
Urban Air Mobility for Last-Mile Transportation: A Review




Abstract
1. Introduction
- Presenting an OR-based classification framework by exploring the optimization problems (models) and solution methods in the literature of the applications of UAM solutions, e.g., eVTOLs and UAVs in last-mile transportation.
- Identifying the gaps in the existing knowledge and offering potential directions for future research by classifying the collected papers through a generic framework.
- Establishing a common understanding of the UAM system between various academic fields, including aerospace engineering, urban planning, and OR.
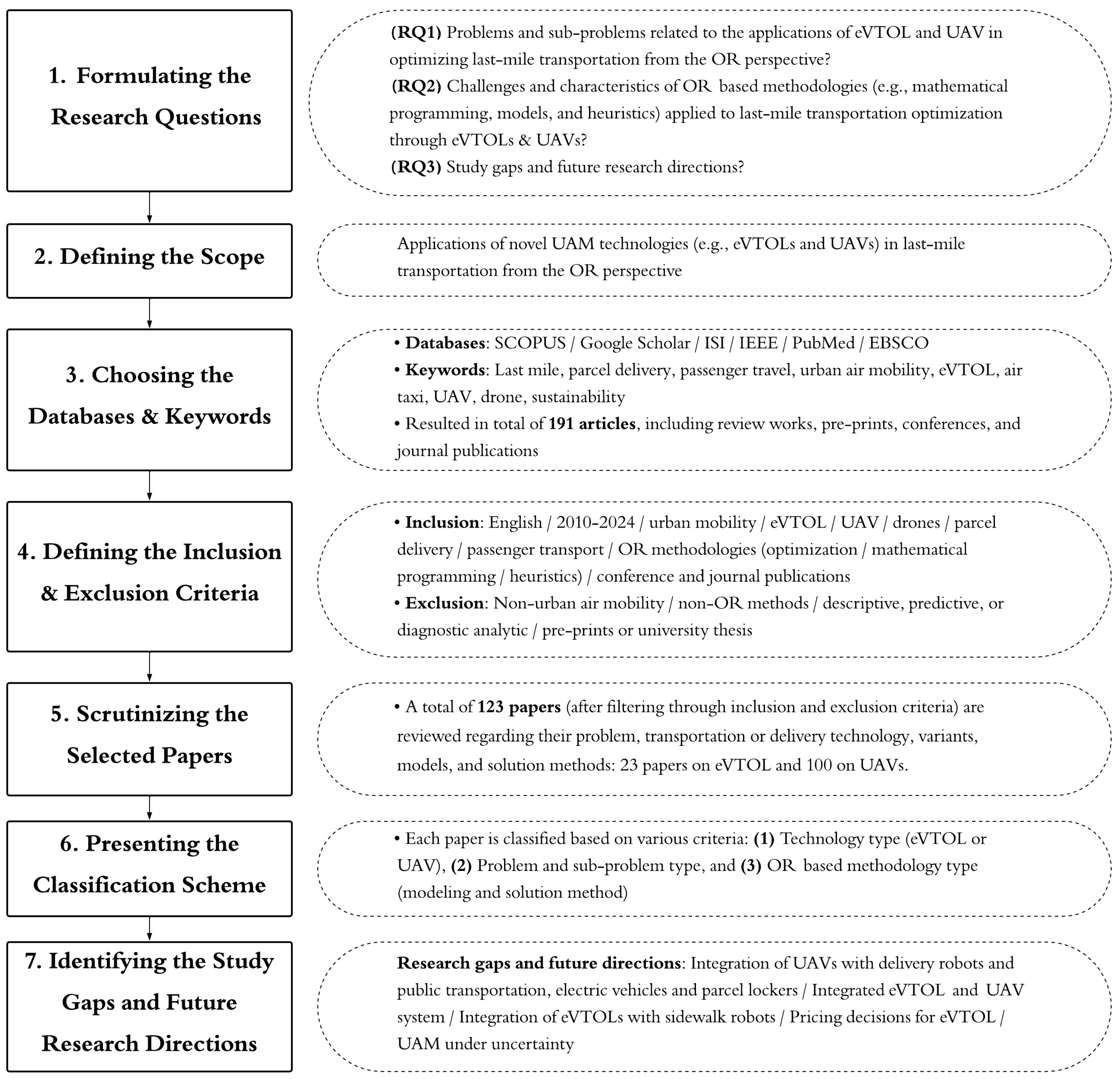
2. Review Methodology
- Formulating research questions (Section 2.1): we began by defining our research questions and establishing the foundation for our investigation.
- Determining scope (Section 2.2): we outlined the boundaries and scope of our study, delineating the specific areas and topics under examination.
- Database and keyword selection (Section 2.3): we identified the databases for sourcing the relevant literature and established a set of keywords and search terms to guide our information retrieval process.
- Establishing inclusion and exclusion criteria (Section 2.4): we laid out the criteria that would be used to include or exclude papers from our review, ensuring a structured and consistent selection process.
- Review and paper selection: we systematically reviewed the available literature and selected the most pertinent papers based on our established criteria.
- Defining a classification scheme (Section 2.5): we developed a classification framework to categorize the selected papers, facilitating a structured analysis of the research findings.
- Analysis, gap identification, and future research directions: finally, we conducted a thorough qualitative analysis (specifically, content and thematic analysis) of the selected papers according to the proposed classification scheme (previous step), identified research gaps, and proposed directions for future research, as outlined in Section 5.
2.1. Research Questions
- (RQ1) What are the primary problems and subproblems related to the applications of eVTOLs and UAVs (UAM technologies) in optimizing last-mile transportation from the OR perspective?
- (RQ2) What challenges and characteristics are associated with implementing the OR-based methodologies (like mathematical programming, models, and solution methods) in last-mile transportation optimization through applying the eVTOLs and UAVs?
- (RQ3) What research directions and gaps exist in utilizing UAM solutions for last-mile transportation from the OR perspective?
2.2. Scope
2.3. Database and Keywords Selection
- “Last mile”; “parcel delivery”; “urban air mobility”; “eVTOL”; “sustainability”.
- “Last mile”; “parcel delivery”; “urban air mobility”; “air taxi”; “sustainability”.
- “Last mile”; “parcel delivery”; “urban air mobility”; “UAV”; “drone”; “sustainability”.
- “Last mile”; “passenger travel”; “urban air mobility”; “eVTOL”; “sustainability”.
- “Last mile”; “passenger travel”; “urban air mobility”; “air taxi”; “sustainability”.
- “Last mile”; “passenger travel”; “urban air mobility”; “UAV”; “drone”; “sustainability”.
