
The Transition to True North in Air Navigation from the Avionics Perspective †

Abstract
:1. Introduction
2. Preparedness of the Aviation Directional Sensors for a Transition to True North
3. Natural and Free Directional Reference
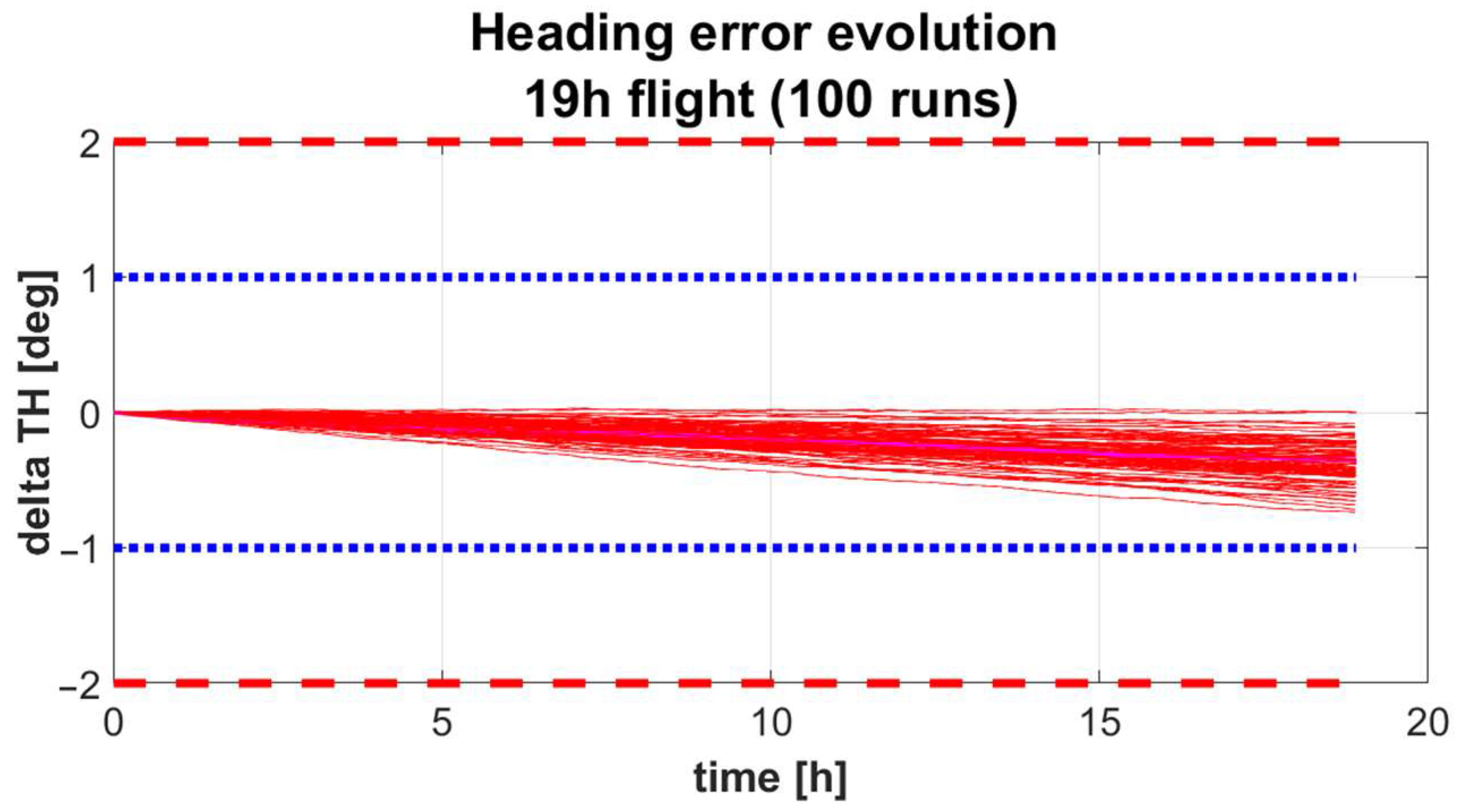
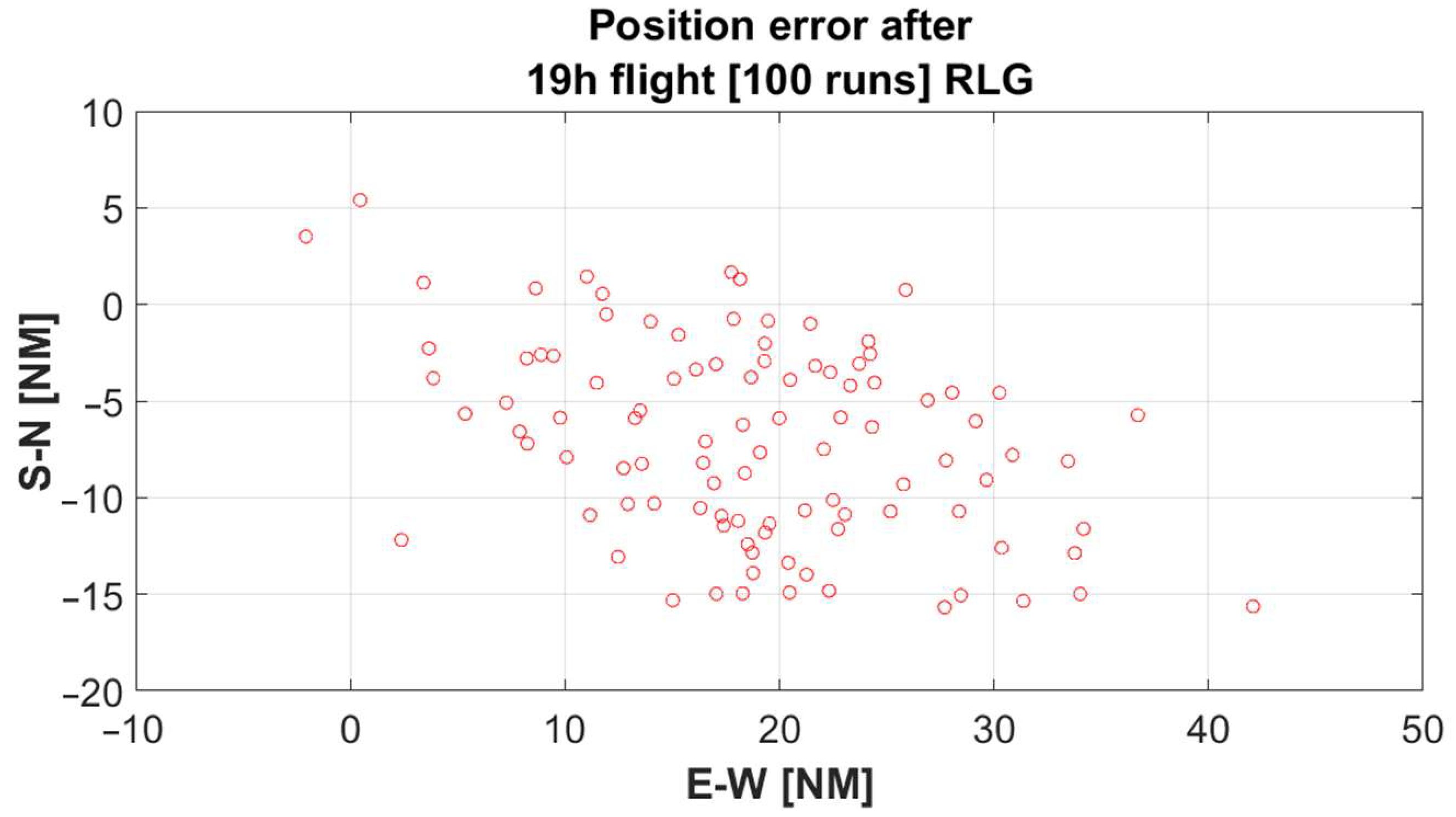
4. IRS Errors During a Long Flight
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pleter, O.T.; Constantinescu, C.E. Study on the Transition to True North in Air Navigation. Aerospace 2023, 10, 912. [Google Scholar] [CrossRef]
- MacKay, A.; Banning, B. Moving from Magnetic to True North in Aviation, presentation to EUROCONTROL Safety Team. 22 February 2024, unpublished. Available online: https://www.icao.int/safety/OPS/OPS-Section/Documents/ICAO%20TN%20Webinar.pdf (accessed on 13 September 2024).
