3.1.2. Entities, State Variables, and Scales
The model abstracts the glove game into computerized form. The glove game is a standard game from cooperative game theory. The players are trying to sell pairs of gloves, and they can form coalitions with other players to form more glove pairs by pooling their gloves. Each player has a fixed endowment of gloves to create pairs. The coalitions that form are the output of interest from the game. The players are the agents in the model; the players are, collectively, the human player and the computerized agents.
Agents: players
Environment: A abstract social setting where players are able to communicate with each other about forming coalitions.
Variables: The player variables are coalition membership, left-hand gloves, right-hand gloves.
Coalition Membership: This variable indicates the current coalition that a player is a member. Each coalition is assigned an index number; even a coalition of only one player, known as a singleton coalition, is assigned an index number.
Left-hand Gloves: This variable represents a player’s endowment of left-hand gloves, which are fixed throughout the game.
Right-hand Gloves: This variable represents a player’s endowment of right-hand gloves, which are fixed throughout the game.
Gloves are used to work out the value of a coalition. All other variables are calculated from these variables.
A round of the game represents an arbitrary time scale.
3.1.4. Design Concepts
The simulation model is a computerized abstraction of the glove game; the glove game is a cooperative game [
16] that has been used in human-subject experimentation [
13]. In the game, all computerized agents are utility maximizers, which is a common assumption in game theory where utility is called payoff. As such, the computerized agents’ decisions are driven by a desire to increase their payoff. The game has complete information.
There are two emergent phenomena that are hoped to be observed from the simulation run. The first is that human players play like the computerized agents; that is, their decisions are consistent with what the computerized agents would do in a similar situation (micro-level), which was shown to be consistent in Collins et al. [
18]. The second emergent behavior is that the final coalition, of which a human is a member (macro-level outcome), is a core coalition. The focus of this paper is on the second emergent phenomenon.
The way that the players adapt their situation is to join coalitions. They can only be a member of one coalition at a time and can only join a coalition that is suggested to them. Both the human player and the ABMSCORE algorithm can suggest coalitions. It is important to note that a new suggested coalition will only form if all its potential members agree to form the coalition. This means that if a new coalition includes a player, that player has veto power over its formation. The computerized agents will only join a new coalition if the payoff they would receive is higher than their current payoff, i.e., the payoff they would receive from their current coalition.
Since players can leave a coalition, other members of their old coalition will find themselves in a new coalition (a coalition with one player less); as a result of this, a player’s payoff might go down because their coalition has fewer glove pairs due to another player’s departure. Players are unable to stop another player from leaving a coalition; they only control their own membership destiny. Note that in Hart and Kurz [
16] version of the glove game, it was assumed the coalition collapsed after a player left, resulting in all the remaining players being in their singleton coalitions; this is an assumption that is not followed in our model.
All the computerized agents’ objective is to be a member of a coalition that maximizes their payoff. In the glove game, the payoff of a given agent ‘a’ in coalition ‘S’ is in Equation (1).
The human player is also instructed that the computerized agents trying to maximize their utility; however, whether they choose to try and do that or not; is completely their choice. It is possible that human players follow other objectives, e.g., complete the experiment as quickly as possible.
This model does not include learning.
This model does not include prediction modeling.
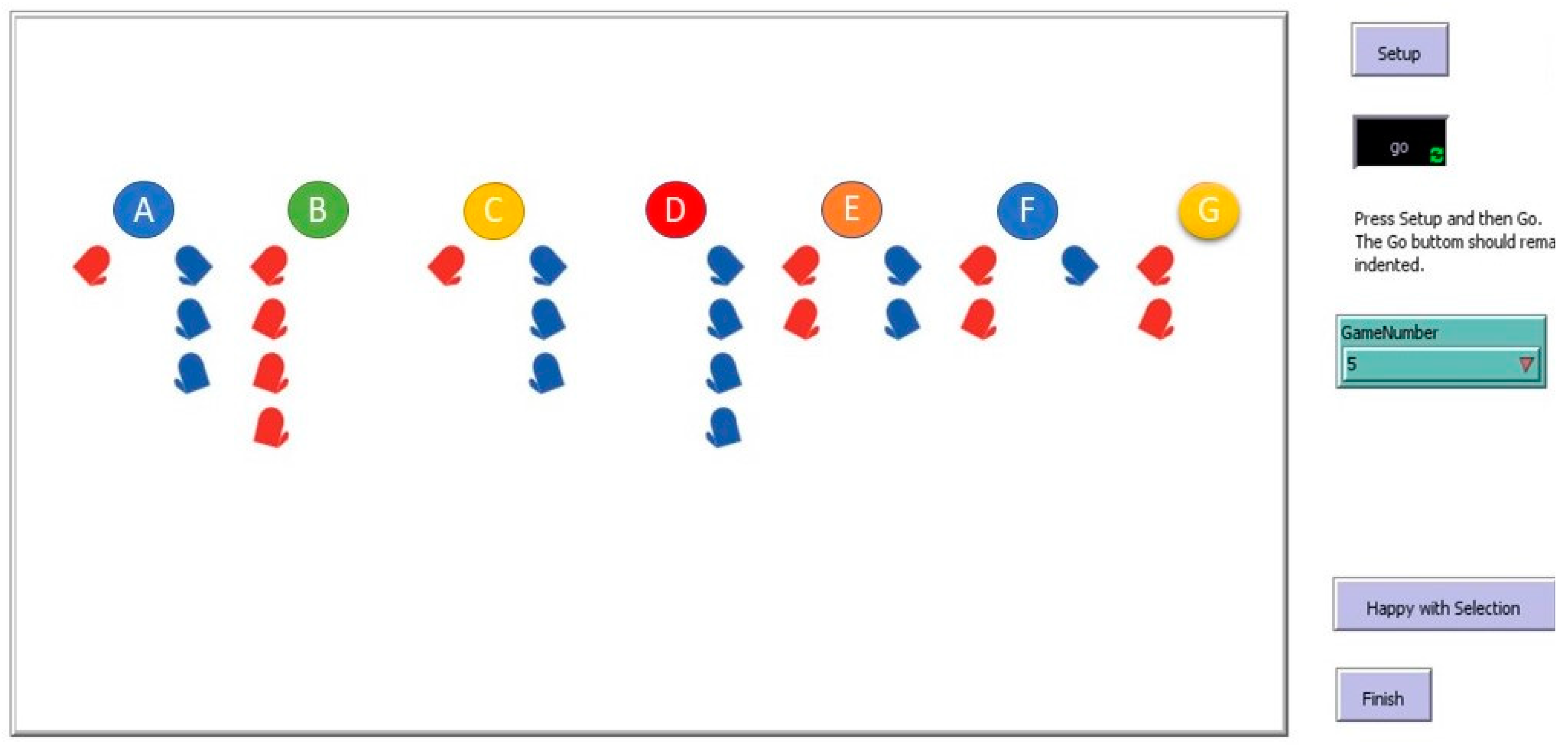
The computerized agents do not sense each other in spatial terms. Through a graphical user interface (GUI), the human player has complete knowledge of the game situation, i.e., the current coalitions and the glove endowments of each player. The graphical representation that the human player sees is shown in
Figure 3.
