Continuous Steering Stability Control Based on an Energy-Saving Torque Distribution Algorithm for a Four in-Wheel-Motor Independent-Drive Electric Vehicle


Abstract
:1. Introduction
2. Design of the Steering Stability Controller Based on an Energy-Saving Torque Distribution Algorithm for 4MIDEV
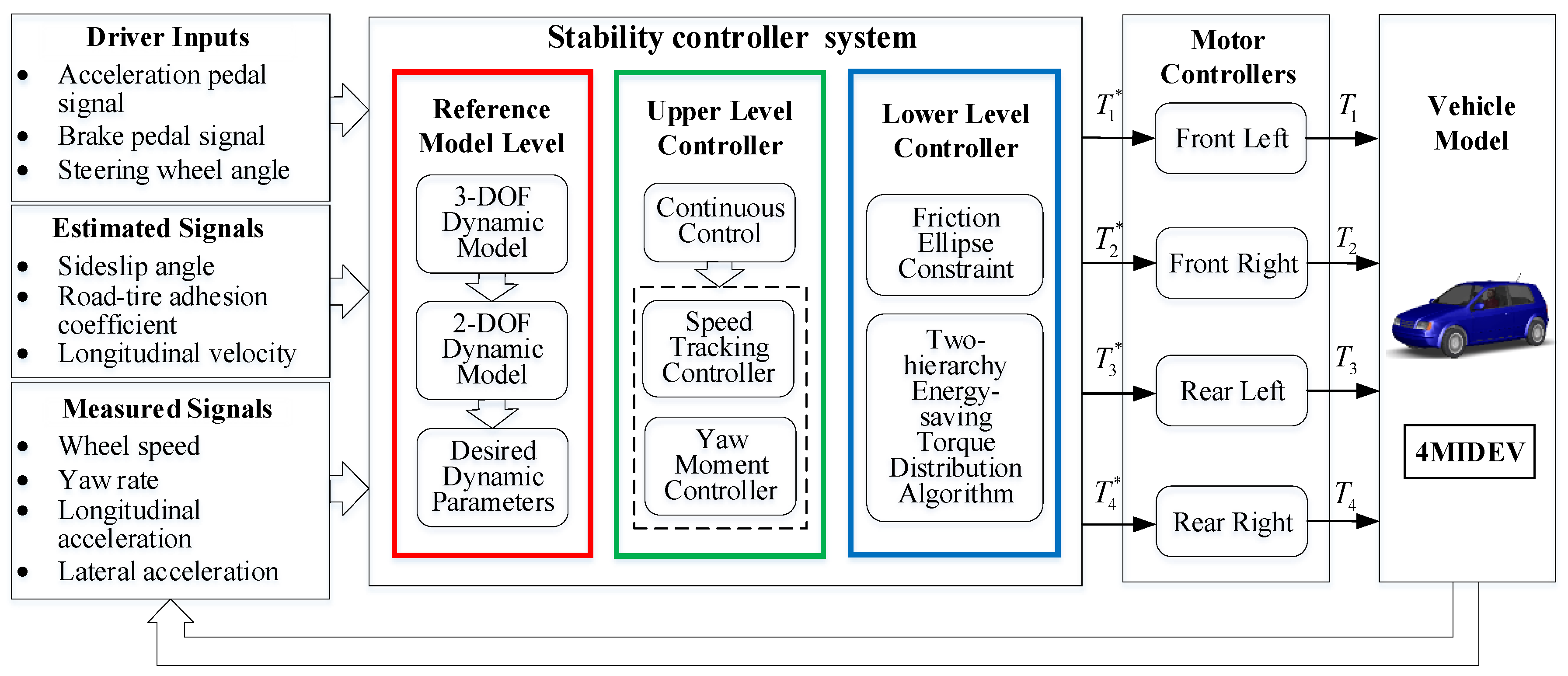
2.1. Overall Structure
2.2. Reference Model Level
2.3. Upper-Level Controller
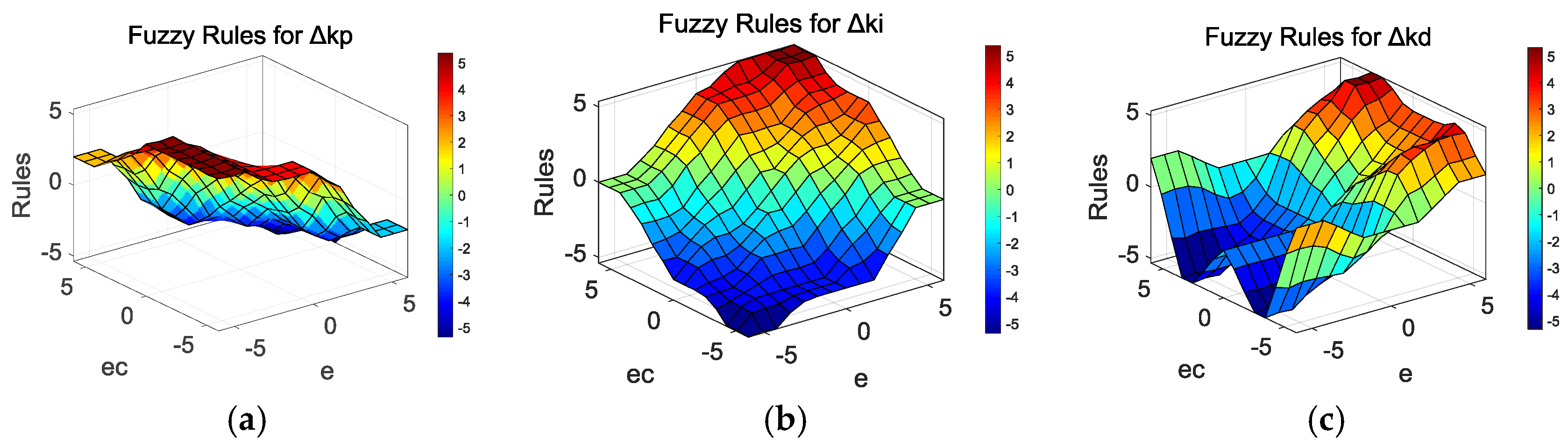
2.3.1. Speed-Tracking Controller
2.3.2. Yaw-Moment Controller
2.4. Lower-Level Controller
2.4.1. Friction Ellipse Constraint
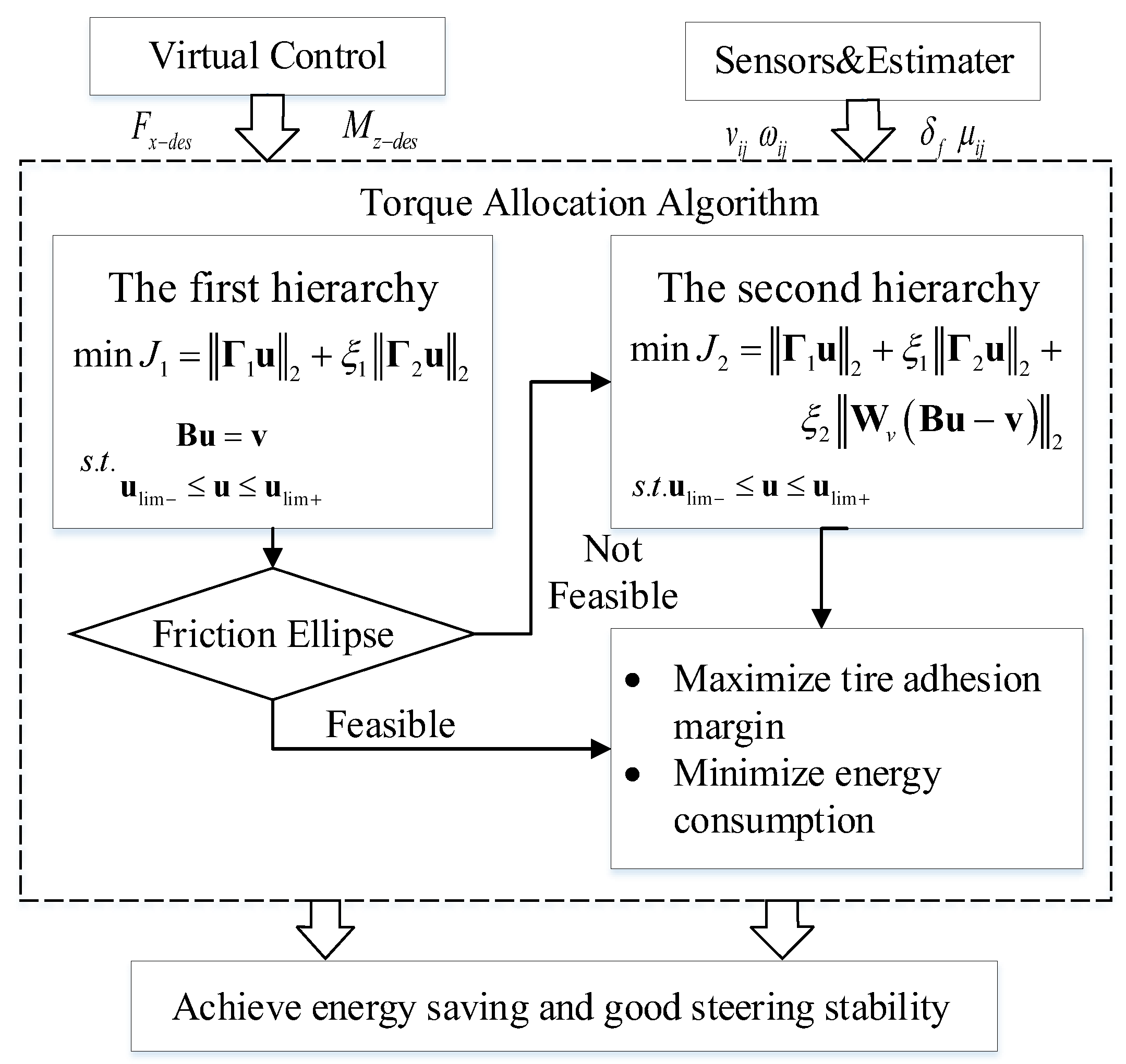
2.4.2. Energy-Saving Torque Distribution Algorithm
3. Simulation Analysis
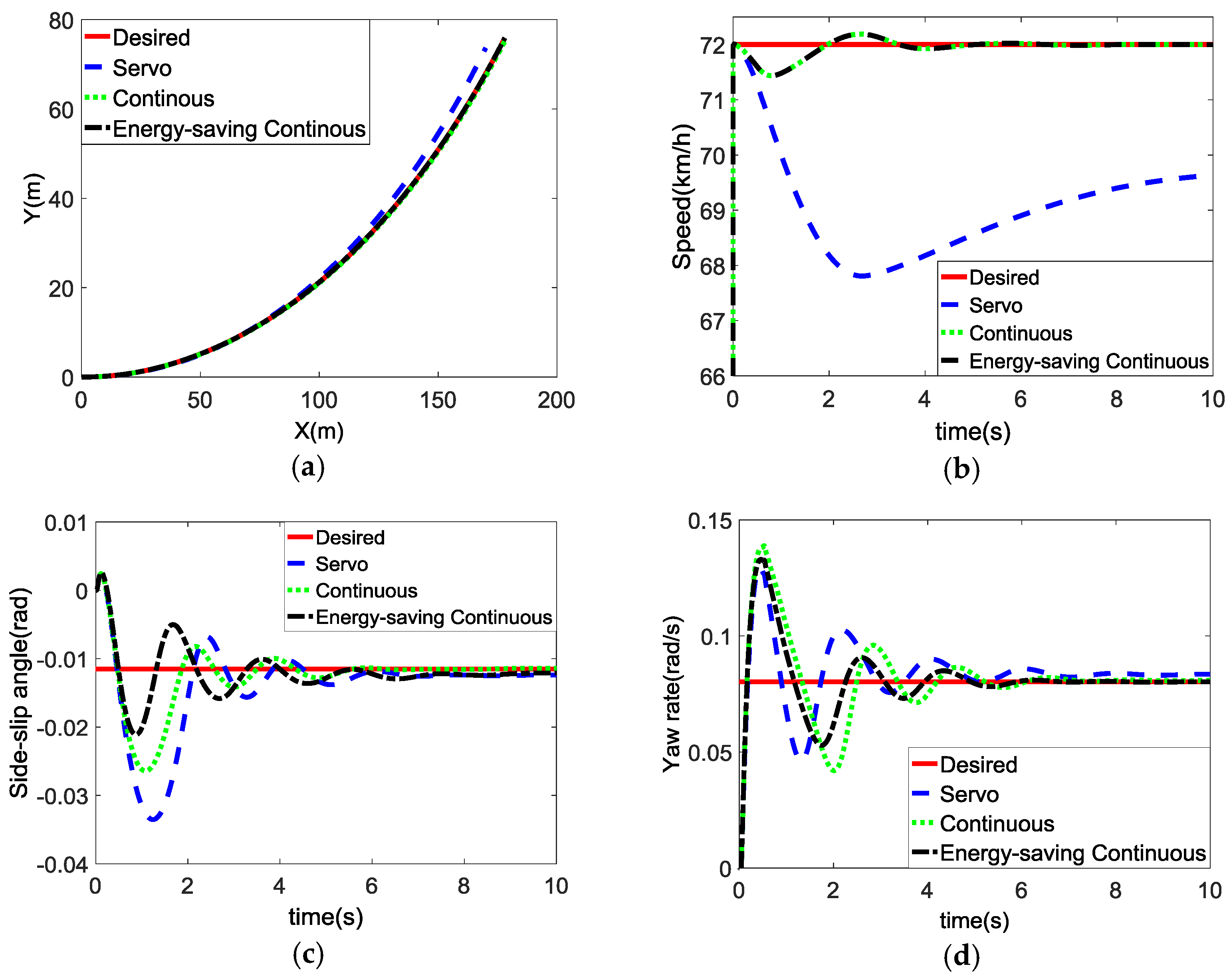
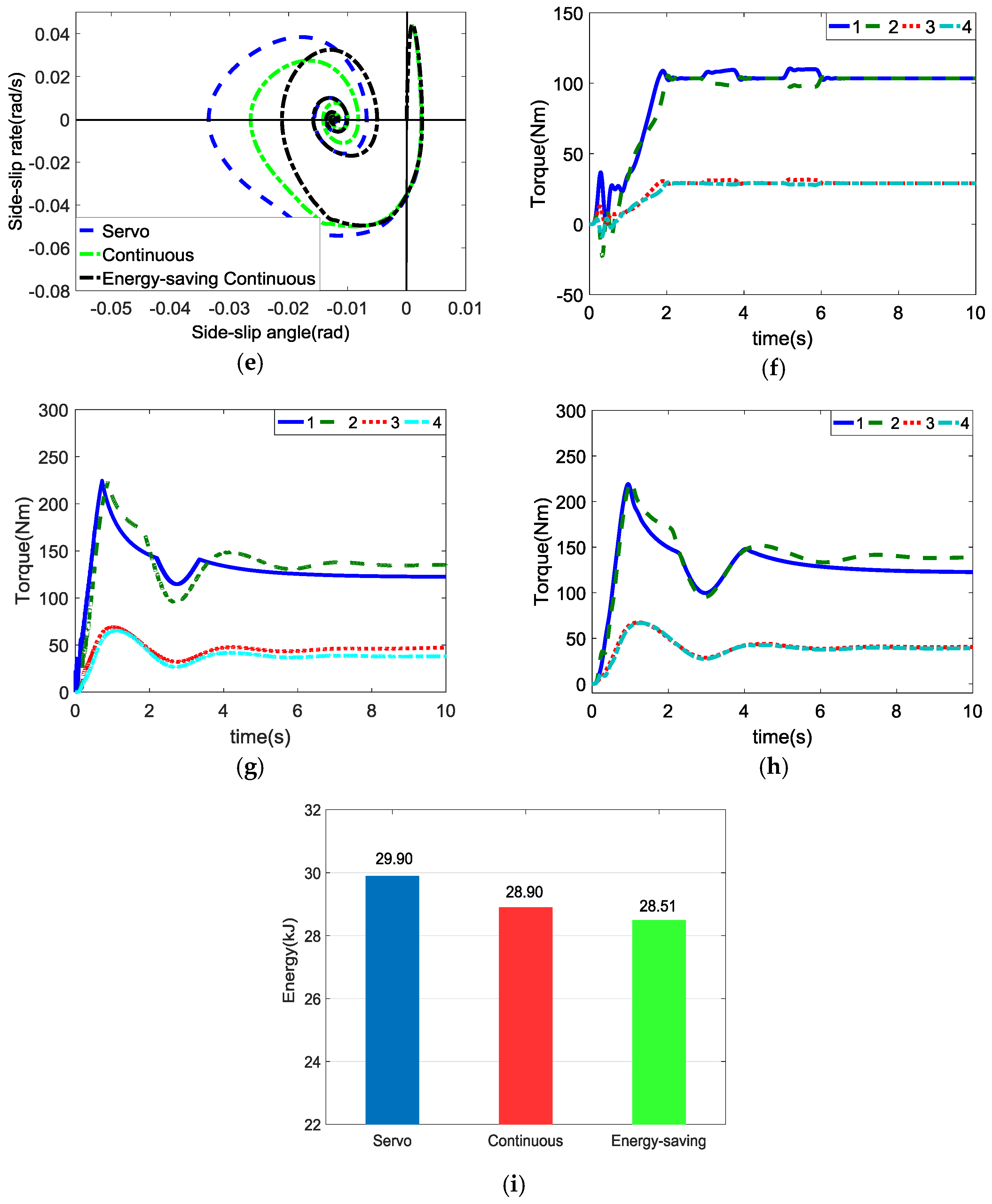
3.1. Step Steer Maneuve
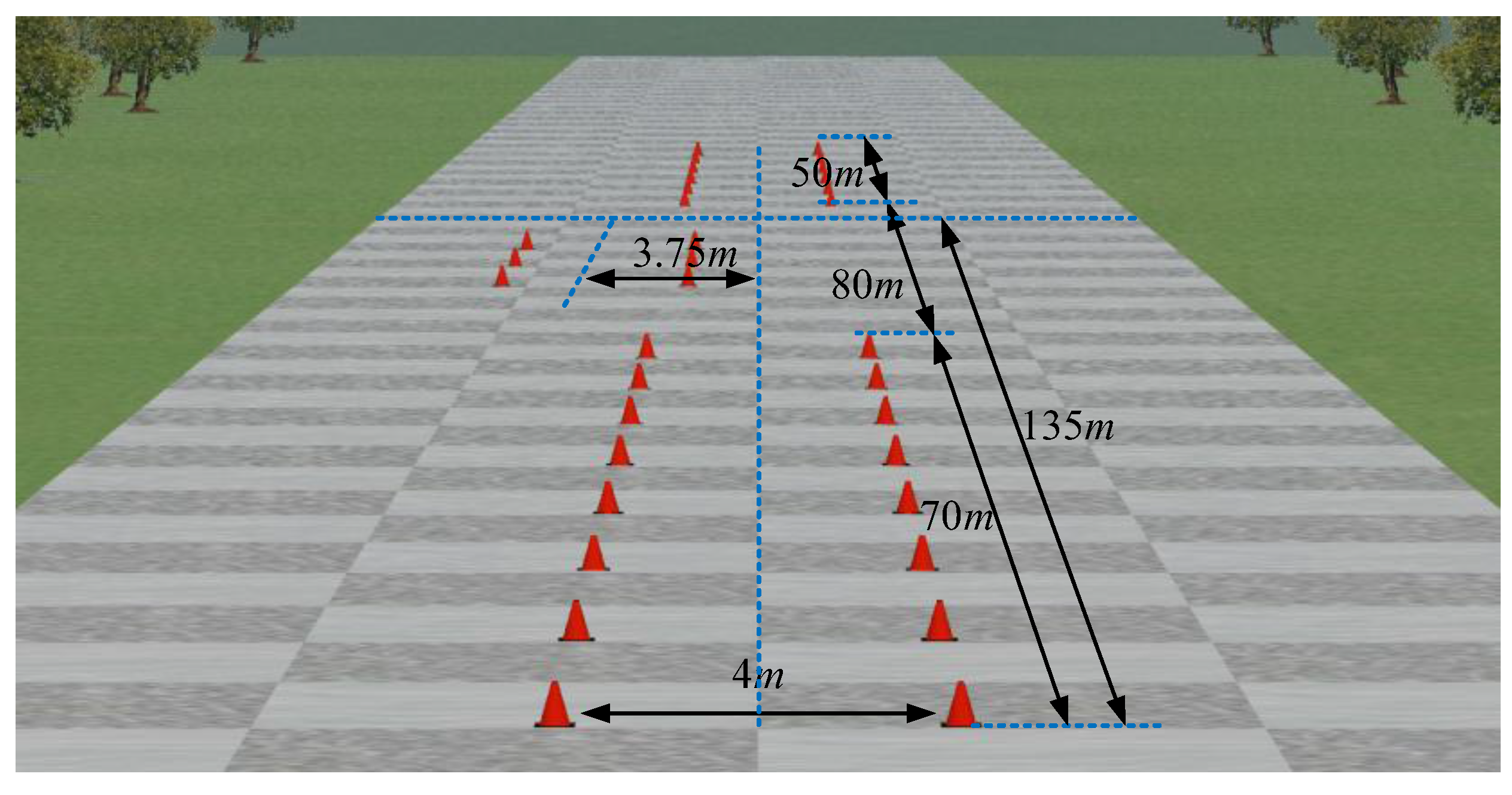
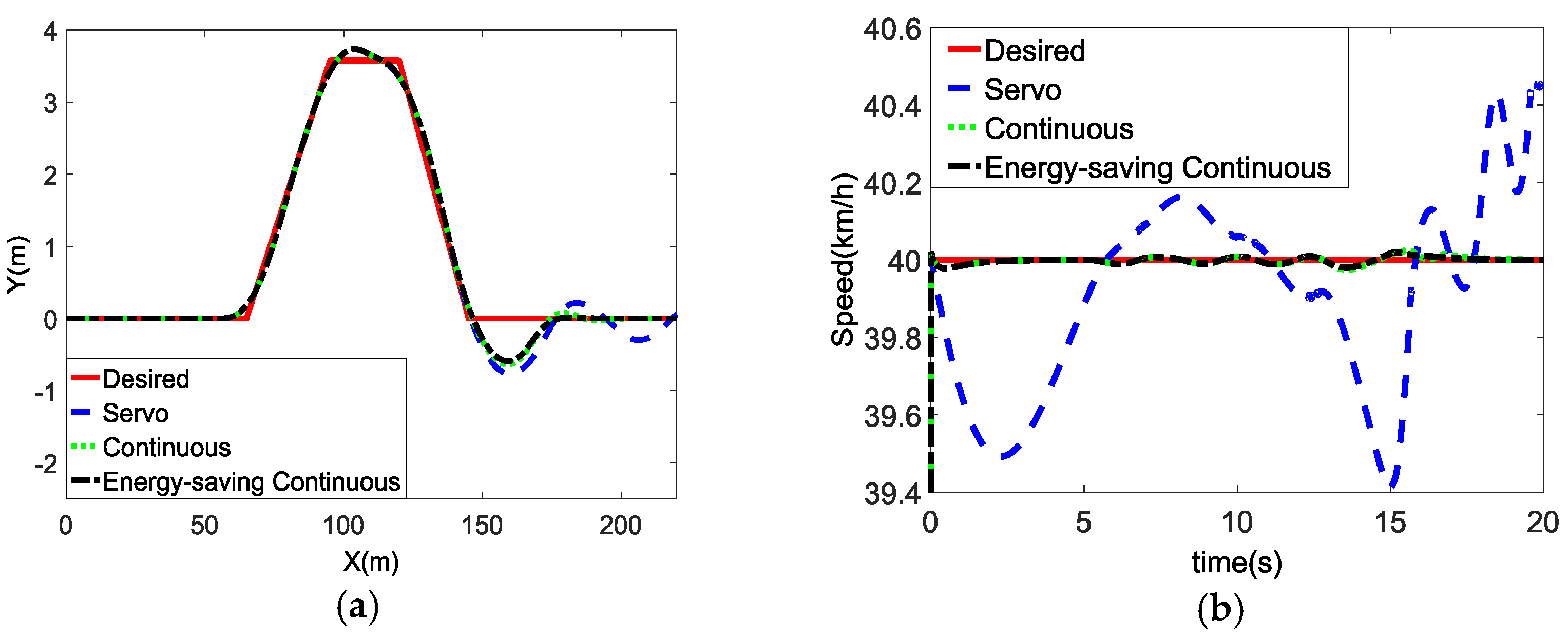
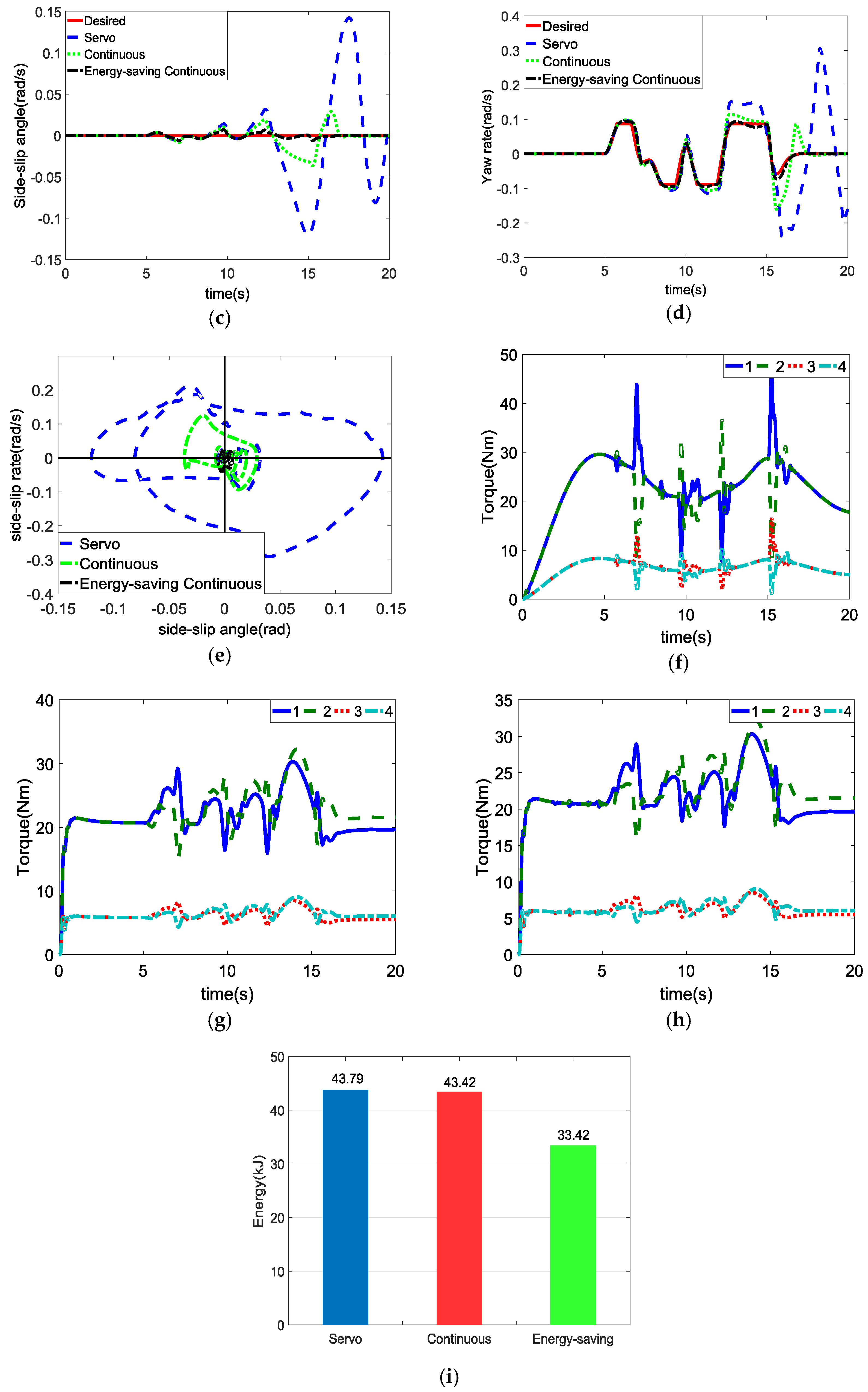
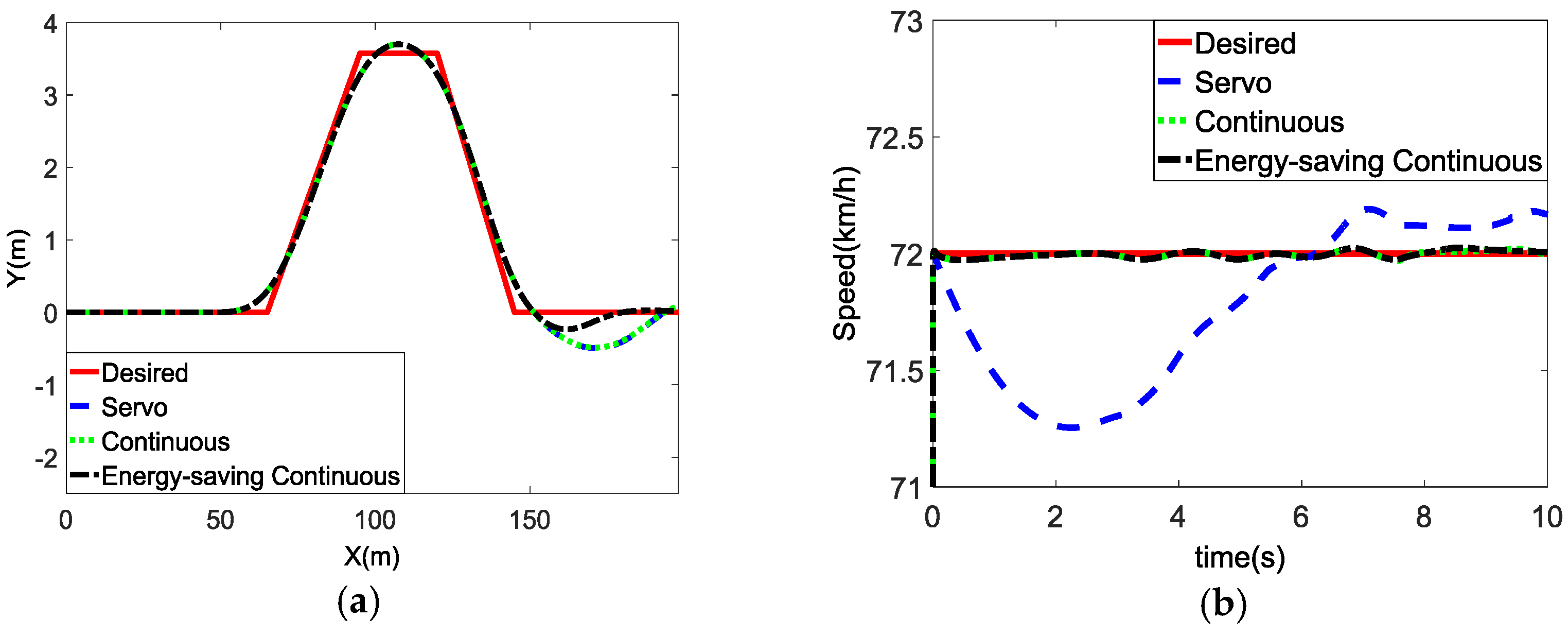
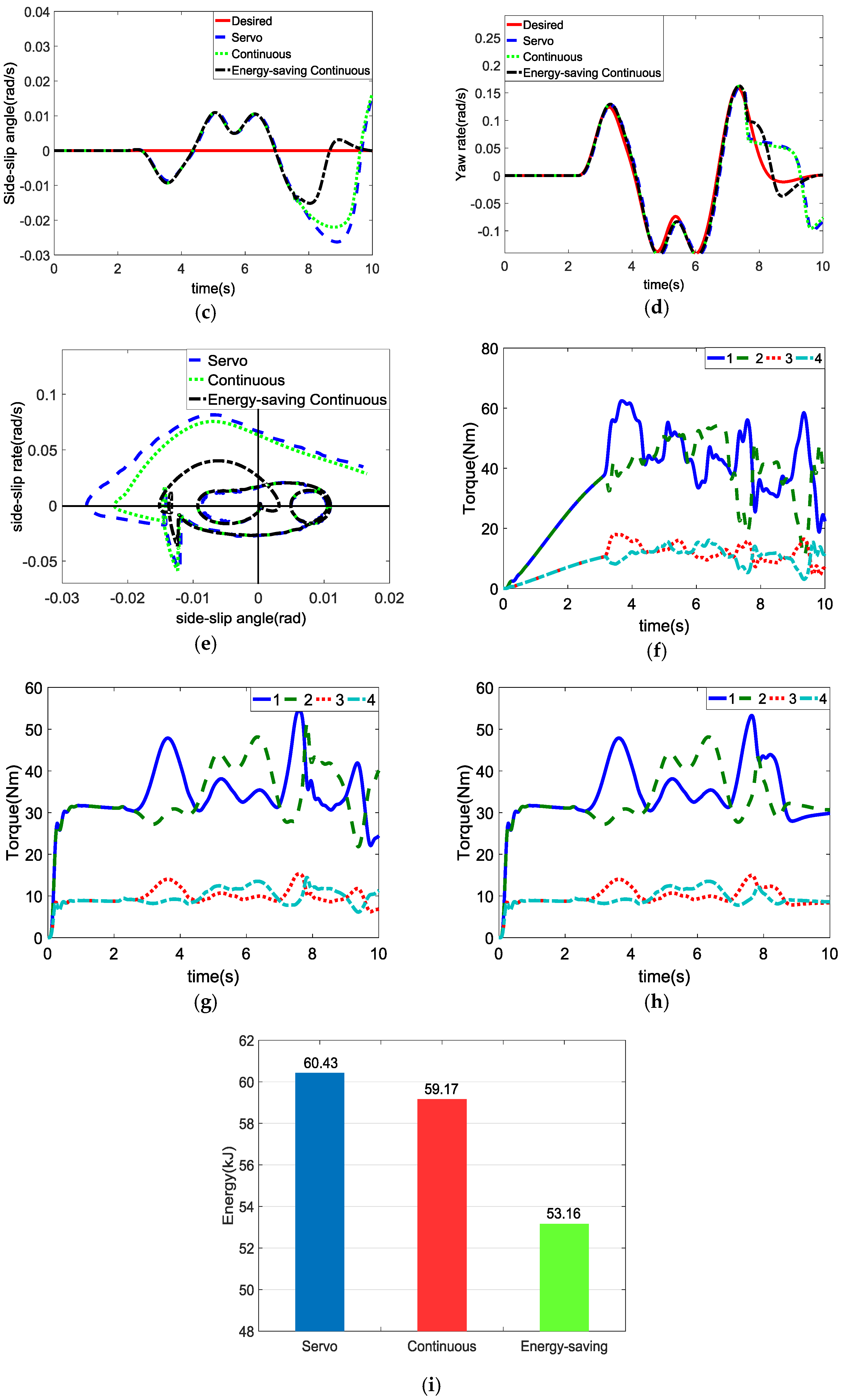
3.2. DLC Maneuver
3.2.1. Slippery Road: μ = 0.1
3.2.2. Joint Road: μ = 0.75–0.1
