Validation of a Wearable IMU System for Gait Analysis: Protocol and Application to a New System

 , ,
, ,  ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Validation Protocol Design Guidelines
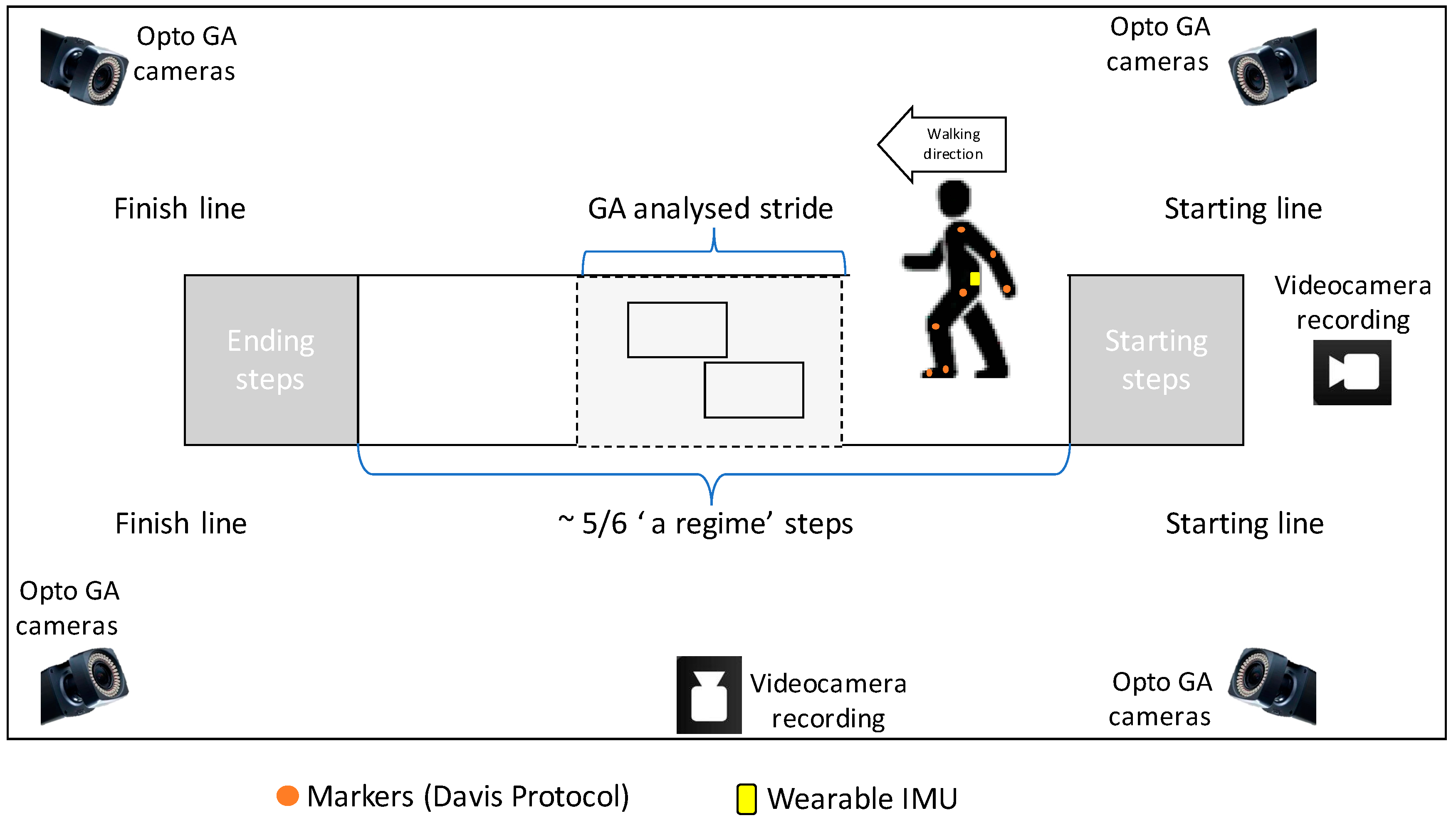
2.2. Experimental Setup for Validation
- Excellence: for ε% < 5%
- Good: if 5% ≤ ε% < 10%
- Sufficient: if 10% ≤ ε% < 20%
- Not acceptable: in case of ε% ≥ 20%
2.3. Specifications of the New Wearable System and Its Data to Be Validated
3. Results
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chambers, H.G.; Sutherland, D.H. A Practical Guide to Gait Analysis. J. Am. Acad. Orthop. Surg. 2002, 10, 222–231. [Google Scholar] [CrossRef] [PubMed]
- Stolze, H.; Kuhtz-Buschbeck, J.P.; Mondwurf, C.; Boczek-Funcke, A.; Johnk, K.; Deuschl, G.; Illerta, M. Gait analysis during treadmill and overground locomotion in children and adults. Electroencephalogr. Clin. Neurophysiol. Mot. Control 1997, 105, 490–497. [Google Scholar] [CrossRef]
- Alton, F.; Baldey, L.; Caplan, S.; Morrissey, M.C. A kinematic comparison of overground andtreadmill walking. Clin. Biomech. 1998, 13, 434–440. [Google Scholar] [CrossRef]
- Watt, J.R.; Franz, J.R.; Jackson, K.; Dicharry, J.; Riley, P.O.; Kerrigan, D.C. A three-dimensional kinematic and kinetic comparison of overground and treadmill walking in healthy elderly subjects. Clin. Biomech. 2010, 25, 444–449. [Google Scholar] [CrossRef] [PubMed]
- Wall, J.C.; Charteris, J. A kinematic study of long-term habituation to treadmill walking. Ergonomics 1981, 24, 531–542. [Google Scholar] [CrossRef] [PubMed]
- Xsens Technologies, Enschede, The Netherlands. Available online: https://www.xsens.com/ (accessed on 17 January 2018).
- Yost Labs, Portsmouth, OH, USA. Available online: https://yostlabs.com/ (accessed on 17 January 2018).
- Sprager, S.; Juric, M.B. Inertial Sensor-Based Gait Recognition: A Review. Sensors 2015, 15, 22089–22127. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moe-Nilssen, R.; Helbostad, J.L. Estimation of gait cycle characteristics by trunk accelerometry. J. Biomech. 2004, 37, 121–126. [Google Scholar] [CrossRef]
