

Gauging Public Acceptance of Conditionally Automated Vehicles in the United States


Abstract
1. Introduction
- RQ1. What factors may influence public acceptance of CAVs in the United States?
- RQ2. Are there any differences in public acceptance of CAVs in the United States based on age, experience, or gender?
2. Background
3. Materials and Methods
3.1. Development of the Hypotheses and Model
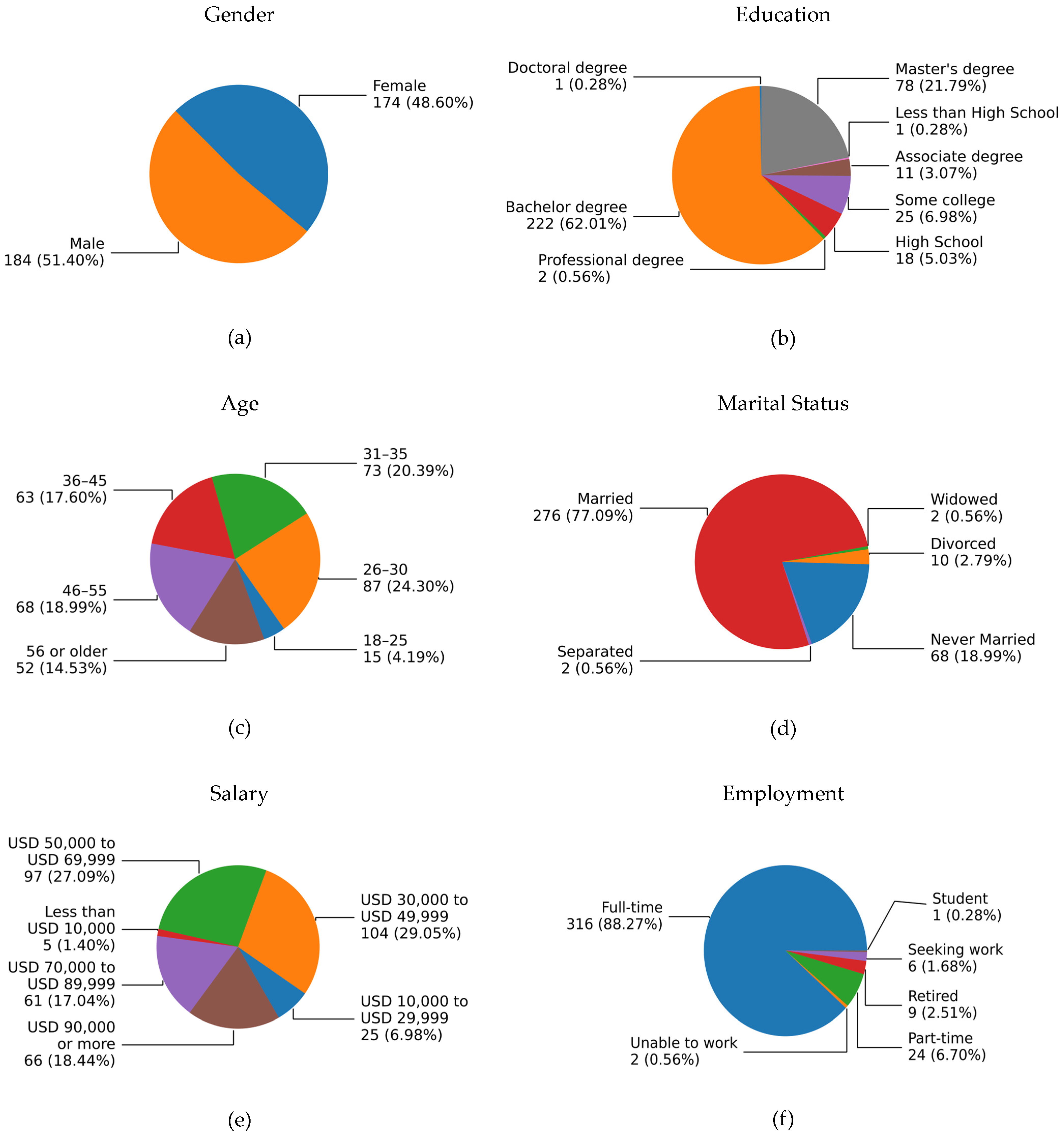
3.2. Instrument, Data Collection, and Sociodemographic Profile of Sample
3.3. Data Analysis
4. Results
4.1. Measurement Model
4.2. Structural Model
5. Discussion
6. Conclusions
6.1. Theoretical, Practical, and Policy Implications
6.2. Limitations and Future Research Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Seuwou, P.; Banissi, E.; Ubakanma, G. The Future of Mobility with Connected and Autonomous Vehicles in Smart Cities. In Digital Twin Technologies and Smart Cities; Springer: Cham, Switzerland, 2020; pp. 37–52. [Google Scholar]
- Campisi, T.; Severino, A.; Al-Rashid, M.A.; Pau, G. The Development of the Smart Cities in the Connected and Autonomous Vehicles (CAVs) Era: From Mobility Patterns to Scaling in Cities. Infrastructures 2021, 6, 100. [Google Scholar] [CrossRef]
- Medina-Tapia, M.; Robusté, F. Exploring Paradigm Shift Impacts in Urban Mobility: Autonomous Vehicles and Smart Cities. Transp. Res. Procedia 2018, 33, 203–210. [Google Scholar] [CrossRef]
- Cugurullo, F.; Acheampong, R.A.; Gueriau, M.; Dusparic, I. The Transition to Autonomous Cars, the Redesign of Cities and the Future of Urban Sustainability. Urban Geogr. 2021, 42, 833–859. [Google Scholar] [CrossRef]
- Wessling, B. Mercedes Rolls Out Level 3 Autonomous Driving Tech in Germany. Available online: https://www.therobotreport.com/mercedes-rolls-out-level-3-autonomous-driving-tech-in-germany/ (accessed on 26 November 2023).
