The Impacts of the Ionospheric Observable and Mathematical Model on the Global Ionosphere Model

 , , , , , ,
, , , , , ,
Abstract
:
1. Introduction
2. Methodology
2.1. Slant Total Electron Content Retrieval
2.2. Vertical Total Electron Content Modelling
2.3. Accuracy Assessment of the Ionospheric Observable
2.4. Accuracy Assessment of the Global Ionosphere Model
3. Numerical Results
3.1. Experimental Data and Preprocess Strategy
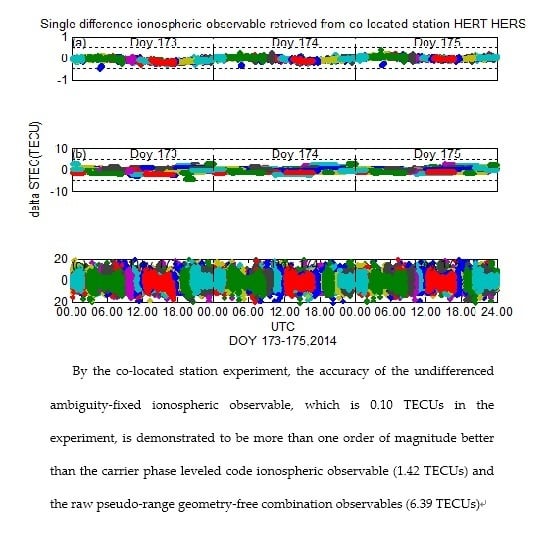
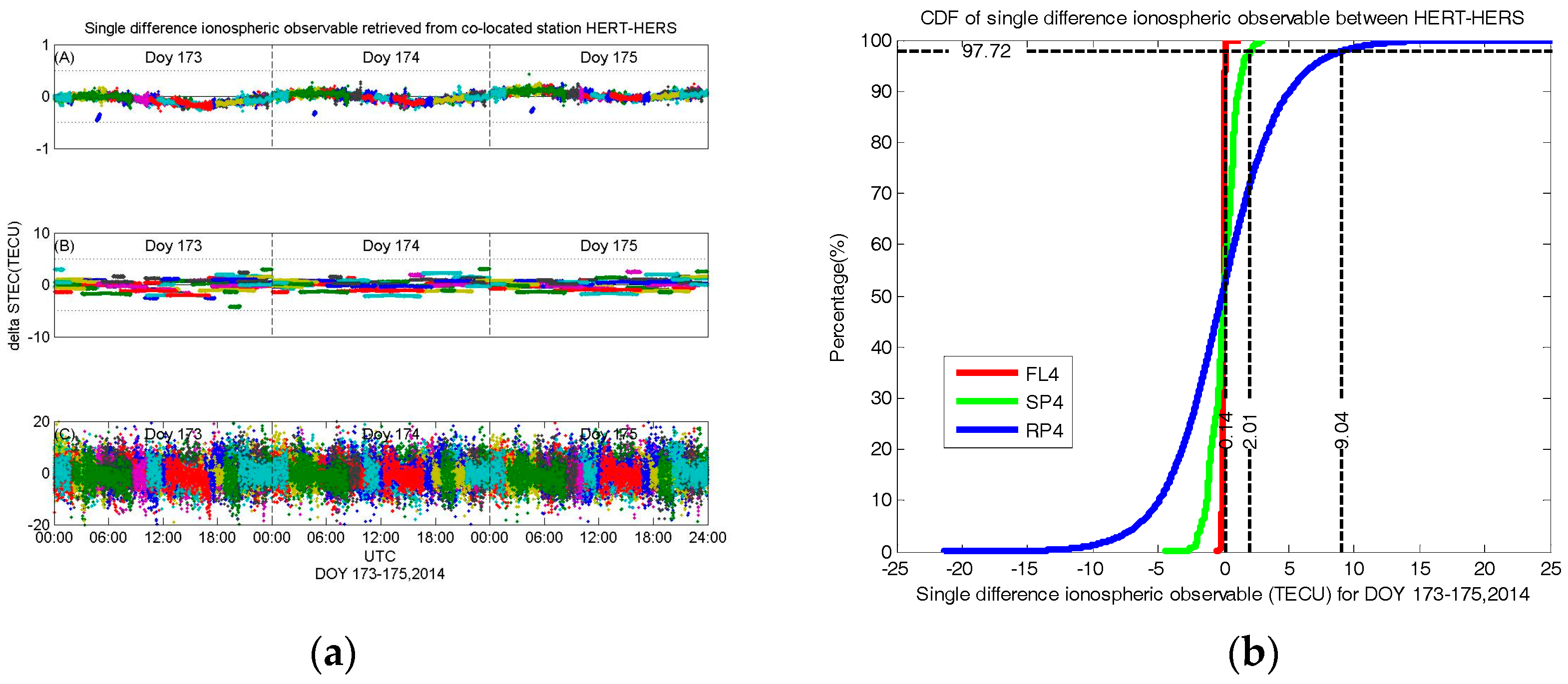
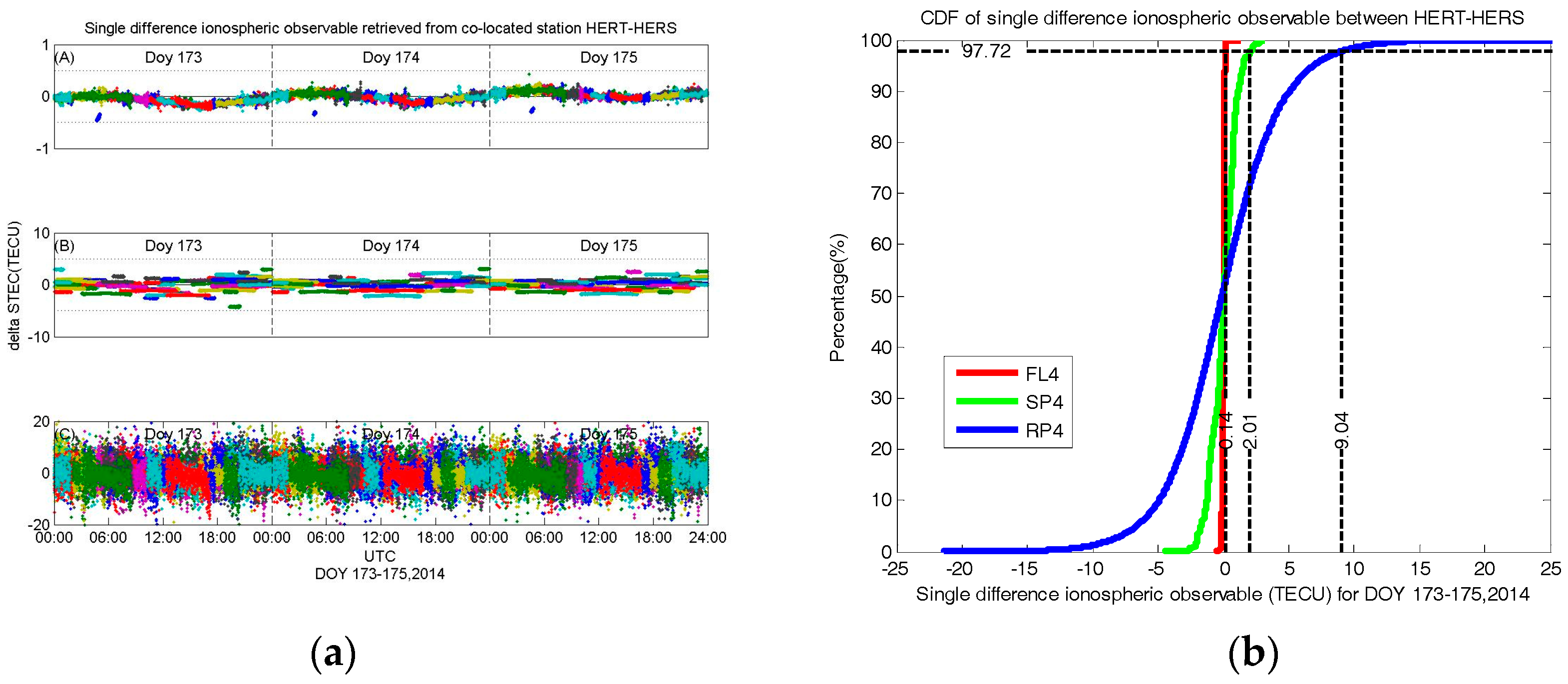
3.2. Accuracy Assessment of the Ionospheric Observable
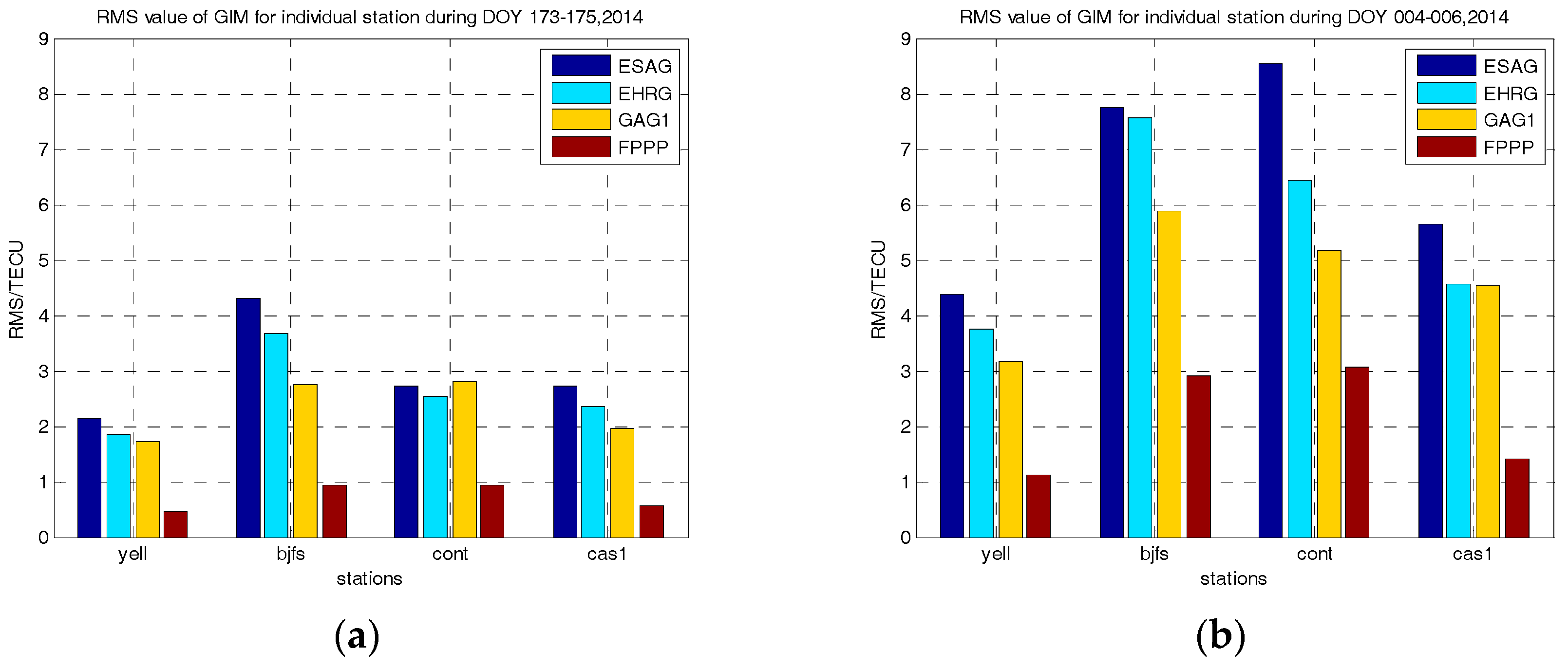
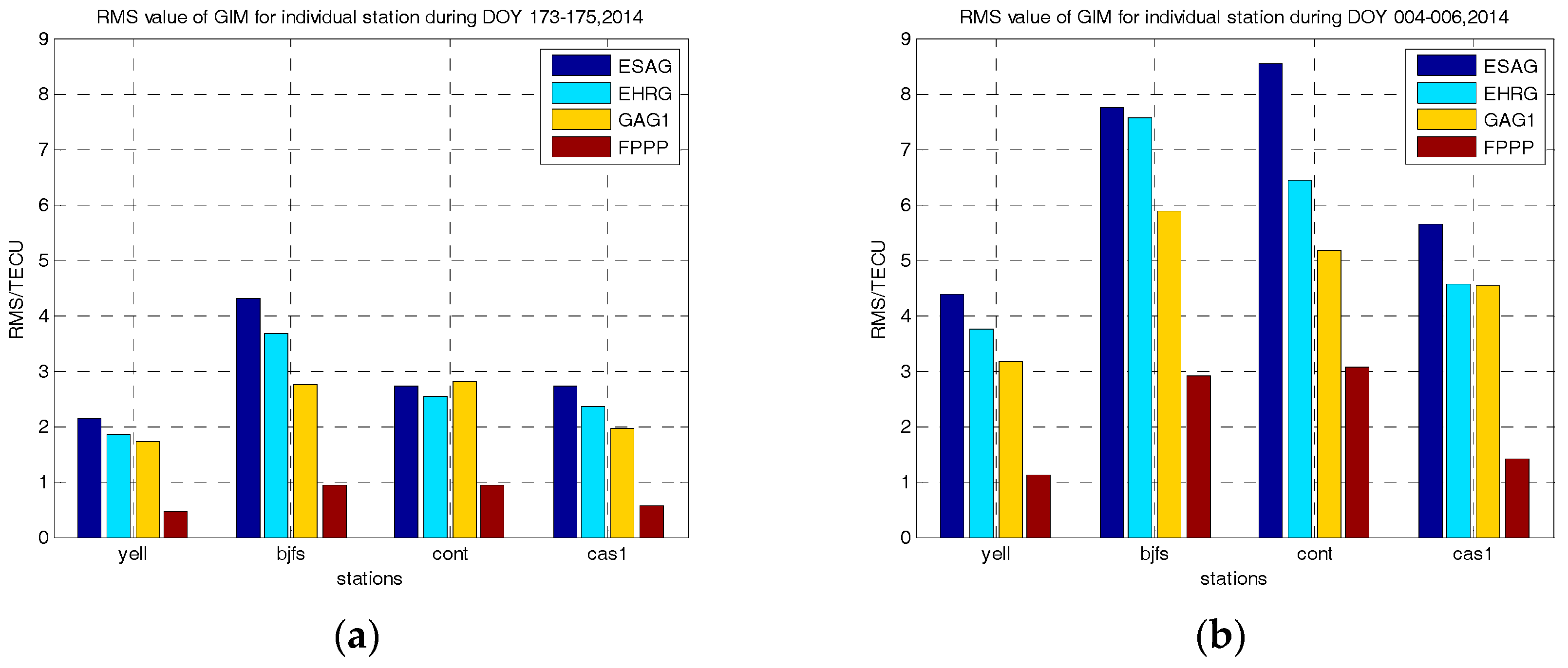
3.3. Accuracy Assessment of the Global Ionosphere Model
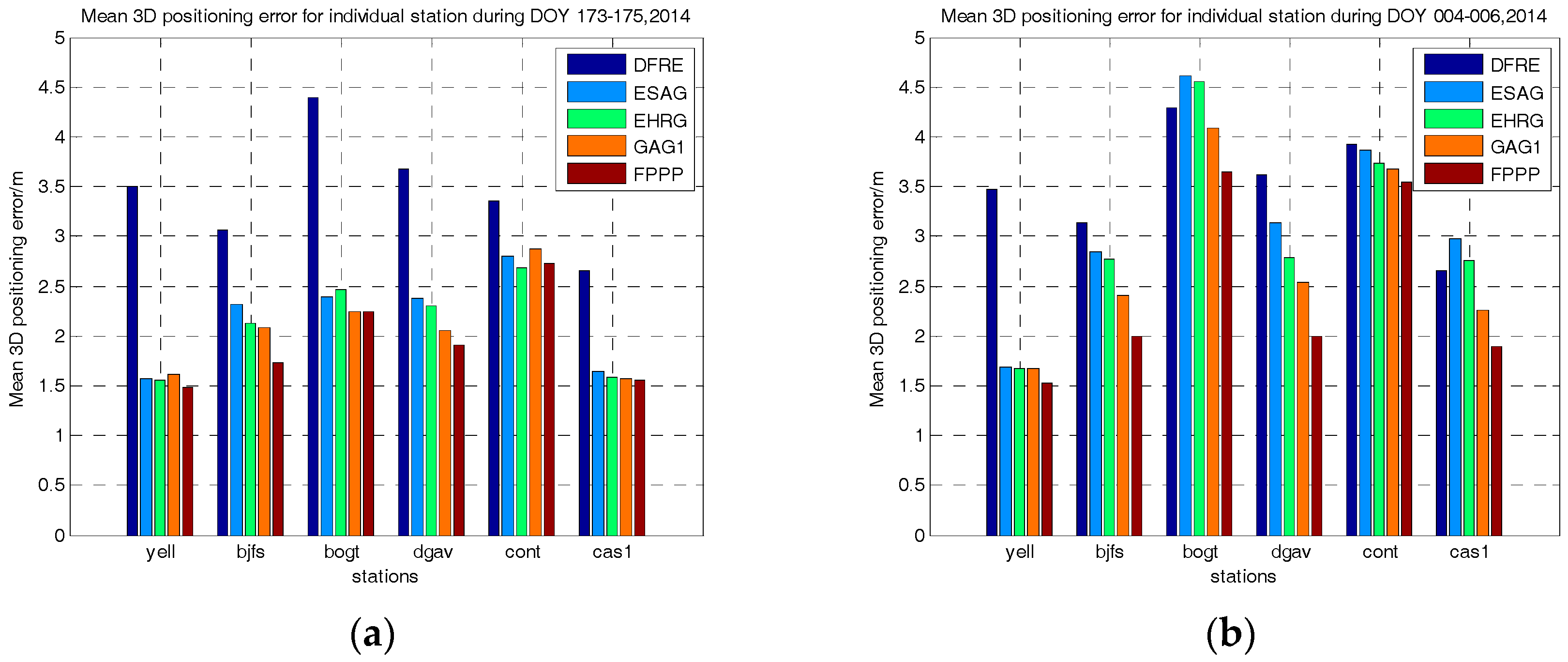
3.4. Single-Frequency Standard Point Positioning Experiment Test
- UCOR. Single-frequency observable (C1), no ionospheric model, and DCB from Navigation Message.
- KLOB. Single-frequency observable (C1), Klobuchar model, and DCB from Navigation Message.
- DFRE. Dual-frequency observable (P3).
- ESAG/EHRG/GAG1/FPPP. Single-frequency observable (C1), corresponding ionospheric model, and DCB from Navigation Message
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hargreaves, J. Principles of Ionosphere; Cambridge University Press: Cambridge, UK, 1992. [Google Scholar]
- Krypiak-Gregorczyk, A.; Wielgosz, P.; Borkowski, A. Ionosphere Model for European Region Based on Multi-GNSS Data and TPS Interpolation. Remote Sens. 2017, 9, 1221. [Google Scholar] [CrossRef]
