


Inclusive MicroMob: Enhancing Urban Mobility Through Micromobility Solutions
 , , , , , , , and
, , , , , , , and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
Highlights
- What are the main findings?
- Interdisciplinary approach: this project combined urban analysis, experiments in the urban context, and participatory processes to evaluate the impact of micromobility.
- Integration of an innovative micromobility device: this study introduced Genny Zero, a self-balancing micromobility vehicle, to assess its feasibility in real urban environments.
- What is the implication of the main finding?
- Identification of conflicts and synergies: this research investigated potential conflicts with pedestrians and vehicles, while also demonstrating synergies with existing cycling infrastructure and public transport.
- Policy and infrastructure recommendations: this study underscores the need for adaptive regulations, multimodal integration to ensure safe and efficient micromobility adoption, and guidelines for participatory processes.
Abstract
1. Introduction
State of the Art: Micromobility
2. Method and Materials
2.1. The Interdisciplinary Approach
2.2. Comparison of Swiss and Ticino Regulations on Micromobility
- They must adhere to the traffic regulations for bicycles;
- They are required to use bike lanes when available;
- They are prohibited from operating in pedestrian areas;
- Their use is permitted from the age of 14 with an M-class (or G-class) license and without a license from the age of 16, except for fast e-bikes;
- Helmet use is recommended and mandatory for fast e-bikes;
- Segways, fast e-bikes, and motorized wheelchairs (except those with speeds under 10 km/h) must have a control plate.
2.3. Genny Zero
- Minimum weight: 50 kg, maximum weight: 110 kg
- Maximum power: 2000 W
- Maximum speed: 15 km/h
- Maximum incline: 20%
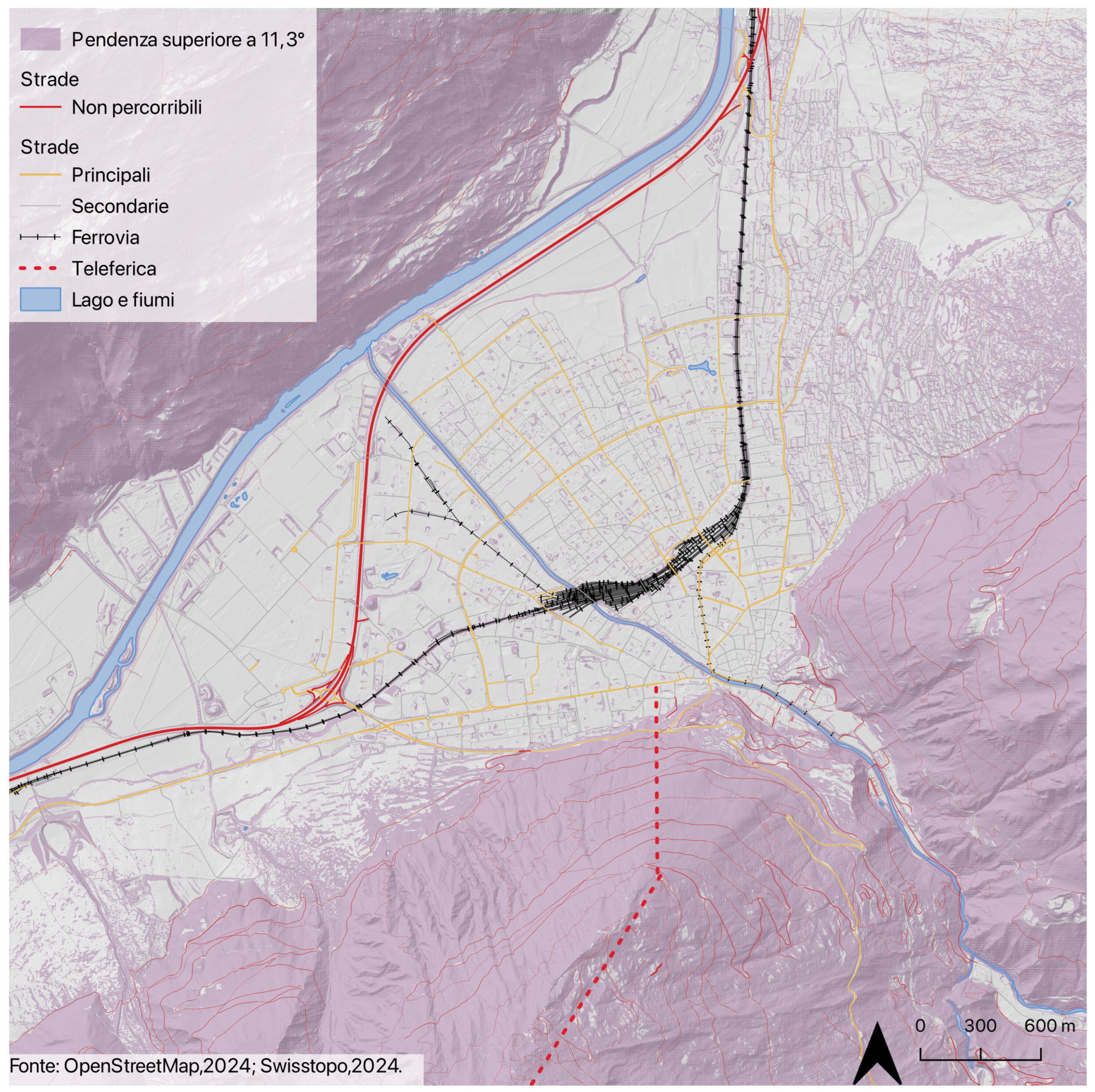
2.4. Data Collection: Urban Analysis
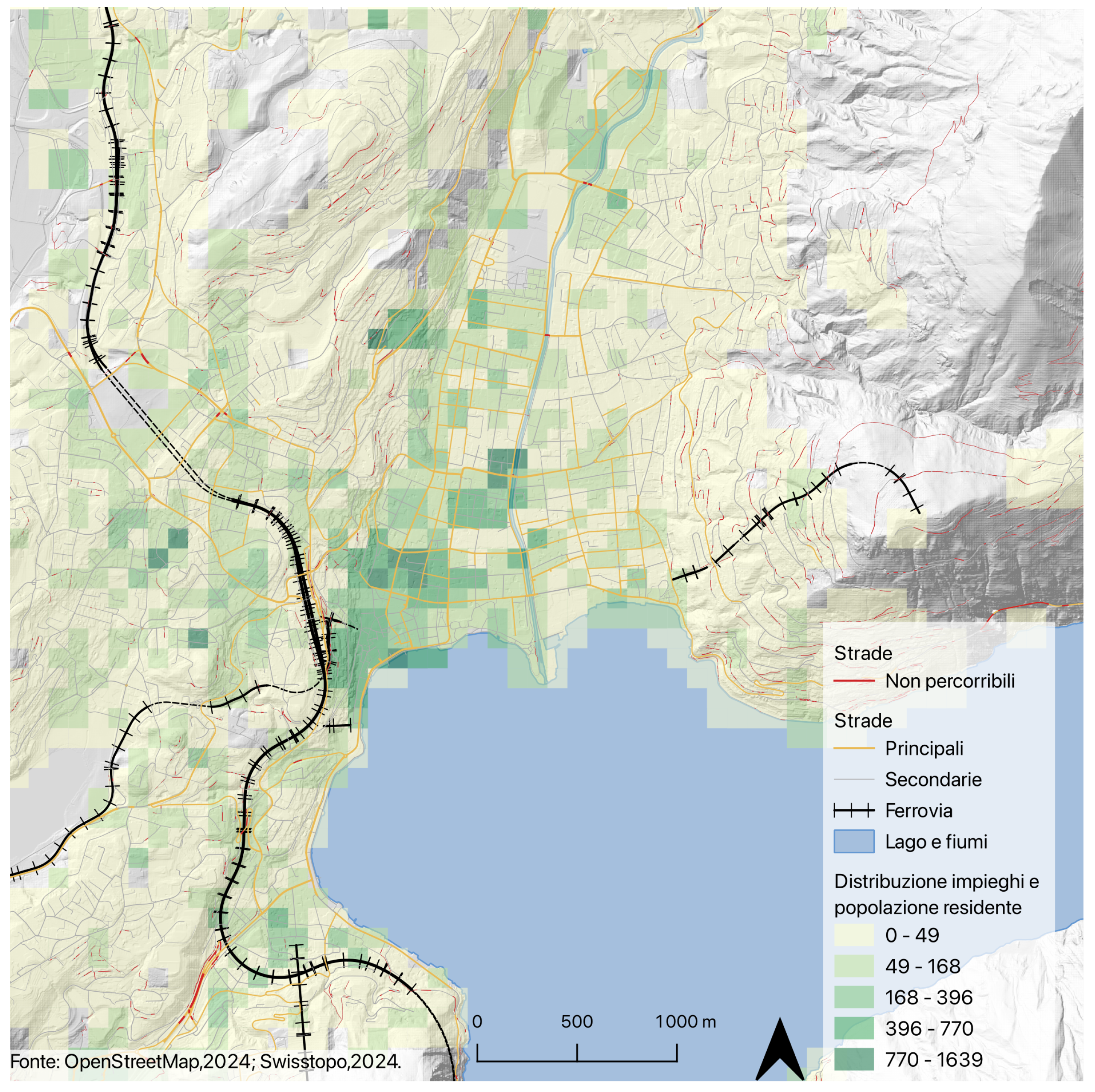
- Existing supply and demand: evaluated through an analysis of the resident population and total job opportunities.
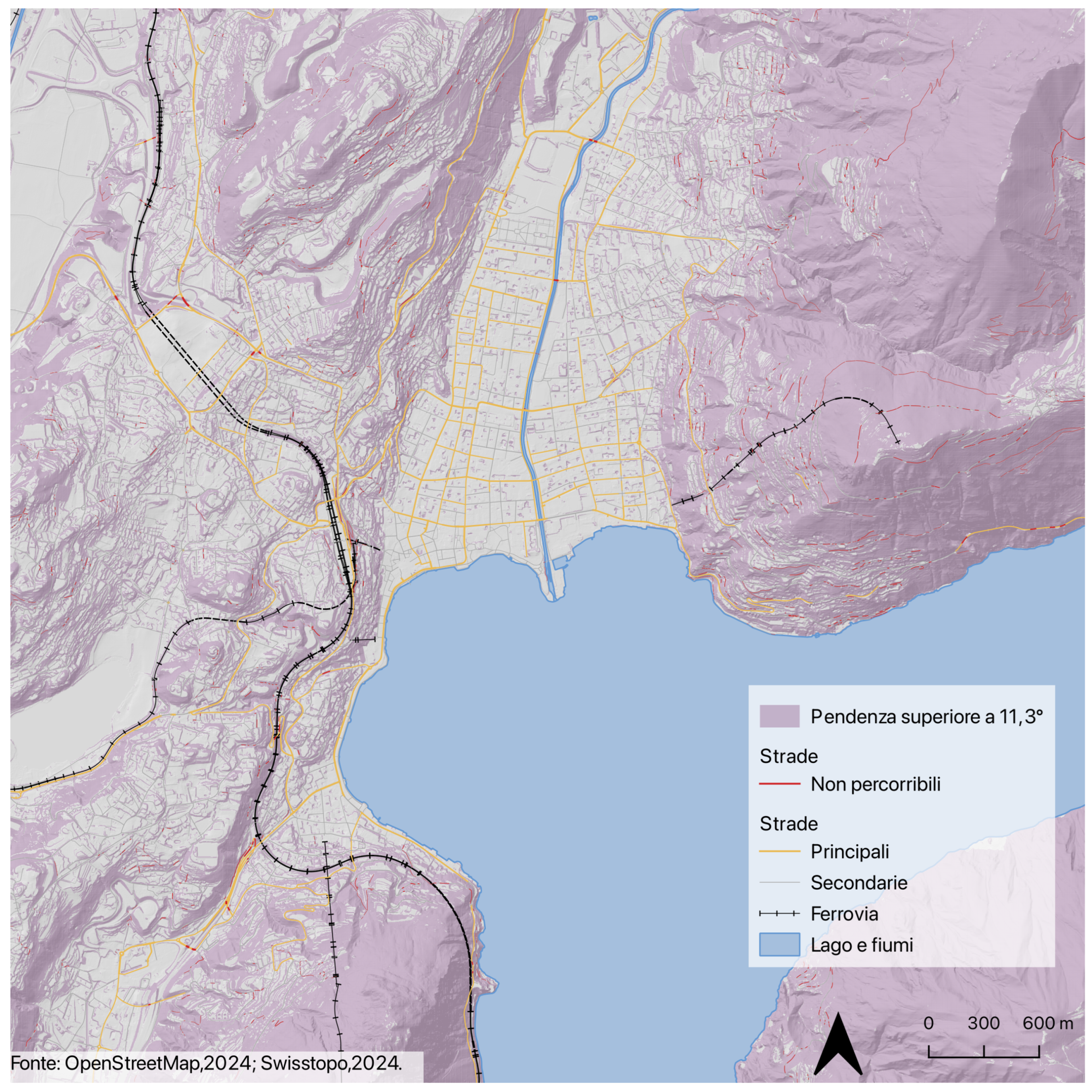
- Street gradients: the Genny Zero device is suitable for slopes with a maximum gradient of 20%, equivalent to approximately 11.3 degrees. Roads were categorized as either accessible (gradient below 11.3°) or requiring exchange points or alternative solutions (gradient above 11.3°).