2.4. Criteria for Inclusion and Exclusion
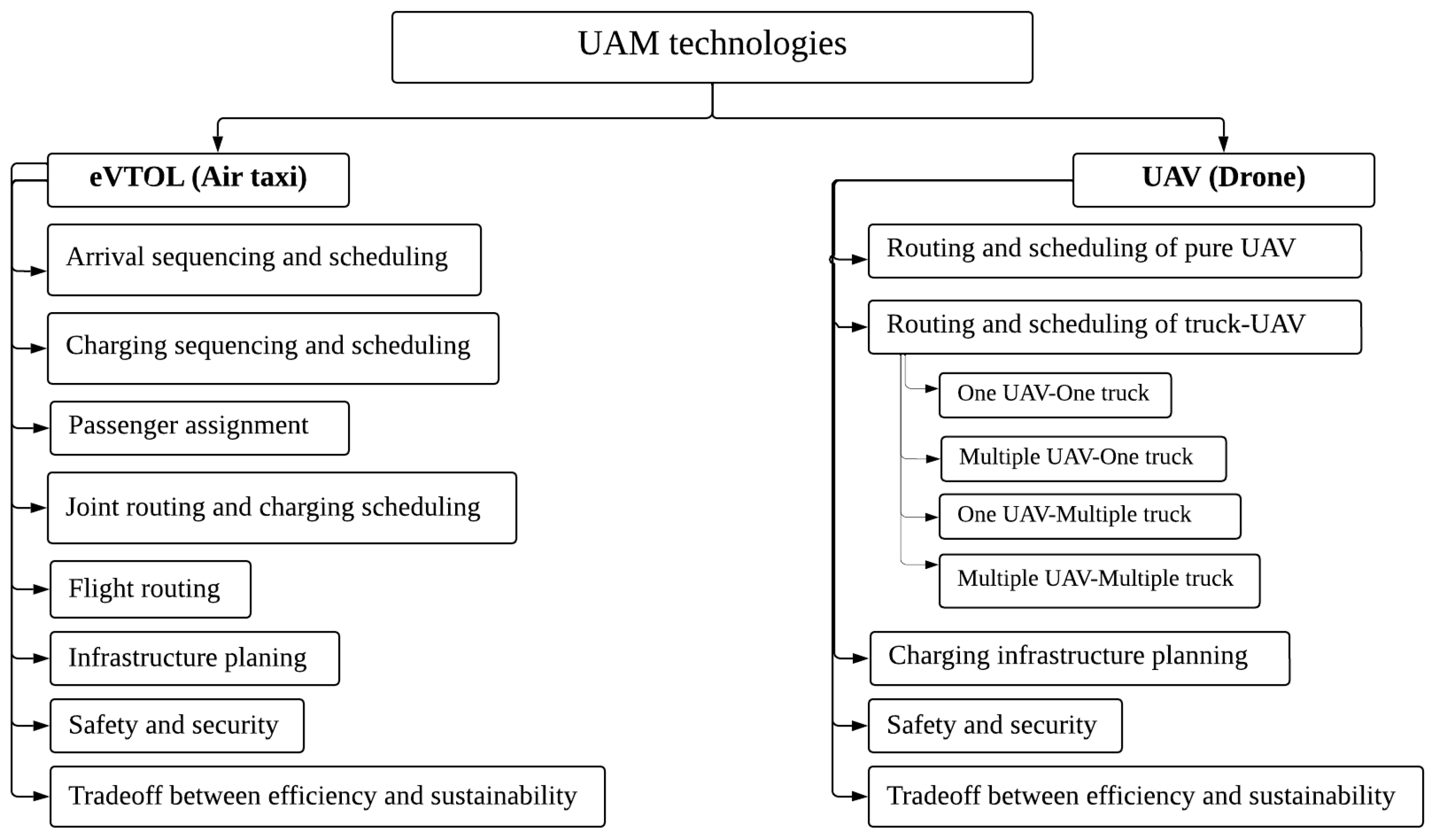
2.5. Classification Scheme
3. eVTOLs
3.1. Technological Background
3.2. Arrival Sequencing and Scheduling Problem
3.3. Charging Sequencing and Scheduling Problem
3.4. Passenger Assignment to Aerial Vehicles
3.5. Joint Routing and Charging Scheduling Problem
3.6. Flight Routing of eVTOLs
3.7. Infrastructure Planning
3.8. Safety and Security
3.9. Trade-off between Efficiency and Sustainability
4. UAVs
4.1. Routing and Scheduling of Pure UAV Delivery System
4.2. Routing and Scheduling of Truck-UAV Delivery System
4.3. One UAV–One Truck
4.3.1. Multiple UAV–One Truck
4.3.2. One UAV–Multiple Truck
4.3.3. Multiple UAV–Multiple Truck
4.4. Charging Infrastructure Planning
4.4.1. Charging Station Location
4.4.2. Charging Station Capacity
4.5. Safety and Security
4.6. Trade-off between Efficiency and Sustainability
5. Discussion and Future Directions
5.1. Integration of UAVs with Delivery Robots
5.2. Integration of UAVs with Public Transportation
5.3. Integration of UAVs with Electric Vehicles and Parcel Lockers
5.4. An Integrated eVTOL and UAV Transportation System
5.5. Integration of eVTOLs with Sidewalk Robots
5.6. Pricing Decisions for eVTOL
5.7. UAM Optimization with Modern Methodologies
5.8. UAM under Uncertainty
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAM | Urban air mobility |
| AAM | Advanced air mobility |
| eVTOL | Electric vertical takeoff and landing |
| UAV | Unmanned aerial vehicle |
| OR | Operations research |
| O-D | Origin and destination |
| LMT | Last-mile travel |
| LMD | Last-mile delivery |
| UPS | United Parcel Service |
| RTA | Required time of arrival |
| ASSP-eVTOL | Arrival sequencing and scheduling problem of eVTOL |
| ACS | Adaptive control system |
| TLOF | Touchdown and lift-off |
| ILS | Insertion and local search |
| MILP | Mixed-integer linear programming |
| TA | Time advance |
| ETA | Estimated time of arrival |
| MVS | Multivertiport system |
| CSSP | Charging sequencing and scheduling problem |
| AV | Aerial vehicle |
| ILP | Integer linear program |
| EAV | Electric aerial vehicles |
| RCSP | Routing and charging scheduling problem |
| VRP-TW | Vehicle routing problem with time windows |
| ARP | Aircraft recovery problem |
| NSGA-II | Nondominated sorting genetic algorithm II |
| LODES | LEHD Origin-Destination Employment Statistics |
| AmCS | American Community Survey |
| UAS | Unmanned aerial system |
| UAT | Urban air taxi |
| ATM | Air traffic management |
| FAA | Federal Aviation Administration |
| VDP | Vertiport design problem |
| CLARA | Clustering large applications |
| GA | Genetic algorithms |
| MTVRP | Multitrip VRP |
| VRP | Vehicle routing problem |
| DDP | Drone delivery problem |
| FLP | Facility location problem |
| BCR | Battery consumption rate |
| GV | Ground vehicle |
| TSP | Traveling salesman problem |
| FSTSP | Flying sidekick TSP |
| TSP-D | TSP with drones |
| DP | Dynamic programming |
| GRASP | Greedy randomized adaptive search procedure |
| TSP-DS | TSP with a drone station |
| PDSTSP | Parallel drone scheduling TSP |
| DC | Distribution center |
| m-FSTSP | Multiple-FSTSP |
| mTSP-mD | Multivisit (multiple drops) TSP-mD |
| LARO | Launch and recovery operations |
| VNS | Variable neighborhood search |
| SA | Simulated annealing |
| VRPD | VRP with a single drone |
| ALNS | Adaptive large neighborhood search |
| TS | Tabu search |
| m-TSP-D | Multiple TSP-D |
| m-TSP | Multiple TSP |
| ADI | Adaptive insertion heuristic |
| mTSP-DS | Multiple TSP with drone stations |
| VRP-D | VRP with drones |
| TD-DRP | Truck-based drone delivery routing problem |
| ACO | Ant colony optimization |
| TDRP-TW | Truck–drone routing problem with time windows |
| H-DTRP | Heterogeneous drone–truck routing problem |
| TDHRP-TDRTT | Truck–drone hybrid routing problem with time-dependent road travel time |
| SDDPVD | Same-day delivery problems with vehicles and drones |
| CP | Constraint programming |
| 2E-GU-RP | Two-echelon cooperated routing problem with GV and UAV |
| HVDRP | Hybrid vehicle–drone routing problem |
| 2EVRPD | Two-echelon VRP-D |
| DTRC | Drone truck route construction |
| 2E-RPTD | Two-echelon routing problem for truck and drone |
| 2EVRP | Two-echelon VRP |
| 2E-LRP | Two-echelon location routing problem |
| 2E-LRPD | 2E-LRP with drones |
| JRCS | Joint routing and charging strategy |
| CS | Charging station |
| ABSM | Automated battery swapping machines |
| NLP | Nonlinear programming |
| MCFLPD | Maximum coverage facility location problem with drones |
| 3SH | Three-stage heuristic |
| LCA | Life cycle assessment |
| RADR | Road autonomous delivery robot |
| FOT | Freight on transit |
| PL | Parcel locker |
| EV | Electric vehicle |
| SADR | Sidewalk autonomous delivery robot |
References
- WindRiver.com. What Is Urban Air Mobility? 2023. Available online: https://www.windriver.com/solutions/learning/urban-air-mobility (accessed on 10 October 2023).