- Rovira-Garcia, A.; Juan, J.M.; Sanz, J.; González-Casado, G.; Bertran, E. Fast Precise Point Positioning: A System to Provide Corrections for Single and Multi-frequency Navigation. Navigation 2016, 63, 231–247. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Zhang, X.; Ge, M. Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. J. Geodesy 2011, 85, 151–158. [Google Scholar] [CrossRef]
- Li, X. Improving real-time PPP ambiguity resolution with ionospheric characteristic consideration. In Proceedings of the ION GNSS-12, Institute of Navigation, Nashville, TN, USA, 17–21 September 2012. [Google Scholar]
- Geng, J.; Meng, X.; Dodson, A.H.; Ge, M.; Teferle, F.N. Rapid re-convergences to ambiguity-fixed solutions in precise point positioning. J. Geodesy 2010, 84, 705–714. [Google Scholar] [CrossRef]
- Geng, J.; Bock, Y. GLONASS fractional-cycle bias estimation across inhomogeneous receivers for PPP ambiguity resolution. J. Geodesy 2016, 90, 379–396. [Google Scholar] [CrossRef]
- Geng, J.; Shi, C. Rapid initialization of real-time PPP by resolving undifferenced GPS and GLONASS ambiguities simultaneously. J. Geodesy 2017, 91, 361–374. [Google Scholar] [CrossRef]
- Kashani, I.; Wielgosz, P.; Grejner-Brzezinska, D.A. The impact of the ionospheric correction latency on long baseline instantaneous kinematic GPS positioning. Surv. Rev. 2007, 39, 238–251. [Google Scholar] [CrossRef]
