Hybrid Artificial Intelligence Approaches for Predicting Buckling Damage of Steel Columns Under Axial Compression


 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Methods Used
2.1. Machine Learning Methods
2.1.1. Adaptive Networks-Based Fuzzy Inference System
- Layer 1: Every node in this layer is a squared node with a node function as below:where and are linguistic labels of the inputs x and y, respectively, and and are the membership functions of and .
- Layer 2: Every node in this layer is fixed and labeled with an “M” sign, multiplies the incoming signals and sends the output.
- Layer 3: Every node is fixed and labeled with “N”. The outputs are normalized as:
- Layer 4: Every node in this layer is an adaptive node with the node function indicated as following equation:where infers the outputs of layer 3.
- Layer 5: Every node in this layer is a single fixed node and labeled with “”; it sums up all incoming signals to compute the overall output:
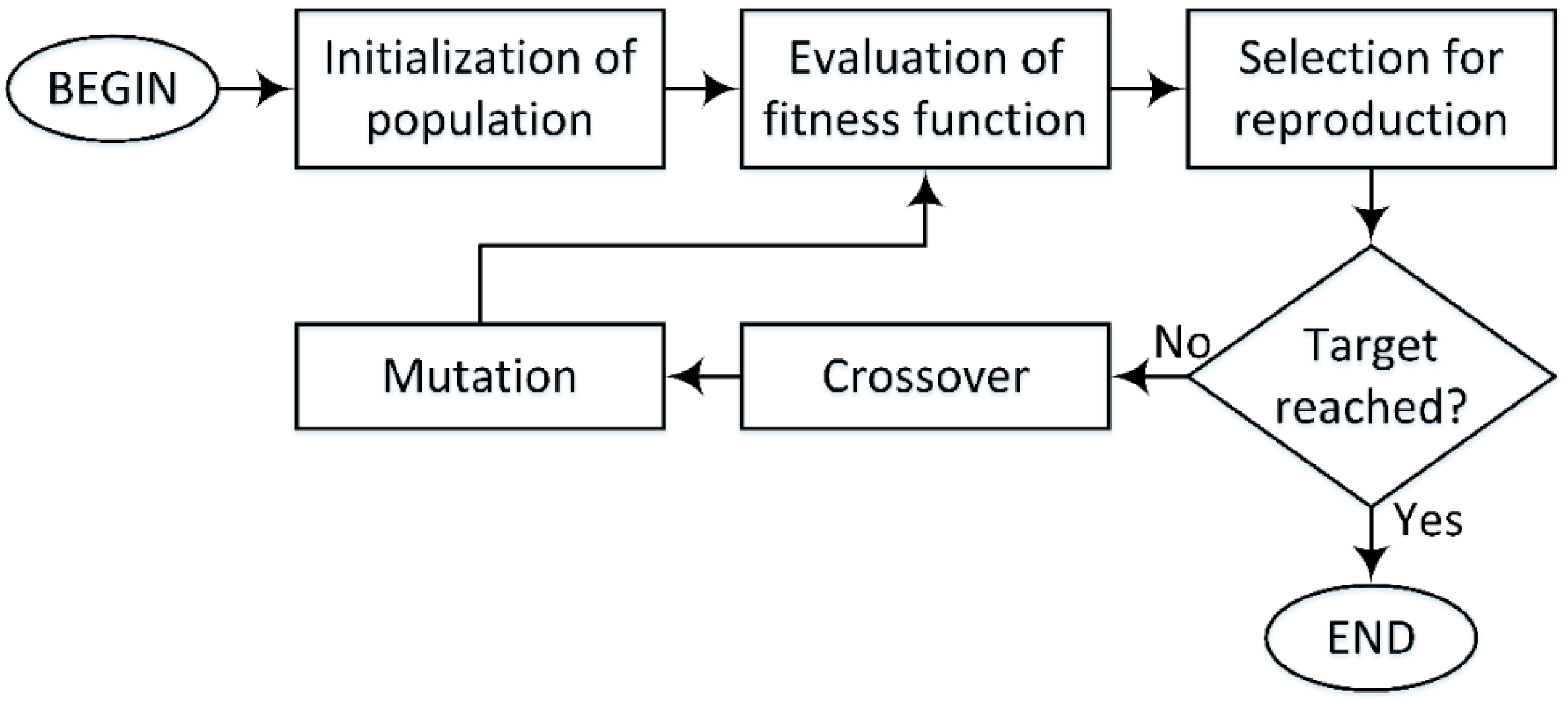
2.1.2. Genetic Algorithm
- (1)
- Initialization of population: in this step, an initial set of solutions (population of chromosomes) to the current problem is introduced. Given N such that the size of the population (number of chromosomes), the choice of N is important, if N is too big, the algorithm might take too much time to perform. On the other hand, if N is too small, it might not be sufficient to reach an optimal solution. The choice of a fitness function is also defined in this step in order to evaluate how good the solution is in the next step.
- (2)
- Evaluation of fitness function value: in this step, the fitness function value of each chromosome in the population is evaluated in order to verify if the chromosome is good enough to be reproduced.
