

Human–Robot Interaction through Dynamic Movement Recognition for Agricultural Environments

 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Overall System Architecture
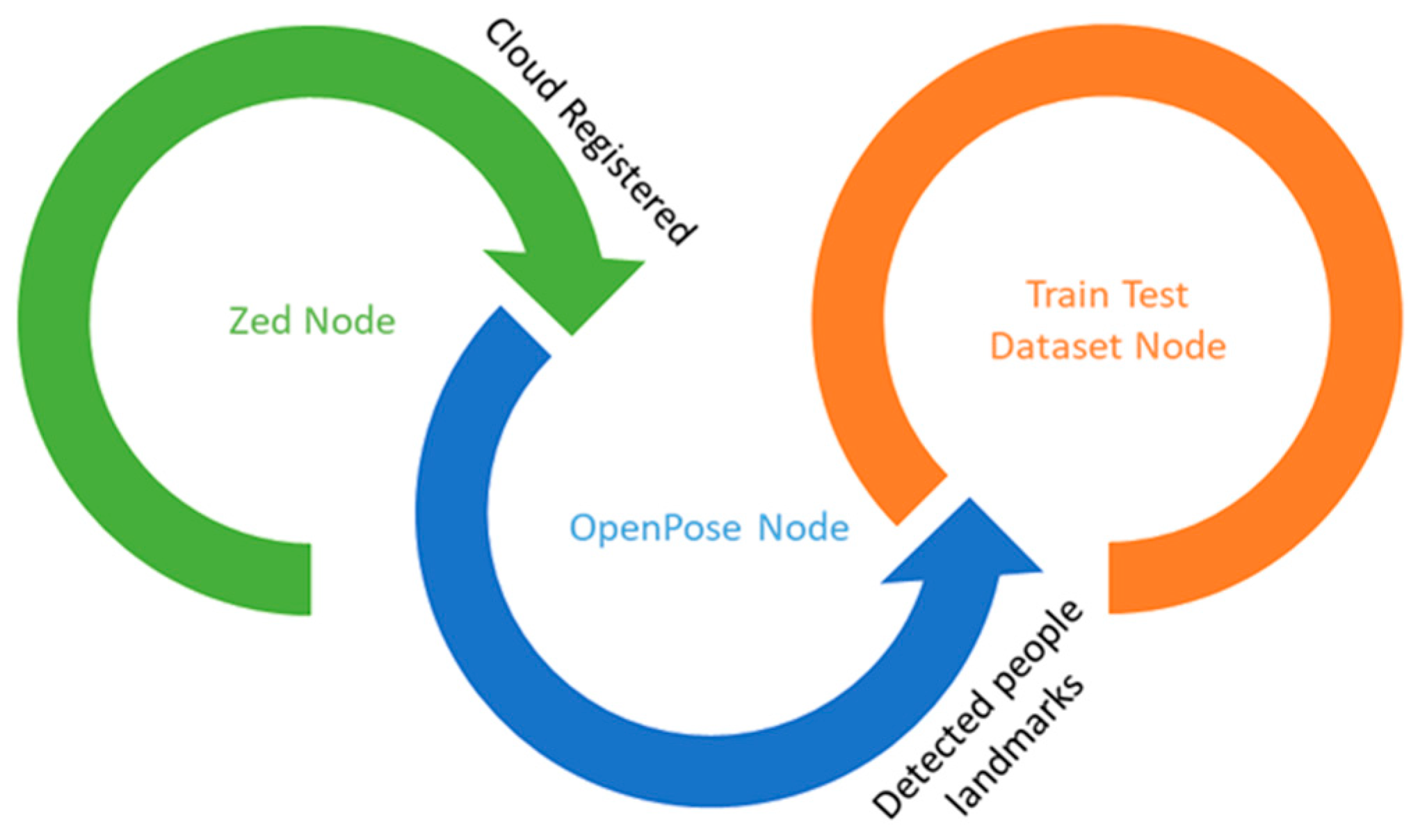
- The system exploits video frames as data input captured by a depth camera mounted on a UGV. These frames are transferred via a Robot Operating System (ROS) topic to an ROS node responsible for extracting the red–green–blue (RGB) and depth values from each frame. This separation of color information from depth facilitates analysis and preparation for the pose detection algorithm.
- As a next step, the OpenPose algorithm node is used, which takes both the RGB and depth channels as inputs in order to extract essential body joints from the video frames.
- The extracted body joints from the OpenPose algorithm are then fed into the ML algorithm for movement detection after passing the required data preprocessing phase.
- To communicate with the rest of the system, various ROS nodes were developed requiring the output of the ML algorithm.
- The ROS nodes are classified into two interconnected categories related to decision and action:
- (1)
- The first category is responsible for the decision-making process based on the output of the ML algorithm. These nodes interpret the movement recognition results and make decisions depending on the scenario. These decisions could involve controlling the robot or triggering specific actions based on the recognized movements. Throughout the entire data flow, communication between different nodes occurs through ROS topics and services. In general, ROS topics facilitate the exchange in data between nodes, while ROS services enable the request–response patterns, allowing nodes to request specific information or actions from other nodes [25].
