1. Introduction
Modern industrial processes (e.g., power plants, and chemical and manufacturing processes) are becoming larger and more complex owing to efforts to fulfill safety and environmental regulations, to save costs, and to maximize profits. Therefore, process monitoring for accurate and timely detection and isolation of potential faults is more important than ever before. Faults are defined as abnormal events that occur during process operations. In thermal power plants (TPPs), main generating units (e.g., steam boilers and turbines) operate under very high pressure and temperature; if possible faults of the main units are not detected and isolated precisely, they may result in system failures, and eventually may cause significant losses of life and property. Properly designed monitoring systems can ensure safe, effective, and economical operations of target processes.
Statistical process monitoring techniques fall into two categories: model-based and data-based methods. In the model-based methods, process monitoring is carried out by rigorous mathematical models derived from prior physical and/or chemical knowledge (e.g., mass or energy balances) governing target processes; the monitoring performance may be degraded when the derived models are inaccurate. If target processes are heavily complex and large-scale, the derivation of the models is difficult, or may be impossible; even when possible, it is costly and takes much time. Despite their development efforts (e.g., mathematical derivations and proofs), they may be limited by boundary conditions for specific system behaviors or only applicable for particular system setups [
1]. In the data-driven techniques, monitoring models are developed based on historical operation data. Recent advances in communications and measurement technologies facilitate the installation of huge numbers of sensors in target processes; various key variables related to process monitoring and control are measured by the installed sensors. Distributed control systems and/or supervisory control and data acquisition systems built into modern industrial processes enable efficient management and storage of the massive amounts of operational data. Without mathematical models based on the first-principles, the data-driven methods are capable of extracting useful health information from abundant operation data; they are receiving a great deal of attention from academia and industries.
Process monitoring is carried out via the following four steps [
2]: fault detection, fault isolation, fault diagnosis, and process recovery. Fault detection determines whether possible faults have occurred; early detection helps operators and maintenance personnel take corrective actions to prevent developing abnormal events from leading to serious process upsets. Fault isolation (also called fault identification) locates faulty variables closely related to detected faults; the isolation results assist field experts in diagnosing the faults precisely, i.e., it helps the system operators to determine which parts should be repaired or replaced [
3]. Fault diagnosis investigates the root causes and/or sources of occurring faults. Process recovery corresponds to the last step in finishing the process monitoring loop; in this step, the effects of abnormal events are removed and target processes get back to normal operating conditions.
So far, multivariate statistical techniques and machine learning have been widely used for fault detection and diagnosis of power plant equipment, such as principal component analysis (PCA) [
4,
5,
6,
7], independent component analysis (ICA) [
8,
9], auto-associative kernel regression (AAKR) [
10,
11], artificial neural networks [
12,
13], fuzzy models [
14,
15], support vector machine [
15,
16], neuro-fuzzy networks [
17], and group method of data handling [
18]. PCA and ICA can handle multivariate process data effectively via dimensionality reduction. AAKR is a nonparametric multivariate technique to obtain predicted vectors for new query vectors by updating local models in real time; it can perform fault detection tasks without any assumptions for target data properties (e.g., linear or nonlinear). In the case of machine learning techniques for black box modeling, considering nonlinearities of target processes, fault detection and diagnosis can be carried out without the need of physical or chemical knowledge. Although these methods can detect potential faults successfully, they may have several difficulties in isolating and diagnosing the faults.
As explained above, after the fault detection tasks, fault isolation and diagnosis should be conducted to pinpoint the root causes of occurring faults. If there exist abundant historical faulty samples whose class labels are associated with all possible fault categories, multi-class classifiers [
19,
20,
21,
22] can be explicitly constructed. The designed classifiers assign the most similar fault categories to query samples; faults are diagnosed without the fault isolation procedure. When designing such classifiers, one might face the following difficulties. First, in general, the number of available faulty samples is much fewer than that of normal samples. Actual industrial processes are carefully designed to prevent abnormal events; the processes are equipped with closed-loop controllers compensating for the effects of unpermitted changes and disturbances. In addition, to build multi-class classification models, preparing complete training dataset encompassing all types of faults is nearly impossible; if all possible faults occurred several times in the past and the corresponding fault dataset was stored in a database, or if there are useful simulators that can emulate target processes as perfectly as possible, collecting the complete dataset may be possible. Second, collected training dataset for classifier learning is usually class-imbalanced [
23]; the number of faulty samples may vary from class to class considerably. Furthermore, high levels of expert experience and knowledge are required to assign proper class labels to historical faulty samples; these labeling procedures may also be time-consuming. Lastly, classifiers based only on historical fault data do not function adequately when new types of faults develop.
When the faulty data samples encompassing all possible fault types are not enough, after isolating faulty variables based on detection indices from fault detection models, the isolation results can be used for fault diagnosis. In the fault detection models, normal samples are only needed for training, and whether target processes fall outside normal operating regions is decided in real time; if detection indices for query samples deviate from predefined threshold values, fault occurrence is declared, and alarm signals are generated. After faults are detected, fault isolation should be performed to determine which variables are responsible for the detected faults. Contribution plots [
24,
25] are the most popular method for fault isolation; it is assumed that the contribution values of faulty variables to detection indices are higher than those of non-faulty ones. In this method, monitored variables are identified as faulty variables if their contribution values violate the confidence limits. Although the contribution analysis can identify faulty variables quickly and easily without a historical fault dataset and prior information on possible fault types, it has several limitations, as follows: first, the threshold values derived only from normal data may be unsuitable for isolating faulty variables, because contribution values of each variable within in-control regions may follow different distributions from those outside the regions. Second, it is well-known that isolation results from contribution plots confuse process operators and engineers due to the smearing effect [
26,
27,
28]; smearing is a phenomenon that contribution values of non-faulty variables are enlarged by faulty variables. When complicated faults, rather than simple faults, have happened, fault isolation with contribution analysis may lead to an ambiguous diagnosis.