- Mohino, E.; Gende, M.; Brunini, C. Improving long baseline (100–300 km) differential GPS positioning applying ionospheric corrections derived from multiple reference stations. J. Surv. Eng. 2007, 133, 1–5. [Google Scholar] [CrossRef]
- Ren, X.; Zhang, X.; Xie, W.; Zhang, K.; Yuan, Y.; Li, X. Global ionospheric modelling using multi-GNSS: BeiDou, Galileo, GLONASS and GPS. Sci. Rep. 2016, 6, 33499. [Google Scholar] [CrossRef] [PubMed]
- Jin, S.; Occhipinti, G.; Jin, R. GNSS ionospheric seismology: Recent observation evidences and characteristics. Earth-Sci. Rev. 2015, 147, 54–64. [Google Scholar] [CrossRef]
- Komjathy, A.; Sparks, L.; Wilson, B.D.; Mannucci, A.J. Automated daily processing of more than 1000 ground-based GPS receivers for studying intense ionospheric storms. Radio Sci. 2005, 40. [Google Scholar] [CrossRef]
- Van Dierendonck, A.J.; Klobuchar, J.; Hua, Q. Ionospheric scintillation monitoring using commercial single frequency C/A code receivers. In Proceedings of the 6th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1993), Salt Lake City, UT, USA, 22–24 September 1993; Volume 93, pp. 1333–1342. [Google Scholar]
- Jakowski, N.; Heise, S.; Wehrenpfennig, A.; Schlüter, S.; Reimer, R. GPS/GLONASS-based TEC measurements as a contributor for space weather forecast. J. Atmos. Sol. Terr. Phys. 2002, 64, 729–735. [Google Scholar] [CrossRef]
