1. Introduction
Exposure to seated whole-body vibration (WBV) from heavy equipment may contribute to adverse effects on human health, including lower-back pain, sciatica, and other injuries [
1,
2,
3]. WBV is typically defined as being between 0.5 Hz and 80 Hz [
4], though the perception of these vibrations depends on the magnitude of acceleration as well as the axis it acts along [
5]. Morioka et al. found that the maximum sensitivity to WBV in the vertical axis occurs between 5 and 10 Hz [
5]. To this end, slow-moving vehicles are of concern as their motion generally results in lower-frequency excitation forces. Low-frequency vibrations are difficult to attenuate using traditional passive isolators due to the mechanical limitations of springs [
6]. Below the cut-off frequency, traditional linear isolators amplify vibrations rather than attenuate them, potentially worsening the effects of WBV for the operator.
Several seat designs have been proposed within the literature to combat the limitations of passive linear isolators. Active and semi-active seats use a control scheme and electronic feedback to actively attenuate vibrations transmitted to the operator. Several studies have shown that such systems are capable of isolating low-frequency vibrations much better than traditional passive systems [
7,
8,
9,
10]. However, active and semi-active systems suffer from increased complexity and cost when compared to simpler passive systems. Commercial products using this technology such as the John Deere Active Seat [
11] and Bose Ride System [
12] are designed to replace the entire seat in modern heavy equipment. This adds additional cost and limits the ability of the seat to be universally mounted into any kind of equipment.
An alternative isolator technology shown to attenuate WBV makes use of the principle of quasi-zero stiffness (QZS). Le et al. [
13] designed and validated a seat suspension that incorporates negative stiffness into the main seat suspension. Within this work, the entire seat is considered as a single-degree-of-freedom (SDOF) system, where the seat and cushion are simply considered to be rigid parts. Their research confirms that through careful tuning of the SDOF negative stiffness elements, the seat can have a more desirable dynamic response compared to without these elements in place. These results are derived through experimental investigations for various values of nonlinear stiffness.