- Pleter, O.T. Air Navigation; Springer Aerospace Technology Series; Springer: Cham, Switzerland, 2024. [Google Scholar]
- EASA Part-25, CS Book 1. Available online: https://www.easa.europa.eu/sites/default/files/dfu/CS-25_Amdt%203_19.09.07_Consolidated%20version.pdf (accessed on 13 September 2024).
- FAA TSO C6c—Direction Instrument, Magnetic (Gyroscopically Stabilized). Available online: https://drs.faa.gov/browse/excelExternalWindow/105C5F1D6A24683D862573DE005AC663.0001 (accessed on 15 September 2024).
- ICAO. Annex 6—Operation of Aircraft; ICAO: Montreal, QC, Canada, 2022. [Google Scholar]
- ICAO. Annex 10, Volume I—Radio Navigation Aids; ICAO: Montreal, QC, Canada, 2023. [Google Scholar]
- FAA Order 6750.24E— Instrument Landing System and Ancillary Electronic Component Configuration and Performance Requirements. Available online: https://drs.faa.gov/browse/excelExternalWindow/DRSDOCID119613350220230117182018.0001 (accessed on 15 September 2024).
- FAA Advisory Circular AC 120-28D. Available online: https://drs.faa.gov/browse/excelExternalWindow/BBADA17DA0D0BBD1862569BA006F64D0.0001 (accessed on 13 September 2024).
- EUROCONTROL Specification for Instrument Landing System (ILS). Available online: https://skybrary.aero/articles/instrument-landing-system-ils (accessed on 13 September 2024).
- FAA Order 9840.1—U.S. National Aviation Standard for the VOR/DME/TACAN Systems. Available online: https://www.faa.gov/regulations_policies/orders_notices/index.cfm/go/document.information/documentid/12082 (accessed on 15 September 2024).
- FAA Advisory Circular AC 90-94. Guidelines for using Global Positioning System Equipment for IFR En Route and Terminal Operations and for Nonprecision Instrument Approaches in the U.S. National Airspace System. Available online: https://www.faa.gov/regulations_policies/advisory_circulars/index.cfm/go/document.information/documentid/74460 (accessed on 13 September 2024).
- EUROCAE ED-52—MPS for conventional and Doppler VHF omnirange (C VOR and D VOR) (ground equipment). Available online: https://eshop.eurocae.net/eurocae-documents-and-reports/ed-52/# (accessed on 13 September 2024).
- ICAO. Annex 10, Volume IV—Surveillance Radar and Collision Avoidance Systems; ICAO: Montreal, QC, Canada, 2023. [Google Scholar]
- EUROCONTROL Specification for Surveillance Systems. Available online: https://www.eurocontrol.int/sites/default/files/2023-06/eurocontrol-spec-esassp-vol-1.pdf (accessed on 13 September 2024).
- FAA Order JO 6330.5C— Maintenance Of Airport Surface Detection Equipment (ASDE-3) Collocated With Airport Movement Area Safety System (AMASS). Available online: https://www.faa.gov/regulations_policies/orders_notices/index.cfm/go/document.information/documentID/1021392 (accessed on 13 September 2024).
- FAA Advisory Circular AC 20-151C Airworthiness Approval of Traffic Alert and Collision Avoidance Systems (TCAS II), Versions 7.0 & 7.1 and Associated Mode S Transponders. Available online: https://drs.faa.gov/browse/excelExternalWindow/3E508AA318155B2E86258195006EFC2C.0001 (accessed on 13 September 2024).