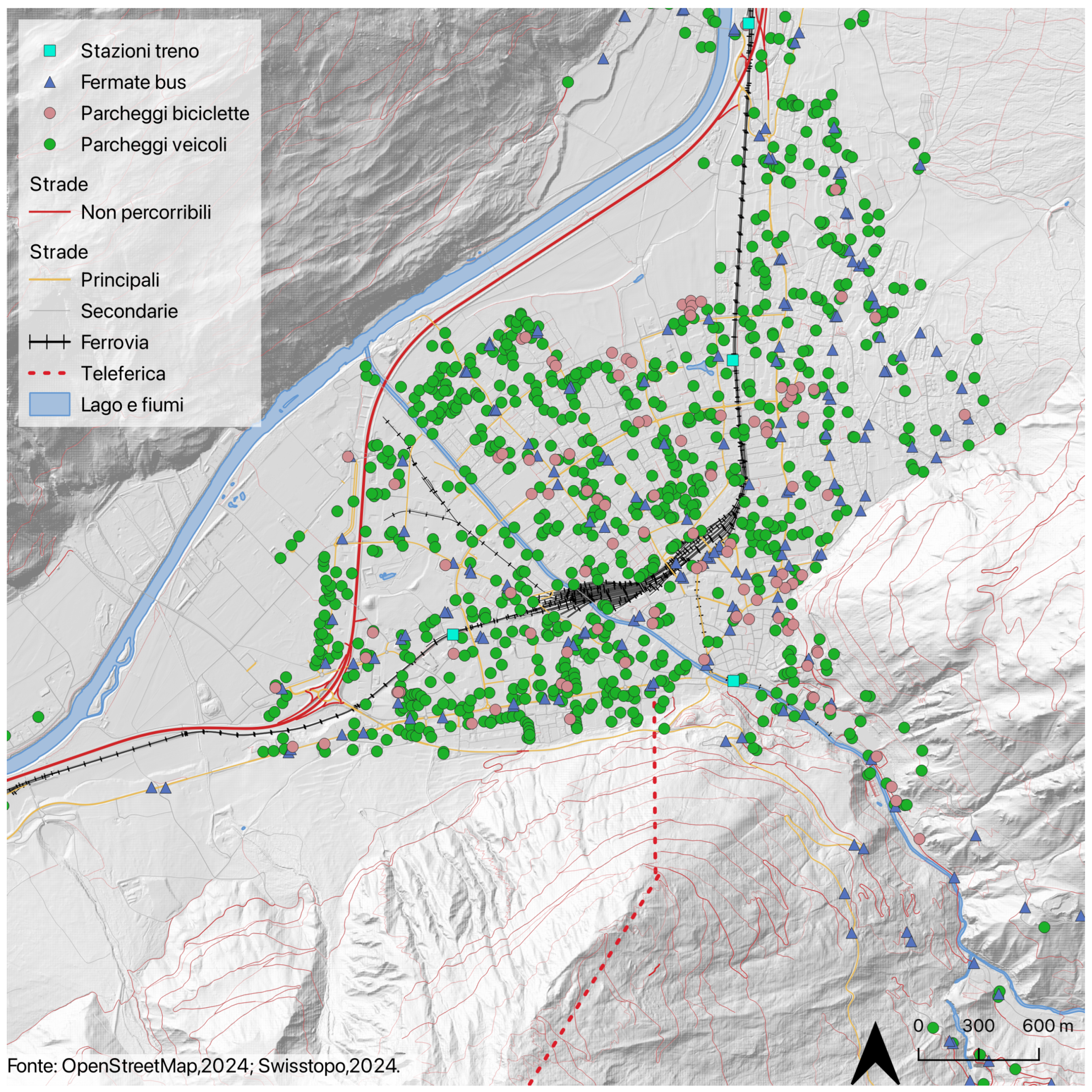
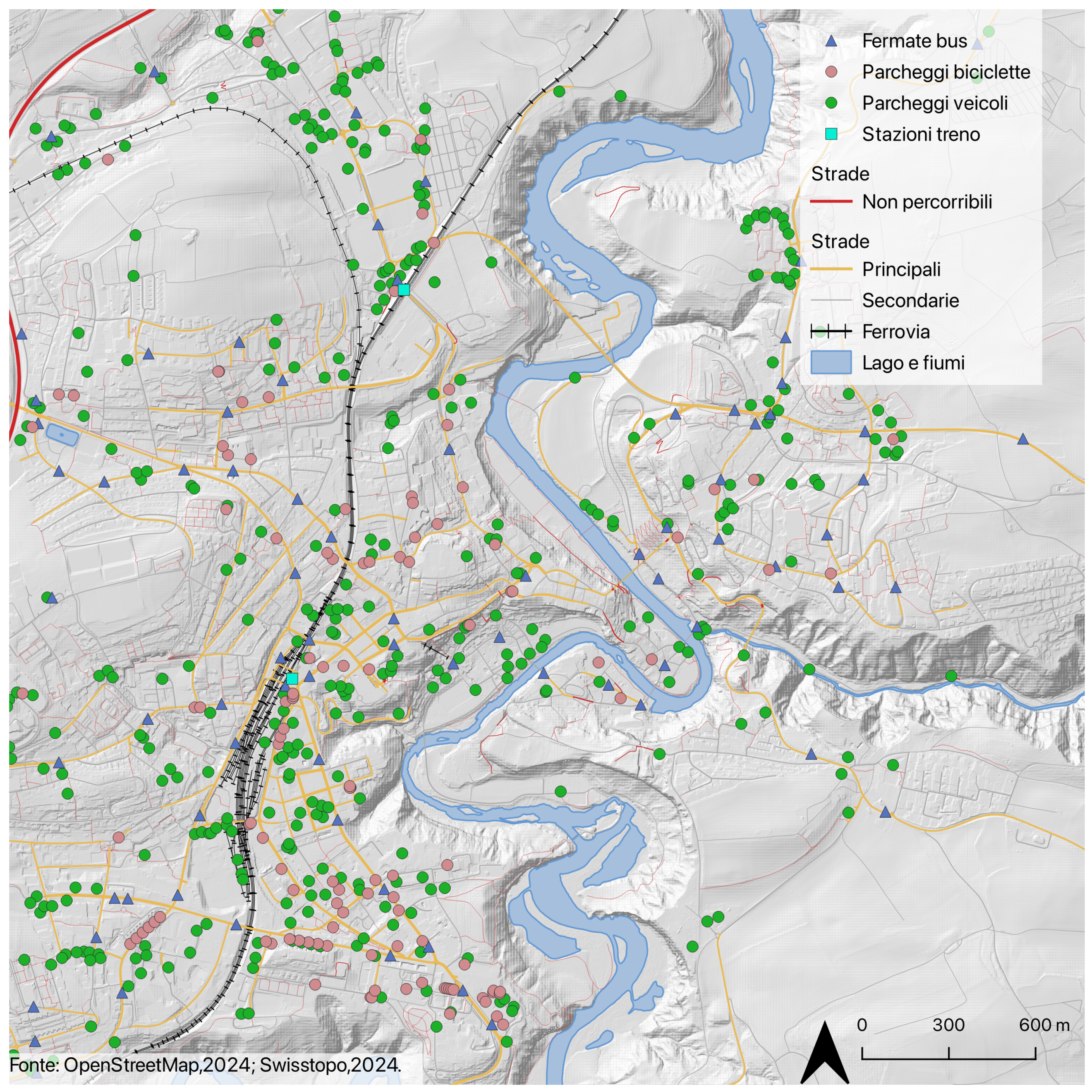
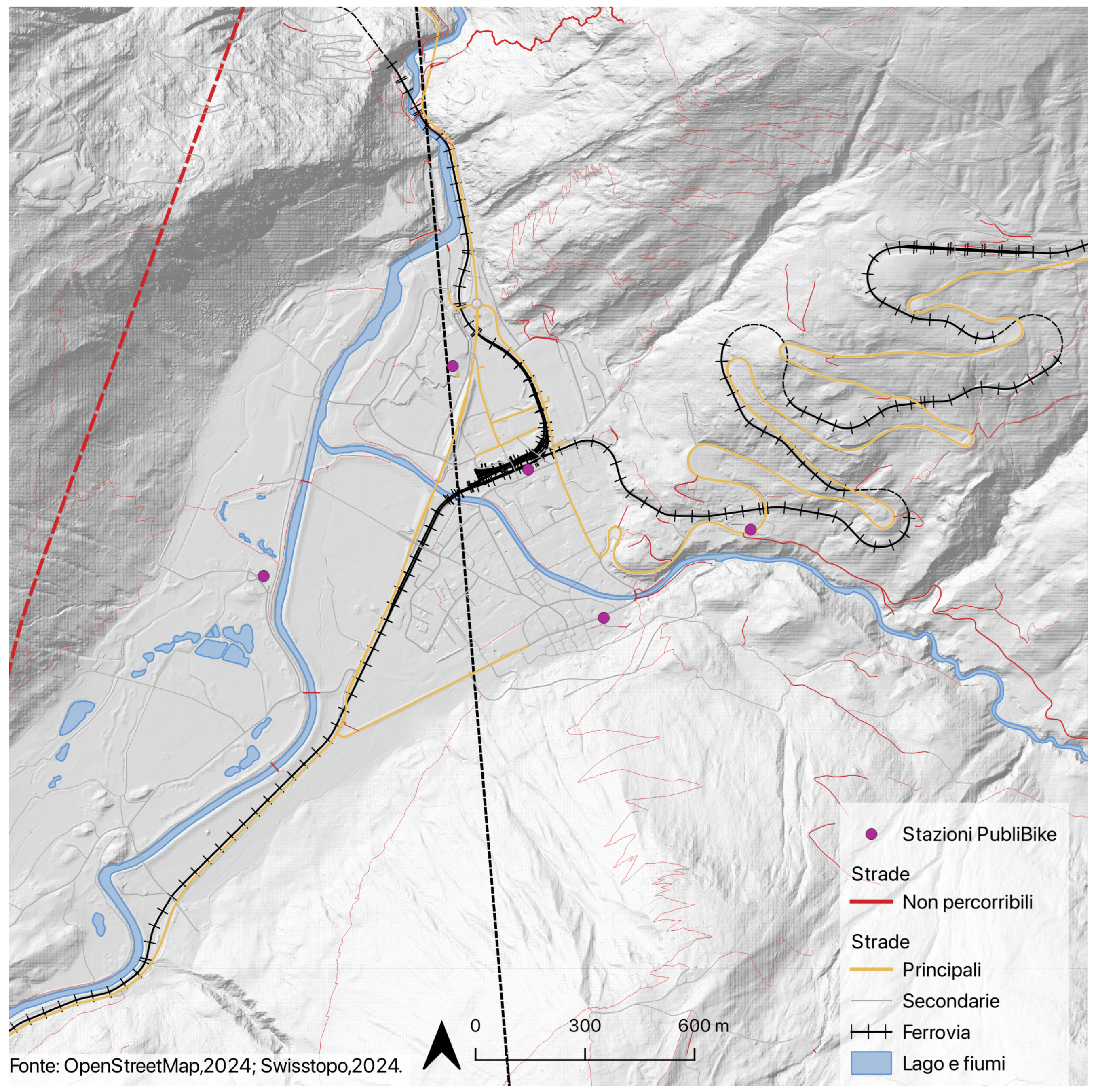
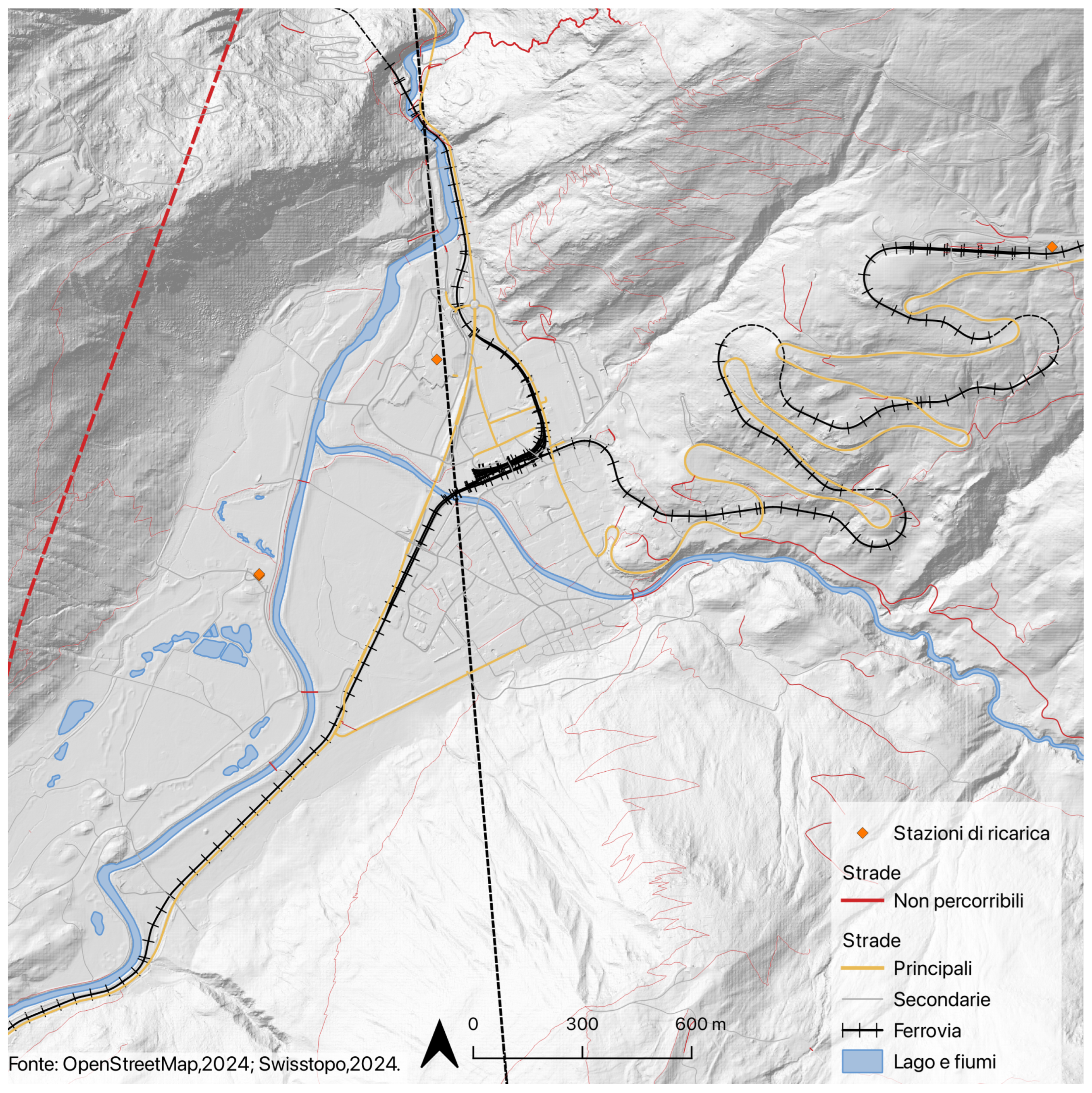
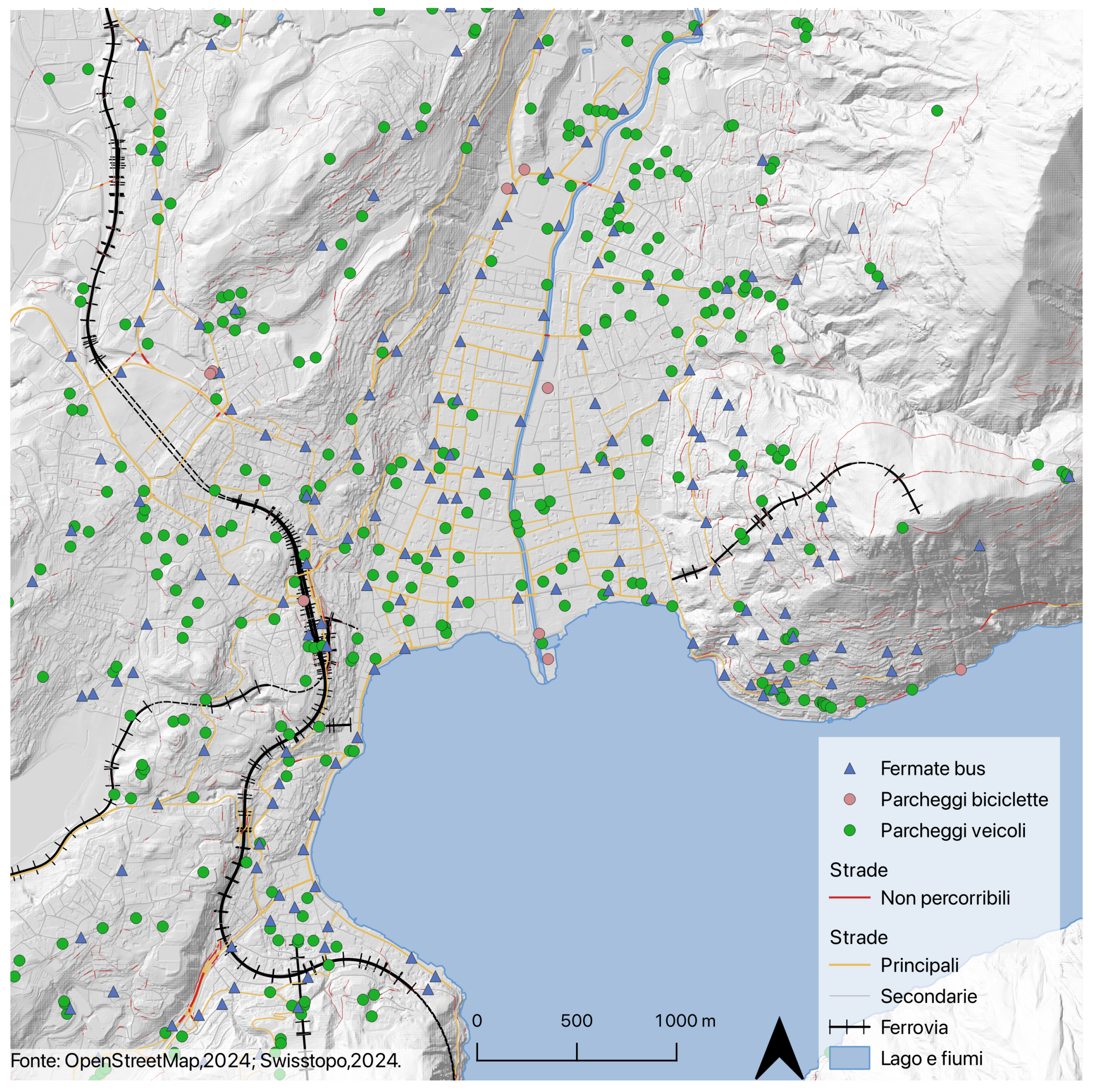
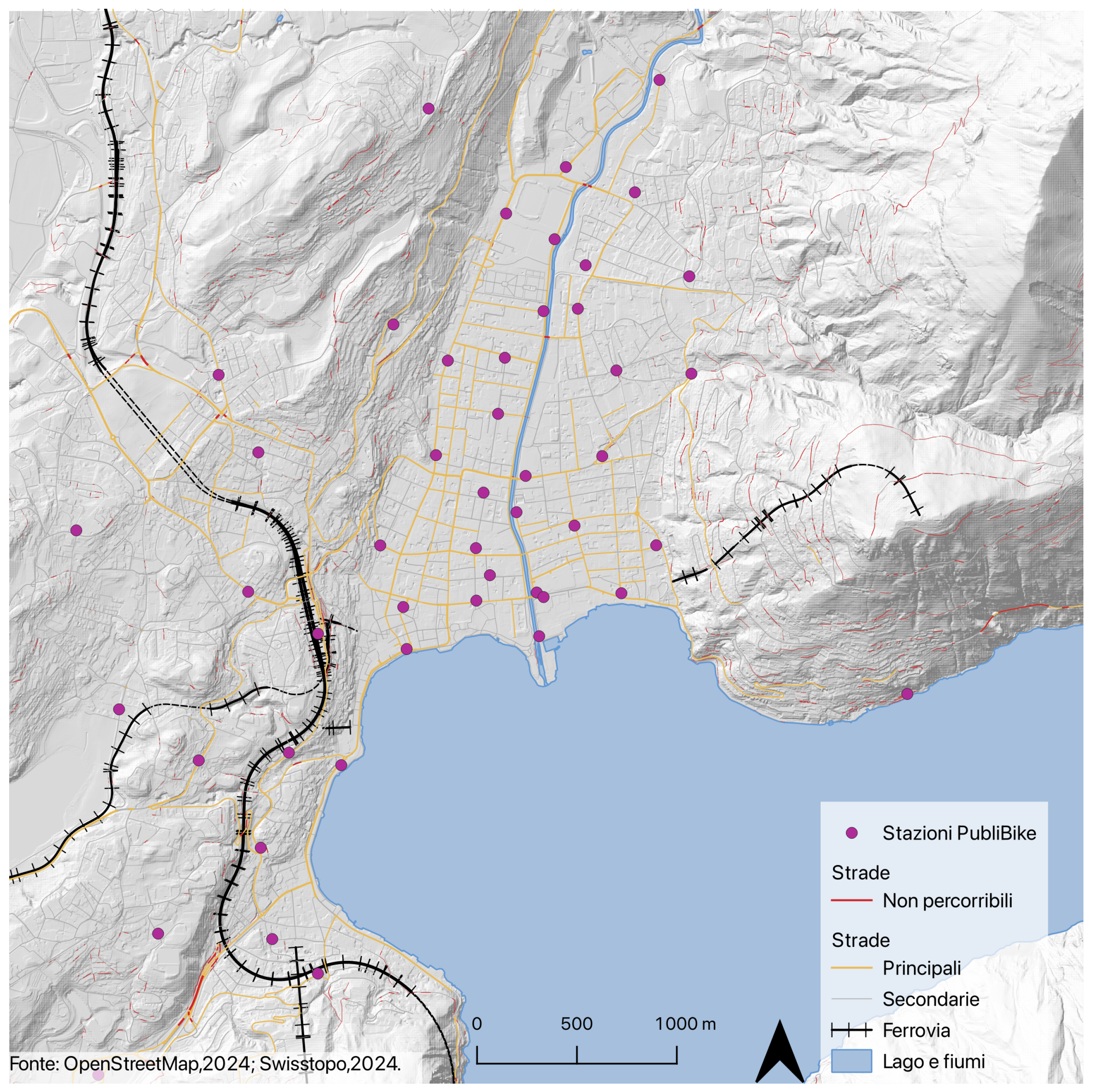
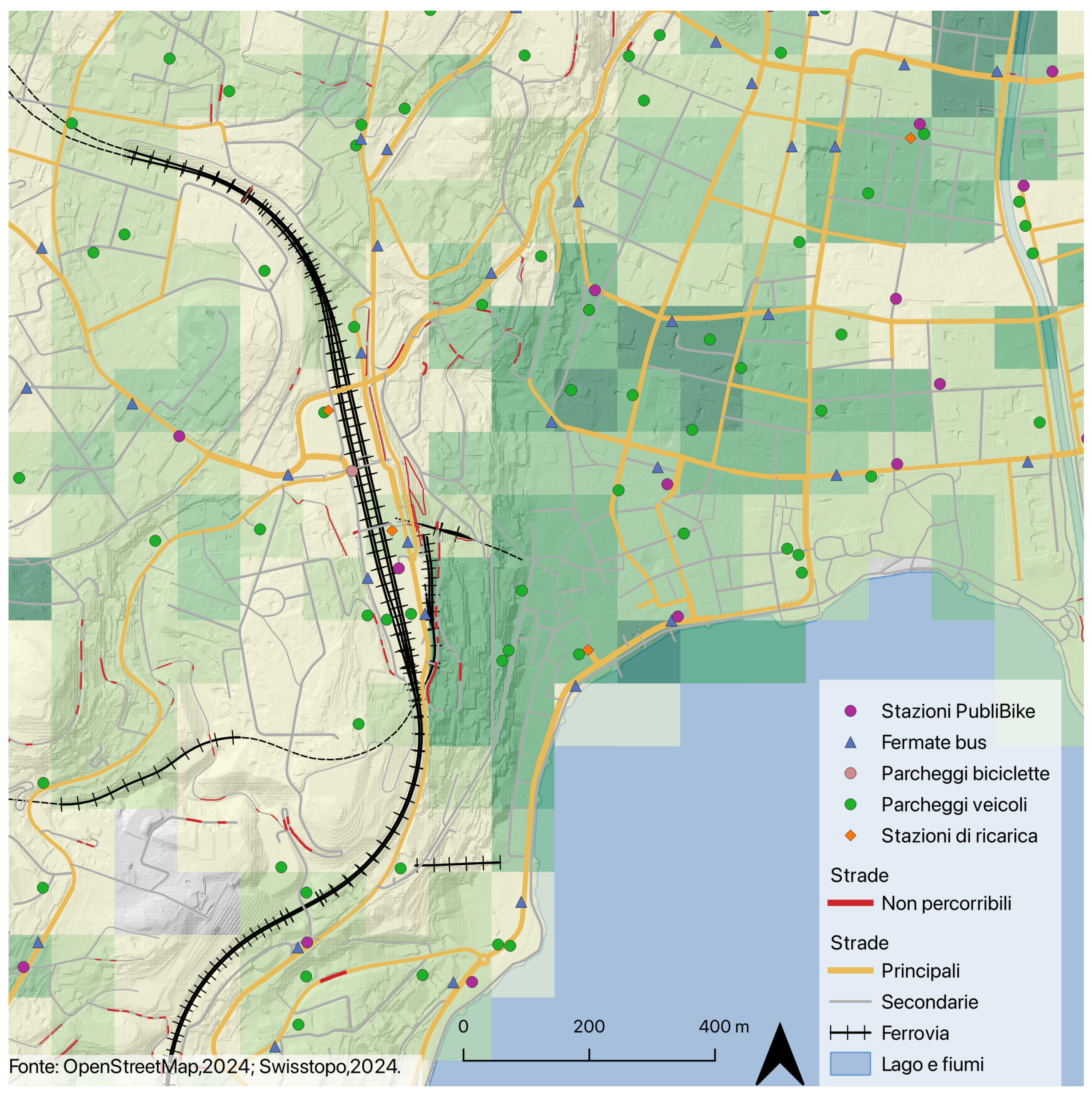
