
Path Planning of Multiple UAVs for the Early Detection of Wildfires in the National Park of Kotychi and Strofylia Wetlands




Abstract
:1. Introduction
2. Materials and Methods
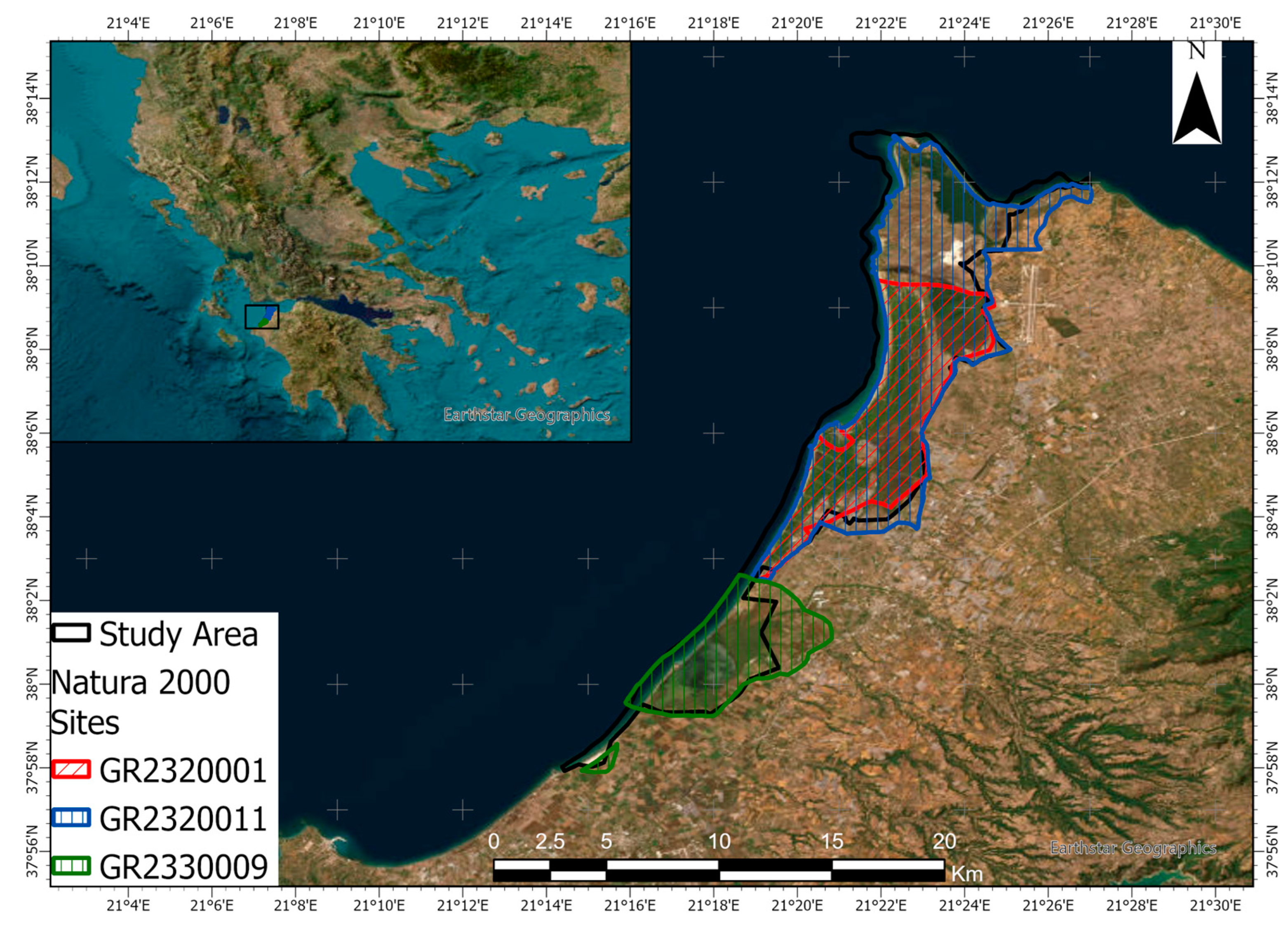
2.1. Study Area
