
Integrated Route-Planning System for Agricultural Robots


 ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. System Architecture
- The user–FMIS-UGV communication function;
- The data customization function, which provides the necessary tools for transforming data into a format that is compatible with ROS;
- The navigation mode, which is an adapted version of the Navigation Stack [40] that has been modified to enhance its ability to adapt to a dynamic outdoor environment;
- The ROS node that was created to perform time frame (TF) transformations and to establish a global frame that references the UTM coordinate system.
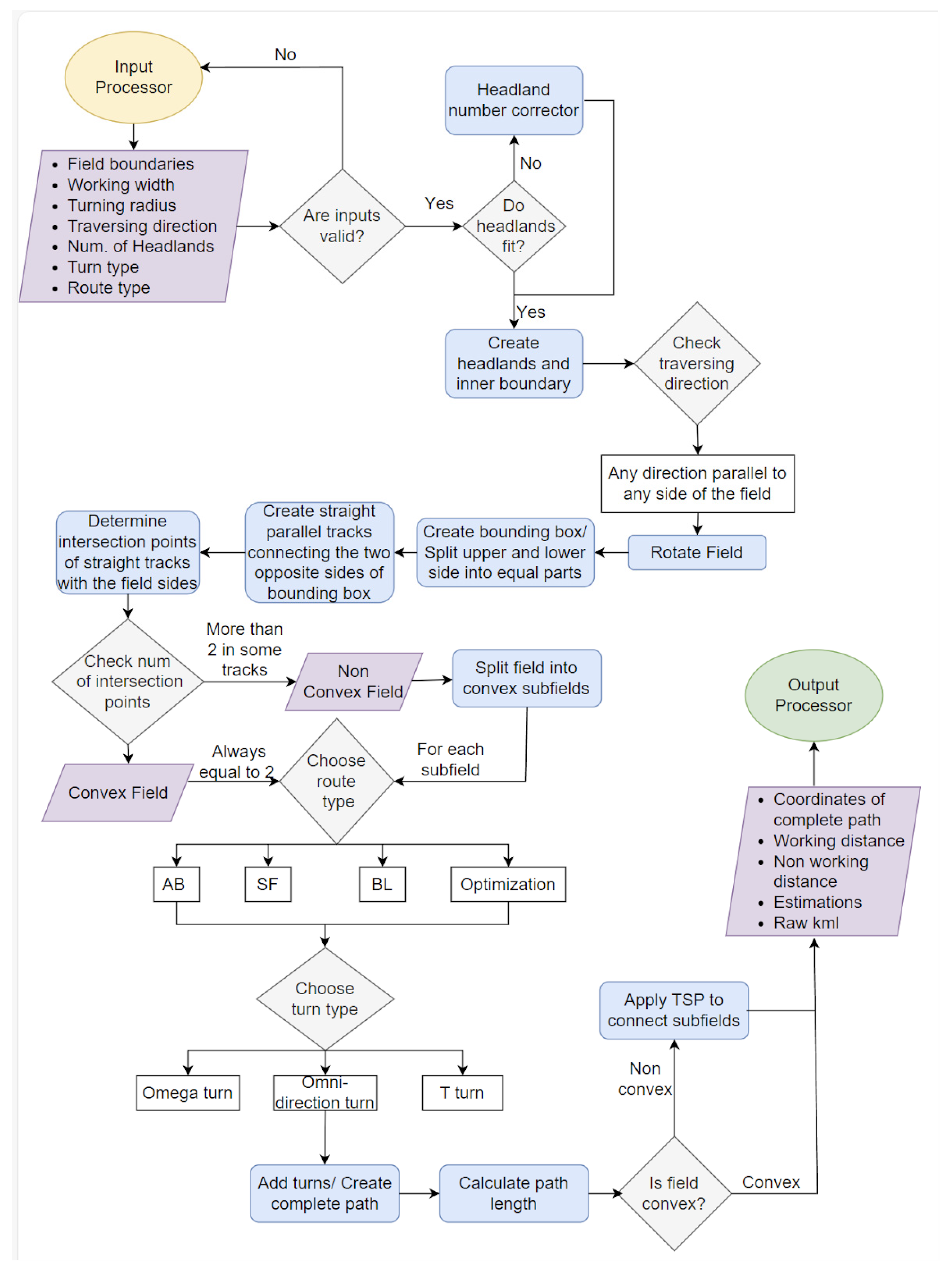
2.2. Route-Planning Module
2.2.1. Inputs
- Working width (w). This refers to the effective operating width and not to the actual width of the carried implement. For example, in a spreading fertilizer application, the effective working width is the range of the fertilizer spread, while, in an orchard, spraying the effective operating width is identical to the inter-row distance.