- Dent, S. Mercedes Becomes the First Automaker to Sell Level 3 Self-Driving Vehicles in California. Available online: https://www.engadget.com/mercedes-becomes-the-first-automaker-to-sell-level-3-self-driving-vehicles-in-california-103504319.html (accessed on 1 December 2023).
- SAE Levels of Driving AutomationTM Refined for Clarity and International Audience. Available online: https://www.sae.org/site/blog/sae-j3016-update (accessed on 26 November 2023).
- Faaeq, M.K.; Ismail, N.A.; Osman, W.R.S.; Al–Swidi, A.K.; Faieq, A.K. A Meta–Analysis of the Unified Theory of Acceptance and Use of Technology Studies among Several Countries. Electron. Gov. Int. J. 2013, 10, 343–360. [Google Scholar] [CrossRef]
- Tamilmani, K.; Rana, N.P.; Dwivedi, Y.K. Consumer Acceptance and Use of Information Technology: A Meta-Analytic Evaluation of UTAUT2. Inf. Syst. Front. 2021, 23, 987–1005. [Google Scholar] [CrossRef]
- Foroughi, B.; Nhan, P.V.; Iranmanesh, M.; Ghobakhloo, M.; Nilashi, M.; Yadegaridehkordi, E. Determinants of Intention to Use Autonomous Vehicles: Findings from PLS-SEM and ANFIS. J. Retail. Consum. Serv. 2023, 70, 103158. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the Safety Impact of Connected and Autonomous Vehicles on Motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef] [PubMed]
- Rani, S.; Mishra, R.K.; Usman, M.; Kataria, A.; Kumar, P.; Bhambri, P.; Mishra, A.K. Amalgamation of Advanced Technologies for Sustainable Development of Smart City Environment: A Review. IEEE Access 2021, 9, 150060–150087. [Google Scholar] [CrossRef]
- Silva, B.N.; Khan, M.; Han, K. Towards Sustainable Smart Cities: A Review of Trends, Architectures, Components, and Open Challenges in Smart Cities. Sustain. Cities Soc. 2018, 38, 697–713. [Google Scholar] [CrossRef]
- Golson, D. We Put Our Blind Faith in Mercedes-Benz’s First-of-Its-Kind Autonomous Drive Pilot Feature. Available online: https://www.theverge.com/2023/9/27/23892154/mercedes-benz-drive-pilot-autonomous-level-3-test (accessed on 1 December 2023).