- EUROCAE ED-117—MOPS for Mode S Multilateration Systems for Use in A-SMGCS. Available online: https://eshop.eurocae.net/eurocae-documents-and-reports/ed-117a/# (accessed on 13 September 2024).
- IMO Resolution MSC.401(95). Available online: https://wwwcdn.imo.org/localresources/en/KnowledgeCentre/IndexofIMOResolutions/MSCResolutions/MSC.401(95).pdf (accessed on 13 September 2024).
- IALA Guideline 1112 on eLoran. Available online: https://www.iala.int/product/g1112/ (accessed on 13 September 2024).
- Federal Radionavigation Plan (FRP) 2017. Available online: https://rosap.ntl.bts.gov/view/dot/32801/dot_32801_DS1.pdf (accessed on 13 September 2024).
- General Lighthouse Authorities (GLA) eLoran Information. Available online: https://www.gla-rad.org/ (accessed on 13 September 2024).
- USCG Navigation Center—Loran-C Information. Available online: https://www.navcen.uscg.gov/loran-c-specification (accessed on 13 September 2024).
- FAA TSO-C4c—Inertial Navigation Systems. Available online: https://drs.faa.gov/browse/excelExternalWindow/1106C2B67A48BB7A86256DA3005D1462.0001 (accessed on 15 September 2024).
- FAA TSO-C5f—Airborne Attitude Heading Reference. Available online: https://drs.faa.gov/browse/excelExternalWindow/DRSDOCID136386667220231122145319.0001 (accessed on 15 September 2024).
- FAA AC 25-4—Inertial Navigation Systems on the certification of INS on transport category airplanes. Available online: https://www.faa.gov/regulations_policies/advisory_circulars/index.cfm/go/document.information/documentid/22459 (accessed on 13 September 2024).
- FAA AC 20-138D—Airworthiness Approval of Positioning and Navigation Systems. Available online: https://drs.faa.gov/browse/excelExternalWindow/87BEE4061F1C8D4086257CAF006B0C2C.0001 (accessed on 13 September 2024).
- EASA CS-ACNS—Certification Specifications for Airborne CNS. Available online: https://www.easa.europa.eu/en/downloads/136330/en (accessed on 13 September 2024).
- EASA AMC 20-4—Airworthiness Approval and Operational Criteria for the Use of Navigation Systems. Available online: https://www.easa.europa.eu/sites/default/files/dfu/Easy%20Access%20Rules%20AMC-20%20%28Amendment%204%29.pdf (accessed on 13 September 2024).
- FAA TSO-C145—Airborne Navigation Sensors Using The Global Positioning System Augmented By The Satellite Based Augmentation System (SBAS). Available online: https://drs.faa.gov/browse/excelExternalWindow/EFE54F1E6272A7068625811D0064B679.0001 (accessed on 15 September 2024).
- FAA TSO-C146—Stand-Alone and Multi-Mode GPS Receivers. Available online: https://drs.faa.gov/browse/excelExternalWindow/EFE10BFF3187F9A78625811A005E32A6.0001 (accessed on 15 September 2024).
- FAA AC 90-100A—U.S. Terminal and En Route Area Navigation (RNAV) Operations. Available online: https://drs.faa.gov/browse/excelExternalWindow/5C94E4F44BA319A98625729C00612F37.0001 (accessed on 13 September 2024).
- FAA AC 90-105A—Approval Guidance for RNP Operations. Available online: https://drs.faa.gov/browse/excelExternalWindow/DRSDOCID195761270820240724220858.0001 (accessed on 13 September 2024).
- EASA AMC 20-27—Airworthiness Approval and Operational Criteria for RNP RNAV Operations. Available online: https://www.easa.europa.eu/sites/default/files/dfu/agency-measures-docs-agency-decisions-2009-2009-019-R-Annex-III---AMC-20-27.pdf (accessed on 13 September 2024).
- ICAO. Doc 9613—Performance-Based Navigation (PBN) Manual; ICAO: Montreal, QC, Canada, 2023. [Google Scholar]
- Inside GNSS Magnetic Sensors in Flight Tests as Alternative PNT to GNSS, 15 June 2020. Available online: https://insidegnss.com/183615-2/ (accessed on 15 September 2024).