In this paper, we propose a fault isolation method via classification and regression tree (CART)-based variable ranking for a drum-type steam boiler in TPP; it is assumed that some proper fault detection algorithms were already designed, and after possible faults are detected by the algorithms, the proposed fault isolation method is triggered. CART algorithm [
29] with a divide-and-conquer mechanism, splits the entire input space repeatedly and builds binary trees. CART has been successfully applied to various fields [
30,
31,
32,
33] for which data mining techniques are necessary, since it can tackle multivariate data efficiently, and the constructed trees are transparent. In the proposed method, after designing classification trees by applying CART algorithm to training dataset composed of normal and faulty samples, variable ranking is performed by extracting importance values of each input variable from the trees. In the training dataset,
Normal and
Abnormal class labels are assigned to the normal and faulty samples, respectively; the faulty samples are relevant to the regions where the detection indices are larger than or equal to threshold values. In this paper, as will be explained in
Section 3, we propose two approaches (see
Figure 1) for fault isolation; the goal of the first approach is to locate faulty variables in entire fault regions, and the second approach (with time window sliding) aims to monitor how occurring faults propagate and evolve.
The proposed method, based on the nonparametric CART algorithm, can be applicable to fault isolation of nonlinear processes; the method can locate faulty variables even when normal and faulty samples cannot be linearly separated from each other. Above all, the proposed isolation method does not suffer from the smearing effect, since it is based on CART algorithm defining decision boundaries only in the original input space. To verify the performance, the proposed method and comparison methods are applied to two benchmark problems and a 250 MW drum-type steam boiler. Experimental results show that the proposed method can effectively identify faulty variables without suffering from fault smearing, and can properly tackle nonlinearities of target processes.
The remainder of this paper is organized as follows:
Section 2 explains CART-based tree growing, pruning, and variable ranking.
Section 3 describes the proposed isolation method via the variable ranking.
Section 4 presents the experimental results and discussion, and finally, we give our conclusions in
Section 5.
3. CART-Based Fault Isolation
This section provides the proposed fault isolation method via CART-based variable ranking as explained in
Section 2.3. The purpose of fault isolation is to identify which monitored variables are closely related to occurring faults, and then to support process operators and engineers in deciding on correct fault types. In this paper, two kinds of approaches are employed for fault isolation. In the first approach, we check how much each variable contributes to the occurring faults in the entire fault region. In the second approach, time window sliding is used to track how the faults evolve and propagate over time. The first approach is suited to offline analysis of process anomalies; the second approach aids in understanding fault evolution and propagation mechanisms online.
Figure 1a,b describe the proposed first and second fault isolation approaches, respectively.
From now on, let us take a close look at the first approach (see
Figure 1a). In Step 1, we prepare normal data matrix
Xnormal composed of normal samples
, …,
, and fault data matrix
Xfault composed of fault samples
,…,
. The normal samples may correspond to training samples used to build fault detection models such as PCA and ICA; the fault samples are brought from a fault region where alarm signals are consistently generated. And then, training matrix
X for tree construction is organized by augmenting
Xnormal and
Xfault; class labels (
Normal or
Abnormal) are assigned to the last column in
X, based on whether input vectors are normal or faulty. Finally, after building a classification tree based on
X, the importance values of each variable are calculated, as explained in
Section 2.3. In Step 3, after constructing a large tree with many terminal nodes, a sequence of subtrees is obtained through the minimal cost-complexity pruning; then, the optimal tree is selected by cross-validation, and the importance values are computed by Equation (8). The input variables with high importance values are dominant to separate normal and faulty samples in the original input space; they have great explanatory powers when classifying normal and faulty samples. The importance values of non-faulty variables are small, because their behaviors are similar in both normal and fault regions. On the other hand, faulty variables have high importance values, since their patterns are significantly different in the two regions. In summary, the first approach identifies the input variables with high importance values as faulty variables in the entire fault region. This approach cannot confirm how faults evolve and propagate from start time
to end time
.
In the second approach in
Figure 1b, calculations of the importance values are repeated by sliding time window with size
w along the time axis, i.e., from
to
. The matrix
Xfault, composed of
w fault samples, changes every moment; except for this, the remaining procedures are same as those of the first approach. For example, at time
t =
+
w − 1,
Xfault consists of faulty samples
, …,
, and at time
t =
+
w,
Xfault consists of faulty samples
, …,
, and so on. Whenever
Xfault changes, a new tree should be constructed and variable importance values are extracted from the newly constructed tree; computation time in this approach is longer than the first approach because many final trees are constructed. In this case, to save time, the pruning process may be skipped; the importance values before and after the process may not be considerably different. The importance values obtained through the window sliding from time
t =
+
w − 1 to
t =
enable proper monitoring of fault evolution and propagation effects. From now on, for convenience of explanation, the two approaches presented in
Figure 1a,b are referred to as
Method 1 and
Method 2, respectively.
4. Experimental Results and Discussion
In this section, to verify the performance, the proposed method (i.e.,
Method 1 and
Method 2) is applied to two benchmark problems (i.e., a simple linear process and a three variable nonlinear process), and 250 MW drum-type steam boiler. In the first and third problems, contribution plots based on PCA and AAKR are employed as comparison methods; in the nonlinear process, since PCA cannot detect bias and drift faults accurately, it is excluded. Before applying fault detection and isolation methods, each monitored variable is normalized to zero mean and unit variance. In PCA, to reduce dimensions in principal component (PC) subspace, PCs capturing more than 85 percent of variations are only retained; contribution analysis for detection indices (i.e.,
T2 and
Q statistics) is performed for fault isolation; kernel density estimation (KDE) [
35] is employed to define threshold values for fault detection and contribution analysis. In the case of AAKR [
11], squared prediction error (SPE) is used as a detection index, and contribution values of monitored variables for SPE are also calculated; in common with PCA, thresholds for fault detection and contribution analysis are determined by KDE. In both PCA and AAKR, level of significance
α is set to 0.01. To construct CART classifiers and to extract variable importance values from the classifiers, we employee the ‘fitctree’ and ‘predictorImportance’ MATLAB functions built into the Statistics and Machine Learning Toolbox; the ‘ksdensity’ function in the same toolbox is used to estimate cumulative distribution functions of detection indices and contribution values via KDE.
