


Towards More Automated Airport Ground Operations Including Engine-Off Taxiing Techniques Within the Auto-Steer Taxi at AIRport (ASTAIR) Project †

 , , , , ,
, , , , ,  and
and {kind=link}
{kind=link}
Abstract
1. Introduction
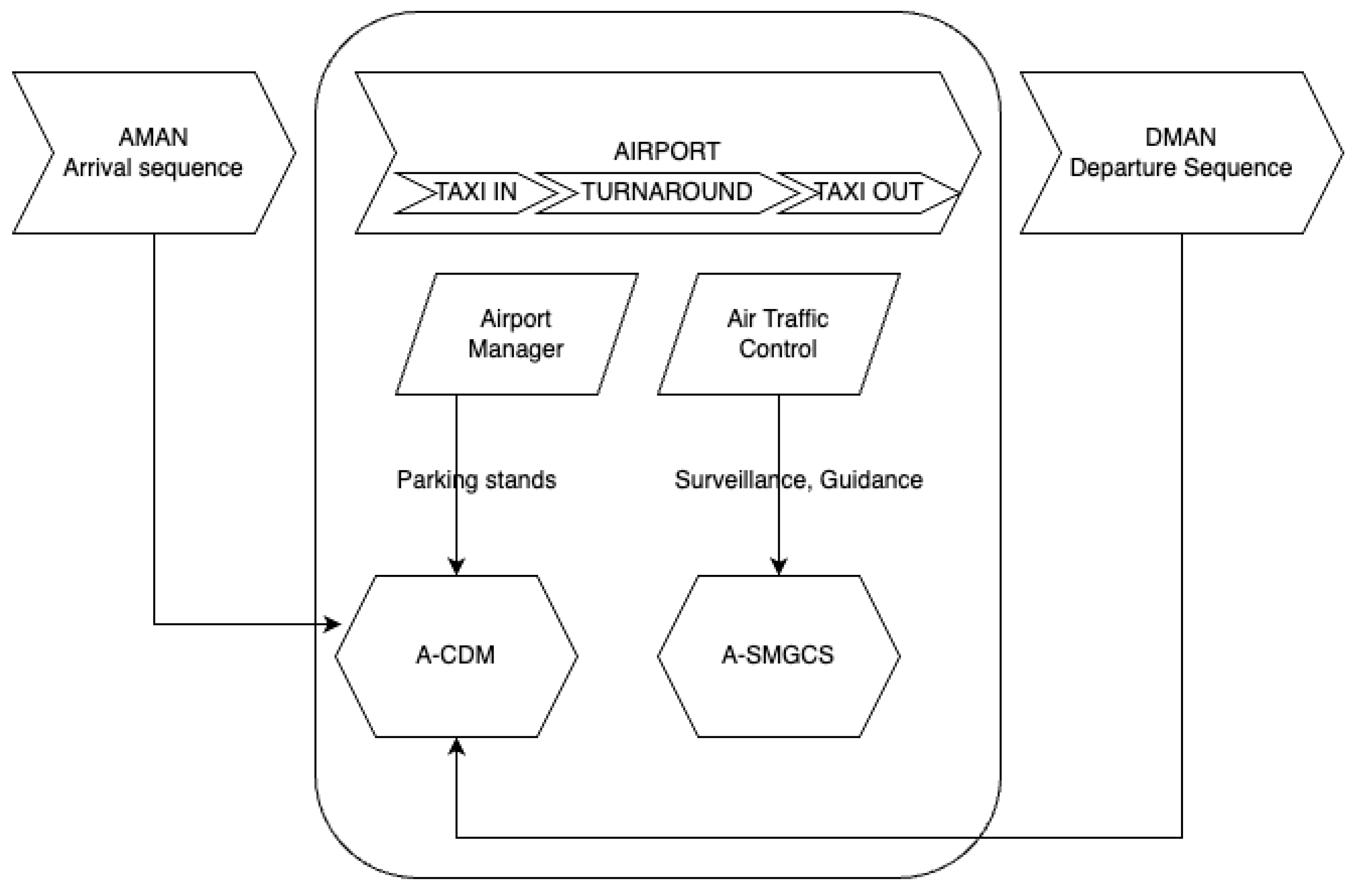
2. ASTAIR’s Scope and Envisioned Concept of Operations
2.1. Normal Operations for a Departure Aircraft
2.2. Normal Operations for an Arrival Aircraft
2.3. Envisioned Concept of Operations
3. Workshops and Interviews to Explore the Concept and Identify Use Cases
3.1. Method
3.2. Results
Selected Use Cases
- Normal Operations
- Normal Operations with Rescheduling
- Arriving Traffic Without Parking
- Automation Failure
- Runway Mode of Operation Modification
- Remote Holding
- Arriving Flights with Technical Issues
- High-Level Taxi Strategy Tuning
4. Discussion
4.1. Human–Automation Teaming
4.2. Liability
- Speed clearances/speed profiles: The airport assumes responsibility for incidents if speed clearances are issued.
- Solution #1: Advise pilots regarding a point with a time constraint instead of issuing speed clearances, although this may lead to non-conflict-free taxiing. As noted in a workshop, changing the recommendations frequently can reduce pilots’ trust in the system and increase their workload.
- Solution #2: Have tug drivers manage taxiing while towing the aircraft, which would utilize their familiarity with the ASTAIR platform and reduce pilots’ mental workload.
- Use speed recommendations rather than strict constraints, placing the speed management responsibility on pilots. Then, the AI that computes conflict-free routes will take into account this additional uncertainty in the execution of its routing clearances.
Specific safety nets for autonomous taxiing vehicle surveillance and gradual alerting systems may be necessary. - Higher levels of automation: These raise questions about trust in AI and its liability implications. The participants expressed concerns about regulatory views and responsibility in the event of an incident; for example, a participant noted, “AI can plan, but execution should remain human”.
5. Conclusions
- Vehicles able to follow routing clearance with speed profiles are required. Although several solutions exist, the resilience of the multi-agent system under deviations from the plan should be evaluated, as well as the impact on the airport capacity.
- Transforming operator work into supervisory work requires a high level of confidence in AI and good communication between the operator and the system. Human–machine interfaces and interactions must be carefully designed.
- Taking full control on the taxi phase of aircraft gives the full responsibility of the vehicle to airport managers. Potential mitigation solutions should be studied.
- Fast-time simulation to finely validate the multi-agent path planning implemented in the ASTAIR AI to measure the capacity of the algorithm;
- Real-time simulation to showcase the concept and the dedicated HMI designed to facilitate human–automation teaming;
- Workshops with professional operators to validate the feasibility of the concept, although the TRL level is still quite low.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Advanced Engine Off Navigation, Project Website. Available online: https://www.aeon-project.eu/ (accessed on 1 September 2024).
- Taxibot Home Site. Available online: https://taxibot-international.com/ (accessed on 1 September 2024).
- Usher AI Home Site. Available online: https://usher-ai.com/ (accessed on 1 September 2024).
- Autonomous Airbus Aces Autopilot Taxi, Takeoff and Landing Tests, New Atlas. Available online: https://newatlas.com/aircraft/airbus-attol-autonomous-airliner/ (accessed on 7 May 2024).
- Human Centric Approach to AI in Aviation, May 2023 Version 2.0. Available online: https://www.easa.europa.eu/en/document-library/general-publications/easa-artificial-intelligence-roadmap-20 (accessed on 1 September 2024).
- Airport Collaborative Decision-Making (A-CDM) Implementation Manual, March 2017 Version 5.0. Available online: https://www.eurocontrol.int/concept/airport-collaborative-decision-making (accessed on 1 September 2024).
- EUROCONTROL Specification for A-SMGCS Services, 22 April 2020 Edition 2.0. Available online: https://www.eurocontrol.int/publication/eurocontrol-specification-smgcs-services (accessed on 1 September 2024).