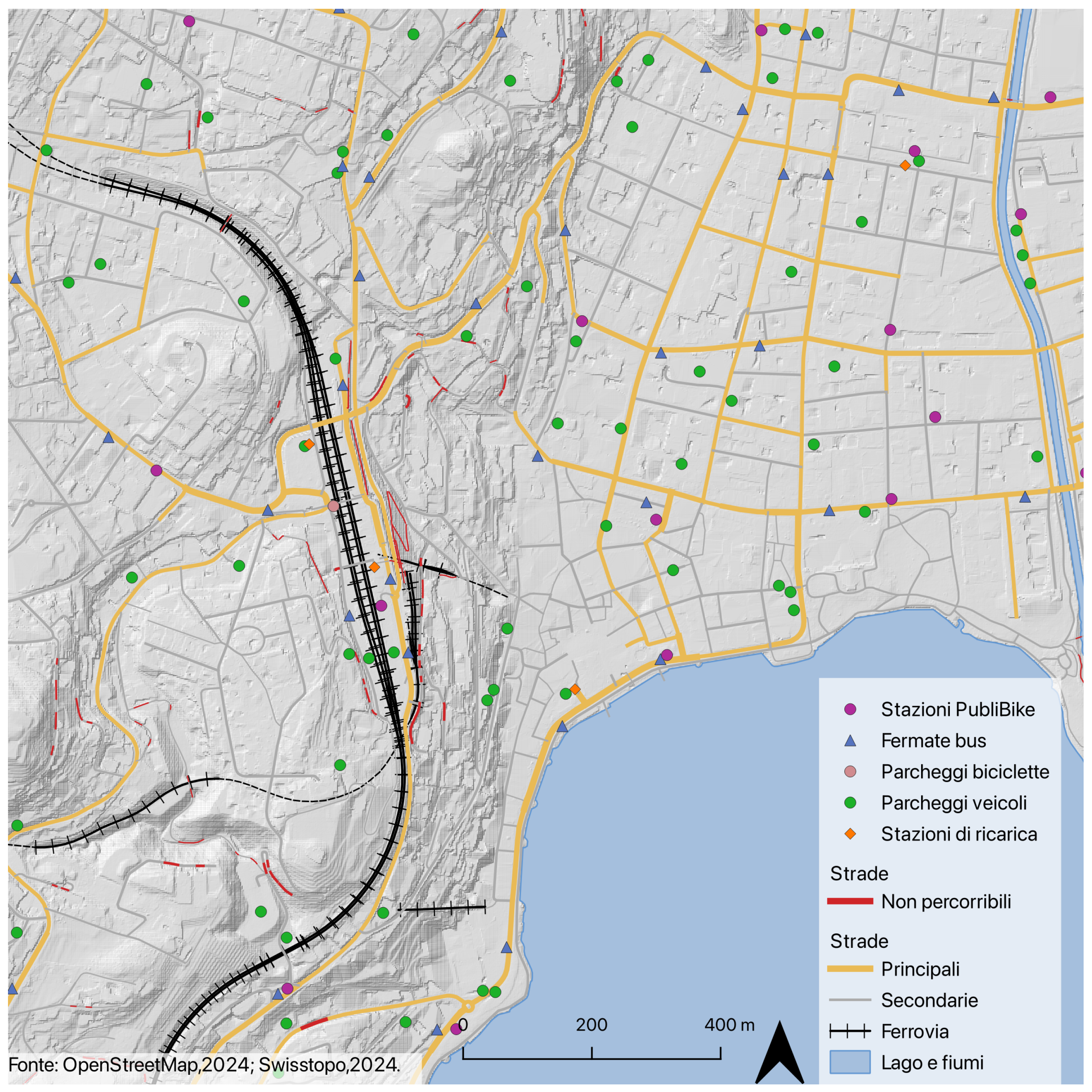
- Public facilities: local public transport systems, parking areas, railway stations, bike-sharing systems, and charging stations were mapped to evaluate potential integration with micromobility devices like Genny Zero.