Method 1 uses the impurity function in Equation (1) to measure node impurities. To take into account imbalance between normal and abnormal classes, Method 2 employs Equation (2) instead of Equation (1). In the case of Method 2, there are much more samples with
Normal class labels than those with
Abnormal in the training matrix
X (see
Figure 1) for CART classifiers. In Equation (2),
c(1|2) and
c(2|1) denote misclassification costs associated with classifying an abnormal sample into a normal sample and vice versa; for example,
c(1|2) and
c(2|1) can be set to 10 and 1, respectively. In Method 2, the size of time window
w is set to 10.
4.1. Simple Linear Process
First, let us describe the results of applying the proposed and comparison methods to the simple linear process, also used in [
28]. Simulation data is obtained from the following multivariate linear system:
where
x1, …,
x6 are directly measurable variables,
s1, …,
s3 are source variables that follow normal distributions with mean of 0 and variances of 1, 0.8, and 0.6, respectively, and
e is white noise with mean of 0 and variance of 0.04. From Equation (9), the six monitored variables are calculated through the linear combination of three source variables. To train PCA and AAKR, 3000 samples are generated; these samples are also used to form the normal data matrix
Xnormal in
Figure 1. Faulty samples are obtained through the addition of the term
ξf(
t), reflecting the effects of anomalies, into normal samples
x*(
t) as follows:
where the normal sample
x*(
t) at time
t is corrupted by
ξf(
t), and
ξ and
f(
t) denote the fault direction vector and fault magnitude, respectively. In this paper, in common with [
28], we consider two types of fault (i.e., simple and multiple faults) to verify the fault isolation performance. In the simple fault, the fault direction vector and its magnitude are set to
ξ = [0 0 0 1 0 0]
T and
f(
t) = 10
−5t2, respectively, and 1000 faulty samples are generated. The multiple fault is represented with
ξ = [1 0 1 0 0 0]
T and
f(
t) = 6 × 10
−6t2, and the corresponding 1200 faulty samples are also generated.
Figure 2 shows the fault isolation results of the comparison methods and Method 2 (see
Figure 1b) for the simple and multiple faults. In the figures related to the comparison methods, if variable contribution values at a certain time are larger than or equal to thresholds, the relevant entries display as black; otherwise, the entries are marked with white. In the figures associated with Method 2, variable importance values at a certain time are indicated through different colors; as the values are close to 100 (or 0), the colors for relevant entries are close to black (or white). The simple and multiple faults start to be detected by PCA and AAKR at about time
t = 300; the monitoring charts of PCA and AAKR for fault detection are omitted due to space constraints. As presented in
Figure 2, PCA-based contribution plots suffer terribly from smearing effect. In the simple fault, in addition to faulty variable
x4, contribution values of normal variables
x1,
x2,
x3, and
x5 deviate from confidence limits. In the multiple fault, we can confirm severe smearing over non-faulty variables
x2,
x5, and
x6. In AAKR-based contribution analysis, smearing over normal variables appears consistently, although its severity is less than PCA. In the case of Method 2, importance values of non-faulty variables are not equal to zero only in the early stages of the faults. However, faulty variables of the simple and multiple faults are clearly identified after approximately time
t = 370. Contrary to comparison methods, as the magnitude of the faults becomes larger over time, importance values of normal variables obtained by Method 2 become closer to zero.
Figure 3 shows variable importance values related to the simple and multiple faults, which are calculated by Method 1 (see
Figure 1a). For the simple fault, faulty samples from time
t = 301 to
t = 1000 constitute the fault data matrix
Xfault; for the multiple fault, the matrix
Xfault consists of faulty samples from time
t = 301 to
t = 1200. As shown in the figure, variable importance values of faulty variables are much larger than those of normal (i.e., close to 100); the values of non-faulty variables are close to zero. In other words, in this benchmark problem, Method 1 can locate faulty variables accurately in the entire fault regions.
4.2. Three Variable Nonlinear Process
Second, let us look at the results of fault isolation for the nonlinear process (also used in [
36,
37]) with three monitored variables and one latent variable described as follows:
where
x1, …,
x3 are the monitored variables,
s [0.01, 2] is the source variable, and
e1, …,
e3 follow independent Gaussian distributions with mean and variance of 0 and 0.01, respectively. We obtain 100 normal samples from Equation (11), used to build fault detection models and to form the normal data matrix
Xnormal. To validate the performance of fault isolation, two fault cases, where each case is composed of 300 test samples, are generated as follows:
Case 1: A step change of x2 by −0.4 was introduced starting from sample 101.
Case 2: x1 was linearly increased from sample 101 to 270 by adding 0.01(t − 100) to the x1 value of each sample in this range, where t is the sample number.
Figure 4 shows the fault isolation results of applying AAKR-based contribution analysis and Method 2 to the two fault cases.
