
Enhancing Energy Efficiency in Connected Vehicles for Traffic Flow Optimization



Abstract
:1. Introduction
- Firstly, a robust formulation for the optimal control problem (OCP) is proposed, taking into consideration the intricate crossroads traversal of an EV as an all-encompassing cost function. This function meticulously balances the goals of energy efficiency, travel time minimization, battery life preservation, and enhanced driving comfort.
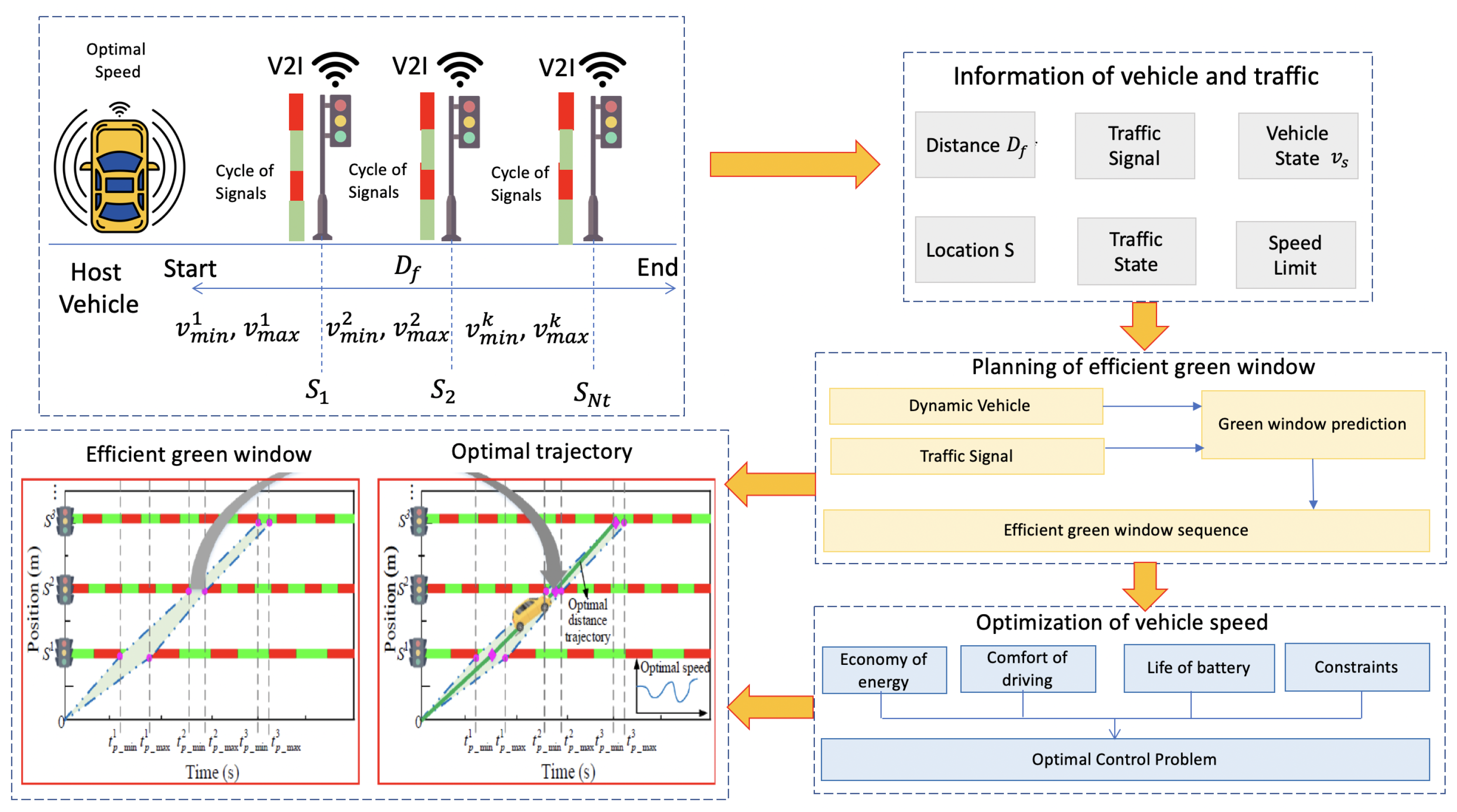
- Secondly, a two-stage M-EAD strategy takes center stage, presenting a highly efficient mechanism to resolve the multi-objective OCP. The strategy unfurls in two essential phases—a tactically devised green signal window planning phase and a meticulously choreographed speed trajectory optimization phase.
