Modelling the Effect of Driving Events on Electrical Vehicle Energy Consumption Using Inertial Sensors in Smartphones

 , , and
, , and
Abstract
:1. Introduction
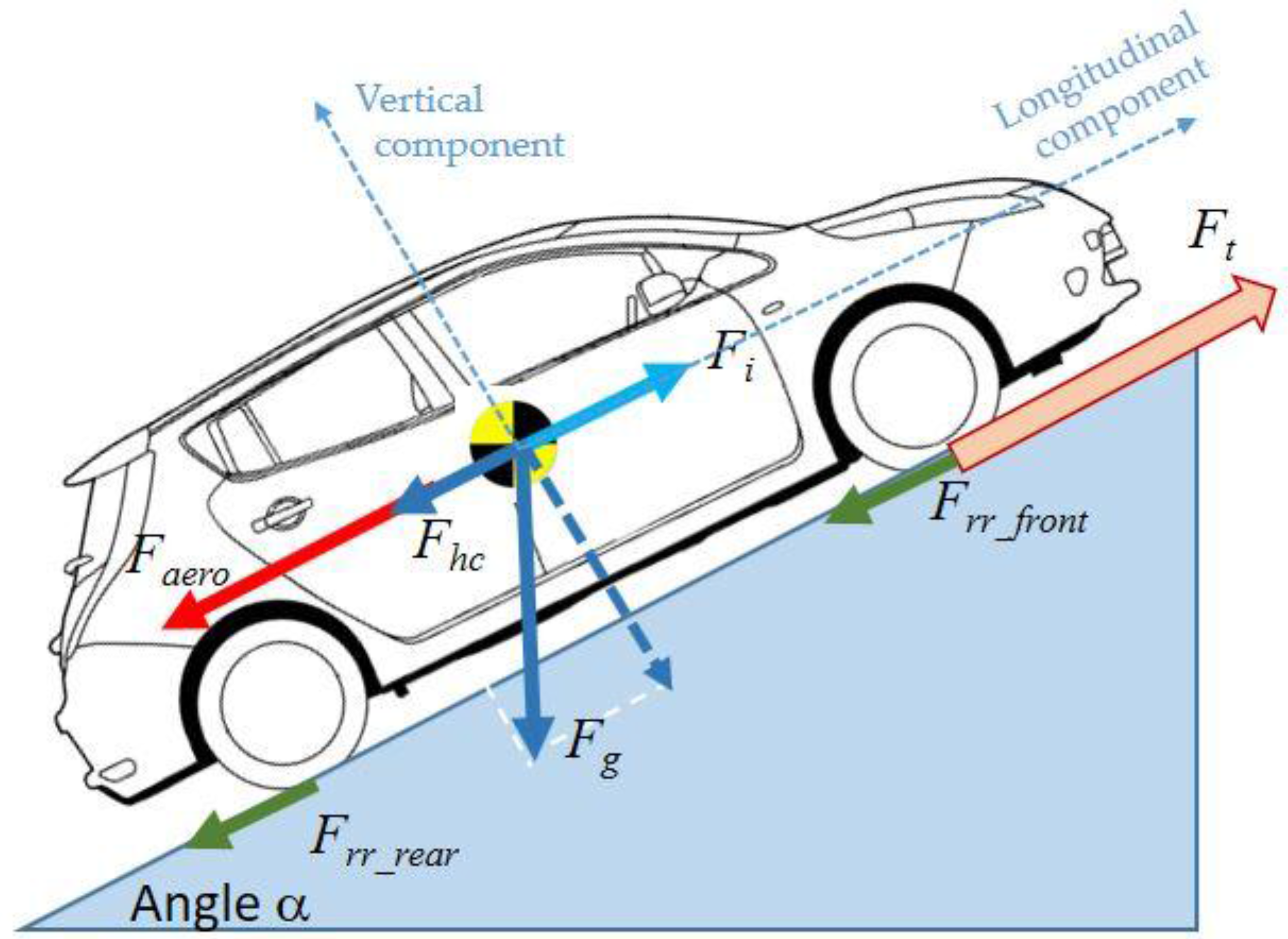
2. Electric Vehicle Consumption Model
Model Extension to Include Significant Driving Events
3. Data Acquisition, Detection, Classification and Validation
3.1. Data Acquisition and Preprocessing
3.2. Events Detection
3.3. Events Classification
3.4. Events Validation
- “Date/Time”
- “Latitude and Longitude” in the following format: dd mm.yyyy
- “Elv” Elevation in meters.