- UGV’s kinematics. This includes the steering type of the UGV and the corresponding minimum turning radius (r). This variable depends on the type of machinery and, more specifically, on their size and maneuverability, but also on the user preferences in terms of agronomic restrictions. For example, although a UGV can operate under a differential steering system it might be preferable in terms of soil disturbance to follow a smoother turn (r ≠ 0) in order not to disturb the topsoil of the field.
- Traversing direction. For simplicity, the user can select the direction of one of the field vertices as the traversing direction.
- Number of headlands passes. Field area is usually divided into two parts, the headland area, and the field body area. Headland passes describe the concentric paths that the vehicle traverses while in the headland area. These paths consist of sequentially clockwise ordered points. However, as explained later, this user preference can be altered from the system based on the kinematic restrictions of the UGV (for example, to ensure sufficient area for the headland turnings) or based on the field shape complexity (for example, to provide headland passes that do not intersect each other due to sharp field boundary corners).
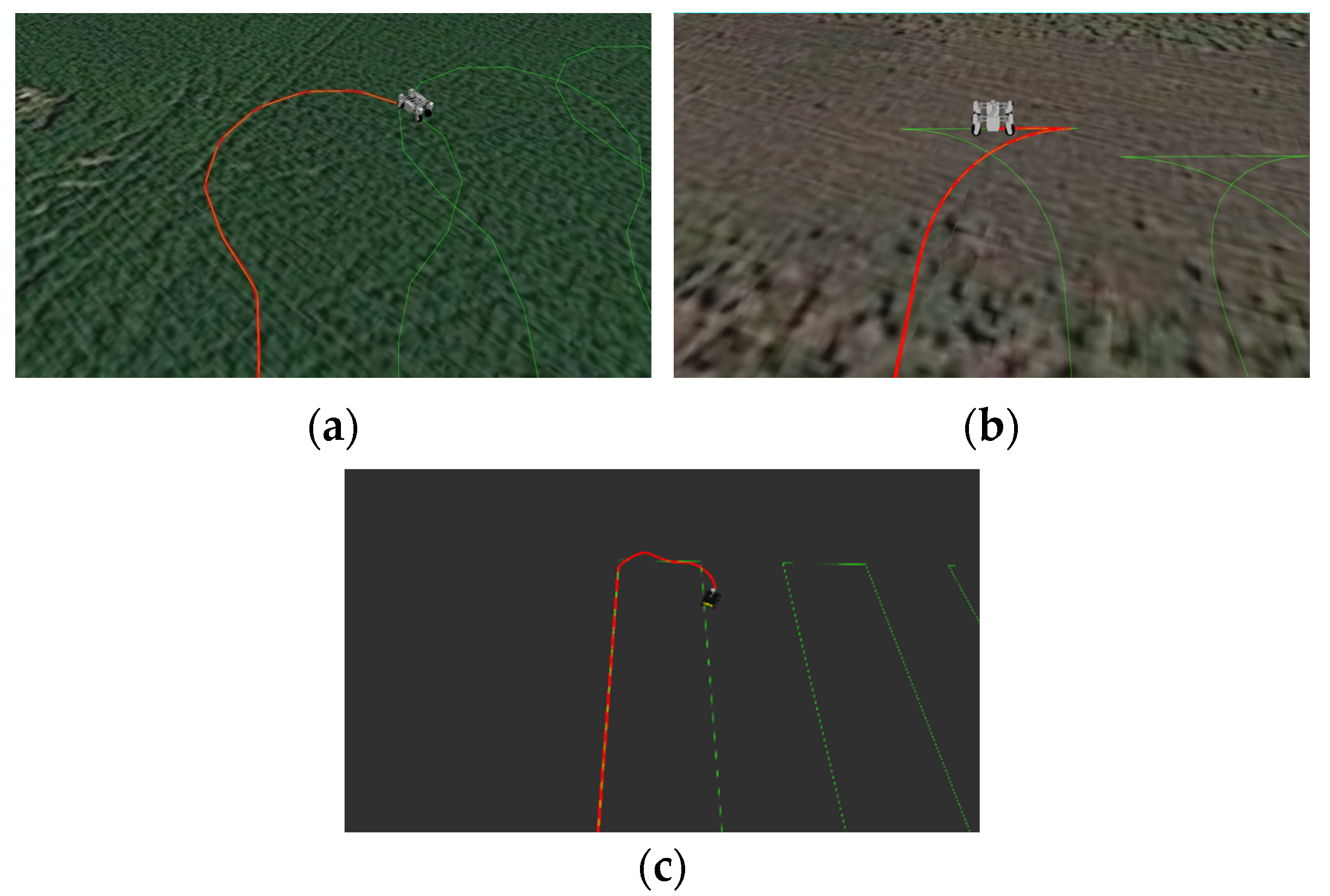
- Turning type. There are two options: the forward-turn (Ωturn) and the reverse-turn (Tturn) [41]. The omni-direction turn can be considered a marginal case (where r = 0) in any of these two turning types.
