




Artificial Intelligence in Electric Vehicle Battery Disassembly: A Systematic Review




Abstract
1. Introduction
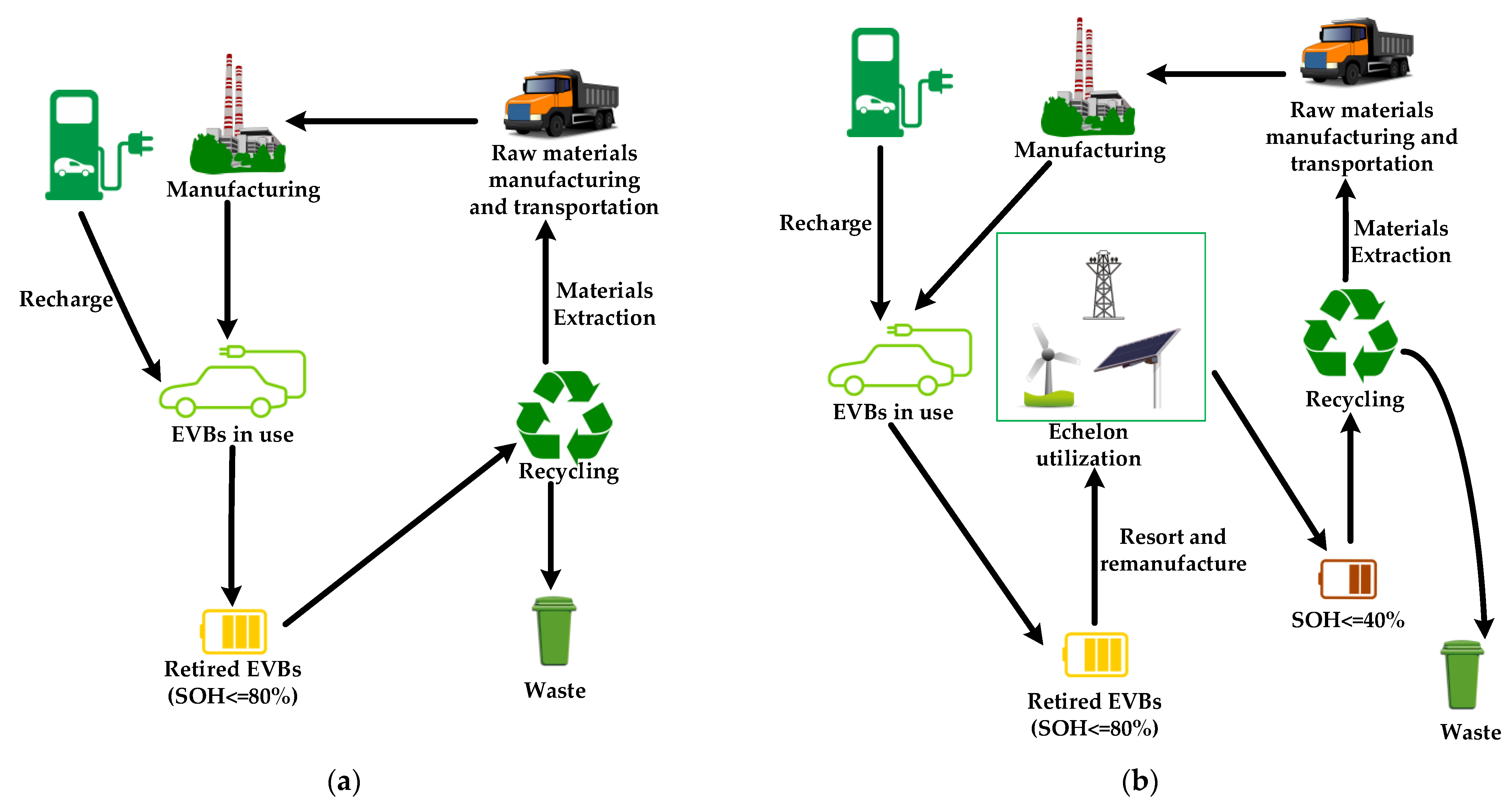
- This paper summarizes the current status of electric vehicle batteries’ recycling and current issues in the recycling process.
- The applications of AI in the recycling of retired electric vehicle batteries, including SOH estimation, disassembly sequence planning, and disassembly operations, are reviewed.
- Possible future development directions for EVB recycling are discussed.
2. Overview of Electric Vehicle Battery Disassembly Problems and Methodology
2.1. Electric Vehicle Battery Structures
2.2. Challenges in the EVB Disassembly Process
- Low recycling efficiency: In industry, dismantling EVBs is mainly based on destructive dismantling. This method breaks the battery down into smaller parts for further processing through mechanical damage or other means. While this method allows for the rapid separation of battery components, it often damages many valuable components within the battery such that these components cannot be recycled.
- Various types and structures: Different manufacturers use different types of batteries. For example, Tesla uses cylindrical batteries [16], while BYD uses blade batteries [29]. Battery capacity and appearance vary somewhat, even between models from the same vendor. Such a large variety of types and configurations makes automated disassembly difficult.
- Safety risks: End-of-life car batteries contain heavy metals and toxic and hazardous organics, which may release harmful gases during treatment, posing a safety risk to operators.
- High disassembly complexity: The disassembly process has much higher complexity than the assembly process. Many retired EV batteries have rusted screws or even deformed battery structures within them, requiring recognition algorithms to verify the situations; thus, they cannot be disassembled using just the reverse process of the EVB assembly process. Sometimes, the disassembly space is restricted, making it inconvenient for the human and/or robot arm to operate.
- Unpublished data: Most manufacturers do not disclose their vehicles’ operating data, which can result in, for example, too little training data for the state-of-health estimation process.