- “Speed” in the km/h.
- “Gids”, which indicates the energy in the Nissan Leaf battery (current capacity = 80 Wh.Gids)
- “SoC” State of Charge (SoC) of the Traction Battery.
- AHr” Capacity of the Traction Battery.
- “Pack Volts” Traction Battery voltage
- “Pack Amps” Traction Battery amperage, which is positive when the current is extracted from battery (during driving), or negative when Regen or charging.
- “Odo (km)” Odometer reading in kilometers.
- “SOH” The State of Health of the Battery in percent.
- “epoch time”, where one sample represents the time in seconds from 1 January 1970.
- “Motor Pwr (100 w)” Drive motor power.
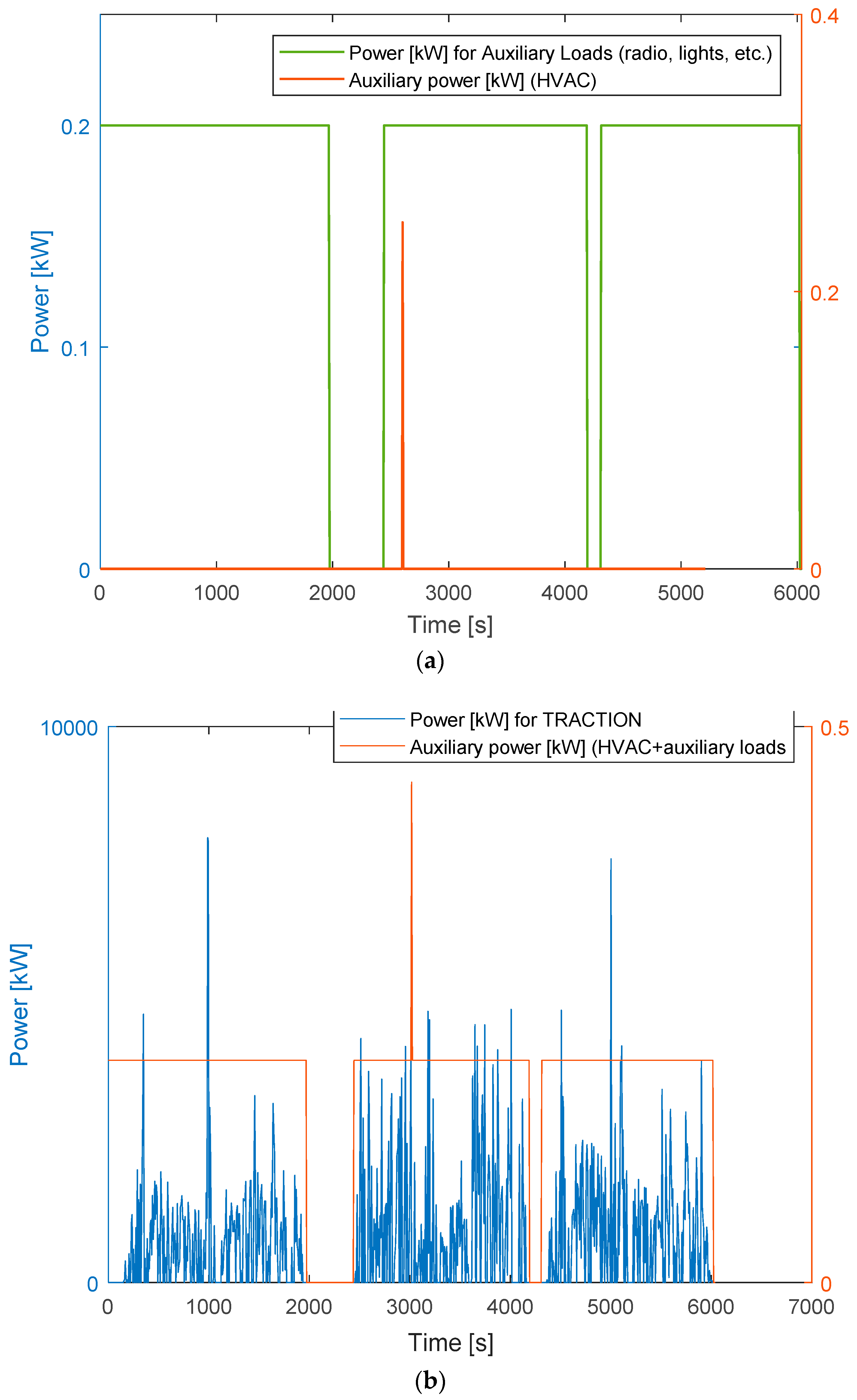
- “Aux Pwr (100 w)” Power used by the auxiliary equipment (Lights, Radio, Navigation system, rear defroster…).
