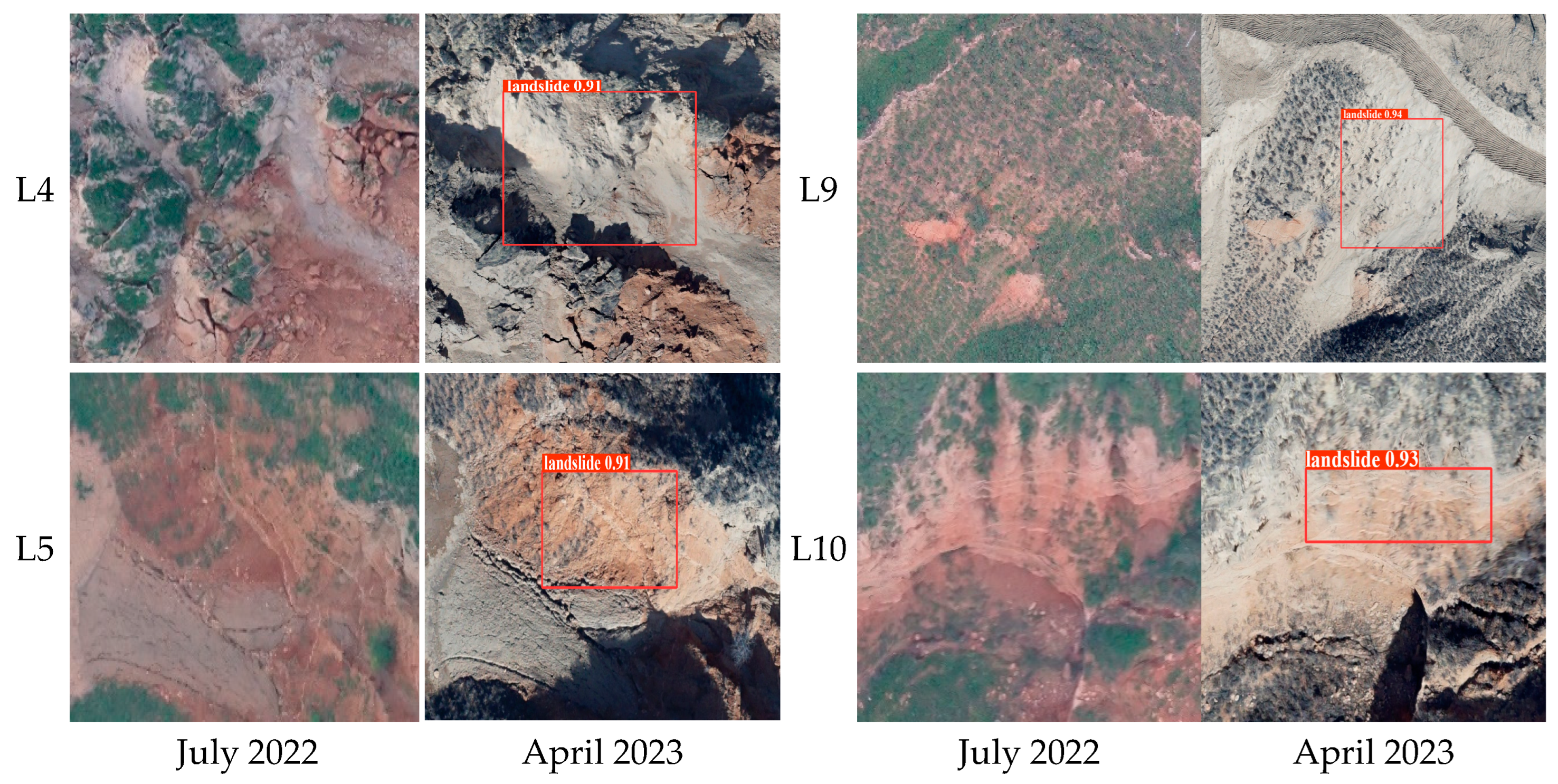
- We use the model in this paper to detect landslides in multi-period UAV images of mining areas, and successfully realize the monitoring of landslide changes in mining areas. Figure 13 shows the change of landslide during July 2022–April 2023, but the time span of the two images is short and has certain limitations. In the follow-up study, the interval time of the image can be appropriately increased to obtain a clearer change of the landslide in the mining area.
6. Conclusions
- We use the UAV images of mining area to construct a landslide data set in the mining area and use LabelImg to label the corresponding landslide area on the data set. By reconstructing the structure of YOLOv8, CBAM is embedded into the YOLOv8 model, which effectively improves the landslide detection performance of the model in UAV images.