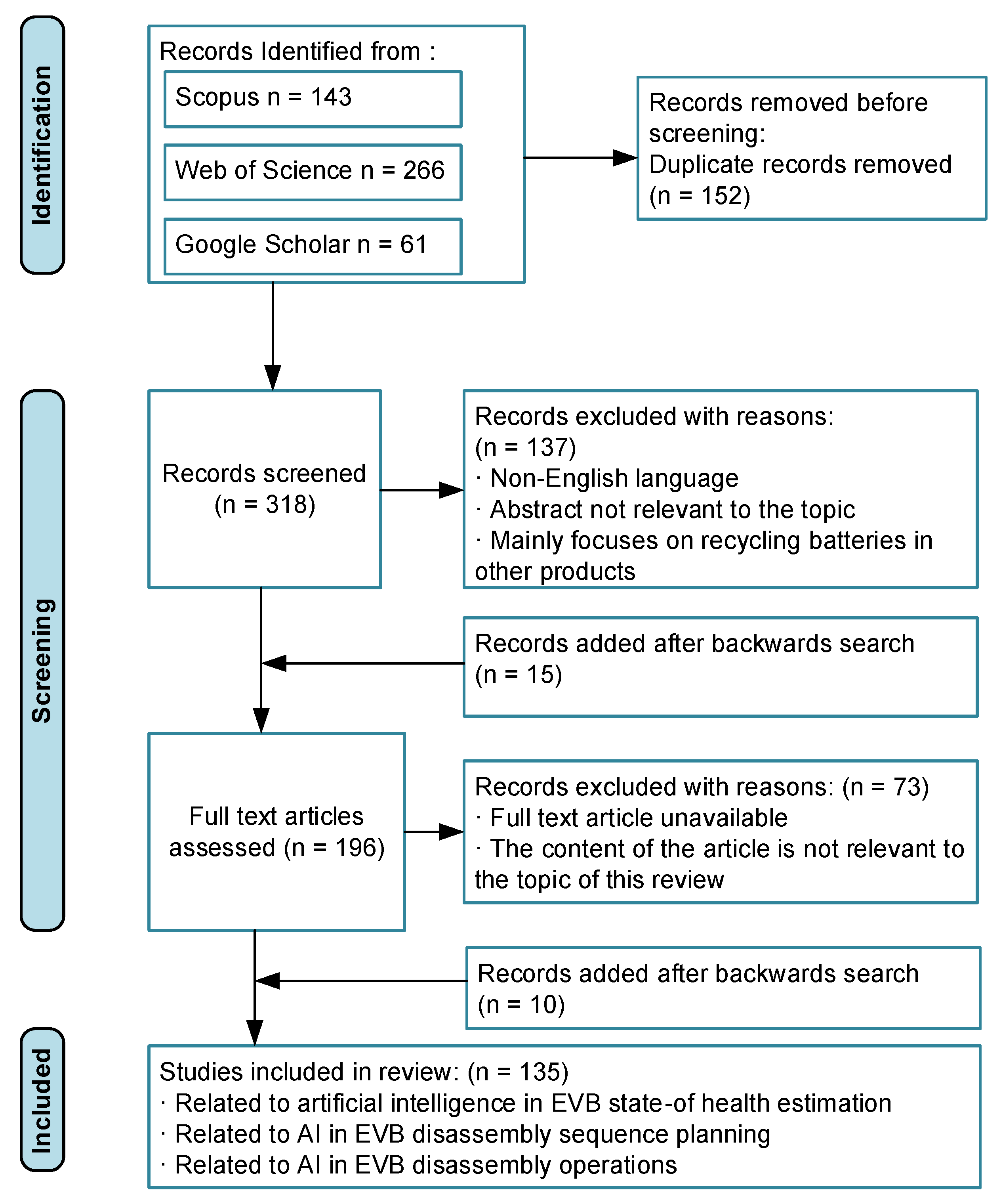
2.3. Methodology
3. AI-Based Electric Vehicle Battery State-of-Health Estimation
3.1. AI Methods in SOH Estimation
3.2. Characterization Parameters in SOH Estimation
4. Disassembly Sequence Planning (DSP) for EV Batteries
4.1. Disassembly Process Modeling
4.2. AI Algorithms in DSP
5. AI-Driven Disassembly Operation for EV Batteries
5.1. Object and Defect Identification
5.2. Intelligent Tool Selection and Disassembly Line Balancing
5.3. Intelligent Separation Optimization
6. Discussion and Future Prospects
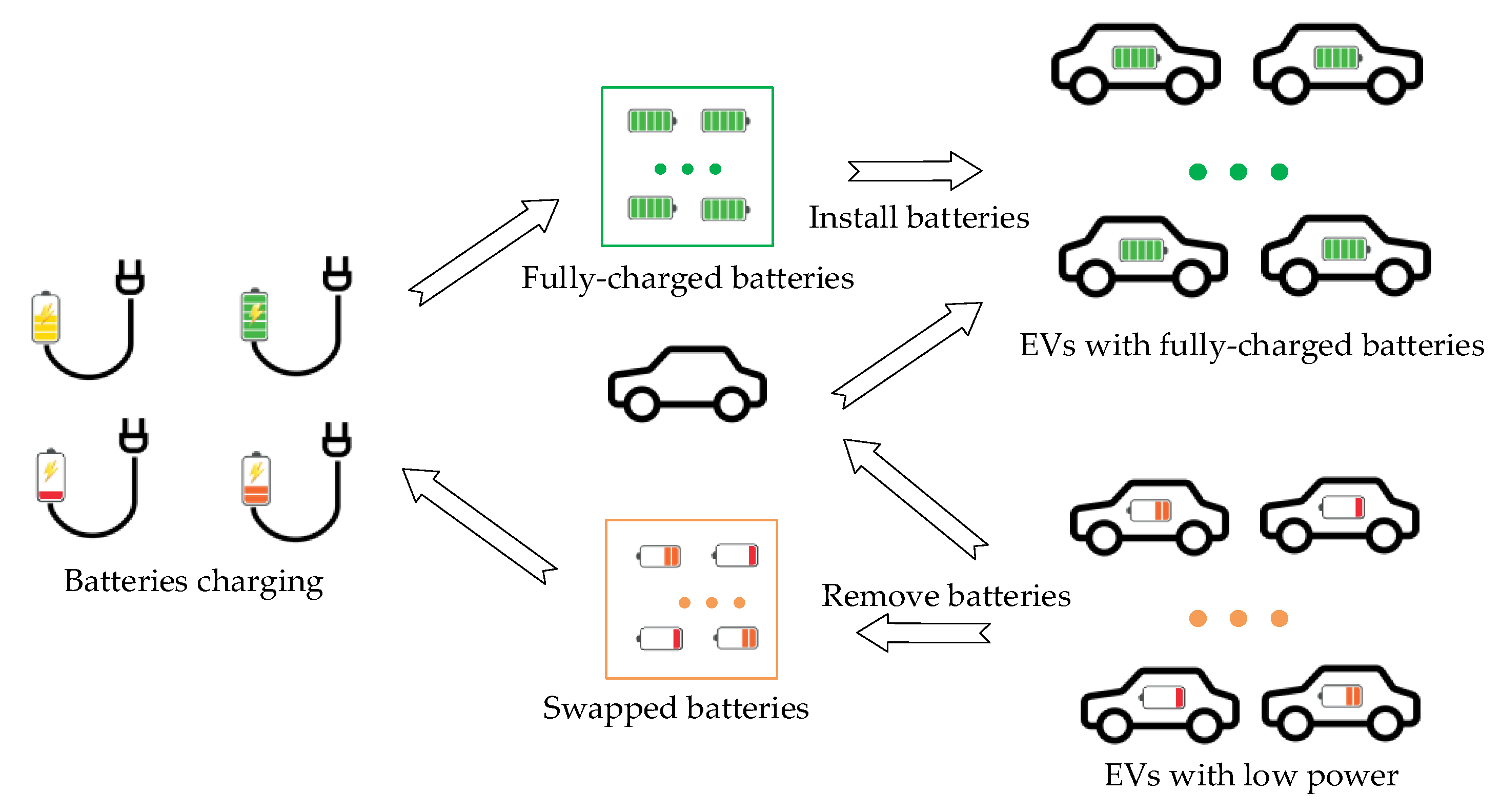
6.1. Electric Vehicle Battery Swapping
- Only batteries of the same type and size can be replaced. However, the batteries of different car manufacturers worldwide, and even models of the same manufacturer, are not the same. This makes it impossible for battery swapping stations that serve cars from other manufacturers to be interoperable.
- Battery manufacturing costs account for a large part of the cost of electric vehicle production. Establishing a battery swapping station means manufacturing many additional batteries, which will incur relatively high expenses.
- To popularize battery-swapping, battery-swapping stations need to be widely established, which requires more investment than battery fast-charging stations. It also requires manufacturers to be able to integrate the supply chain. Due to great difficulties in this area, Tesla shifted its research and development direction from battery swapping to fast charging [124].
- The number of battery swaps also has peaks and troughs over time. For example, people generally drive during holidays, and the frequency of battery swaps for electric vehicles is currently higher. This causes problems with the layout of a battery swapping station and the reserve of replaceable batteries. The economic benefits will be low if there are too many idle batteries. If there are too few replaceable batteries, the user must wait to charge their replacement battery.
- Consumers’ psychological factors must also be considered. Battery replacement means that a car component is constantly being replaced, and some consumers may doubt this operating mode.