- Hawkins, A.J. Mercedes-Benz Is the First to Bring Level 3 Automated Driving to the US. Available online: https://www.theverge.com/2023/1/27/23572942/mercedes-drive-pilot-level-3-approved-nevada (accessed on 9 September 2023).
- UPDATE 3-Mercedes-Benz Beats Tesla for California’s Approval of Automated Driving Tech. Available online: https://finance.yahoo.com/news/1-california-dmv-conditionally-approves-175205411.html (accessed on 1 December 2023).
- Level 3 Highly Automated Driving Available in the New BMW 7 Series from Next Spring. Available online: https://www.press.bmwgroup.com/global/article/detail/T0438214EN/level-3-highly-automated-driving-available-in-the-new-bmw-7-series-from-next-spring?language=en (accessed on 1 December 2023).
- O’Hern, S.; Louis, R.S. Technology Readiness and Intentions to Use Conditionally Automated Vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2023, 94, 1–8. [Google Scholar] [CrossRef]
- Lehtonen, E.; Malin, F.; Innamaa, S.; Nordhoff, S.; Louw, T.; Bjorvatn, A.; Merat, N. Are Multimodal Travellers Going to Abandon Sustainable Travel for L3 Automated Vehicles? Transp. Res. Interdiscip. Perspect. 2021, 10, 100380. [Google Scholar] [CrossRef]
- Lehtonen, E.; Malin, F.; Louw, T.; Lee, Y.M.; Itkonen, T.; Innamaa, S. Why Would People Want to Travel More with Automated Cars? Transp. Res. Part F Traffic Psychol. Behav. 2022, 89, 143–154. [Google Scholar] [CrossRef]
- Louw, T.; Madigan, R.; Lee, Y.M.; Nordhoff, S.; Lehtonen, E.; Innamaa, S.; Malin, F.; Bjorvatn, A.; Merat, N. Drivers’ Intentions to Use Different Functionalities of Conditionally Automated Cars: A Survey Study of 18,631 Drivers from 17 Countries. Int. J. Environ. Res. Public Health 2021, 18, 12054. [Google Scholar] [CrossRef]
- Schrauth, B.; Funk, W.; Maier, S.; Kraetsch, C. The Acceptance of Conditionally Automated Cars from the Perspective of Different Road User Groups. Eur. J. Transp. Infrastruct. Res. 2021, 21, 81–103. [Google Scholar] [CrossRef]
- Rahman, M.M.; Thill, J.-C. What Drives People’s Willingness to Adopt Autonomous Vehicles? A Review of Internal and External Factors. Sustainability 2023, 15, 11541. [Google Scholar] [CrossRef]
- Nordhoff, S.; Kyriakidis, M.; van Arem, B.; Happee, R. A Multi-Level Model on Automated Vehicle Acceptance (MAVA): A Review-Based Study. Theor. Issues Ergon. Sci. 2019, 20, 682–710. [Google Scholar] [CrossRef]
- Edelmann, A.; Stümper, S.; Petzoldt, T. Cross-Cultural Differences in the Acceptance of Decisions of Automated Vehicles. Appl. Ergon. 2021, 92, 103346. [Google Scholar] [CrossRef]
- Nordhoff, S.; Louw, T.; Innamaa, S.; Lehtonen, E.; Beuster, A.; Torrao, G.; Bjorvatn, A.; Kessel, T.; Malin, F.; Happee, R.; et al. Using the UTAUT2 Model to Explain Public Acceptance of Conditionally Automated (L3) Cars: A Questionnaire Study among 9,118 Car Drivers from Eight European Countries. Transp. Res. Part F Traffic Psychol. Behav. 2020, 74, 280–297. [Google Scholar] [CrossRef]
- Fishbein, M.; Ajzen, I. Belief, Attitude, Intention, and Behavior: An Introduction to Theory and Research; Addison-Wesley: Reading, MA, USA, 1977. [Google Scholar]
- Venkatesh, V.; Thong, J.; Xu, X. Consumer Acceptance and Use of Information Technology: Extending the Unified Theory of Acceptance and Use of Technology. MIS Q. 2012, 36, 157–178. [Google Scholar] [CrossRef]
- Herrenkind, B.; Nastjuk, I.; Brendel, A.B.; Trang, S.; Kolbe, L.M. Young People’s Travel Behavior—Using the Life-Oriented Approach to Understand the Acceptance of Autonomous Driving. Transp. Res. Part D Transp. Environ. 2019, 74, 214–233. [Google Scholar] [CrossRef]