Wang et al. [
14] modeled an adaptive QZS system as a three-degree-of-freedom system where the seat, vehicle body, and vehicle wheel make up the three degrees. The paper focuses on the impulse response of the system rather than the entire frequency response. Through simulations, the results show that a passive QZS seat suspension can decrease peak acceleration, improve rider comfort, and decrease attenuation time when compared to a linear system. When active control is applied to the QZS system, the acceleration of the human body is decreased to zero, rider comfort is further improved, and the seat stroke remains within its allowed range when compared to the simpler passive case.
Guo et al. [
15] performed an in-depth review of High-Static Low-Dynamic (HSLD) isolators and then used a double-diamond structure to develop a conceptual design of a seat cushion that incorporates QZS elements. The design consists of many small isolators placed in parallel within the cushion and is evaluated using analytical models and an Automated Dynamic Analysis of Mechanical Systems (ADAMS) software simulation. The results show that the cushion is expected to perform significantly better than a linear isolator, decreasing the natural frequency of the cushion from 13.78 Hz to 3.2 Hz.
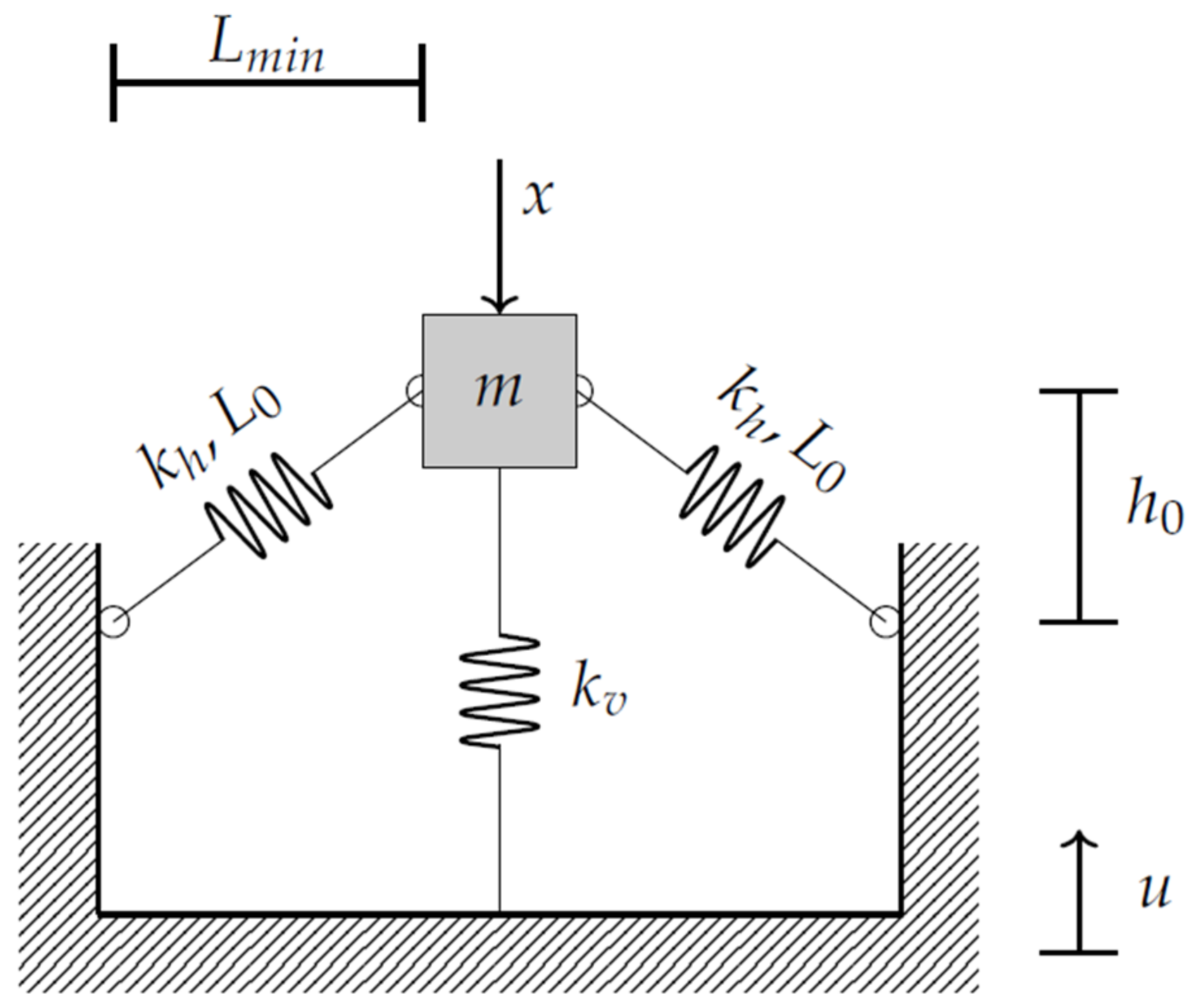
Unlike most previous studies, the current paper proposes a low-profile isolator designed to replace an existing heavy-equipment seat cushion rather than the entire seat. Similar to the concept of Guo et al., the device uses the principle of HSLD stiffness, which can be tuned optimally to achieve the QZS condition. However, unlike the conceptual cushion by Guo et al. [
15], the design presented here uses one large QZS element rather than many small elements in parallel. The present study will show that this poses several advantages, particularly in the tunability of the device to compensate for different operator masses. In addition, a prototype of the design is developed and tested. The novel cushion aims to leave the existing seat suspension untouched and simply replaces the existing seat cushion with a new one. This is particularly beneficial for maintaining a low device cost, while providing new vibration attenuation