- Schrank, D.; Eisele, B.; Lomax, T.; Bak, J. 2015 Urban Mobility Scorecard; Texas Transportation Institute, INRIX, Inc.: College Station, TX, USA, 2015. [Google Scholar]
- Wang, K.; Li, A.; Qu, X. Urban aerial mobility: Network structure, transportation benefits, and Sino-US comparison. Innovation 2023, 4, 100393. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, S.S.; Fountas, G.; Eker, U.; Still, S.E.; Anastasopoulos, P.C. An exploratory empirical analysis of willingness to hire and pay for flying taxis and shared flying car services. J. Air Transp. Manag. 2021, 90, 101963. [Google Scholar] [CrossRef]
- BuiltIn.com. What Are eVTOLs? Are They the Future of Aviation? 2023. Available online: https://builtin.com/transportation-tech/evtol-aircraft (accessed on 15 October 2023).
- eVTOLNews. Beta Technologies ALIA-250. 2023. Available online: https://evtol.news/beta-technologies-alia/ (accessed on 21 December 2023).
- insiderintelligence.com. Last-Mile Delivery: What It Is and What It Means for Retailers. 2023. Available online: https://www.insiderintelligence.com/insights/last-mile-delivery-shipping-explained/ (accessed on 15 October 2023).
- Boysen, N.; Fedtke, S.; Schwerdfeger, S. Last-mile delivery concepts: A survey from an operational research perspective. OR Spectr. 2021, 43, 1–58. [Google Scholar] [CrossRef]
- Polaczyk, N.; Trombino, E.; Wei, P.; Mitici, M. A review of current technology and research in urban on-demand air mobility applications. In Proceedings of the 8th Biennial Autonomous VTOL Technical Meeting and 6th Annual Electric VTOL Symposium, Mesa, AZ, USA, 28 January–1 February 2019; pp. 333–343. [Google Scholar]
- Sun, X.; Wandelt, S.; Husemann, M.; Stumpf, E. Operational considerations regarding on-demand air mobility: A literature review and research challenges. J. Adv. Transp. 2021, 2021, 3591034. [Google Scholar] [CrossRef]
- Cohen, A.P.; Shaheen, S.A.; Farrar, E.M. Urban air mobility: History, ecosystem, market potential, and challenges. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6074–6087. [Google Scholar] [CrossRef]
- Brunelli, M.; Ditta, C.C.; Postorino, M.N. New infrastructures for Urban Air Mobility systems: A systematic review on vertiport location and capacity. J. Air Transp. Manag. 2023, 112, 102460. [Google Scholar] [CrossRef]
- Garrow, L.A.; German, B.J.; Leonard, C.E. Urban air mobility: A comprehensive review and comparative analysis with autonomous and electric ground transportation for informing future research. Transp. Res. Part C Emerg. Technol. 2021, 132, 103377. [Google Scholar] [CrossRef]
- Wang, L.; Deng, X.; Gui, J.; Jiang, P.; Zeng, F.; Wan, S. A review of Urban Air Mobility-Enabled Intelligent Transportation Systems: Mechanisms, Applications and Challenges. J. Syst. Archit. 2023, 141, 102902. [Google Scholar] [CrossRef]
- Krull, L.F.; Muhammad, B. Urban Air Mobility: Insights into Potentials and Challenges. In Proceedings of the 2022 25th International Symposium on Wireless Personal Multimedia Communications (WPMC), Herning, Denmark, 30 October–2 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 267–272. [Google Scholar]
- Rajendran, S.; Srinivas, S. Air taxi service for urban mobility: A critical review of recent developments, future challenges, and opportunities. Transp. Res. Part E Logist. Transp. Rev. 2020, 143, 102090. [Google Scholar] [CrossRef]
- Kellermann, R.; Biehle, T.; Fischer, L. Drones for parcel and passenger transportation: A literature review. Transp. Res. Interdiscip. Perspect. 2020, 4, 100088. [Google Scholar] [CrossRef]
- Schweiger, K.; Preis, L. Urban air mobility: Systematic review of scientific publications and regulations for vertiport design and operations. Drones 2022, 6, 179. [Google Scholar] [CrossRef]
- Pons-Prats, J.; Živojinović, T.; Kuljanin, J. On the understanding of the current status of urban air mobility development and its future prospects: Commuting in a flying vehicle as a new paradigm. Transp. Res. Part E Logist. Transp. Rev. 2022, 166, 102868. [Google Scholar] [CrossRef]
- Mavraj, G.; Eltgen, J.; Fraske, T.; Swaid, M.; Berling, J.; Röntgen, O.; Fu, Y.; Schulz, D. A systematic review of ground-based infrastructure for the innovative urban air mobility. Trans. Aerosp. Res. 2022, 2022, 1–17. [Google Scholar] [CrossRef]
- Durach, C.F.; Kembro, J.; Wieland, A. A new paradigm for systematic literature reviews in supply chain management. J. Supply Chain. Manag. 2017, 53, 67–85. [Google Scholar] [CrossRef]
- Doo, J.T.; Pavel, M.D.; Didey, A.; Hange, C.; Diller, N.P.; Tsairides, M.A.; Smith, M.; Bennet, E.; Bromfield, M.; Mooberry, J. NASA Electric Vertical Takeoff and Landing (eVTOL) Aircraft Technology for Public Services—A White Paper; Ames Research Center: Washington, DC, USA, 2021. [Google Scholar]
- Pavel, M.D. Understanding the control characteristics of electric vertical take-off and landing (eVTOL) aircraft for urban air mobility. Aerosp. Sci. Technol. 2022, 125, 107143. [Google Scholar] [CrossRef]
- Vieira, D.R.; Silva, D.; Bravo, A. Electric VTOL aircraft: The future of urban air mobility (background, advantages and challenges). Int. J. Sustain. Aviat. 2019, 5, 101–118. [Google Scholar] [CrossRef]
- Daskilewicz, M.; German, B.; Warren, M.; Garrow, L.A.; Boddupalli, S.S.; Douthat, T.H. Progress in vertiport placement and estimating aircraft range requirements for eVTOL daily commuting. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Aerospace Research Central, Atlanta, GA, USA, 25–29 June 2018; p. 2884. [Google Scholar]
- Littell, J.D. Challenges in vehicle safety and occupant protection for autonomous electric vertical take-off and landing (eVTOL) vehicles. In Proceedings of the 2019 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Indianapolis, IN, USA, 22–24 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–16. [Google Scholar]
- Edwards, T.; Price, G. eVTOL Passenger Acceptance; Technical Report; Ames Reaserch Center: Washington, DC, USA, 2020. [Google Scholar]
- Xiang, S.; Xie, A.; Ye, M.; Yan, X.; Han, X.; Niu, H.; Li, Q.; Huang, H. Autonomous eVTOL: A summary of researches and challenges. Green Energy Intell. Transp. 2023, 3, 100140. [Google Scholar] [CrossRef]
- Mohammad, W.A.; Nazih Diab, Y.; Elomri, A.; Triki, C. Innovative solutions in last mile delivery: Concepts, practices, challenges, and future directions. In Proceedings of the Supply Chain Forum: An International Journal; Taylor & Francis: Abingdon, UK, 2023; Volume 24, pp. 151–169. [Google Scholar]
- Aironline.com. Amazon Makes Second Investment in Beta, Following Alia eVTOL Test Flight. 2023. Available online: https://www.ainonline.com/news-article/2022-06-24/amazon-makes-second-investment-beta-following-alia-evtol-test-flight (accessed on 30 March 2023).