- ”A/C Pwr (250 w)” Power used by the Air Conditioning System power.
- “Gear” “7” Gear position (0 = not read yet; 1 = Park; 2 = Reverse; 3 = Neutral; 4 = Drive; 7 = B/Eco)
4. Results
4.1. Initial Model Validation
4.2. Real Trip Validation
4.2.1. Cluster 1 (Smooth Ride) Representative Trip
4.2.2. Cluster 2 (Aggressive Driving) Representative Trip
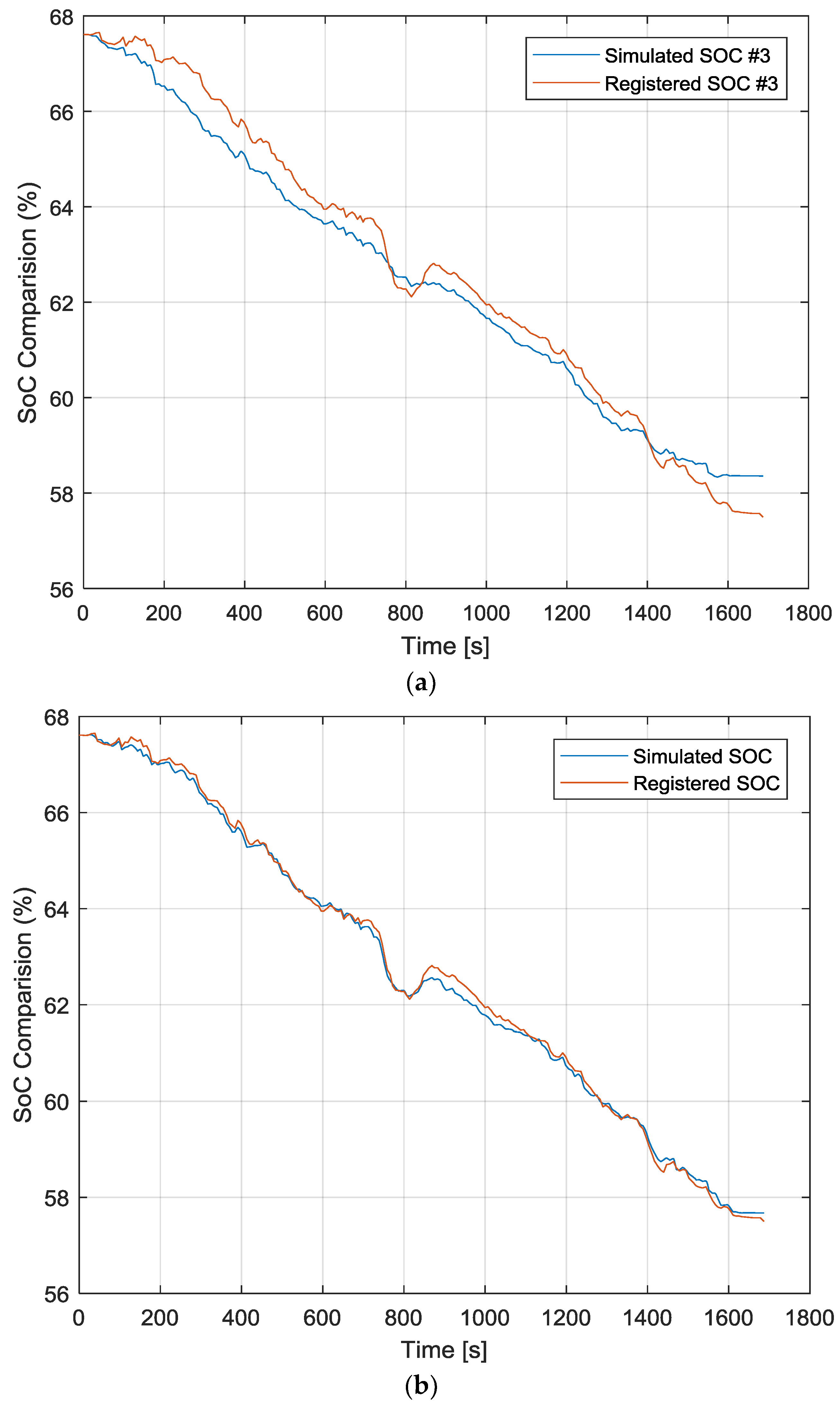
4.2.3. Cluster 3 (Mild Driving) Representative Trip
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- International Energy Agency. Global EV Outlook: Understanding the Electric Vehicle Landscape to 2020; International Energy Agency: Paris, France, 2013. [Google Scholar]
- International Energy Agency. Global EV Outlook 2017; International Energy Agency: Paris, France, 2017; Available online: https://www.iea.org/publications/freepublications/publication/GlobalEVOutlook2017.pdf (accessed on 8 February 2018).