- Liu, J.Y.; Chen, Y.I.; Chen, C.H.; Liu, C.Y.; Chen, C.Y.; Nishihashi, M.; Li, J.Z.; Xia, Y.Q.; Oyama, K.I.; Hattori, K.; et al. Seismoionospheric GPS total electron content anomalies observed before the 12 May 2008 Mw7. 9 Wenchuan earthquake. J. Geophys. Res. Space Phys. 2009, 114. [Google Scholar] [CrossRef]
- Savastano, G.; Komjathy, A.; Verkhoglyadova, O.; Mazzoni, A.; Crespi, M.; Wei, Y.; Mannucci, A.J. Real-Time Detection of Tsunami Ionospheric Disturbances with a Stand-Alone GNSS Receiver: A Preliminary Feasibility Demonstration. Sci. Rep. 2017, 7. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Teunissen, P.J.; Yuan, Y. On the short-term temporal variations of GNSS receiver differential phase biases. J. Geodesy 2017, 91, 563–572. [Google Scholar] [CrossRef]
- Wilson, B.D.; Mannucci, A.J. Instrumental biases in ionospheric measurements derived from GPS data. In Proceedings of the 6th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1993), Salt Lake City, UT, USA, 22–24 September 1993; pp. 1343–1351. [Google Scholar]
- Manucci, A.J.; Iijima, B.A.; Lindqwister, U.J.; Pi, X.; Sparks, L.; Wilson, B.D. GPS and ionosphere. In URSI Reviews of Radio Science, 1996–1999; Stone, W.R., Ed.; Jet Propulsion Laboratory: Pasadena, CA, USA, 1999. [Google Scholar]
- Schaer, S. Mapping and Predicting the Earth’s Ionosphere Using the Global Positioning System. Ph.D. Thesis, Astronomical Institute, University of Berne, Bern, Switzerland, 1999. [Google Scholar]