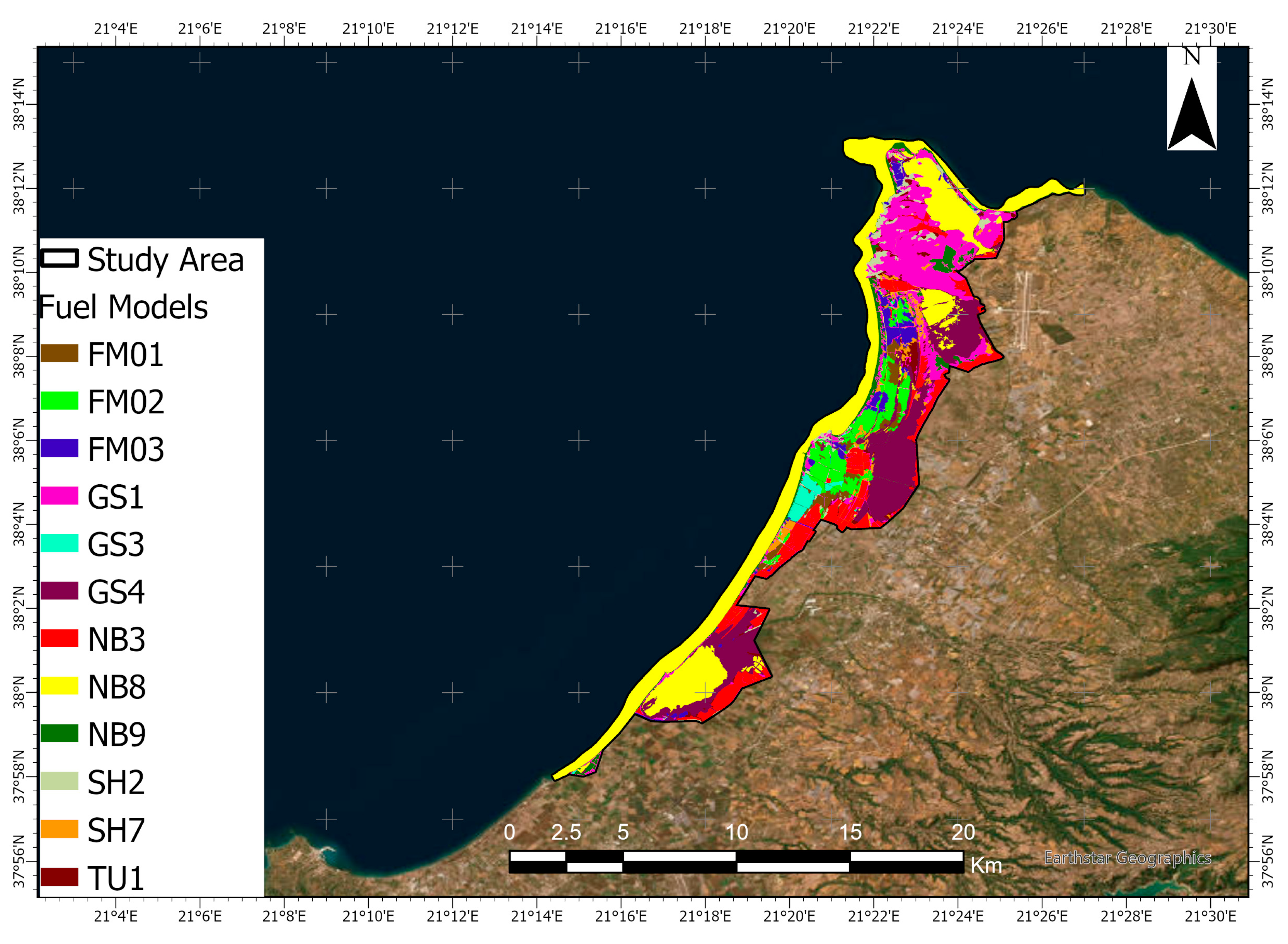
2.2. Data Sources and Fuel Type Identification
2.3. Fire Danger Index Calculation
2.4. The Fire Detection of the National Park of Kotychi and Strofylia Wetlands Using UAVs Equipped with Vision Cameras
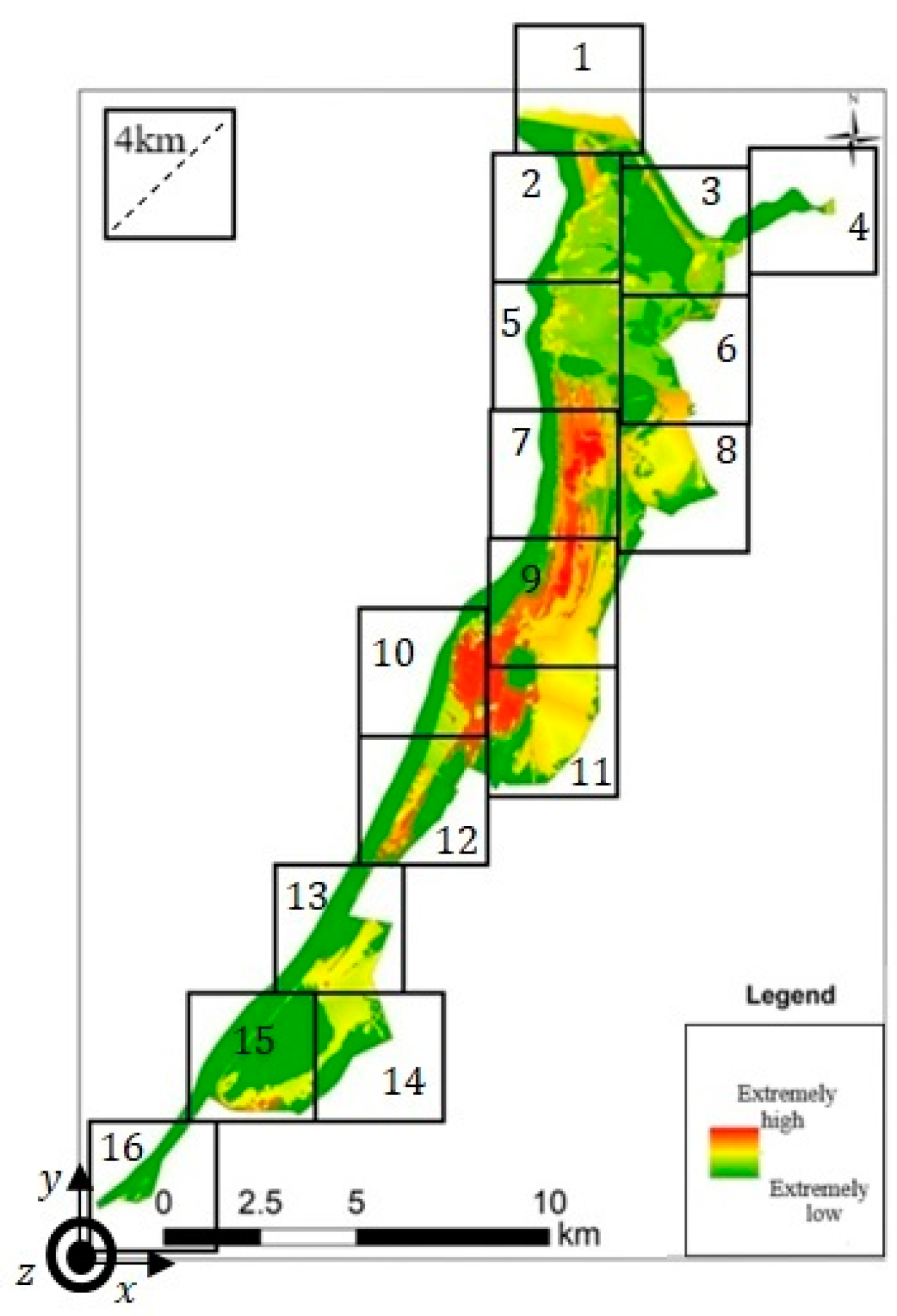