- Route type. Route types can be either predetermined patterns of tracks’ traversal sequence (AB, SF, and BL, as explained in the following), or optimized field-work patterns.
2.2.2. Headland Passes
2.2.3. Route Types
2.2.4. Turn Types
2.2.5. Complete Path Generation
2.3. FMIS–UGV Communication
2.4. Data Conversion
2.5. Global Frame Creator
2.6. UGV Navigation
2.7. Analytics Module
3. System Demonstration
3.1. Mobile Platforms
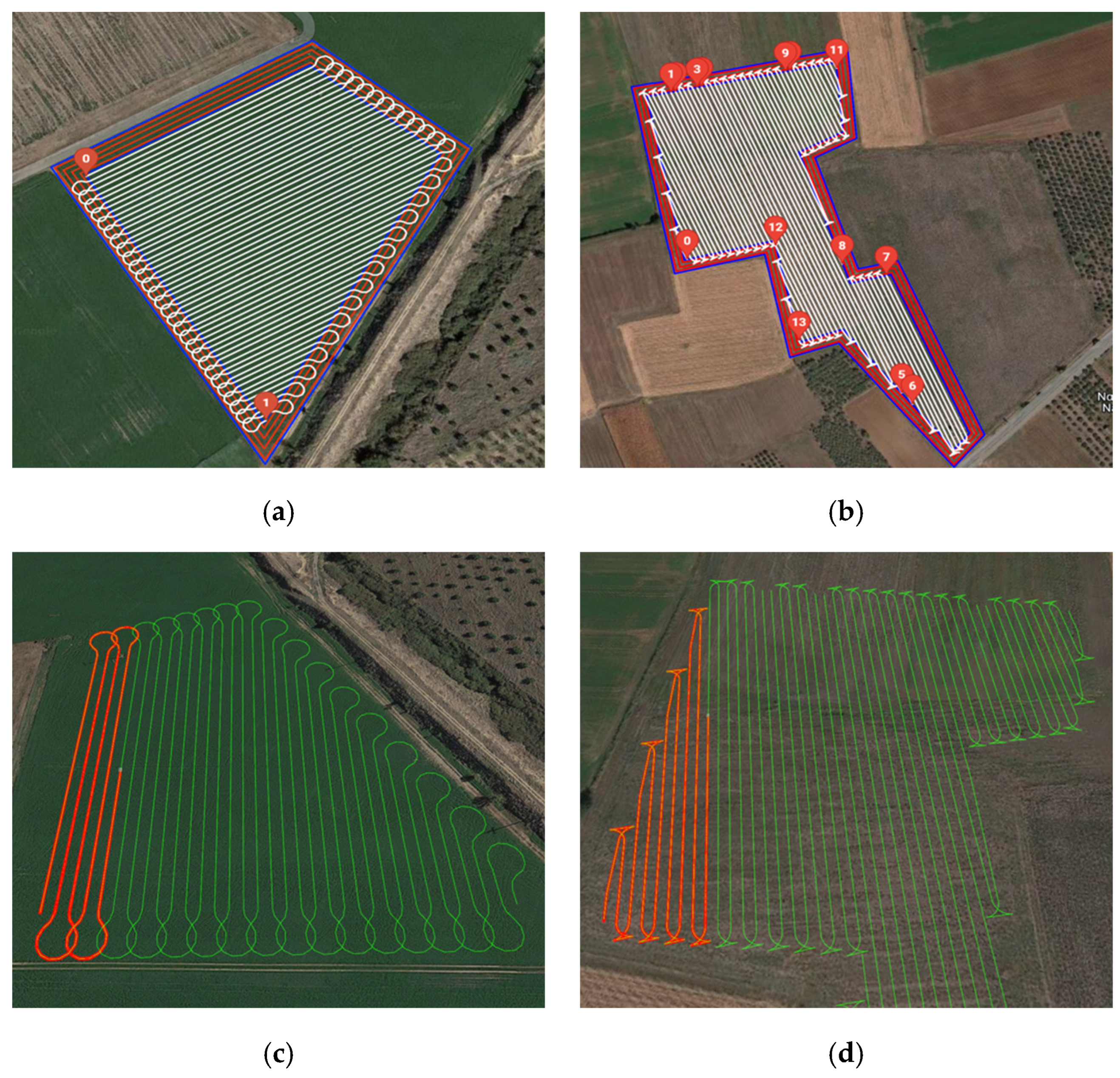
3.2. Case Studies
- To show the ability of the system to generate various configurations of plans as functions of different fieldwork patterns, operating directions, vehicle turning radius, and operating widths;
- To show the differentiation in operating efficiency (FTE) for different configurations;
- To show the ability of the system to provide feasible plans for both convex and non-convex field shapes.