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, M.; Gu, F.; Zhang, Y. Ride Comfort Optimization of In-Wheel-Motor Electric Vehicles with In-Wheel Vibration Absorbers. Energies 2017, 10, 1647. [Google Scholar] [CrossRef]
- Zhang, X.; Göhlich, D. Integrated Traction Control Strategy for Distributed Drive Electric Vehicles with Improvement of Economy and Longitudinal Driving Stability. Energies 2017, 10, 126. [Google Scholar] [CrossRef]
- Zhai, L.; Huang, H.; Kavuma, S. Investigation on a Power Coupling Steering System for Dual-Motor Drive Tracked Vehicles Based on Speed Control. Energies 2017, 10, 1118. [Google Scholar] [CrossRef]
- Zhai, L.; Sun, T.; Wang, J. Electronic Stability Control Based on Motor Driving and Braking Torque Distribution for a Four In-Wheel Motor Drive Electric Vehicle. IEEE Trans. Veh. Technol. 2016, 65, 4726–4739. [Google Scholar] [CrossRef]
- Ono, E.; Hattori, Y.; Muragishi, Y.; Koibuchi, K. Vehicle dynamics integrated control for four-wheel-distributed steering and four-wheel-distributed traction/braking systems. Veh. Syst. Dyn. 2006, 44, 139–151. [Google Scholar] [CrossRef]
- Xu, D.; Wang, G.; Cao, B.; Feng, X. Study on optimizing torque distribution strategy for independent 4WD electric vehicle. J. Xian Jiaotong Univ. 2012, 68, 42–46. [Google Scholar]