- (3)
- Selection for reproduction: in this step, a selection of best chromosomes is performed based on the fitness function value of each chromosome. The better they fit the fitness function, the more likely they will be chosen to be reproduced. After this step, if the stopping criterion is reached, the algorithm will stop; if not, the next two steps will be executed.
- (4)
- Crossover: this step is realized with the contribution of two chromosomes. A crossover point is randomly chosen inside the chromosome; then, offspring are created by exchanging genes from their parents. For example, considering two chromosomes S1 and S2 defined as:Given the crossover point i = 2, we have the new offspring of S1 and S2 such that:
- (5)
- Mutation: this process is performed within each individual offspring after crossover, their genes can be mutated in order to produce more offspring. For example, the new offspring of S1′ after mutation can be expressed such that:
2.1.3. Particle Swarm Optimization
- Proximity: it is able to perform simple calculations in time and space.
- Stability: the swarm does not change the behavior regarding every environment change.
- Quality: it is able to detect the quality change in the environment and respond to it.
- Diverse response: it has no limitation in the response to environment change.
- Adaptability: it is able to know if the change is worthy.
- (1)
- For each particle of the population, the best position that the particle has reached thus far, called pBest, is evaluated. If the current position is better than the previous position, then the particle position is updated; otherwise, the previous position is kept.
- (2)
- Evaluate gBest, which is the best position of the particles in the entire population.
- (3)
- Update the velocity using pBest and gBest. The new velocity is computed by:where i is particle index, t is time index, ε1 and ε2 are two random vectors in range [0, 1] and α and β are positive constants.
- (4)
- Update position of the particle. The new position of particles is calculated by:
2.2. Validation Criteria
2.3. Monte Carlo Method
3. Data Used and Input Selection
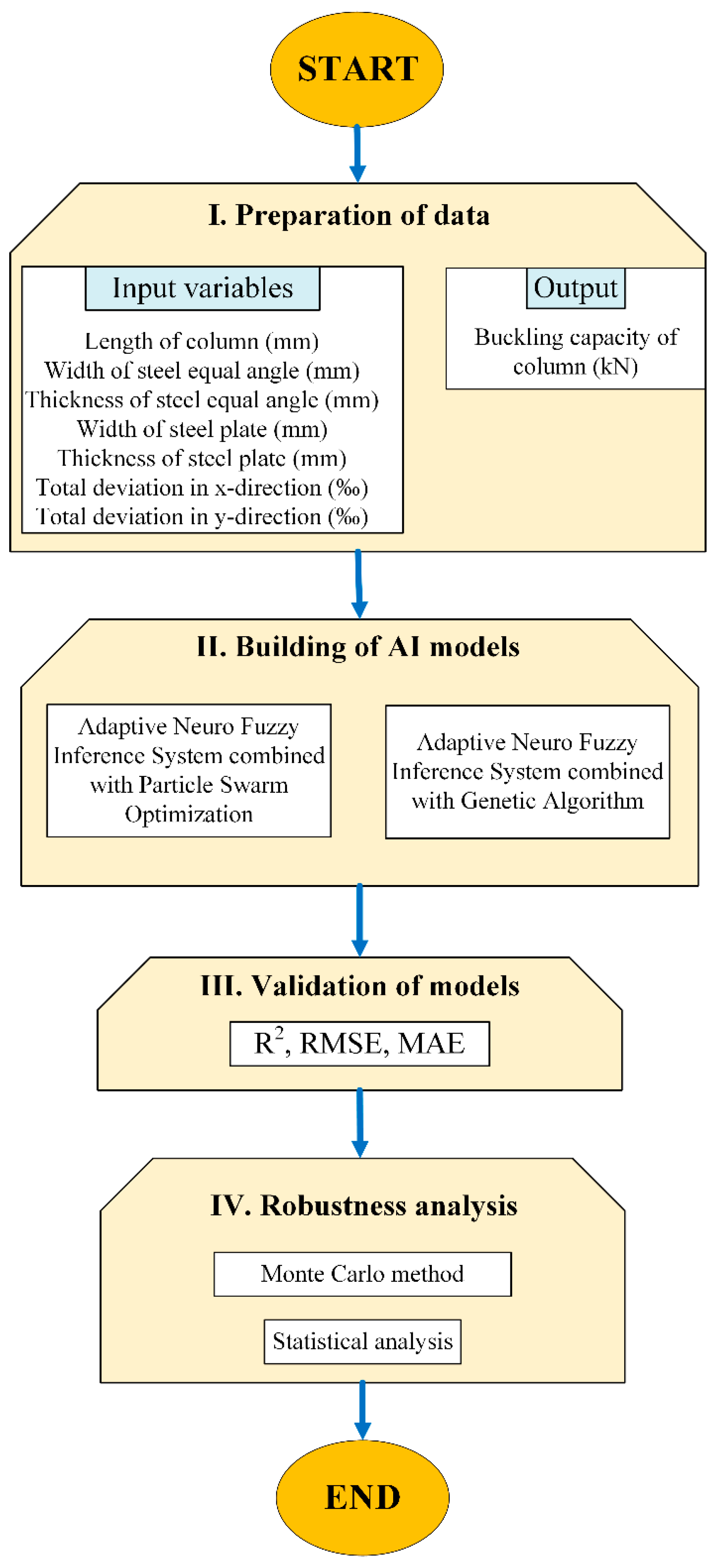
4. Methodology
5. Results and Discussion
5.1. Validation of Models and Prediction Capability
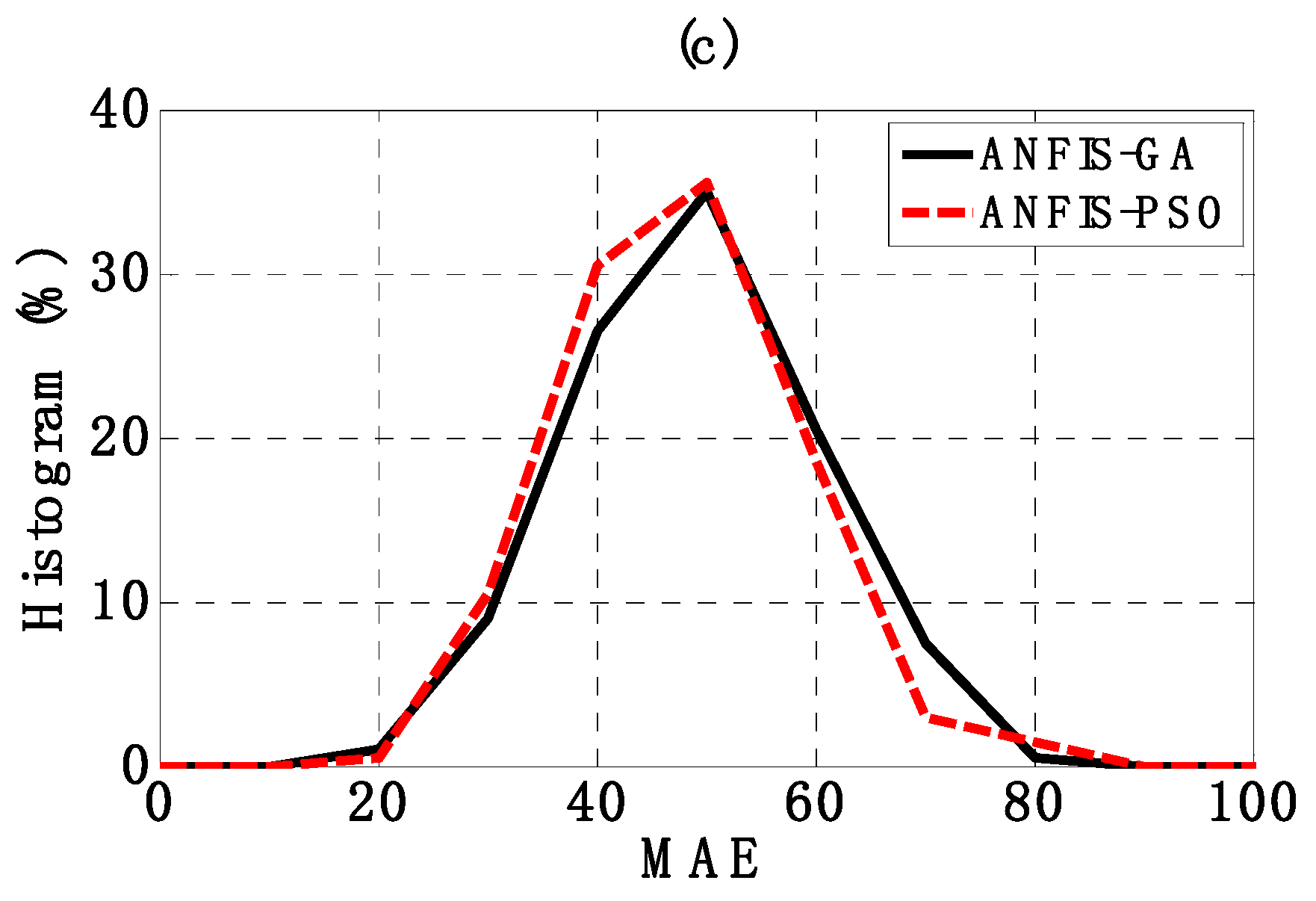
5.2. Robustness of Models
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kollar, L. Structural Stability in Engineering Practice; CRC Press: Boca Raton, FL, USA, 1999. [Google Scholar]
- Almeida, J.H.S.; Tonatto, M.L.P.; Ribeiro, M.L.; Tita, V.; Amico, S.C. Buckling and post-buckling of filament wound composite tubes under axial compression: Linear, nonlinear, damage and experimental analyses. Compos. Part B Eng. 2018, 149, 227–239. [Google Scholar] [CrossRef]
- Almeida, J.H.S.; Bittrich, L.; Jansen, E.; Tita, V.; Spickenheuer, A. Buckling optimization of composite cylinders for axial compression: A design methodology considering a variable-axial fiber layout. Compos. Struct. 2019, 222, 110928. [Google Scholar] [CrossRef]
- Edlund, B.L.O. Buckling of metallic shells: Buckling and postbuckling behaviour of isotropic shells, especially cylinders. Struct. Control. Health Monit. 2007, 14, 693–713. [Google Scholar] [CrossRef]
- Jones, R.M. Buckling of Bars, Plates, and Shells; Bull Ridge Publishing: Blacksburg, VA, USA, 2007. [Google Scholar]