- Zijlstra, W.; Hof, A.L. Assessment of spatio-temporal gait parameters from trunk accelerations during human walking. Gait Posture 2003, 18, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Patel, S.; Park, H.; Bonato, P.; Chan, L.; Rodgers, M. A review of wearable sensors and systems with application in rehabilitation. J. Neuroeng. Rehabil. 2012, 9, 21. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Spulber, I.; Papi, E.; Chen, Y.-M.; Anastasova-Ivanova, S.; Bergmann, J.; Georgiou, P.; McGregor, A.H. Development of a wireless multi-functional body sensing platform for smart garment integration. In Proceedings of the 2014 IEEE Biomedical Circuits and Systems Conference (BioCAS), Lausanne, Switzerland, 22–24 October 2014. [Google Scholar]
- Andreoni, G.; Standoli, C.E.; Perego, P. Defining Requirements and Related Methods for Designing Sensorized Garments. Sensors 2016, 16, 769. [Google Scholar] [CrossRef] [PubMed]
- Lymberis, A.; Gatzoulis, L. Wearable Health Systems: From smart technologies to real applications. In Proceedings of the 28th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 31 August–3 September 2006; pp. 6789–6792. [Google Scholar]
- Tao, W.; Liu, T.; Zheng, R.; Feng, H. Gait Analysis Using Wearable Sensors. Sensors 2012, 12, 2255–2283. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Muro-de-la-Herran, A.; Garcia-Zapirain, B.; Mendez-Zorrilla, A. Gait Analysis Methods: An Overview of Wearable and Non-Wearable Systems, Highlighting Clinical Applications. Sensors 2014, 14, 3362–3394. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pantelopoulos, A.; Bourbakis, N.G. A Survey on Wearable Sensor-Based Systems for Health Monitoring and Prognosis. IEEE Trans. Syst. Man Cybern. Part C 2010, 40, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Holt, K.G.; Hamill, J.; Andres, R.O. The force-driven harmonic oscillator as a model for human locomotion. Hum. Mov. Sci. 1990, 9, 55–68. [Google Scholar] [CrossRef]
- Valérie Renaudin, V.; Susi, M.; Lachapelle, G. Step Length Estimation Using Handheld Inertial Sensors. Sensors 2012, 12, 8507–8525. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Capela, N.A.; Lemaire, E.D.; Baddour, N. Novel algorithm for a smartphone-based 6-minute walk test application: Algorithm, application development, and evaluation. J. Neuroeng. Rehabil. 2015, 12, 19. [Google Scholar] [CrossRef] [PubMed]
- Cresswell, K.G.; Shin, Y.; Chen, S. Quantifying Variation in Gait Features from Wearable Inertial Sensors Using Mixed Effects Models. Sensors 2017, 17, 466. [Google Scholar] [CrossRef] [PubMed]