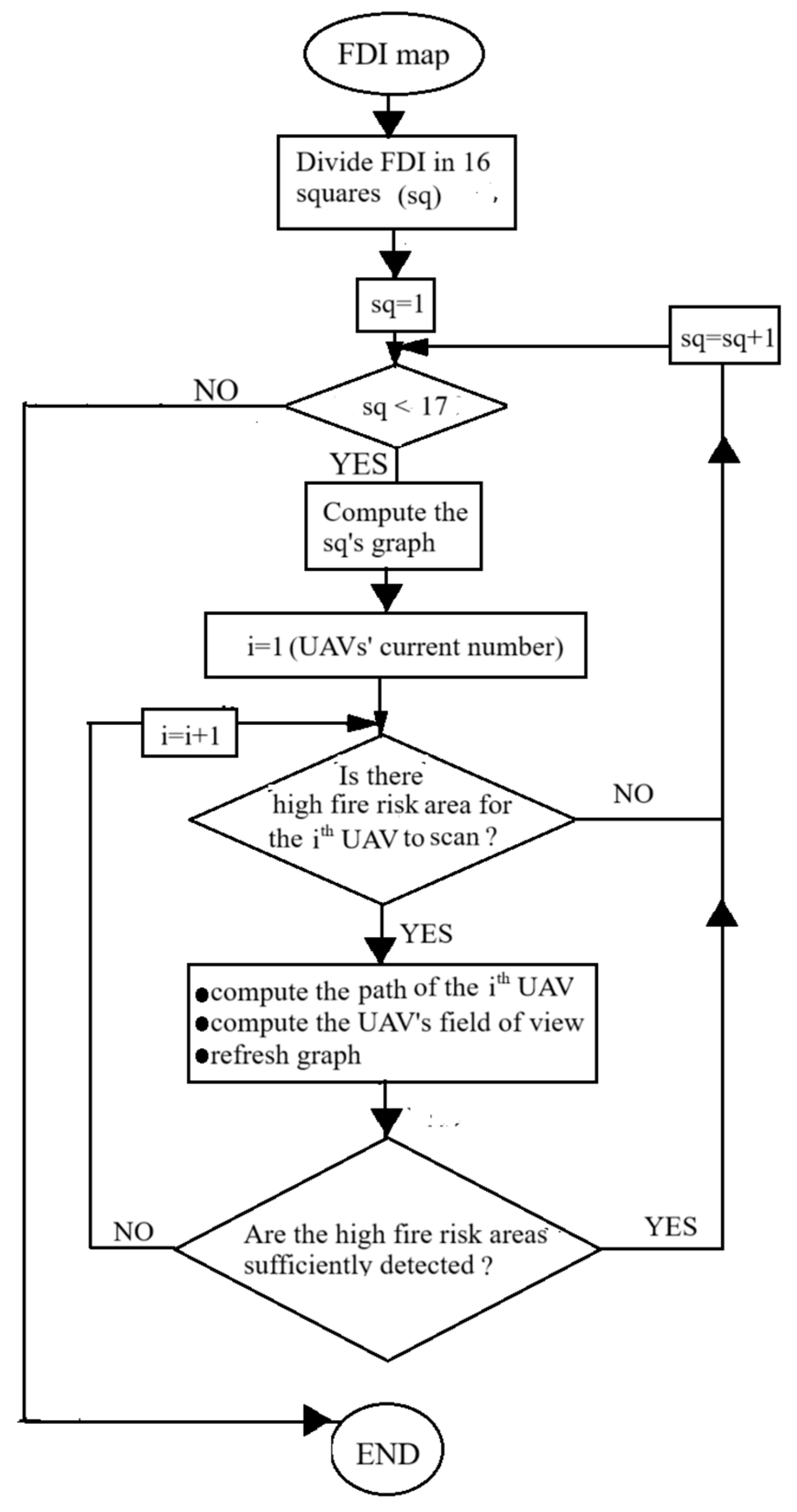
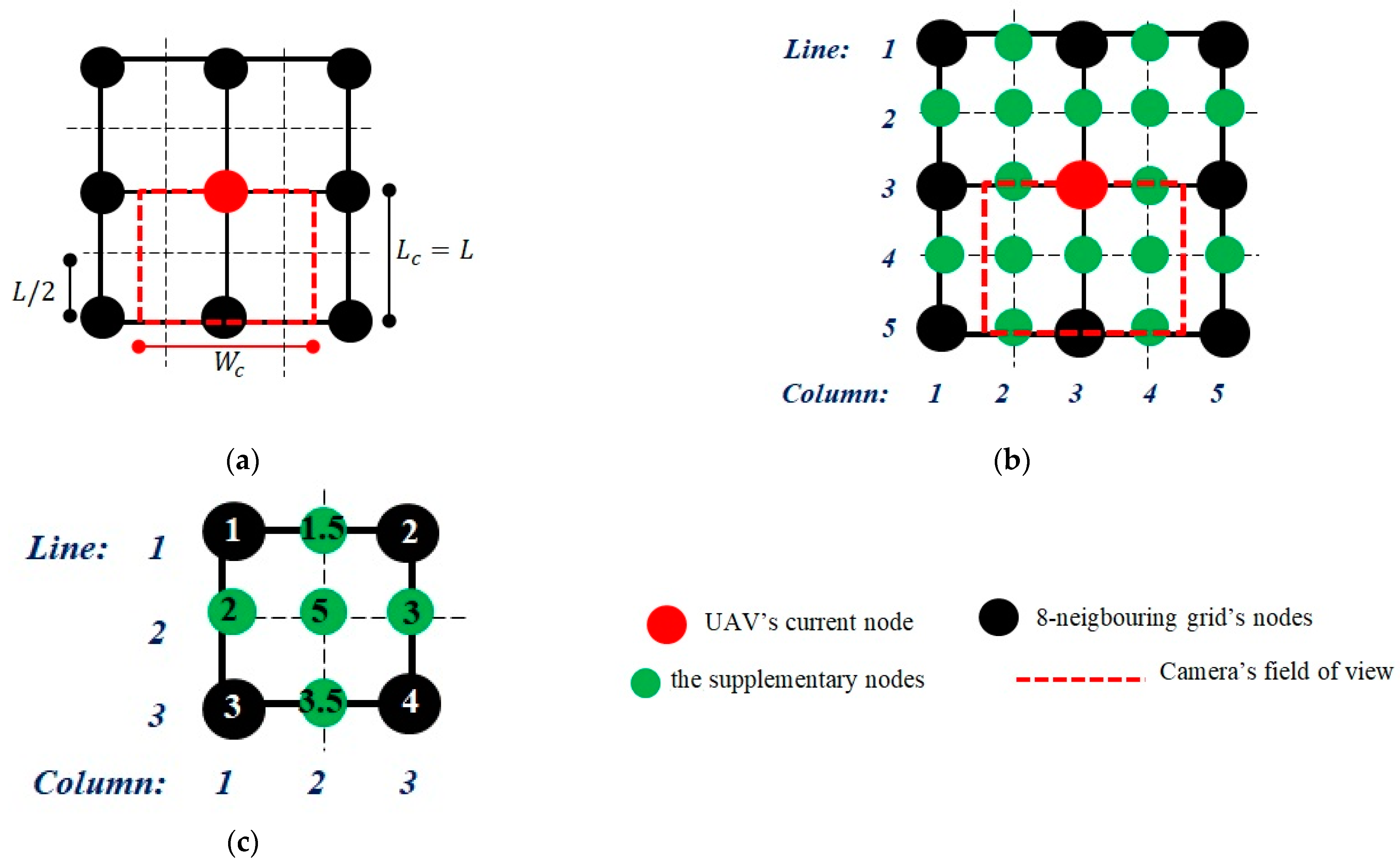
2.4.1. Dividing the Strofylia Forest Using the UAV’s Technical Properties
2.4.2. Building the UAVs’ Graph Based on the FDI Map and the Camera’s Field of View