AAKR-based contribution analysis starts to identify the faulty variable x2 in Case 1 at time t = 101, but its contribution values fluctuate constantly, and alarms are repeatedly generated and halted over time; contribution values of x2 do not steadily deviate from thresholds but depart from and return to normal regions again and again. Also, smearing over normal variable x3 is frequently observed. These phenomena may cause confusions to root cause analysis for uncovering the fundamental causes and/or sources of occurring faults. In Case 2, contribution values of faulty variable x1 consistently violate thresholds from about time t = 160 to 270, but smearing over non-faulty variables x2 and x3 becomes larger as the magnitude of the fault increases. With Method 2, the importance values of faulty variables in Cases 1 and 2 are very close to 100 in the fault regions. In Case 1, importance values of non-faulty variables x1 and x3 fluctuate widely over time; this is not due to smearing effect but is due to the fact that the fault magnitude is not very large. Although the fault occurred only in faulty variables, to determine decision boundaries for dividing normal and faulty samples in the original input space, non-faulty variables as well as faulty variables are needed when the fault magnitude is small. If the magnitude is large enough, it is possible to establish the boundaries using only faulty variables. In Case 2, the importance values of normal variables are slightly large when the fault magnitude is not large enough; as the magnitude becomes larger, the importance values of non-faulty variables decrease gradually.
Now, let us look more carefully into fault isolation results using Method 1.
Figure 5 depicts the results of applying Method 1 into Cases 1 and 2. In Case 1, to construct CART classifiers, faulty samples from time
t = 201 to 300 constitute the fault data matrix
Xfault in
Figure 1a; in Case 2,
Xfault is composed of faulty samples from time
t = 171 to 270. As can be seen from
Figure 5, the importance values of faulty variables are nearly 100; the values of non-faulty variables are relatively smaller than those of faulty. Examining the results for Methods 1 and 2 synthetically may greatly help field experts diagnose developing faults in target processes.
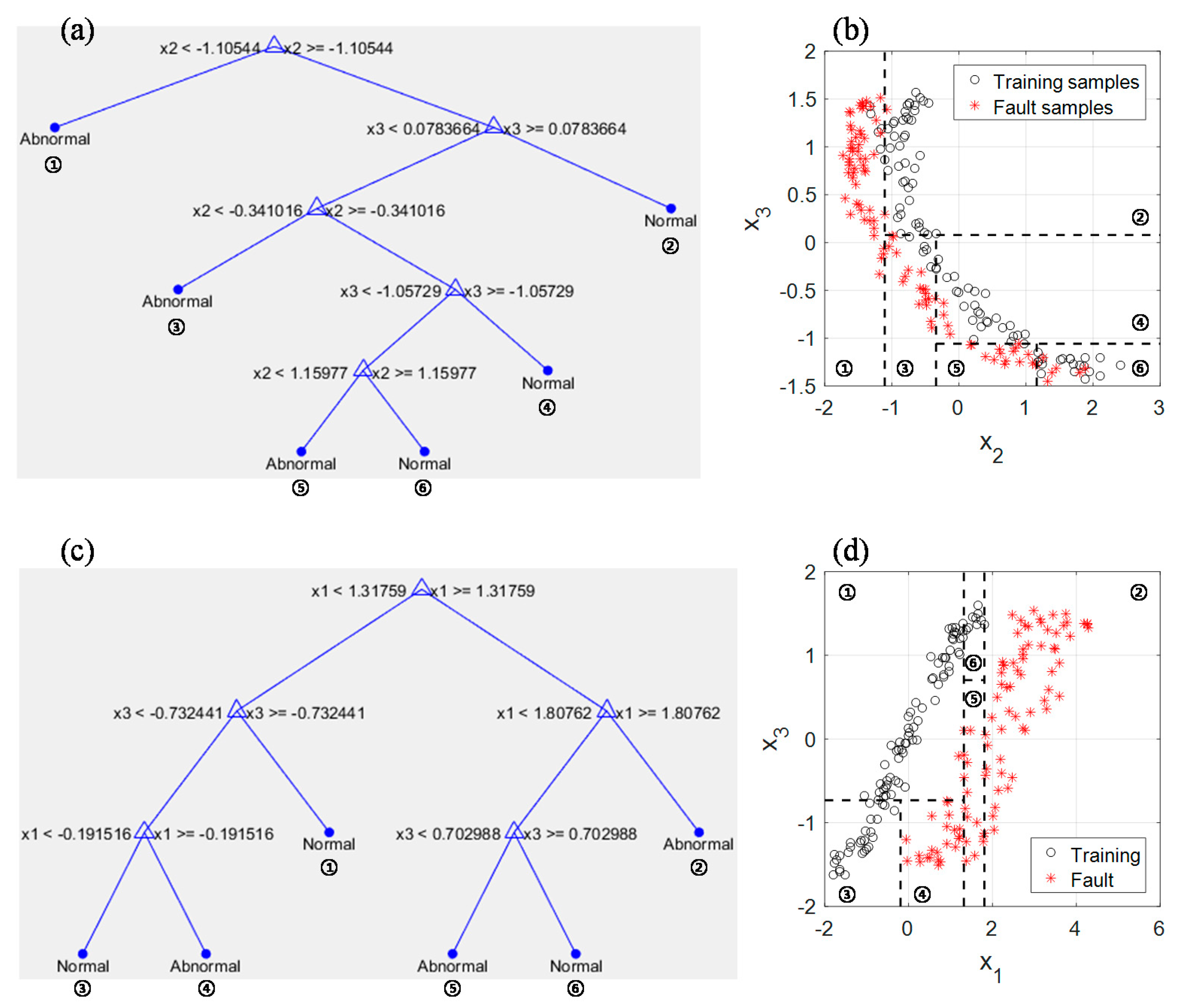
Figure 6 shows the constructed trees from which the importance values in
Figure 5 are extracted and the scatter plots for normal and faulty samples used to build the trees.