- Qiu, S.; Wang, Z.; Zhao, H.; Hu, H. Using Distributed Wearable Sensors to Measure and Evaluate Human Lower Limb Motions. IEEE Trans. Instrum. Meas. 2016, 65, 939–950. [Google Scholar] [CrossRef] [Green Version]
- Fusca, M.; Perego, P.; Andreoni, G. A Novel Kinematic Model for Wearable Gait Analysis. In Proceedings of the eTELEMED 2017: The Ninth International Conference on eHealth, Telemedicine, and Social Medicine, Nice, France, 19–23 March 2017; pp. 123–128. [Google Scholar]
- Fusca, M.; Perego, P.; Andreoni, G. Method for wearable kinematic gait analysis using a harmonic oscillator applied to the Center of Mass. J. Sens. 2018, 2018, 4548396. [Google Scholar] [CrossRef]
- Patterson, M.R.; Johnston, W.; O’Mahony, N.; O’Mahony, S.; Nolan, E.; Caulfield, B. Validation of temporal gait metrics from three IMU locations to the gold standard force plate. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 667–671. [Google Scholar]
- Bland, J.M.; Altman, D.G. Statistical methods for assessing agreement between two methods of clinical measurement. Lancet 1986, 1, 307–310. [Google Scholar] [CrossRef]
- Oberg, T.; Karsznia, A.; Oberg, K. Basic gait parameters: Reference data for normal subjects, 10–79 years of age. J. Rehabil. Res. Dev. 1993, 30, 210–222. [Google Scholar] [PubMed]
- Al-Obaidi, S.; Wall, J.C.; Al-Yaqoub, A.; Al-Ghanim, M. Basic gait parameters: A comparison of reference data for normal subjects 20 to 29 years of age from Kuwait and Scandinavia. J. Rehabil. Res. Dev. 2003, 40, 361–366. [Google Scholar] [CrossRef] [PubMed]
- Davis, R.B., III; Ounpuu, S.; Tyburski, D.; Gage, J.R. A gait analysis data collection and reduction technique. Hum. Mov. Sci. 1991, 10, 575–587. [Google Scholar] [CrossRef]
- Jakobsen, J.C.; Gluud, C.; Winkel, P.; Lange, T.; Wetterslev, J. The thresholds for statistical and clinical significance—A five-step procedure for evaluation of intervention effects in randomised clinical trials. BMC Med. Res. Methodol. 2014, 14, 34. [Google Scholar] [CrossRef] [PubMed]
- Orendurff, M.S.; Segal, A.D.; Klute, G.K.; Berge, J.S.; Rohr, E.S.; Kadel, N.J. The effect of walking speed on center of mass displacement. J. Rehabil. Res. Dev. 2004, 41, 829–834. [Google Scholar] [CrossRef] [PubMed]