- In recognition of the intricate challenges posed by optimizing velocity profiles and managing energy, we introduce a hierarchical control structure within the Model Predictive Control (MPC) framework. This architecture serves to mitigate the inherent complexities associated with these tasks.
- We present an innovative strategy for optimizing velocity that promotes both safety and energy efficiency. This strategy centers on proactive driving by accurately anticipating forthcoming information, resulting in more effective and energy-conscious driving behaviors.
- The paper introduces computationally efficient algorithms to address real-time challenges in achieving energy-efficient outcomes. Specifically, these algorithms tackle the optimization of velocity and the management of energy independently, providing real-time solutions that meet energy-efficiency objectives.
2. Literature Review
2.1. Urban Traffic Management Strategies
2.2. Free Driving Scenarios
3. Material and Method
3.1. Models for Multiple Signalized Intersections
3.2. Vehicle Dynamics
3.3. Battery and Motor Model Quasi-Static
3.4. Control Framework and Problem Formulation
3.5. Speed Prediction Optimization
4. Simulations and Results
4.1. Reducing the Computational Burden with IDP
4.2. Discussion on the Effectiveness of the M-EAD Strategy by Considering Random Initial States of Traffic Signals
5. Conclusions
6. Future Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Oladimeji, D.; Gupta, K.; Kose, N.A.; Gundogan, K.; Ge, L.; Liang, F. Smart transportation: An overview of technologies and applications. Sensors 2023, 23, 3880. [Google Scholar] [CrossRef] [PubMed]
- Djenouri, Y.; Belhadi, A.; Srivastava, G.; Lin, J.C.W. Hybrid graph convolution neural network and branch-and-bound optimization for traffic flow forecasting. Future Gener. Comput. Syst. 2023, 139, 100–108. [Google Scholar] [CrossRef]
- Lan, T.; Zhang, X.; Qu, D.; Yang, Y.; Chen, Y. Short-Term Traffic Flow Prediction Based on the Optimization Study of Initial Weights of the Attention Mechanism. Sustainability 2023, 15, 1374. [Google Scholar] [CrossRef]
- Liu, K.; Xu, X.; Huang, W.; Zhang, R.; Kong, L.; Wang, X. A multi-objective optimization framework for designing urban block forms considering daylight, energy consumption, and photovoltaic energy potential. Build. Environ. 2023, 242, 110585. [Google Scholar] [CrossRef]
- Jafari, S.; Shahbazi, Z.; Byun, Y.C. Lithium-ion battery health prediction on hybrid vehicles using machine learning approach. Energies 2022, 15, 4753. [Google Scholar] [CrossRef]
