Recursive Local Summation of RX Detection for Hyperspectral Image Using Sliding Windows



Abstract
:
1. Introduction
2. Related Anomaly Detectors
2.1. K-RXD
2.2. L-RXD
2.3. LS-RXD
3. Recursive LS-RXD
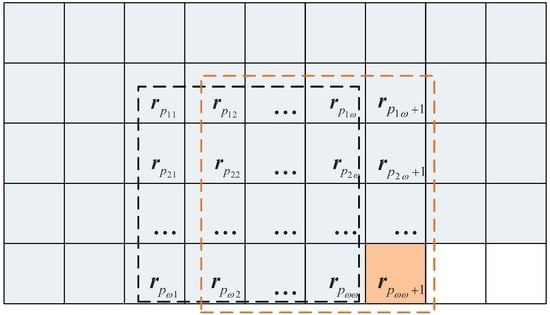
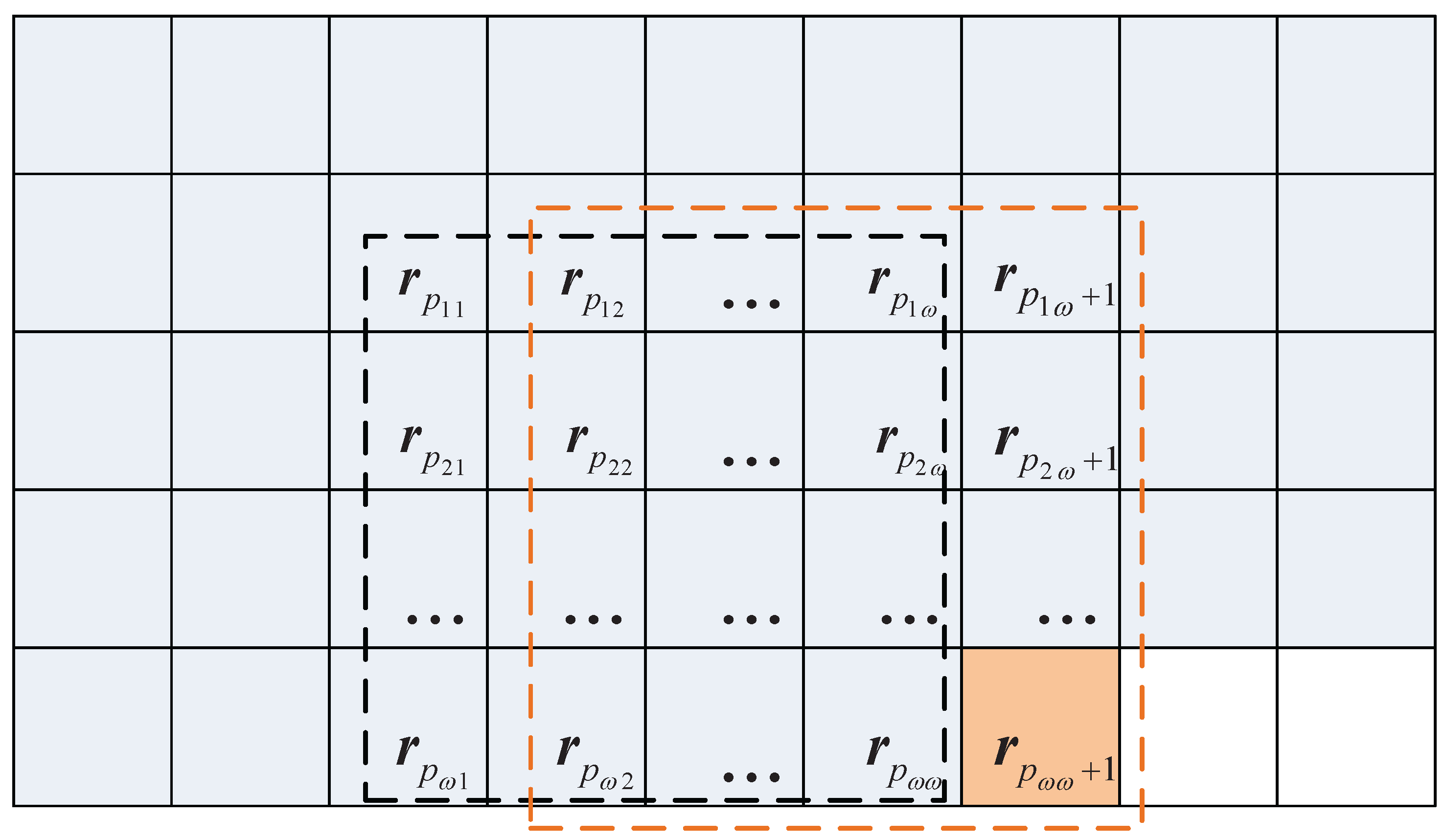
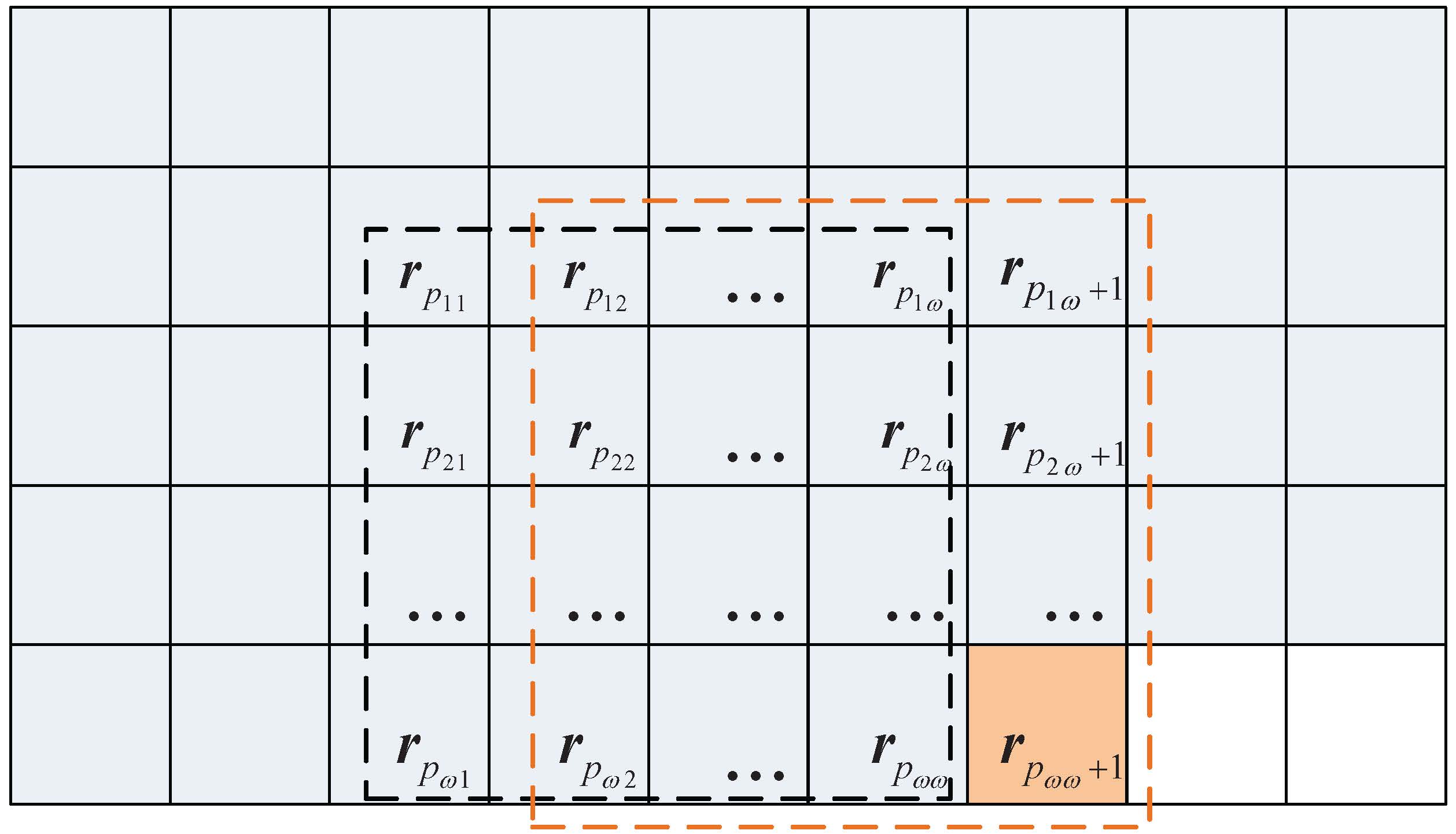
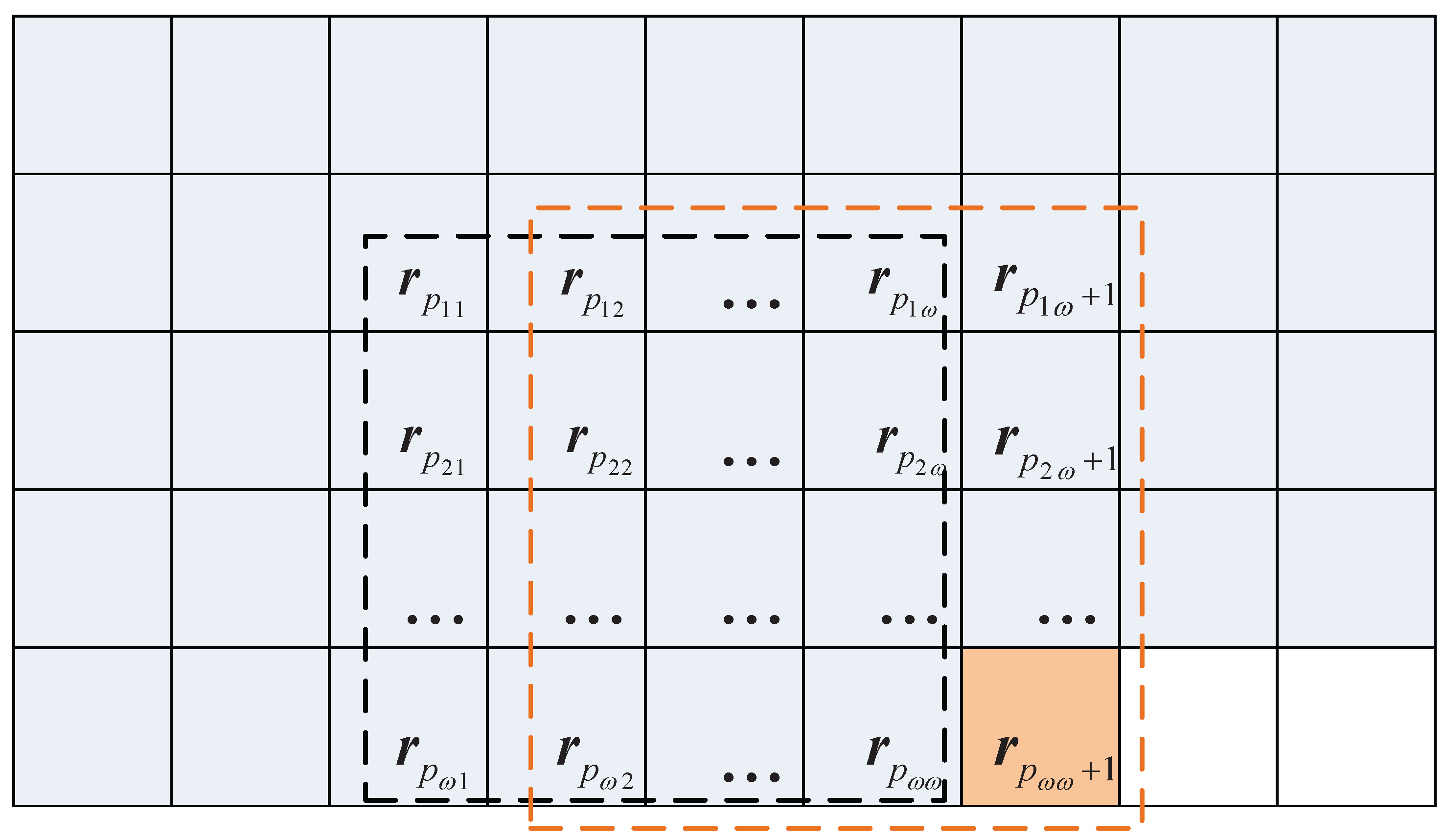
3.1. The Covariance Matrix Inversion of Causal Sliding Array Window
3.2. Recursive Processing of the Covariance Matrix Inversion of Sliding Window
3.3. Recursive Processing of LS-RXD
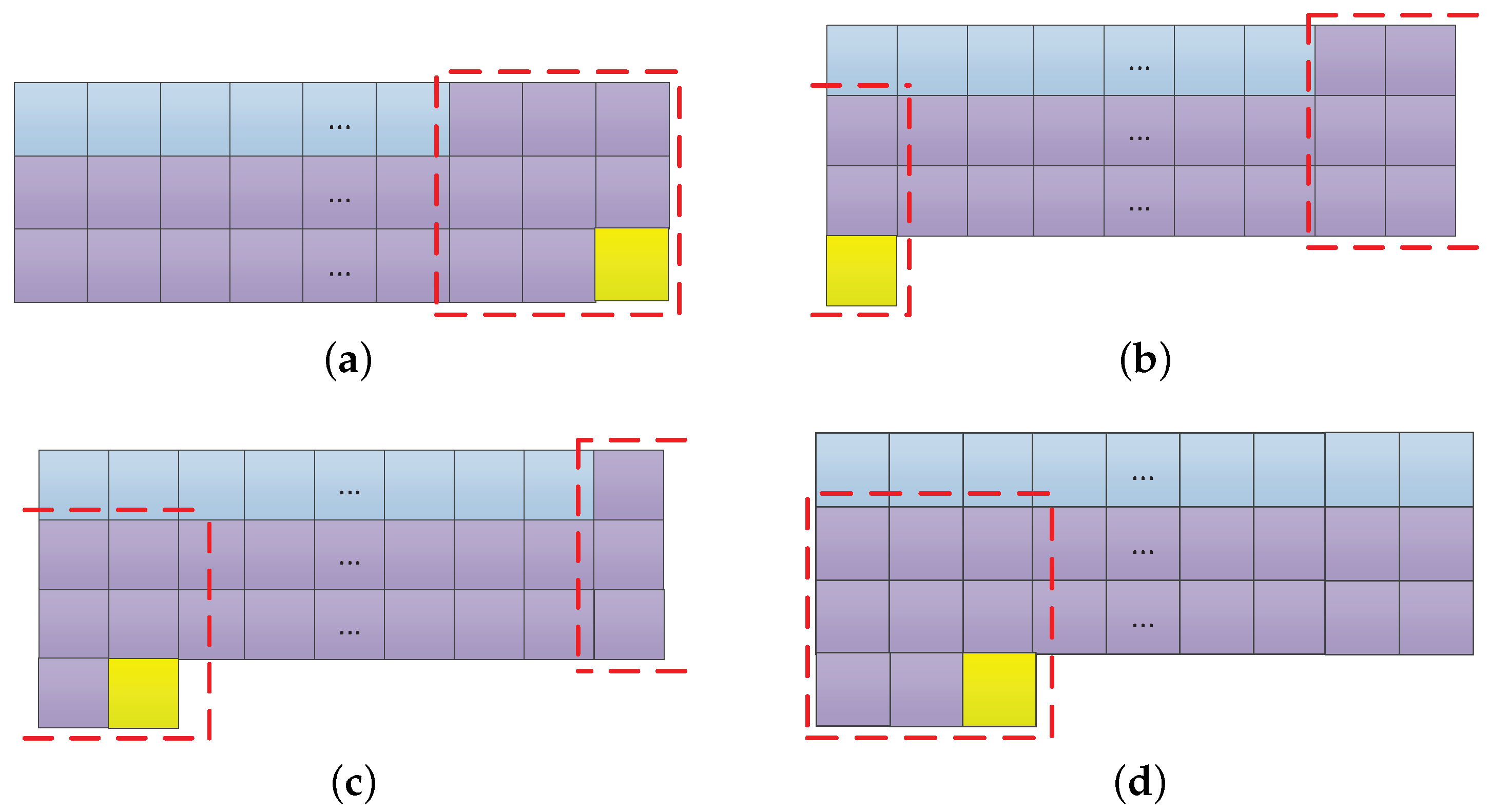
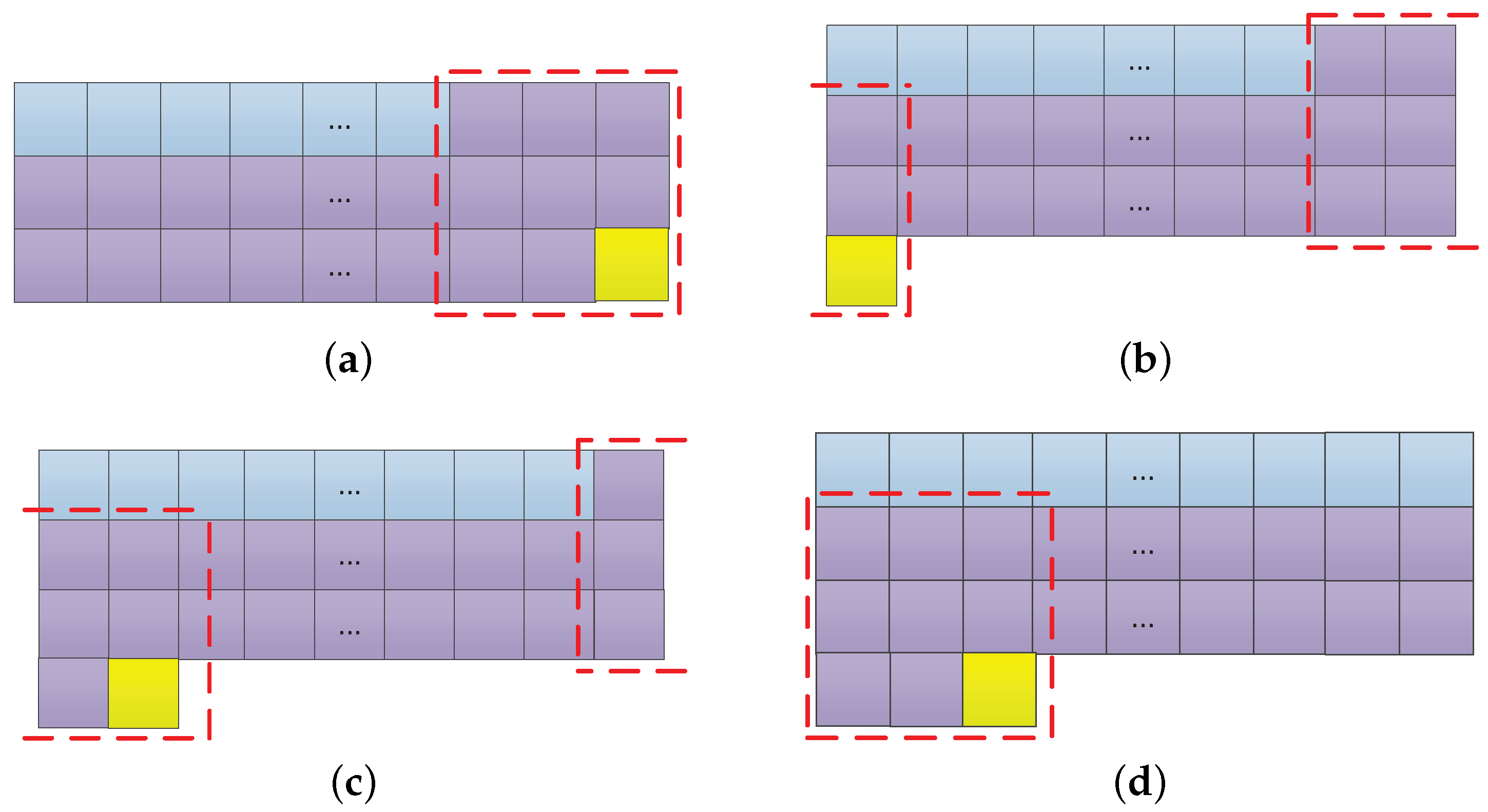
- It is important to note that, using the strategy of Figure 4, the updating counts of the detection value for the pixel located in several top and bottom lines of the image are less than . This will result in the whole detection result being inconsistent. To solve this problem, the updating number of each pixel is counted, which is denoted as , and finally the detection result is obtained as
- The whole design procedure is also suitable for recursive L-RXD which is not included here.