- Nordhoff, S.; Madigan, R.; Van Arem, B.; Merat, N.; Happee, R. Interrelationships among Predictors of Automated Vehicle Acceptance: A Structural Equation Modelling Approach. Theor. Issues Ergon. Sci. 2021, 22, 383–408. [Google Scholar] [CrossRef]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Lin, R.; Zhang, W. The Roles of Initial Trust and Perceived Risk in Public’s Acceptance of Automated Vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 207–220. [Google Scholar] [CrossRef]
- Adams, D.A.; Nelson, R.R.; Todd, P.A. Perceived Usefulness, Ease of Use, and Usage of Information Technology: A Replication. MIS Q. 1992, 16, 227–247. [Google Scholar] [CrossRef]
- Karahanna, E.; Agarwal, R.; Angst, C.M. Reconceptualizing Compatibility Beliefs in Technology Acceptance Research. MIS Q. 2006, 30, 781–804. [Google Scholar] [CrossRef]
- Venkatesh, V.; Davis, F.D. A Theoretical Extension of the Technology Acceptance Model: Four Longitudinal Field Studies. Manag. Sci. 2000, 46, 186–204. [Google Scholar] [CrossRef]
- Acheampong, R.A.; Cugurullo, F. Capturing the Behavioural Determinants behind the Adoption of Autonomous Vehicles: Conceptual Frameworks and Measurement Models to Predict Public Transport, Sharing and Ownership Trends of Self-Driving Cars. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 349–375. [Google Scholar] [CrossRef]
- Koenig-Lewis, N.; Marquet, M.; Palmer, A.; Zhao, A.L. Enjoyment and Social Influence: Predicting Mobile Payment Adoption. Serv. Ind. J. 2015, 35, 537–554. [Google Scholar] [CrossRef]
- Teo, T.; Noyes, J. An Assessment of the Influence of Perceived Enjoyment and Attitude on the Intention to Use Technology among Pre-Service Teachers: A Structural Equation Modeling Approach. Comput. Educ. 2011, 57, 1645–1653. [Google Scholar] [CrossRef]
- Dash, G.; Paul, J. CB-SEM vs PLS-SEM Methods for Research in Social Sciences and Technology Forecasting. Technol. Forecast. Soc. Chang. 2021, 173, 121092. [Google Scholar] [CrossRef]
- Hair, J.F., Jr.; Hult, G.T.M.; Ringle, C.M.; Sarstedt, M. A Primer on Partial Least Squares Structural Equation Modeling (PLS-SEM); Sage Publications: Thousand Oaks, CA, USA, 2021; ISBN 1-5443-9633-3. [Google Scholar]
- Chin, W.W.; Newsted, P.R. Structural Equation Modeling Analysis with Small Samples Using Partial Least Squares. In Statistical Strategies for Small Sample Research; Hoyle, R.H., Ed.; Sage Publications: Thousand Oaks, CA, USA, 1999. [Google Scholar]
- Pereira, L.M.; Sanchez Rodrigues, V.; Freires, F.G. Use of Partial Least Squares Structural Equation Modeling (PLS-SEM) to Improve Plastic Waste Management. Appl. Sci. 2024, 14, 628. [Google Scholar] [CrossRef]
- Henseler, J.; Hubona, G.; Ray, P.A. Using PLS Path Modeling in New Technology Research: Updated Guidelines. Ind. Manag. Data Syst. 2016, 116, 2–20. [Google Scholar] [CrossRef]
- Sarstedt, M.; Ringle, C.M.; Smith, D.; Reams, R.; Hair, J.F. Partial Least Squares Structural Equation Modeling (PLS-SEM): A Useful Tool for Family Business Researchers. J. Fam. Bus. Strategy 2014, 5, 105–115. [Google Scholar] [CrossRef]
- Hair, J.F.; Risher, J.J.; Sarstedt, M.; Ringle, C.M. When to Use and How to Report the Results of PLS-SEM. Eur. Bus. Rev. 2019, 31, 2–24. [Google Scholar] [CrossRef]
- Chin, W.W. The Partial Least Squares Approach to Structural Equation Modeling. In Modern Methods for Business Research; Marcoulides, G.A., Ed.; Lawrence Erlbaum Associates Publishers: Mahwah, NJ, USA, 1998; Volume 295–336, pp. 295–336. [Google Scholar]
- Hair, J.F.; Ringle, C.M.; Sarstedt, M. PLS-SEM: Indeed a Silver Bullet. J. Mark. Theory Pract. 2011, 19, 139–152. [Google Scholar] [CrossRef]
- Europe’s First Cars with Level 3 Automated Driving Go on Sale in Germany—ETSC. Available online: https://etsc.eu/europes-first-cars-with-level-3-automated-driving-go-on-sale-in-germany/ (accessed on 11 September 2023).