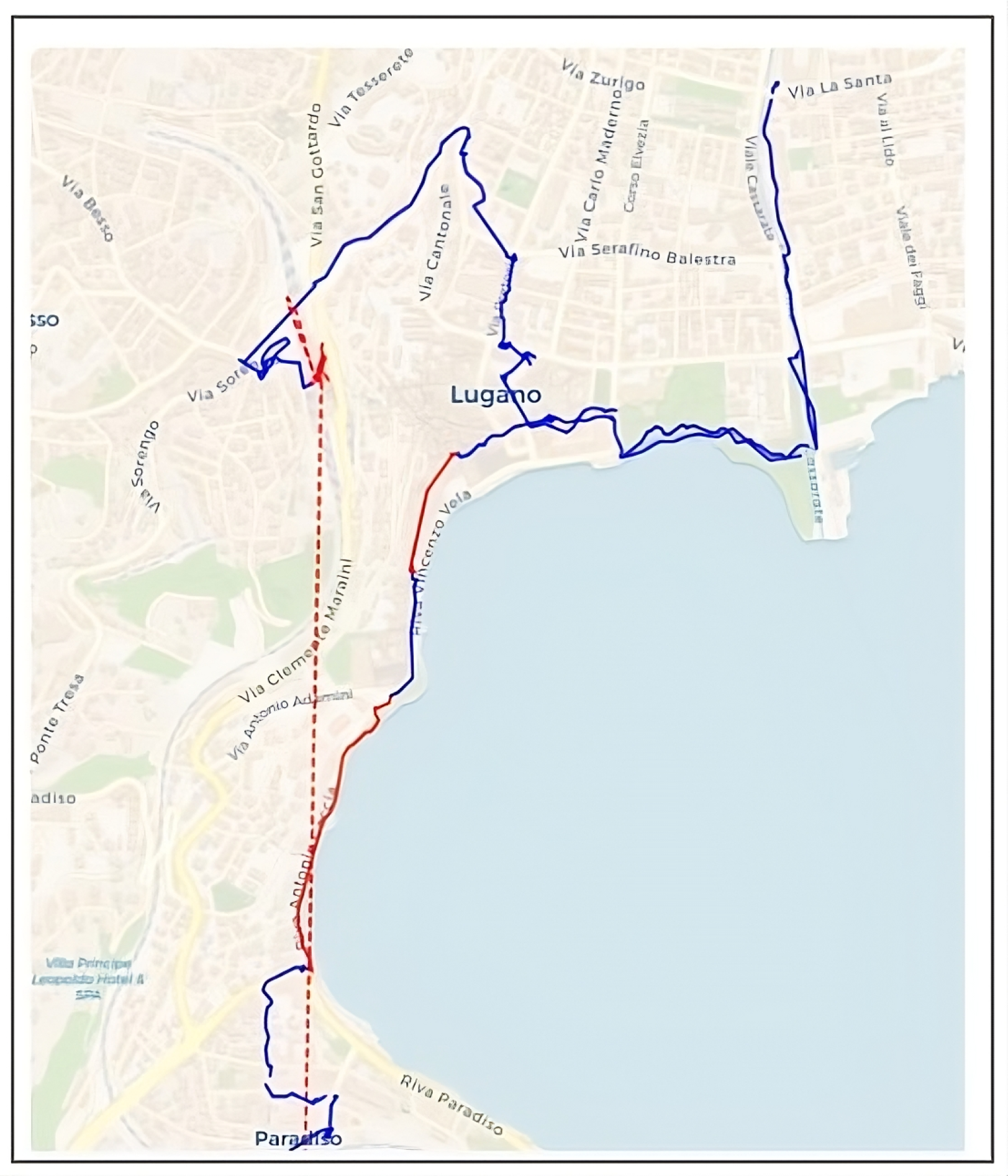
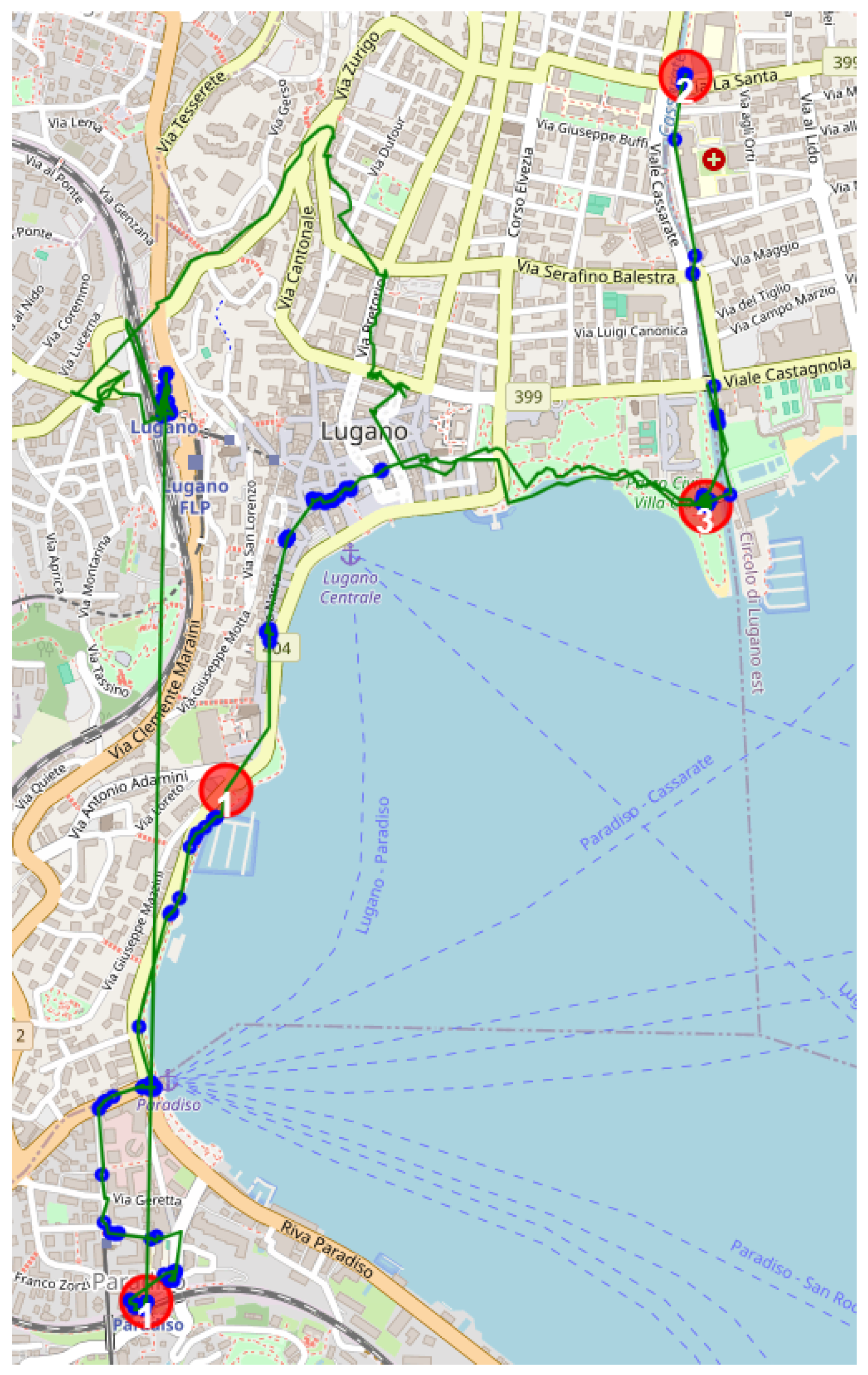
2.5. Data Collection: Urban Experiment
Methods and Mathematical Reference Models
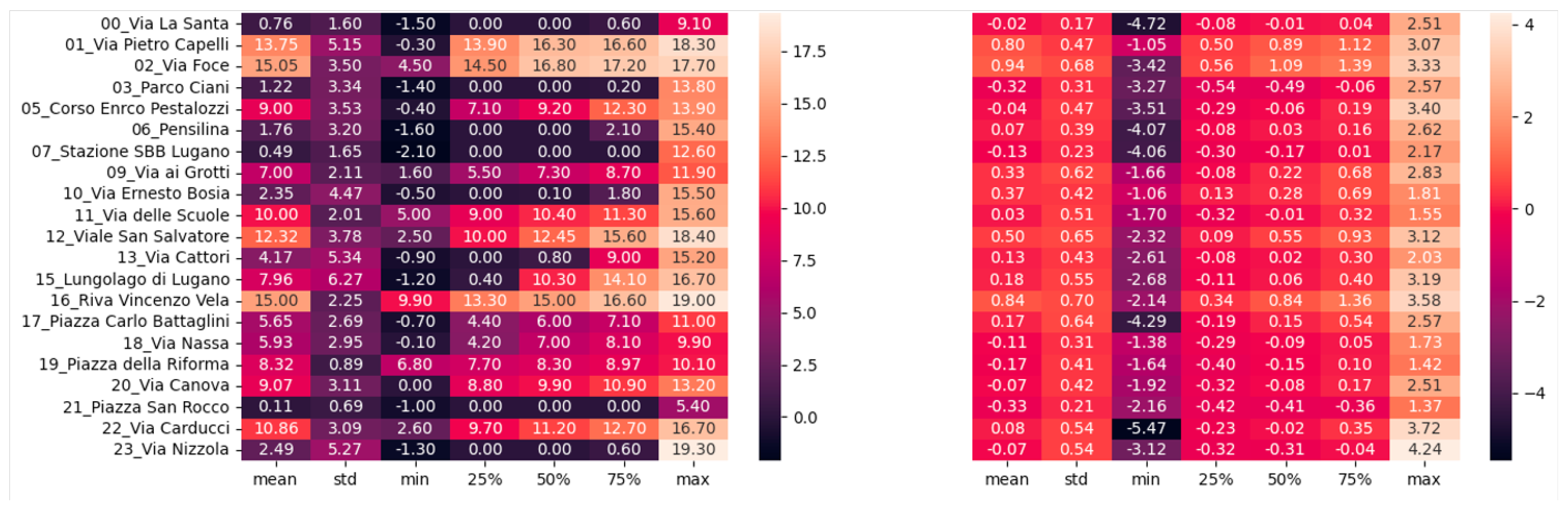
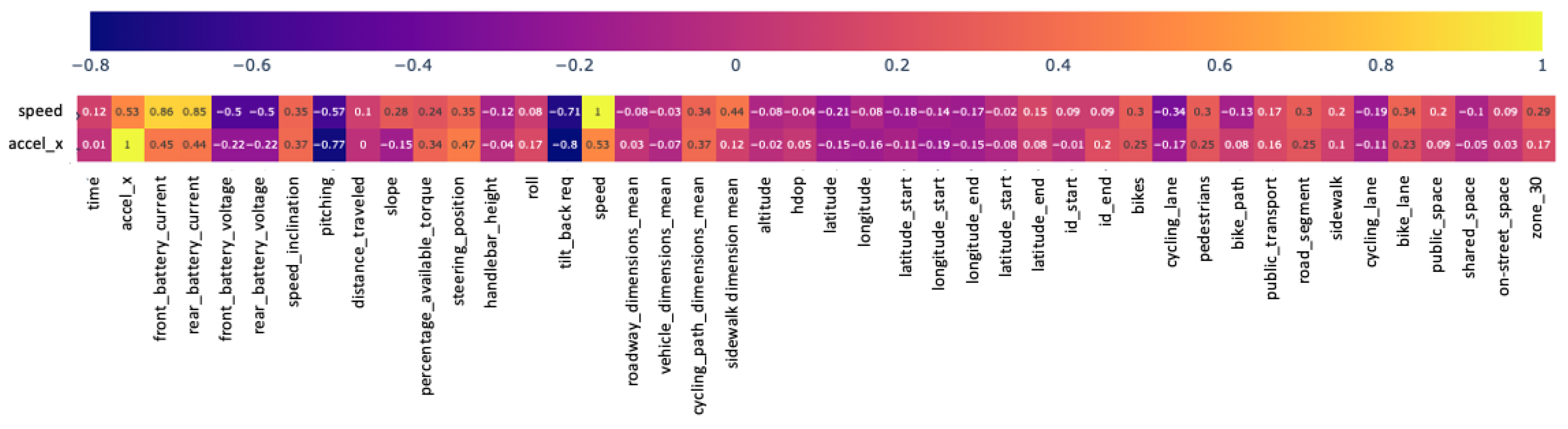
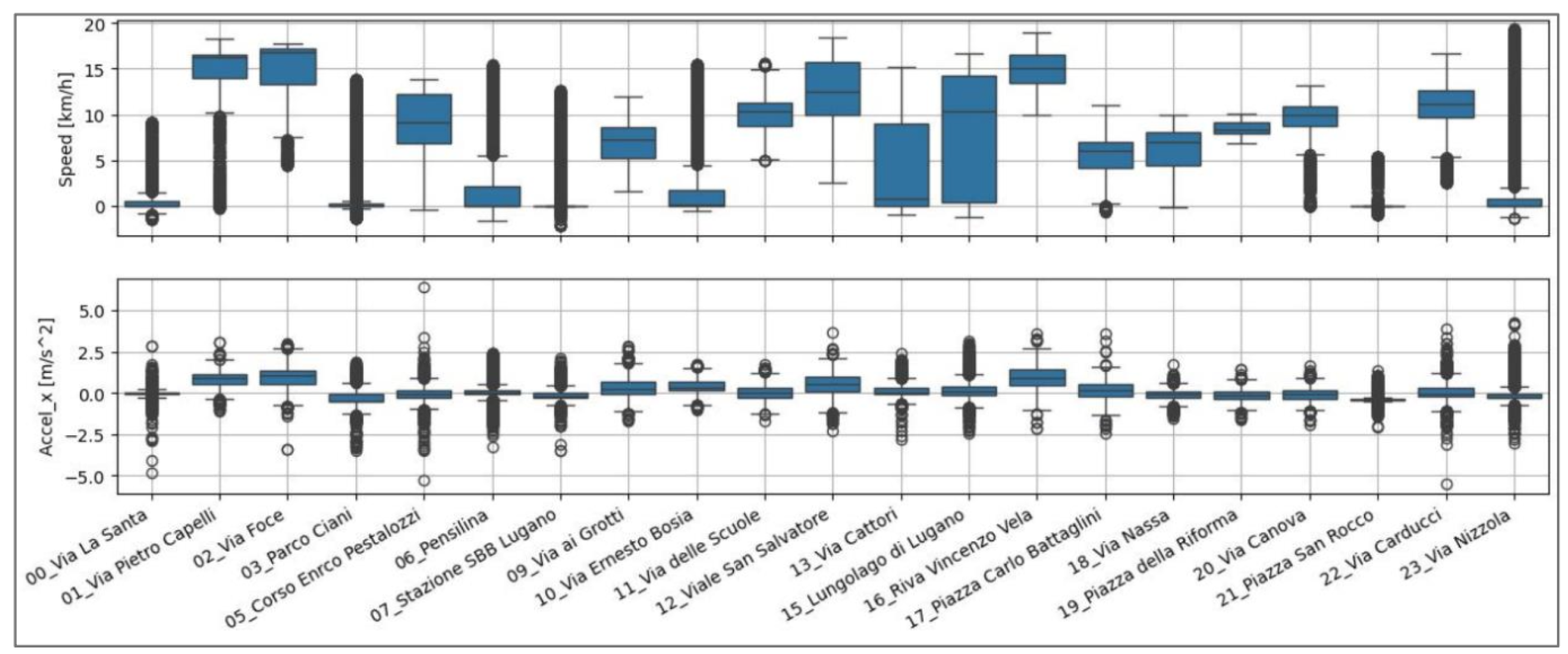
- Analysis of most impactful road characteristicsAn analytical study on machine collected data was performed to identify the road characteristics which have the highest impact on the vehicle’s speed and acceleration, based on the result of a supervised machine learning model prediction.As a first step, a preliminary statistical and correlation analysis was performed over the collected machine data (univariate correlation). In particular, we used the following statistical metrics as relevant for the present study:
- -
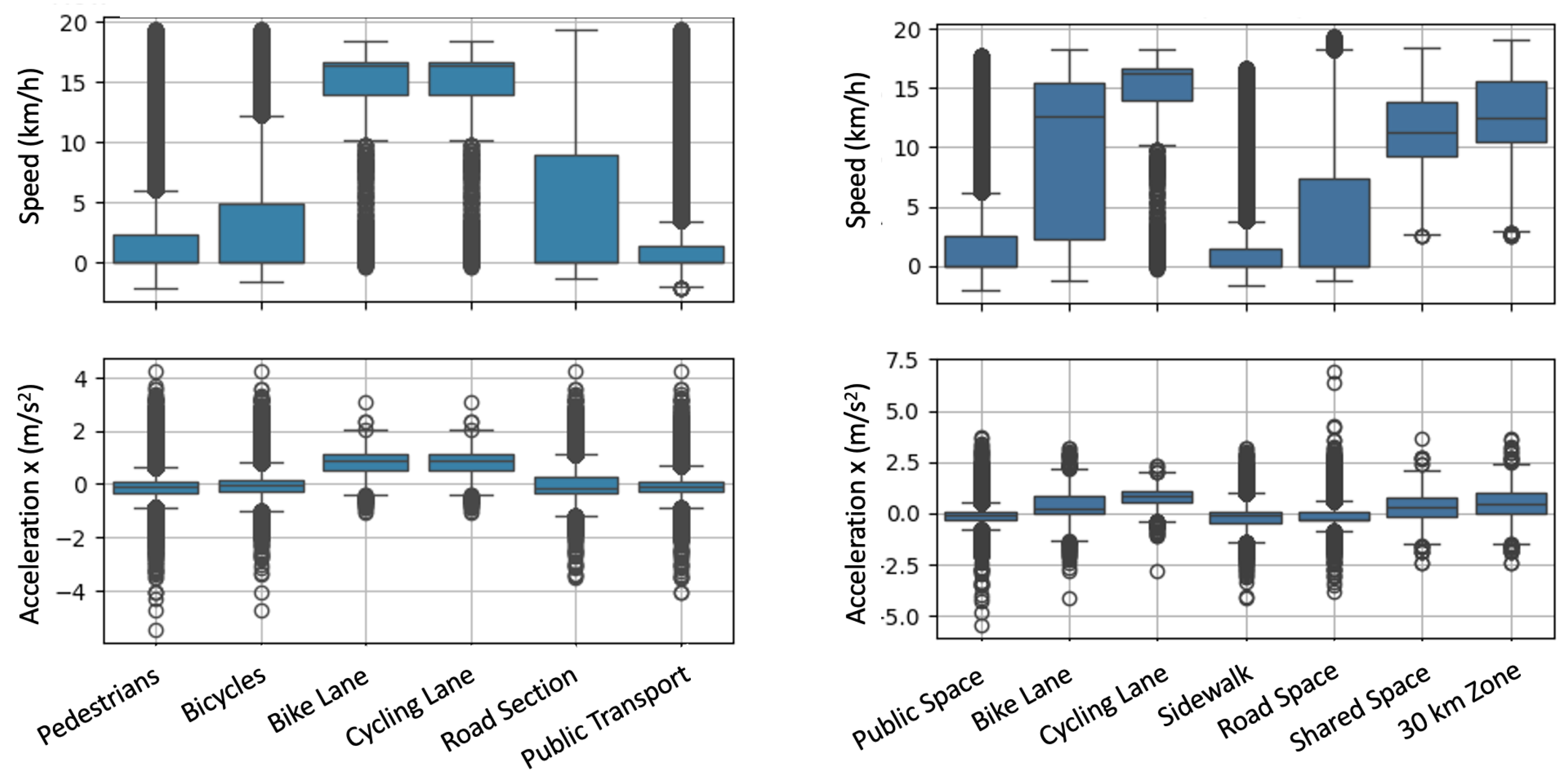
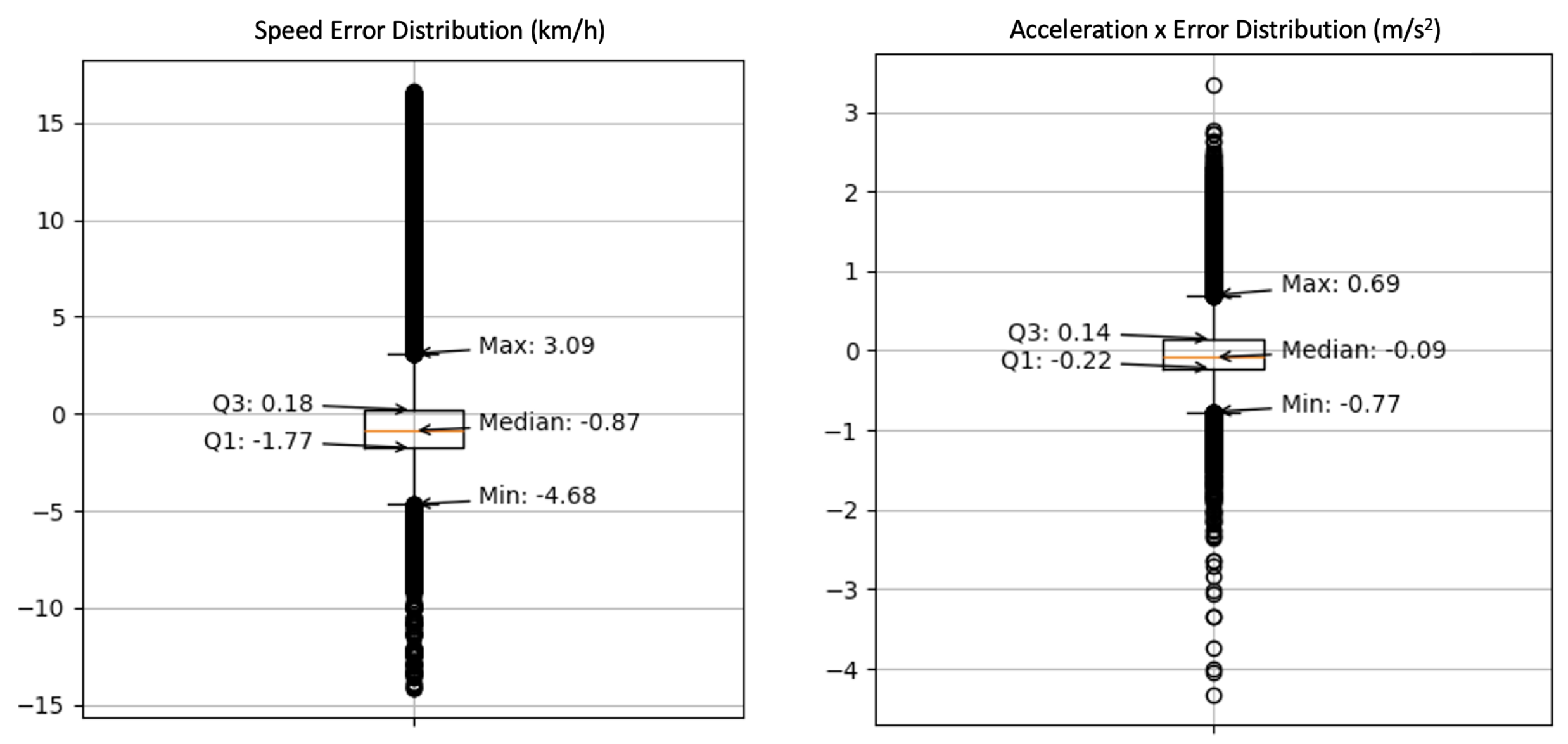
- Mean, standard deviation, minimum, maximum, and the 25th, 50th and 75th percentiles for the speed and forward acceleration distributions (Figure 3);
- -
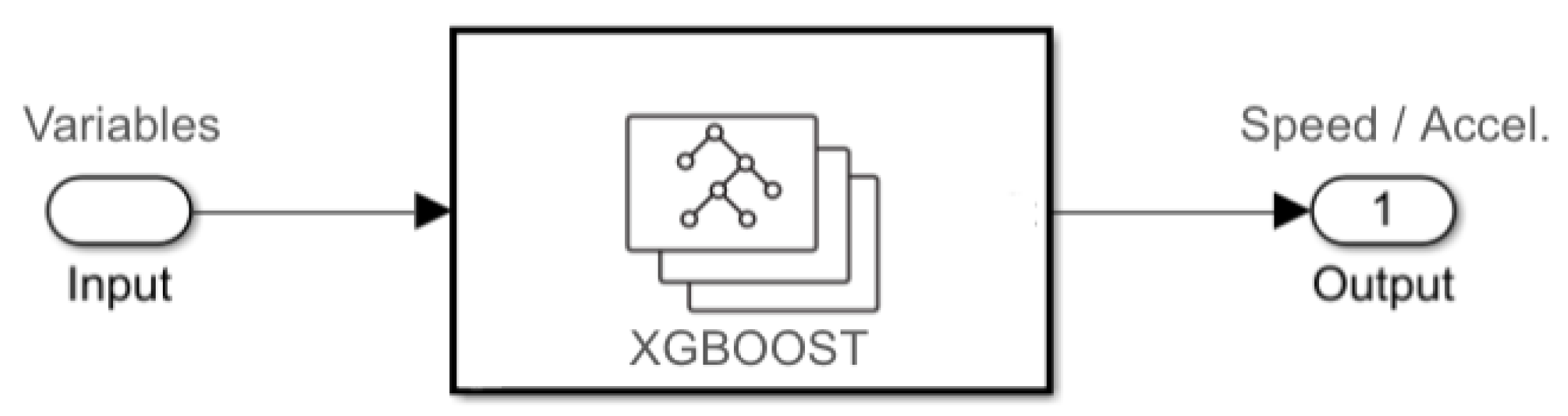
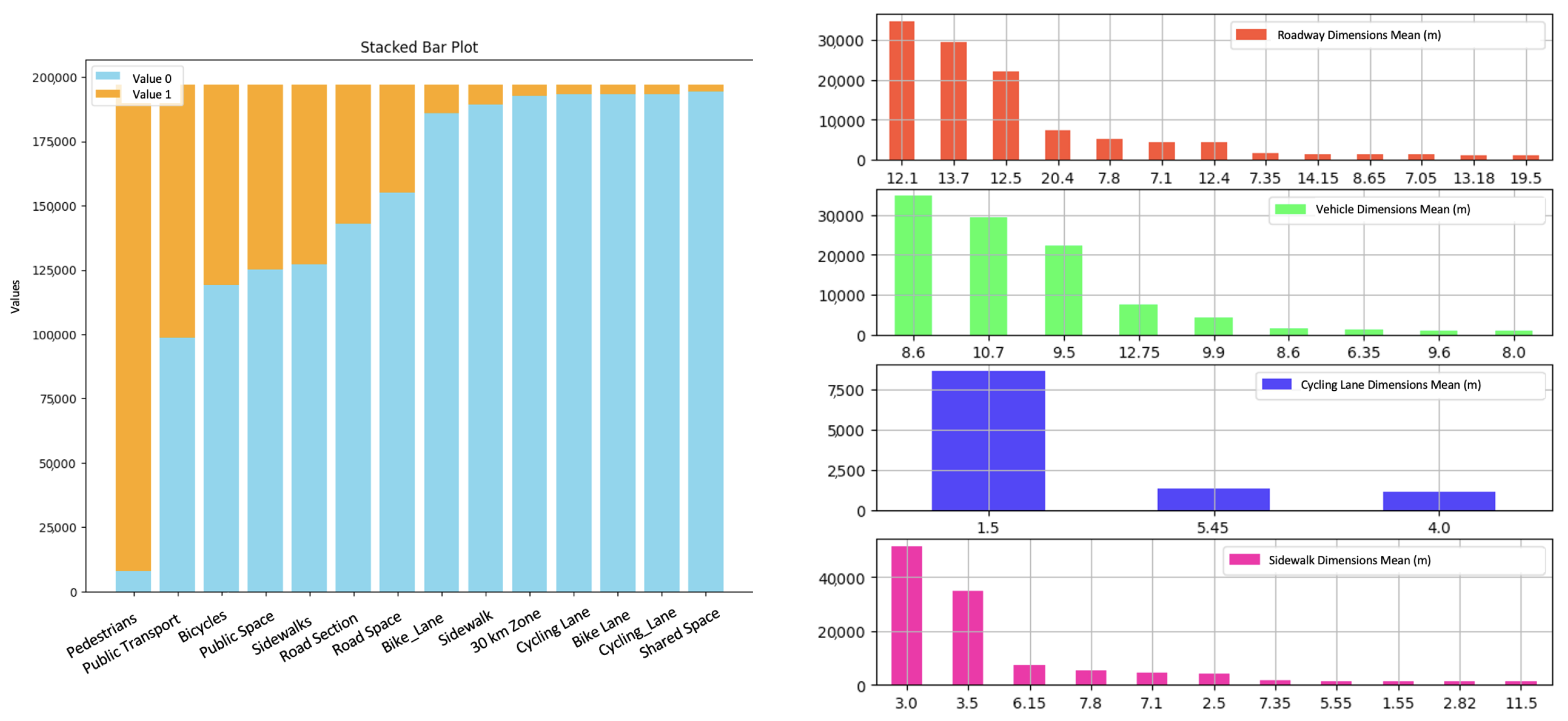
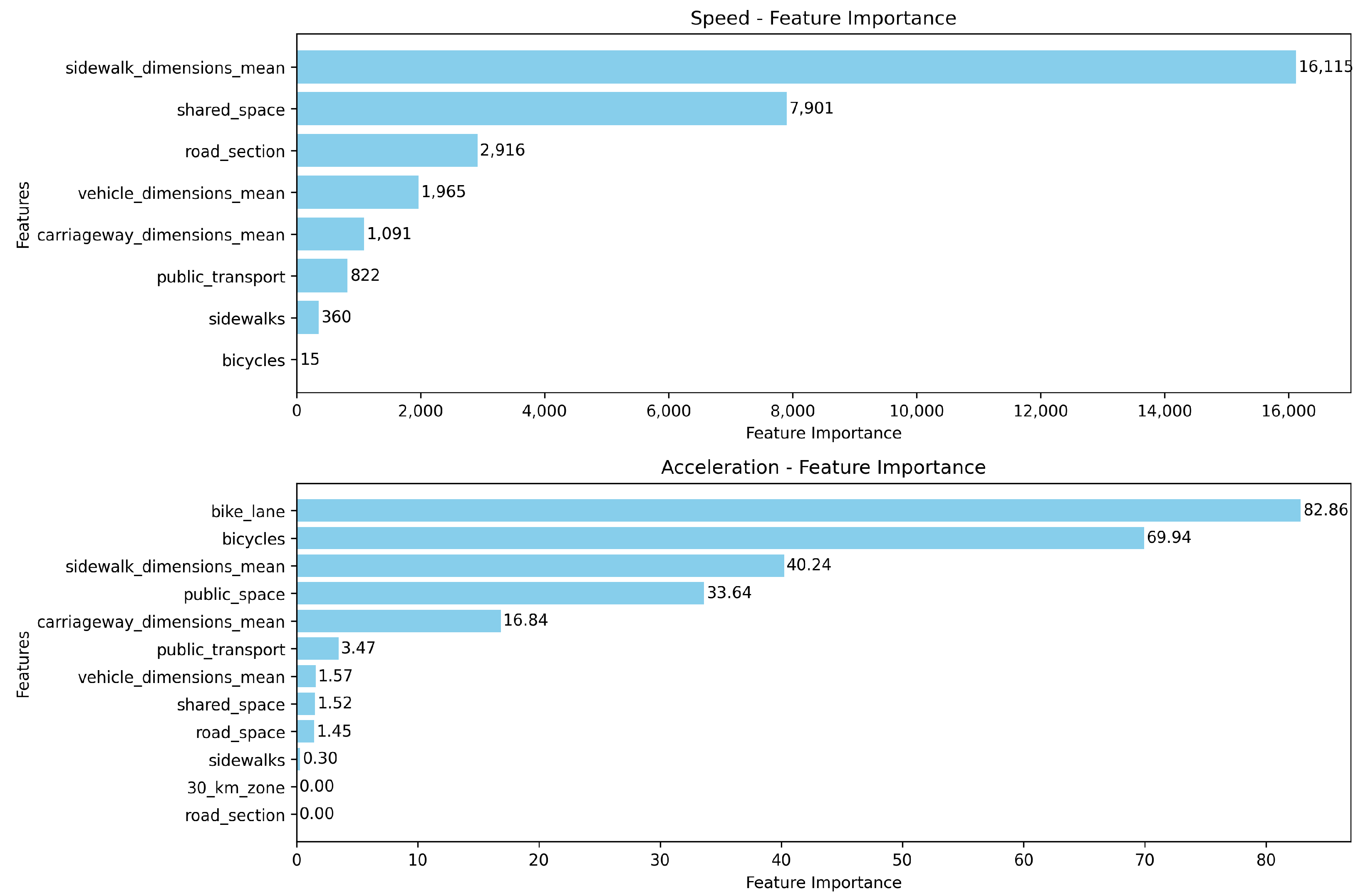
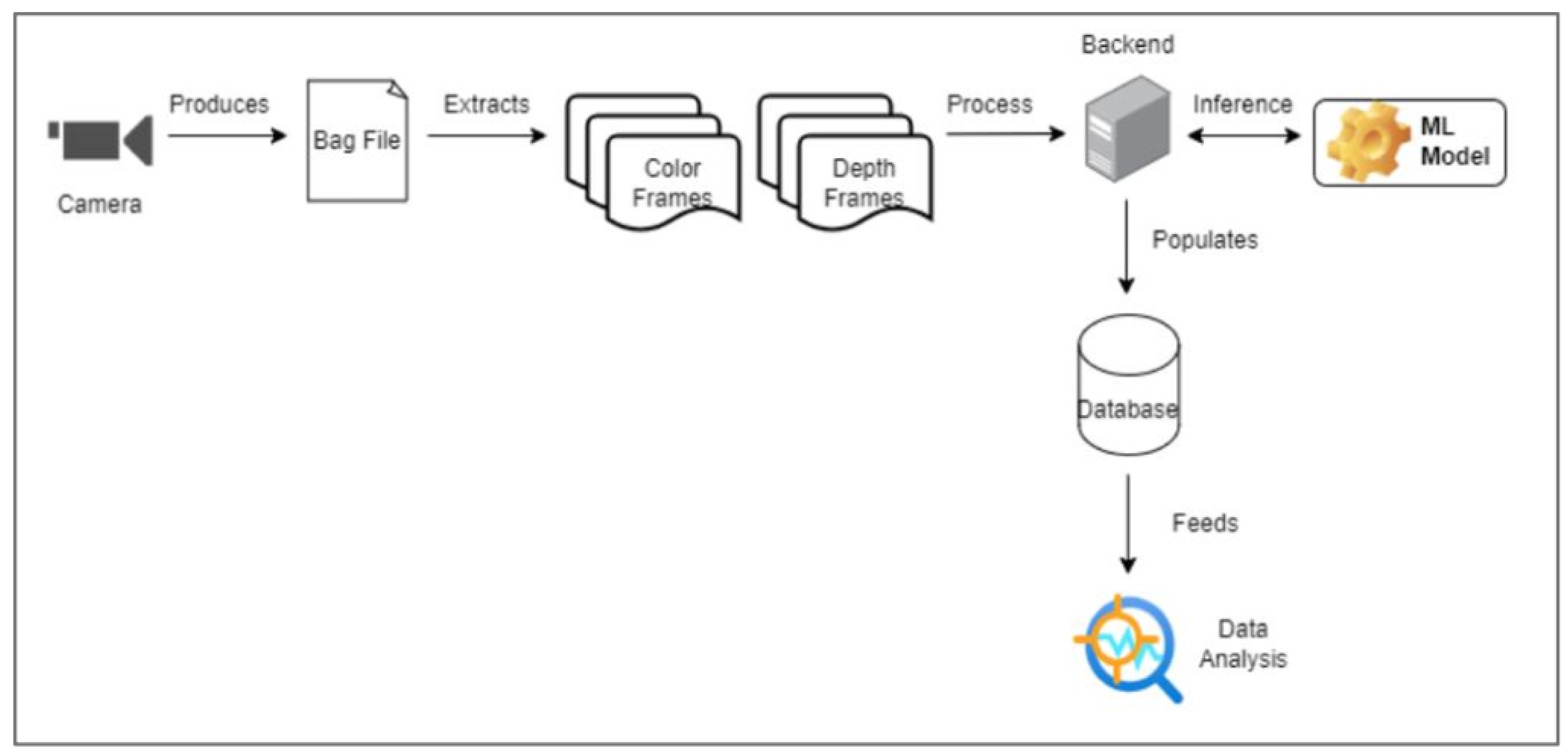
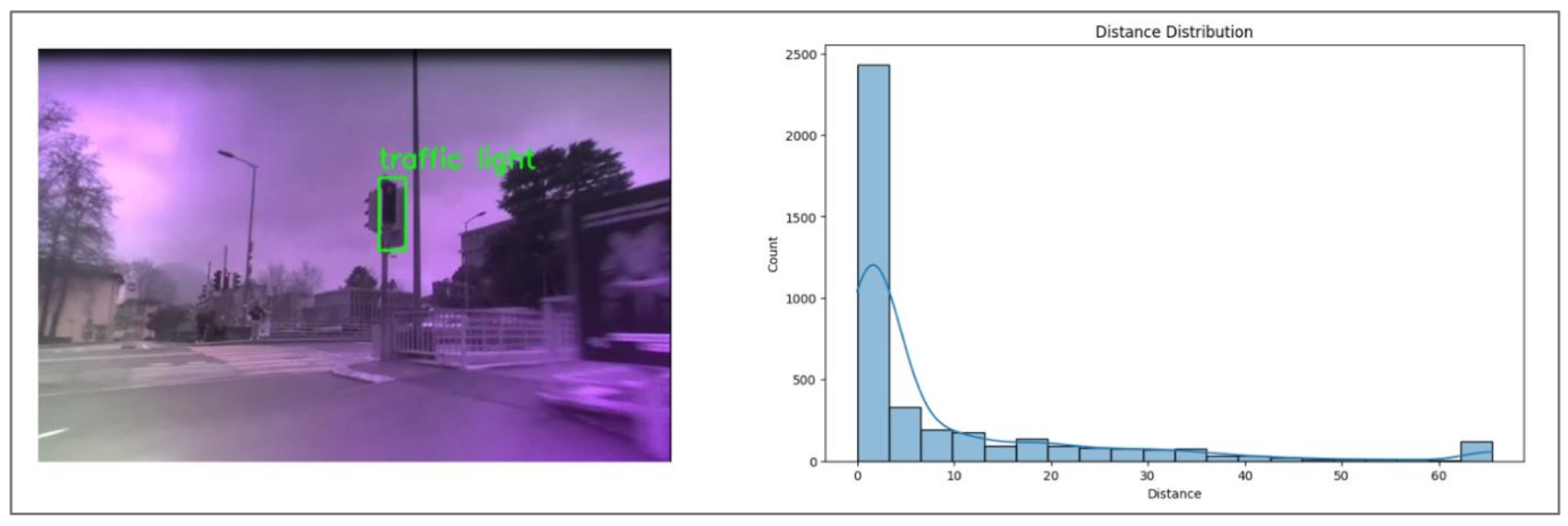
After that, a model-based analysis on machine data was performed to identify the most impactful road characteristics on vehicle speed and acceleration, as a result of a supervised machine learning model prediction (Figure 5). More specifically, to build such a model, input data, distributed as shown in Figure 6, were considered. These road characteristics were fed into an eXtreme Gradient Boosting (https://xgboost.readthedocs.io/en/stable/, accesed on 1 April 2024) model [30], selected to reliably