- Chen, Y.; Wang, J. Design and Evaluation on Electric Differentials for Overactuated Electric Ground Vehicles with Four Independent In-Wheel Motors. IEEE Trans. Veh. Technol. 2012, 61, 1534–1542. [Google Scholar] [CrossRef]
- Wang, J.; Longoria, R.G. Coordinated and Reconfigurable Vehicle Dynamics Control. IEEE Trans. Control Syst. Technol. 2009, 17, 723–732. [Google Scholar] [CrossRef]
- Zhao, H.; Ren, B.; Chen, H.; Deng, W. Model predictive control allocation for stability improvement of four-wheel drive electric vehicles in critical driving condition. IET Control Theory Appl. 2015, 9, 2688–2696. [Google Scholar] [CrossRef]
- Song, P.; Tomizuka, M.; Zong, C. A novel integrated chassis controller for full drive-by-wire vehicles. Veh. Syst. Dyn. 2015, 53, 215–236. [Google Scholar] [CrossRef]
- Li, B.; Goodarzi, A.; Khajepour, A.; Chen, S.K.; Litkouhi, B. An optimal torque distribution control strategy for four-independent wheel drive electric vehicles. Veh. Syst. Dyn. 2015, 53, 1172–1189. [Google Scholar] [CrossRef]
- He, P.; Hori, Y. Optimum traction force distribution for stability improvement of 4WD EV in critical driving condition. In Proceedings of the IEEE International Workshop on Advanced Motion Control, Istanbul, Turkey, 27–29 March 2006; pp. 596–601. [Google Scholar]