6.2. Intelligent Design for Disassembly (DFD)
6.3. Digital Twin and Human–Robot Collaboration Applications
6.4. Charging Optimization
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Declaration of Generative AI and AI-Assisted Technologies in the Writing Process
Abbreviations
| ACO | Ant Colony Optimization Algorithm |
| AI | Artificial intelligence |
| AR | Augmented reality |
| BMS | Battery management system |
| BSSs | Battery swapping stations |
| CNN | Convolutional neural network |
| DABC | Discrete Artificial Bee Colony Algorithm |
| DFD | Design for disassembly |
| DNN | Deep neural network |
| DSP | Disassembly sequence planning |
| DT | Digital twin |
| EIS | Electrochemical impedance spectroscopy |
| EOL | End of life |
| EVB | Electric vehicle battery |
| EVs | Electric vehicles |
| GA | Genetic algorithm |
| GRNN | Generalized regression neural network |
| HABC | Hybrid Artificial Bee Colony Algorithm |
| HGA | Hybrid genetic algorithm |
| LIBs | Lithium-ion batteries |
| LSTM | Long short-term memory |
| MFO | Moth–Flame Optimization |
| NSGA-II | Non-Dominated Sorting Genetic Algorithm II |
| PNt | Petri Net |
| RES | Rotating edge similarity algorithm |
| RF | Random forest |
| RUL | Remaining useful life |
| SOC | State of charge |
| SOH | State of health |
| SVM | Support vector machine |
| TL | Transfer learning |
References
- Executive Summary—Global EV Outlook 2024—Analysis. Available online: https://www.iea.org/reports/global-ev-outlook-2024/executive-summary (accessed on 15 May 2024).
- Free Icons and Stickers. Available online: https://www.flaticon.com/ (accessed on 8 August 2024).
- Vecteezy. Available online: https://www.vecteezy.com/free-vector (accessed on 8 August 2024).
- Pixabay. Available online: https://pixabay.com/ (accessed on 8 August 2024).
- Reinhart, L.; Vrucak, D.; Woeste, R.; Lucas, H.; Rombach, E.; Friedrich, B.; Letmathe, P. Pyrometallurgical Recycling of Different Lithium-Ion Battery Cell Systems: Economic and Technical Analysis. J. Clean. Prod. 2023, 416, 137834. [Google Scholar] [CrossRef]
- Wu, J.; Xiao, L.; Shen, L.; Ran, J.-J.; Zhong, H.; Zhu, Y.-R.; Chen, H. Recent Advancements in Hydrometallurgical Recycling Technologies of Spent Lithium-Ion Battery Cathode Materials. Rare Met. 2024, 43, 879–899. [Google Scholar] [CrossRef]
- Lai, X.; Huang, Y.; Deng, C.; Gu, H.; Han, X.; Zheng, Y.; Ouyang, M. Sorting, Regrouping, and Echelon Utilization of the Large-Scale Retired Lithium Batteries: A Critical Review. Renew. Sustain. Energy Rev. 2021, 146, 111162. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, F.; Wang, Y.; Guo, J.; Yang, Z.; Jiang, F. Revolutionizing the Afterlife of EV Batteries: A Comprehensive Guide to Echelon Utilization Technologies. ChemElectroChem 2024, 11, e202300666. [Google Scholar] [CrossRef]
- Explosion Hits CATL Battery Precursors Plant in China—Latest Market News. Available online: https://www.argusmedia.com/en/news-and-insights/latest-market-news/2175179-explosion-hits-catl-battery-precursors-plant-in-china (accessed on 15 May 2024).
- Zhang, C.; Lu, Y. Study on Artificial Intelligence: The State of the Art and Future Prospects. J. Ind. Inf. Integr. 2021, 23, 100224. [Google Scholar] [CrossRef]
- Silver, D.; Schrittwieser, J.; Simonyan, K.; Antonoglou, I.; Huang, A.; Guez, A.; Hubert, T.; Baker, L.; Lai, M.; Bolton, A.; et al. Mastering the Game of Go without Human Knowledge. Nature 2017, 550, 354–359. [Google Scholar] [CrossRef]
- Harper, G.; Sommerville, R.; Kendrick, E.; Driscoll, L.; Slater, P.; Stolkin, R.; Walton, A.; Christensen, P.; Heidrich, O.; Lambert, S.; et al. Recycling Lithium-Ion Batteries from Electric Vehicles. Nature 2019, 575, 75–86. [Google Scholar] [CrossRef]
- Neumann, J.; Petranikova, M.; Meeus, M.; Gamarra, J.D.; Younesi, R.; Winter, M.; Nowak, S. Recycling of Lithium-Ion Batteries—Current State of the Art, Circular Economy, and Next Generation Recycling. Adv. Energy Mater. 2022, 12, 2102917. [Google Scholar] [CrossRef]
- Meng, K.; Xu, G.; Peng, X.; Youcef-Toumi, K.; Li, J. Intelligent Disassembly of Electric-Vehicle Batteries: A Forward-Looking Overview. Resour. Conserv. Recycl. 2022, 182, 106207. [Google Scholar] [CrossRef]
- Ji, H.; Wang, J.; Ma, J.; Cheng, H.-M.; Zhou, G. Fundamentals, Status and Challenges of Direct Recycling Technologies for Lithium Ion Batteries. Chem. Soc. Rev. 2023, 52, 8194–8244. [Google Scholar] [CrossRef]
- Yu, W.; Guo, Y.; Xu, S.; Yang, Y.; Zhao, Y.; Zhang, J. Comprehensive Recycling of Lithium-Ion Batteries: Fundamentals, Pretreatment, and Perspectives. Energy Storage Mater. 2023, 54, 172–220. [Google Scholar] [CrossRef]
- Gu, X.; Bai, H.; Cui, X.; Zhu, J.; Zhuang, W.; Li, Z.; Hu, X.; Song, Z. Challenges and Opportunities for Second-Life Batteries: Key Technologies and Economy. Renew. Sustain. Energy Rev. 2024, 192, 114191. [Google Scholar] [CrossRef]
- Li, W.; Peng, Y.; Zhu, Y.; Pham, D.T.; Nee, A.Y.C.; Ong, S.K. End-of-Life Electric Vehicle Battery Disassembly Enabled by Intelligent and Human-Robot Collaboration Technologies: A Review. Rob. Comput. Integr. Manuf. 2024, 89, 102758. [Google Scholar] [CrossRef]
- Hertel, D.; Bräunig, G.; Thürer, M. Towards a Green Electromobility Transition: A Systematic Review of the State of the Art on Electric Vehicle Battery Systems Disassembly. J. Manuf. Syst. 2024, 74, 387–396. [Google Scholar] [CrossRef]
- Vangapally, N.; Penki, T.R.; Elias, Y.; Muduli, S.; Maddukuri, S.; Luski, S.; Aurbach, D.; Martha, S.K. Lead-Acid Batteries and Lead–Carbon Hybrid Systems: A Review. J. Power Sources 2023, 579, 233312. [Google Scholar] [CrossRef]
- Zhou, D.; Guo, X.; Zhang, Q.; Shi, Y.; Zhang, H.; Yu, C.; Pang, H. Nickel-Based Materials for Advanced Rechargeable Batteries. Adv. Funct. Mater. 2022, 32, 2107928. [Google Scholar] [CrossRef]
- Usiskin, R.; Lu, Y.; Popovic, J.; Law, M.; Balaya, P.; Hu, Y.-S.; Maier, J. Fundamentals, Status and Promise of Sodium-Based Batteries. Nat. Rev. Mater. 2021, 6, 1020–1035. [Google Scholar] [CrossRef]
- Kim, T.; Song, W.; Son, D.Y.; Ono, L.K.; Qi, Y. Lithium-Ion Batteries: Outlook on Present, Future, and Hybridized Technologies. J. Mater. Chem. A 2019, 7, 2942–2964. [Google Scholar] [CrossRef]
- Alfaro-Algaba, M.; Ramirez, F.J. Techno-Economic and Environmental Disassembly Planning of Lithium-Ion Electric Vehicle Battery Packs for Remanufacturing. Resour. Conserv. Recycl. 2020, 154, 104461. [Google Scholar] [CrossRef]
- Heilweil, R. The Race for a Better Battery Starts Now. Available online: https://www.vox.com/recode/23027110/solid-state-lithium-battery-tesla-gm-ford (accessed on 17 May 2024).
- A Bit About Batteries|Tesla Portugal. Available online: https://www.tesla.com/pt_pt/blog/bit-about-batteries (accessed on 8 July 2024).