- Drivesapp. Available online: www.driviesapp.com (accessed on 8 February 2018).
- Plötz, T.; Hammerla, N.Y.; Olivier, P. Feature learning for activity recognition in ubiquitous computing. In Proceedings of the IJCAI, International Joint Conference on Artificial Intelligence, Barcelona, Spain, 16–22 July 2011; Volume 22, pp. 1729–1734. [Google Scholar]
- Yao, S.; Hu, S.; Zhao, Y.; Zhang, A.; Abdelzaher, T. Deepsense: A unified deep learning framework for time-series mobile sensing data processing. In Proceedings of the 26th International Conference on World Wide Web, Perth, Australia, 3–7 April 2017; International World Wide Web Conferences Steering Committee: Geneva, Switzerland, 2017; pp. 351–360. [Google Scholar]
- Giannotti, F.; Nanni, M.; Pedreschi, D.; Pinelli, F.; Renso, C.; Rinzivillo, S.; Trasarti, R. Unveiling the complexity of human mobility by querying and mining massive trajectory data. VLDB J. Int. J. Very Large Data Bases 2011, 20, 695–719. [Google Scholar] [CrossRef]
- Wahlström, J.; Skog, I.; Händel, P. Driving Behavior Analysis for Smartphone-based Insurance Telematics. In Proceedings of the 2nd Workshop on Physical Analytics, Florence, Italy, 22 May 2015; ACM: New York, NY, USA, 2015; pp. 19–24. [Google Scholar]
- Phan, T. Intelligent Energy-Efficient Triggering of Geolocation Fix Acquisitions Based on Transitions between Activity Recognition States. In Mobile Computing, Applications and Services; Springer International Publishing: Basel, Switzerland, 2013; pp. 104–121. [Google Scholar]
- Oshin, T.O.; Poslad, A.; Ma, A. A method to evaluate the energy-efficiency of wide-area location determination techniques used by smartphones. In Proceedings of the IEEE 15th International Conference on Computational Science and Engineering, Nicosia, Cyprus, 5–7 December 2012; pp. 326–333. [Google Scholar]
- Dunlap, S. Persistent Location Tracking on Mobile Devices and Location Profiling. Patent US 20130085861 A1, 4 April 2013. [Google Scholar]
- Basir, O.A.; Jamali, S.H.; Miners, W.B.; Toonstra, J. Method of Correcting the Orientation of a Freely Installed Accelerometer in a Vehicle. Patent US 20130081442 A1, 4 April 2013. [Google Scholar]
- Van Ly, M.; Martin, S.; Trivedi, M.M. Driver Classification and Driving Style Recognition using Inertial Sensors. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Gold Coast, Australia, 23–26 June 2013. [Google Scholar]
- Johnson, D.A.; Trivedi, M.M. Driving Style Recognition Using a Smartphone as a Sensor Platform. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1609–1615. [Google Scholar]
- Fazeen, M.; Gozick, B.; Dantu, R.; Bhukhiya, M.; González, M.C. Safe Driving Using Mobile Phones. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1462–1468. [Google Scholar] [CrossRef]
- Pozo, R.F.; Gomez, L.A.H.; Meco, D.L.; Vercher, J.B.; Muñoz, V.M.G. Method for Detecting Driving Events of a Vehicle Based on a Smartphone. Patent US 20160016590 A1, 21 January 2016. [Google Scholar]
- Alvarez, A.D.; Garcia, F.S.; Naranjo, J.E.; Anaya, J.J.; Jimenez, F. Modeling the driving behavior of electric vehicles using smartphones and neural networks. IEEE Intell. Transp. Syst. Mag. 2014, 6, 44–53. [Google Scholar] [CrossRef]
- Meseguer, J.E.; Toh, C.K.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Driving styles: A mobile platform for driving styles and fuel consumption characterization. J. Commun. Netw. 2017, 19, 162–168. [Google Scholar] [CrossRef]
- Larminie, J.; Lowry, J. Electric Vehicle Technology Explained, 2nd ed.; John Wiley & Sons: Chichester, UK, 2012; ISBN 978-1-119-94273-3. [Google Scholar]