- Shi, G.; Zhou, W.J.; Bai, Y.; Lin, C.C. Local buckling of 460 MPa high strength steel welded section stub columns under axial compression. J. Constr. Steel Res. 2014, 100, 60–70. [Google Scholar] [CrossRef]
- Kim, D.-K.; Lee, C.-H.; Han, K.-H.; Kim, J.-H.; Lee, S.-E.; Sim, H.-B. Strength and residual stress evaluation of stub columns fabricated from 800MPa high-strength steel. J. Constr. Steel Res. 2014, 102, 111–120. [Google Scholar] [CrossRef]
- Shi, G.; Xu, K.; Ban, H.; Lin, C. Local buckling behavior of welded stub columns with normal and high strength steels. J. Constr. Steel Res. 2016, 119, 144–153. [Google Scholar] [CrossRef]
- Ma, T.-Y.; Liu, X.; Hu, Y.-F.; Chung, K.-F.; Li, G.-Q. Structural behaviour of slender columns of high strength S690 steel welded H-sections under compression. Eng. Struct. 2018, 157, 75–85. [Google Scholar] [CrossRef]
- Yang, B.; Shen, L.; Kang, S.-B.; Elchalakani, M.; Nie, S.-D. Load bearing capacity of welded Q460GJ steel H-columns under eccentric compression. J. Constr. Steel Res. 2018, 143, 320–330. [Google Scholar] [CrossRef]
- Shi, G.; Jiang, X.; Zhou, W.J.; Chan, T.M.; Zhang, Y. Experimental study on column buckling of 420 MPa high strength steel welded circular tubes. J. Constr. Steel Res. 2014, 100, 71–81. [Google Scholar] [CrossRef]
- Prathap, G.; Varadan, T.K. The Inelastic Large Deformation of Beams. J. Appl. Mech. 1976, 43, 689–690. [Google Scholar] [CrossRef]
- Oden, J.T.; Childs, S.B. Finite Deflections of a Nonlinearly Elastic Bar. J. Appl. Mech. 1970, 37, 48–52. [Google Scholar] [CrossRef]
- Lewis, G.; Monasa, F. Large deflections of cantilever beams of nonlinear materials. Comput. Struct. 1981, 14, 357–360. [Google Scholar] [CrossRef]
- Saetiew, W.; Chucheepsakul, S. Post-buckling of linearly tapered column made of nonlinear elastic materials obeying the generalized Ludwick constitutive law. Int. J. Mech. Sci. 2012, 65, 83–96. [Google Scholar] [CrossRef]
- Solano-Carrillo, E. Semi-exact solutions for large deflections of cantilever beams of non-linear elastic behaviour. Int. J. Non-Linear Mech. 2009, 44, 253–256. [Google Scholar] [CrossRef]
- Jiang, D.; Bechle, N.J.; Landis, C.M.; Kyriakides, S. Buckling and recovery of NiTi tubes under axial compression. Int. J. Solids Struct. 2016, 80, 52–63. [Google Scholar] [CrossRef]
- DeSalvo, G.J.; Swanson, J.A. (Eds.) ANSYS Engineering Analysis System User’s Manual; Swanson Analysis Systems: Houston, PA, USA, 1985. [Google Scholar]
- Smith, M. ABAQUS/Standard User’s Manual; Version 6.9; Dassault Systemes Simulia Corp: Providence, RI, USA, 2009. [Google Scholar]
- Crisfield, M.A. A faster modified newton-raphson iteration. Comput. Methods Appl. Mech. Eng. 1979, 20, 267–278. [Google Scholar] [CrossRef]
- Crisfield, M.A.; Remmers, J.J.; Verhoosel, C.V. Nonlinear Finite Element Analysis of Solids and Structures; John Wiley & Sons: Hoboken, NJ, USA, 1997. [Google Scholar]
- Damanpack, A.R.; Bodaghi, M.; Liao, W.H. Snap buckling of NiTi tubes. Int. J. Solids Struct. 2018, 146, 29–42. [Google Scholar] [CrossRef]
- Wempner, G.A. Discrete approximations related to nonlinear theories of solids. Int. J. Solids Struct. 1971, 7, 1581–1599. [Google Scholar] [CrossRef]