- TDI Engine—Volkswagen Australia. Available online: https://www.volkswagen.com.au/en/hybrid-and-electric/technology/id-technology/battery-technology.html (accessed on 8 July 2024).
- BYD Blade Battery: The Turning Point Innovation in Electric Vehicle Batteries. 2024. Available online: https://www.bydbdautogroup.com/en/byd-blade-battery-en/ (accessed on 13 July 2024).
- BYD’s Revolutionary Blade Battery: All You Need to Know. Available online: https://www.byd.com/eu/blog/BYDs-revolutionary-Blade-Battery-all-you-need-to-know (accessed on 15 May 2024).
- PRISMA Statement. Available online: https://www.prisma-statement.org (accessed on 8 August 2024).
- What Are SOC and SOH of a Battery, How to Measure Them? Available online: https://www.biologic.net/topics/battery-states-state-of-charge-soc-state-of-health-soh/ (accessed on 17 May 2024).
- Couture, J.; Lin, X. Image- and Health Indicator-Based Transfer Learning Hybridization for Battery RUL Prediction. Eng. Appl. Artif. Intell. 2022, 114, 105120. [Google Scholar] [CrossRef]
- Pastor-Fernández, C.; Yu, T.F.; Widanage, W.D.; Marco, J. Critical Review of Non-Invasive Diagnosis Techniques for Quantification of Degradation Modes in Lithium-Ion Batteries. Renew. Sustain. Energy Rev. 2019, 109, 138–159. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, C.; Jiang, J.; Zhang, W.; Zhang, L.; Wang, Y. Review on State-of-Health of Lithium-Ion Batteries: Characterizations, Estimations and Applications. J. Clean. Prod. 2021, 314, 128015. [Google Scholar] [CrossRef]
- Manoharan, A.; Begam, K.M.; Aparow, V.R.; Sooriamoorthy, D. Artificial Neural Networks, Gradient Boosting and Support Vector Machines for Electric Vehicle Battery State Estimation: A Review. J. Energy Storage 2022, 55, 105384. [Google Scholar] [CrossRef]
- Li, X.; Yu, D.; Søren Byg, V.; Daniel Ioan, S. The Development of Machine Learning-Based Remaining Useful Life Prediction for Lithium-Ion Batteries. J. Energy Chem. 2023, 82, 103–121. [Google Scholar] [CrossRef]
- Liu, K.; Wei, Z.; Zhang, C.; Shang, Y.; Teodorescu, R.; Han, Q.-L. Towards Long Lifetime Battery: AI-Based Manufacturing and Management. IEEE/CAA J. Autom. Sin. 2022, 9, 1139–1165. [Google Scholar] [CrossRef]
- Ruan, H.; Wei, Z.; Shang, W.; Wang, X.; He, H. Artificial Intelligence-Based Health Diagnostic of Lithium-Ion Battery Leveraging Transient Stage of Constant Current and Constant Voltage Charging. Appl. Energy 2023, 336, 120751. [Google Scholar] [CrossRef]
- Li, S.; He, H.; Zhao, P.; Cheng, S. Health-Conscious Vehicle Battery State Estimation Based on Deep Transfer Learning. Appl. Energy 2022, 316, 119120. [Google Scholar] [CrossRef]
- Li, P.; Zhang, Z.; Grosu, R.; Deng, Z.; Hou, J.; Rong, Y.; Wu, R. An End-to-End Neural Network Framework for State-of-Health Estimation and Remaining Useful Life Prediction of Electric Vehicle Lithium Batteries. Renew. Sustain. Energy Rev. 2022, 156, 111843. [Google Scholar] [CrossRef]
- Alfarizi, M.G.; Tajiani, B.; Vatn, J.; Yin, S. Optimized Random Forest Model for Remaining Useful Life Prediction of Experimental Bearings. IEEE Trans. Ind. Inform. 2023, 19, 7771–7779. [Google Scholar] [CrossRef]
- Li, Y.; Zou, C.; Berecibar, M.; Nanini-Maury, E.; Chan, J.C.-W.; van den Bossche, P.; Van Mierlo, J.; Omar, N. Random Forest Regression for Online Capacity Estimation of Lithium-Ion Batteries. Appl. Energy 2018, 232, 197–210. [Google Scholar] [CrossRef]
- Yang, N.; Song, Z.; Hofmann, H.; Sun, J. Robust State of Health Estimation of Lithium-Ion Batteries Using Convolutional Neural Network and Random Forest. J. Energy Storage 2022, 48, 103857. [Google Scholar] [CrossRef]
- Mawonou, K.S.R.; Eddahech, A.; Dumur, D.; Beauvois, D.; Godoy, E. State-of-Health Estimators Coupled to a Random Forest Approach for Lithium-Ion Battery Aging Factor Ranking. J. Power Sources 2021, 484, 229154. [Google Scholar] [CrossRef]
- Shu, X.; Zhang, Y.; Chen, Z.; Liu, Y. A Flexible State-of-Health Prediction Scheme for Lithium-Ion Battery Packs With Long Short-Term Memory Network and Transfer Learning. IEEE Trans. Transp. Electrif. 2021, 7, 2238–2248. [Google Scholar] [CrossRef]
- Wang, F.-K.; Amogne, Z.E.; Chou, J.-H.; Tseng, C. Online Remaining Useful Life Prediction of Lithium-Ion Batteries Using Bidirectional Long Short-Term Memory with Attention Mechanism. Energy 2022, 254, 124344. [Google Scholar] [CrossRef]
- Cheng, G.; Wang, X.; He, Y. Remaining Useful Life and State of Health Prediction for Lithium Batteries Based on Empirical Mode Decomposition and a Long and Short Memory Neural Network. Energy 2021, 232, 121022. [Google Scholar] [CrossRef]
- Cho, S.; Han, D.; Kim, J.; Kim, J. State of Health Estimation Embedded with Hardware Accelerator Based on Long Short-Term Memory Combined with Bayesian Optimization Considering Extracted Health Indicator in Charging Conditions. J. Energy Storage 2024, 90, 111897. [Google Scholar] [CrossRef]
- Li, P.; Zhang, Z.; Xiong, Q.; Ding, B.; Hou, J.; Luo, D.; Rong, Y.; Li, S. State-of-Health Estimation and Remaining Useful Life Prediction for the Lithium-Ion Battery Based on a Variant Long Short Term Memory Neural Network. J. Power Sources 2020, 459, 228069. [Google Scholar] [CrossRef]
- Ma, G.; Xu, S.; Yang, T.; Du, Z.; Zhu, L.; Ding, H.; Yuan, Y. A Transfer Learning-Based Method for Personalized State of Health Estimation of Lithium-Ion Batteries. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 759–769. [Google Scholar] [CrossRef]
- Deng, Z.; Lin, X.; Cai, J.; Hu, X. Battery Health Estimation with Degradation Pattern Recognition and Transfer Learning. J. Power Sources 2022, 525, 231027. [Google Scholar] [CrossRef]
- Ma, Y.; Shan, C.; Gao, J.; Chen, H. Multiple Health Indicators Fusion-Based Health Prognostic for Lithium-Ion Battery Using Transfer Learning and Hybrid Deep Learning Method. Reliab. Eng. Syst. Saf. 2023, 229, 108818. [Google Scholar] [CrossRef]
- Che, Y.; Deng, Z.; Lin, X.; Hu, L.; Hu, X. Predictive Battery Health Management With Transfer Learning and Online Model Correction. IEEE Trans. Veh. Technol. 2021, 70, 1269–1277. [Google Scholar] [CrossRef]
- Ma, G.; Xu, S.; Jiang, B.; Cheng, C.; Yang, X.; Shen, Y.; Yang, T.; Huang, Y.; Ding, H.; Yuan, Y. Real-Time Personalized Health Status Prediction of Lithium-Ion Batteries Using Deep Transfer Learning. Energy Environ. Sci. 2022, 15, 4083–4094. [Google Scholar] [CrossRef]
- Ye, Z.; Yu, J. State-of-Health Estimation for Lithium-Ion Batteries Using Domain Adversarial Transfer Learning. IEEE Trans. Power Electron. 2022, 37, 3528–3543. [Google Scholar] [CrossRef]