options for a wide range of industries. The low profile aims to maintain the form factor of existing seat cushions within many heavy-equipment vehicles. For applications such as underground mining, an isolating cushion is particularly useful, since vertical size limitations of the machines do not allow for large complex vehicles or seat suspensions. In these applications, replacement of the existing seat cushion is the only viable option for eliminating WBV.
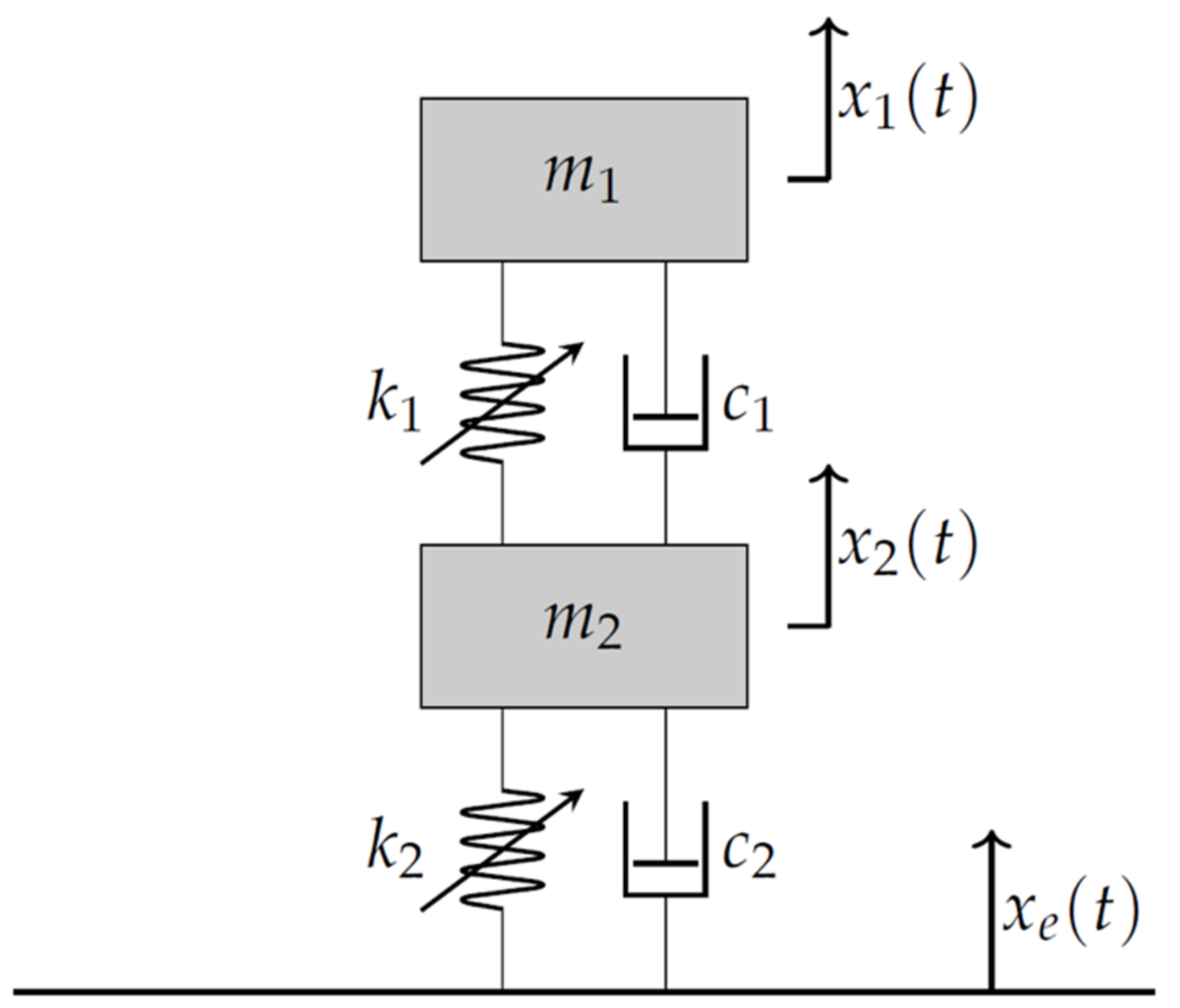
The main focus of the proposed design is to isolate low-frequency vibrations that the existing seat suspensions are not able to attenuate. When used in conjunction with the existing suspension, the aim of the cushion is to increase the attenuation bandwidth. The design was evaluated as a standalone SDOF system, as well as a two-degree-of-freedom (2DOF) system when incorporated into a tractor seat. The tractor seat used as the frame of reference was the T300 Universal Tractor Seat developed by Darby Manufacturing. In each case, the dynamic performance was evaluated based on the ability of the device to (1) reduce the resonant frequency and increase the attenuation zone when compared to the linear system, (2) decrease the magnitude of the resonant peak, and (3) isolate high-frequency mechanical vibrations, evaluated using the rate of decay of the transmissibility plot. The American Society of Agricultural and Biological Engineers (ASABE) guideline for agricultural equipment operator seats was used as a frame of reference, which suggests that the lower limit for a typical passive seat suspension would have a natural frequency of around 1.2 Hz for steel or rubber springs, and 0.8 Hz for air springs [
6]. Considering that the attenuation zone of a linear system begins at
√2ωn, where
ωn is the natural frequency of the system. This guideline would correlate to a cut-off frequency of 1.70 Hz for steel springs and 1.13 Hz for air springs.
QZS systems have been shown in the past to be sensitive to parameters such as spring stiffness, system geometry, and the mass placed on top of it [
16,
17,
18]. For the application of a heavy-equipment seat cushion, this is of importance since the mass of an operator can vary substantially. For this reason, the ability of the device to accommodate a variety of masses is investigated.