- Novellis, L.D.; Sorniotti, A.; Gruber, P.; Orus, J.; Fortun, J.M.R.; Theunissen, J.; Smet, J.D. Direct yaw moment control actuated through electric drivetrains and friction brakes: Theoretical design and experimental assessment. Mechatronics 2015, 26, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Nam, K.; Fujimoto, H.; Hori, Y. Lateral Stability Control of In-Wheel-Motor-Driven Electric Vehicles Based on Sideslip Angle Estimation Using Lateral Tire Force Sensors. IEEE Trans. Veh. Technol. 2012, 61, 1972–1985. [Google Scholar]
- Zhang, H.; Wang, J. Vehicle Lateral Dynamics Control through AFS/DYC and Robust Gain-Scheduling Approach. IEEE Trans. Veh. Technol. 2016, 65, 489–494. [Google Scholar] [CrossRef]
- Zhang, L. Vehicle Stability Enhancement through Hierarchical Control for a Four-Wheel-Independently-Actuated Electric Vehicle. Energies 2017, 10, 947. [Google Scholar]
- Hu, J.S.; Wang, Y.; Fujimoto, H.; Hori, Y. Robust Yaw Stability Control for In-wheel Motor Electric Vehicles. IEEE/ASME Trans. Mechatron. 2017, 22, 1360–1370. [Google Scholar] [CrossRef]