- The feasibility of this model for landslide detection on UAV large-scale images in mining areas is verified. The area of the study area is 13.88 square kilometers. A total of 208 landslides were detected through the model in this paper. Through field investigation and visual interpretation of images, there are 203 landslides in the study area, of which 189 were correctly detected and 14 were not detected. The model F1 score was 97.10%, the missed detection rate was 6.89%, and the recognition accuracy was 93.10%.
- This study solves the problem of landslide location in images and proposes an algorithm to realize landslide location. The algorithm solves the problem of coordinate information loss in the conventional model and realizes the accurate positioning of the detected landslide area under the geographic coordinate system.
- The feasibility of using the model to monitor the change of landslide in mining area is confirmed, multi-stage UAV images are obtained, and the improved model is used to identify. By comparing the identification results, the landslide changes in the mining area can be obtained in time. This capability offers valuable data support for subsequent ecological restoration efforts in the mining area.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pollock, W.; Wartman, J. Human vulnerability to landslides. GeoHealth 2020, 4, e2020GH000287. [Google Scholar] [CrossRef] [PubMed]
- Cui, Y.L.; Xu, C.; Xu, S.Y.; Xu, S.Y.; Chai, S.F.; Fu, G.; Bao, P.P. Small-scale catastrophic landslides in loess areas of China: An example of the 15 March 2019, Zaoling landslide in Shanxi Province. Landslides 2020, 17, 669–676. [Google Scholar] [CrossRef]
- Sun, T.; Sun, D.Y.; Wang, X.K.; Ma, Q.; Philippe, G.; Daisuke, N. Numerical analysis of landslide-generated debris flow on 3 July 2021 in Izu Mountain area, Shizuoka County, Japan. J. Mt. Sci. 2022, 19, 1738–1747. [Google Scholar] [CrossRef]
- Huo, C. Study on Coal Resources Distribution Features and Exploration, Exploitation Layout in Shanxi Province. Coal Geol. China 2020, 32, 159–162. [Google Scholar]
- Guo, Z.Z.; Pei, H.H.; Huang, W.X.; Yang, Q.M. Thoughts on Environmental Geological Survey of Coal Mines in Shanxi Province. Hydrogeol. Eng. Geol. 2004, 31, 101–104. [Google Scholar]
- Jiao, S.; Long, J.H.; Yu, H.L. Characteristic and classification of landslide in Shanxi coal mine area. Coal Geol. Explor. 2017, 45, 101–106. [Google Scholar]
- Shi, W.H.; Li, Y.R.; Zhang, W.W.; Liu, J.; He, S.D.; Mo, P.; Guan, F.F. The loess landslide on 15 March 2019 in Shanxi Province, China. Landslides 2020, 17, 677–686. [Google Scholar] [CrossRef]
- Huang, T.; Bai, X.F.; Zhuang, Q.F.; Xu, J.H. Research on Landslides Extraction Based on the Wenchuan Earthquake in GF-1 Remote Sensing Image. Bull. Surv. Mapp. 2018, 2, 67–71. [Google Scholar] [CrossRef]
- Ding, Y.H.; Zhang, Q.; Yang, C.S.; Wang, M.; Ding, H. Landslide identification in Jinsha River basin based on high-resolution remote sensing: Taking Wangdalong village of Batang county as an example. Bull. Surv. Mapp. 2022, 4, 51–55. [Google Scholar] [CrossRef]
- Wang, Y.H.; Li, D.H.; Ding, Y. Surface change identification of exposed slope based on UAV inclined photogrammetry. Bull. Surv. Mapp. 2023, 8, 45–50. [Google Scholar] [CrossRef]
- Cai, H.J.; Han, H.H.; Zhang, Y.L.; Wang, L.S. Convolutional Neural Network Landslide Recognition Based on Terrain Feature Fusion. J. Earth Sci. Environ. 2022, 44, 568–579. [Google Scholar] [CrossRef]
- Xin, L.B.; Han, L.; Li, L.Z. Landslide Intelligent Recognition Based on Multi-source Data Fusion. J. Earth Sci. Environ. 2023, 45, 920–928. [Google Scholar] [CrossRef]
- Han, Z.; Fang, Z.X.; Li, Y.E.; Fu, B.J. A novel Dynahead-Yolo neural network for the detection of landslides with variable proportions using remote sensing images. Front. Earth Sci. 2023, 10, 1077153. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar] [CrossRef]