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garcia, J.; Vo, D.-B.; Brock, A.; Peyruqueou, V.; Battut, A.; Cousy, M.; Čanádyová, V.; Sharpanskykh, A.; Ermiş, G. Towards More Automated Airport Ground Operations Including Engine-Off Taxiing Techniques Within the Auto-Steer Taxi at AIRport (ASTAIR) Project. Eng. Proc. 2025, 90, 15. https://doi.org/10.3390/engproc2025090015
Garcia J, Vo D-B, Brock A, Peyruqueou V, Battut A, Cousy M, Čanádyová V, Sharpanskykh A, Ermiş G. Towards More Automated Airport Ground Operations Including Engine-Off Taxiing Techniques Within the Auto-Steer Taxi at AIRport (ASTAIR) Project. Engineering Proceedings. 2025; 90(1):15. https://doi.org/10.3390/engproc2025090015
Chicago/Turabian StyleGarcia, Jérémie, Dong-Bach Vo, Anke Brock, Vincent Peyruqueou, Alexandre Battut, Mathieu Cousy, Vladimíra Čanádyová, Alexei Sharpanskykh, and Gülçin Ermiş. 2025. "Towards More Automated Airport Ground Operations Including Engine-Off Taxiing Techniques Within the Auto-Steer Taxi at AIRport (ASTAIR) Project" Engineering Proceedings 90, no. 1: 15. https://doi.org/10.3390/engproc2025090015
APA StyleGarcia, J., Vo, D.-B., Brock, A., Peyruqueou, V., Battut, A., Cousy, M., Čanádyová, V., Sharpanskykh, A., & Ermiş, G. (2025). Towards More Automated Airport Ground Operations Including Engine-Off Taxiing Techniques Within the Auto-Steer Taxi at AIRport (ASTAIR) Project. Engineering Proceedings, 90(1), 15. https://doi.org/10.3390/engproc2025090015