In
Figure 6b,d, normal and faulty samples are denoted by black circles and red asterisks, respectively; faulty samples in
Figure 6b,d correspond to samples at time
t = 201 to 300 and
t = 171 to 270 in Cases 1 and 2, respectively. Index numbers are marked at the bottom of each terminal node in
Figure 6a,c, and the corresponding rectangle regions in
Figure 6b,d are also indexed by the numbers. In the constructed trees, not only faulty variables but also non-faulty variables have been partitioned; it is important to note that identifying faulty variables via variable importance values in (8) is more reasonable than doing this only through checking split variables in the final trees. In
Figure 6b,d, it is obvious that non-faulty variables as well as faulty variables are required to define the decision boundaries for classifying normal and faulty samples. In other words, if the magnitude of mean shifts is small, both faulty and non-faulty variables are needed to derive the boundaries. As the magnitude of the bias and drift faults becomes larger, the need for non-faulty variables shrinks.
4.3. Drum-Type Steam Boiler in Thermal Power Plant
In this subsection, we present the results of applying the proposed fault isolation method to a 250 MW drum-type steam boiler.
Figure 7 [
11] describes the simplified schematic diagram of the target drum-type boiler.
The boiler raises steam by boiling feedwater using thermal energy converted from fossil fuel. After being preheated by extraction steam from the turbines at feedwater heaters, the feedwater is supplied to the economizer. The feedwater, heated again by flue gas at the economizer, flows into the drum. The feedwater and saturated water in the drum are fed into the evaporator through a downcomer. The evaporator raises saturated steam by absorbing radiant heat of the furnace. The saturated water and steam are separated at the drum. The superheater converts the main steam from the drum into high-purity superheated steam supplied to the high pressure turbine. Working in the high-pressure turbine, the main steam is reheated by reheater and provided to the intermediate pressure turbine. The main steam that exits from the low-pressure turbine is condensed into condensate water. After being boosted by pumps and preheated by feedwater heaters, the water is fed into the boiler again. For more details regarding TPPs, refer to the books of Sarkar [
38], Basu and Debnath [
39], Kitto and Stultz [
40], and Singer [
41].
In the target boiler, key process variables such as main steam temperature, furnace pressure, drum water level and condenser make-up flow need to be closely monitored to check whether they deviate from specified limits. For example, main steam temperature may show abnormal variations due to the following several factors: malfunction of attemperators, excess air ratio, fouling formed on outer surfaces of superheater, and slag attached to outer surfaces of waterwall. To avoid the failures due to extremely high metal temperature, it is indispensable to control the steam temperature precisely [
6]. When the steam temperature is lower than its rated value, moisture content in the main steam may increase; this may cause erosion of steam turbines. Also, if there are some problems with feedwater supply, drum water level may increase or decrease. The unusual rises of drum level may result in carryover of water into superheaters or steam turbines. On the other hand, if the level is too low, the amount of feedwater supplied into waterwall tubes declines. In this case, the tubes cannot readily absorb radiation energy generated in the furnace; this may reduce the life expectancy of the tubes due to overheating, and may lead to catastrophic disasters.
Table 1 lists process variables for condition monitoring of the target boiler in
Figure 7.
4.3.1. Artificial Fault Cases
From now on, we describe the results for fault isolation of artificially generated two fault cases in the target boiler. For the simulation study, 2500 historical normal samples from the target system are prepared; each sample is recoded in 5-min intervals. Among the normal samples, 2000 samples are used to train fault detection models (i.e., PCA and AAKR) and to form the normal data matrix
Xnormal in
Figure 1a; the remaining 500 samples are considered as test dataset. In the test dataset, we generate artificial drift and bias faults, respectively, starting at 201th samples as follows:
Case 1: x4 was linearly increased from t = 201 to the end by adding 0.1(t − 200) to the x4 value of each sample in this range, where t is the sample number.
Case 2: Step changes of x6 and x7 by 10 were introduced starting from t = 201 to the end.
Figure 8 shows the trajectories of faulty variables relevant with the Cases 1 and 2; blue and red solid lines describe normal and abnormal behaviors of the faulty variables without and with the artificial fault effects, respectively.
As shown in
Figure 8a, if the drift fault has occurred, main steam temperature (
x4) starts to gradually increase from 201th sample by 0.1 °C. In
Figure 8b,c, furnace pressure and drum level have risen steeply at time
t = 201, respectively.