- Ding, S.; Liu, L.; Zheng, W. Sliding Mode Direct Yaw-Moment Control Design for In-Wheel Electric Vehicles. IEEE Trans. Ind. Electron. 2017, 64, 6752–6762. [Google Scholar] [CrossRef]
- Kang, J.; Yoo, J.; Yi, K. Driving Control Algorithm for Maneuverability, Lateral Stability, and Rollover Prevention of 4WD Electric Vehicles with Independently Driven Front and Rear Wheels. IEEE Trans. Veh. Technol. 2011, 60, 2987–3001. [Google Scholar] [CrossRef]
- Li, B.; Du, H.; Li, W. Optimal Distribution Control of Non-Linear Tire Force of Electric Vehicles with In-Wheel Motors. Asian J. Control 2016, 18, 69–88. [Google Scholar] [CrossRef]
- Kim, W.; Son, Y.S.; Chung, C.C. Torque-Overlay-Based Robust Steering Wheel Angle Control of Electrical Power Steering for a Lane-Keeping System of Automated Vehicles. IEEE Trans. Veh. Technol. 2016, 65, 4379–4392. [Google Scholar] [CrossRef]
- Yamakawa, J.; Kojima, A.; Watanabe, K. A method of torque control for independent wheel drive vehicles on rough terrain. J. Terramech. 2007, 44, 371–381. [Google Scholar] [CrossRef]
- Jin, L.Q.; Liu, Y. Study on Adaptive Slid Mode Controller for Improving Handling Stability of Motorized Electric Vehicles. Math. Probl. Eng. 2014, 2014, 240857. [Google Scholar] [CrossRef]