- Benotsmane, R.; Kovács, G. Optimization of energy consumption of industrial robots using classical PID and MPC controllers. Energies 2023, 16, 3499. [Google Scholar] [CrossRef]
- Zhang, Y.; Kamargianni, M. A review on the factors influencing the adoption of new mobility technologies and services: Autonomous vehicle, drone, micromobility and mobility as a service. Transp. Rev. 2023, 43, 407–429. [Google Scholar] [CrossRef]
- Jafari, S.; Shahbazi, Z.; Byun, Y.C.; Lee, S.J. Lithium-ion battery estimation in online framework using extreme gradient boosting machine learning approach. Mathematics 2022, 10, 888. [Google Scholar] [CrossRef]
- Daniela, A.M.; Juan Carlos, G.P.; Javier, G. On the path to mobility as a service: A MaaS-checklist for assessing existing MaaS-like schemes. Transp. Lett. 2023, 15, 142–151. [Google Scholar] [CrossRef]
- Salari, A.H.; Mirzaeinejad, H.; Mahani, M.F. A new control algorithm of regenerative braking management for energy efficiency and safety enhancement of electric vehicles. Energy Convers. Manag. 2023, 276, 116564. [Google Scholar] [CrossRef]
- Erdoğan, B.; Tural, M.K.; Khoei, A.A. Finding an energy efficient path for plug-in electric vehicles with speed optimization and travel time restrictions. Comput. Ind. Eng. 2023, 176, 108987. [Google Scholar] [CrossRef]
- Jafari, S.; Shahbazi, Z.; Byun, Y.C. Designing the controller-based urban traffic evaluation and prediction using model predictive approach. Appl. Sci. 2022, 12, 1992. [Google Scholar] [CrossRef]
- Jafari, S.; Shahbazi, Z.; Byun, Y.C. Traffic control prediction design based on fuzzy logic and lyapunov approaches to improve the performance of road intersection. Processes 2021, 9, 2205. [Google Scholar] [CrossRef]
- Yuan, H.; Li, G. A survey of traffic prediction: From spatio-temporal data to intelligent transportation. Data Sci. Eng. 2021, 6, 63–85. [Google Scholar] [CrossRef]
- Chen, J.; Xue, Z.; Fan, D. Deep reinforcement learning based left-turn connected and automated vehicle control at signalized intersection in vehicle-to-infrastructure environment. Information 2020, 11, 77. [Google Scholar] [CrossRef]
- Shahbazi, Z.; Byun, Y.C. A framework of vehicular security and demand service prediction based on data analysis integrated with blockchain approach. Sensors 2021, 21, 3314. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, Y.; Zhou, Y. Integrated scheduling of zone picking and vehicle routing problem with time windows in the front warehouse mode. Comput. Ind. Eng. 2022, 163, 107823. [Google Scholar] [CrossRef]