- Field A (under grass cultivation): w = 4.5 m, r = 6 m, turn type → Ωturn, and driving direction parallel to the longest edge of the field (Figure 8a,c);
- Field B (under wheat cultivation), w = 4.5 m, r = 6 m, turn type → Tturn, and driving direction parallel to the longest edge of the field (Figure 8b,d).
- Configuration 1: w = 1.5 m, r = 6 m, and direction ≡ DIR_1.
- Configuration 2: w = 4.5 m, r = 3 m, and direction ≡ DIR_2.
4. Discussion and Conclusions
- The recording and transition of operational data, e.g., crop health monitoring data, to the FMIS;
- The recording and transition UGV performance data, e.g., power consumption and task times;
- The transition to the UGV of complete mission-planning data, for example, variable rate application plans and task schedules, combined with route plans;
- The inclusion of AI capabilities for human–UGV interaction processes.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lytos, A.; Lagkas, T.; Sarigiannidis, P.; Zervakis, M.; Livanos, G. Towards smart farming: Systems, frameworks and exploitation of multiple sources. Comput. Netw. 2020, 172, 107147. [Google Scholar] [CrossRef]
- Yadav, S.; Kaushik, A.; Sharma, M.; Sharma, S. Disruptive Technologies in Smart Farming: An Expanded View with Sentiment Analysis. AgriEngineering 2022, 4, 424–460. [Google Scholar] [CrossRef]
- Žuraulis, V.; Pečeliūnas, R. The Architecture of an Agricultural Data Aggregation and Conversion Model for Smart Farming. Appl. Sci. 2023, 13, 11216. [Google Scholar] [CrossRef]
- Sharma, V.; Tripathi, A.K.; Mittal, H. Technological revolutions in smart farming: Current trends, challenges & future directions. Comput. Electron. Agric. 2022, 201, 107217. [Google Scholar] [CrossRef]
- Gao, Z.; Luo, Z.; Zhang, W.; Lv, Z.; Xu, Y. Deep Learning Application in Plant Stress Imaging: A Review. AgriEngineering 2020, 2, 430–446. [Google Scholar] [CrossRef]
- Hardy, T.; Kooistra, L.; Franceschini, M.D.; Richter, S.; Vonk, E.; van den Eertwegh, G.; van Deijl, D. Sen2Grass: A Cloud-Based Solution to Generate Field-Specific Grassland Information Derived from Sentinel-2 Imagery. AgriEngineering 2021, 3, 118–137. [Google Scholar] [CrossRef]
- Chowdhury, M.E.H.; Rahman, T.; Khandakar, A.; Ayari, M.A.; Khan, A.U.; Khan, M.S.; Al-Emadi, N.; Reaz, M.B.I.; Islam, M.T.; Ali, S.H.M. Automatic and Reliable Leaf Disease Detection Using Deep Learning Techniques. AgriEngineering 2021, 3, 294–312. [Google Scholar] [CrossRef]
- Doshi, J.; Patel, T.; kumar Bharti, S. Smart Farming using IoT, a solution for optimally monitoring farming conditions. Procedia Comput. Sci. 2019, 160, 746–751. [Google Scholar] [CrossRef]
- Sirimorok, N.; Paweroi, R.M.; Arsyad, A.A.; Köppen, M. Smart Farm Security by Combining IoT Sensor Network and Virtualized Mycelium Network. Sensors 2023, 23, 8689. [Google Scholar] [CrossRef]
- Bhat, S.A.; Huang, N.F.; Sofi, I.B.; Sultan, M. Agriculture-Food Supply Chain Management Based on Blockchain and IoT: A Narrative on Enterprise Blockchain Interoperability. Agriculture 2021, 12, 40. [Google Scholar] [CrossRef]
- Lioutas, E.D.; Charatsari, C. Smart farming and short food supply chains: Are they compatible? Land Use Policy 2020, 94, 104541. [Google Scholar] [CrossRef]
- Aliyu, A.A.; Liu, J.; Aliyu, A.A.; Liu, J. Blockchain-Based Smart Farm Security Framework for the Internet of Things. Sensors 2023, 23, 7992. [Google Scholar] [CrossRef]