- Jurcevic Lulic, T.; Muftic, O. Trajectory of the human body mass centre during walking at different speed. In Proceedings of the 7th International Design Conference (Design 2002), Cavtat, Croatia, 14–17 May 2002. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Subject | Weight (kg) | Height (cm) | Age (years) | BMI | Gender | Santh (cm) |
|---|---|---|---|---|---|---|
| 1 | 58 | 168 | 31 | 20.5 | F | 59.5 |
| 2 | 50 | 160 | 49 | 19.5 | F | 56.6 |
| 3 | 62 | 164 | 19 | 23.1 | F | 50.9 |
| 4 | 152 | 187 | 30 | 43.5 | M | 64 |
| 5 | 70 | 169 | 32 | 24.5 | M | 57.8 |
| 6 | 87 | 183 | 31 | 26.0 | M | 62.6 |
| 7 | 46 | 154 | 29 | 19.4 | F | 54.5 |
| 8 | 68 | 179 | 23 | 21.2 | M | 61.3 |
| 9 | 78 | 178 | 29 | 24.6 | M | 60.9 |
| 10 | 60 | 164 | 48 | 22.3 | F | 58 |
| average | 73.1 | 170.6 | 32.1 | 24.5 | 50% | 59.1 |
| standard deviation | 30.3 | 10.7 | 9.5 | 7.0 | 3.9 |
| Parameter | Reliability Criteria | |||
|---|---|---|---|---|
| Excellent | Good | Sufficient | Not Acceptable | |
| Step length | ε% < 5% (<3 cm) | 5% ≤ ε% < 10% (3 ≤ ε% < 6 cm) | 10% ≤ε% < 20% (6 ≤ ε% < 12 cm) | ε% ≥ 20% (≥12 cm) |
| Distance | ε% < 5% (<0.35 m) | 5% ≤ ε% < 10% (0.35 ≤ ε% < 0.70 m) | 10% ≤ ε% < 20% (0.70 ≤ ε% < 1.40 m) | ε% ≥ 20% (≥1.40 m) |
| Counting steps | ε% < 2% (<1 steps) | 2% ≤ ε% < 4% (1 ≤ ε% < 2 steps) | 4% ≤ ε% < 6% (2 ≤ ε% < 3 steps) | ε% ≥ 6% (≥3 steps) |
| Time | ε% < 4% (<1.2 s) | 4% ≤ ε% < 6% (1.2 ≤ ε% < 1.8 s) | 6% ≤ ε% < 8% (1.8 ≤ ε% < 2.4 s ) | ε% ≥ 8% (≥2.4 s) |
| Subj. No. | Trial | Side of the First Supporting Foot True/False | Step No. ε | Walking Time ε% | Stride Time ε% | Cadence ε% | Step Length ε% | Right Foot Step Length ε% | Left Foot Step Length ε% | Step Speed ε% | Right Foot Step Speed ε% | Left Foot Step Speed ε% |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | True | 0 | −8.3 | * | * | * | * | * | * | * | * |
| 2 | True | 0 | −16.3 | −4.8 | 3.7 | −8.4 | −2.7 | −13.2 | −13.0 | −13.2 | −12.2 | |
| 3 | True | 0 | −5.6 | 7.7 | −7.6 | −6.3 | −4.1 | −8.1 | −20.7 | −27.8 | −17.4 | |
| 4 | True | 0 | −0.6 | 0.0 | 0.4 | −10.1 | −12.0 | −8.2 | −17.7 | −14.6 | −20.9 | |
| 2 | 1 | True | 0 | −5.5 | 4.2 | −4.1 | −1.3 | 7.3 | −8.7 | −15.3 | −16.0 | −15.0 |
| 2 | True | 0 | −9.0 | −1.0 | 0.3 | −1.4 | 3.7 | −5.8 | −11.0 | −7.7 | −14.9 | |
| 3 | True | 0 | −13.3 | 4.2 | −3.9 | −5.6 | −6.9 | −4.4 | −18.4 | −15.9 | −21.0 | |
| 4 | True | 0 | −2.2 | 5.7 | −5.8 | −1.2 | −2.4 | 0.3 | −14.4 | −10.3 | −21.3 | |
| 3 | 1 | True | 0 | 5.6 | 2.5 | −2.6 | 6.4 | 7.8 | 5.6 | −5.7 | −4.1 | −8.4 |