- Kim, D.; Kim, H. Vehicle Stability Control with Regenerative Braking and Electronic Brake Force Distribution for a Four-Wheel Drive Hybrid Electric Vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2006, 220, 683–693. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, M.; Zhou, Y. Estimation of Longitudinal Speed of In-wheel Motor Driven Vehicle Using Fuzzy Extended Kalman Filter. J. Southwest Jiaotong Univ. 2015, 6, 1094–1099. [Google Scholar] [CrossRef]
- Zhang, H.; Li, X.; Shi, S.; Liu, H.; Guan, R.; Liu, L. Phase Plane Analysis for Vehicle Handling and Stability. Int. J. Comput. Intell. Syst. 2011, 4, 1179–1186. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Δkp | e(s) | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | Z | PS | PM | PB | ||
| Δe(s) | NB | PB | PB | PM | PM | PS | NS | NS |
| NM | PB | PB | PM | PM | PS | NS | NS | |
| NS | PB | PB | PM | PS | NS | NM | NM | |
| Z | PB | PB | PM | Z | NS | NM | NB | |
| PS | PM | PM | PS | NS | NM | NB | NB | |
| PM | PS | PS | NS | NM | NM | NB | NB | |
| PB | PS | PS | NS | NM | NM | NB | NB | |
| Δki | e(s) | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | Z | PS | PM | PB | ||