assign feature importance scores to the input data. One of the advantages behind the choice of such an ensemble method is that, unlike simple correlation-based methods, XGBoost captures non-linear relationships and feature interactions, making it more effective for selecting informative features. To optimize the performance of the model, we performed hyperparameter tuning, which led to the selection of the following values: 1000 estimators, ensuring a sufficient number of boosting rounds to capture complex patterns in the data; a learning rate of 0.01, which balances convergence speed and performance to prevent overfitting; and a maximum depth of 100. - Analysis of RealSense camera data for the inference of encounters and conflictsThe RealSense D455 cameras are RGB-D cameras, meaning they capture both color (RGB) and depth (D) information to generate a three-dimensional representation of the surrounding environment. Depth measurement was achieved using stereoscopic vision, employing two grayscale sensors and an infrared projector. Additionally, an RGB sensor was used to capture a standard color image. Although the cameras were equipped with an active projector operating at 850 nm, they were used in passive mode for this study. This choice was made because the active light source would be significantly weaker compared to sunlight, reducing its effectiveness in outdoor environments. Using the cameras in passive mode also minimized power consumption, thereby extending battery life. The depth image, captured with the stereoscopic depth sensor, was inherently misaligned with the RGB image due to the spatial separation of the sensors. However, a factory calibration process enabled a post-processed alignment between the Field of