| 2 | True | 0 | −3.6 | 1.2 | −2.0 | 3.0 | 7.8 | −1.1 | −8.4 | −5.5 | −12.6 | |
| 3 | True | 0 | 0.4 | 2.3 | −2.2 | 4.2 | 2.5 | 6.3 | −5.5 | −7.0 | −5.4 | |
| 4 | True | 0 | −14.1 | −2.7 | 2.2 | 1.4 | −4.2 | 7.8 | −6.2 | −6.3 | −6.8 | |
| 4 | 1 | True | 0 | 4.6 | −2.4 | −7.6 | −1.9 | 8.6 | −10.1 | −18.0 | −10.5 | −27.7 |
| 2 | True | 0 | −23.5 | −6.3 | 6.7 | −7.9 | 1.8 | −17.4 | −13.4 | −8.0 | −17.4 | |
| 3 | True | 0 | 10.4 | 11.2 | −10.9 | 1.7 | 5.1 | −1.4 | −17.7 | −21.8 | −20.1 | |
| 4 | True | 0 | −20.6 | −2.8 | 3.7 | −10.1 | 1.8 | −21.1 | −17.8 | −16.8 | −18.2 | |
| 5 | 1 | True | 0 | −9.9 | −6.8 | 7.8 | −5.0 | 6.0 | −15.9 | −10.1 | −7.0 | −8.3 |
| 2 | True | 0 | −9.1 | −0.5 | 0.6 | −4.0 | 7.7 | −15.5 | −11.8 | −13.5 | −10.7 | |
| 3 | True | 0 | −2.4 | 3.0 | −2.6 | 1.3 | 6.0 | −3.4 | −11.4 | −10.2 | −13.2 | |
| 4 | True | 0 | −4.3 | −8.6 | 9.4 | * | * | * | −13.4 | −6.9 | −18.4 | |
| 6 | 1 | True | 0 | −29.3 | 9.8 | −8.1 | −2.3 | 5.1 | −7.5 | −19.4 | −28.7 | −14.6 |
| 2 | True | 0 | −31.8 | −2.0 | 0.2 | 0.6 | 16.4 | −10.8 | −7.9 | −0.3 | −14.0 | |
| 3 | True | 0 | −28.8 | −3.2 | 2.2 | −3.1 | 14.3 | −15.5 | −8.8 | −4.3 | −12.3 | |
| 4 | True | 0 | −24.2 | −7.1 | 7.7 | −23.5 | −29.7 | −17.5 | −24.6 | −23.6 | −26.8 | |
| 7 | 1 | True | −1 | −29.9 | * | * | * | * | * | * | * | * |
| 2 | True | 0 | −21.6 | 7.3 | −6.6 | 9.5 | 15.6 | 3.5 | −8.6 | −4.5 | −14.6 | |
| 3 | True | 0 | −21.9 | −19.7 | 6.7 | 0.2 | −9.2 | 9.9 | −5.1 | −6.0 | −5.1 | |
| 4 | True | 0 | −22.6 | −4.8 | 5.0 | −3.1 | −5.5 | −0.7 | −8.0 | −7.7 | −12.4 | |
| 8 | 1 | True | 0 | −30.4 | −7.9 | 9.1 | −7.2 | 2.8 | −17.1 | −10.5 | −10.2 | −8.2 |
| 2 | True | 0 | −20.8 | −5.8 | 5.9 | −6.9 | 8.1 | −21.4 | −13.4 | −8.9 | −14.8 | |
| 3 | True | 0 | −19.3 | −17.6 | 5.2 | −4.8 | 7.1 | −16.5 | −11.2 | −4.5 | −15.3 | |
| 4 | True | 0 | −21.3 | −11.0 | 12.7 | −9.4 | −20.5 | 1.2 | −9.2 | −11.5 | −7.2 | |
| 9 | 1 | True | 0 | −7.7 | −2.6 | 0.9 | −1.4 | 7.2 | −7.9 | −9.7 | −10.9 | −7.4 |
| 2 | True | 0 | −7.2 | −4.8 | 2.0 | −0.5 | 10.8 | −9.2 | −8.7 | −8.9 | −9.2 | |
| 3 | True | 0 | −18.5 | −4.4 | 3.6 | −1.2 | 8.9 | −9.2 | −9.1 | −9.0 | −9.3 | |
| 4 | True | 0 | −12.8 | 11.6 | −10.1 | −3.4 | −3.1 | −3.7 | −21.7 | −13.8 | −30.0 | |
| 10 | 1 | True | 0 | −17.3 | −3.8 | 4.0 | −10.9 | −8.2 | −13.7 | −21.5 | −20.4 | −17.4 |