- Russo, R.; Tan, E.C. All-electric Vertical Take-off and Landing Aircraft (eVTOL) for Sustainable Urban Travel. In Sustainability Engineering; CRC Press: Boca Raton, FL, USA, 2023; pp. 265–287. [Google Scholar]
- Pradeep, P.; Wei, P. Heuristic approach for arrival sequencing and scheduling for eVTOL aircraft in on-demand urban air mobility. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–7. [Google Scholar]
- Kleinbekman, I.C.; Mitici, M.A.; Wei, P. eVTOL arrival sequencing and scheduling for on-demand urban air mobility. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–7. [Google Scholar]
- Shihab, S.A.M.; Wei, P.; Ramirez, D.S.J.; Mesa-Arango, R.; Bloebaum, C. By schedule or on demand?—A hybrid operation concept for urban air mobility. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019; p. 3522. [Google Scholar]
- Kleinbekman, I.C.; Mitici, M.; Wei, P. Rolling-horizon electric vertical takeoff and landing arrival scheduling for on-demand urban air mobility. J. Aerosp. Inf. Syst. 2020, 17, 150–159. [Google Scholar] [CrossRef]
- Shao, Q.; Shao, M.; Lu, Y. Terminal area control rules and eVTOL adaptive scheduling model for multi-vertiport system in urban air Mobility. Transp. Res. Part C Emerg. Technol. 2021, 132, 103385. [Google Scholar] [CrossRef]
- Espejo-Díaz, J.A.; Alfonso-Lizarazo, E.; Montoya-Torres, J.R. A heuristic approach for scheduling advanced air mobility aircraft at vertiports. Appl. Math. Model. 2023, 123, 871–890. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, Y. Optimal eVTOL charging and passenger serving scheduling for on-demand urban air mobility. In Proceedings of the AIAA Aviation 2020 Forum, Virtual Event, 15–19 June 2020; p. 3253. [Google Scholar]
- Rigas, E.S.; Kolios, P.; Ellinas, G. Scheduling aerial vehicles in an urban air mobility scheme. In Proceedings of the 2021 IEEE Vehicular Networking Conference (VNC), New York, NY, USA, 10–12 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 76–82. [Google Scholar]
- Chen, J. Integrated routing and charging scheduling for autonomous electric aerial vehicle system. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Guo, Z.; Hao, M.; Liu, J.; Yu, B.; Jiang, Y. Joint routing and charging optimization for eVTOL aircraft recovery. Aerosp. Sci. Technol. 2022, 126, 107595. [Google Scholar] [CrossRef]
- Hildemann, M.; Verstegen, J.A. 3D-flight route optimization for air-taxis in urban areas with Evolutionary Algorithms and GIS. J. Air Transp. Manag. 2023, 107, 102356. [Google Scholar] [CrossRef]
- German, B.; Daskilewicz, M.; Hamilton, T.K.; Warren, M.M. Cargo delivery in by passenger evtol aircraft: A case study in the san francisco bay area. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018; p. 2006. [Google Scholar]
- Ale-Ahmad, H.; Mahmassani, H.S. Capacitated location-allocation-routing problem with time windows for on-demand urban air taxi operation. Transp. Res. Rec. 2021, 2675, 1092–1114. [Google Scholar] [CrossRef]
- Willey, L.C.; Salmon, J.L. A method for urban air mobility network design using hub location and subgraph isomorphism. Transp. Res. Part Emerg. Technol. 2021, 125, 102997. [Google Scholar] [CrossRef]
- Kai, W.; Jacquillat, A.; Vaze, V. Vertiport planning for urban aerial mobility: An adaptive discretization approach. Manuf. Serv. Oper. Manag. 2022, 24, 3215–3235. [Google Scholar] [CrossRef]
- Park, B.T.; Kim, S.H. Vertiport Design Optimization using Integer Programming. In Proceedings of the 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC), Portsmouth, VA, USA, 18–22 September 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Rath, S.; Chow, J.Y. Air taxi skyport location problem with single-allocation choice-constrained elastic demand for airport access. J. Air Transp. Manag. 2022, 105, 102294. [Google Scholar] [CrossRef]
- Macias, J.E.; Khalife, C.; Slim, J.; Angeloudis, P. An integrated vertiport placement model considering vehicle sizing and queuing: A case study in London. J. Air Transp. Manag. 2023, 113, 102486. [Google Scholar] [CrossRef]
- Sinha, A.A.; Rajendran, S. Study on facility location of air taxi skyports using a prescriptive analytics approach. Transp. Res. Interdiscip. Perspect. 2023, 18, 100761. [Google Scholar]
- Ferrão, I.G.; Espes, D.; Dezan, C.; Branco, K.R.L.J.C. Security and safety concerns in air taxis: A systematic literature review. Sensors 2022, 22, 6875. [Google Scholar] [CrossRef]
- Bennaceur, M.; Delmas, R.; Hamadi, Y. Passenger-centric Urban Air Mobility: Fairness trade-offs and operational efficiency. Transp. Res. Part C Emerg. Technol. 2022, 136, 103519. [Google Scholar] [CrossRef]
- Velaz-Acera, N.; Álvarez-García, J.; Borge-Diez, D. Economic and emission reduction benefits of the implementation of eVTOL aircraft with bi-directional flow as storage systems in islands and case study for Canary Islands. Appl. Energy 2023, 331, 120409. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 70–85. [Google Scholar] [CrossRef]
- Shavarani, S.M.; Nejad, M.G.; Rismanchian, F.; Izbirak, G. Application of hierarchical facility location problem for optimization of a drone delivery system: A case study of Amazon prime air in the city of San Francisco. Int. J. Adv. Manuf. Technol. 2018, 95, 3141–3153. [Google Scholar] [CrossRef]
- Torabbeigi, M.; Lim, G.J.; Kim, S.J. Drone delivery scheduling optimization considering payload-induced battery consumption rates. J. Intell. Robot. Syst. 2020, 97, 471–487. [Google Scholar] [CrossRef]
- Yan, S.; Sun, C.S.; Chen, Y.H. Optimal routing and scheduling of unmanned aerial vehicles for delivery services. Transp. Lett. 2023, 1–12. [Google Scholar] [CrossRef]
- Walker, L. Drone Delivery for Amazon and Google Slowed by Headwinds. Newsweek. Available online: https://www.newsweek.com/will-wind-be-end-commercial-drone-delivery-amazon-and-google-275999 (accessed on 7 October 2014).