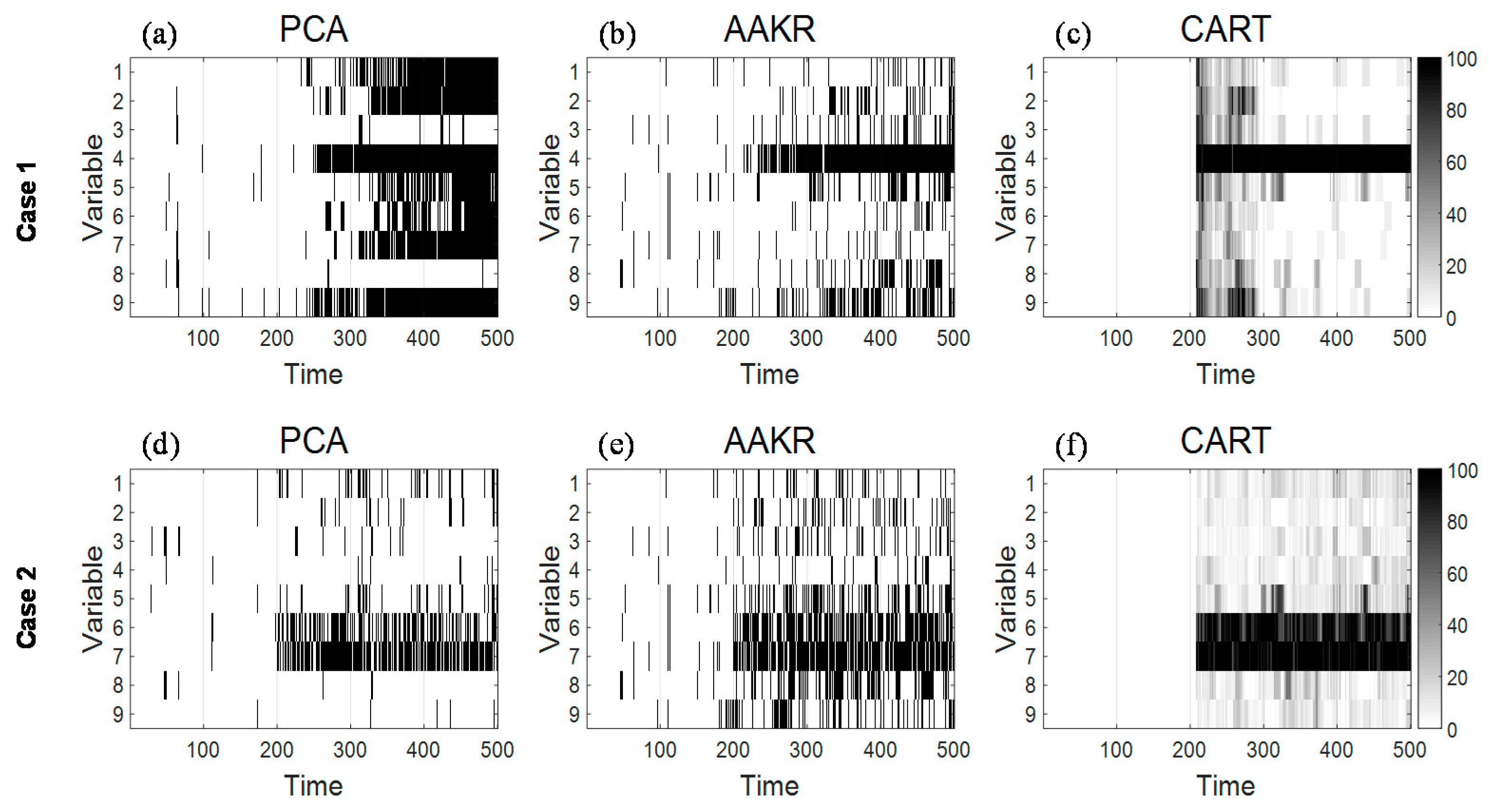
Figure 9 summarizes the fault isolation results obtained by applying comparison methods (PCA- and AAKR-based contribution plots) and Method 2 into Cases 1 and 2. In
Figure 9a,d,
Q and
T2 statistics-based contribution plots are used for fault isolation, respectively. First, let us look into the isolation results related with Case 1. As can be seen from
Figure 9a, contribution plot for
Q statistic suffers from smearing effect; it is observed that severe smearing arises at non-faulty variables
x1,
x2,
x5,
x6,
x7, and
x9. In
Figure 9b, contribution values of
x4 start to consistently depart from in-control region at about time
t = 230; although the magnitude of the drift fault becomes larger, minor fault smearing in some normal variables (i.e.,
x2,
x5,
x8,
x9) is observed in
Figure 9b. In the case of Method 2, normal variables as well as faulty variable
x4 have relatively high importance values in the early stage of the drift fault (from about time
t = 210 to 290); in the time period from
t = 300 to the end, we can confirm that Method 2 can isolate faulty variable
x4 more precisely than comparison methods.
In Case 2, contribution plot for
T2 statistic of PCA isolates faulty variables
x6 and
x7 more clearly than that of AAKR; but contribution values for
x6 deviate from threshold values insignificantly. In
Figure 9e, it is observed that fault smearing in normal variables
x5,
x8, and
x9 has happened. It is apparent from
Figure 9d,e,f that Method 2 achieves clearer isolation results than comparison methods.
Next, let us take a look at the isolation results based on Method 1, which are presented in
Figure 10. In Cases 1 and 2, the values of
are set as 500 and 400, respectively, and the value of
is set as 301 in both cases; here, 2000 normal samples (also used to train PCA and AAKR) constitute the normal data matrix
Xnormal. As presented in
Figure 10a, importance value of main steam temperature (
x4) is nearly 100, and the values of the others are less than 30; as a result, we can decide
x4 as major variable for discriminating normal and faulty samples of Case 1 in the original input space. In
Figure 10b, it can be observed that the variable importance values of furnace pressure (
x6) and drum level (
x7) are extremely higher than those of others.
Figure 11 shows the constructed tree from which the importance values in
Figure 10b are extracted and the corresponding scatter plot of normal and faulty samples (from
= 301 to
= 400). Only faulty variables
x6 and
x7 are used as split variables in
Figure 11a; the other variables do not appear in the final tree. As shown in
Figure 11b, the classification tree based on nonparametric CART algorithm can successfully define decision boundaries for separating normal and faulty samples.
4.3.2. Failure Data Due to Waterwall Tube Leakage
In this subsection, we provide the results of applying Methods 1 and 2 to failure data (also investigated in [
5,
11]) due to waterwall tube leakage, which is gathered from the target boiler in
Figure 7. Failure from one or more tubes in the boiler can be detected by sound and either by an increase in the make-up water requirement (indicating a failure of the water-carrying tubes) or by an increased draft in the superheater or reheater areas (due to failure of the superheater or reheater tubes) [
38]. The boiler tubes can be influenced by several damage processes such as inside scaling, waterside corrosion and cracking, fireside corrosion and/or erosion, stress rupture due to overheat and creep, vibration-induced and thermal fatigue cracking, and defective welds [
42]. Tube leakage from a pin-hole might be tolerated because of an adequate margin of feedwater and the leakage can be corrected after suitable scheduled maintenance [
43]. However, if the boiler is continuously operated with the leakage, much of the pressurized fluid will eventually leak and cause severe damage to neighboring tubes. Tube leakage of boiler, superheater and reheater could result in a serious efficiency decline.