3.4. Background Suppression of Sliding Windows
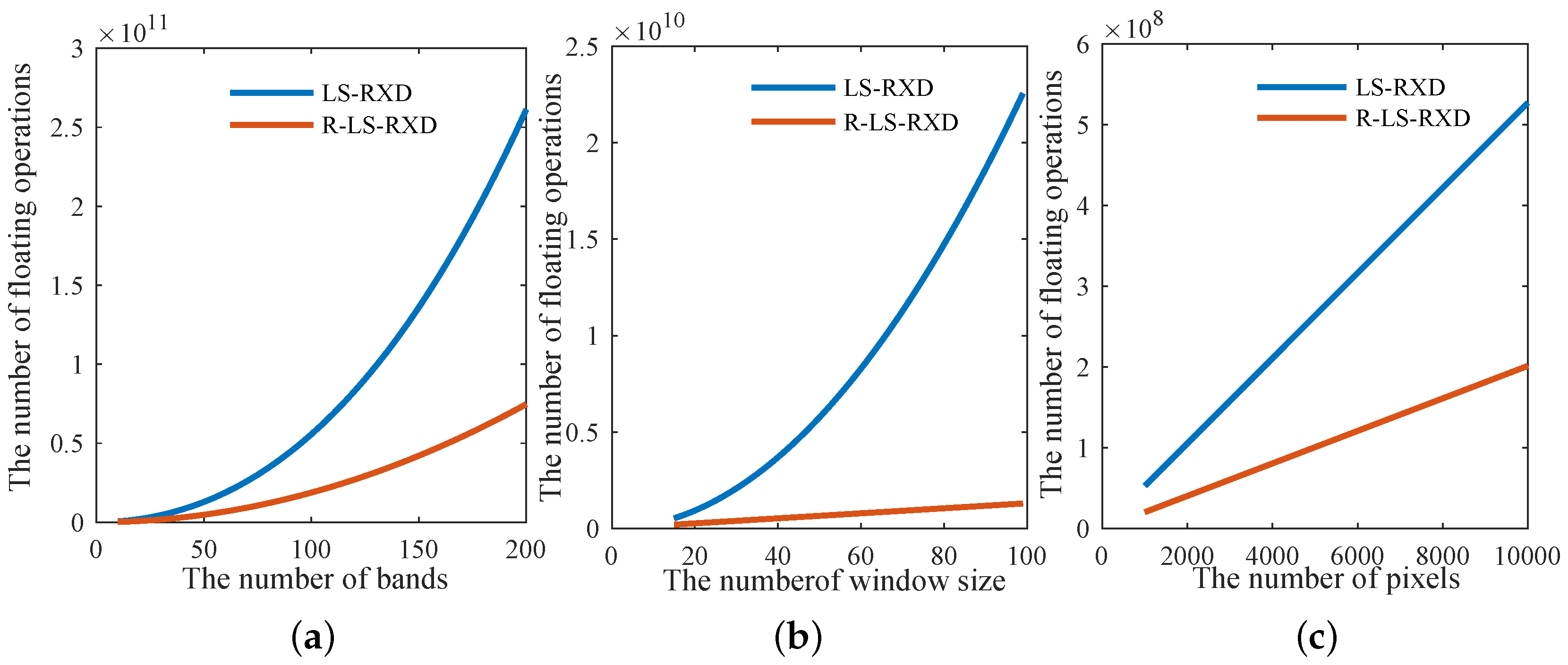
3.5. Computational Complexity Analysis
4. Results and Discussion
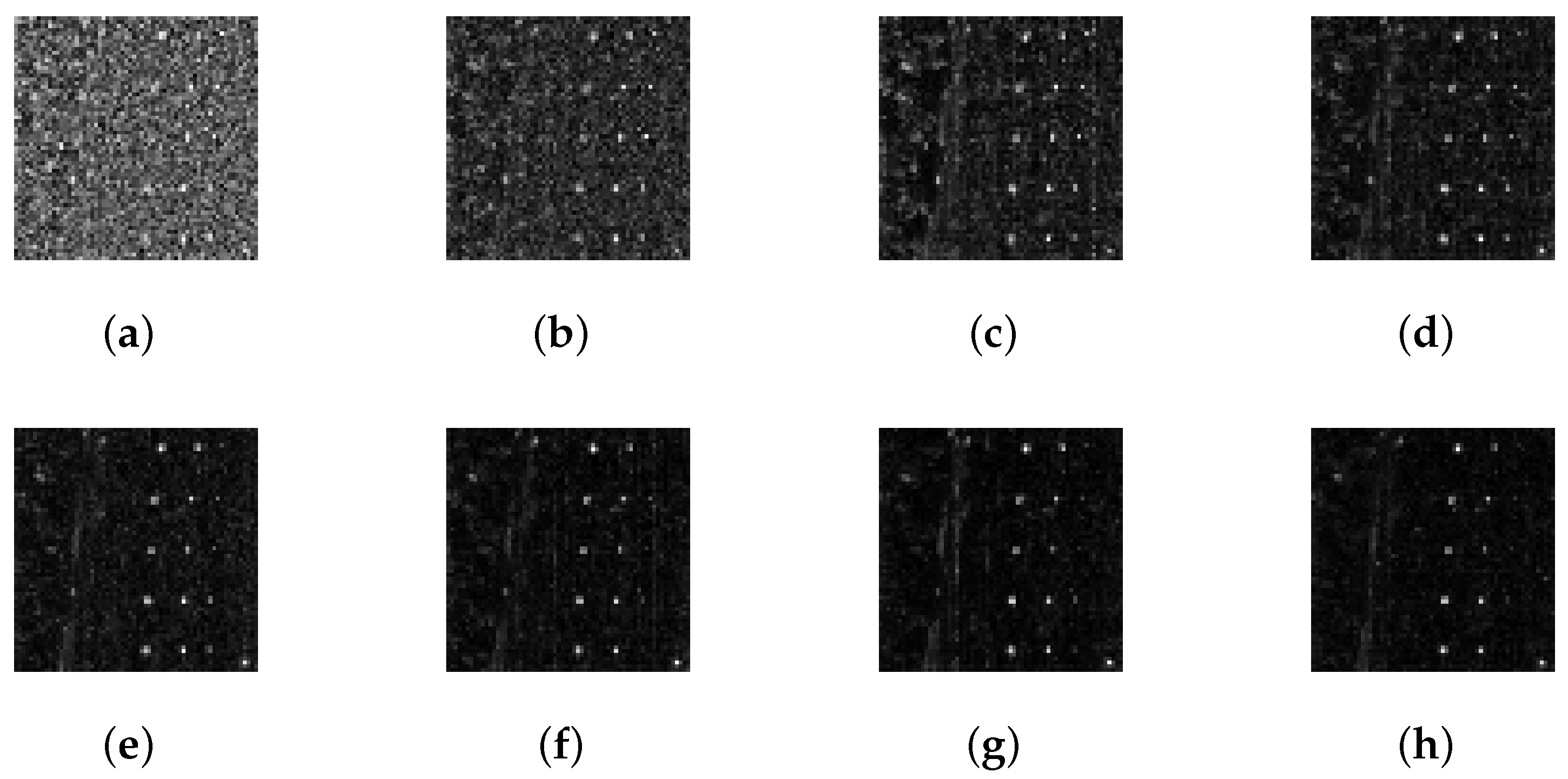
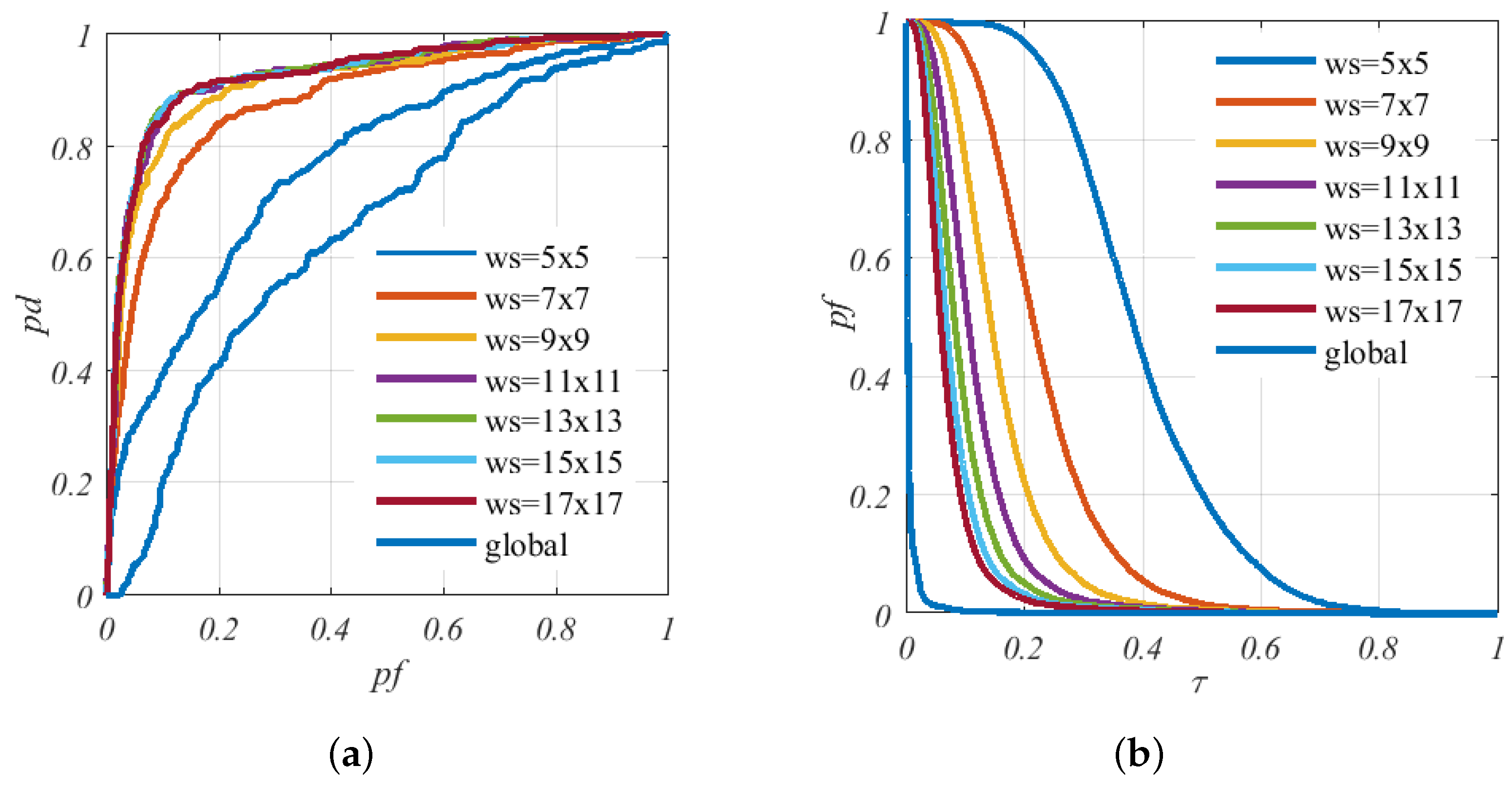
4.1. Optimum Size of Sliding Window
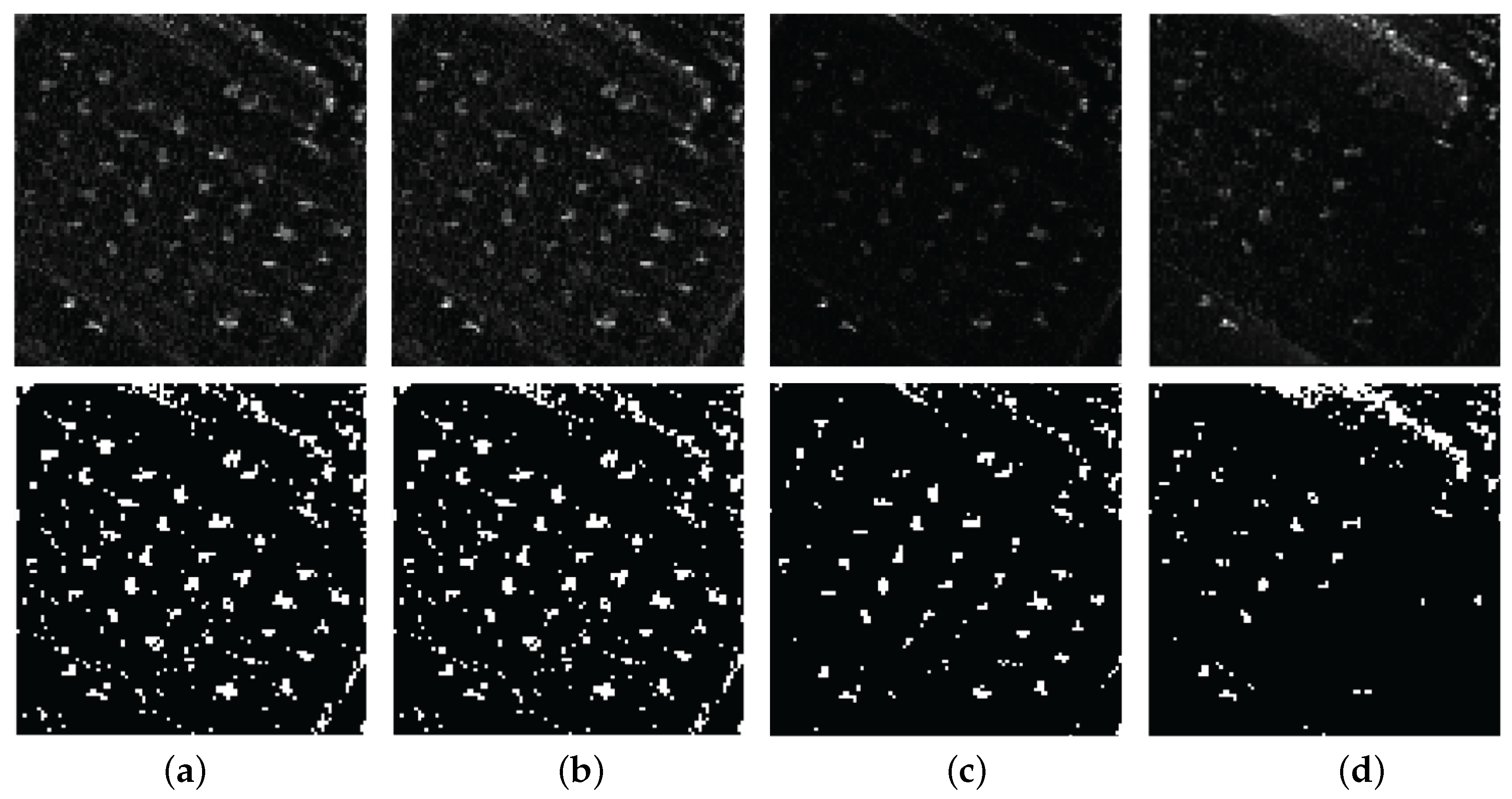
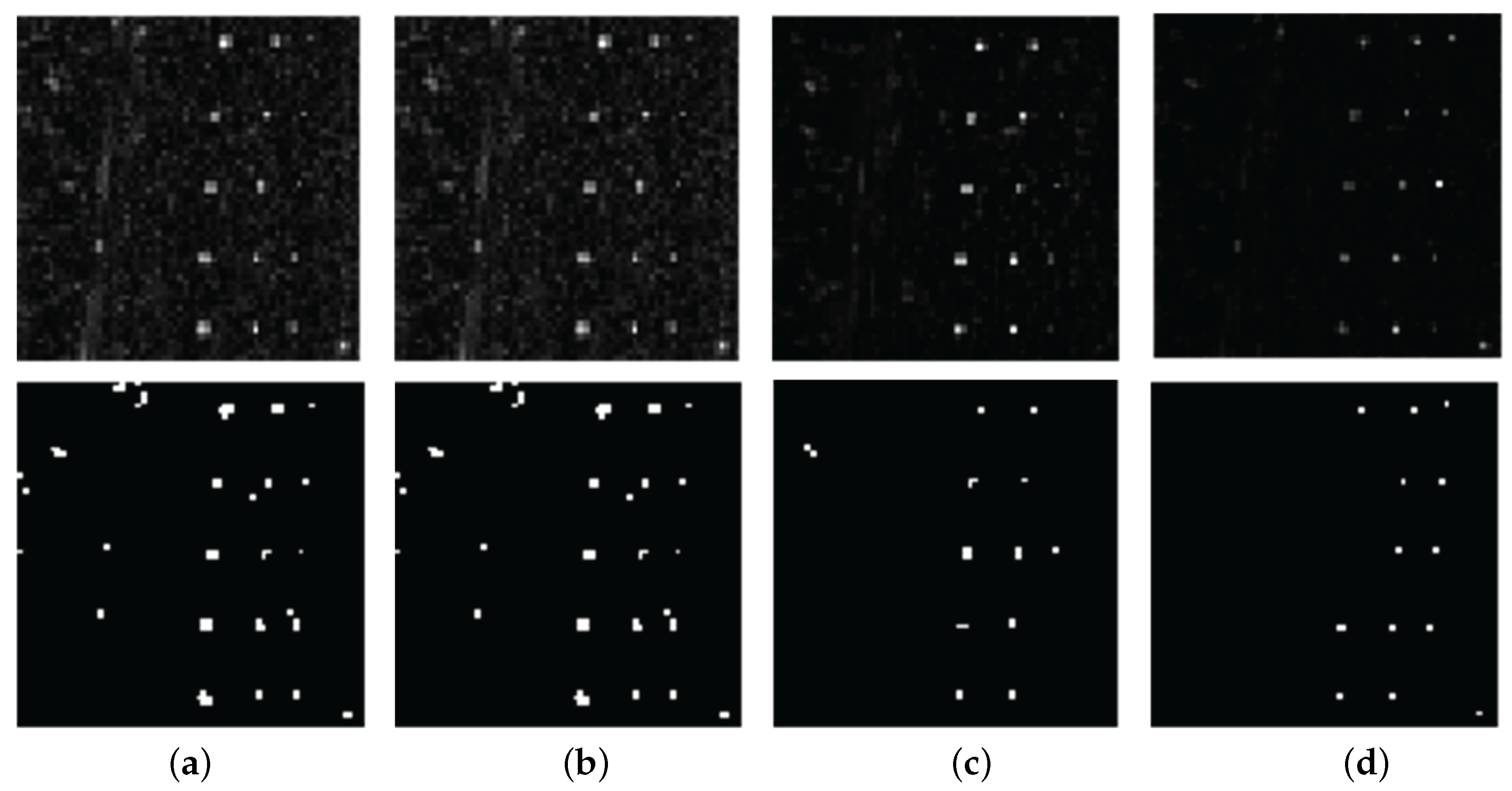
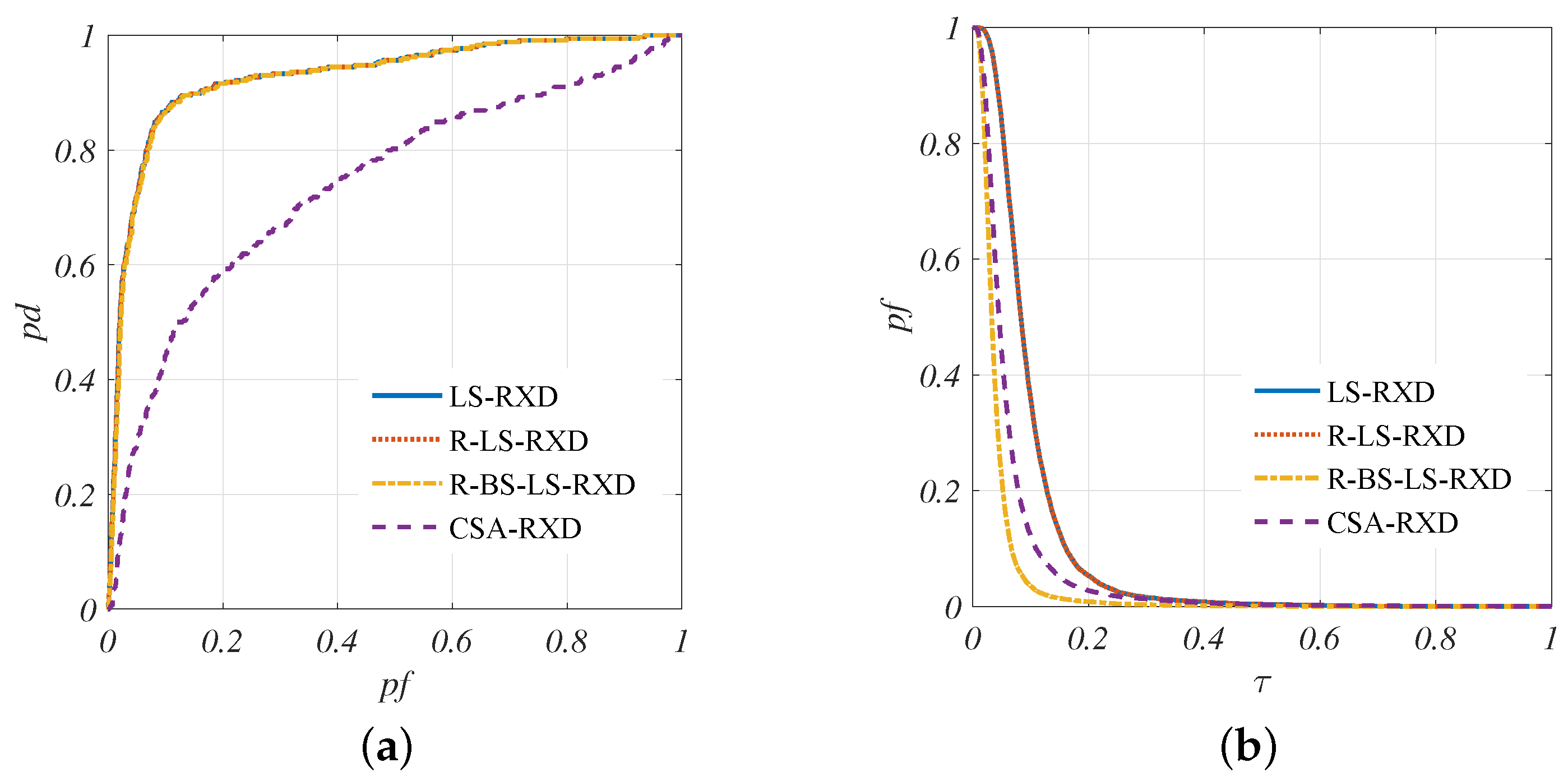
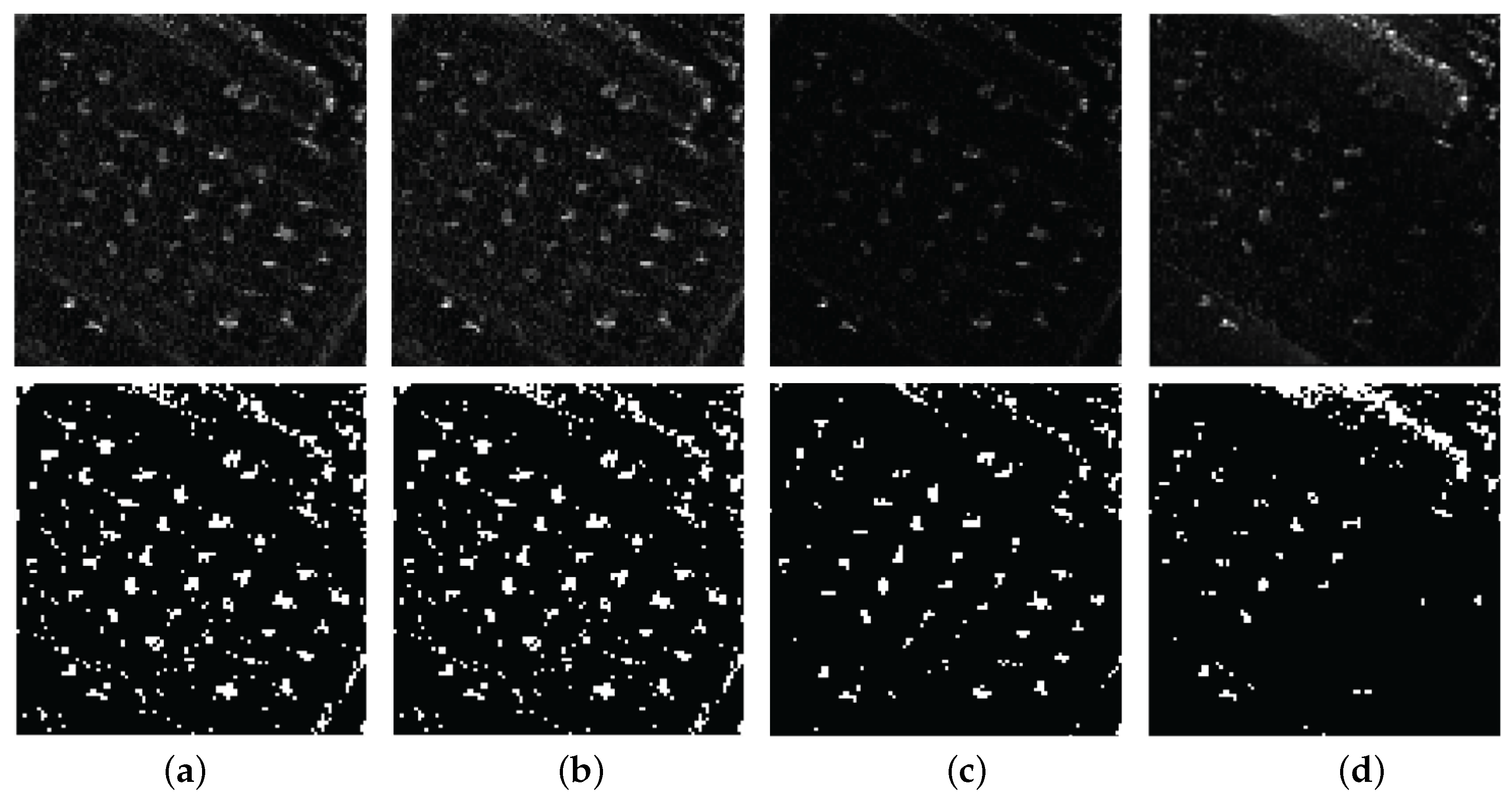
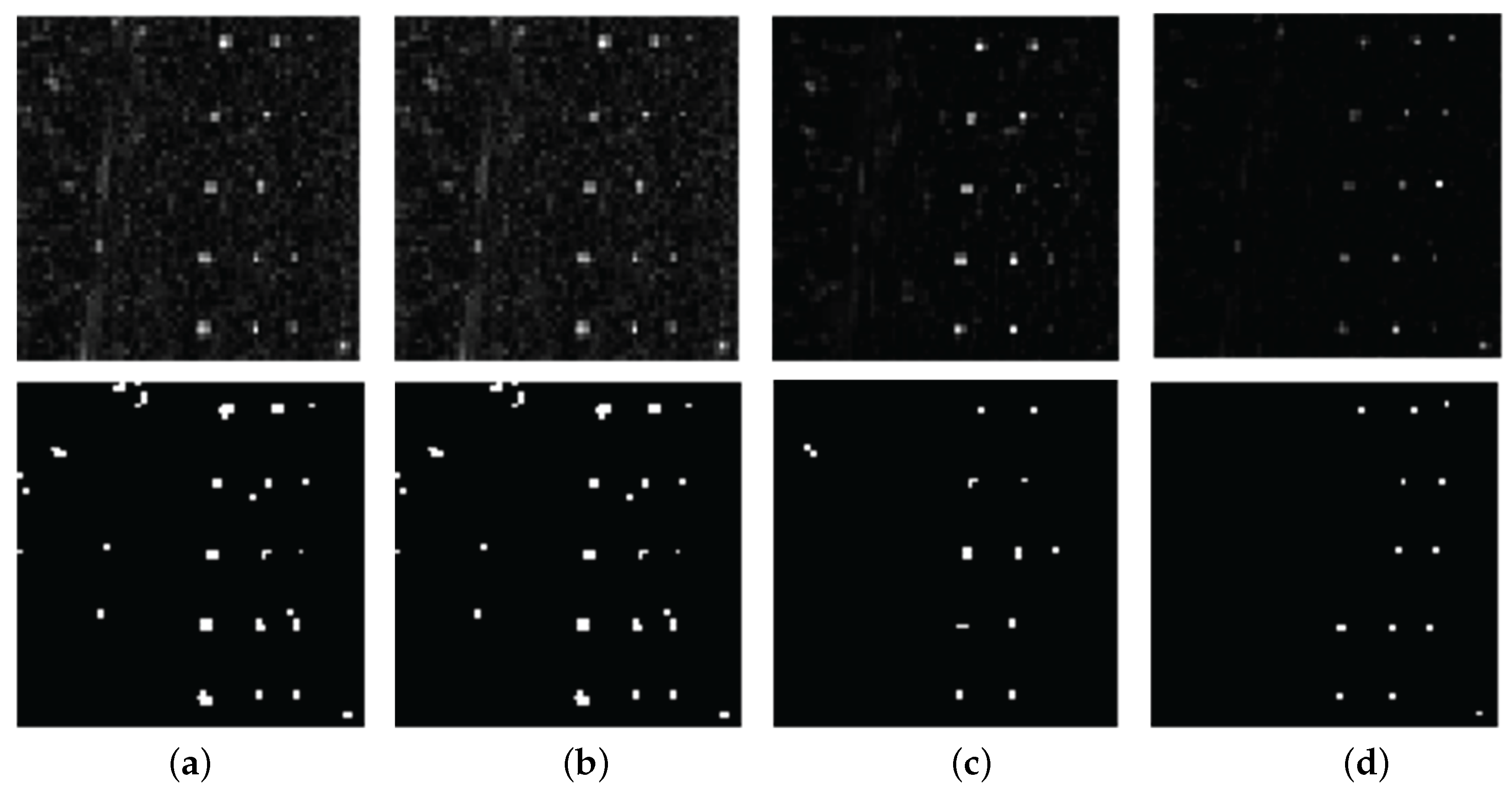
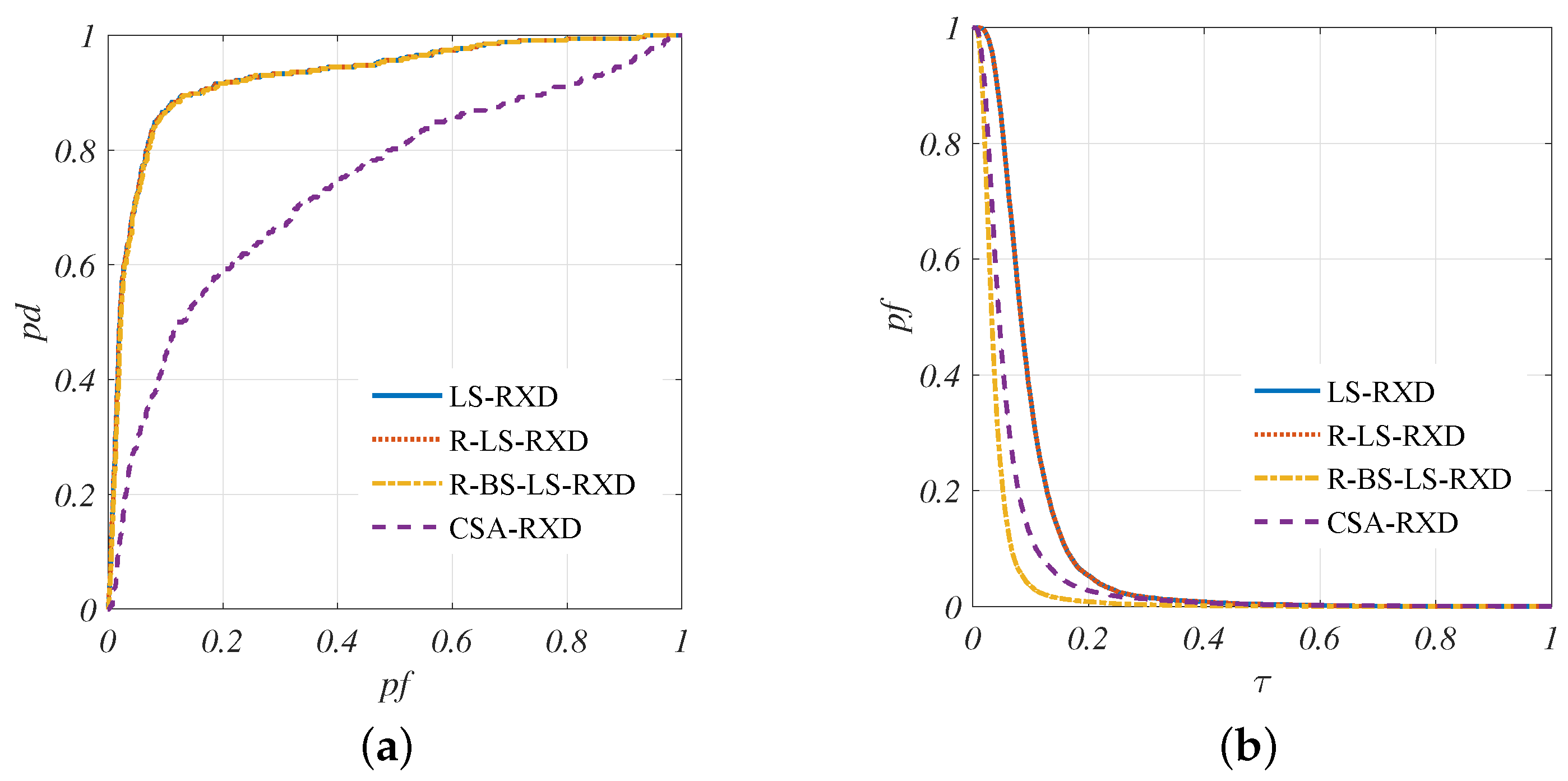
4.2. Performance Evaluation for Different Algorithms
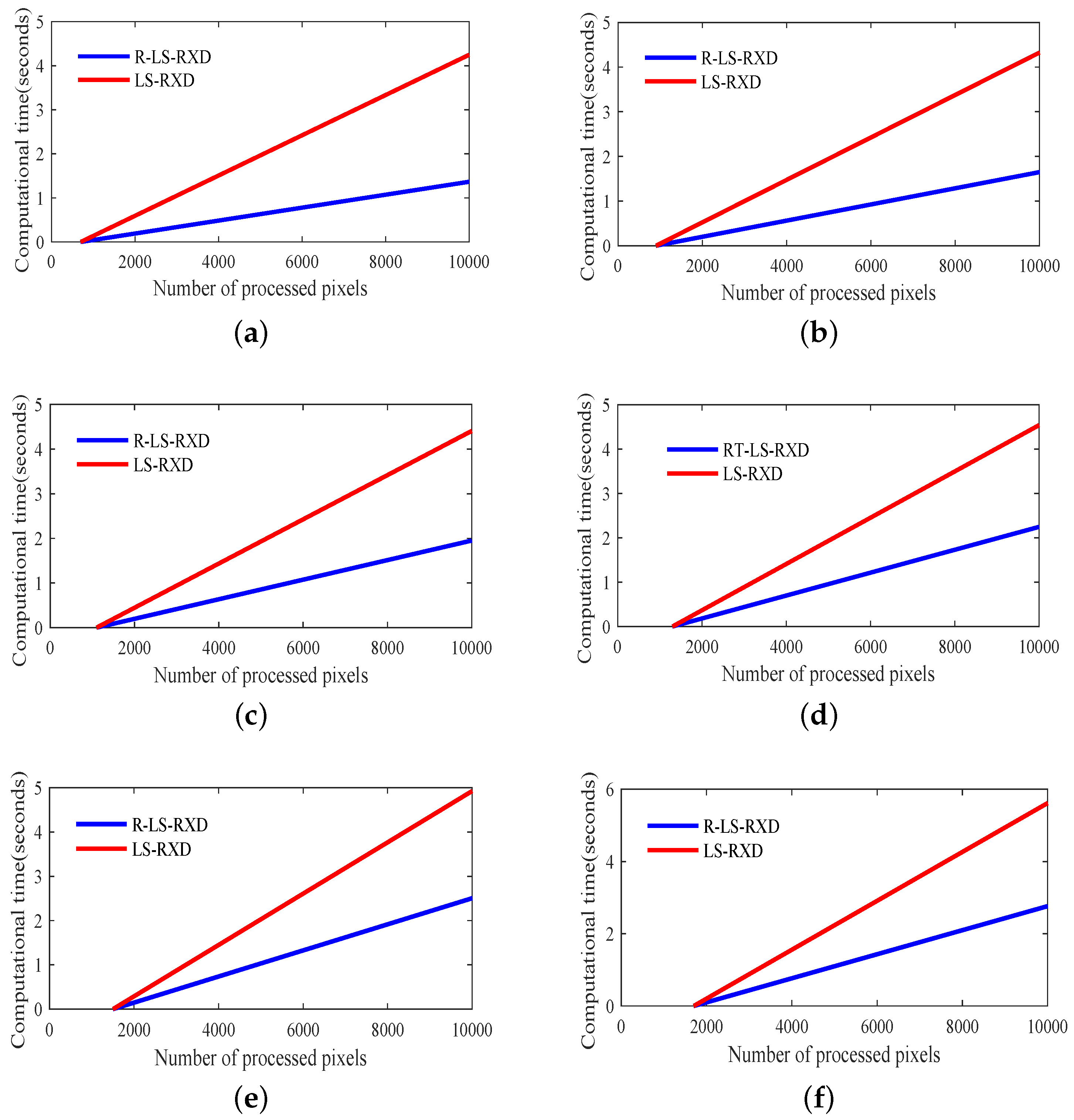
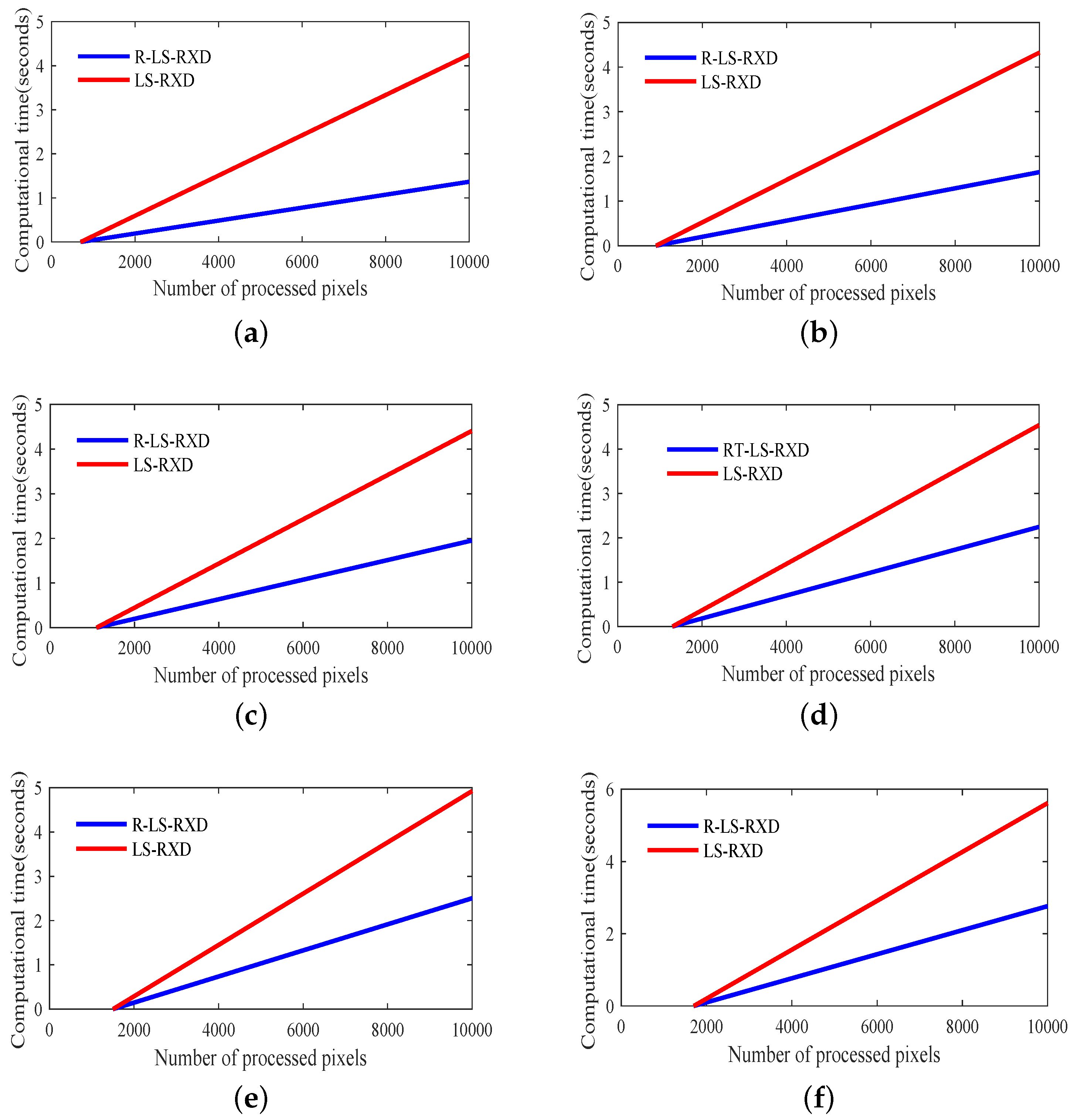
4.3. Computing Time Comparison for Different Algorithms
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Goetz, A.F. Three Decades of Hyperspectral Remote Sensing of The Earth: A Personal View. Remote Sens. Environ. 2009, 113, S5–S16. [Google Scholar] [CrossRef]
- Chang, C.I. Hyperspectral Data Processing: Algorithm Design and Analysis; Wiley-Interscience: Hoboken, NJ, USA, 2013; pp. 441–442. [Google Scholar]