- Cao, X.; Sun, C.; Yan, M. Target search control of AUV in underwater environment with deep reinforcement learning. IEEE Access 2019, 7, 96549–96559. [Google Scholar] [CrossRef]
- Zhao, S.; Wang, C.; Wei, P.; Zhao, Q. Research on the deep recognition of urban road vehicle flow based on deep learning. Sustainability 2020, 12, 7094. [Google Scholar] [CrossRef]
- Gao, B.; Wan, K.; Chen, Q.; Wang, Z.; Li, R.; Jiang, Y.; Mei, R.; Luo, Y.; Li, K. A Review and Outlook on Predictive Cruise Control of Vehicles and Typical Applications Under Cloud Control System. Mach. Intell. Res. 2023, 20, 614–639. [Google Scholar] [CrossRef]
- Miglani, A.; Kumar, N. Deep learning models for traffic flow prediction in autonomous vehicles: A review, solutions, and challenges. Veh. Commun. 2019, 20, 100184. [Google Scholar] [CrossRef]
- Yu, M. Construction of regional intelligent transportation system in smart city road network via 5G network. IEEE Trans. Intell. Transp. Syst. 2022, 24, 2208–2216. [Google Scholar] [CrossRef]
- Jamil, F.; Ahmad, S.; Whangbo, T.K.; Muthanna, A.; Kim, D.H. Improving blockchain performance in clinical trials using intelligent optimal transaction traffic control mechanism in smart healthcare applications. Comput. Ind. Eng. 2022, 170, 108327. [Google Scholar] [CrossRef]
- Liu, L.; Lu, S.; Zhong, R.; Wu, B.; Yao, Y.; Zhang, Q.; Shi, W. Computing systems for autonomous driving: State of the art and challenges. IEEE Internet Things J. 2020, 8, 6469–6486. [Google Scholar] [CrossRef]
- Mehdi, M.Z.; Kammoun, H.M.; Benayed, N.G.; Sellami, D.; Masmoudi, A.D. Entropy-based traffic flow labeling for CNN-based traffic congestion prediction from meta-parameters. IEEE Access 2022, 10, 16123–16133. [Google Scholar] [CrossRef]
- Ibrahim, M.; Hanif, M.; Ahmad, S.; Jamil, F.; Sehar, T.; Lee, Y.; Kim, D. SDN based DDos mitigating approach using traffic entropy for IoT network. CMC Comput. Mater. Contin. 2022, 70, 5651–5665. [Google Scholar] [CrossRef]
- Shamsaimon, N.; Mat Razali, N.A.; Abd Majid, K.; Ramli, S.; Mohamad Amran, M.F.; Ishak, K.K.; Ahmad, R. Traffic flow prediction using long-short term memory technique for connected vehicles in smart cities. In Proceedings of the Advances in Visual Informatics: 7th International Visual Informatics Conference, IVIC 2021, Kajang, Malaysia, 23–25 November 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 411–422. [Google Scholar]