4. Discussion
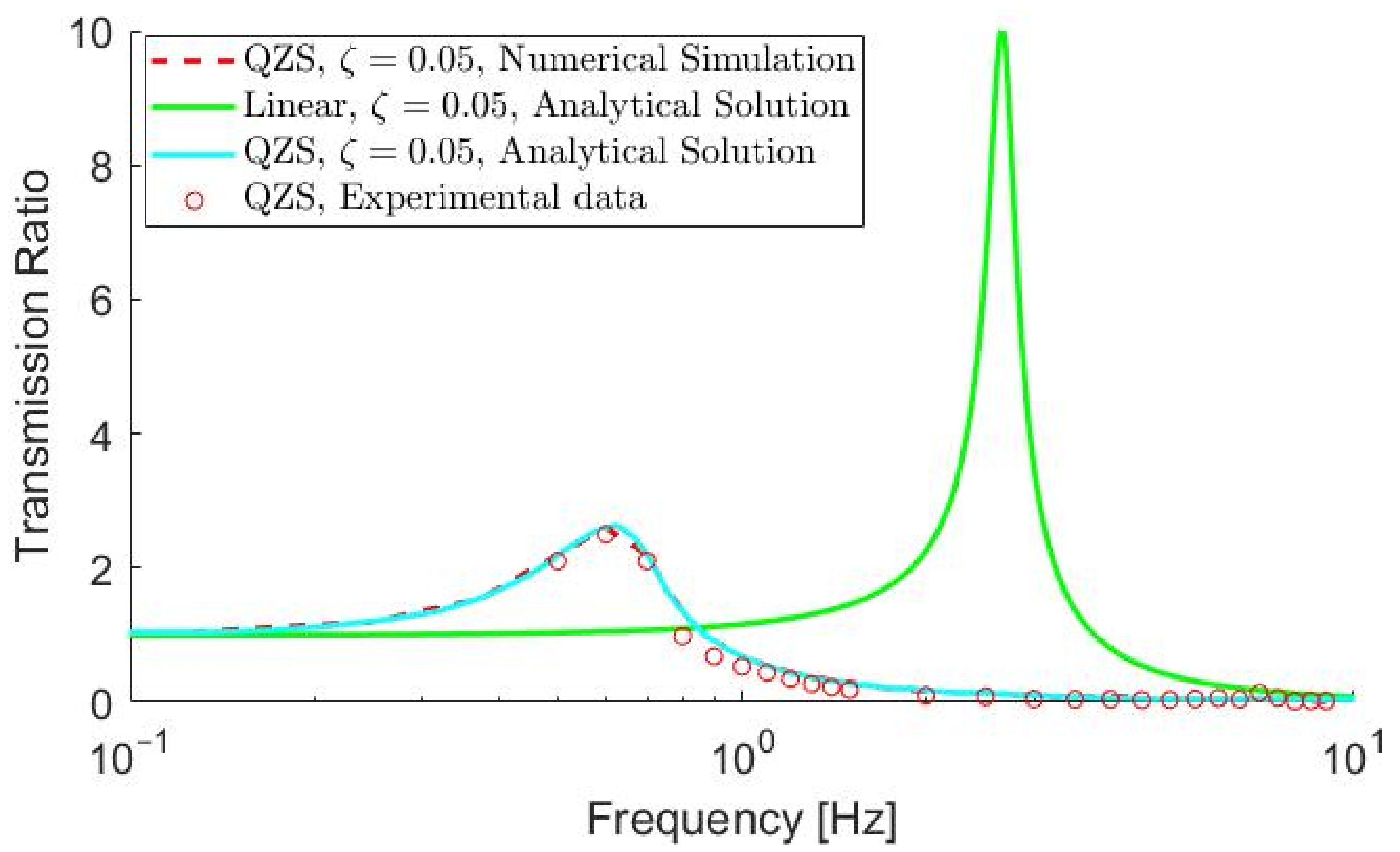
The results suggest that the novel QZS seat can greatly improve the dynamic response of the tractor seat within a laboratory setting. As shown in
Figure 12, this is particularly true when considering the size of the attenuation zone. The QZS cushion enters the attenuation zone between 1 and 1.1 Hz, exhibiting a resonant frequency of about 0.8 to 0.9 Hz. This cut-off frequency is very close to the lower limit theoretically possible for a typical passive seat, according to ASABE guidelines [
6]. In practice, the resonant frequency of typical passive seats is often much higher than this lower limit, as was seen within this study. The universal seat with a regular cushion briefly enters the attenuation zone between 3.4 and 4.1 Hz, then again at frequencies larger than 4.8 Hz (
Figure 12).