- Crisfield, M. A fast incremental/iterative solution procedure that handles “snap-through.” In Computational Methods in Nonlinear Structural and Solid Mechanics; Elsevier: Amsterdam, The Netherlands, 1981; pp. 55–62. [Google Scholar]
- Boutyour, E.H.; Zahrouni, H.; Potier-Ferry, M.; Boudi, M. Asymptotic-numerical method for buckling analysis of shell structures with large rotations. J. Comput. Appl. Math. 2004, 168, 77–85. [Google Scholar] [CrossRef] [Green Version]
- Kirchdoerfer, T.; Ortiz, M. Data-driven computational mechanics. Comput. Methods Appl. Mech. Eng. 2016, 304, 81–101. [Google Scholar] [CrossRef] [Green Version]
- Lakshmi, A.A.; Rao, C.S.; Srikanth, M.; Faisal, K.; Fayaz, K.; Puspalatha; Singh, S.K. Prediction of mechanical properties of ASS 304 in superplastic region using artificial neural networks. Mater. Today Proc. 2018, 5, 3704–3712. [Google Scholar] [CrossRef]
- Thankachan, T.; Prakash, K.S.; David Pleass, C.; Rammasamy, D.; Prabakaran, B.; Jothi, S. Artificial neural network to predict the degraded mechanical properties of metallic materials due to the presence of hydrogen. Int. J. Hydrogen Energy 2017, 42, 28612–28621. [Google Scholar] [CrossRef] [Green Version]
- Reddy, T.C.S. Predicting the strength properties of slurry infiltrated fibrous concrete using artificial neural network. Front. Struct. Civ. Eng. 2018, 12, 490–503. [Google Scholar] [CrossRef]
- Li, X.; Liu, Z.; Cui, S.; Luo, C.; Li, C.; Zhuang, Z. Predicting the effective mechanical property of heterogeneous materials by image based modeling and deep learning. Comput. Methods Appl. Mech. Eng. 2019, 347, 735–753. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Wu, C.T.; Koishi, M. A deep material network for multiscale topology learning and accelerated nonlinear modeling of heterogeneous materials. Comput. Methods Appl. Mech. Eng. 2019, 345, 1138–1168. [Google Scholar] [CrossRef]
- Naderpour, H.; Poursaeidi, O.; Ahmadi, M. Shear resistance prediction of concrete beams reinforced by FRP bars using artificial neural networks. Measurement 2018, 126, 299–308. [Google Scholar] [CrossRef]
- Perera, R.; Barchín, M.; Arteaga, A.; Diego, A.D. Prediction of the ultimate strength of reinforced concrete beams FRP-strengthened in shear using neural networks. Compos. Part B Eng. 2010, 41, 287–298. [Google Scholar] [CrossRef]
- Tanarslan, H.M.; Secer, M.; Kumanlioglu, A. An approach for estimating the capacity of RC beams strengthened in shear with FRP reinforcements using artificial neural networks. Constr. Build. Mater. 2012, 30, 556–568. [Google Scholar] [CrossRef]
- Ahmadi, M.; Naderpour, H.; Kheyroddin, A. Utilization of artificial neural networks to prediction of the capacity of CCFT short columns subject to short term axial load. Arch. Civ. Mech. Eng. 2014, 14, 510–517. [Google Scholar] [CrossRef]
- Bui, D.-K.; Nguyen, T.; Chou, J.-S.; Nguyen-Xuan, H.; Ngo, T.D. A modified firefly algorithm-artificial neural network expert system for predicting compressive and tensile strength of high-performance concrete. Constr. Build. Mater. 2018, 180, 320–333. [Google Scholar] [CrossRef]
- Prasad, B.K.R.; Eskandari, H.; Reddy, B.V.V. Prediction of compressive strength of SCC and HPC with high volume fly ash using ANN. Constr. Build. Mater. 2009, 23, 117–128. [Google Scholar] [CrossRef]
- Topçu, İ.B.; Sarıdemir, M. Prediction of compressive strength of concrete containing fly ash using artificial neural networks and fuzzy logic. Comput. Mater. Sci. 2008, 41, 305–311. [Google Scholar] [CrossRef]