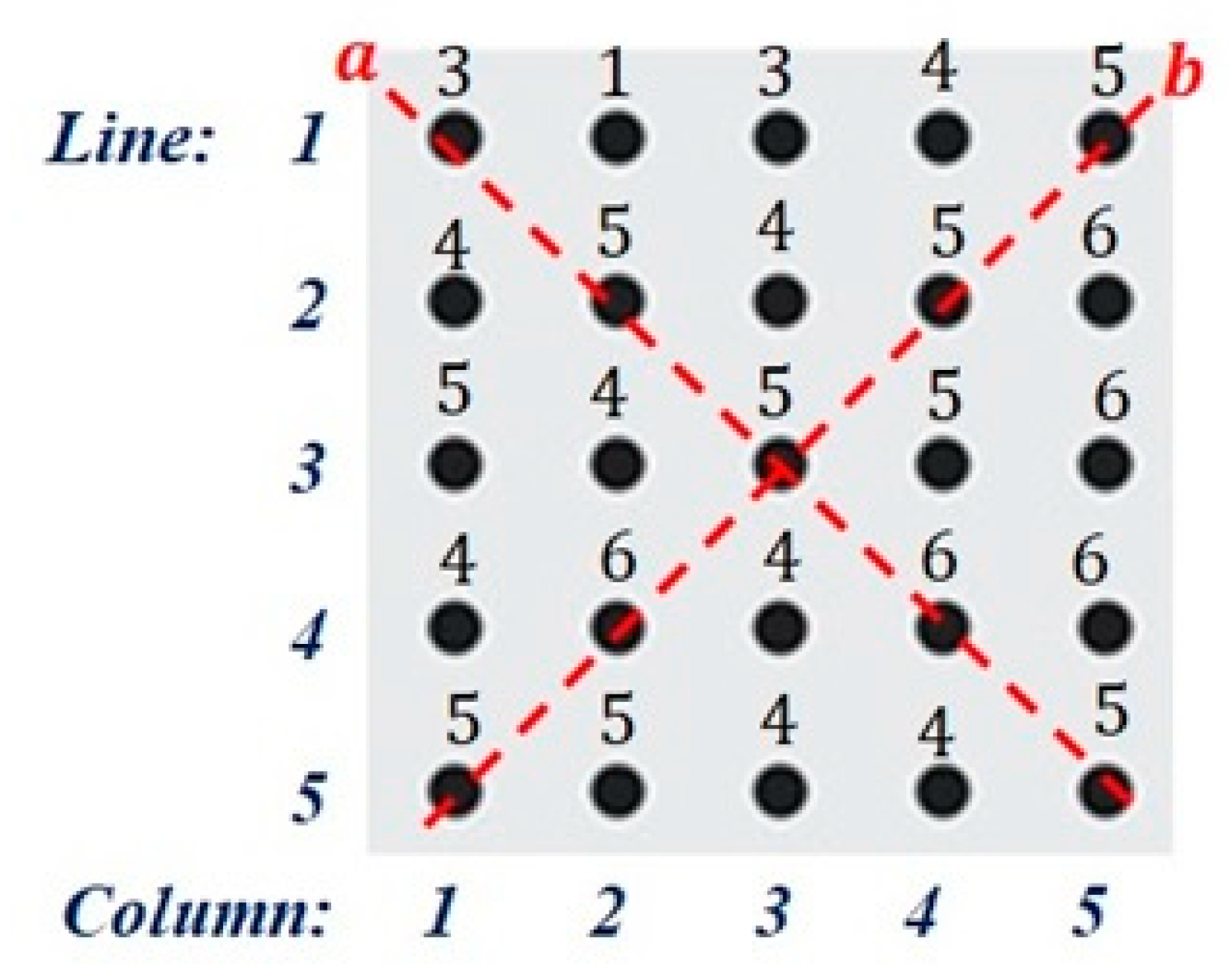
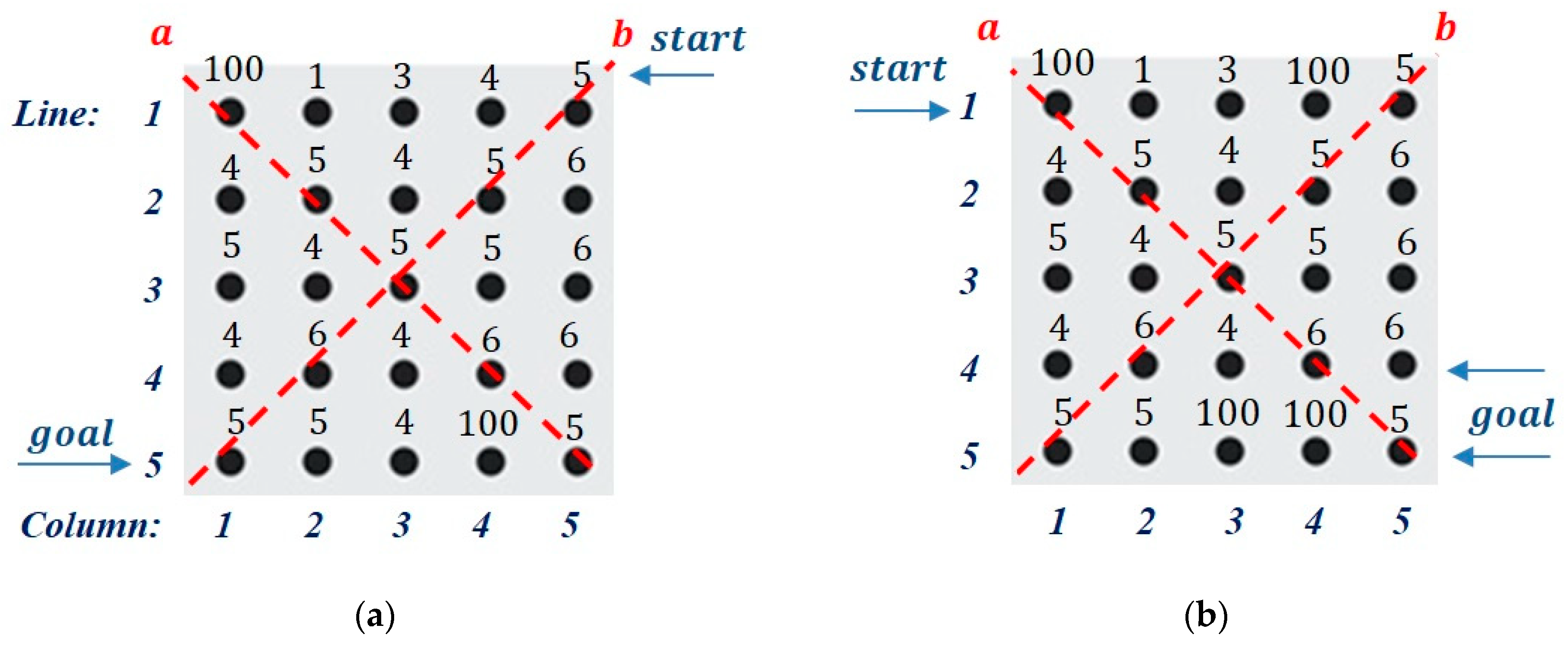
2.4.3. Collision-Free Path Planning for Multiple UAVs: Two Heuristic Methods for Start and Goal Selection
- The search for the start and goal is conducted line by line, beginning from line 1 for the start node and from line n for the goal.
- The search starts from the corresponding nodes on the diagonal that were not selected for the path of the (i – 1)th UAV.
- The first nodes with w ≤ 4 are selected as the start and goal nodes.