- Technik Conditionally Automated Driving with the DRIVE PILOT. Available online: https://group.mercedes-benz.com/company/magazine/technology-innovation/easy-tech-drive-pilot.html (accessed on 4 January 2024).
- Atchley, P.; Shi, J.; Yamamoto, T. Cultural Foundations of Safety Culture: A Comparison of Traffic Safety Culture in China, Japan and the United States. Transp. Res. Part F Traffic Psychol. Behav. 2014, 26, 317–325. [Google Scholar] [CrossRef]
- Saravanos, A.; Zervoudakis, S.; Zheng, D. Extending the Technology Acceptance Model 3 to Incorporate the Phenomenon of Warm-Glow. Information 2022, 13, 429. [Google Scholar] [CrossRef]
- Lancelot Miltgen, C.; Popovič, A.; Oliveira, T. Determinants of End-User Acceptance of Biometrics: Integrating the “Big 3” of Technology Acceptance with Privacy Context. Decis. Support Syst. 2013, 56, 103–114. [Google Scholar] [CrossRef]
- Saravanos, A.; Zervoudakis, S.; Zheng, D.; Nanda, A.; Shaheen, G.; Hornat, C.; Konde Chaettle, J.; Yoda, A.; Park, H.; Ang, W. Reputation, Risk, and Trust on User Adoption of Internet Search Engines: The Case of DuckDuckGo. In Proceedings of the HCI International 2022—Late Breaking Posters, Virtual, 26 June–1 July 2022; Stephanidis, C., Antona, M., Ntoa, S., Salvendy, G., Eds.; Springer Nature: Cham, Switzerland, 2022; pp. 683–691. [Google Scholar]
- Saravanos, A.; Verni, O.; Moore, I.; Sall, A.; Arriaza, J.; Jivani, S.; Bennett, A.; Li, S.; Zheng, D.; Zervoudakis, S. Investigating End-User Acceptance of Last-Mile Delivery by Autonomous Vehicles in the United States; Springer Nature: Cham, Switzerland, 2022; pp. 519–532. [Google Scholar]
- Hino, H. Assessing Factors Affecting Consumers’ Intention to Adopt Biometric Authentication Technology in e-Shopping. J. Internet Commer. 2015, 14, 1–20. [Google Scholar] [CrossRef]
- Milošević, M.R.; Milošević, D.M.; Stanojević, A.D.; Stević, D.M.; Simjanović, D.J. Fuzzy and Interval AHP Approaches in Sustainable Management for the Architectural Heritage in Smart Cities. Mathematics 2021, 9, 304. [Google Scholar] [CrossRef]
- Andrés-Sánchez, J.D.; Puchades, L.G.-V. Combining fsQCA and PLS-SEM to Assess Policyholders’ Attitude towards Life Settlements. Eur. Res. Manag. Bus. Econ. 2023, 29, 100220. [Google Scholar] [CrossRef]
- Albahri, A.S.; Alnoor, A.; Zaidan, A.A.; Albahri, O.S.; Hameed, H.; Zaidan, B.B.; Peh, S.S.; Zain, A.B.; Siraj, S.B.; Masnan, A.H.B.; et al. Hybrid Artificial Neural Network and Structural Equation Modelling Techniques: A Survey. Complex Intell. Syst. 2022, 8, 1781–1801. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
| Factor | Definition |
|---|---|