- Khademi, F.; Jamal, S.M.; Deshpande, N.; Londhe, S. Predicting strength of recycled aggregate concrete using Artificial Neural Network, Adaptive Neuro-Fuzzy Inference System and Multiple Linear Regression. Int. J. Sustain. Built Environ. 2016, 5, 355–369. [Google Scholar] [CrossRef] [Green Version]
- Özcan, F.; Atiş, C.D.; Karahan, O.; Uncuoğlu, E.; Tanyildizi, H. Comparison of artificial neural network and fuzzy logic models for prediction of long-term compressive strength of silica fume concrete. Adv. Eng. Softw. 2009, 40, 856–863. [Google Scholar] [CrossRef]
- Bingöl, A.F.; Tortum, A.; Gül, R. Neural networks analysis of compressive strength of lightweight concrete after high temperatures. Mater. Des. 2013, 52, 258–264. [Google Scholar] [CrossRef]
- Kalman Šipoš, T.; Miličević, I.; Siddique, R. Model for mix design of brick aggregate concrete based on neural network modelling. Constr. Build. Mater. 2017, 148, 757–769. [Google Scholar] [CrossRef]
- Jimenez-Martinez, M.; Alfaro-Ponce, M. Fatigue damage effect approach by artificial neural network. Int. J. Fatigue 2019, 124, 42–47. [Google Scholar] [CrossRef]
- Tan, Z.X.; Thambiratnam, D.P.; Chan, T.H.T.; Abdul Razak, H. Detecting damage in steel beams using modal strain energy based damage index and Artificial Neural Network. Eng. Fail. Anal. 2017, 79, 253–262. [Google Scholar] [CrossRef] [Green Version]
- Padil, K.H.; Bakhary, N.; Hao, H. The use of a non-probabilistic artificial neural network to consider uncertainties in vibration-based-damage detection. Mech. Syst. Signal Process. 2017, 83, 194–209. [Google Scholar] [CrossRef]
- ul Rehman Tahir, Z.; Mandal, P. Artificial neural network prediction of buckling load of thin cylindrical shells under axial compression. Eng. Struct. 2017, 152, 843–855. [Google Scholar] [CrossRef]
- Waszczyszyn, Z.; Bartczak, M. Neural prediction of buckling loads of cylindrical shells with geometrical imperfections. Int. J. Non-Linear Mech. 2002, 37, 763–775. [Google Scholar] [CrossRef]
- Mallela, U.K.; Upadhyay, A. Buckling load prediction of laminated composite stiffened panels subjected to in-plane shear using artificial neural networks. Thin-Walled Struct. 2016, 102, 158–164. [Google Scholar] [CrossRef]
- Tohidi, S.; Sharifi, Y. Neural networks for inelastic distortional buckling capacity assessment of steel I-beams. Thin-Walled Struct. 2015, 94, 359–371. [Google Scholar] [CrossRef]
- Dias, J.L.R.; Silvestre, N. A neural network based closed-form solution for the distortional buckling of elliptical tubes. Eng. Struct. 2011, 33, 2015–2024. [Google Scholar] [CrossRef]
- Bilgehan, M. Comparison of ANFIS and NN models—With a study in critical buckling load estimation. Appl. Soft Comput. 2011, 11, 3779–3791. [Google Scholar] [CrossRef]
- Yu, X.; Deng, H.; Zhang, D.; Cui, L. Buckling behavior of 420MPa HSSY columns: Test investigation and design approach. Eng. Struct. 2017, 148, 793–812. [Google Scholar] [CrossRef]
- Jang, J.-R. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Azadeh, A.; Asadzadeh, S.M.; Ghanbari, A. An adaptive network-based fuzzy inference system for short-term natural gas demand estimation: Uncertain and complex environments. Energy Policy 2010, 38, 1529–1536. [Google Scholar] [CrossRef]