- Reed, I.S.; Yu, X. Adaptive Multiple-band CFAR Detection of An Optical Pattern with Unknown Spectral Distribution. IEEE Trans. Acoust. Speech Sign. Proc. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Nasrabadi, N.M. Hyperspectral Target Detection: An Overview of Current and Future Challenges. IEEE Sign. Proc. Mag. 2014, 31, 34–44. [Google Scholar] [CrossRef]
- Manolakis, D.; Truslow, E.; Pieper, M.; Cooley, T.; Brueggeman, M. Detection Algorithms in Hyperspectral Imaging Systems: An Overview of Practical Algorithms. IEEE Sign. Proc. Mag. 2014, 31, 24–33. [Google Scholar] [CrossRef]
- Li, W.; Du, Q. Collaborative Representation for Hyperspectral Anomaly Detection. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1463–1474. [Google Scholar] [CrossRef]
- Chang, C.I.; Chiang, S.S. Anomaly Detection and Classification for Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1314–1325. [Google Scholar] [CrossRef]
- Chang, C.; Hsueh, M. Characterization of Anomaly Detection in Hyperspectral Imagery. Sensor Rev. 2006, 26, 137–146. [Google Scholar] [CrossRef]
- Molero, J.M.; Garzón, E.M.; García, I.; Plaza, A. Analysis and Optimizations of Global and Local Versions of the RX Algorithm for Anomaly Detection in Hyperspectral Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 801–814. [Google Scholar] [CrossRef]
- Liu, W.M.; Chang, C.I. Multiple-Window Anomaly Detection for Hyperspectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 644–658. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, B.; Ran, Q.; Gao, L.; Li, J.; Plaza, A. Weighted-RXD and Linear Filter-Based RXD: Improving Background Statistics Estimation for Anomaly Detection in Hyperspectral Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2351–2366. [Google Scholar] [CrossRef]
- REN, X.D.; LEI, W.H. Kernel Anomaly Detection Method in Hyperspectral Imagery Based on the Spectral Discrimination Method. Acta Photonica Sin. 2016, 45, 330003. [Google Scholar]
- Du, B.; Zhao, R.; Zhang, L.P.; Zhang, L.F. A Spectral-spatial Based Local Summation Anomaly Detection Method for Hyperspectral Images. Sign. Proc. 2016, 124, 115–131. [Google Scholar] [CrossRef]