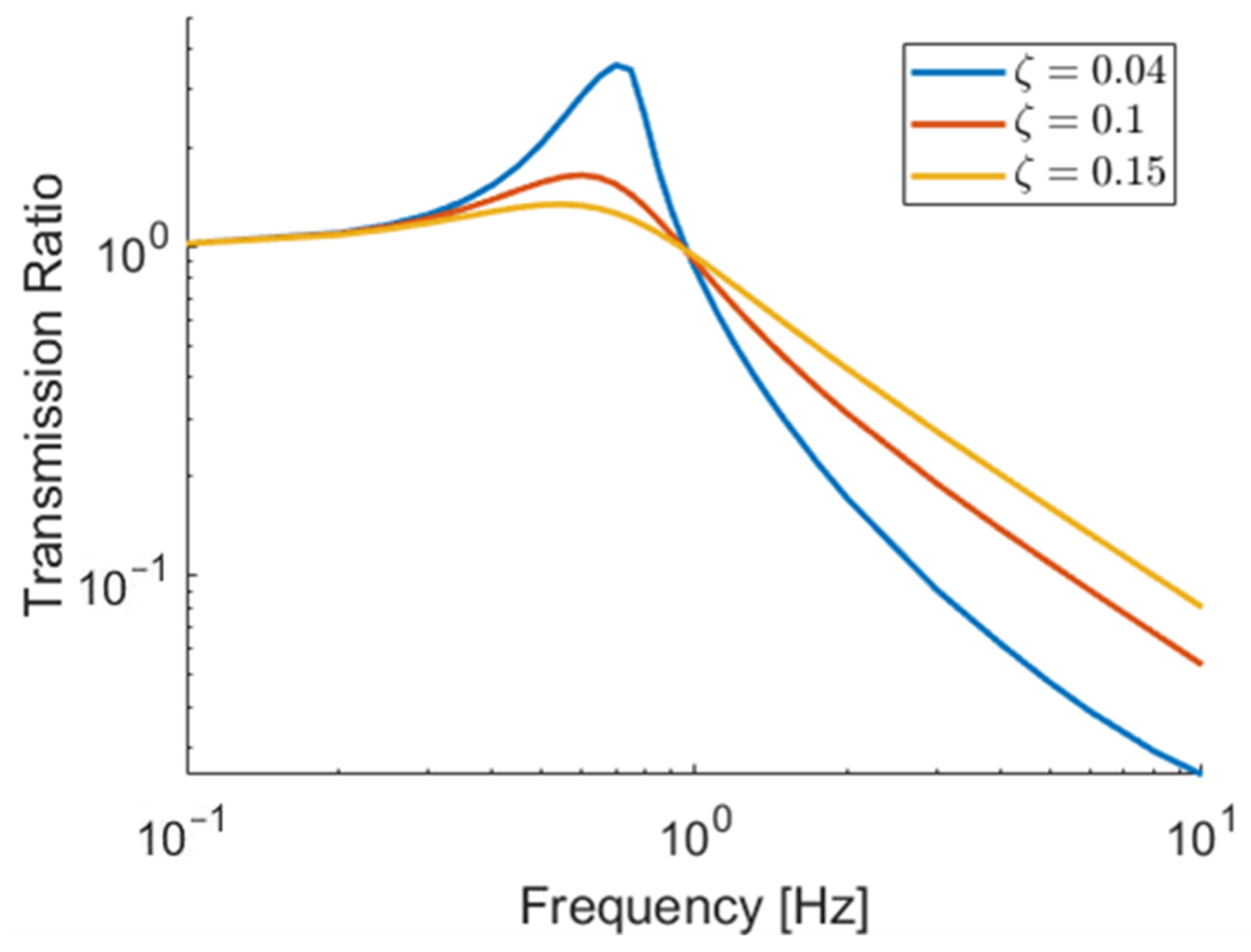
The second performance criterion considers the magnitude of the resonant peak. Using this, the QZS cushion performs considerably worse than the regular cushion. The novel cushion resonates with a peak transmission ratio of around 3.1, while the regular cushion is kept below 1.5 in the amplification zone. Theory suggests that the performance of the QZS cushion according to this criterion could be improved by adding damping to the system. The current prototype does not contain a dedicated damper, but rather relies on friction between internal components to provide a damping effect. Adding a dedicated damper would decrease the peak response of the cushion while maintaining the size of the attenuation region, as demonstrated in
Figure 14.
Finally, for the third performance criterion, the ability of the device to attenuate large frequency vibrations within the attenuation zone, the QZS cushion performs better than the foam cushion, largely due to the decreased damping present within the system. The lack of a damper enables the cushion to isolate vibrations within the attenuation zone very quickly. While beneficial, this very large attenuation may be considered less important than the ability of the device to have a smaller resonant peak. It is more beneficial to have a seat that attenuates the entire frequency spectrum well rather than to have areas of large amplification and other areas of large attenuation.
As shown in
Figure 9, friction plays a very large role in the dynamics of the overall universal seat, increasing the size of the amplification region and amplifying the cut-off frequency. When compared to the linear system, high friction improves the response of the SDOF system within the linear amplification region, but the performance becomes much worse at frequencies larger than 1.47 Hz. The FBFM models the “sliding” portion of the motion well but does not account for the attenuation seen during the “sticking” phase. Much of the amplification is due to the seat bending under load, as displayed in
Figure 7. This additional vibration mode is not included within the mathematical models presented here. When adding the QZS cushion, the “sticking” state is prolonged until much higher frequencies compared to using the foam cushion, since the QZS system attenuates much of the forces acting on mass 2.
Figure 15 shows mass 2 “sticking” until nearly 10 Hz.