- Sahoo, S.; Hariharan, K.S.; Agarwal, S.; Swernath, S.B.; Bharti, R.; Han, S.; Lee, S. Transfer Learning Based Generalized Framework for State of Health Estimation of Li-Ion Cells. Sci. Rep. 2022, 12, 13173. [Google Scholar] [CrossRef] [PubMed]
- Zhou, K.Q.; Qin, Y.; Yuen, C. Transfer-Learning-Based State-of-Health Estimation for Lithium-Ion Battery with Cycle Synchronization. IEEE/ASME Trans. Mechatron. 2023, 28, 692–702. [Google Scholar] [CrossRef]
- Li, Q.; Li, D.; Zhao, K.; Wang, L.; Wang, K. State of Health Estimation of Lithium-Ion Battery Based on Improved Ant Lion Optimization and Support Vector Regression. J. Energy Storage 2022, 50, 104215. [Google Scholar] [CrossRef]
- Yang, D.; Wang, Y.; Pan, R.; Chen, R.; Chen, Z. State-of-Health Estimation for the Lithium-Ion Battery Based on Support Vector Regression. Appl. Energy 2018, 227, 273–283. [Google Scholar] [CrossRef]
- Klass, V.; Behm, M.; Lindbergh, G. A Support Vector Machine-Based State-of-Health Estimation Method for Lithium-Ion Batteries under Electric Vehicle Operation. J. Power Sources 2014, 270, 262–272. [Google Scholar] [CrossRef]
- Feng, X.; Weng, C.; He, X.; Han, X.; Lu, L.; Ren, D.; Ouyang, M. Online State-of-Health Estimation for Li-Ion Battery Using Partial Charging Segment Based on Support Vector Machine. IEEE Trans. Veh. Technol. 2019, 68, 8583–8592. [Google Scholar] [CrossRef]
- Gu, X.; See, K.W.; Li, P.; Shan, K.; Wang, Y.; Zhao, L.; Lim, K.C.; Zhang, N. A Novel State-of-Health Estimation for the Lithium-Ion Battery Using a Convolutional Neural Network and Transformer Model. Energy 2023, 262, 125501. [Google Scholar] [CrossRef]
- Xu, H.; Wu, L.; Xiong, S.; Li, W.; Garg, A.; Gao, L. An Improved CNN-LSTM Model-Based State-of-Health Estimation Approach for Lithium-Ion Batteries. Energy 2023, 276, 127585. [Google Scholar] [CrossRef]
- Ouyang, T.; Su, Y.; Wang, C.; Jin, S. Combined Meta-Learning with CNN-LSTM Algorithms for State-of-Health Estimation of Lithium-Ion Battery. IEEE Trans. Power Electron. 2024, 39, 10106–10117. [Google Scholar] [CrossRef]
- Buchanan, S.; Crawford, C. Probabilistic Lithium-Ion Battery State-of-Health Prediction Using Convolutional Neural Networks and Gaussian Process Regression. J. Energy Storage 2024, 76, 109799. [Google Scholar] [CrossRef]
- Zhang, S.; Zhu, H.; Wu, J.; Chen, Z. Voltage Relaxation-Based State-of-Health Estimation of Lithium-Ion Batteries Using Convolutional Neural Networks and Transfer Learning. J. Energy Storage 2023, 73, 108579. [Google Scholar] [CrossRef]
- Liu, B.; Xu, J.; Xia, W. State-of-Health Estimation for Lithium-Ion Battery Based on an Attention-Based CNN-GRU Model with Reconstructed Feature Series. Int. J. Energy Res. 2023, 2023, 8569161. [Google Scholar] [CrossRef]
- He, J.; Wei, Z.; Bian, X.; Yan, F. State-of-Health Estimation of Lithium-Ion Batteries Using Incremental Capacity Analysis Based on Voltage–Capacity Model. IEEE Trans. Transp. Electrific. 2020, 6, 417–426. [Google Scholar] [CrossRef]
- Galeotti, M.; Cinà, L.; Giammanco, C.; Cordiner, S.; Di Carlo, A. Performance Analysis and SOH (State of Health) Evaluation of Lithium Polymer Batteries through Electrochemical Impedance Spectroscopy. Energy 2015, 89, 678–686. [Google Scholar] [CrossRef]
- Chen, Z.; Zhao, H.; Zhang, Y.; Shen, S.; Shen, J.; Liu, Y. State of Health Estimation for Lithium-Ion Batteries Based on Temperature Prediction and Gated Recurrent Unit Neural Network. J. Power Sources 2022, 521, 230892. [Google Scholar] [CrossRef]
- She, C.; Zhang, L.; Wang, Z.; Sun, F.; Liu, P.; Song, C. Battery State-of-Health Estimation Based on Incremental Capacity Analysis Method: Synthesizing From Cell-Level Test to Real-World Application. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 214–223. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, J.; Lund, P.D.; Zhang, Y. Estimation and Prediction of State of Health of Electric Vehicle Batteries Using Discrete Incremental Capacity Analysis Based on Real Driving Data. Energy 2021, 225, 120160. [Google Scholar] [CrossRef]
- Chang, C.; Wang, Q.; Jiang, J.; Wu, T. Lithium-Ion Battery State of Health Estimation Using the Incremental Capacity and Wavelet Neural Networks with Genetic Algorithm. J. Energy Storage 2021, 38, 102570. [Google Scholar] [CrossRef]
- Li, X.; Yuan, C.; Li, X.; Wang, Z. State of Health Estimation for Li-Ion Battery Using Incremental Capacity Analysis and Gaussian Process Regression. Energy 2020, 190, 116467. [Google Scholar] [CrossRef]
- Li, X.; Yuan, C.; Wang, Z. State of Health Estimation for Li-Ion Battery via Partial Incremental Capacity Analysis Based on Support Vector Regression. Energy 2020, 203, 117852. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Y.; Wang, J.; Zhang, T. State-of-Health Estimation for Lithium-Ion Batteries by Combining Model-Based Incremental Capacity Analysis with Support Vector Regression. Energy 2022, 239, 121986. [Google Scholar] [CrossRef]
- Zhang, S.; Zhai, B.; Guo, X.; Wang, K.; Peng, N.; Zhang, X. Synchronous Estimation of State of Health and Remaining Useful Lifetime for Lithium-Ion Battery Using the Incremental Capacity and Artificial Neural Networks. J. Energy Storage 2019, 26, 100951. [Google Scholar] [CrossRef]
- Guo, Y.; Yu, P.; Zhu, C.; Zhao, K.; Wang, L.; Wang, K. A State-of-health Estimation Method Considering Capacity Recovery of Lithium Batteries. Int. J. Energy Res. 2022, 46, 23730–23745. [Google Scholar] [CrossRef]
- Bian, X.; Wei, Z.G.; Li, W.; Pou, J.; Sauer, D.U.; Liu, L. State-of-Health Estimation of Lithium-Ion Batteries by Fusing an Open-Circuit-Voltage Model and Incremental Capacity Analysis. IEEE Trans. Power Electron. 2022, 37, 2226–2236. [Google Scholar] [CrossRef]
- Jiang, B.; Zhu, J.; Wang, X.; Wei, X.; Shang, W.; Dai, H. A Comparative Study of Different Features Extracted from Electrochemical Impedance Spectroscopy in State of Health Estimation for Lithium-Ion Batteries. Appl. Energy 2022, 322, 119502. [Google Scholar] [CrossRef]
- Obregon, J.; Han, Y.-R.; Ho, C.W.; Mouraliraman, D.; Lee, C.W.; Jung, J.-Y. Convolutional Autoencoder-Based SOH Estimation of Lithium-Ion Batteries Using Electrochemical Impedance Spectroscopy. J. Energy Storage 2023, 60, 106680. [Google Scholar] [CrossRef]
- Locorotondo, E.; Cultrera, V.; Pugi, L.; Berzi, L.; Pierini, M.; Lutzemberger, G. Development of a Battery Real-Time State of Health Diagnosis Based on Fast Impedance Measurements. J. Energy Storage 2021, 38, 102566. [Google Scholar] [CrossRef]