- Chen, S.Y.; Wang, Y.L.; Wu, C.C.; Liu, C.; Chang, C.I. Real-time Causal Processing of Anomaly Detection for Hyperspectral Imagery. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1511–1534. [Google Scholar] [CrossRef]
- Zhao, C.H.; Wang, Y.L.; Qi, B.; Wang, J. Global and Local Real-Time Anomaly Detectors for Hyperspectral Remote Sensing Imagery. Remote Sens. 2015, 7, 3966–3985. [Google Scholar] [CrossRef]
- Yang, B.; Yang, M.; Plaza, A.; Gao, L.; Zhang, B. Dual-Mode FPGA Implementation of Target and Anomaly Detection Algorithms for Real-Time Hyperspectral Imaging. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 2950–2961. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, B.; Zhang, F.; Wang, L.; Zhang, H.; Zhang, P.; Tong, Q. Fast Real-Time Causal Linewise Progressive Hyperspectral Anomaly Detection via Cholesky Decomposition. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4614–4629. [Google Scholar] [CrossRef]
- Chang, C.I.; Wang, Y.; Chen, S.Y. Anomaly Detection Using Causal Sliding Windows. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3260–3270. [Google Scholar] [CrossRef]
- Zhao, C.H.; Deng, W.W.; Yao, X.F. Hyperspectral Real-Time Anomaly Target Detection Based on Progressive Line Processing. Acta Opt. Sin. 2017, 37, 012800201–012800212. [Google Scholar]
- Kailath, T. Linear Systems; Prentice-Hall: Upper Saddle River, NJ, USA, 1980; Volume 26, pp. 1–28. [Google Scholar]
- Wang, Y.L.; Chen, S.Y.; Liu, C.H.; Chang, C.N. Background Suppression Issues in Anomaly Detection for Hyperspectral Imagery. In Proceedings of the Satellite Data Compression, Communications, and Processing X (SPIE), Baltimore, ML, USA, 8–9 May 2014; p. 912413. [Google Scholar]
- Wang, L.; Chang, C.I.; Lee, L.C.; Wang, Y.; Xue, B.; Song, M.; Yu, C.; Li, S. Band Subset Selection for Anomaly Detection in Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4887–4898. [Google Scholar] [CrossRef]
- Wang, J.; Wang, L.; Cui, J.; Li, X. Band Selection based on Signal-to-noise Ratio Estimation and Hyperspectral Anomaly Detection. Remote Sens. Technol. Appl. 2015, 30, 292–297. [Google Scholar]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operation | Input | Output | Algorithm | Complexity |