- (2)
- The second category of nodes addresses UGV actions. These nodes are triggered by the decision-making nodes and integrate data from the Navigation Stack [32], sensor values, and key performance indicators (KPIs) related to the progress of each operation. Furthermore, the second category of nodes provides feedback to the decision-making nodes, ensuring that the UGV’s actions are continuously monitored and adjusted based on the feedback.
2.2. Movement Recognition
2.2.1. Data Input
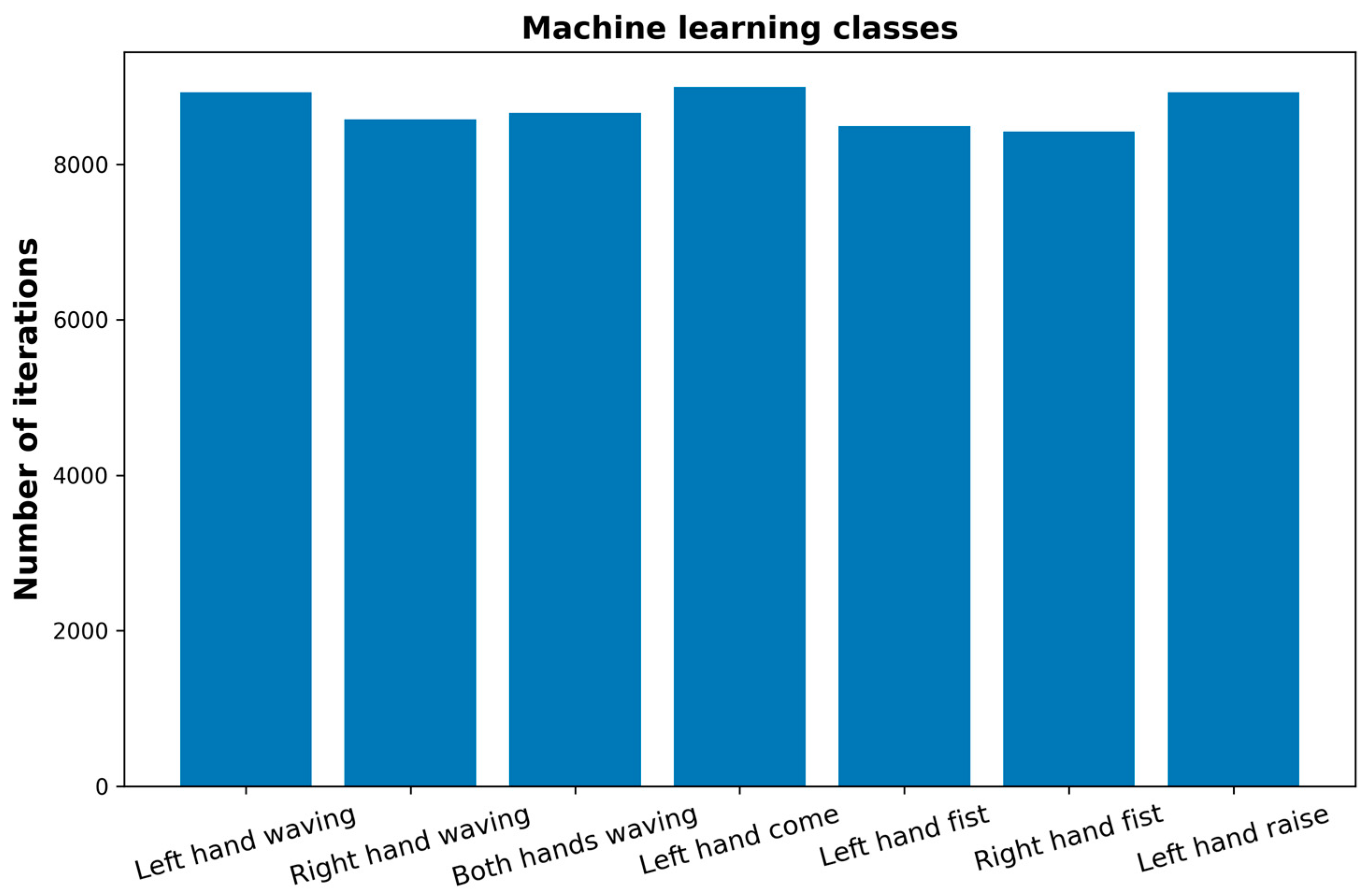
- “Left hand waving”: a repetitive leftward and rightward motion of the left hand;
- “Right hand waving”: a repetitive leftward and rightward motion of the right hand;
- “Both hands waving”: a repetitive leftward and rightward motion of both hands simultaneously;
- “Left hand come”: a beckoning motion with the left hand, moving toward the body;
- “Left hand fist”: the motion of clenching the left hand into a fist;
- “Right hand fist”: the motion of clenching the right hand into a fist;
- “Left hand raise”: an upward motion of the left hand, lifting it above shoulder level.