- Cheng, C.; Adulyasak, Y.; Rousseau, L.M.; Sim, M. Robust drone delivery with weather information. History 2020, 1, 1–37. [Google Scholar] [CrossRef]
- Vural, D.; Dell, R.F.; Kose, E. Locating unmanned aircraft systems for multiple missions under different weather conditions. Oper. Res. 2021, 21, 725–744. [Google Scholar] [CrossRef]
- Gaba, F.T. Solutions to the Generalized UAV Delivery Routing Problem for Last-Mile Delivery with Societal Constraints. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2022. [Google Scholar]
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- de Freitas, J.C.; Penna, P.H.V. A randomized variable neighborhood descent heuristic to solve the flying sidekick traveling salesman problem. Electron. Notes Discret. Math. 2018, 66, 95–102. [Google Scholar] [CrossRef]
- Jeong, H.Y.; Song, B.D.; Lee, S. Truck-drone hybrid delivery routing: Payload-energy dependency and No-Fly zones. Int. J. Prod. Econ. 2019, 214, 220–233. [Google Scholar] [CrossRef]
- de Freitas, J.C.; Penna, P.H.V. A variable neighborhood search for flying sidekick traveling salesman problem. Int. Trans. Oper. Res. 2020, 27, 267–290. [Google Scholar] [CrossRef]
- Gonzalez-R, P.L.; Canca, D.; Andrade-Pineda, J.L.; Calle, M.; Leon-Blanco, J.M. Truck-drone team logistics: A heuristic approach to multi-drop route planning. Transp. Res. Part Emerg. Technol. 2020, 114, 657–680. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Drone-assisted deliveries: New formulations for the flying sidekick traveling salesman problem. Optim. Lett. 2021, 15, 1617–1648. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Algorithms based on branch and bound for the flying sidekick traveling salesman problem. Omega 2021, 104, 102493. [Google Scholar] [CrossRef]
- Boccia, M.; Masone, A.; Sforza, A.; Sterle, C. A column-and-row generation approach for the flying sidekick travelling salesman problem. Transp. Res. Part C Emerg. Technol. 2021, 124, 102913. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Exact models for the flying sidekick traveling salesman problem. Int. Trans. Oper. Res. 2022, 29, 1360–1393. [Google Scholar] [CrossRef]
- Mara, S.T.W.; Rifai, A.P.; Sopha, B.M. An adaptive large neighborhood search heuristic for the flying sidekick traveling salesman problem with multiple drops. Expert Syst. Appl. 2022, 205, 117647. [Google Scholar] [CrossRef]
- Liu, Z.; Li, X.; Khojandi, A. The flying sidekick traveling salesman problem with stochastic travel time: A reinforcement learning approach. Transp. Res. Part E Logist. Transp. Rev. 2022, 164, 102816. [Google Scholar] [CrossRef]
- Boccia, M.; Mancuso, A.; Masone, A.; Sterle, C. A new MILP formulation for the flying sidekick traveling salesman problem. Networks 2023, 82, 254–276. [Google Scholar] [CrossRef]
- Yanpirat, N.; Silva, D.F.; Smith, A.E. Sustainable last mile parcel delivery and return service using drones. Eng. Appl. Artif. Intell. 2023, 124, 106631. [Google Scholar] [CrossRef]
- Agatz, N.; Bouman, P.; Schmidt, M. Optimization approaches for the traveling salesman problem with drone. Transp. Sci. 2018, 52, 965–981. [Google Scholar] [CrossRef]
- Bouman, P.; Agatz, N.; Schmidt, M. Dynamic programming approaches for the traveling salesman problem with drone. Networks 2018, 72, 528–542. [Google Scholar] [CrossRef]
- Poikonen, S.; Golden, B.; Wasil, E.A. A branch-and-bound approach to the traveling salesman problem with a drone. INFORMS J. Comput. 2019, 31, 335–346. [Google Scholar] [CrossRef]
- Roberti, R.; Ruthmair, M. Exact methods for the traveling salesman problem with drone. Transp. Sci. 2021, 55, 315–335. [Google Scholar] [CrossRef]
- Ha, Q.M.; Deville, Y.; Pham, Q.D.; Hà, M.H. On the min-cost traveling salesman problem with drone. Transp. Res. Part C Emerg. Technol. 2018, 86, 597–621. [Google Scholar] [CrossRef]
- Yurek, E.E.; Ozmutlu, H.C. Traveling salesman problem with drone under recharging policy. Comput. Commun. 2021, 179, 35–49. [Google Scholar] [CrossRef]
- Kim, S.; Moon, I. Traveling salesman problem with a drone station. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 42–52. [Google Scholar] [CrossRef]
- Murray, C.C.; Raj, R. The multiple flying sidekicks traveling salesman problem: Parcel delivery with multiple drones. Transp. Res. Part C Emerg. Technol. 2020, 110, 368–398. [Google Scholar] [CrossRef]
- Raj, R.; Murray, C. The multiple flying sidekicks traveling salesman problem with variable drone speeds. Transp. Res. Part C Emerg. Technol. 2020, 120, 102813. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Modeling the flying sidekick traveling salesman problem with multiple drones. Networks 2021, 78, 303–327. [Google Scholar] [CrossRef]
- Cavani, S.; Iori, M.; Roberti, R. Exact methods for the traveling salesman problem with multiple drones. Transp. Res. Part C Emerg. Technol. 2021, 130, 103280. [Google Scholar] [CrossRef]
- Chang, Y.S.; Lee, H.J. Optimal delivery routing with wider drone-delivery areas along a shorter truck-route. Expert Syst. Appl. 2018, 104, 307–317. [Google Scholar] [CrossRef]
- Luo, Z.; Poon, M.; Zhang, Z.; Liu, Z.; Lim, A. The multi-visit traveling salesman problem with multi-drones. Transp. Res. Part C Emerg. Technol. 2021, 128, 103172. [Google Scholar] [CrossRef]
- Salama, M.R.; Srinivas, S. Collaborative truck multi-drone routing and scheduling problem: Package delivery with flexible launch and recovery sites. Transp. Res. Part E Logist. Transp. Rev. 2022, 164, 102788. [Google Scholar] [CrossRef]
- Sacramento, D.; Pisinger, D.; Ropke, S. An adaptive large neighborhood search metaheuristic for the vehicle routing problem with drones. Transp. Res. Part C Emerg. Technol. 2019, 102, 289–315. [Google Scholar] [CrossRef]
- Yin, Y.; Li, D.; Wang, D.; Ignatius, J.; Cheng, T.; Wang, S. A branch-and-price-and-cut algorithm for the truck-based drone delivery routing problem with time windows. Eur. J. Oper. Res. 2023, 309, 1125–1144. [Google Scholar] [CrossRef]
- Boysen, N.; Briskorn, D.; Fedtke, S.; Schwerdfeger, S. Drone delivery from trucks: Drone scheduling for given truck routes. Networks 2018, 72, 506–527. [Google Scholar] [CrossRef]
- Wang, C.; Lan, H.; Saldanha-da Gama, F.; Chen, Y. On optimizing a multi-mode last-mile parcel delivery system with vans, truck and drone. Electronics 2021, 10, 2510. [Google Scholar] [CrossRef]
- Kitjacharoenchai, P.; Ventresca, M.; Moshref-Javadi, M.; Lee, S.; Tanchoco, J.M.; Brunese, P.A. Multiple traveling salesman problem with drones: Mathematical model and heuristic approach. Comput. Ind. Eng. 2019, 129, 14–30. [Google Scholar] [CrossRef]