View (FoV) of the depth map and the RGB image. This alignment ensured that any model applied to the RGB image could be accurately transferred at a pixel level to the corresponding depth map, facilitating precise spatial analysis and scene understanding. An example of aligned depth-image pictures is shown in Figure 7. To perform object detection and tracking, we employed the latest version of the You Only Look Once (YOLO) framework, specifically https://docs.ultralytics.com/it/models/yolov8/, accessed on 1 April 2024. Renowned for its speed and accuracy, YOLO is particularly well suited for real-time applications such as video-based road data analysis. In this study, it was applied to the RGB images and then transferred to the aligned depth images, allowing the estimation of the distance between the detected person and the camera. This estimation was performed using the median of the depth values within the bounding box, mitigating the influence of any background pixels that might be present within the detection area. Among the pre-trained classes available in YOLO, we selected those relevant to urban mobility, including pedestrians, cars, bicycles, and motorcycles, to ensure effective detection and tracking in road environments. Based on the objects tracked by this analysis, a heuristic was applied to differentiate between encounter and conflict events. These events were correlated to the characteristics of the roads visited.
2.6. Data Collection: Social Testing
3. Results
3.1. Data Analysis: Urban
- Presence of slopes limiting the use of the Genny Zero device. In all the cities analyzed, gradients exceeding 11.3° present a barrier to the use of micromobility devices such as Genny Zero.