In the GUI, each player is represented by a static circle and alphabetic figure like A–G. Each player’s glove endowment is shown immediately below the player’s circle; for example,
Figure 3 shows player F has two left-hand gloves (red) and a right-hand glove (blue), whereas player B only has four left-hand gloves. The current coalitions are represented in the GUI as colors of the players; for example,
Figure 3 shows that players A and F are in a coalition, so are players C and G; all other players are in a singleton coalition. The human player is always player A.
There is no direct interaction between players; however, their decisions can affect each other’s payoff. When a player decides to leave or joins a coalition, then there might be a change in the coalition’s value; this change in value affects the payoff of its members. The value of a coalition is the number of glove pairs that can be made from all its members’ gloves, whereas its member’s payoff is its value divided by the coalition size.
To understand this indirect interaction, consider players C and G in the example game shown in
Figure 3. While these two players are in a coalition together, they can create three pairs of gloves and get a payoff of 1.5 each. However, if player C leaves the coalition, player G would get a payoff of zero. Thus, player C’s actions indirectly affect player G’s utility.
Strategic coalition formation requires multiple decision-makers to interact. By simulating the other decision-makers and only using a single human in the simulation, the effects of complicated interpersonal dynamics can be avoided, thus increasing the internal validity of our experiment [
60]. However, removing the inter-personal relationships does limit the external validity of our experiment.
The only stochastic elements of the model are the coalition suggestions made by the ABMSCORE algorithm. Six different suggested coalitions are made by the algorithm during each step of a model run. The six suggested coalitions each represent a different type of coalition formation [
10]. For example, one approach could be to suggest the combining of two randomly chosen coalitions to create a new larger coalition. The six different coalition approaches are briefly discussed in the sub-model section.
The inclusion of an actual human’s decisions within the model creates uncertainty; however, this behavior is not necessarily stochastic for a given individual. The human player’s decision-making type is stochastic with regard to its distribution, i.e., different people will use different processes to make their decisions.
Coalitions are a form of collective. The model focus is on the formation of coalitions in the glove game. In the model, the coalitions are not represented as agents but as a numerical variable of each player; if two players share the same number, they are in the same coalition.
There are a variety of observations that are recorded after the human player makes a decision in a given trial. These include the current coalition structure, the suggested coalition, and the human player’s current payoff. It was also recorded whether or not the final coalition structure was a core partition and whether or not the human player’s final coalition is a core coalition; if the human player’s coalition was in a core partition, it is called a core coalition. Finally, all human player’s decisions at the individual level (micro-level) are compared to what the computerized agents would do, and a Boolean value recorded to see whether their behavior is consistent with the computerized agent. This consistency has been discussed in [
18].
3.1.7. Sub-Models
There are two sub-models worthy of discussion. The first is the Graphical User Interface (GUI) used by the human player. The second is the ABMSCORE algorithm.
The purpose of the GUI is to provide the human player with an overview of the game situation as well as suggest coalitions or respond to suggested coalitions. The GUI allows the human player to see the endowment of other players and the current game situation, as discussed in the sensing section above.
Figure 3 shows a screenshot of the GUI.
The GUI allows the human player to suggest coalitions on their turn; this is achieved by clicking on other players’ circles they wish to form a coalition. These circles turn into squares if selected. Once the human player is happy with their selection, they simply press “happy with the selection”. If they do not wish to make a selection, then simply selecting no player and pressing “happy with the selection” will move the game onto the computerized agents’ turns. Once the human player is happy with the coalition structure presented, they simply press “Finish” to end the game.
There is one human player in the model, and all other players are controlled by the ABMSCORE algorithm. The purpose of the algorithm is to simulate the computerized agents’ behavior of joining and suggesting coalitions. The version of the algorithm used in the model was the advanced version developed by Vernon-Bido and Collins [
10]. There are three parts used within the algorithm: coalition suggestion, coalition evaluation, and coalition updating. These three parts control changes to the coalition structure, which is the main output of the model. The coalition involves six types of suggestions: joint coalition, exit coalition, create a pair coalition, defect coalition, split coalition, and return to an individual coalition. All three parts of the algorithm are explained in detail in Vernon-Bido and Collins [
10].









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}