- Manucci, A.J.; Wilson, B.D.; Yuan, D.N.; Ho, C.H.; Lindqwister, U.J.; Runge, T.F. A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci. 1998, 33, 565–582. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Roma, D.D.; Krankowski, A.; Ghoddousi, F.R.; Yuan, Y.; Li, Z.; Zhang, H.; Shi, C.; Feltens, J.; Komjathy, A.; et al. Comparing performances of seven different global VTEC ionospheric models in the IGS context. In Proceedings of the IGS Workshop, Sydney, Australia, 8–12 February 2016; pp. 1–31. [Google Scholar]
- Ciraolo, L.; Azpilicueta, F.; Brunini, C.; Meza, A.; Radicella, S. Calibration errors on experimental slant total electron content (TEC) determined with GPS. J. Geodesy 2007, 81, 111–120. [Google Scholar] [CrossRef]
- Blewitt, G. Carrier phase ambiguity resolution for the global positioning system applied to geodetic baselines up to 2000 km. J. Geophys. Res. 1989, 94, 10187–10203. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, B3, 5005–5017. [Google Scholar] [CrossRef]
- Banville, S.; Zhang, W.; Ghoddousi-Fard, R.; Langley, R.B. Ionospheric Monitoring Using Integer-Levelled Observations. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 2692–2701. [Google Scholar]
- Zhang, B.; Ou, J.; Yuan, Y.; Li, Z. Extraction of line-of-sight ionospheric observables from GPS data using precise point positioning. Sci. China Earth Sci. 2012, 55, 1919–1928. [Google Scholar] [CrossRef]
- Zhang, B. Three methods to retrieve slant total electron content measurements from ground-based GPS receivers and performance assessment. Radio Sci. 2016, 51, 972–988. [Google Scholar] [CrossRef]