- Jafari, S.; Shahbazi, Z.; Byun, Y.C. Improving the performance of single-intersection urban traffic networks based on a model predictive controller. Sustainability 2021, 13, 5630. [Google Scholar] [CrossRef]
- Zhuang, W.; Qu, L.; Xu, S.; Li, B.; Chen, N.; Yin, G. Integrated energy-oriented cruising control of electric vehicle on highway with varying slopes considering battery aging. Sci. China Technol. Sci. 2020, 63, 155–165. [Google Scholar] [CrossRef]
- Ding, F.; Jin, H. On the optimal speed profile for eco-driving on curved roads. IEEE Trans. Intell. Transp. Syst. 2018, 19, 4000–4010. [Google Scholar] [CrossRef]
- Mello, E.F.; Bauer, P.H. Energy-optimal speed trajectories between stops. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4328–4337. [Google Scholar] [CrossRef]
- Zhang, Y.; Qu, X.; Tong, L. Optimal eco-driving control of autonomous and electric trucks in adaptation to highway topography: Energy minimization and battery life extension. IEEE Trans. Transp. Electrif. 2022, 8, 2149–2163. [Google Scholar] [CrossRef]
- He, Y.; Zhou, Q.; Makridis, M.; Mattas, K.; Li, J.; Williams, H.; Xu, H. Multiobjective co-optimization of cooperative adaptive cruise control and energy management strategy for PHEVs. IEEE Trans. Transp. Electrif. 2020, 6, 346–355. [Google Scholar] [CrossRef]
- Shao, Y.; Sun, Z. Eco-approach with traffic prediction and experimental validation for connected and autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 22, 1562–1572. [Google Scholar] [CrossRef]
- Hao, P.; Wu, G.; Boriboonsomsin, K.; Barth, M.J. Eco-approach and departure (EAD) application for actuated signals in real-world traffic. IEEE Trans. Intell. Transp. Syst. 2018, 20, 30–40. [Google Scholar] [CrossRef]
- Sun, C.; Guanetti, J.; Borrelli, F.; Moura, S.J. Optimal eco-driving control of connected and autonomous vehicles through signalized intersections. IEEE Internet Things J. 2020, 7, 3759–3773. [Google Scholar] [CrossRef]
- Han, J.; Shen, D.; Karbowski, D.; Rousseau, A. Leveraging multiple connected traffic light signals in an energy-efficient speed planner. IEEE Control. Syst. Lett. 2020, 5, 2078–2083. [Google Scholar] [CrossRef]
- Lin, Q.; Li, S.E.; Xu, S.; Du, X.; Yang, D.; Li, K. Eco-driving operation of connected vehicle with V2I communication among multiple signalized intersections. IEEE Intell. Transp. Syst. Mag. 2020, 13, 107–119. [Google Scholar] [CrossRef]