- “Standing”: the participant remains stationary in an upright position;
- “Walking”: the dynamic activity of the participant moving randomly in a walking motion.
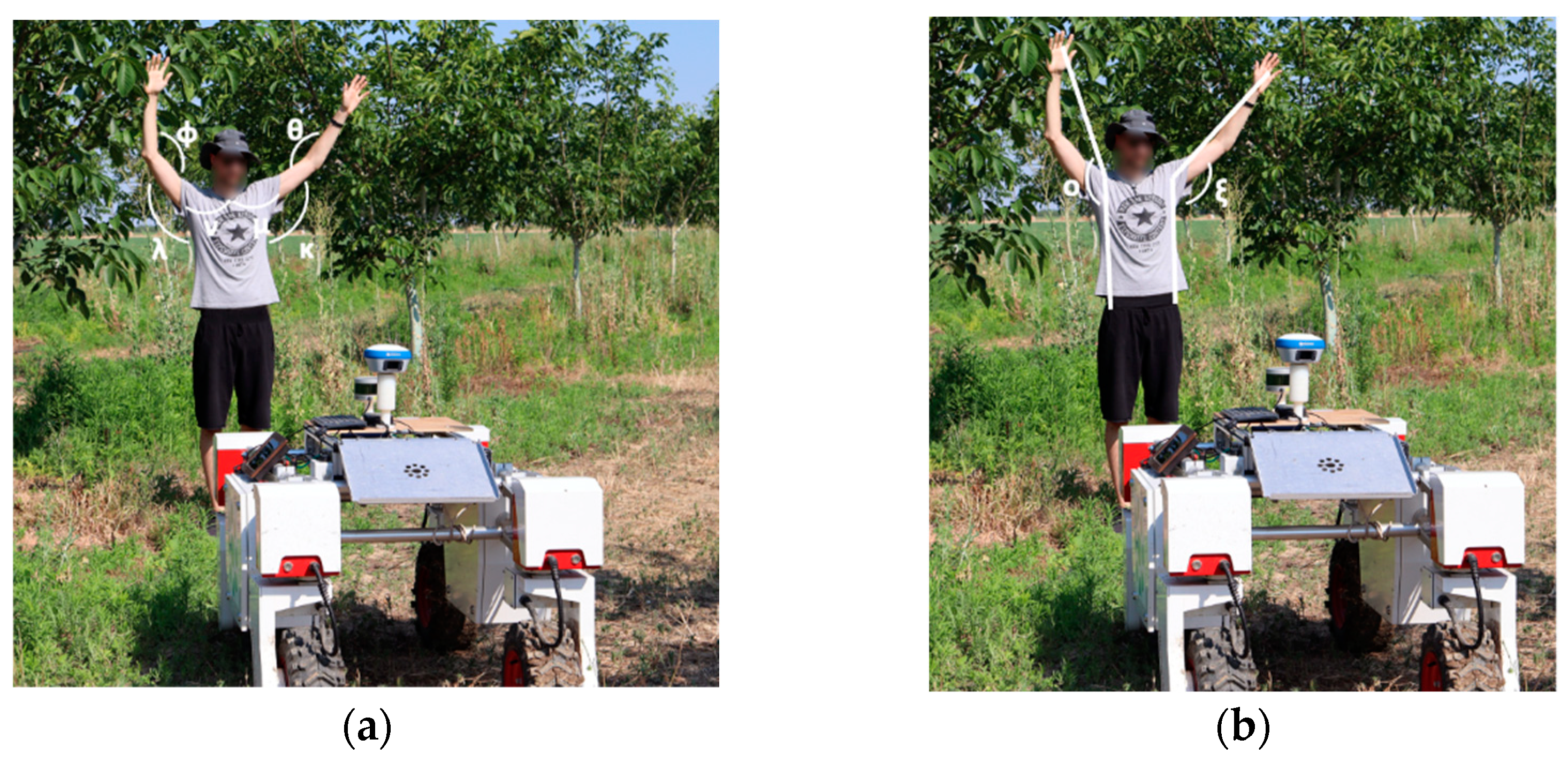
2.2.2. Prediction of Body Joint Positions
2.2.3. Class Balance
2.2.4. Tested Machine Learning Algorithms
- Logistic Regression (LR): This method estimates discrete values by analyzing independent variables, allowing the prediction of event likelihood by fitting data to a logit function.
- Linear Discriminant Analysis (LDA): LDA projects features from a higher-dimensional space to a lower-dimensional one, reducing dimensions without losing vital information.
- K-Nearest Neighbor (KNN): KNN is a pattern recognition algorithm that identifies the closest neighbors for future samples based on training datasets, making predictions according to similar instance characteristics.
- Classification and Regression Trees (CART): This tree-based model operates on “if–else” conditions, where decisions are made based on input feature values.