|---|---|---|---|---|
| Matrix multiplication | Matrix a size ; Matrix b size ; | Matrix size | Schoolbook matrix multiplication | |
| Matrix inversion | Matrix size | Matrix size | Gauss-Jordan elimination Strassen algorithm Coppersmith-Winograd algorithm Williams algorithm |
| Algorithm | LS-RXD | R-LS-RXD | ||||||
|---|---|---|---|---|---|---|---|---|
| Operator | Initialization | Input | Input | |||||
| flops | ||||||||
| sum | ||||||||
| Figure 5 | Parameters | ||
|---|---|---|---|
| (a) | 10:5:200 | 15 | 10,000 |
| (b) | 10 | 15:2:99 | 10,000 |
| (c) | 10 | 15 | 1000:1000:10,000 |
| Sensor | Window-Size | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| AVIRIS | (, ) (, ) | 0.7679 0.3461 | 0.8813 0.2059 | 0.9141 0.1389 | 0.9206 0.1086 | 0.9286 0.0873 | 0.9281 0.0752 | 0.9275 0.0648 | 0.6548 0.0080 |
| HYDICE | (, ) (, ) | 0.9895 0.2636 | 0.9973 0.1576 | 0.9985 0.1178 | 0.9988 0.0902 | 0.9988 0.0713 | 0.9986 0.0575 | 0.9982 0.0468 | 0.9878 0.0121 |