- Jararweh, Y.; Fatima, S.; Jarrah, M.; AlZu’bi, S. Smart and sustainable agriculture: Fundamentals, enabling technologies, and future directions. Comput. Electr. Eng. 2023, 110, 108799. [Google Scholar] [CrossRef]
- Dhanaraju, M.; Chenniappan, P.; Ramalingam, K.; Pazhanivelan, S.; Kaliaperumal, R. Smart Farming: Internet of Things (IoT)-Based Sustainable Agriculture. Agriculture 2022, 12, 1745. [Google Scholar] [CrossRef]
- Hazim, Z.; Azlan, Z.; Junaini, N.; Alamshah Bolhassan, N.; Wahi, R.; Arip, M.A. Harvesting a sustainable future: An overview of smart agriculture’s role in social, economic, and environmental sustainability. J. Clean. Prod. 2024, 434, 140338. [Google Scholar] [CrossRef]
- Daum, T.; Baudron, F.; Birner, R.; Qaim, M.; Grass, I. Addressing agricultural labour issues is key to biodiversity-smart farming. Biol. Conserv. 2023, 284, 110165. [Google Scholar] [CrossRef]
- Chen, H.Y.; Sharma, K.; Sharma, C.; Sharma, S. Integrating explainable artificial intelligence and blockchain to smart agriculture: Research prospects for decision making and improved security. Smart Agric. Technol. 2023, 6, 100350. [Google Scholar] [CrossRef]
- Rettore de Araujo Zanella, A.; da Silva, E.; Pessoa Albini, L.C. Security challenges to smart agriculture: Current state, key issues, and future directions. Array 2020, 8, 100048. [Google Scholar] [CrossRef]
- Wiseman, L.; Sanderson, J.; Zhang, A.; Jakku, E. Farmers and their data: An examination of farmers’ reluctance to share their data through the lens of the laws impacting smart farming. NJAS Wagening. J. Life Sci. 2019, 90–91, 100301. [Google Scholar] [CrossRef]
- van der Burg, S.; Bogaardt, M.J.; Wolfert, S. Ethics of smart farming: Current questions and directions for responsible innovation towards the future. NJAS Wagening. J. Life Sci. 2019, 90–91, 100289. [Google Scholar] [CrossRef]
- Mark, R. Ethics of Using AI and Big Data in Agriculture: The Case of a Large Agriculture Multinational. ORBIT J. 2019, 2, 1–27. [Google Scholar] [CrossRef]
- Amiri-Zarandi, M.; Dara, R.A.; Duncan, E.; Fraser, E.D.G. Big Data Privacy in Smart Farming: A Review. Sustainability 2022, 14, 9120. [Google Scholar] [CrossRef]
- Cordova-Cardenas, R.; Emmi, L.; Gonzalez-de-Santos, P. Enabling Autonomous Navigation on the Farm: A Mission Planner for Agricultural Tasks. Agriculture 2023, 13, 2181. [Google Scholar] [CrossRef]
- Cantelli, L.; Bonaccorso, F.; Longo, D.; Melita, C.D.; Schillaci, G.; Muscato, G. A Small Versatile Electrical Robot for Autonomous Spraying in Agriculture. AgriEngineering 2019, 1, 391–402. [Google Scholar] [CrossRef]
- Iberraken, D.; Gaurier, F.; Roux, J.C.; Chaballier, C.; Lenain, R. Autonomous Vineyard Tracking Using a Four-Wheel-Steering Mobile Robot and a 2D LiDAR. AgriEngineering 2022, 4, 826–846. [Google Scholar] [CrossRef]
- Moysiadis, V.; Tsolakis, N.; Katikaridis, D.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Mobile Robotics in Agricultural Operations: A Narrative Review on Planning Aspects. Appl. Sci. 2020, 10, 3453. [Google Scholar] [CrossRef]
- Kaleem, A.; Hussain, S.; Aqib, M.; Jehanzeb, M.; Cheema, M.; Saleem, S.R.; Farooq, U.; Pk, M.J.M.C. Development Challenges of Fruit-Harvesting Robotic Arms: A Critical Review. AgriEngineering 2023, 5, 2216–2237. [Google Scholar] [CrossRef]
- Katikaridis, D.; Moysiadis, V.; Tsolakis, N.; Busato, P.; Kateris, D.; Pearson, S.; Sørensen, C.G.; Bochtis, D. UAV-Supported Route Planning for UGVs in Semi-Deterministic Agricultural Environments. Agronomy 2022, 12, 1937. [Google Scholar] [CrossRef]