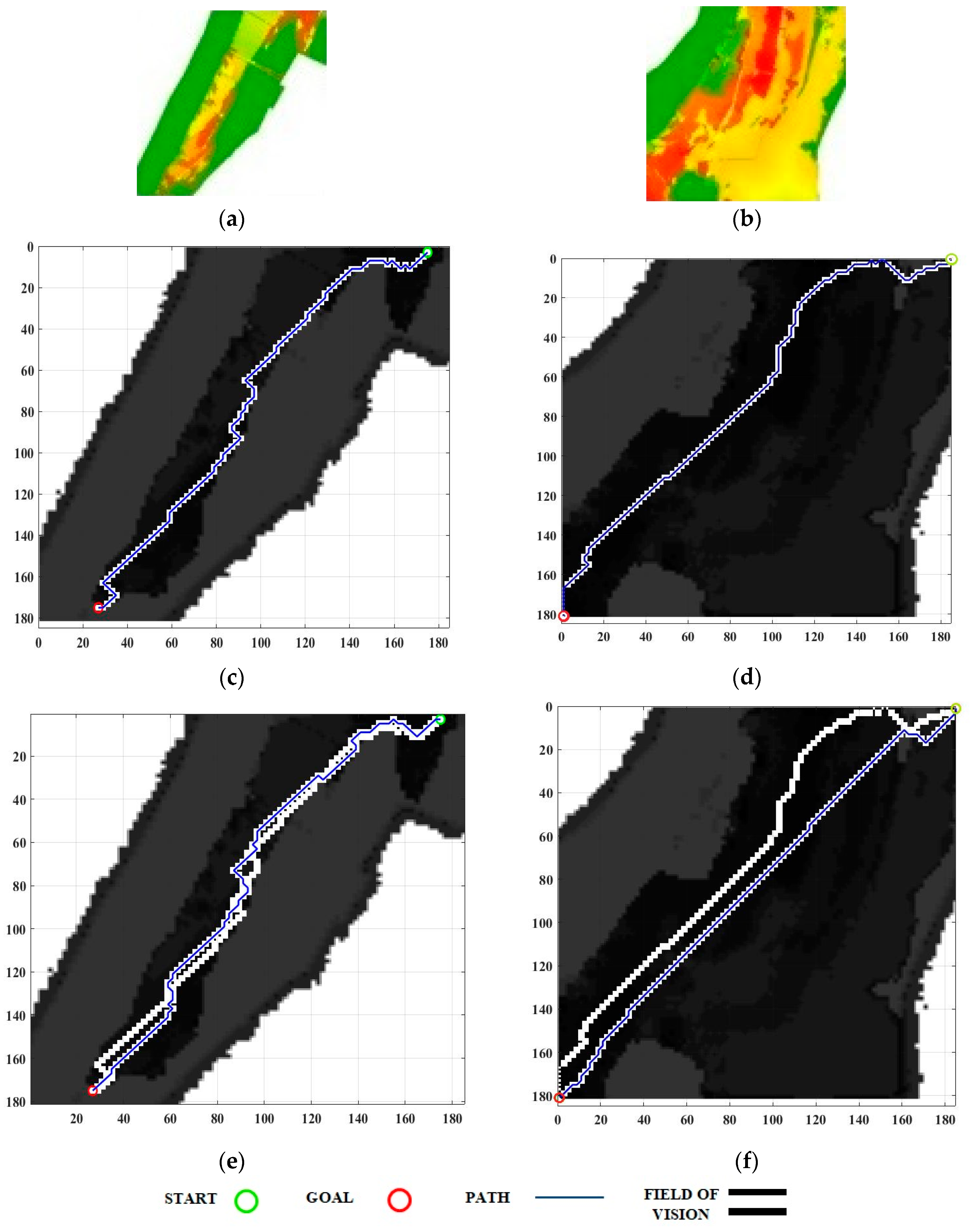
3. Results
4. Discussion
5. Conclusions—Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- 2023 Greece Wildfires. Available online: https://en.wikipedia.org/wiki/2023_Greece_wildfires (accessed on 8 November 2024).
- Alkhatib, A.A.A. A review on forest fire detection techniques. Int. J. Distrib. Sens. Netw. 2014, 10, 597368. [Google Scholar] [CrossRef]
- Yandouzi, M.; Grari, M.; Idrissi, I.; Moussaoui, O.; Azizi, M.; Ghoumid, K.; Elmiad, A.K. Review on forest fires detection and prediction using deep learning and drones. J. Theor. Appl. Inf. Technol. 2022, 100, 4565–4576. [Google Scholar]
- Kolluru, V.K.; Chintakunta, A.N.; Nuthakki, Y.; Koganti, S. Advancements in Wildfire Prediction and Detection: A Systematic Review. Int. J. Multidiscip. Res. 2022, 4, 1–30. [Google Scholar]
- Bailon-Ruiz, R.; Lacroix, S. Wildfire remote sensing with UAVs: A Review from The Autonomy Point of View. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems, ICUAS, Athens, Greece, 1–4 September 2020; pp. 412–420. [Google Scholar]
- Moulianitis, V.C.; Thanellas, G.; Xanthopoulos, N.; Aspragathos, N.A. Evaluation of UAV Based Schemes for Forest Fire Monitoring. In Advances in Service and Industrial Robotics Proceedings of the 27th International Conference on Robotics in Alpe-Adria Danube Region, RAAD, Patras, Greece, 6–8 June 2018; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 143–150. [Google Scholar]
- Simoes, D.; Rodrigues, A.; Reis, A.B.; Sargento, S. Forest Fire Monitoring Through a Network of Aerial Drones and Sensors. In Proceedings of the 2020 IEEE International Conference on Pervasive Computing and Communications Workshops, PerCom Workshops, Austin, TX, USA, 23 March 2020; pp. 1–6. [Google Scholar]
- Sharma, A.; Singh, P.K. UAV-based framework for effective data analysis of forest fire detection using 5G networks: An effective approach towards smart cities solutions. Int. J. Commun. Syst. 2021, e4826. [Google Scholar] [CrossRef]
- Sungheetha, A.; Sharma, R. Real time monitoring and fire detection using internet of things and cloud based drones. J. Soft Comput. Paradig. 2020, 2, 168–174. [Google Scholar] [CrossRef]
- Yandouzi, M.; Grari, M.; Berrahal, M.; Idrissi, I.; Moussaoui, O.; Azizi, M.; Ghoumid, K.; Elmiad, A.K. Investigation of combining deep learning object recognition with drones for forest fire detection and monitoring. Int. J. Adv. Comput. Sci. Appl. 2023, 14, 377–384. [Google Scholar] [CrossRef]
- Georgiev, G.D.; Hristov, G.; Zahariev, P.; Kinaneva, D. Forest Monitoring System for Early Fire Detection Based on Convolutional Neural Network and Uav Imagery. In Proceedings of the 2020 28th National Conference with International Participation, TELECOM, Sofia, Bulgaria, 29–30 October 2020; pp. 57–60. [Google Scholar]
- Macrina, G.; Di Puglia Pugliese, L.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Christodoulou, C.; Kolios, P. Optimized Tour Planning for Drone-Based Urban Traffic Monitoring. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference, VTC2020-Spring, Antwerp, Belgium, 25–28 May 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Islam, S.; Razi, A. A Path Planning Algorithm for Collective Monitoring Using Autonomous Drones. In Proceedings of the 2019 53rd Annual Conference on Information Sciences and Systems, CISS, Baltimore, MD, USA, 20–22 March 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Mesquita, R.; Gaspar, P.D. A Novel Path Planning Optimization Algorithm Based on Particle Swarm Optimization for UAVs for Bird Monitoring and Repelling. Processes 2022, 10, 62. [Google Scholar] [CrossRef]