- Güler, İ.; Übeyli, E.D. Adaptive neuro-fuzzy inference system for classification of EEG signals using wavelet coefficients. J. Neurosci. Methods 2005, 148, 113–121. [Google Scholar] [CrossRef] [PubMed]
- Holland, J. Adaptation In Natural and Artificial Systems; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- De Jong, K.A. Analysis of the Behavior of a Class of Genetic Adaptive Systems. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 1975. [Google Scholar]
- Mitchell, M. An Introduction to Genentic Algorithms; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Whitley, D. A genetic algorithm tutorial. Stat. Comput. 1994, 4, 65–85. [Google Scholar] [CrossRef]
- Winiczenko, R.; Salat, R.; Awtoniuk, M. Estimation of tensile strength of ductile iron friction welded joints using hybrid intelligent methods. Trans. Nonferrous Met. Soc. China 2013, 23, 385–391. [Google Scholar] [CrossRef]
- Winiczenko, R. Effect of friction welding parameters on the tensile strength and microstructural properties of dissimilar AISI 1020-ASTM A536 joints. Int. J. Adv. Manuf. Technol. 2016, 84, 941–955. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the MHS’95. Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Alrashidi, M.R.; El-Hawary, M. A Survey of Particle Swarm Optimization Applications in Electric Power Systems. IEEE Trans. Evol. Comput. 2009, 13, 913–918. [Google Scholar] [CrossRef]
- Poli, R. Analysis of the Publications on the Applications of Particle Swarm Optimisation. J. Artif. Evol. Appl. 2007. [Google Scholar] [CrossRef]
- Saravanan, M.; Slochanal, S.M.R.; Venkatesh, P.; Abraham, P.S. Application of PSO technique for optimal location of FACTS devices considering system loadability and cost of installation. In Proceedings of the 2005 International Power Engineering Conference, Singapore, 29 November–2 December 2006. [Google Scholar]
- van den Bergh, F. An Analysis of Particle Swarm Optimizers. Ph.D. Thesis, University of Pretoria, Pretoria, South Africa, 2006. [Google Scholar]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 387–408. [Google Scholar] [CrossRef]
- Menard, S. Coefficients of Determination for Multiple Logistic Regression Analysis. Am. Stat. 2000, 54, 17–24. [Google Scholar]
- Chai, T.; Draxler, R.R. Root mean square error (RMSE) or mean absolute error (MAE)?—Arguments against avoiding RMSE in the literature. Geosci. Model Dev. 2014, 7, 1247–1250. [Google Scholar] [CrossRef]
- Dao, D.V.; Ly, H.-B.; Trinh, S.H.; Le, T.-T.; Pham, B.T. Artificial Intelligence Approaches for Prediction of Compressive Strength of Geopolymer Concrete. Materials 2019, 12, 983. [Google Scholar] [CrossRef]
- Willmott, C.J.; Matsuura, K. Advantages of the mean absolute error (MAE) over the root mean square error (RMSE) in assessing average model performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]
- Dao, D.V.; Trinh, S.H.; Ly, H.-B.; Pham, B.T. Prediction of Compressive Strength of Geopolymer Concrete Using Entirely Steel Slag Aggregates: Novel Hybrid Artificial Intelligence Approaches. Appl. Sci. 2019, 9, 1113. [Google Scholar] [CrossRef]
- Ly, H.-B.; Monteiro, E.; Le, T.-T.; Le, V.M.; Dal, M.; Regnier, G.; Pham, B.T. Prediction and Sensitivity Analysis of Bubble Dissolution Time in 3D Selective Laser Sintering Using Ensemble Decision Trees. Materials 2019, 12, 1544. [Google Scholar] [CrossRef]