- Dong, H.; Zhuang, W.; Chen, B.; Lu, Y.; Liu, S.; Xu, L.; Pi, D.; Yin, G. Predictive energy-efficient driving strategy design of connected electric vehicle among multiple signalized intersections. Transp. Res. Part Emerg. Technol. 2022, 137, 103595. [Google Scholar] [CrossRef]
- Xie, L.; Luo, Y.; Zhang, D.; Chen, R.; Li, K. Intelligent energy-saving control strategy for electric vehicle based on preceding vehicle movement. Mech. Syst. Signal Process. 2019, 130, 484–501. [Google Scholar] [CrossRef]
- Wegener, M.; Koch, L.; Eisenbarth, M.; Andert, J. Automated eco-driving in urban scenarios using deep reinforcement learning. Transp. Res. Part Emerg. Technol. 2021, 126, 102967. [Google Scholar] [CrossRef]
- Dong, H.; Zhuang, W.; Chen, B.; Yin, G.; Wang, Y. Enhanced eco-approach control of connected electric vehicles at signalized intersection with queue discharge prediction. IEEE Trans. Veh. Technol. 2021, 70, 5457–5469. [Google Scholar] [CrossRef]
- Yang, H.; Rakha, H.; Ala, M.V. Eco-cooperative adaptive cruise control at signalized intersections considering queue effects. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1575–1585. [Google Scholar] [CrossRef]
- Sciarretta, A.; Vahidi, A. Energy-Efficient Driving of Road Vehicles; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Shahzad, A.; Mushtaq, A.; Sabeeh, A.Q.; Ghadi, Y.Y.; Mushtaq, Z.; Arif, S.; ur Rehman, M.Z.; Qureshi, M.F.; Jamil, F. Automated Uterine Fibroids Detection in Ultrasound Images Using Deep Convolutional Neural Networks. Healthcare 2023, 11, 1493. [Google Scholar] [CrossRef]
- Ahmad, S.; Ali, J.; Jamil, F.; Whangbo, T.K.; Kim, D. Complex problems solution as a service based on predictive optimization and tasks orchestration in smart cities. Safety 2021, 7, 8. [Google Scholar] [CrossRef]
- Araghi, F.M.; Rabinwoitz, A.; Ang, C.C.; Sharma, S.; Kadav, P.; Meyer, R.T.; Bradley, T.; Asher, Z.D. Identifying and assessing research gaps for energy efficient control of electrified autonomous vehicle Eco-Driving. Mach. Learn. Optim. Tech. Automot. -Cyber -Phys. Syst. 2023, 85, 759–786. [Google Scholar]
- Shams, A.; Mahmud, S.; Day, C.M. Comparison of Flow-and Bandwidth-Based Methods of Traffic Signal Offset Optimization. J. Transp. Eng. Part Syst. 2023, 149, 04023033. [Google Scholar] [CrossRef]
- Sagar, A.; Kashyap, A.; Nasab, M.A.; Padmanaban, S.; Bertoluzzo, M.; Kumar, A.; Blaabjerg, F. A comprehensive review of the recent development of wireless power transfer technologies for electric vehicle charging systems. IEEE Access 2023, 11, 83703–83751. [Google Scholar] [CrossRef]