- Zhang, S.F.; Chi, C.; Yao, Y.Q.; Lei, Z.; Li, S.Z. Bridging the gap between anchor-based and anchor-free detection via adaptive training sample selection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 9759–9768. [Google Scholar] [CrossRef]
- Li, X.; Wang, W.H.; Hu, X.L.; Li, J.; Tang, J.H.; Yang, J. Generalized Focal Loss V2: Learning Reliable Localization Quality Estimation for Dense Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021. [Google Scholar] [CrossRef]
- Tian, Z.; Shen, C.; Chen, H.; He, T. FCOS: Fully Convolutional One-Stage Object Detection. arXiv 2019, arXiv:1904.01355. [Google Scholar] [CrossRef]
- Fu, J.; Liu, J.; Jiang, J.; Li, Y.; Bao, Y.J.; Lu, H.Q. Scene Segmentation with Dual Relation-Aware Attention Network. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 2547–2560. [Google Scholar] [CrossRef]
- Peng, Y.; He, X.; Zhao, J. Object-Part Attention Driven Discriminative Localization for Fine-grained Image Classification. IEEE Trans. Image Process. 2017, 27, 1487–1500. [Google Scholar] [CrossRef] [PubMed]
- Ning, X.; Gong, K.; Li, W.J.; Zhang, L.P. JWSAA: Joint weak saliency and attention aware for person re-identification. Neurocomputing 2021, 453, 801–811. [Google Scholar] [CrossRef]
- Basiri, M.E.; Nemati, S.; Abdar, M.; Cambria, E.; Acharya, U. ABCDM: An attention-based bidirectional CNN-RNN deep model for sentiment analysis. Future Gener. Comput. Syst. 2021, 115, 279–294. [Google Scholar] [CrossRef]
- Galassi, A.; Lippi, M.; Torroni, P. Attention in Natural Language Processing. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4291–4308. [Google Scholar] [CrossRef]
- Cheng, L.B.; Li, J.; Duan, P.; Wang, M.G. A small attentional YOLO model for landslide detection from satellite remote sensing images. Landslides 2021, 18, 2751–2765. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| D2000 | D-CAM2000 | ||
|---|---|---|---|
| Take-off weight | 2.8 kg | Camera model | SONY a6000 |
| Standard load | 200 g | Efficiency pixel | 2430 million |
| Endurance time | 74 min | Sensor size | 23.5 × 15.6 mm (aps-c) |
| Measurement radius | 20 km | Camera lens | 25 mm |
| Time | Format | Area (km2) |
|---|---|---|
| 22 July 2022 | TIF | 13.87 |
| 22 August 2022 | TIF | 13.86 |
| 22 September 2022 | TIF | 13.90 |
| 22 October 2022 | TIF | 13.75 |
| 22 November 2022 | TIF | 13.87 |
| 22 December 2022 | TIF | 13.88 |
| 23 January 2023 | TIF | 13.70 |
| 23 February 2023 | TIF | 13.82 |
| 23 March 2023 | TIF | 13.88 |
| 23 April 2023 | TIF | 13.85 |
| Model | P/% | R/% | F1/% | mAP@0.5/% |
|---|---|---|---|---|
| YOLOv5 | 89.3 | 87.3 | 88.3 | 92.5 |
| YOLOv8 | 90.4 | 87.5 | 88.9 | 93.4 |
| improved model | 98.3 | 96.0 | 97.1 | 97.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lian, X.; Li, Y.; Wang, X.; Shi, L.; Xue, C. Research on Identification and Location of Mining Landslide in Mining Area Based on Improved YOLO Algorithm. Drones 2024, 8, 150. https://doi.org/10.3390/drones8040150
Lian X, Li Y, Wang X, Shi L, Xue C. Research on Identification and Location of Mining Landslide in Mining Area Based on Improved YOLO Algorithm. Drones. 2024; 8(4):150. https://doi.org/10.3390/drones8040150
Chicago/Turabian StyleLian, Xugang, Yu Li, Xiaobing Wang, Lifan Shi, and Changhao Xue. 2024. "Research on Identification and Location of Mining Landslide in Mining Area Based on Improved YOLO Algorithm" Drones 8, no. 4: 150. https://doi.org/10.3390/drones8040150
APA StyleLian, X., Li, Y., Wang, X., Shi, L., & Xue, C. (2024). Research on Identification and Location of Mining Landslide in Mining Area Based on Improved YOLO Algorithm. Drones, 8(4), 150. https://doi.org/10.3390/drones8040150