- Messing, M.; Shoa, T.; Habibi, S. Estimating Battery State of Health Using Electrochemical Impedance Spectroscopy and the Relaxation Effect. J. Energy Storage 2021, 43, 103210. [Google Scholar] [CrossRef]
- Yang, Q.; Xu, J.; Li, X.; Xu, D.; Cao, B. State-of-Health Estimation of Lithium-Ion Battery Based on Fractional Impedance Model and Interval Capacity. Int. J. Electr. Power Energy Syst. 2020, 119, 105883. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, Y.; Zhang, Y.; Wang, L.; Wang, K. Summary of Health-State Estimation of Lithium-Ion Batteries Based on Electrochemical Impedance Spectroscopy. Energies 2023, 16, 5682. [Google Scholar] [CrossRef]
- Zhang, Q.; Huang, C.-G.; Li, H.; Feng, G.; Peng, W. Electrochemical Impedance Spectroscopy Based State-of-Health Estimation for Lithium-Ion Battery Considering Temperature and State-of-Charge Effect. IEEE Trans. Transp. Electrific. 2022, 8, 4633–4645. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, L.; Li, D.; Wang, K. State-of-Health Estimation of Lithium-Ion Batteries Based on Electrochemical Impedance Spectroscopy: A Review. Prot. Control. Mod. Power Syst. 2023, 8, 41. [Google Scholar] [CrossRef]
- Zhang, W.; He, H.; Li, T.; Yuan, J.; Xie, Y.; Long, Z. Lithium-Ion Battery State of Health Prognostication Employing Multi-Model Fusion Approach Based on Image Coding of Charging Voltage and Temperature Data. Energy 2024, 296, 131095. [Google Scholar] [CrossRef]
- Tian, J.; Xiong, R.; Shen, W. State-of-Health Estimation Based on Differential Temperature for Lithium Ion Batteries. IEEE Trans. Power Electron. 2020, 35, 10363–10373. [Google Scholar] [CrossRef]
- Ong, S.K.; Chang, M.M.L.; Nee, A.Y.C. Product Disassembly Sequence Planning: State-of-the-Art, Challenges, Opportunities and Future Directions. Int. J. Prod. Res. 2021, 59, 3493–3508. [Google Scholar] [CrossRef]
- Xiao, J.; Gao, J.; Anwer, N.; Eynard, B. Multi-Agent Reinforcement Learning Method for Disassembly Sequential Task Optimization Based on Human–Robot Collaborative Disassembly in Electric Vehicle Battery Recycling. J. Manuf. Sci. Eng. 2023, 145, 121001. [Google Scholar] [CrossRef]
- Hartono, N.; Ramírez, F.J.; Pham, D.T. Optimisation of Robotic Disassembly Plans Using the Bees Algorithm. Robot. Comput. Integr. Manuf. 2022, 78, 102411. [Google Scholar] [CrossRef]
- Gao, J.; Wang, G.; Xiao, J.; Zheng, P.; Pei, E. Partially Observable Deep Reinforcement Learning for Multi-Agent Strategy Optimization of Human-Robot Collaborative Disassembly: A Case of Retired Electric Vehicle Battery. Robot. Comput. Integr. Manuf. 2024, 89, 102775. [Google Scholar] [CrossRef]
- Allagui, A.; Belhadj, I.; Plateaux, R.; Hammadi, M.; Penas, O.; Aifaoui, N. Reinforcement Learning for Disassembly Sequence Planning Optimization. Comput. Ind. 2023, 151, 103992. [Google Scholar] [CrossRef]
- Chu, M.; Chen, W. Human-Robot Collaboration Disassembly Planning for End-of-Life Power Batteries. J. Manuf. Syst. 2023, 69, 271–291. [Google Scholar] [CrossRef]
- Xiao, J.; Anwer, N.; Li, W.; Eynard, B.; Zheng, C. Dynamic Bayesian Network-Based Disassembly Sequencing Optimization for Electric Vehicle Battery. CIRP J. Manuf. Sci. Technol. 2022, 38, 824–835. [Google Scholar] [CrossRef]
- Chen, Z.; Li, L.; Zhao, F.; Sutherland, J.W.; Yin, F. Disassembly Sequence Planning for Target Parts of End-of-Life Smartphones Using Q-Learning Algorithm. Procedia CIRP 2023, 116, 684–689. [Google Scholar] [CrossRef]
- Guo, H.; Zhang, L.; Ren, Y.; Li, Y.; Zhou, Z.; Wu, J. Optimizing a Stochastic Disassembly Line Balancing Problem with Task Failure via a Hybrid Variable Neighborhood Descent-Artificial Bee Colony Algorithm. Int. J. Prod. Res. 2023, 61, 2307–2321. [Google Scholar] [CrossRef]
- Wang, K.; Guo, J.; Du, B.; Li, Y.; Tang, H.; Li, X.; Gao, L. A Novel MILP Model and an Improved Genetic Algorithm for Disassembly Line Balancing and Sequence Planning with Partial Destructive Mode. Comput. Ind. Eng. 2023, 186, 109704. [Google Scholar] [CrossRef]
- Zhang, X.; Eltouny, K.; Liang, X.; Behdad, S. Automatic Screw Detection and Tool Recommendation System for Robotic Disassembly. J. Manuf. Sci. Eng. 2023, 145, 031008. [Google Scholar] [CrossRef]
- Terven, J.; Córdova-Esparza, D.-M.; Romero-González, J.-A. A Comprehensive Review of YOLO Architectures in Computer Vision: From YOLOv1 to YOLOv8 and YOLO-NAS. Mach. Learn. Knowl. Extr. 2023, 5, 1680–1716. [Google Scholar] [CrossRef]
- Foo, G.; Kara, S.; Pagnucco, M. Artificial Learning for Part Identification in Robotic Disassembly Through Automatic Rule Generation in an Ontology. IEEE Trans. Automat. Sci. Eng. 2023, 20, 296–309. [Google Scholar] [CrossRef]
- Zheng, S.; Lan, F.; Baronti, L.; Pham, D.T.; Castellani, M. Automatic Identification of Mechanical Parts for Robotic Disassembly Using the PointNet Deep Neural Network. Int. J. Manuf. Res. 2022, 17, 1–21. [Google Scholar] [CrossRef]
- Foo, G.; Kara, S.; Pagnucco, M. Screw Detection for Disassembly of Electronic Waste Using Reasoning and Re-Training of a Deep Learning Model. Procedia CIRP 2021, 98, 666–671. [Google Scholar] [CrossRef]
- Li, X.; Li, M.; Wu, Y.; Zhou, D.; Liu, T.; Hao, F.; Yue, J.; Ma, Q. Accurate Screw Detection Method Based on Faster R-CNN and Rotation Edge Similarity for Automatic Screw Disassembly. Int. J. Comput. Integr. Manuf. 2021, 34, 1177–1195. [Google Scholar] [CrossRef]
- Tulbure, A.-A.; Tulbure, A.-A.; Dulf, E.-H. A Review on Modern Defect Detection Models Using DCNNs—Deep Convolutional Neural Networks. J. Adv. Res. 2022, 35, 33–48. [Google Scholar] [CrossRef]
- Tabernik, D.; Šela, S.; Skvarč, J.; Skočaj, D. Segmentation-Based Deep-Learning Approach for Surface-Defect Detection. J. Intell. Manuf. 2020, 31, 759–776. [Google Scholar] [CrossRef]
- Medak, D.; Posilovic, L.; Subasic, M.; Budimir, M.; Loncaric, S. Automated Defect Detection From Ultrasonic Images Using Deep Learning. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2021, 68, 3126–3134. [Google Scholar] [CrossRef]
- Zhang, G.; Pan, Y.; Zhang, L. Semi-Supervised Learning with GAN for Automatic Defect Detection from Images. Autom. Constr. 2021, 128, 103764. [Google Scholar] [CrossRef]
- Wang, G.; Wu, H.; Xiao, J. A Genetic Algorithm-Based Optimization Approach for Disassembly Tool Selections toward Electric Vehicle Battery Disassembly. In Proceedings of the 2023 9th International Conference on Mechatronics and Robotics Engineering (ICMRE), Shenzhen, China, 10 February 2023; pp. 192–196. [Google Scholar]