- Irani, G.B.; Christ, J.P. Image Processing for Tomahawk Scene Matching. Johns Hopkins APL Tech. Dig. 1994, 15, 250–264. [Google Scholar]
- Boeing. Boeing 777 Maintenance Manual Part 1—Reference 34-20-00; Boeing Corporation proprietary unpublished manual; Boeing: Washington, DC, USA.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Directional Sensor | HDG Mode | TRK Mode |
|---|---|---|
| Compass/Flux Valve/Magnetometer | Direct | - |
| Gyroscope/Laser Gyro/MEMS | Direct/Integration 1 | - |
| Instrument Landing System ILS | - | Direct |
| VHF Omnidirectional Range VOR | - | Direct |
| Secondary RADAR SSR | - | Differentiation |
| LORAN/eLORAN | - | Differentiation |
| Inertial Reference System IRS | Direct | Direct |
| Global Positioning System GPS/GNSS | - | Differentiation |
| Magnetic Navigation | - | Differentiation |
| Terrain Contour Matching | Direct | Differentiation |
| Directional Sensor | Native Reference/Reference in Use | Transition to True |
|---|---|---|
| Compass/Flux Valve/Magnetometer | MN/MN | via MAGVAR database |
| Gyroscope/Laser Gyro/MEMS | Remote star/Airframe 1/MN | changing correction |
| Instrument Landing System ILS | Runway axis/MN | easy (procedural) |
| VHF Omnidirectional Range VOR | Phase of VOR signal/MN | easy (procedural) |
| Secondary RADAR SSR | Phase of antenna/MN | easy (procedural) |
| LORAN/eLORAN | TN/TN | - |
| Inertial Reference System IRS | TN/TN | - |
| Global Positioning System GPS/GNSS | TN/TN | - |
| Magnetic Navigation | TN/TN | - |
| Terrain Contour Matching | TN/TN | - |
| Directional Sensor | Required/Typical Accuracy | Native Datum | References |
|---|---|---|---|
| Compass/Flux Valve/Magnetometer | ±10°/±0.2° | MN | [4] |
| Gyroscope | ±2° | agnostic | [5,6] |
| Laser Gyro | see IRS | - | - |
| Instrument Landing System ILS | ±0.5°/±0.2° | agnostic | [7,8,9,10] |
| VHF Omnidirectional Range VOR | ±1° target ±5°/3° localizer | agnostic | [7,11,12,13] |
| Secondary RADAR SSR | ±0.2°/±0.05° | agnostic | [14,15,16,17,18] |
| LORAN/eLORAN | - | TN | [19,20,21,22,23] |
| Inertial Reference System IRS | ±0.2° align ±0.8° flight/±0.03° align 0.1° flight | TN | [24,25,26,27,28,29] |
| Global Positioning System GPS/GNSS | - | TN | [7,27,28,30,31,32,33,34,35] |
| Magnetic Navigation | classified | TN | [36] |
| Terrain Contour Matching | classified | TN | [37] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pleter, O.T.; Constantinescu, C.E. The Transition to True North in Air Navigation from the Avionics Perspective. Eng. Proc. 2025, 90, 11. https://doi.org/10.3390/engproc2025090011
Pleter OT, Constantinescu CE. The Transition to True North in Air Navigation from the Avionics Perspective. Engineering Proceedings. 2025; 90(1):11. https://doi.org/10.3390/engproc2025090011
Chicago/Turabian StylePleter, Octavian Thor, and Cristian Emil Constantinescu. 2025. "The Transition to True North in Air Navigation from the Avionics Perspective" Engineering Proceedings 90, no. 1: 11. https://doi.org/10.3390/engproc2025090011
APA StylePleter, O. T., & Constantinescu, C. E. (2025). The Transition to True North in Air Navigation from the Avionics Perspective. Engineering Proceedings, 90(1), 11. https://doi.org/10.3390/engproc2025090011