- Pham, B.T.; Nguyen, M.D.; Dao, D.V.; Prakash, I.; Ly, H.-B.; Le, T.-T.; Ho, L.S.; Nguyen, K.T.; Ngo, T.Q.; Hoang, V.; et al. Development of artificial intelligence models for the prediction of Compression Coefficient of soil: An application of Monte Carlo sensitivity analysis. Sci. Total. Environ. 2019, 679, 172–184. [Google Scholar] [CrossRef]
- Soize, C. Uncertainty Quantification: An Accelerated Course with Advanced Applications in Computational Engineering; Interdisciplinary Applied Mathematics; Springer International Publishing: Berlin, Germany, 2017; ISBN 978-3-319-54338-3. [Google Scholar]
- Yuan, J.; Xia, Y.; Yang, B. A note on the Monte Carlo simulation of the tensile deformation and failure process of unidirectional composites. Compos. Sci. Technol. 1994, 52, 197–204. [Google Scholar] [CrossRef]
- Le, T.T.; Guilleminot, J.; Soize, C. Stochastic continuum modeling of random interphases from atomistic simulations. Application to a polymer nanocomposite. Comput. Methods Appl. Mech. Eng. 2016, 303, 430–449. [Google Scholar] [CrossRef] [Green Version]
- Rey, V.; Krumscheid, S.; Nobile, F. Quantifying uncertainties in contact mechanics of rough surfaces using the multilevel Monte Carlo method. Int. J. Eng. Sci. 2019, 138, 50–64. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Kumar, M. On the effectiveness of Monte Carlo for initial uncertainty forecasting in nonlinear dynamical systems. Automatica 2018, 87, 301–309. [Google Scholar] [CrossRef]
- Motra, H.B.; Hildebrand, J.; Wuttke, F. The Monte Carlo Method for evaluating measurement uncertainty: Application for determining the properties of materials. Probabilistic Eng. Mech. 2016, 45, 220–228. [Google Scholar] [CrossRef]
- Capillon, R.; Desceliers, C.; Soize, C. Uncertainty quantification in computational linear structural dynamics for viscoelastic composite structures. Comput. Methods Appl. Mech. Eng. 2016, 305, 154–172. [Google Scholar] [CrossRef] [Green Version]
- Rubinstein, R.Y.; Kroese, D.P. Simulation and the Monte Carlo Method, 3rd ed.; Wiley: Hoboken, NJ, USA, 2016; ISBN 978-1-118-63216-1. [Google Scholar]
- Kalos, M.H.; Whitlock, P.A. Monte Carlo Methods, 2nd ed.; Wiley-VCH: Weinheim, Germany, 2008; ISBN 978-3-527-40760-6. [Google Scholar]
- Guilleminot, J.; Le, T.T.; Soize, C. Stochastic framework for modeling the linear apparent behavior of complex materials: Application to random porous materials with interphases. Acta Mech. Sin. 2013, 29, 773–782. [Google Scholar] [CrossRef] [Green Version]
- Rendler, N.J.; Vigness, I. Hole-drilling strain-gage method of measuring residual stresses. Exp. Mech. 1966, 6, 577–586. [Google Scholar] [CrossRef]
- Cao, K.; Guo, Y.-J.; Zeng, D.-W. Buckling behavior of large-section and 420MPa high-strength angle steel columns. J. Constr. Steel Res. 2015, 111, 11–20. [Google Scholar] [CrossRef]
- Ban, H.; Shi, G.; Shi, Y.; Wang, Y. Residual Stress Tests of High-Strength Steel Equal Angles. J. Struct. Eng. 2012, 138, 1446–1454. [Google Scholar] [CrossRef]
- Almeida, J.H.S.; Ribeiro, M.L.; Tita, V.; Amico, S.C. Stacking sequence optimization in composite tubes under internal pressure based on genetic algorithm accounting for progressive damage. Compos. Struct. 2017, 178, 20–26. [Google Scholar] [CrossRef]