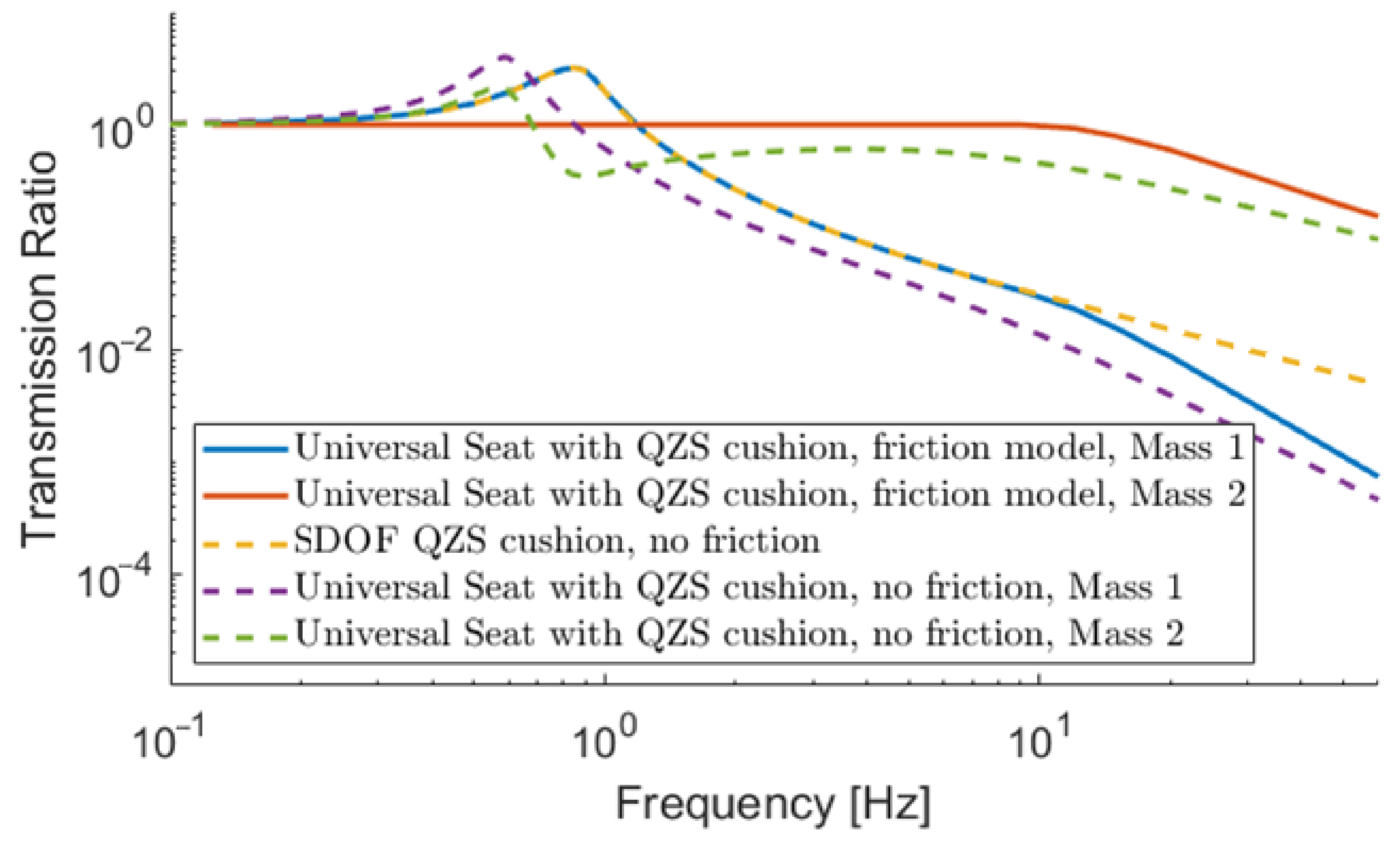
When designing a cushion that is placed on an existing tractor seat, the results suggest that it is important to consider the effects of friction within the existing seat. Within
Figure 15, the purple and green lines are analytical transmissibility curves using Equation (4) for mass 1 and 2, respectively, and do not include friction. The blue and red lines show the numerical response with friction, which is the same response as the experimental results in
Figure 12 and
Figure 13. Without friction, the cushion is expected to enter the attenuation zone at about 0.85 Hz. In reality, the cut-off frequency is 1.18 Hz. Considering ASABE guidelines that suggest that 1.13 Hz is the lowest possible cut-off frequency for a passive air suspension seat, friction transforms the seat from exceeding this guideline to performing slightly worse than it. Both with and without friction, the cut-off is lower than 1.70 Hz, the lower limit for linear steel spring seats. Incidentally, the transmissibility of mass 1 within the 2DOF universal seat with friction is well represented by a single-degree-of-freedom QZS system at low frequencies.