Target failure dataset consists of 4273 training and 1054 test samples, respectively; sampling interval is equal to 5 min, and monitored variables are same as those listed in
Table 1. The matrix
Xtraining is composed of the training samples and they should be collected from the target boiler under normal operating conditions. The tube leakage occurred at 911th test sample, and after about 12 hours, unplanned shutdown procedures were initiated.
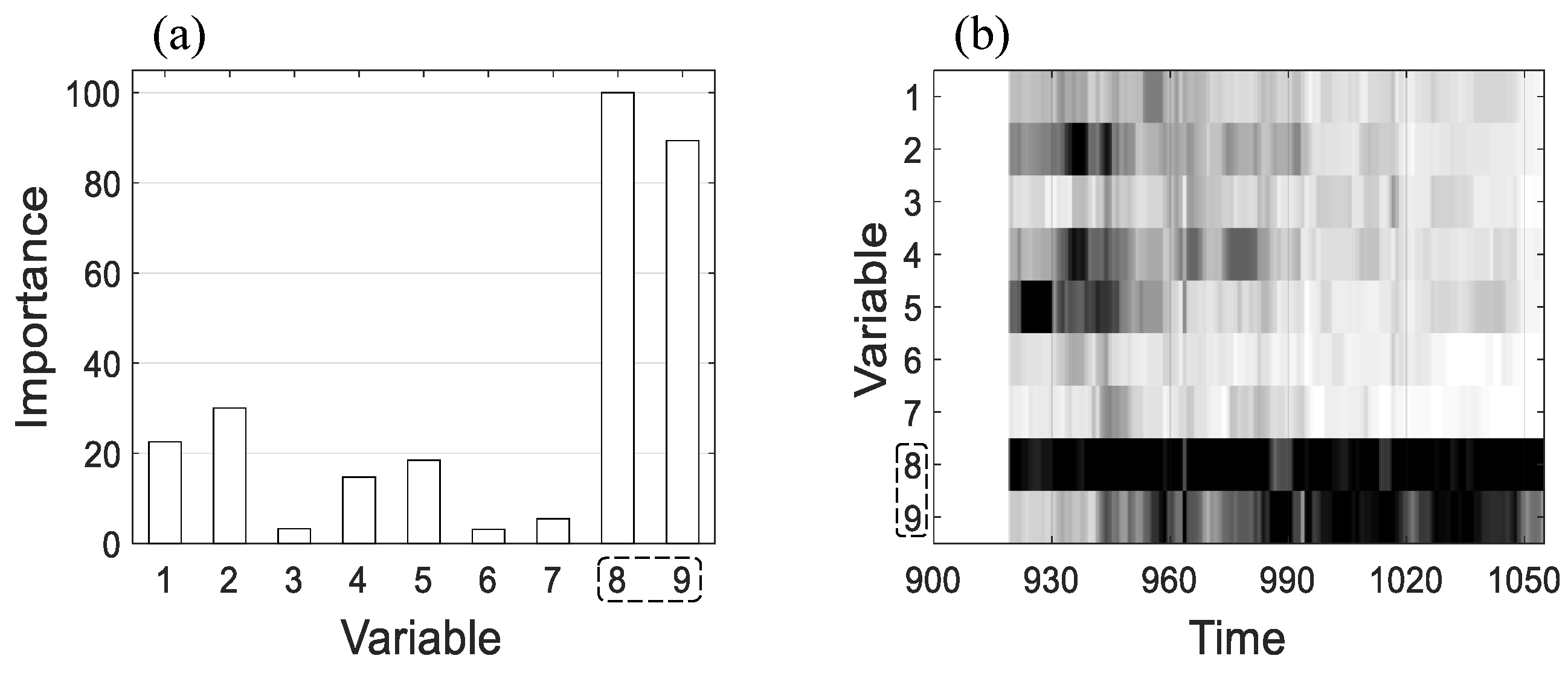
Figure 12 shows the fault isolation results for the failure dataset based on Methods 1 and 2; here,
and
are set as 951 and 1050, respectively. As can be seen from
Figure 12a, importance values of condenser make-up flow (
x8) and feedwater flow (
x9) are larger than 80 in the time interval (from
t = 951 to
t = 1050); those of others in the interval are smaller than 40. In
Figure 12b, normal variables such as
x2,
x4, and
x5 exhibit high importance values temporarily at the beginning of the leakage; as the strength of leakage becomes larger, faulty variables
x8 and
x9 are precisely isolated.