- Cremen, G.; Galasso, C.; McCloskey, J.; Barcena, A.; Creed, M.; Filippi, M.E.; Gentile, R.; Jenkins, L.T.; Kalaycioglu, M.; Mentese, E.Y.; et al. A state-of-the-art decision-support environment for risk-sensitive and pro-poor urban planning and design in Tomorrow’s cities. Int. J. Disaster Risk Reduct. 2023, 85, 103400. [Google Scholar] [CrossRef]
- Winther, T.; Sundet, Ø. Flexibility for whom? Householder and stakeholder perspectives on justice regarding the introduction of dynamic grid tariffs in Norway. Energy Effic. 2023, 16, 1–27. [Google Scholar] [CrossRef]
- Wang, Y.; Li, B.; Zhao, Z.; Bao, J.; Wang, X. Optimal Routing and Charging Strategy of Electric Vehicles Based on Traffic Flow Prediction. 2023. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract-id=4493776 (accessed on 12 July 2023).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Aspect | Presented Study (M-EAD) | Previous Study |
|---|---|---|
| Research Problem | Addressing energy efficiency challenges caused by traffic lights in urban EVs. | Various urban traffic management strategies, but limited focus on EV energy efficiency [47]. |
| Research Methodology | Proposed M-EAD strategy, consisting of signal window optimization and speed trajectory refinement, substantiated through on-road vehicle tests. | Varied methodologies, including signal timing optimization and traffic flow models [48]. |
| Research Result | Achieved a 0.92 reduction in energy consumption and 0.0017% battery wear. | Diverse results based on specific strategies, often without EV specific performance metrics [49]. |
| Contribution to Science | Offers a comprehensive solution to enhance urban EV energy efficiency under traffic light conditions. | Addresses specific aspects of urban traffic management but may not directly focus on EVs [50]. |
| Contribution to Practice | Provides a practical strategy for improving EV performance in urban traffic scenarios. | Offers insights into urban traffic management but may not directly benefit EVs [51]. |
| Practical Implications | Benefits EV users by enhancing energy efficiently, battery longevity, and travel comfort. | Enhances overall traffic flow and may indirectly benefit EVs, depending on traffic conditions [52]. |
| Location (S) | Green Signal | Signal Cycle time | Indication of Signal P | Transition Time | Max Speed (km/h) | Min Speed (km/h) |
|---|---|---|---|---|---|---|
| 460 | 28 | 97 | Red | 26 | 60 | 30 |
| 1625 | 48 | 97 | Red | 9 | 60 | 30 |
| 3015 | 40 | 86 | Green | 6 | 50 | 30 |
| 3945 | 34 | 105 | Red | 62 | 60 | 30 |