Figure 15 shows that the SDOF QZS response is nearly identical to that of the 2DOF model below 9 Hz. This is largely due to the “sticking” state of the tractor seat, which directly transfers excitation forces to the cushion. This is confirmed experimentally in
Figure 16, which compares the numerical and experimental transmissibility of mass 2 in the universal seat with the QZS cushion on top. Also shown in
Figure 15, in the absence of friction, the 2DOF nonlinear system performs better than the SDOF QZS system. This matches the results of Lu et al., which found that incorporating QZS into the upper stage of a two-layer system improves the overall transmissibility of the system [
30].
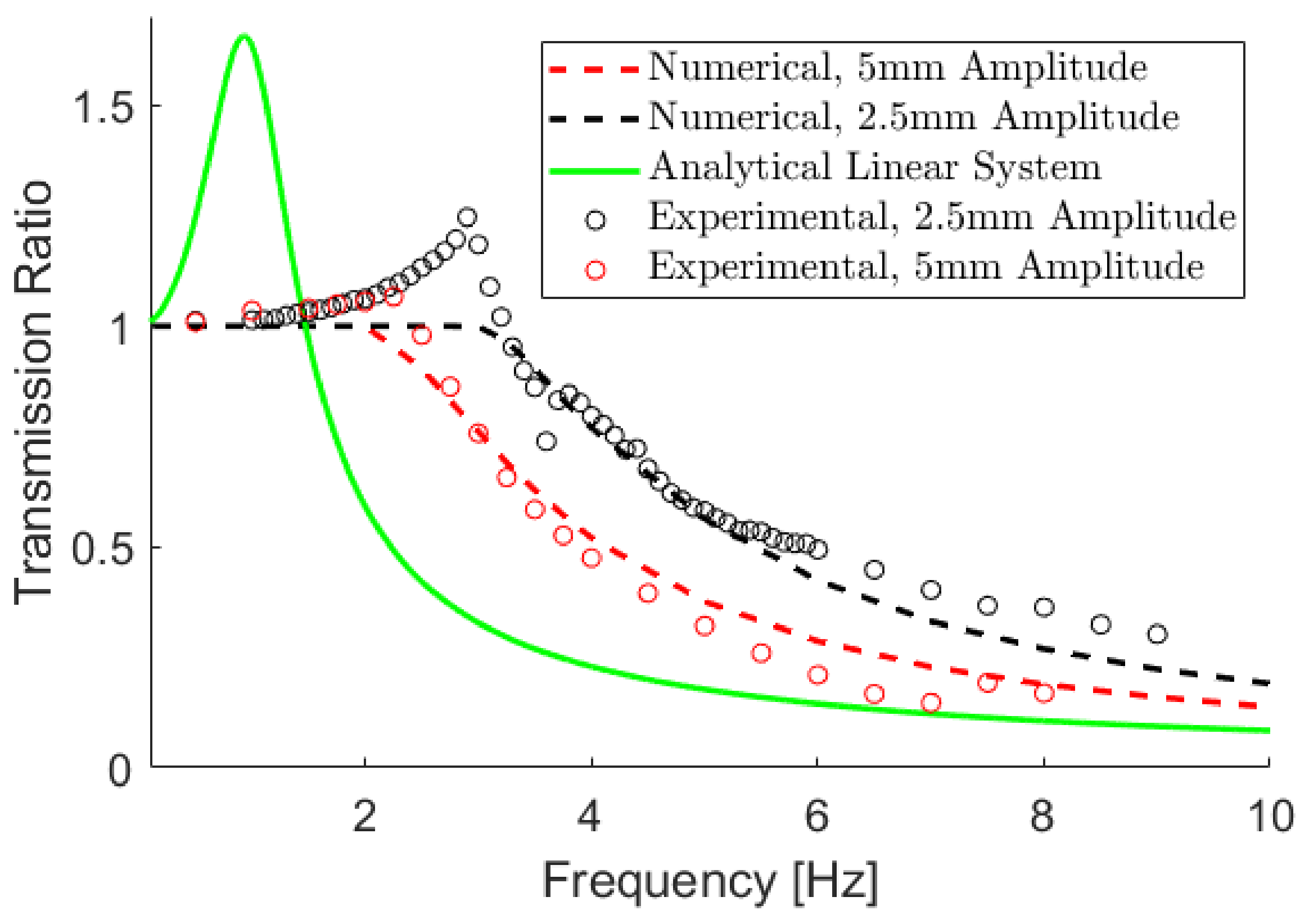
Due to the very low stiffness of the QZS system and its superior ability to isolate vibrations, it appears at first glance that the universal seat’s suspension does little to improve seat performance. While this is true within the scope of this laboratory study, it is important to consider that the performance of the QZS system decreases at larger excitation amplitudes, while the performance of the universal tractor seat increases. At larger amplitudes, friction plays a smaller role in the dynamic response of the universal seat, allowing its dynamic response to match the linear system more closely. This improved performance is confirmed in
Figure 9, where doubling the excitation amplitude results in a larger attenuation region and a smaller peak transmission ratio for the universal seat. On the contrary, as studies have shown, larger excitation amplitudes result in worse performance of a QZS system [
21,
25]. Since heavy equipment operates on rough ground where complex input frequencies larger than 5 mm are probable, the universal seat’s suspension can better attenuate large amplitude vibrations, while the QZS cushion is able to isolate low-amplitude vibrations down to about 1 Hz. The cushion presented in this paper is perhaps best compared to the work of Guo et al. [
15]. Guo et al. describe a seat cushion that contains many individual QZS elements, each using a double-diamond structure. While not built and tested experimentally, the mathematical simulations of the cushion indicate that the natural frequency would be decreased from 13.78 Hz to 3.2 Hz when going from a linear to a QZS structure. The cushion described in the current paper is able to achieve a much smaller natural frequency and therefore is able to isolate lower-frequency vibrations. This work may also be compared to Abuabiah et al. [
34], which presents a numerical simulation of a seat suspension composed of a QZS isolator and an air spring. It should be noted that this simulation models a larger replacement seat suspension, not a cushion. Furthermore, this model does not include the presence of friction. The proposed QZS cushion has a lower transmissibility and is more robust against changes in mass compared to the QZS air spring seat suspension model [
34]. However, the QZS cushion has a higher natural frequency. The higher natural frequency may be due to the absence of friction in the QZS air spring suspension model.