- Liang, W.; Zhang, Z.; Zhang, Y.; Xu, P.; Yin, T. Improved Social Spider Algorithm for Partial Disassembly Line Balancing Problem Considering the Energy Consumption Involved in Tool Switching. Int. J. Prod. Res. 2023, 61, 2250–2266. [Google Scholar] [CrossRef]
- Özceylan, E.; Kalayci, C.B.; Güngör, A.; Gupta, S.M. Disassembly Line Balancing Problem: A Review of the State of the Art and Future Directions. Int. J. Prod. Res. 2019, 57, 4805–4827. [Google Scholar] [CrossRef]
- Ren, Y.; Gao, K.; Fu, Y.; Li, D.; Suganthan, P.N. Ensemble Artificial Bee Colony Algorithm with Q-Learning for Scheduling Bi-Objective Disassembly Line. Appl. Soft Comput. 2024, 155, 111415. [Google Scholar] [CrossRef]
- Wang, K.; Li, X.; Gao, L.; Li, P.; Gupta, S.M. A Genetic Simulated Annealing Algorithm for Parallel Partial Disassembly Line Balancing Problem. Appl. Soft Comput. 2021, 107, 107404. [Google Scholar] [CrossRef]
- Yin, T.; Zhang, Z.; Jiang, J. A Pareto-Discrete Hummingbird Algorithm for Partial Sequence-Dependent Disassembly Line Balancing Problem Considering Tool Requirements. J. Manuf. Syst. 2021, 60, 406–428. [Google Scholar] [CrossRef]
- Bakhtiyari, A.N.; Wang, Z.; Wang, L.; Zheng, H. A Review on Applications of Artificial Intelligence in Modeling and Optimization of Laser Beam Machining. Opt. Laser Technol. 2021, 135, 106721. [Google Scholar] [CrossRef]
- Ding, H.; Wang, Z.; Guo, Y. Multi-Objective Optimization of Fiber Laser Cutting Based on Generalized Regression Neural Network and Non-Dominated Sorting Genetic Algorithm. Infrared Phys. Technol. 2020, 108, 103337. [Google Scholar] [CrossRef]
- Pimenov, D.Y.; Bustillo, A.; Wojciechowski, S.; Sharma, V.S.; Gupta, M.K.; Kuntoğlu, M. Artificial Intelligence Systems for Tool Condition Monitoring in Machining: Analysis and Critical Review. J. Intell. Manuf. 2023, 34, 2079–2121. [Google Scholar] [CrossRef]
- Serin, G.; Sener, B.; Ozbayoglu, A.M.; Unver, H.O. Review of Tool Condition Monitoring in Machining and Opportunities for Deep Learning. Int. J. Adv. Manuf. Technol. 2020, 109, 953–974. [Google Scholar] [CrossRef]
- Freepik Icon by Kiranshastry. Available online: https://www.freepik.com (accessed on 8 August 2024).
- Wu, H. A Survey of Battery Swapping Stations for Electric Vehicles: Operation Modes and Decision Scenarios. IEEE Trans. Intell. Transport. Syst. 2022, 23, 10163–10185. [Google Scholar] [CrossRef]
- Cui, D.; Wang, Z.; Liu, P.; Wang, S.; Dorrell, D.G.; Li, X.; Zhan, W. Operation Optimization Approaches of Electric Vehicle Battery Swapping and Charging Station: A Literature Review. Energy 2023, 263, 126095. [Google Scholar] [CrossRef]
- NIO Power—NIO. Available online: https://www.nio.com/nio-power?noredirect= (accessed on 16 May 2024).
- Valdes-Dapena, P. Tesla Failed at Battery Swapping but Stellantis Says It May Have the Secret; CNN Business. Available online: https://www.cnn.com/2023/12/08/business/tesla-battery-swapping-stellantis/index.html (accessed on 16 May 2024).
- Yang, X.; Shao, C.; Zhuge, C.; Sun, M.; Wang, P.; Wang, S. Deploying Battery Swap Stations for Shared Electric Vehicles Using Trajectory Data. Transp. Res. Part D Transp. Environ. 2021, 97, 102943. [Google Scholar] [CrossRef]
- Wang, S.; Chen, A.; Wang, P.; Zhuge, C. Short-Term Electric Vehicle Battery Swapping Demand Prediction: Deep Learning Methods. Transp. Res. Part D Transp. Environ. 2023, 119, 103746. [Google Scholar] [CrossRef]
- Yang, J.; Liu, W.; Ma, K.; Yue, Z.; Zhu, A.; Guo, S. An Optimal Battery Allocation Model for Battery Swapping Station of Electric Vehicles. Energy 2023, 272, 127109. [Google Scholar] [CrossRef]
- Abuzied, H.; Senbel, H.; Awad, M.; Abbas, A. A Review of Advances in Design for Disassembly with Active Disassembly Applications. Eng. Sci. Technol. Int. J. 2020, 23, 618–624. [Google Scholar] [CrossRef]
- Mao, J.; Ye, C.; Zhang, S.; Xie, F.; Zeng, R.; Davey, K.; Guo, Z.; Qiao, S. Toward Practical Lithium-Ion Battery Recycling: Adding Value, Tackling Circularity and Recycling-Oriented Design. Energy Environ. Sci. 2022, 15, 2732–2752. [Google Scholar] [CrossRef]
- Nanda, S.; Gupta, A.; Manthiram, A. Anode-Free Full Cells: A Pathway to High-Energy Density Lithium-Metal Batteries. Adv. Energy Mater. 2021, 11, 2000804. [Google Scholar] [CrossRef]
- Heubner, C.; Maletti, S.; Auer, H.; Hüttl, J.; Voigt, K.; Lohrberg, O.; Nikolowski, K.; Partsch, M.; Michaelis, A. From Lithium-Metal toward Anode-Free Solid-State Batteries: Current Developments, Issues, and Challenges. Adv. Funct. Mater. 2021, 31, 2106608. [Google Scholar] [CrossRef]
- Lendlein, A.; Gould, O.E.C. Reprogrammable Recovery and Actuation Behaviour of Shape-Memory Polymers. Nat. Rev. Mater. 2019, 4, 116–133. [Google Scholar] [CrossRef]
- VanDerHorn, E.; Mahadevan, S. Digital Twin: Generalization, Characterization and Implementation. Decis. Support Syst. 2021, 145, 113524. [Google Scholar] [CrossRef]
- Liu, Y.K.; Ong, S.K.; Nee, A.Y.C. State-of-the-Art Survey on Digital Twin Implementations. Adv. Manuf. 2022, 10, 1–23. [Google Scholar] [CrossRef]
- Nee, A.Y.C.; Ong, S.K.; Chryssolouris, G.; Mourtzis, D. Augmented Reality Applications in Design and Manufacturing. CIRP Ann. 2012, 61, 657–679. [Google Scholar] [CrossRef]
- Fei, B.; Yang, W.; Chen, W.; Li, Z.; Li, Y.; Ma, T.; Hu, X.; Ma, L. Comprehensive Review of Deep Learning-Based 3D Point Cloud Completion Processing and Analysis. IEEE Trans. Intell. Transport. Syst. 2022, 23, 22862–22883. [Google Scholar] [CrossRef]
- Yuan, G.; Liu, X.; Zhang, C.; Pham, D.T.; Li, Z. A New Heuristic Algorithm Based on Multi-Criteria Resilience Assessment of Human–Robot Collaboration Disassembly for Supporting Spent Lithium-Ion Battery Recycling. Eng. Appl. Artif. Intell. 2023, 126, 106878. [Google Scholar] [CrossRef]
- Guo, L.; Zhang, Z.; Zhang, X. Human–Robot Collaborative Partial Destruction Disassembly Sequence Planning Method for End-of-Life Product Driven by Multi-Failures. Adv. Eng. Inform. 2023, 55, 101821. [Google Scholar] [CrossRef]
- Xu, W.; Cui, J.; Liu, B.; Liu, J.; Yao, B.; Zhou, Z. Human-Robot Collaborative Disassembly Line Balancing Considering the Safe Strategy in Remanufacturing. J. Clean. Prod. 2021, 324, 129158. [Google Scholar] [CrossRef]