- Integration with public transport networks. Each urban area is equipped with well-developed public transportation systems (including buses, trains, and funiculars), facilitating intermodal mobility and helping to overcome challenges related to steep gradients.
- Active or expanding bike-sharing services. All four cities have implemented or are expanding bike-sharing services, including e-bikes and, in some cases, e-cargo bikes.
- Availability of charging stations for electric vehicles. Charging infrastructure is present in all cases, supporting the use of electric vehicles and micromobility devices, although coverage may vary between city centers and peripheral areas.
- Analysis and provision of parking facilities. Each city offers parking areas for both cars and bicycles, although the number of bicycle parking spaces is generally lower compared to car parking spaces.
3.2. Data Analysis: Experiment
- Inertial sensor data, sampling frequency 50 Hz (3D acceleration, 3D gyroscope, front and rear battery voltage, tilt speed, and front and rear battery current).
- Vehicle inertial data, sampling frequency 10 Hz (pitch, distance traveled, slope, torque percentage, steering position, roll, and handlebar height speed).
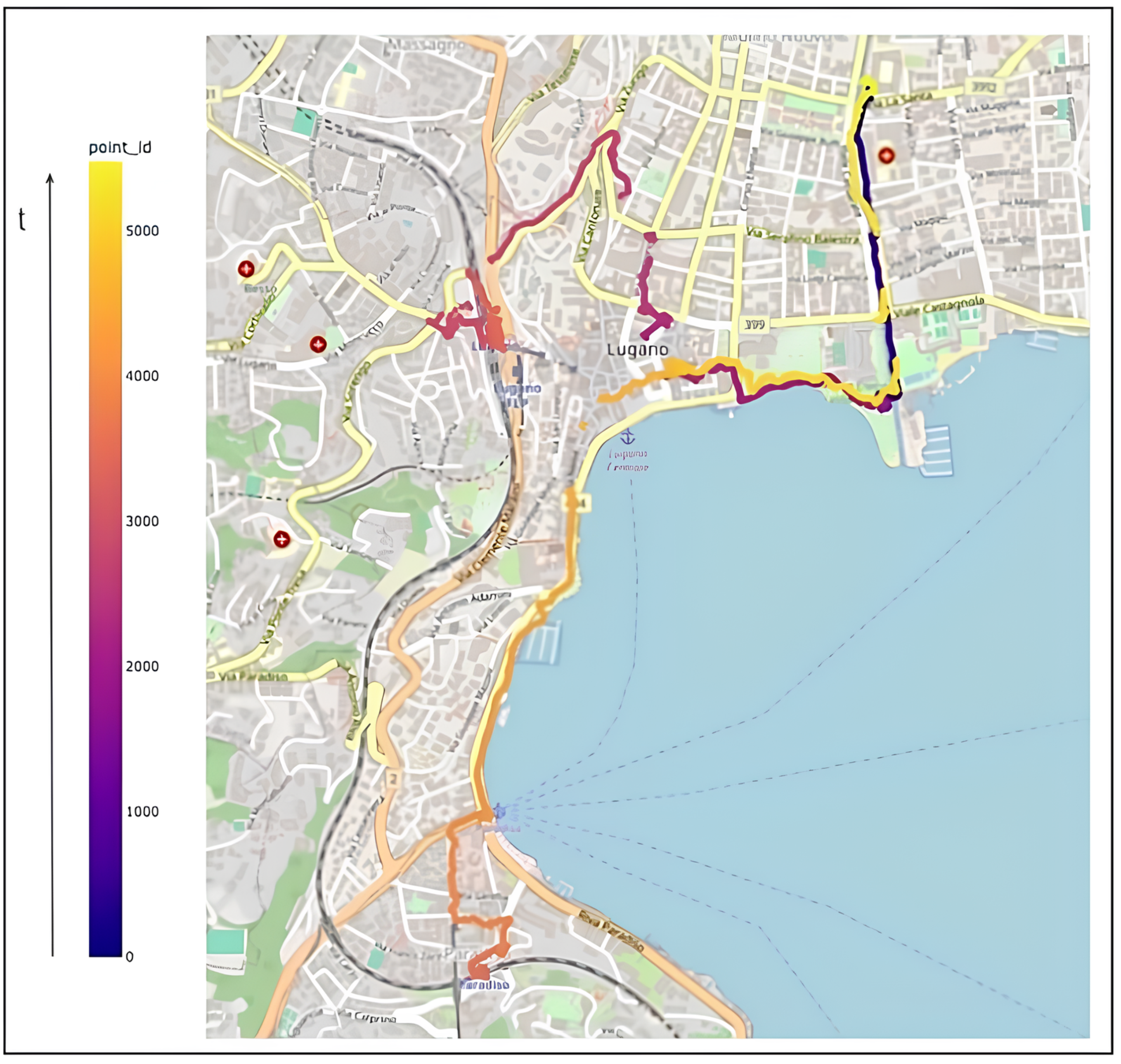
- GPS data, sampling frequency 1 Hz (latitude, longitude, and altitude).
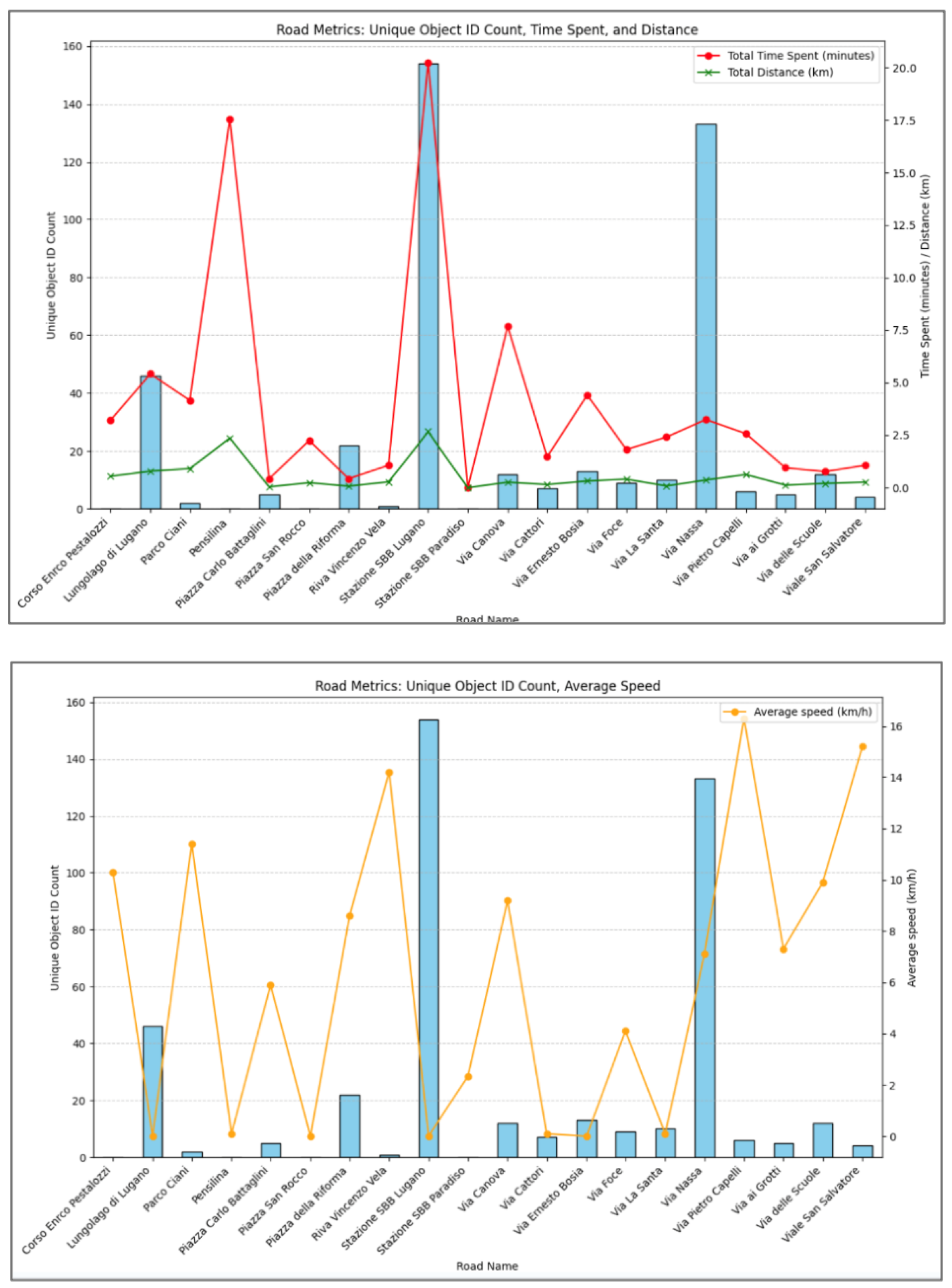
- The Genny device demonstrated sustained and quasi-constant speed on the ‘Bike Path’ and ‘Bike Lane’ segments. This suggests that cycling infrastructure does not pose a potential conflict for Genny Zero (Figure 26);
- In areas where vehicular traffic is restricted and in 30 km/h zones, Genny Zero moves at high speeds without encountering obstacles, allowing free and unobstructed movement (Figure 26).