- Naive Bayes: Naive Bayes is a probabilistic classifier that assumes feature independence within a class, treating them as unrelated when making predictions.
- Support Vector Machine (SVM): SVM maps raw data points onto an n-dimensional space, facilitating effective data classification based on their spatial distribution in the transformed space.
- LSTM (Long Short-Term Memory): LSTM is a neural network architecture designed for processing sequential input. It addresses typical recurrent neural network (RNN) limitations by incorporating memory cells with input, forget, and output gates to selectively store, forget, and reveal information. This enables LSTM networks to capture long-term dependencies and retain contextual information across extended sequences. LSTM optimizes memory cells and gate settings through training via backpropagation through time (BPTT), making it highly effective for tasks requiring knowledge of sequential patterns and relationships.
2.2.5. Optimizing LSTM-Based Neural Network Model for Multiclass Classification: Architecture, Training, and Performance Enhancement
2.3. Allocation of Human Movement Detection
2.4. Autonomous Navigation
- Trajectory Rollout Planner (TRP): Ideal for outdoor settings, the TRP utilizes kinematic constraints to provide smooth trajectories. This planner effectively manages uneven terrain and various obstacles by evaluating different paths and selecting the one that avoids obstacles while maintaining smooth motion.
- TEB Planner: An extension of the EBand method, the TEB Planner considers a short distance ahead of the global plan and generates a local plan comprising a series of intermediate UGV positions. It is designed to work with dynamic obstacles and kinematic limitations common in outdoor environments. By optimizing both local and global paths, it balances obstacle avoidance with goal achievement. This planner’s ability to handle dynamic obstacles is particularly useful in outdoor settings where objects such as workers, livestock, animals, and agricultural equipment can move unpredictably.
- DWA Planner: While the DWA Planner is effective for dynamic obstacle avoidance, it may not handle complex outdoor terrains as efficiently as the TRP or TEB Planner. It focuses primarily on avoiding moving obstacles and might not perform as well in intricate outdoor scenarios.
2.5. Brief Description of the Implemented Scenarios
2.5.1. UGV Following Participant at a Safe Distance and Speed
2.5.2. GPS-Based UGV Navigation to a Predefined Site
2.5.3. Integrated Harvesting Scenario Demonstrating All the Developed HRI Capabilities
3. Results
3.1. Machine Learning Algorithms Performance Comparison for Classification of Human Movements
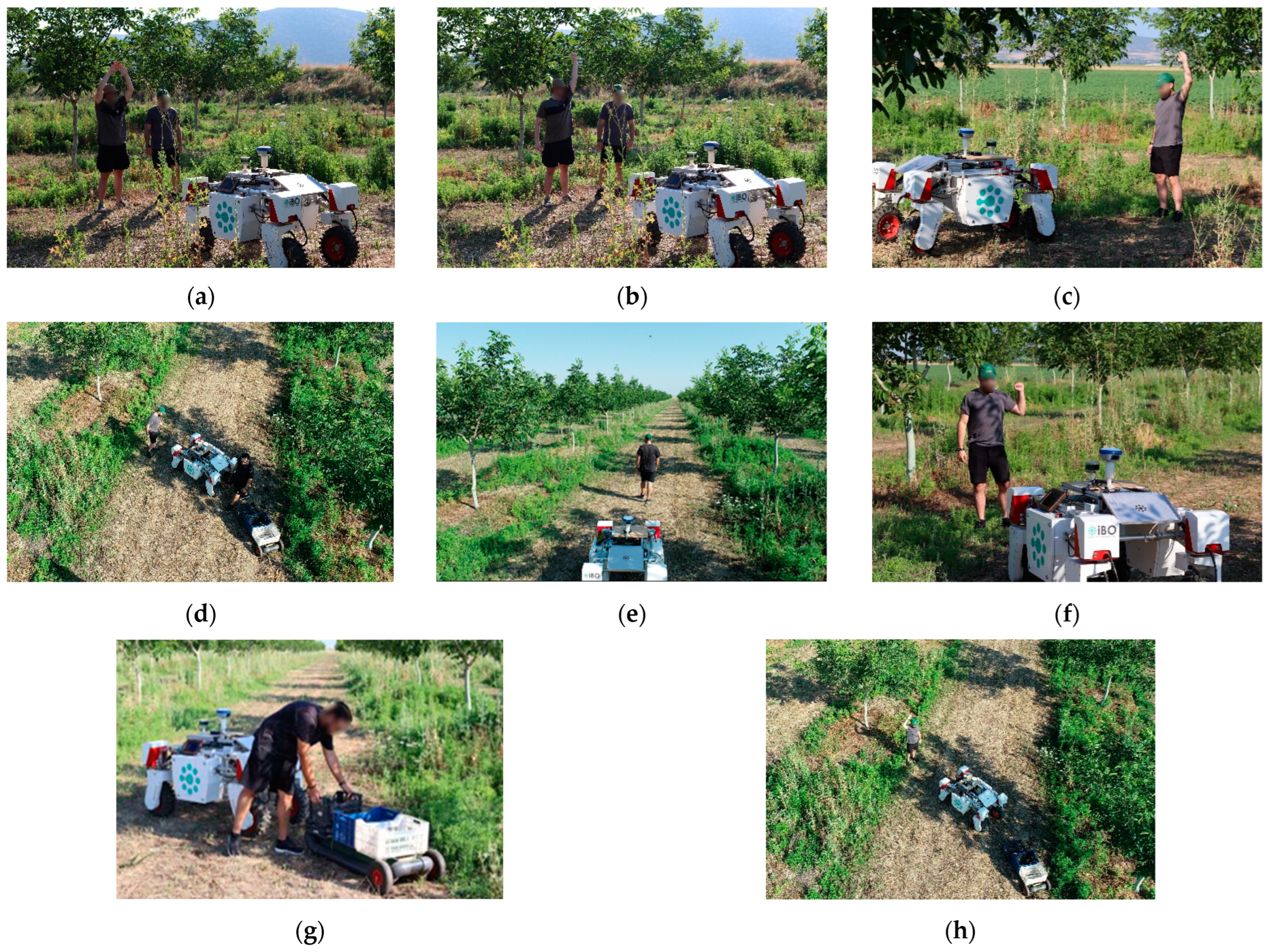
3.2. System Prototype Demonstration in Different Field Scenarios
3.2.1. UGV Following Participant at a Safe Distance and Speed
3.2.2. GPS-Based UGV Navigation to a Predefined Site
3.2.3. Integrated Harvesting Scenario Demonstrating All the Developed HRI Capabilities
4. Discussion and Conclusions
- Human movement detection: In particular, the “left hand come” gesture was proved to be the most demanding, as the hand’s position in front of the body presents challenges in identifying specific reference landmarks accurately. However, the integration of whole-body detection in conjunction with the LSTM classifier significantly enhanced the system’s ability to interpret and respond to these dynamic movements effectively.