- Rovira-Garcia, A.; Juan, J.M.; Sanz, J.; González-Casado, G. A World-Wide Ionospheric Model for Fast Precise Point Positioning. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4596–4604. [Google Scholar] [CrossRef]
- Rovira-Garcia, A.; Juan, J.M.; Sanz, J.; González-Casado, G.; Ibáñez-Segura, D. Accuracy of ionospheric models used in GNSS and SBAS: Methodology and analysis. J. Geodesy 2016, 90, 229–240. [Google Scholar] [CrossRef]
- Bossler, J.D.; Goad, C.C.; Bender, P.L. Using the global positioning system (gps) for geodetic positioning. Bull. Géodésique 1980, 54, 553–563. [Google Scholar] [CrossRef]
- Braasch, M. Multi-path effects. In Global Positioning System: Theory and Applications, Volume 1 (Progress in Astronautics and Aeronautics); Parkinson, B.W., Spilker, J.J., Eds.; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1996; pp. 547–568. [Google Scholar]
- Dow, J.M.; Neilan, R.; Rizos, C. The international GNSS service in a changing landscape of global navigation satellite systems. J. Geodesy 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Laurichesse, D.; Mercier, F. Integer Ambiguity resolution on undifferenced GPS phase measurements and its application to PPP. In Proceedings of the 20th International Technical Meeting of the Satellite Division, Institute of Navigation, Fort Worth, TX, USA, 25–28 September 2007; pp. 839–848. [Google Scholar]