- Moysiadis, V.; Katikaridis, D.; Benos, L.; Busato, P.; Anagnostis, A.; Kateris, D.; Pearson, S.; Bochtis, D. An Integrated Real-Time Hand Gesture Recognition Framework for Human–Robot Interaction in Agriculture. Appl. Sci. 2022, 12, 8160. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concepts and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- Lauretti, C.; Tamantini, C.; Tomè, H.; Zollo, L. Robot Learning by Demonstration with Dynamic Parameterization of the Orientation: An Application to Agricultural Activities. Robotics 2023, 12, 166. [Google Scholar] [CrossRef]
- Bechar, A.; Edan, Y. Human-robot collaboration for improved target recognition of agricultural robots. Ind. Robot 2003, 30, 432–436. [Google Scholar] [CrossRef]
- Seyyedhasani, H.; Peng, C.; Jang, W.; Vougioukas, S.G. Collaboration of human pickers and crop-transporting robots during harvesting—Part II: Simulator evaluation and robot-scheduling case-study. Comput. Electron. Agric. 2020, 172, 105323. [Google Scholar] [CrossRef]
- Vasconez, J.P.; Kantor, G.A.; Auat Cheein, F.A. Human–robot interaction in agriculture: A survey and current challenges. Biosyst. Eng. 2019, 179, 35–48. [Google Scholar] [CrossRef]
- Lytridis, C.; Kaburlasos, V.G.; Pachidis, T.; Manios, M.; Vrochidou, E.; Kalampokas, T.; Chatzistamatis, S. An Overview of Cooperative Robotics in Agriculture. Agronomy 2021, 11, 1818. [Google Scholar] [CrossRef]
- Adamides, G.; Katsanos, C.; Parmet, Y.; Christou, G.; Xenos, M.; Hadzilacos, T.; Edan, Y. HRI usability evaluation of interaction modes for a teleoperated agricultural robotic sprayer. Appl. Ergon. 2017, 62, 237–246. [Google Scholar] [CrossRef]
- McCaig, M.; Dara, R.; Rezania, D. Farmer-centric design thinking principles for smart farming technologies. Internet Things 2023, 23, 100898. [Google Scholar] [CrossRef]
- Wang, T.; Xu, X.; Wang, C.; Li, Z.; Li, D. From Smart Farming towards Unmanned Farms: A New Mode of Agricultural Production. Agriculture 2021, 11, 145. [Google Scholar] [CrossRef]
- Koubaa, A. Robot Operating System (ROS): The Complete Reference (Volume 1), 1st ed.; Springer International Publishing: Cham, Switzerland, 2016; ISBN 3319260529. [Google Scholar]
- Megalingam, R.K.; Rajendraprasad, A.; Manoharan, S.K. Comparison of Planned Path and Travelled Path Using ROS Navigation Stack. In Proceedings of the 2020 International Conference for Emerging Technology (INCET), Belgaum, India, 5–7 June 2020; pp. 1–6. [Google Scholar]
- Bochtis, D.D.; Vougioukas, S.G. Minimising the non-working distance travelled by machines operating in a headland field pattern. Biosyst. Eng. 2008, 101, 1–12. [Google Scholar] [CrossRef]
- Höffmann, M.; Patel, S.; Büskens, C. Optimal Coverage Path Planning for Agricultural Vehicles with Curvature Constraints. Agriculture 2023, 13, 2112. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G.; Busato, P.; Berruto, R. Benefits from optimal route planning based on B-patterns. Biosyst. Eng. 2013, 115, 389–395. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G. The vehicle routing problem in field logistics part I. Biosyst. Eng. 2009, 104, 447–457. [Google Scholar] [CrossRef]
- Utamima, A.; Reiners, T.; Ansaripoor, A.H. Optimisation of agricultural routing planning in field logistics with Evolutionary Hybrid Neighbourhood Search. Biosyst. Eng. 2019, 184, 166–180. [Google Scholar] [CrossRef]