- Valarmathi, K.; Devaraj, D.; Radhakrishnan, T.K. Real-coded genetic algorithm for system identification and controller tuning. Appl. Math. Model. 2009, 33, 3392–3401. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Y.-H.; Lai, C.-M.; Teh, J. Genetic algorithm with small population size for search feasible control parameters for parallel hybrid electric vehicles. AIMS Energy 2017, 5, 930–943. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N° | Specimen | L (mm) | wa (mm) | ta (mm) | wp (mm) | tp (mm) | δx (‰) | δy (‰) | Pu (kN) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | M1130-1 | 1260 | 140.2 | 10.17 | 100.5 | 10.13 | 1.83 | 2.69 | 1523 |
| 2 | M1130-2 | 1260 | 140.2 | 10.16 | 100.6 | 10.04 | 1.98 | 3.51 | 1483 |
| 3 | M1130-3 | 1260 | 140.2 | 10.38 | 100.1 | 10.19 | 0.42 | 1.48 | 1631 |
| - | - | - | - | - | - | - | - | - | - |
| - | - | - | - | - | - | - | - | - | - |
| 55 | M6680-1 | 2668 | 125.5 | 10.14 | 60.5 | 6.11 | 0.37 | 1.52 | 760 |
| 56 | M6680-2 | 2674 | 125.8 | 10.41 | 60.6 | 6.2 | 0.2 | −1.18 | 842 |
| 57 | M6680-3 | 2672 | 125.5 | 10.09 | 60.2 | 6.16 | 1.73 | 1.41 | 735 |
| Min | 925.00 | 125.00 | 10.00 | 60.00 | 6.01 | −3.28 | −2.82 | 735.00 | |
| Average | 2003.86 | 130.94 | 10.16 | 81.46 | 8.25 | 0.32 | 0.81 | 1247.51 | |
| Max | 3314.00 | 141.50 | 10.44 | 101.20 | 10.44 | 3.05 | 3.51 | 1631.00 | |
| Standard deviation | 636.51 | 7.42 | 0.11 | 16.69 | 1.70 | 1.40 | 1.61 | 221.01 |
| Parameters | Value |
|---|---|
| Population size | 25 |
| Length of chromosome | 220 |
| Fitness function | linear ranking |
| Cross-over type | random pair |
| Cross-over probability | 0.4 |
| Number of off-springs | 10 |
| Mutation type | random |
| Mutation probability | 0.7 |
| Number of mutants | 18 |
| Mutation rate | 0.15 |
| Selection function | fitness proportionate selection (roulette wheel selection) |
| Dataset | Methods | R2 | RMSE (kN) | MAE (kN) | ||
|---|---|---|---|---|---|---|
| Training | ANFIS-GA | 0.899 | 68.711 | 53.824 | 0.490 | 6.832 |
| ANFIS-PSO | 0.937 | 54.437 | 40.143 | 0.038 | 5.596 | |
| Testing | ANFIS-GA | 0.916 | 65.371 | 48.588 | 0.540 | 6.538 |
| ANFIS-PSO | 0.929 | 60.522 | 44.044 | −0.101 | 5.844 |
| Criteria | Methods | Average | StD | Mopt |
|---|---|---|---|---|
| R2 | ANFIS-GA | 0.905 | 0.051 | 170 |
| ANFIS-PSO | 0.910 | 0.047 | 170 | |
| RMSE | ANFIS-GA | 65.247 | 13.199 | 100 |
| ANFIS-PSO | 62.986 | 12.679 | 100 | |
| MAE | ANFIS-GA | 49.318 | 10.887 | 120 |
| ANFIS-PSO | 47.629 | 10.343 | 120 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le, L.M.; Ly, H.-B.; Pham, B.T.; Le, V.M.; Pham, T.A.; Nguyen, D.-H.; Tran, X.-T.; Le, T.-T. Hybrid Artificial Intelligence Approaches for Predicting Buckling Damage of Steel Columns Under Axial Compression. Materials 2019, 12, 1670. https://doi.org/10.3390/ma12101670
Le LM, Ly H-B, Pham BT, Le VM, Pham TA, Nguyen D-H, Tran X-T, Le T-T. Hybrid Artificial Intelligence Approaches for Predicting Buckling Damage of Steel Columns Under Axial Compression. Materials. 2019; 12(10):1670. https://doi.org/10.3390/ma12101670
Chicago/Turabian StyleLe, Lu Minh, Hai-Bang Ly, Binh Thai Pham, Vuong Minh Le, Tuan Anh Pham, Duy-Hung Nguyen, Xuan-Tuan Tran, and Tien-Thinh Le. 2019. "Hybrid Artificial Intelligence Approaches for Predicting Buckling Damage of Steel Columns Under Axial Compression" Materials 12, no. 10: 1670. https://doi.org/10.3390/ma12101670