| Behavioral Intention (BI) | “refers to a person’s subjective probability that he will perform some behavior” [27] |
| Effort Expectancy (EE) | “the degree of ease associated with consumers’ use of technology” [28] |
| Facilitating Conditions (FC) | “consumers’ perceptions of the resources and support available to perform a behavior” [28] |
| Hedonic Motivation (HM) | “the fun or pleasure derived from using a technology” [28] |
| Performance Expectancy (PE) | “the degree to which using a technology will provide benefits to consumers in performing certain activities” [28] |
| Social Influence (SI) | “the extent to which consumers perceive that important others (e.g., family and friends) believe they should use a particular technology” [28] |
| Factor | Item | Loading | t-Statistic |
|---|---|---|---|
| BI | BI1 | 0.901 | 79.921 * |
| BI2 | 0.822 | 30.404 * | |
| BI3 | 0.818 | 30.770 * | |
| BI4 | 0.879 | 54.441 * | |
| BI5 | 0.876 | 60.069 * | |
| EE | EE1 | 0.884 | 64.781 * |
| EE2 | 0.840 | 35.557 * | |
| EE3 | 0.870 | 52.995 * | |
| FC | FC1 | 0.722 | 12.592 * |
| FC2 | 0.764 | 23.882 * | |
| FC3 | 0.799 | 30.599 * | |
| FC4 | 0.711 | 14.744 * | |
| HM | HM1 | 0.881 | 48.141 * |
| HM2 | 0.865 | 38.603 * | |
| HM3 | 0.887 | 61.355 * | |
| PE | PE1 | 0.802 | 25.477 * |
| PE2 | 0.829 | 33.571 * | |
| PE3 | 0.809 | 32.128 * | |
| PE4 | 0.853 | 42.323 * | |
| PE5 | 0.874 | 53.694 * | |
| SI | SI1 | 0.898 | 73.199 * |
| SI2 | 0.894 | 55.268 * | |
| SI3 | 0.905 | 67.324 * | |
| SI4 | 0.863 | 62.717 * |
| Factor | Number of Items | Cronbach’s Alpha | Composite Reliability |
|---|---|---|---|
| BI | 5 | 0.911 | 0.934 |
| EE | 3 | 0.832 | 0.899 |
| FC | 4 | 0.740 | 0.837 |
| HM | 3 | 0.851 | 0.910 |
| PE | 5 | 0.890 | 0.919 |
| SI | 4 | 0.913 | 0.938 |
| Factor | Number of Items | AVE |
|---|---|---|
| BI | 5 | 0.739 |
| EE | 3 | 0.748 |
| FC | 4 | 0.562 |
| HM | 3 | 0.770 |
| PE | 5 | 0.695 |
| SI | 4 | 0.792 |
| Factor | BI | EE | FC | HM | PE | SI |
|---|---|---|---|---|---|---|
| BI | 0.860 | |||||
| EE | 0.597 | 0.865 | ||||
| FC | 0.438 | 0.623 | 0.750 | |||
| HM | 0.772 | 0.606 | 0.514 | 0.878 | ||
| PE | 0.809 | 0.645 | 0.528 | 0.818 | 0.834 | |
| SI | 0.859 | 0.477 | 0.337 | 0.667 | 0.750 | 0.890 |
| Factor | R2 | Adjusted-R2 |
|---|---|---|
| BI | 0.881 | 0.851 |
| EE | 0.510 | 0.506 |
| FC | 0.114 | 0.111 |
| HM | 0.538 | 0.535 |
| PE | 0.773 | 0.771 |
| Path | β (Direct) | t-Statistic (Direct) | β (Total) | t-Statistic (Total) |
|---|---|---|---|---|
| EE → BI | 0.121 | 1.711 | 0.160 | 2.098 * |
| EE → PE | 0.154 | 2.559 * | 0.154 | 2.559 * |
| FC → BI | 0.011 | 0.178 | 0.150 | 2.588 ** |