| 5740 | 35 | 97 | Red | 34 | 70 | 30 |
| Intersection ID | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Signal cycle of efficient traffic | 7 | 5 | 4 | 3 | 5 | 4 | 3 | 2 | 2 | 1 |
| Green window interval (s) | [499, 546] | [430, 460] | [380, 411] | [277, 312] | [240, 269] | [228, 270] | [190, 220] | [110, 160] | [80, 127] | [30, 60] |
| Efficient green window interval (s) | [499, 546] | [427, 460] | [380, 415] | [299, 310] | [280, 270] | [240, 250] | [190, 195] | [111, 150] | [80, 116] | [31, 60] |
| Parameter | Time of Calculation | Cost | ||
|---|---|---|---|---|
| Reduction | Value | Increase | Value | |
| IDP | 90% | 240.9 s | 4.88% | 56,200.87 |
| DP | - | 2160.5 s | - | 53,213.90 |
| Strategy | M-EAD A | M-EAD B | I-EAD | CS (M-EAD A) | CS (M-EAD B) |
|---|---|---|---|---|---|
| Capacity of battery | 0.0017% | 0.0014% | 0.0015% | 0.0017% | 0.0016% |
| Time of travel | 498.5 s | 540.4 s | 629.5 s | 511.3 s | 674.9 s |
| Energy consumption | 2666.95 kj | 1922.94 kj | 2179.65 kj | 2689.52 kj | 2398.24 kj |
| Strategy | I-EAD | CS (M-EAD A) | CS (M-EAD B) | |
|---|---|---|---|---|
| Extending the battery life | M-EAD A | −14.29% | 0% | 13.34% |
| M-EAD B | 7.14% | - | - | |
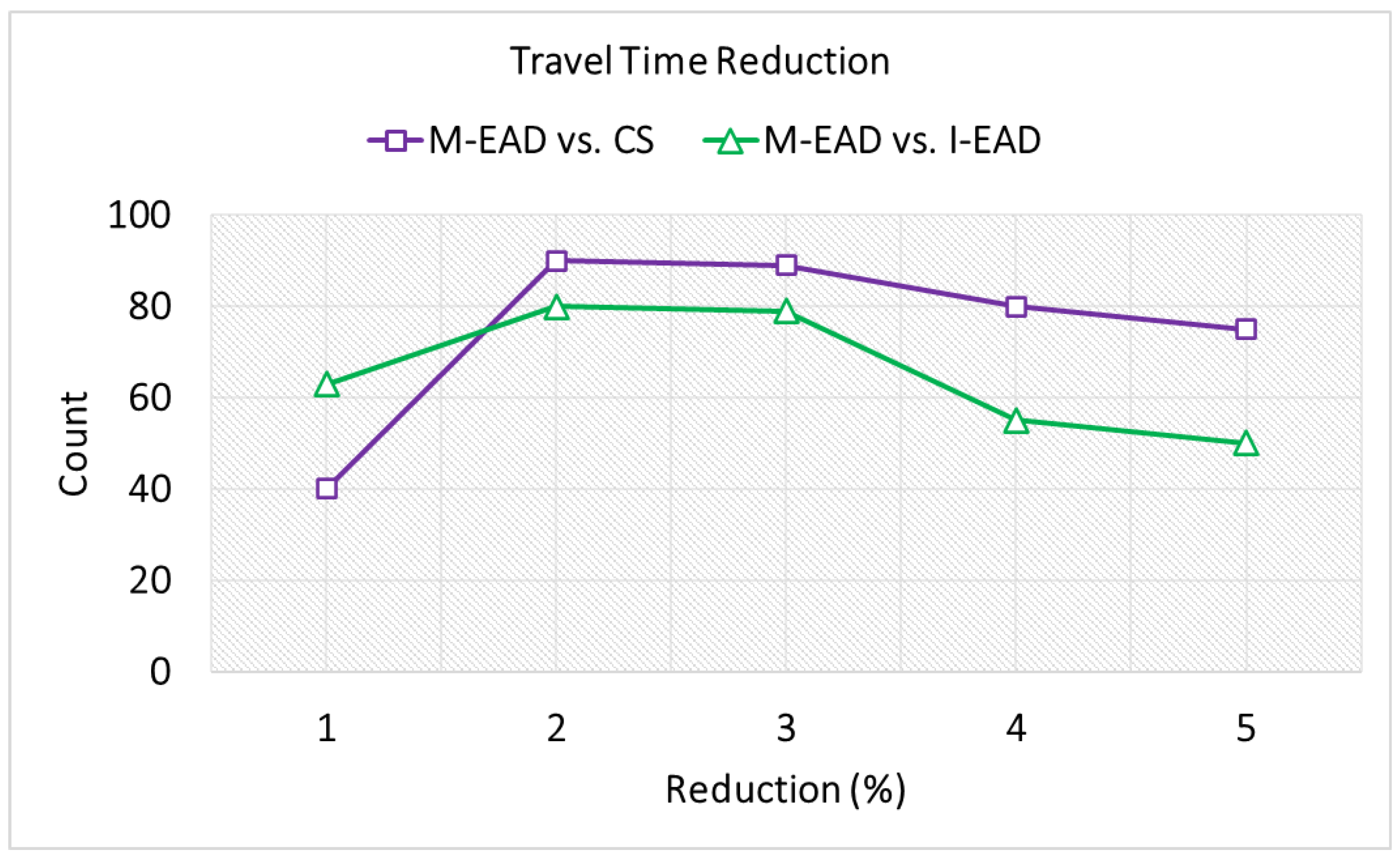
| Reduction Time of travel | M-EAD A | 20.87% | 2.49% | - |
| M-EAD B | 14.22% | - | 19.98% | |
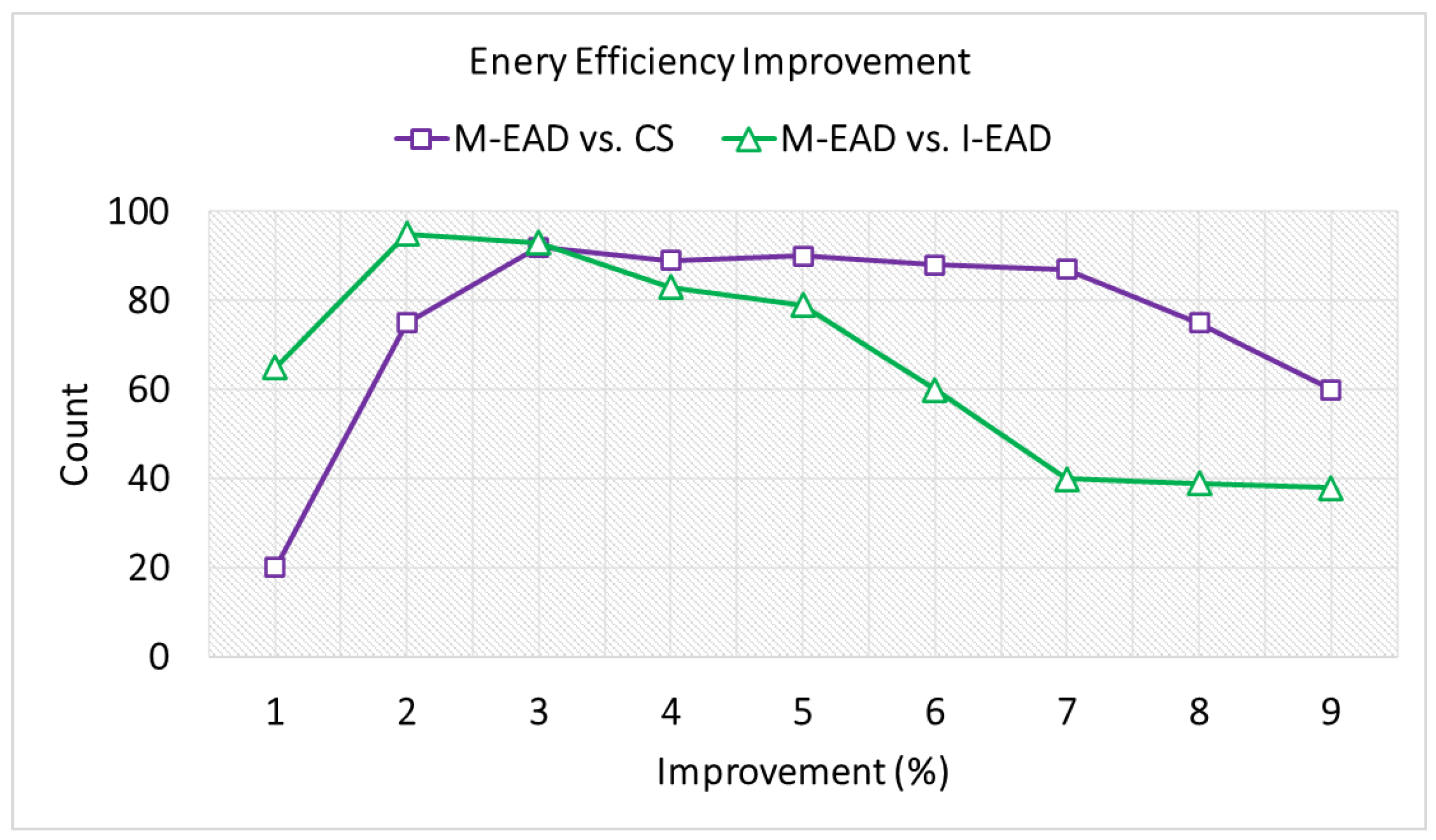
| Energy efficiency | M-EAD A | −24.05% | 0.92% | - |
| M-EAD B | 7.58% | - | 16.41% | |
| Improvement of Energy Efficiency | Avg. Reduction of Battery Capacity | Avg. Reduction of Travel Time | |
|---|---|---|---|
| M-EAD/I-EAD | 7.02% | 5.06% | 14.97% |
| M-EAD/CS | 11.04% | 10.90% | 16.78% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahbazi, Z.; Nowaczyk, S. Enhancing Energy Efficiency in Connected Vehicles for Traffic Flow Optimization. Smart Cities 2023, 6, 2574-2592. https://doi.org/10.3390/smartcities6050116
Shahbazi Z, Nowaczyk S. Enhancing Energy Efficiency in Connected Vehicles for Traffic Flow Optimization. Smart Cities. 2023; 6(5):2574-2592. https://doi.org/10.3390/smartcities6050116
Chicago/Turabian StyleShahbazi, Zeinab, and Slawomir Nowaczyk. 2023. "Enhancing Energy Efficiency in Connected Vehicles for Traffic Flow Optimization" Smart Cities 6, no. 5: 2574-2592. https://doi.org/10.3390/smartcities6050116
APA StyleShahbazi, Z., & Nowaczyk, S. (2023). Enhancing Energy Efficiency in Connected Vehicles for Traffic Flow Optimization. Smart Cities, 6(5), 2574-2592. https://doi.org/10.3390/smartcities6050116