- Environmental conditions and background complexity: Ensuring reliable human movement recognition across different environmental conditions, such as varying lighting and background complexity, posed a major challenge. Toward ensuring adaptability, the system was successfully tested in multiple environments, including different sites of the orchard during both sunny and cloudy days.
- Navigation and obstacle avoidance: The UGV’s ability to navigate autonomously to predetermined locations required precise programing to avoid obstacles and always keep a safe speed and distance. For this purpose, the right selection of needed sensors in combination with the exploitation of the capabilities of ROS Navigation Stack enabled global localization and safe GPS-based navigation.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Thakur, A.; Venu, S.; Gurusamy, M. An extensive review on agricultural robots with a focus on their perception systems. Comput. Electron. Agric. 2023, 212, 108146. [Google Scholar] [CrossRef]
- Abbasi, R.; Martinez, P.; Ahmad, R. The digitization of agricultural industry—A systematic literature review on agriculture 4.0. Smart Agric. Technol. 2022, 2, 100042. [Google Scholar] [CrossRef]
- Duong, L.N.K.; Al-Fadhli, M.; Jagtap, S.; Bader, F.; Martindale, W.; Swainson, M.; Paoli, A. A review of robotics and autonomous systems in the food industry: From the supply chains perspective. Trends Food Sci. Technol. 2020, 106, 355–364. [Google Scholar] [CrossRef]
- Xie, D.; Chen, L.; Liu, L.; Chen, L.; Wang, H. Actuators and Sensors for Application in Agricultural Robots: A Review. Machines 2022, 10, 913. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concepts and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations. Part 2: Operations and systems. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]
- Apraiz, A.; Lasa, G.; Mazmela, M. Evaluation of User Experience in Human–Robot Interaction: A Systematic Literature Review. Int. J. Soc. Robot. 2023, 15, 187–210. [Google Scholar] [CrossRef]
- Abdulazeem, N.; Hu, Y. Human Factors Considerations for Quantifiable Human States in Physical Human–Robot Interaction: A Literature Review. Sensors 2023, 23, 7381. [Google Scholar] [CrossRef]
- Semeraro, F.; Griffiths, A.; Cangelosi, A. Human–robot collaboration and machine learning: A systematic review of recent research. Robot. Comput. Integr. Manuf. 2023, 79, 102432. [Google Scholar] [CrossRef]
- Tagarakis, A.C.; Benos, L.; Kyriakarakos, G.; Pearson, S.; Sørensen, C.G.; Bochtis, D. Digital Twins in Agriculture and Forestry: A Review. Sensors 2024, 24, 3117. [Google Scholar] [CrossRef]
- Camarena, F.; Gonzalez-Mendoza, M.; Chang, L.; Cuevas-Ascencio, R. An Overview of the Vision-Based Human Action Recognition Field. Math. Comput. Appl. 2023, 28, 61. [Google Scholar] [CrossRef]
- Benos, L.; Bechar, A.; Bochtis, D. Safety and ergonomics in human-robot interactive agricultural operations. Biosyst. Eng. 2020, 200, 55–72. [Google Scholar] [CrossRef]
- Obrenovic, B.; Gu, X.; Wang, G.; Godinic, D.; Jakhongirov, I. Generative AI and human–robot interaction: Implications and future agenda for business, society and ethics. AI Soc. 2024. [Google Scholar] [CrossRef]
- Marinoudi, V.; Lampridi, M.; Kateris, D.; Pearson, S.; Sørensen, C.G.; Bochtis, D. The future of agricultural jobs in view of robotization. Sustainability 2021, 13, 12109. [Google Scholar] [CrossRef]
- Benos, L.; Moysiadis, V.; Kateris, D.; Tagarakis, A.C.; Busato, P.; Pearson, S.; Bochtis, D. Human-Robot Interaction in Agriculture: A Systematic Review. Sensors 2023, 23, 6776. [Google Scholar] [CrossRef] [PubMed]