- Melhim LK, B.; Jemmali, M.; Boulila, W.; Alazab, M.; Rani, S.; Campbell, H.; Amdouni, H. Leveraging Drone-Assisted Surveillance for Effective Forest Conservation: A Case Study in Australia’s Daintree Rainforest. IEEE Internet Things J. 2024, 11, 31167–31179. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, F.; Li, M. Probabilistic Path Planning for UAVs in Forest Fire Monitoring: Enhancing Patrol Efficiency through Risk Assessment. Fire 2024, 7, 254. [Google Scholar] [CrossRef]
- Dimopoulos, V.; Tourkolias, C.; Mirasgedis, S. Valuing Natural Ecosystems: The Case of National Park Kotychi-Strofilia in Peloponnese, Greece. IOP Conf. Series Earth Environ. Sci. 2022, 2022, 1123. [Google Scholar] [CrossRef]
- Nastos, P.T.; Dalezios, N.R.; Faraslis, I.N.; Mitrakopoulos, K.; Blanta, A.; Spiliotopoulos, M.; Sakellariou, S.; Sidiropoulos, P.; Tarquis, A.M. Review article: Risk management framework of environmental hazards and extremes in Mediterranean ecosystems. Nat. Hazards Earth Syst. Sci. 2021, 21, 1935–1954. [Google Scholar] [CrossRef]
- Xofis, P.; Tsiourlis, G.; Konstantinidis, P. A Fire Danger Index for the early detection of areas vulnerable to wildfires in the Eastern Mediterranean region. Euro-Mediterranean J. Environ. Integr. 2020, 5, 1–13. [Google Scholar] [CrossRef]
- Aspragathos, N.; Dogkas, E.; Koutmos, P.; Paterakis, G.; Souflas, K.; Thanellas, G.; Moulianitis, V.C. THEASIS System for Early Detection of Wildfires in Greece: Preliminary Results from its Laboratory and Small Scale Tests. In Proceedings of the 2019 29th Annual Conference of the European Association for Education in Electrical and Information Engineering, EAEEIE, Ruse, Bulgaria, 4–6 September 2019; pp. 1–6. [Google Scholar]
- Aggarwal; Shubhani; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Trimble Inc. eCognition Developer Reference Book; Trimble Inc.: Munich, Germany, 2014. [Google Scholar]
- Scott, J.H.; Burgan, R.E. Standard Fire Behaviour Fuel Models: A Comprehensive Set for Use with Rothermel’s Surface Fire Spread Model. General Technical Report RMRS-GTR-153; Rocky Mountain Research Station: Fort Collins, CO, USA, 2005; p. 72. [Google Scholar]
- Palaiologou, P. Design of Fire Behaviour Prediction and Assessment with the Use of Geoinformation. Ph.D. Thesis, University of the Aegean, Lesbos, Greece, 2015. [Google Scholar]
- Xofis, P.; Konstantinidis, P.; Papadopoulos, I.; Tsiourlis, G. Integrating Remote Sensing Methods and Fire Simulation Models to Estimate Fire Hazard in a South-East Mediterranean Protected Area. Fire 2020, 3, 31. [Google Scholar] [CrossRef]
- Finney, M.A. An overview of FlamMap Fire Modeling Capabilities; USDA Forest Service Proceedings RMRS-P-41; Rocky Mountain Research Station: Fort Collins, CO, USA, 2006. [Google Scholar]
- Rothermel, R.C. A Mathematical Model for Predicting Fire Spread in Wildland Fuels. Research Paper INT-115; Department of Agriculture, Forest Service, Intermountain Forest and Range Experiment Station: Ogden, UT, USA, 1972; p. 40. [Google Scholar]
- Catry, F.X.; Rego, F.C.; Bacao, F.; Moreira, F. Modeling and mapping wildfire ignition risk in Portugal. Int. J. Wildland Fire 2009, 18, 921–931. [Google Scholar] [CrossRef]
- Qin, H.; Shao, S.; Wang, T.; Yu, X.; Jiang, Y.; Cao, Z. Review of Autonomous Path Planning Algorithms for Mobile Robots. Drones 2023, 7, 211. [Google Scholar] [CrossRef]
- Liu; Guo, J.; Mason, P.J. Image Processing and GIS for Remote Sensing: Techniques and Applications; John and Wiley and Sons: Hoboken, NJ, USA, 2024. [Google Scholar]
- Barnhart, I.H.; Lancaster, S.; Goodin, D.; Spotanski, J.; Dille, J.A. Use of open-source object detection algorithms to detect Palmer amaranth (Amaranthus palmeri) in soybean. Weed Sci. 2022, 70, 648–662. [Google Scholar] [CrossRef]
- Tolika, K.; Maheras, P.; Tegoulias, I. Extreme temperatures in Greece during 2007: Could this be a “return to the future”? Geophys. Res. Lett. 2009, 36, 10. [Google Scholar] [CrossRef]