- Bektas, T. The multiple traveling salesman problem: An overview of formulations and solution procedures. Omega 2006, 34, 209–219. [Google Scholar] [CrossRef]
- Kloster, K.; Moeini, M.; Vigo, D.; Wendt, O. The multiple traveling salesman problem in presence of drone-and robot-supported packet stations. Eur. J. Oper. Res. 2023, 305, 630–643. [Google Scholar] [CrossRef]
- Wang, X.; Poikonen, S.; Golden, B. The vehicle routing problem with drones: Several worst-case results. Optim. Lett. 2017, 11, 679–697. [Google Scholar] [CrossRef]
- Poikonen, S.; Wang, X.; Golden, B. The vehicle routing problem with drones: Extended models and connections. Networks 2017, 70, 34–43. [Google Scholar] [CrossRef]
- Wang, Z.; Sheu, J.B. Vehicle routing problem with drones. Transp. Res. Part B Methodol. 2019, 122, 350–364. [Google Scholar] [CrossRef]
- Schermer, D.; Moeini, M.; Wendt, O. A matheuristic for the vehicle routing problem with drones and its variants. Transp. Res. Part C Emerg. Technol. 2019, 106, 166–204. [Google Scholar] [CrossRef]
- Schermer, D.; Moeini, M.; Wendt, O. A hybrid VNS/Tabu search algorithm for solving the vehicle routing problem with drones and en route operations. Comput. Oper. Res. 2019, 109, 134–158. [Google Scholar] [CrossRef]
- Poikonen, S.; Golden, B. Multi-visit drone routing problem. Comput. Oper. Res. 2020, 113, 104802. [Google Scholar] [CrossRef]
- Han, Y.; Li, J.; Liu, Z.; Liu, C.; Tian, J. Metaheuristic algorithm for solving the multi-objective vehicle routing problem with time window and drones. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420920031. [Google Scholar] [CrossRef]
- Tamke, F.; Buscher, U. A branch-and-cut algorithm for the vehicle routing problem with drones. Transp. Res. Part B Methodol. 2021, 144, 174–203. [Google Scholar] [CrossRef]
- Lei, D.; Cui, Z.; Li, M. A dynamical artificial bee colony for vehicle routing problem with drones. Eng. Appl. Artif. Intell. 2022, 107, 104510. [Google Scholar] [CrossRef]
- Euchi, J.; Sadok, A. Hybrid genetic-sweep algorithm to solve the vehicle routing problem with drones. Phys. Commun. 2021, 44, 101236. [Google Scholar] [CrossRef]
- Ahn, N.; Kim, S. Optimal and heuristic algorithms for the multi-objective vehicle routing problem with drones for military surveillance operations. J. Ind. Manag. Optim. 2022, 18, 1651–1663. [Google Scholar] [CrossRef]
- Kuo, R.; Lu, S.H.; Lai, P.Y.; Mara, S.T.W. Vehicle routing problem with drones considering time windows. Expert Syst. Appl. 2022, 191, 116264. [Google Scholar] [CrossRef]
- Masmoudi, M.A.; Mancini, S.; Baldacci, R.; Kuo, Y.H. Vehicle routing problems with drones equipped with multi-package payload compartments. Transp. Res. Part E Logist. Transp. Rev. 2022, 164, 102757. [Google Scholar] [CrossRef]
- Gu, R.; Poon, M.; Luo, Z.; Liu, Y.; Liu, Z. A hierarchical solution evaluation method and a hybrid algorithm for the vehicle routing problem with drones and multiple visits. Transp. Res. Part C Emerg. Technol. 2022, 141, 103733. [Google Scholar] [CrossRef]
- Huang, S.H.; Huang, Y.H.; Blazquez, C.A.; Chen, C.Y. Solving the vehicle routing problem with drone for delivery services using an ant colony optimization algorithm. Adv. Eng. Inform. 2022, 51, 101536. [Google Scholar] [CrossRef]
- Lu, Y.; Yang, C.; Yang, J. A multi-objective humanitarian pickup and delivery vehicle routing problem with drones. Ann. Oper. Res. 2022, 319, 291–353. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, S.; Xu, W.; Wang, W. A novel multi-objective optimization model for the vehicle routing problem with drone delivery and dynamic flight endurance. Comput. Ind. Eng. 2022, 173, 108679. [Google Scholar] [CrossRef]
- Kuo, R.; Edbert, E.; Zulvia, F.E.; Lu, S.H. Applying NSGA-II to vehicle routing problem with drones considering makespan and carbon emission. Expert Syst. Appl. 2023, 221, 119777. [Google Scholar] [CrossRef]
- Xia, Y.; Zeng, W.; Zhang, C.; Yang, H. A branch-and-price-and-cut algorithm for the vehicle routing problem with load-dependent drones. Transp. Res. Part B Methodol. 2023, 171, 80–110. [Google Scholar] [CrossRef]
- Tamke, F.; Buscher, U. The vehicle routing problem with drones and drone speed selection. Comput. Oper. Res. 2023, 152, 106112. [Google Scholar] [CrossRef]
- Yin, Y.; Yang, Y.; Yu, Y.; Wang, D.; Cheng, T. Robust vehicle routing with drones under uncertain demands and truck travel times in humanitarian logistics. Transp. Res. Part B Methodol. 2023, 174, 102781. [Google Scholar] [CrossRef]
- Yang, Y.; Yan, C.; Cao, Y.; Roberti, R. Planning robust drone-truck delivery routes under road traffic uncertainty. Eur. J. Oper. Res. 2023, 309, 1145–1160. [Google Scholar] [CrossRef]
- Jiang, J.; Dai, Y.; Yang, F.; Ma, Z. A multi-visit flexible-docking vehicle routing problem with drones for simultaneous pickup and delivery services. Eur. J. Oper. Res. 2024, 312, 125–137. [Google Scholar] [CrossRef]
- Di Puglia Pugliese, L.; Guerriero, F. Last-mile deliveries by using drones and classical vehicles. In Proceedings of the Optimization and Decision Science: Methodologies and Applications: ODS, Sorrento, Italy, 4–7 September 2017; Springer: Berlin/Heidelberg, Germany, 2017; Volume 47, pp. 557–565. [Google Scholar]
- Li, H.; Zhao, J.; Zhan, Z. Truck and Unmanned Vehicle Routing Problem with Time Windows: A Satellite Synchronization Perspective. J. Adv. Transp. 2022, 2022, 6599089. [Google Scholar] [CrossRef]
- Gómez-Lagos, J.; Candia-Véjar, A.; Encina, F. A new truck-drone routing problem for parcel delivery services aided by parking lots. IEEE Access 2021, 9, 11091–11108. [Google Scholar] [CrossRef]
- Das, D.N.; Sewani, R.; Wang, J.; Tiwari, M.K. Synchronized truck and drone routing in package delivery logistics. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5772–5782. [Google Scholar] [CrossRef]
- Dayarian, I.; Savelsbergh, M.; Clarke, J.P. Same-day delivery with drone resupply. Transp. Sci. 2020, 54, 229–249. [Google Scholar] [CrossRef]
- Li, H.; Wang, F. Branch-price-and-cut for the truck–drone routing problem with time windows. Nav. Res. Logist. 2023, 70, 184–204. [Google Scholar] [CrossRef]
- Kang, M.; Lee, C. An exact algorithm for heterogeneous drone-truck routing problem. Transp. Sci. 2021, 55, 1088–1112. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Z.; Hu, X.; Xue, G.; Guan, X. Truck–drone hybrid routing problem with time-dependent road travel time. Transp. Res. Part C Emerg. Technol. 2022, 144, 103901. [Google Scholar] [CrossRef]