- (i)
- The most influential feature is sidewalk width, which has a significantly higher importance score than any other feature.
- (ii)
- The second-most important feature, also with a significant impact, is the presence of shared space.
- (iii)
- All other features, such as, for instance, the vehicle’s dimensions, have a much smaller impact on the target variable.
- (iv)
- In this case, the presence of a bicycle has minimal impact.
- (i)
- The most relevant feature for acceleration is the type of route, e.g., including the presence of a bike lane, followed by the presence of a bicycle on the route.
- (ii)
- Sidewalk width, the presence of public space, and roadway width also play a role but with lower importance.
- (iii)
- Many other features, including vehicle dimensions and shared space, have much smaller contributions.
- Frames were processed and rotated if necessary.
- Frames were processed on a backend server, where analyses such as object (human) detection, tracking, and distance estimation were performed.
- Raw and processed data were stored in a database infrastructure for further analysis.
- Data were exported in Parquet format to facilitate high-volume structured data analysis.
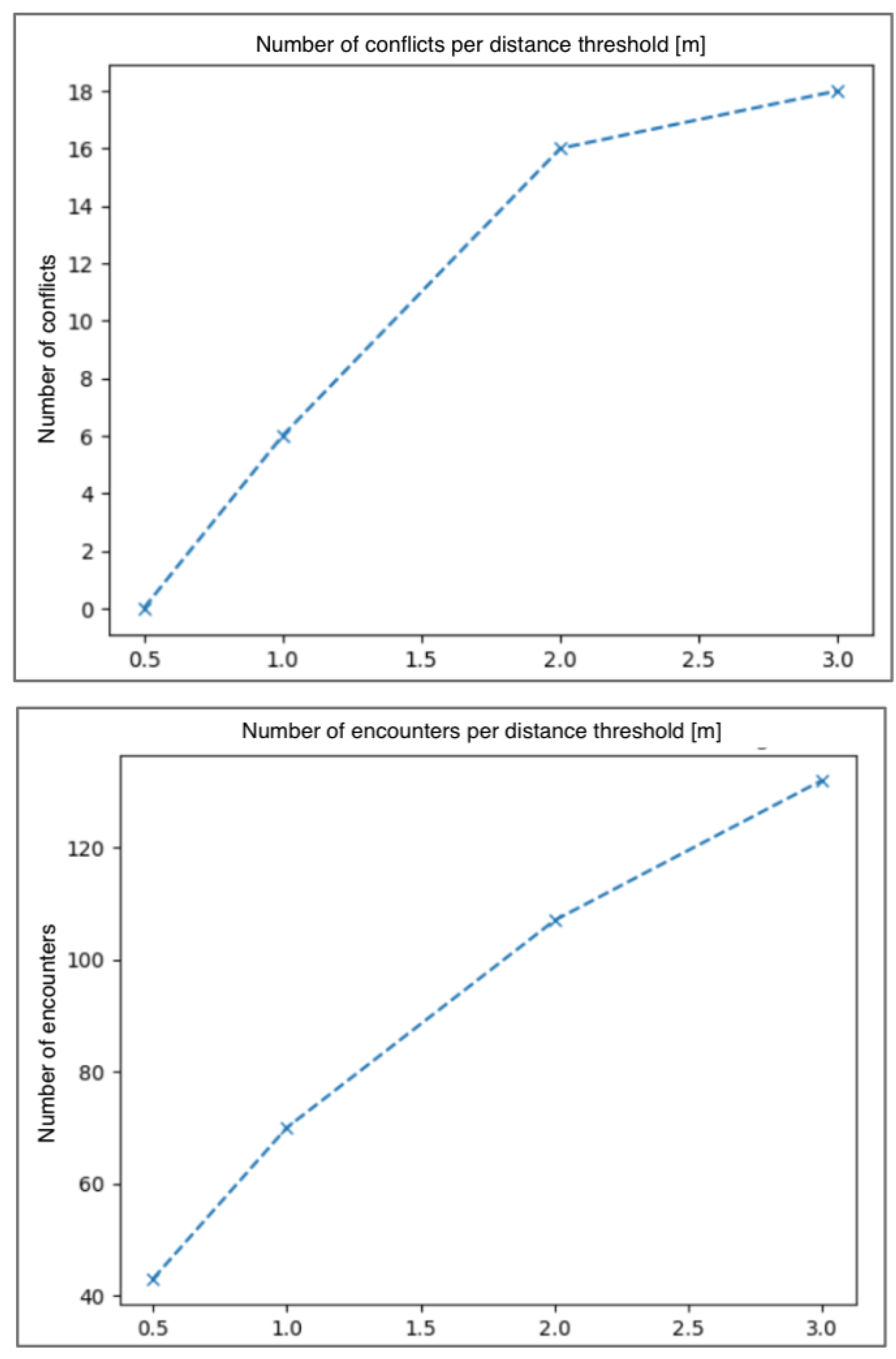
- Conflict: when the vehicle approaches an obstacle (distance below a certain threshold) and brakes. This condition was tested with distance thresholds of 0.5, 1.0, 2.0, and 3.0 m.
- Encounter: when the vehicle approaches an obstacle (distance below a certain threshold) but does not brake. This condition was also tested with distance thresholds of 0.5, 1.0, 2.0, and 3.0 m.
3.3. Data Analysis: Social
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gehl, J. Cities for People; Island Press: Washington, DC, USA, 2010. [Google Scholar]
- Newman, P.; Kenworthy, J. Sustainability and Cities: Overcoming Automobile Dependence; Island Press: Washington, DC, USA, 1999. [Google Scholar]
- United Nations. World Cities Report 2020: The Value of Sustainable Urbanization; World Cities Report; UN Habitat: Nairobi, Kenya, 2020. [Google Scholar]
- Lefebvre, H.; Kofman, E.; Lebas, E. Writings on Cities; Wiley: Hoboken, NJ, USA, 1996. [Google Scholar]
- Turok, I.; McGranahan, G. Urbanization and economic growth: The arguments and evidence for Africa and Asia. Environ. Urban. 2013, 25, 465–482. [Google Scholar] [CrossRef]
- Fainstein, S.S. The Just City; Cornell Paperbacks, Cornell University Press: Ithaca, NY, USA, 2010. [Google Scholar]
- Agyeman, J. Sustainable Communities and the Challenge of Environmental Justice; NYU Press: New York, NY, USA, 2005. [Google Scholar]
- Shaheen, S.; Cohen, A. Shared Micromobility Policy Toolkit: Docked and Dockless Bike and Scooter Sharing; Technical Report; Institute of Transportation Studies, UC Berkeley: Berkeley, CA, USA, 2019. [Google Scholar]
- Banister, D. The sustainable mobility paradigm. Transp. Policy 2008, 15, 73–80. [Google Scholar] [CrossRef]
- Olabi, A.; Wilberforce, T.; Obaideen, K.; Sayed, E.T.; Shehata, N.; Alami, A.H.; Abdelkareem, M.A. Micromobility: Progress, benefits, challenges, policy and regulations, energy sources and storage, and its role in achieving sustainable development goals. Int. J. Thermofluids 2023, 17, 100292. [Google Scholar] [CrossRef]
- Vizmpa, C.; Botzoris, G.; Lemonakis, P.; Galanis, A. Micromobility in Urban Trail Paths: Expanding and Strengthening the Planning of 15-min Cities. Land 2023, 12, 2181. [Google Scholar] [CrossRef]
- Tamagusko, T.; Gomes Correia, M.; Rita, L.; Bostan, T.C.; Peliteiro, M.; Martins, R.; Santos, L.; Ferreira, A. Data-Driven Approach for Urban Micromobility Enhancement through Safety Mapping and Intelligent Route Planning. Smart Cities 2023, 6, 2035–2056. [Google Scholar] [CrossRef]
- Nikolaeva, A.; Adey, P.; Cresswell, T.; Lee, J.Y.; Nóvoa, A.; Temenos, C. Commoning mobility: Towards a new politics of mobility transitions. Trans. Inst. Br. Geogr. 2020, 45, 1–18. [Google Scholar] [CrossRef]
- Gössling, S. Integrating e-scooters in urban transportation: Problems, policies, and the prospect of system change. Transp. Res. Part D Transp. Environ. 2020, 79, 102230. [Google Scholar] [CrossRef]
- Fishman, E. Bikeshare: A review of recent literature. Transp. Rev. 2015, 36, 132–147. [Google Scholar] [CrossRef]
- Nuvolati, G. Mobilità Urbana: Complessità Fisiche e Culturali; Firenze University Press: Florence, Italy, 2007. [Google Scholar]
- Di Fazio, C.; Paradiso, M. Mobilità urbane emergenti: Valutazione critica della micromobilità di bici e monopattini tra individualità, pubblico e privato. Doc. Geogr. 2023, 2, 515–532. [Google Scholar]
- Treccani Istituto della Enciclopedia Italiana. Definition of Micromobility; Treccani Istituto della Enciclopedia Italiana: Rome, Italy, 2020. [Google Scholar]
- Oeschger, G.; Caruso, G.; Gauvin, C. Parameters and Policies for Micromobility Devices; Forum Internazionale dei Trasporti: Rome, Italy, 2020. [Google Scholar]
- Rossato, S. Human-Powered and Electric-Assisted Micromobility: Challenges and Opportunities. Master’s Thesis, University of Padua, Padova, Italy, 2021. [Google Scholar]
- Becker, H.; Ciari, F.; Axhausen, K.W. Comparing car-sharing and ride-sourcing services: A case study in Switzerland. Transp. Res. Part A Policy Pract. 2020, 131, 54–70. [Google Scholar]
- Meng, S.; Brown, A.; Klein, N.; Thigpen, C.; Haydu, B.; Stout, N. Shared Scooter Parking: The Role of Parking Density and Land Use in Compliance and Demand; University of Oregon: Eugene, OR, USA, 2024. [Google Scholar]
- United Nations Development Programme. Urban Mobility and Regulatory Frameworks for Micromobility; United Nations Development Programme: New York, NY, USA, 2021. [Google Scholar]
- OETV. Ordinanza Concernente le Esigenze Tecniche per i Veicoli; Swiss Federal Council: Bern, Switzerland, 1995. [Google Scholar]
- OAC. Ordinanza Sull’ammissione Alla Circolazione di Persone e Veicoli; Swiss Federal Council: Bern, Switzerland, 1976. [Google Scholar]
- ONC. Ordinanza Sulle Norme Della Circolazione Stradale; Swiss Federal Council: Bern, Switzerland, 1962. [Google Scholar]
- Touring Club Switzerland. Technical and Regulatory Requirements for Micromobility Devices in Switzerland. Available online: https://www.tcs.ch/it/ (accessed on 20 March 2025).
- Ticino Cantonal Regulations. (n.d.) Normative Cantonali per la Regolamentazione Della Micromobilità. Canton of Ticino. Available online: https://www4.ti.ch/di/strade-sicure/mobilita-lenta/mobilita-pedonale (accessed on 20 March 2025).
- Pearson, K. Note on regression and inheritance in the case of two parents. Proc. R. Soc. Lond. 1895, 58, 240–242. [Google Scholar]
- Chen, T.; Guestrin, C. XGBoost: A scalable tree boosting system. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, KDD’16, New York, NY, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Lemanski, C. Citizenship and Infrastructure: Practices and Identities of Citizens and the State; Routledge Studies in Urbanism and the City; Routledge: Oxfordshire, UK, 2019. [Google Scholar]
- Bignami, F.; Hanakata, N. Platform urbanisation, infrastructures and techno-politics: The turn towards urban citizenship. J. Eur. Stud. 2024, 54, 42–58. [Google Scholar] [CrossRef]
- Reck, D.J.; Martin, H.; Axhausen, K.W. Mode choice, substitution patterns and environmental impacts of shared and personal micro-mobility. Transp. Res. Part D Transp. Environ. 2022, 102, 103134. [Google Scholar] [CrossRef]
- de Bortoli, A. Environmental performance of shared micromobility and personal alternatives using integrated modal LCA. Transp. Res. Part D Transp. Environ. 2021, 93, 102743. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rollandi, A.; Papandrea, M.; Bignami, F.; Di Maggio, L.; Günther, F.; Quattrini, A.; Minardi, L.; Cocca, M.; Bettini, A. Inclusive MicroMob: Enhancing Urban Mobility Through Micromobility Solutions. Smart Cities 2025, 8, 69. https://doi.org/10.3390/smartcities8020069
Rollandi A, Papandrea M, Bignami F, Di Maggio L, Günther F, Quattrini A, Minardi L, Cocca M, Bettini A. Inclusive MicroMob: Enhancing Urban Mobility Through Micromobility Solutions. Smart Cities. 2025; 8(2):69. https://doi.org/10.3390/smartcities8020069
Chicago/Turabian StyleRollandi, Annalisa, Michela Papandrea, Filippo Bignami, Laura Di Maggio, Felix Günther, Andrea Quattrini, Luca Minardi, Michele Cocca, and Albedo Bettini. 2025. "Inclusive MicroMob: Enhancing Urban Mobility Through Micromobility Solutions" Smart Cities 8, no. 2: 69. https://doi.org/10.3390/smartcities8020069
APA StyleRollandi, A., Papandrea, M., Bignami, F., Di Maggio, L., Günther, F., Quattrini, A., Minardi, L., Cocca, M., & Bettini, A. (2025). Inclusive MicroMob: Enhancing Urban Mobility Through Micromobility Solutions. Smart Cities, 8(2), 69. https://doi.org/10.3390/smartcities8020069