- Ehsani, M.; Gao, Y.; Gay, S.E.; Emadi, A. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles: Fundamentals, Theory, and Design, 2nd ed.; CRC Press LLC: Boca Raton, FL, USA, 2016. [Google Scholar]
- Schaltz, E. Electric Vehicles—Modelling and Simulations. In Electric Vehicles-Modelling and Simulations; Soylu, S., Ed.; InTech: London, UK, 2011; p. 487. ISBN 978-953-307-477-1. [Google Scholar] [CrossRef]
- Asamer, J.; Graser, A.; Heilmann, B.; Ruthmair, M. Sensitivity analysis for energy demand estimation of electric vehicles. Transp. Res. Part D Transp. Environ. 2016, 46, 182–199. [Google Scholar] [CrossRef]
- Genikomsakis, K.N.; Mitrentsis, G. A computationally efficient simulation model for estimating energy consumption of electric vehicles in the context of route planning applications. Transp. Res. Part D Transp. Environ. 2017, 50, 98–118. [Google Scholar] [CrossRef]
- NREL (National Renewable Energy Laboratory). FASTSim: Future Automotive Systems Technology Simulator. 2014. Available online: https://www.nrel.gov/transportation/fastsim.html (accessed on 8 February 2018).
- Fiori, C.; Ahn, K.; Rakha, H.A. Power-based electric vehicle energy consumption model: Model development and validation. Appl. Energy 2016, 168, 257–268. [Google Scholar] [CrossRef]
- Alves, J.; Baptista, P.C.; Gonçalves, G.A.; Duarte, G.O. Indirect methodologies to estimate energy use in vehicles: Application to battery electric vehicles. Energy Convers. Manag. 2016, 124, 116–129. [Google Scholar] [CrossRef]
- Zhang, R.; Yao, E. Electric vehicles’ energy consumption estimation with real driving condition data. Transp. Res. Part D Transp. Environ. 2015, 41, 177–187. [Google Scholar] [CrossRef]
- Lee, C.-H.; Wu, C.-H. A Novel Big Data Modeling Method for Improving Driving Range Estimation of EVs. IEEE Access 2015, 3, 1980–1993. [Google Scholar] [CrossRef]
- Available online: https://www.nissanusa.com/electric-cars/leaf/versions-specs/ (accessed on 8 February 2018).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value |
|---|---|---|
| Cross sectional area (m2) | A | 2.3316 |
| Curb weight (kg) | Mcar | 1521 |
| Driver and passengers’ weight (kg) | Mp | 160 (1 driv. + 1 pass.)–230 (1 drv. + 2 pass.) |
| Nominal battery capacity (kWh) | Cnom | 30 |
| Driveline efficiency (%) | ηgear | 0.95 |
| Controller and motor efficiency (%) | ηmotor | 0.98 |
| Battery efficiency (%) | ηvat | 0.98 |
| Auxiliary power load (kW) | Paux | 0.2 |
| Description | Value |
|---|---|
| Drivers | 68 |
| Routes | 22,194 |
| Total maneuvers | 16,029 |
| Total left turn maneuvers | 4649 |
| Total right turn maneuvers | 4907 |
| Total braking maneuvers | 3498 |
| Total acceleration maneuvers | 2975 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiménez, D.; Hernández, S.; Fraile-Ardanuy, J.; Serrano, J.; Fernández, R.; Álvarez, F. Modelling the Effect of Driving Events on Electrical Vehicle Energy Consumption Using Inertial Sensors in Smartphones. Energies 2018, 11, 412. https://doi.org/10.3390/en11020412
Jiménez D, Hernández S, Fraile-Ardanuy J, Serrano J, Fernández R, Álvarez F. Modelling the Effect of Driving Events on Electrical Vehicle Energy Consumption Using Inertial Sensors in Smartphones. Energies. 2018; 11(2):412. https://doi.org/10.3390/en11020412
Chicago/Turabian StyleJiménez, David, Sara Hernández, Jesús Fraile-Ardanuy, Javier Serrano, Rubén Fernández, and Federico Álvarez. 2018. "Modelling the Effect of Driving Events on Electrical Vehicle Energy Consumption Using Inertial Sensors in Smartphones" Energies 11, no. 2: 412. https://doi.org/10.3390/en11020412