- Aivazidou, E.; Tsolakis, N. Transitioning towards human–robot synergy in agriculture: A systems thinking perspective. Syst. Res. Behav. Sci. 2023, 40, 536–551. [Google Scholar] [CrossRef]
- Adamides, G.; Edan, Y. Human–robot collaboration systems in agricultural tasks: A review and roadmap. Comput. Electron. Agric. 2023, 204, 107541. [Google Scholar] [CrossRef]
- Lytridis, C.; Kaburlasos, V.G.; Pachidis, T.; Manios, M.; Vrochidou, E.; Kalampokas, T.; Chatzistamatis, S. An Overview of Cooperative Robotics in Agriculture. Agronomy 2021, 11, 1818. [Google Scholar] [CrossRef]
- Yerebakan, M.O.; Hu, B. Human–Robot Collaboration in Modern Agriculture: A Review of the Current Research Landscape. Adv. Intell. Syst. 2024, 6, 2300823. [Google Scholar] [CrossRef]
- Vasconez, J.P.; Kantor, G.A.; Auat Cheein, F.A. Human–robot interaction in agriculture: A survey and current challenges. Biosyst. Eng. 2019, 179, 35–48. [Google Scholar] [CrossRef]
- Bonarini, A. Communication in Human-Robot Interaction. Curr. Robot. Rep. 2020, 1, 279–285. [Google Scholar] [CrossRef] [PubMed]
- Robinson, F.; Pelikan, H.; Watanabe, K.; Damiano, L.; Bown, O.; Velonaki, M. Introduction to the Special Issue on Sound in Human-Robot Interaction. J. Hum.-Robot Interact. 2023, 12, 1–5. [Google Scholar] [CrossRef]
- Ren, Q.; Hou, Y.; Botteldooren, D.; Belpaeme, T. No More Mumbles: Enhancing Robot Intelligibility Through Speech Adaptation. IEEE Robot. Autom. Lett. 2024, 9, 6162–6169. [Google Scholar] [CrossRef]
- Wuth, J.; Correa, P.; Núñez, T.; Saavedra, M.; Yoma, N.B. The Role of Speech Technology in User Perception and Context Acquisition in HRI. Int. J. Soc. Robot. 2021, 13, 949–968. [Google Scholar] [CrossRef]
- Moysiadis, V.; Katikaridis, D.; Benos, L.; Busato, P.; Anagnostis, A.; Kateris, D.; Pearson, S.; Bochtis, D. An Integrated Real-Time Hand Gesture Recognition Framework for Human-Robot Interaction in Agriculture. Appl. Sci. 2022, 12, 8160. [Google Scholar] [CrossRef]
- Tagarakis, A.C.; Benos, L.; Aivazidou, E.; Anagnostis, A.; Kateris, D.; Bochtis, D. Wearable Sensors for Identifying Activity Signatures in Human-Robot Collaborative Agricultural Environments. Eng. Proc. 2021, 9, 9005. [Google Scholar] [CrossRef]
- Tagarakis, A.C.; Filippou, E.; Kalaitzidis, D.; Benos, L.; Busato, P.; Bochtis, D. Proposing UGV and UAV Systems for 3D Mapping of Orchard Environments. Sensors 2022, 22, 1571. [Google Scholar] [CrossRef] [PubMed]
- Niu, H.; Chen, Y. The Unmanned Ground Vehicles (UGVs) for Digital Agriculture. In Smart Big Data in Digital Agriculture Applications: Acquisition, Advanced Analytics, and Plant Physiology-Informed Artificial Intelligence; Niu, H., Chen, Y., Eds.; Springer: Cham, Switzerland, 2024; pp. 99–109. ISBN 978-3-031-52645-9. [Google Scholar]
- Rondelli, V.; Franceschetti, B.; Mengoli, D. A Review of Current and Historical Research Contributions to the Development of Ground Autonomous Vehicles for Agriculture. Sustainability 2022, 14, 9221. [Google Scholar] [CrossRef]
- Gokul, S.; Dhiksith, R.; Sundaresh, S.A.; Gopinath, M. Gesture Controlled Wireless Agricultural Weeding Robot. In Proceedings of the 2019 5th International Conference on Advanced Computing & Communication Systems (ICACCS), Coimbatore, India, 15–16 March 2019; pp. 926–929. [Google Scholar]
- Yang, Z.; Jiang, D.; Sun, Y.; Tao, B.; Tong, X.; Jiang, G.; Xu, M.; Yun, J.; Liu, Y.; Chen, B.; et al. Dynamic Gesture Recognition Using Surface EMG Signals Based on Multi-Stream Residual Network. Front. Bioeng. Biotechnol. 2021, 9, 779353. [Google Scholar] [CrossRef]
- Navigation: Package Summary. Available online: https://www.opera.com/client/upgraded (accessed on 28 June 2022).