- Liu, H.; Wang, L. Collision-Free Human-Robot Collaboration Based on Context Awareness. Robot. Comput. Integr. Manuf. 2021, 67, 101997. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, J.; Wang, P.; Law, J.; Calinescu, R.; Mihaylova, L. A Deep Learning-Enhanced Digital Twin Framework for Improving Safety and Reliability in Human–Robot Collaborative Manufacturing. Robot. Comput. Integr. Manuf. 2024, 85, 102608. [Google Scholar] [CrossRef]
- Park, S.-W.; Son, S.-Y. Techno-Economic Analysis for the Electric Vehicle Battery Aging Management of Charge Point Operator. Energy 2023, 280, 128095. [Google Scholar] [CrossRef]
- Chung, C.-H.; Jangra, S.; Lai, Q.; Lin, X. Optimization of Electric Vehicle Charging for Battery Maintenance and Degradation Management. IEEE Trans. Transport. Electrific. 2020, 6, 958–969. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, G.; Zhou, C.; Li, M.; Chen, Z. Lithium-Ion Battery Optimal Charging Using Moth-Flame Optimization Algorithm and Fractional-Order Model. IEEE Trans. Transp. Electrific. 2023, 9, 4981–4989. [Google Scholar] [CrossRef]
- Jiang, B.; Berliner, M.D.; Lai, K.; Asinger, P.A.; Zhao, H.; Herring, P.K.; Bazant, M.Z.; Braatz, R.D. Fast Charging Design for Lithium-Ion Batteries via Bayesian Optimization. Appl. Energy 2022, 307, 118244. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Research focus | Authors |
|---|---|---|
| 2019 | Lithium-ion battery recycling, including pyrometallurgical recovery, physical materials’ separation, hydrometallurgical metals’ reclamation, direct recycling, and biological metals’ reclamation. | Harper et al. [12] |
| 2022 | Regulations and new battery directive demand, including current material collection, sorting, transportation, handling, and recycling practices. | Neumann et al. [13] |
| 2022 | Artificial intelligence and machine learning applications in EV battery disassembly, including preprocessing, disassembly planning and operation, intelligent interaction and collaboration, and smart design for disassembly. | Meng et al. [14] |
| 2023 | LIB recycling methods, including pretreatment, pyrometallurgical recycling, hydrometallurgical recycling, the direct recycling of spent cathode materials, the direct recycling of graphite anode materials, and advanced in situ characterization methods. | Ji et al. [15] |
| 2023 | The comprehensive recycling of lithium-ion batteries, including pretreatment, deactivation, dismantling, crushing, and the separation and treatment of electrolytes and solid components. | Yu et al. [16] |
| 2024 | Challenges and opportunities for second-life batteries, including battery degradation models, technical assessment procedures, and economic assessment. | Gu et al. [17] |
| 2024 | Human–robot collaboration-based EV battery disassembly, including product modeling, disassembly planning, and disassembly operations. | Li et al. [18] |
| 2024 | Interpretation from different directions about electric vehicle battery systems’ disassembly, including process steps, the level of automation, the use of digital technologies, the level of implementation, and efficiency consideration. | Hertel et al. [19] |
| 2024 | A more systematic summary of artificial intelligence applications in electric vehicle battery disassembly, including battery state-of-health detection, disassembly sequence planning, and disassembly operation. | This review |
| Database | Keywords |
|---|---|
| Scopus | TITLE-ABS-KEY (electric AND vehicle* OR ev*) AND ALL (batter*) AND ALL (disassembl* OR dismant*) AND ALL (artificial AND intelligence OR ai) |
| Web of Science | (((AB=(electric vehicle* or ev)) AND AB=(batter*)) AND AB=(artificial intelligence or ai)) |
| Google Scholar | “electric vehicle* OR EV*” AND “batter*” AND “disassembly OR dismantle*” AND “artificial intelligence OR AI” |
| AI Method | Description | Advantages | Disadvantages | Ref. |
|---|---|---|---|---|
| RF | A powerful and flexible ensemble learning method that improves model accuracy and robustness by combining multiple decision trees. |
|
| [41,42,43,44] |
| LSTM | A recurrent neural network capable of learning and remembering long-term dependencies; often used to process sequence data such as time series analysis and natural language processing. |
|
| [45,46,47,48,49] |
| TL | Using knowledge learned from one task (the source task) to aid the learning process in another related but different task (the target task). |
|
| [39,50,51,52,53,54,55,56,57] |
| SVM | A powerful and flexible supervised learning algorithm that handles linear and nonlinear classification tasks by maximizing inter-class margins and using kernel functions. |
|
| [58,59,60,61] |
| CNN | A powerful deep learning model that automatically extracts features through convolutional and pooling layers and that is widely used in tasks such as image classification, target detection, and image segmentation. |
|
| [62,63,64,65,66,67] |
| Parameter | Description | Advantages | Disadvantages | Ref. |
|---|---|---|---|---|
| Capacity |
|
|
| [68,71,72,73,74,75,76,77,78,79] |
| Impedance |
|
|
| [69,80,81,82,83,84,85,86,87] |
| Temperature |
|
|
| [70,88,89] |
| Methods | Description | Applications | Ref. | |
|---|---|---|---|---|
| Machine learning | Dynamic Bayesian network |
| EV battery | Xiao et al. [96] |
| Q-network |
| No mention | Allagui et al. [94] | |
| Q-learning |
| Smartphone | Chen et al. [97] | |
| Multi-agent reinforcement learning |
| EV battery | Xiao et al. [91] | |
| Metaheuristics optimization algorithm | Bees algorithm |
| Gear pump | Hartono et al. [92] |
| Artificial Bee Colony Algorithm |
| Cell phone | Guo et al. [98] | |
| Genetic algorithm |
| CRT TV | Wang et al. [99] | |
| Particle swarm optimization |
| EV battery | Chu et al. [95] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ai, Z.; Nee, A.Y.C.; Ong, S.K. Artificial Intelligence in Electric Vehicle Battery Disassembly: A Systematic Review. Automation 2024, 5, 484-507. https://doi.org/10.3390/automation5040028
Ai Z, Nee AYC, Ong SK. Artificial Intelligence in Electric Vehicle Battery Disassembly: A Systematic Review. Automation. 2024; 5(4):484-507. https://doi.org/10.3390/automation5040028
Chicago/Turabian StyleAi, Zekai, A. Y. C. Nee, and S. K. Ong. 2024. "Artificial Intelligence in Electric Vehicle Battery Disassembly: A Systematic Review" Automation 5, no. 4: 484-507. https://doi.org/10.3390/automation5040028
APA StyleAi, Z., Nee, A. Y. C., & Ong, S. K. (2024). Artificial Intelligence in Electric Vehicle Battery Disassembly: A Systematic Review. Automation, 5(4), 484-507. https://doi.org/10.3390/automation5040028