| Algorithm | LS-RXD | R-LS-RXD | R-BS-LS-RXD | CSA-RXD |
|---|---|---|---|---|
| (, ) | 0.9286 | 0.9286 | 0.9270 | 0.7401 |
| (, ) | 0.0873 | 0.0873 | 0.0364 | 0.0597 |
| Windowsize | ||||||
|---|---|---|---|---|---|---|
| R-LS-RXD | 1.366 | 1.648 | 1.951 | 2.247 | 2.504 | 2.764 |
| LS-RXD | 4.248 | 4.327 | 4.407 | 4.542 | 4.925 | 5.618 |
| Speedup | 3.110 | 2.627 | 2.259 | 2.022 | 1.967 | 2.033 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Lin, W.; Wang, Y.; Li, X. Recursive Local Summation of RX Detection for Hyperspectral Image Using Sliding Windows. Remote Sens. 2018, 10, 103. https://doi.org/10.3390/rs10010103
Zhao L, Lin W, Wang Y, Li X. Recursive Local Summation of RX Detection for Hyperspectral Image Using Sliding Windows. Remote Sensing. 2018; 10(1):103. https://doi.org/10.3390/rs10010103
Chicago/Turabian StyleZhao, Liaoying, Weijun Lin, Yulei Wang, and Xiaorun Li. 2018. "Recursive Local Summation of RX Detection for Hyperspectral Image Using Sliding Windows" Remote Sensing 10, no. 1: 103. https://doi.org/10.3390/rs10010103