- Utamima, A.; Reiners, T.; Ansaripoor, A.H. Evolutionary neighborhood discovery algorithm for agricultural routing planning in multiple fields. Ann. Oper. Res. 2022, 316, 955–977. [Google Scholar] [CrossRef]
- Seyyedhasani, H.; Dvorak, J.S. Reducing field work time using fleet routing optimization. Biosyst. Eng. 2018, 169, 1–10. [Google Scholar] [CrossRef]
- Conesa-Muñoz, J.; Pajares, G.; Ribeiro, A. Mix-opt: A new route operator for optimal coverage path planning for a fleet in an agricultural environment. Expert Syst. Appl. 2016, 54, 364–378. [Google Scholar] [CrossRef]
- Jing, Y.; Luo, C.; Liu, G. Multiobjective path optimization for autonomous land levelling operations based on an improved MOEA/D-ACO. Comput. Electron. Agric. 2022, 197, 106995. [Google Scholar] [CrossRef]
- Guimarães, R.L.; de Oliveira, A.S.; Fabro, J.A.; Becker, T.; Brenner, V.A. ROS Navigation: Concepts and Tutorial. In Robot Operating System (ROS): The Complete Reference (Volume 1); Koubaa, A., Ed.; Springer International Publishing: Cham, Switzerland, 2016; pp. 121–160. ISBN 978-3-319-26054-9. [Google Scholar]
- Vieira, D.; Orjuela, R.; Spisser, M.; Basset, M. Positioning and Attitude determination for Precision Agriculture Robots based on IMU and Two RTK GPSs Sensor Fusion. IFAC-PapersOnLine 2022, 55, 60–65. [Google Scholar] [CrossRef]
- Zheng, K. ROS Navigation Tuning Guide. In Robot Operating System (ROS): The Complete Reference (Volume 6); Koubaa, A., Ed.; Springer International Publishing: Cham, Switzerland, 2021; pp. 197–226. ISBN 978-3-030-75472-3. [Google Scholar]
- Foote, T. tf: The transform library. In Proceedings of the 2013 IEEE Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 22–23 April 2013; pp. 1–6. [Google Scholar]
- Cybulski, B.; Wegierska, A.; Granosik, G. Accuracy comparison of navigation local planners on ROS-based mobile robot. In Proceedings of the 2019 12th International Workshop on Robot Motion and Control (RoMoCo), Poznan, Poland, 8–10 July 2019; pp. 104–111. [Google Scholar]
- Ferreira, A.; Matias, B.; Almeida, J.M.; Silva, E. Real-time GNSS precise positioning: RTKLIB for ROS. Int. J. Adv. Robot. Syst. 2020, 17, 172988142090452. [Google Scholar] [CrossRef]
- Li, Y.; Shi, C. Localization and Navigation for Indoor Mobile Robot Based on ROS. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 1135–1139. [Google Scholar]
- Zhou, K.; Bochtis, D.; Jensen, A.L.; Kateris, D.; Sørensen, C.G. Introduction of a new index of field operations efficiency. Appl. Sci. 2020, 10, 329. [Google Scholar] [CrossRef]
- Parsons, T.; Hanafi Sheikhha, F.; Ahmadi Khiyavi, O.; Seo, J.; Kim, W.; Lee, S. Optimal Path Generation with Obstacle Avoidance and Subfield Connection for an Autonomous Tractor. Agriculture 2023, 13, 56. [Google Scholar] [CrossRef]
- Sarkar, M.; Prabhakar, M.; Ghose, D. Avoiding Obstacles with Geometric Constraints on LiDAR Data for Autonomous Robots. In Third Congress on Intelligent Systems; Kumar, S., Sharma, H., Balachandran, K., Kim, J.H., Bansal, J.C., Eds.; Springer Nature: Singapore, 2023; pp. 749–761. [Google Scholar]
- Song, K.-T.; Chiu, Y.-H.; Kang, L.-R.; Song, S.-H.; Yang, C.-A.; Lu, P.-C.; Ou, S.-Q. Navigation Control Design of a Mobile Robot by Integrating Obstacle Avoidance and LiDAR SLAM. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 1833–1838. [Google Scholar]