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.-E.; Sheikh, Y. OpenPose: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields. arXiv 2019, arXiv:1812.08008. [Google Scholar] [CrossRef]
- Dash, S.S.; Nayak, S.K.; Mishra, D. A review on machine learning algorithms. In Proceedings of the Smart Innovation, Systems and Technologies; Springer Science and Business Media, Faridabad, India, 14–16 February 2019; Deutschland GmbH: Berlin, Germany, 2021; Volume 153, pp. 495–507. [Google Scholar]
- Arno, S.; Bell, C.P.; Alaia, M.J.; Singh, B.C.; Jazrawi, L.M.; Walker, P.S.; Bansal, A.; Garofolo, G.; Sherman, O.H. Does Anteromedial Portal Drilling Improve Footprint Placement in Anterior Cruciate Ligament Reconstruction? Clin. Orthop. Relat. Res. 2016, 474, 1679–1689. [Google Scholar] [CrossRef]
- Labarrière, F.; Thomas, E.; Calistri, L.; Optasanu, V.; Gueugnon, M.; Ornetti, P.; Laroche, D. Machine Learning Approaches for Activity Recognition and/or Activity Prediction in Locomotion Assistive Devices—A Systematic Review. Sensors 2020, 20, 6345. [Google Scholar] [CrossRef] [PubMed]
- Attri, I.; Awasthi, L.K.; Sharma, T.P. Machine learning in agriculture: A review of crop management applications. Multimed. Tools Appl. 2024, 83, 12875–12915. [Google Scholar] [CrossRef]
- Pulver, A.; Lyu, S. LSTM with working memory. In Proceedings of the 2017 International Joint Conference on Neural Networks (IJCNN), Anchorage, AK, USA, 14–19 May 2017; pp. 845–851. [Google Scholar]
- Benos, L.; Sørensen, C.G.; Bochtis, D. Field Deployment of Robotic Systems for Agriculture in Light of Key Safety, Labor, Ethics and Legislation Issues. Curr. Robot. Rep. 2022, 3, 49–56. [Google Scholar] [CrossRef]
- Müller, M.; Ruppert, T.; Jazdi, N.; Weyrich, M. Self-improving situation awareness for human–robot-collaboration using intelligent Digital Twin. J. Intell. Manuf. 2024, 35, 2045–2063. [Google Scholar] [CrossRef]
- Liu, Z.; Lü, Z.; Zheng, W.; Zhang, W.; Cheng, X. Design of obstacle avoidance controller for agricultural tractor based on ROS. Int. J. Agric. Biol. Eng. 2019, 12, 58–65. [Google Scholar] [CrossRef]
- Gurevin, B.; Gulturk, F.; Yildiz, M.; Pehlivan, I.; Nguyen, T.T.; Caliskan, F.; Boru, B.; Yildiz, M.Z. A Novel GUI Design for Comparison of ROS-Based Mobile Robot Local Planners. IEEE Access 2023, 11, 125738–125748. [Google Scholar] [CrossRef]
- Zheng, K. ROS Navigation Tuning Guide. In Robot Operating System (ROS): The Complete Reference; Koubaa, A., Ed.; Springer: Cham, Switzerland, 2021; Volume 6, pp. 197–226. ISBN 978-3-030-75472-3. [Google Scholar]
- ROS 2 Documentation: Navfn. Available online: http://wiki.ros.org/navfn (accessed on 30 May 2024).