| 2 | True | 0 | −28.3 | −4.7 | 2.9 | −18.5 | −23.4 | −12.1 | −22.5 | −22.8 | −23.0 | |
| 3 | True | 0 | −16.4 | 7.5 | −5.3 | −10.9 | −6.9 | −14.9 | −22.9 | −21.0 | −28.9 | |
| 4 | True | 0 | −17.3 | 4.5 | −4.3 | −9.4 | −14.8 | −4.1 | −19.5 | −27.2 | −17.9 | |
| min | −1.0 | −31.8 | −19.7 | −10.9 | −23.5 | −29.7 | −21.4 | −24.6 | −28.7 | −30.0 | ||
| max | 0.0 | 10.4 | 11.6 | 12.7 | 9.5 | 16.4 | 9.9 | −5.1 | −0.3 | −5.1 |
| Parameter | Side of the First Supporting Foot | Step No. | Walking Time | Stride Time | Cadence | Step Length | Right Foot Step Length | Left Foot Step Length | Step Speed | Right Foot Step Speed | Left Foot Step Speed |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Value | True/False | Absolute Error | abs % Error | abs % Error | abs % Error | abs % Error | abs % Error | abs % Error | abs % Error | abs % Error | abs % Error |
| mean | 0.0 | 0.0 | 14.9 | 5.7 | 4.9 | 5.6 | 8.5 | 9.5 | 13.5 | 12.3 | 15.2 |
| st.dev | 0.0 | 0.2 | 9.4 | 4.3 | 3.2 | 5.1 | 6.2 | 5.9 | 5.6 | 7.3 | 6.6 |
| min | 0.0 | 0.0 | 0.4 | 0.0 | 0.2 | 0.2 | 1.8 | 0.3 | 5.1 | 0.3 | 5.1 |
| max | 0.0 | 1.0 | 31.8 | 19.7 | 12.7 | 23.5 | 29.7 | 21.4 | 24.6 | 28.7 | 30.0 |
| reliability assessment | excellent | excellent | sufficient | excellent | excellent | good | good | good | sufficient | sufficient | sufficient |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fusca, M.; Negrini, F.; Perego, P.; Magoni, L.; Molteni, F.; Andreoni, G. Validation of a Wearable IMU System for Gait Analysis: Protocol and Application to a New System. Appl. Sci. 2018, 8, 1167. https://doi.org/10.3390/app8071167
Fusca M, Negrini F, Perego P, Magoni L, Molteni F, Andreoni G. Validation of a Wearable IMU System for Gait Analysis: Protocol and Application to a New System. Applied Sciences. 2018; 8(7):1167. https://doi.org/10.3390/app8071167
Chicago/Turabian StyleFusca, Marcello, Francesco Negrini, Paolo Perego, Luciana Magoni, Franco Molteni, and Giuseppe Andreoni. 2018. "Validation of a Wearable IMU System for Gait Analysis: Protocol and Application to a New System" Applied Sciences 8, no. 7: 1167. https://doi.org/10.3390/app8071167
APA StyleFusca, M., Negrini, F., Perego, P., Magoni, L., Molteni, F., & Andreoni, G. (2018). Validation of a Wearable IMU System for Gait Analysis: Protocol and Application to a New System. Applied Sciences, 8(7), 1167. https://doi.org/10.3390/app8071167