- de Jesus, K.J.; Kobs, H.J.; Cukla, A.R.; de Souza Leite Cuadros, M.A.; Gamarra, D.F.T. Comparison of Visual SLAM Algorithms ORB-SLAM2, RTAB-Map and SPTAM in Internal and External Environments with ROS. In Proceedings of the 2021 Latin American Robotics Symposium (LARS), 2021 Brazilian Symposium on Robotics (SBR), and 2021 Workshop on Robotics in Education (WRE), Virtual Conference, Natal, Brazil, 11–15 October 2021; pp. 216–221. [Google Scholar]
- Bochtis, D.; Griepentrog, H.W.; Vougioukas, S.; Busato, P.; Berruto, R.; Zhou, K. Route planning for orchard operations. Comput. Electron. Agric. 2015, 113, 51–60. [Google Scholar] [CrossRef]
- Gu, B.; Liu, Q.; Gao, Y.; Tian, G.; Zhang, B.; Wang, H.; Li, H. Research on the Relative Position Detection Method between Orchard Robots and Fruit Tree Rows. Sensors 2023, 23, 8807. [Google Scholar] [CrossRef] [PubMed]
- Jia, L.; Wang, Y.; Ma, L.; He, Z.; Li, Z.; Cui, Y. Integrated Positioning System of Kiwifruit Orchard Mobile Robot Based on UWB/LiDAR/ODOM. Sensors 2023, 23, 7570. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total Distance (m) | Non-Working Distance (m) | Savings (%) | FTE (%) | FTE Improvement (%) | |
|---|---|---|---|---|---|
| OPT | 16,867.67 | 2211.76 | _ | 88.4 | _ |
| AB | 21,151.77 | 4284.1 | 48.37 | 79.7 | 8.7 |
| SF | 20,705.95 | 3838.28 | 42.38 | 81.5 | 6.9 |
| BL | 20,708.68 | 3841.01 | 42.4 | 81.5 | 6.9 |
| Total Distance (m) | Non-Working Distance (m) | Savings (%) | FTE (%) | FTE Improvement (%) | |
|---|---|---|---|---|---|
| OPT | 50,812.12 | 5733.75 | _ | 88.7 | |
| AB | 56,892.59 | 11,814.22 | 51.47 | 79.2 | 9.5 |
| SF | 55,997.98 | 10,919.61 | 47.49 | 80.5 | 8.2 |
| BL | 56,002.98 | 10,924.38 | 47.51 | 80.5 | 8.2 |
| Total Distance (m) | Non-Working Distance (m) | Savings (%) | FTE (%) | FTE Improvement (%) | |
|---|---|---|---|---|---|
| OPT | 6046.38 | 403.27 | _ | 93.3 | _ |
| AB | 6069.94 | 426.83 | 5.52 | 93 | 0.3 |
| SF | 6163.44 | 520.33 | 22.5 | 91.6 | 1.7 |
| BL | 6183.08 | 539.97 | 25.32 | 91.3 | 2 |
| Total Distance (m) | Non-Working Distance (m) | Savings (%) | FTE (%) | FTE Improvement (%) | |
|---|---|---|---|---|---|
| Opt | 16,380.74 | 1183.98 | _ | 92.8 | _ |
| AB | 16,492.28 | 1295.52 | 8.61 | 92.2 | 0.6 |
| SF | 16,663.11 | 1466.35 | 19.26 | 91.2 | 1.6 |
| BL | 16,644.86 | 1448.1 | 18.24 | 91.3 | 1.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Asiminari, G.; Moysiadis, V.; Kateris, D.; Busato, P.; Wu, C.; Achillas, C.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Integrated Route-Planning System for Agricultural Robots. AgriEngineering 2024, 6, 657-677. https://doi.org/10.3390/agriengineering6010039
Asiminari G, Moysiadis V, Kateris D, Busato P, Wu C, Achillas C, Sørensen CG, Pearson S, Bochtis D. Integrated Route-Planning System for Agricultural Robots. AgriEngineering. 2024; 6(1):657-677. https://doi.org/10.3390/agriengineering6010039
Chicago/Turabian StyleAsiminari, Gavriela, Vasileios Moysiadis, Dimitrios Kateris, Patrizia Busato, Caicong Wu, Charisios Achillas, Claus Grøn Sørensen, Simon Pearson, and Dionysis Bochtis. 2024. "Integrated Route-Planning System for Agricultural Robots" AgriEngineering 6, no. 1: 657-677. https://doi.org/10.3390/agriengineering6010039
APA StyleAsiminari, G., Moysiadis, V., Kateris, D., Busato, P., Wu, C., Achillas, C., Sørensen, C. G., Pearson, S., & Bochtis, D. (2024). Integrated Route-Planning System for Agricultural Robots. AgriEngineering, 6(1), 657-677. https://doi.org/10.3390/agriengineering6010039