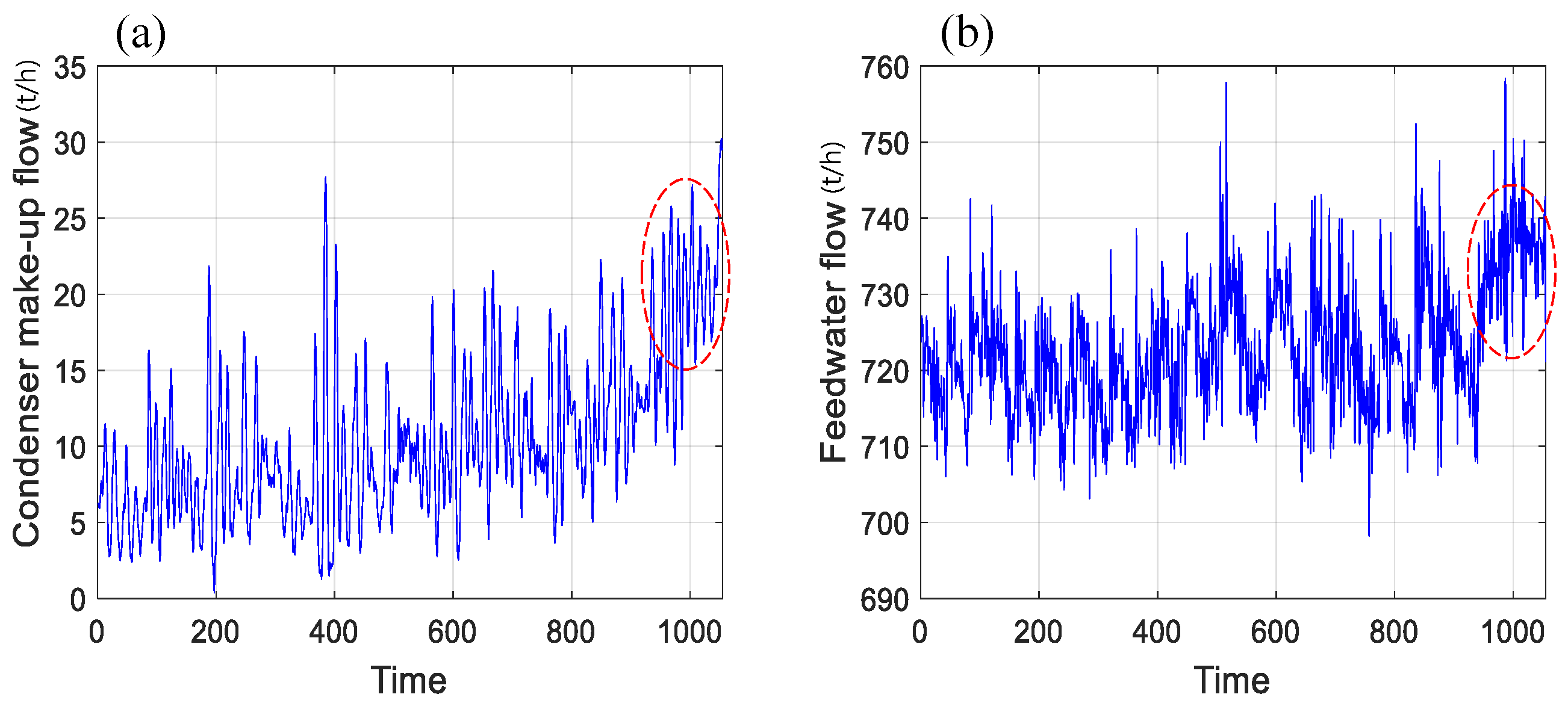
Figure 13 describes the trajectories of the faulty variables (
x8 and
x9) in the test period; it can be observed that condenser make-up flow and feedwater flow start to rise sharply at the time
t = 911.
4.4. Discussion
In this subsection, we summarize the strengths of the proposed fault isolation method, which are confirmed from the experimental results in
Section 4.1,
Section 4.2 and
Section 4.3. The main strength of the proposed method is that it does not suffer from smearing effect. As shown in
Figure 2,
Figure 4, and
Figure 9, PCA- and AAKR-based contribution plots are troubled with smearing effect; in contrast, the proposed isolation method (i.e., Method 2) can clearly locate faults without the smearing as the fault magnitude becomes larger. In PCA, the contribution values are obtained through projecting query samples in the original space onto a reduced latent space; latent variables are linear combinations of all original variables. Therefore, contribution values of non-faulty variables are also influenced by faulty variables. In AAKR, each component of predicted vectors is a function of both non-faulty and faulty variables; contribution analysis based on the predicted vectors also suffers from fault smearing. The proposed method locates faults by selecting original input variables with higher explanatory powers to discriminate normal and faulty samples. In other words, the proposed method does not suffer from smearing effect because it is based on CART classifiers with decision boundaries only in the original input space. The second strength is that, as described in
Figure 4 and
Figure 5, the proposed method can properly identify faulty variables of nonlinear process. PCA with the assumption of process linearity is unsuitable for fault detection and isolation of nonlinear processes. As shown in
Figure 4, although fault isolation with nonparametric AAKR is troubled with fault smearing, the proposed method can accurately identify faulty variables of the nonlinear process. Except for the strengths mentioned above, the proposed method does not require historical faulty dataset and any prior knowledge and experience.
5. Conclusions
In complex and nonlinear industrial processes, data-driven fault detection and isolation for process monitoring has become more important than ever before; compared with fault detection, fault isolation methods have not been studied very much. In this paper, we proposed a fault isolation method for a drum-type steam boiler via CART-based variable ranking. Method 1 is intended to identify faulty variables in entire fault regions, and it is proper for post analysis of occurring faults offline. In Method 2, fault isolation is carried out through time window sliding; Method 2 is suitable for monitoring fault evolution and propagation. To validate the fault isolation performance, the proposed method and comparison methods were applied to two benchmark problems and 250 MW drum-type steam boiler. The experimental results showed that the proposed method can locate faults more clearly than comparison methods without being affected by smearing effect. The proposed method, based on nonparametric CART, can properly deal with nonlinear processes, and can correctly identify faulty variables, even when normal and faulty samples are linearly inseparable from each other.
In future research, we will consider the following three topics. The first topic is to verify the performance of proposed method for time-varying processes. For example, since the process equipment is gradually degraded over time, it usually shows time-varying behaviors. If components of the matrix
Xnormal (see
Figure 1) are updated with the latest normal samples at every moment, the proposed method may take the time-varying characteristics of target systems into consideration for fault isolation. Second, we will also perform comparative studies between the proposed method and recently developed methods in [
27,
28,
44,
45]; this will further ensure the validity of the proposed method. Lastly, to improve the isolation performance, we will develop variable ranking methods with consideration for structural properties (described in [
46]) of binary decision trees.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}