| Δe(s) | NB | NB | NB | NM | NM | NM | Z | Z |
| NM | NB | NM | NM | NM | NS | Z | Z | |
| NS | NM | NM | NS | NS | Z | PS | PS | |
| Z | NM | NS | NS | Z | PS | PS | PM | |
| PS | NS | NS | Z | PS | PS | PM | PM | |
| PM | Z | Z | PS | PM | PM | PB | PB | |
| PB | NB | NB | NM | NM | NM | Z | Z | |
| Δkd | e(s) | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | Z | PS | PM | PB | ||
| Δe(s) | NB | PS | PS | Z | Z | Z | PS | PB |
| NM | NB | NB | NM | NS | PM | PB | PM | |
| NS | NB | NB | NM | NS | PS | PS | PM | |
| Z | NS | NS | NS | NS | Z | PS | PB | |
| PS | NB | NB | NM | NS | PS | PB | PB | |
| PM | NB | NB | NM | NS | PM | PB | PB | |
| PB | PS | PS | Z | Z | Z | PS | PS | |
| Name | Symbol | Value |
|---|---|---|
| vehicle mass | m | 1411 kg |
| length from the center of gravity (CG) to the front wheel axis | a | 1.04 m |
| length from the CG to the rear wheel axis | b | 1.56 m |
| tread width | d | 1.48 m |
| tire radius | r | 0.3 m |
| height of the center of mass | hg | 0.54 m |
| moment of inertia about the yaw axis | Iz | 2031.4 kgm3 |
| rated power | Pe | 14 kW |
| maximum power | Pm | 28 kW |
| rated speed | ne | 800 rpm |
| maximum speed | nm | 1200 rpm |