When utilizing QZS for the application of a seat cushion, it is important to understand the effects of mass on the system’s performance. Assuming an operator mass between 65 kg and 95 kg, a reasonable cushion should be able to accommodate any mass within this range. Using the seat parameters of the QZS cushion and the universal seat within this study,
Figure 17 shows that the performance of the seat is robust against large changes in mass. Regardless of mass, the magnitude of the resonant peak remains nearly identical, and the size of the attenuation zone is only increased by small amounts with smaller mass.
The curves in
Figure 17 assume that the cushion is tunable so that the resting equilibrium of the mass remains at the point of lowest stiffness. If the cushion is not tuned according to the mass of the operator, the performance of the cushion is much less robust. This suggests that it is critical to tune the device correctly, which is achieved by adjusting the preload on the vertical springs. This is relatively easy to accomplish when there is only a single QZS element but could prove to be more difficult when there are many QZS elements in parallel, such as within the design by Guo et al. [
15].
5. Conclusions
The purpose of this paper was to investigate a novel, low-cost seat cushion capable of attenuating low-frequency WBVs transmitted to a vehicle operator. The experimental and mathematical results show that the replacement of a stock foam cushion with a QZS cushion drastically improves the dynamic response of a tractor seat such as the Darby universal tractor seat. This is particularly true when evaluating the performance of the seat using criterion 1, the size of the attenuation zone. In the presence of large amounts of friction, the isolator can attenuate all vibrations at frequencies larger than 1.1 Hz, while the foam cushion attenuates vibrations between 3.4 Hz and 4.1 Hz, as well as frequencies larger than 4.8 Hz. In the absence of friction, the performance is further improved, and the cut-off frequency shifts to 0.85 Hz. These results meet or exceed the ASABE estimates for the best possible performance of a typical passive seat.
When evaluating the performance of the QZS cushion by observing the magnitude of the transmissibility at the resonant frequency, the QZS performs worse than the stock foam cushion. While resonance occurs at very small frequencies below 1 Hz, simulations show that the addition of a dedicated damper to the QZS system would improve the response according to this criterion. Finally, considering the response of the system within the attenuation zone, the QZS cushion performs better than the foam cushion for all frequencies smaller than 10 Hz. The performance of the cushion is not affected by the addition of a thin foam cushion near the top of the device. However, it is important to note that higher acceleration amplitudes, which may be encountered in practical applications, could limit some of the benefits of using QZS.
The performance of the SDOF and 2DOF universal seat is accurately modeled using the FBFM and the accurate acquisition of QZS parameters. Due to the sensitivity of the QZS isolator to vertical stiffness, this needs to be accurately measured using a tensile testing machine rather than relying on the manufacturer’s specifications for the parts. Small inaccuracies, including nonlinearities within the spring itself, are enough to lead to inaccurate modeling of the QZS element.
The present study shows that it is necessary to consider friction as part of a mathematical model when predicting the performance of QZS cushions on tractor seats. Suspensions such as the one on the universal seat can have large amounts of stiction, causing it to perform much worse than predicted by using simple linear modeling techniques. When the tractor seat is “sticking”, the 2DOF system can effectively be modeled as an SDOF QZS system.
Finally, the cushion is shown to be relatively insensitive to changes in mass, assuming that the cushion is accurately tuned to be at the point of lowest stiffness. This is easiest to achieve when there is only a single QZS element, rather than many that need to be tuned simultaneously.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