| FC → EE | 0.425 | 5.705 ** | 0.522 | 8.684 ** |
| FC → HM | 0.326 | 6.363 ** | 0.326 | 6.363 ** |
| FC → PE | 0.083 | 1.709 | 0.310 | 5.573 ** |
| HM → BI | −0.008 | 0.082 | 0.155 | 1.968 * |
| HM → EE | 0.298 | 3.093 ** | 0.298 | 3.093 ** |
| HM → PE | 0.449 | 7.272 ** | 0.495 | 8.628 ** |
| PE → BI | 0.255 | 2.288 * | 0.255 | 2.288 * |
| SI → BI | 0.566 | 5.840 ** | 0.814 | 13.096 ** |
| SI → EE | 0.135 | 2.048 * | 0.477 | 7.960 ** |
| SI → FC | 0.337 | 5.201 ** | 0.337 | 5.201 ** |
| SI → HM | 0.556 | 10.628 ** | 0.665 | 15.601 ** |
| SI → PE | 0.349 | 7.599 ** | 0.750 | 22.893 ** |
| Path | β (Direct) | t-Statistic (Direct) | β (Total) | t-Statistic (Total) |
|---|---|---|---|---|
| AGE → BI | 0.027 | 0.982 | 0.027 | 0.982 |
| AGE × EE → BI | −0.039 | 0.720 | −0.039 | 0.720 |
| AGE × FC → BI | 0.000 | 0.011 | 0.000 | 0.011 |
| AGE × HM → BI | 0.100 | 1.356 | 0.100 | 1.356 |
| AGE × PE → BI | 0.004 | 0.053 | 0.004 | 0.053 |
| AGE × SI → BI | −0.039 | 0.720 | −0.039 | 0.720 |
| Path | β (Direct) | t-Statistic (Direct) | β (Total) | t-Statistic (Total) |
|---|---|---|---|---|
| EXP1 → BI | 0.162 | 0.843 | 0.162 | 0.843 |
| EXP1 × EE → BI | −0.042 | 0.145 | −0.042 | 0.145 |
| EXP1 × FC → BI | −0.177 | 0.686 | −0.177 | 0.686 |
| EXP1 × HM → BI | −0.042 | 0.110 | −0.042 | 0.110 |
| EXP1 × PE → BI | 0.468 | 1.089 | 0.468 | 1.089 |
| EXP1 × SI → BI | −0.218 | 0.605 | −0.218 | 0.605 |
| EXP2 → BI | −0.112 | 0.495 | −0.112 | 0.495 |
| EXP2 × EE → BI | −0.109 | 0.325 | −0.109 | 0.325 |
| EXP2 × FC → BI | −0.164 | 0.546 | −0.164 | 0.546 |
| EXP2 × HM → BI | 0.238 | 0.641 | 0.238 | 0.641 |
| EXP2 × PE → BI | 0.444 | 0.872 | 0.444 | 0.872 |
| EXP2 × SI → BI | −0.144 | 0.457 | −0.144 | 0.457 |
| EXP3 → BI | 0.082 | 0.462 | 0.082 | 0.462 |
| EXP3 × EE → BI | 0.178 | 0.789 | 0.178 | 0.789 |
| EXP3 × FC → BI | 0.020 | 0.082 | 0.020 | 0.082 |
| EXP3 × HM → BI | −0.372 | 1.016 | −0.372 | 1.016 |
| EXP3 × PE → BI | −0.235 | 0.630 | −0.235 | 0.630 |
| EXP3 × SI → BI | 0.340 | 0.911 | 0.340 | 0.911 |
| EXP4 → BI | 0.365 | 1.277 | 0.365 | 1.277 |
| EXP4 × EE → BI | −0.145 | 0.401 | −0.145 | 0.401 |
| EXP4 × FC → BI | 0.189 | 0.547 | 0.189 | 0.547 |
| EXP4 × HM → BI | −0.490 | 0.969 | −0.490 | 0.969 |
| EXP4 × PE → BI | 0.000 | 0.000 | 0.000 | 0.000 |
| EXP4 × SI → BI | −0.002 | 0.003 | −0.002 | 0.003 |
| EXP5 → BI | 0.043 | 0.206 | 0.043 | 0.206 |
| EXP5 × EE → BI | −0.003 | 0.009 | −0.003 | 0.009 |
| EXP5 × FC → BI | 0.143 | 0.482 | 0.143 | 0.482 |
| EXP5 × HM → BI | 0.386 | 0.866 | 0.386 | 0.866 |
| EXP5 × PE → BI | −0.686 | 1.337 | −0.686 | 1.337 |
| EXP5 × SI → BI | −0.048 | 0.112 | −0.048 | 0.112 |