| rated torque | Te | 170 Nm |
| maximum torque | Tm | 340 Nm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhai, L.; Hou, R.; Sun, T.; Kavuma, S. Continuous Steering Stability Control Based on an Energy-Saving Torque Distribution Algorithm for a Four in-Wheel-Motor Independent-Drive Electric Vehicle. Energies 2018, 11, 350. https://doi.org/10.3390/en11020350
Zhai L, Hou R, Sun T, Kavuma S. Continuous Steering Stability Control Based on an Energy-Saving Torque Distribution Algorithm for a Four in-Wheel-Motor Independent-Drive Electric Vehicle. Energies. 2018; 11(2):350. https://doi.org/10.3390/en11020350
Chicago/Turabian StyleZhai, Li, Rufei Hou, Tianmin Sun, and Steven Kavuma. 2018. "Continuous Steering Stability Control Based on an Energy-Saving Torque Distribution Algorithm for a Four in-Wheel-Motor Independent-Drive Electric Vehicle" Energies 11, no. 2: 350. https://doi.org/10.3390/en11020350
APA StyleZhai, L., Hou, R., Sun, T., & Kavuma, S. (2018). Continuous Steering Stability Control Based on an Energy-Saving Torque Distribution Algorithm for a Four in-Wheel-Motor Independent-Drive Electric Vehicle. Energies, 11(2), 350. https://doi.org/10.3390/en11020350