- Chen, X.; Ulmer, M.W.; Thomas, B.W. Deep Q-learning for same-day delivery with vehicles and drones. Eur. J. Oper. Res. 2022, 298, 939–952. [Google Scholar] [CrossRef]
- Ham, A.M. Integrated scheduling of m-truck, m-drone, and m-depot constrained by time-window, drop-pickup, and m-visit using constraint programming. Transp. Res. Part C Emerg. Technol. 2018, 91, 1–14. [Google Scholar] [CrossRef]
- Luo, Z.; Liu, Z.; Shi, J. A two-echelon cooperated routing problem for a ground vehicle and its carried unmanned aerial vehicle. Sensors 2017, 17, 1144. [Google Scholar] [CrossRef] [PubMed]
- Karak, A.; Abdelghany, K. The hybrid vehicle-drone routing problem for pick-up and delivery services. Transp. Res. Part C Emerg. Technol. 2019, 102, 427–449. [Google Scholar] [CrossRef]
- Kitjacharoenchai, P.; Min, B.C.; Lee, S. Two echelon vehicle routing problem with drones in last mile delivery. Int. J. Prod. Econ. 2020, 225, 107598. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Z.; Shi, J.; Wu, G.; Pedrycz, W. Two-echelon routing problem for parcel delivery by cooperated truck and drone. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 7450–7465. [Google Scholar] [CrossRef]
- Vu, L.; Vu, D.M.; Hà, M.H.; Nguyen, V.P. The two-echelon routing problem with truck and drones. Int. Trans. Oper. Res. 2022, 29, 2968–2994. [Google Scholar] [CrossRef]
- Perboli, G.; Tadei, R.; Vigo, D. The two-echelon capacitated vehicle routing problem: Models and math-based heuristics. Transp. Sci. 2011, 45, 364–380. [Google Scholar] [CrossRef]
- Rave, A.; Fontaine, P.; Kuhn, H. Drone location and vehicle fleet planning with trucks and aerial drones. Eur. J. Oper. Res. 2023, 308, 113–130. [Google Scholar] [CrossRef]
- Li, H.; Chen, J.; Wang, F.; Bai, M. Ground-vehicle and unmanned-aerial-vehicle routing problems from two-echelon scheme perspective: A review. Eur. J. Oper. Res. 2021, 294, 1078–1095. [Google Scholar] [CrossRef]
- Hong, I.; Kuby, M.; Murray, A.T. A range-restricted recharging station coverage model for drone delivery service planning. Transp. Res. Part C Emerg. Technol. 2018, 90, 198–212. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V.; Huang, C. Reliable path planning for drone delivery using a stochastic time-dependent public transportation network. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4941–4950. [Google Scholar] [CrossRef]
- Pinto, R.; Lagorio, A. Point-to-point drone-based delivery network design with intermediate charging stations. Transp. Res. Part C Emerg. Technol. 2022, 135, 103506. [Google Scholar] [CrossRef]
- ElSayed, M.; Foda, A.; Mohamed, M. Autonomous drone charging station planning through solar energy harnessing for zero-emission operations. Sustain. Cities Soc. 2022, 86, 104122. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. JRCS: Joint routing and charging strategy for logistics drones. IEEE Internet Things J. 2022, 9, 21751–21764. [Google Scholar] [CrossRef]
- Cokyasar, T. Delivery drone route planning over a battery swapping network. Procedia Comput. Sci. 2021, 184, 10–16. [Google Scholar] [CrossRef]
- Cokyasar, T.; Dong, W.; Jin, M.; Verbas, İ.Ö. Designing a drone delivery network with automated battery swapping machines. Comput. Oper. Res. 2021, 129, 105177. [Google Scholar] [CrossRef]
- Huang, C.; Ming, Z.; Huang, H. Drone Stations-Aided Beyond-Battery-Lifetime Flight Planning for Parcel Delivery. IEEE Trans. Autom. Sci. Eng. 2022. [Google Scholar] [CrossRef]
- Chauhan, D.; Unnikrishnan, A.; Figliozzi, M. Maximum coverage capacitated facility location problem with range constrained drones. Transp. Res. Part C Emerg. Technol. 2019, 99, 1–18. [Google Scholar] [CrossRef]
- Shavarani, S.M.; Mosallaeipour, S.; Golabi, M.; İzbirak, G. A congested capacitated multi-level fuzzy facility location problem: An efficient drone delivery system. Comput. Oper. Res. 2019, 108, 57–68. [Google Scholar] [CrossRef]
- Shavarani, S.M.; Golabi, M.; Izbirak, G. A capacitated biobjective location problem with uniformly distributed demands in the UAV-supported delivery operation. Int. Trans. Oper. Res. 2021, 28, 3220–3243. [Google Scholar] [CrossRef]
- Tu, Y.J.; Piramuthu, S. Security and privacy risks in drone-based last mile delivery. Eur. J. Inf. Syst. 2023, 1–14. [Google Scholar] [CrossRef]
- Li, Y.; Yang, W.; Huang, B. Impact of UAV delivery on sustainability and costs under traffic restrictions. Math. Probl. Eng. 2020, 2020, 9437605. [Google Scholar] [CrossRef]
- Chiang, W.C.; Li, Y.; Shang, J.; Urban, T.L. Impact of drone delivery on sustainability and cost: Realizing the UAV potential through vehicle routing optimization. Appl. Energy 2019, 242, 1164–1175. [Google Scholar] [CrossRef]
- Koiwanit, J. Analysis of environmental impacts of drone delivery on an online shopping system. Adv. Clim. Change Res. 2018, 9, 201–207. [Google Scholar] [CrossRef]
- Teimoury, E.; Rashid, R. The sustainable hybrid truck-drone delivery model with stochastic customer existence. Res. Transp. Econ. 2023, 100, 101325. [Google Scholar] [CrossRef]
- Meng, Z.; Zhou, Y.; Li, E.Y.; Peng, X.; Qiu, R. Environmental and economic impacts of drone-assisted truck delivery under the carbon market price. J. Clean. Prod. 2023, 401, 136758. [Google Scholar] [CrossRef]
- Coutinho, W.P.; Battarra, M.; Fliege, J. The unmanned aerial vehicle routing and trajectory optimisation problem, a taxonomic review. Comput. Ind. Eng. 2018, 120, 116–128. [Google Scholar] [CrossRef]
- Khoufi, I.; Laouiti, A.; Adjih, C. A survey of recent extended variants of the traveling salesman and vehicle routing problems for unmanned aerial vehicles. Drones 2019, 3, 66. [Google Scholar] [CrossRef]
- Thibbotuwawa, A.; Bocewicz, G.; Nielsen, P.; Banaszak, Z. Unmanned aerial vehicle routing problems: A literature review. Appl. Sci. 2020, 10, 4504. [Google Scholar] [CrossRef]
- Rojas Viloria, D.; Solano-Charris, E.L.; Muñoz-Villamizar, A.; Montoya-Torres, J.R. Unmanned aerial vehicles/drones in vehicle routing problems: A literature review. Int. Trans. Oper. Res. 2021, 28, 1626–1657. [Google Scholar] [CrossRef]
- Poikonen, S.; Campbell, J.F. Future directions in drone routing research. Networks 2021, 77, 116–126. [Google Scholar] [CrossRef]
- Moshref-Javadi, M.; Hemmati, A.; Winkenbach, M. A comparative analysis of synchronized truck-and-drone delivery models. Comput. Ind. Eng. 2021, 162, 107648. [Google Scholar] [CrossRef]
- Li, Y.; Liu, M.; Jiang, D. Application of unmanned aerial vehicles in logistics: A literature review. Sustainability 2022, 14, 14473. [Google Scholar] [CrossRef]