- Founda, D.; Giannakopoulos, C. The exceptionally hot summer of 2007 in Athens, Greece—A typical summer in the future climate? Glob. Planet. Chang. 2009, 67, 227–236. [Google Scholar] [CrossRef]
- Kontoes, C.; Keramitsoglou, I.; Papoutsis, I.; Sifakis, N.I.; Xofis, P. National scale operational mapping of burnt areas as a tool for the better understanding of contemporary wildfire patterns and regimes. Sensors 2013, 13, 11146–11166. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FM Code | Description | Corresponding Landcover Type(s) | Source |
|---|---|---|---|
| FM01 | Pine forests with shrub understory at more than 50% of the area | Pure or mixed stands with P. pinea and P. halepensis | Palaiologou [25] |
| FM02 | Pine forests with shrub understory at less than 50% of the area | Pure or mixed stands with P. pinea and P. halepensis | Palaiologou [25] |
| FM03 | Pine forests with occasional shrub understory | Pure or mixed stands with P. pinea and P. halepensis | Palaiologou [25] |
| GS1 | Low Load, Dry Climate Grass–Shrub | Grasslands | Scott and Burgan [24] |
| GS3 | Moderate Load, Humid Climate Grass–Shrub (Dynamic) | Recently burned areas | Scott and Burgan [24] |
| GS4 | High Load, Humid Climate Grass–Shrub (Dynamic) | Wet Meadows | Scott and Burgan [24] |
| SH2 | Moderate Load Dry Climate Shrub | J. phoenicea shrublands (moderate density) | Scott and Burgan [24] |
| SH7 | Very High Load, Dry Climate Shrub | J. phoenicea shrublands (high density), Artificially regenerated stands of P. halepensis and P. pinea not exceeding 8 m height | Scott and Burgan [24] |
| TU1 | Low Load Dry Climate Timber–Grass–Shrub (Dynamic) | Q. aegilops stands | Scott and Burgan [24] |
| NB3 | Agricultural areas | Agricultural areas | Scott and Burgan [24] |
| NB8 | Open water | Sea and inland water | Scott and Burgan [24] |
| NB9 | Bare ground | Bare ground | Scott and Burgan [24] |
| Number of the Square Area | Percentage of the Square Area That Is Covered by Extremely High and High Fire Danger Risk Regions | Percentage of the Extremely High and High Fire Risk Regions That Are Scanned Using a Single UAV | Maximum Number of UAVs That Can Scan Simultaneously the Region | ||
|---|---|---|---|---|---|
| w ≤ 2 | w ≤ 4 | w ≤ 2 | w ≤ 4 | ||
| 1 | 0% | 10% | - | 70% | 1 |
| 2 | 0% | <0.1% | - | 100% | 1 |
| 3 | 0% | <0.1% | - | 100% | 1 |
| 4 | 0% | 0% | NO SCANNING IS NEEDED | ||
| 5 | 0% | 3.5% | 0% | 0% | 1 |
| 6 | 0% | 0.7% | 0% | 0% | 1 |
| 7 | 7.5% | 24.1% | 14% | 9% | 6 |
| 8 | 0% | 0.4% | - | 100% | 1 |
| 9 | 5.3% | 23% | 13% | 8% | 8 |
| 10 | 9.4% | 15.5% | 12% | 10% | 4 |
| 11 | 6.7% | 11.6% | 20% | 16% | 4 |
| 12 | 0.5% | 2.5% | 99% | 95% | 1 |
| 13 | 0% | <0.1% | - | 100% | 1 |
| 14 | 0% | <0.1% | - | 100% | 1 |
| 15 | <0.1% | 1.5% | 100% | 100% | 1 |
| 16 | 0% | 0% | NO SCANNING IS NEEDED | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kritikou, G.; Xofis, P.; Souflas, K.; Moulianitis, V. Path Planning of Multiple UAVs for the Early Detection of Wildfires in the National Park of Kotychi and Strofylia Wetlands. Fire 2024, 7, 444. https://doi.org/10.3390/fire7120444
Kritikou G, Xofis P, Souflas K, Moulianitis V. Path Planning of Multiple UAVs for the Early Detection of Wildfires in the National Park of Kotychi and Strofylia Wetlands. Fire. 2024; 7(12):444. https://doi.org/10.3390/fire7120444
Chicago/Turabian StyleKritikou, Georgia, Panteleimon Xofis, Konstantinos Souflas, and Vassilis Moulianitis. 2024. "Path Planning of Multiple UAVs for the Early Detection of Wildfires in the National Park of Kotychi and Strofylia Wetlands" Fire 7, no. 12: 444. https://doi.org/10.3390/fire7120444
APA StyleKritikou, G., Xofis, P., Souflas, K., & Moulianitis, V. (2024). Path Planning of Multiple UAVs for the Early Detection of Wildfires in the National Park of Kotychi and Strofylia Wetlands. Fire, 7(12), 444. https://doi.org/10.3390/fire7120444