- Cybulski, B.; Wegierska, A.; Granosik, G. Accuracy comparison of navigation local planners on ROS-based mobile robot. In Proceedings of the 2019 12th International Workshop on Robot Motion and Control (RoMoCo), Poznan, Poland, 8–10 July 2019; pp. 104–111. [Google Scholar]
- Min, S.K.; Delgado, R.; Byoung, W.C. Comparative study of ROS on embedded system for a mobile robot. J. Autom. Mob. Robot. Intell. Syst. 2018, 12, 61–67. [Google Scholar]
- Guo, L.; Lu, Z.; Yao, L. Human-Machine Interaction Sensing Technology Based on Hand Gesture Recognition: A Review. IEEE Trans. Hum.-Mach. Syst. 2021, 51, 300–309. [Google Scholar] [CrossRef]
- Akalin, N.; Kristoffersson, A.; Loutfi, A. Do you feel safe with your robot? Factors influencing perceived safety in human-robot interaction based on subjective and objective measures. Int. J. Hum. Comput. Stud. 2022, 158, 102744. [Google Scholar] [CrossRef]
- Zhao, J.; Lv, Y.; Zeng, Q.; Wan, L. Online Policy Learning-Based Output-Feedback Optimal Control of Continuous-Time Systems. IEEE Trans. Circuits Syst. II Express Briefs 2024, 71, 652–656. [Google Scholar] [CrossRef]
- Rani, G.J.; Hashmi, M.F.; Gupta, A. Surface Electromyography and Artificial Intelligence for Human Activity Recognition—A Systematic Review on Methods, Emerging Trends Applications, Challenges, and Future Implementation. IEEE Access 2023, 11, 105140–105169. [Google Scholar] [CrossRef]
- Mekruksavanich, S.; Jantawong, P.; Hnoohom, N.; Jitpattanakul, A. Human Activity Recognition for People with Knee Abnormality Using Surface Electromyography and Knee Angle Sensors. In Proceedings of the 2023 Joint International Conference on Digital Arts, Media and Technology with ECTI Northern Section Conference on Electrical, Electronics, Computer and Telecommunications Engineering (ECTI DAMT & NCON), Phuket, Thailand, 22–25 March 2023; pp. 483–487. [Google Scholar]
- Ovur, S.E.; Zhou, X.; Qi, W.; Zhang, L.; Hu, Y.; Su, H.; Ferrigno, G.; De Momi, E. A novel autonomous learning framework to enhance sEMG-based hand gesture recognition using depth information. Biomed. Signal Process. Control 2021, 66, 102444. [Google Scholar] [CrossRef]
- Luo, X.; Zhu, S.; Song, Z. Quantifying the Income-Increasing Effect of Digital Agriculture: Take the New Agricultural Tools of Smartphone as an Example. Int. J. Environ. Res. Public Health 2023, 20, 3127. [Google Scholar] [CrossRef]
- Qi, W.; Wang, N.; Su, H.; Aliverti, A. DCNN based human activity recognition framework with depth vision guiding. Neurocomputing 2022, 486, 261–271. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Recognized Human Movement | Corresponding Class | UGV Action |
|---|---|---|
| “Right hand waving” | 0 | Initiate autonomous navigation to a predefined location |
| “Left hand waving” | 1 | Lock identified person |
| “Both hand waving” | 2 | Stop all active scenarios |
| “Left hand come” | 3 | Follow the participant |
| “Left hand fist” | 4 | Pause following mode |
| “Right hand fist” | 5 | Return to the location that the autonomous navigation was initiated |
| “Left hand raise” | 6 | Unlock identified participant |
| “Standing” | 7 | Detect upright posture |
| “Walking” | 8 | Detect walking activity |
| Algorithm | Precision | Recall | F1-Score |
|---|---|---|---|
| LR | 0.866 | 0.863 | 0.862 |
| LDA | 0.9135 | 0.883 | 0.879 |
| KNN | 0.871 | 0.842 | 0.838 |
| CART | 0.765 | 0.698 | 0.686 |
| NB | 0.108 | 0.328 | 0.162 |
| SVM | 0.871 | 0.842 | 0.838 |
| LSTM | 0.912 | 0.95 | 0.90 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moysiadis, V.; Benos, L.; Karras, G.; Kateris, D.; Peruzzi, A.; Berruto, R.; Papageorgiou, E.; Bochtis, D. Human–Robot Interaction through Dynamic Movement Recognition for Agricultural Environments. AgriEngineering 2024, 6, 2494-2512. https://doi.org/10.3390/agriengineering6030146
Moysiadis V, Benos L, Karras G, Kateris D, Peruzzi A, Berruto R, Papageorgiou E, Bochtis D. Human–Robot Interaction through Dynamic Movement Recognition for Agricultural Environments. AgriEngineering. 2024; 6(3):2494-2512. https://doi.org/10.3390/agriengineering6030146
Chicago/Turabian StyleMoysiadis, Vasileios, Lefteris Benos, George Karras, Dimitrios Kateris, Andrea Peruzzi, Remigio Berruto, Elpiniki Papageorgiou, and Dionysis Bochtis. 2024. "Human–Robot Interaction through Dynamic Movement Recognition for Agricultural Environments" AgriEngineering 6, no. 3: 2494-2512. https://doi.org/10.3390/agriengineering6030146
APA StyleMoysiadis, V., Benos, L., Karras, G., Kateris, D., Peruzzi, A., Berruto, R., Papageorgiou, E., & Bochtis, D. (2024). Human–Robot Interaction through Dynamic Movement Recognition for Agricultural Environments. AgriEngineering, 6(3), 2494-2512. https://doi.org/10.3390/agriengineering6030146