- Liang, Y.J.; Luo, Z.X. A survey of truck–drone routing problem: Literature review and research prospects. J. Oper. Res. Soc. China 2022, 10, 343–377. [Google Scholar] [CrossRef]
- Madani, B.; Ndiaye, M. Hybrid truck-drone delivery systems: A systematic literature review. IEEE Access 2022, 10, 92854–92878. [Google Scholar] [CrossRef]
- Eskandaripour, H.; Boldsaikhan, E. Last-mile drone delivery: Past, present, and future. Drones 2023, 7, 77. [Google Scholar] [CrossRef]
- Zhang, R.; Dou, L.; Xin, B.; Chen, C.; Deng, F.; Chen, J. A review on the truck and drone cooperative delivery problem. Unmanned Syst. 2023, 1–25. [Google Scholar] [CrossRef]
- Figliozzi, M.A. Carbon emissions reductions in last mile and grocery deliveries utilizing air and ground autonomous vehicles. Transp. Res. Part D Transp. Environ. 2020, 85, 102443. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Deployment of charging stations for drone delivery assisted by public transportation vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 23, 15043–15054. [Google Scholar] [CrossRef]
- Choudhury, S.; Solovey, K.; Kochenderfer, M.J.; Pavone, M. Efficient large-scale multi-drone delivery using transit networks. J. Artif. Intell. Res. 2021, 70, 757–788. [Google Scholar] [CrossRef]
- Moadab, A.; Farajzadeh, F.; Fatahi Valilai, O. Drone routing problem model for last-mile delivery using the public transportation capacity as moving charging stations. Sci. Rep. 2022, 12, 6361. [Google Scholar] [CrossRef] [PubMed]
- Elsaid, F.; Sanchez, E.T.; Li, Y.; Khamis, A. Optimal Placement of Drone Delivery Stations and Demand Allocation using Bio-inspired Algorithms. In Proceedings of the 2023 IEEE International Conference on Smart Mobility (SM), Thuwal, Saudi Arabia, 19–21 March 2023; pp. 39–44. [Google Scholar]
- Vukićević, M.; Ratli, M.; Rivenq, A.; Zrikem, M. Covering delivery problem with electric vehicle and parcel lockers: Variable neighborhood search approach. Comput. Oper. Res. 2023, 157, 106263. [Google Scholar] [CrossRef]
- Boschetti, M.A.; Novellani, S. Last-mile delivery with drone and lockers. Networks 2024, 83, 213–235. [Google Scholar] [CrossRef]
- Aftabi, N.; Moradi, N.; Mahroo, F. Feed-Forward Neural Networks as a Mixed-Integer Program. arXiv 2024, arXiv:2402.06697. [Google Scholar]
- Aftabi, N.; Moradi, N.; Mahroo, F.; Kianfar, F. A Multi-Method Framework for Information Security Investment. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4730222 (accessed on 14 June 2024).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Year | Focus Area | Transportation Approach | Key Technologies | OR Perspective | ||||
|---|---|---|---|---|---|---|---|---|---|
| Passenger | Parcel | VTOL | eVTOL | UAV | EV | ||||
| [9] | 2019 | eVTOL challenges and technologies | ✓ | ✓ | ✓ | No | |||
| [15] | 2020 | UAM challenges and potentials | ✓ | ✓ | No | ||||
| [16] | 2020 | eVTOL challenges from operations management perspective | ✓ | ✓ | No | ||||
| [17] | 2020 | Drone delivery systems | ✓ | ✓ | ✓ | No | |||
| [13] | 2021 | Comparison of UAM with EVs and UAVs | ✓ | ✓ | ✓ | ✓ | No | ||
| [10] | 2021 | Operational aspects of air mobility | ✓ | ✓ | ✓ | ✓ | No | ||
| [11] | 2021 | UAM challenges, potential, and market | ✓ | ✓ | ✓ | ✓ | No | ||
| [18] | 2022 | Vertiport location and design | ✓ | ✓ | ✓ | No | |||
| [19] | 2022 | UAM challenges and prospects | ✓ | ✓ | ✓ | No | |||
| [20] | 2022 | Ground-based infrastructure for UAM | ✓ | ✓ | ✓ | No | |||
| [12] | 2023 | Vertiport location and capacity | ✓ | ✓ | ✓ | No | |||
| [14] | 2023 | UAM challenges, mechanisms, and applications | ✓ | ✓ | ✓ | ✓ | No | ||
| Present work | 2023 | UAM challenges in last-mile transportation | ✓ | ✓ | ✓ | ✓ | Yes | ||
| Ref. | Year | Problem | Methodology |
|---|---|---|---|
| [63] | 2018 | FSTSP | Variable neighborhood descent (VND) |
| [64] | 2019 | FSTSP with payload energy dependency and no-fly zones | MILP/heuristic |
| [65] | 2020 | FSTSP | Variable neighborhood search (VNS) |
| [66] | 2020 | FSTSP | SA |
| [67] | 2021 | FSTSP | Three-indexed and two-indexed formulations |
| [68] | 2021 | FSTSP | Branch-and-bound |
| [69] | 2021 | FSTSP | Column-and-row generation |
| [70] | 2022 | FSTSP | Exact models |
| [71] | 2022 | FSTSP with multiple drops | ALNS |
| [72] | 2022 | FSTSP with stochastic travel time | Reinforcement learning approach |
| [73] | 2023 | FSTSP | MILP |
| [74] | 2023 | “FSTSP with deliveries and returns with multiple payloads (FSTSP-DR-MP)” | MILP and VNS |
| Ref. | Year | Problem | Methodology |
|---|---|---|---|
| [98] | 2019 | VRP-D | Branch-and-price |
| [99] | 2019 | VRP-D | MILP/heuristic |
| [100] | 2019 | VRP-D | VNS/Tabu search (TS) |
| [101] | 2020 | “Multivisit VRP-D (MVDRP)” | Heuristics |
| [102] | 2020 | VRP-D | Improved ABC |
| [103] | 2021 | VRP-D | Branch-and-cut |
| [104] | 2021 | VRP-D | Artificial bee colony (ABC) |
| [105] | 2021 | VRP-D | Hybrid genetic-sweep algorithm |
| [106] | 2022 | VRP-D | Heuristics |
| [107] | 2022 | VRP-D with time windows (VRPTWD) | MILP and VNS |
| [108] | 2022 | “VRP-D with multipackage payload compartments (VRP-D-MC)” | Multistart SA |
| [109] | 2022 | VRP-D with multiple visits | ILS/VNS |
| [110] | 2022 | VRP-D | Ant colony optimization (ACO) |
| [111] | 2022 | Multiobjective humanitarian pickup and delivery VRP-D | Hybrid evolutionary algorithm/ACO |
| [112] | 2022 | Multiobjective VRP-D with dynamic flight endurance | NSGA II |
| [113] | 2023 | Multiobjective VRP-D | NSGA II |
| [114] | 2023 | Load-dependent VRP-D | Branch-and-price-and-cut |
| [115] | 2023 | VRP-D with drone speed selection | MILP and valid inequalities |
| [116] | 2023 | VRP-D under uncertain demands and truck travel times | Robust optimization |
| [117] | 2023 | VRP-D under road traffic uncertainty | Robust optimization |
| [118] | 2024 | Multivisit flexible-docking VRP-D | MILP and ALNS |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moradi, N.; Wang, C.; Mafakheri, F. Urban Air Mobility for Last-Mile Transportation: A Review. Vehicles 2024, 6, 1383-1414. https://doi.org/10.3390/vehicles6030066
Moradi N, Wang C, Mafakheri F. Urban Air Mobility for Last-Mile Transportation: A Review. Vehicles. 2024; 6(3):1383-1414. https://doi.org/10.3390/vehicles6030066
Chicago/Turabian StyleMoradi, Nima, Chun Wang, and Fereshteh Mafakheri. 2024. "Urban Air Mobility for Last-Mile Transportation: A Review" Vehicles 6, no. 3: 1383-1414. https://doi.org/10.3390/vehicles6030066
APA StyleMoradi, N., Wang, C., & Mafakheri, F. (2024). Urban Air Mobility for Last-Mile Transportation: A Review. Vehicles, 6(3), 1383-1414. https://doi.org/10.3390/vehicles6030066