| EXP6 → BI | 0.041 | 0.203 | 0.041 | 0.203 |
| EXP6 × EE → BI | 0.218 | 0.741 | 0.218 | 0.741 |
| EXP6 × FC → BI | 0.133 | 0.509 | 0.133 | 0.509 |
| EXP6 × HM → BI | −0.013 | 0.038 | −0.013 | 0.038 |
| EXP6 × PE → BI | −0.381 | 0.675 | −0.381 | 0.675 |
| EXP6 × SI → BI | −0.223 | 0.464 | −0.223 | 0.464 |
| EXP7 → BI | −0.089 | 0.575 | −0.089 | 0.575 |
| EXP7 × EE → BI | 0.087 | 0.315 | 0.087 | 0.315 |
| EXP7 × FC → BI | 0.123 | 0.494 | 0.123 | 0.494 |
| EXP7 × HM → BI | 0.364 | 1.174 | 0.364 | 1.174 |
| EXP7 × PE → BI | −0.325 | 0.816 | −0.325 | 0.816 |
| EXP7 × SI → BI | −0.065 | 0.491 | −0.065 | 0.491 |
| EXP8 → BI | −0.028 | 0.162 | −0.028 | 0.162 |
| EXP8 × EE → BI | −0.257 | 1.305 | −0.257 | 1.305 |
| EXP8 × FC → BI | 0.371 | 1.772 | 0.371 | 1.772 |
| EXP8 × HM → BI | −0.110 | 0.477 | −0.110 | 0.477 |
| EXP8 × PE → BI | −0.071 | 0.480 | −0.071 | 0.480 |
| EXP8 × SI → BI | −0.117 | 0.390 | −0.117 | 0.390 |
| EXP9 → BI | −0.235 | 0.714 | −0.235 | 0.714 |
| EXP9 × EE → BI | −0.036 | 0.126 | −0.036 | 0.126 |
| EXP9 × FC → BI | −0.070 | 0.149 | −0.070 | 0.149 |
| EXP9 × HM → BI | 0.681 | 1.153 | 0.681 | 1.153 |
| EXP9 × PE → BI | −0.124 | 0.178 | −0.124 | 0.178 |
| EXP9 × SI → BI | 0.043 | 0.206 | 0.043 | 0.206 |
| Path | β (Direct) | t-Statistic (Direct) | β (Total) | t-Statistic (Total) |
|---|---|---|---|---|
| GENDER → BI | −0.018 | 0.330 | −0.018 | 0.330 |
| GENDER × EE → BI | −0.073 | 0.667 | −0.073 | 0.667 |
| GENDER × FC → BI | 0.044 | 0.468 | 0.044 | 0.468 |
| GENDER × HM → BI | 0.357 | 2.622 * | 0.357 | 2.622 * |
| GENDER × PE → BI | −0.225 | 1.517 | −0.225 | 1.517 |
| GENDER × SI → BI | −0.018 | 0.33 | −0.018 | 0.330 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saravanos, A.; Pissadaki, E.K.; Singh, W.S.; Delfino, D. Gauging Public Acceptance of Conditionally Automated Vehicles in the United States. Smart Cities 2024, 7, 913-931. https://doi.org/10.3390/smartcities7020038
Saravanos A, Pissadaki EK, Singh WS, Delfino D. Gauging Public Acceptance of Conditionally Automated Vehicles in the United States. Smart Cities. 2024; 7(2):913-931. https://doi.org/10.3390/smartcities7020038
Chicago/Turabian StyleSaravanos, Antonios, Eleftheria K. Pissadaki, Wayne S. Singh, and Donatella Delfino. 2024. "Gauging Public Acceptance of Conditionally Automated Vehicles in the United States" Smart Cities 7, no. 2: 913-931. https://doi.org/10.3390/smartcities7020038
APA StyleSaravanos, A., Pissadaki, E. K., Singh, W. S., & Delfino, D. (2024). Gauging Public Acceptance of Conditionally Automated Vehicles in the United States. Smart Cities, 7(2), 913-931. https://doi.org/10.3390/smartcities7020038