- Collins, P.; Lahaye, F.; Heroux, P.; Bisnath, S. Precise point positioning with ambiguity resolution using the decoupled clock model. In Proceedings of the ION GNSS 2008, Savannah, GA, USA, 25–29 September 2017; pp. 1315–1322. [Google Scholar]
- Ge, M.; Gendt, G.; Dick, G.; Zhang, F.P. Improving carrier-phase ambiguity resolution in global GPS network solutions. J. Geodesy 2005, 79, 103–110. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.; Sanz, J.; Orus, R.; Garcia-Rigo, A.; Feltens, J.; Komjathy, A.; Schaer, S.; Krankowski, A. The IGS VTEC maps: A reliable source of ionospheric information since 1998. J. Geodesy 2009, 83, 263–275. [Google Scholar] [CrossRef]
- Sanz, J.; Juan, J.; Hernández-Pajares, M. GNSS Data Processing, Vol. I: Fundamentals and Algorithms; ESTEC TM-23/1; ESA Communications: Noordwijk, The Netherlands, 2013. [Google Scholar]
- Juan, J.M.; Rius, A.; Hernández-Pajares, M.; Sanz, J. A two-layer model of the ionosphere using Global Positioning System data. Geophys. Res. Lett. 1997, 24, 393–396. [Google Scholar] [CrossRef]
- Brunini, C.; Azpilicueta, F.J. Accuracy assessment of the GPS-based slant total electron content. J. Geodesy 2009, 83, 773–785. [Google Scholar] [CrossRef]
- Øvstedal, O. Absolute positioning with single-frequency GPS receivers. GPS Solut. 2002, 5, 33–44. [Google Scholar] [CrossRef]
- Space Physics Interactive Data Resource (SPIDR). Available online: http://spidr.ngdc.noaa.gov/spidr/dataset.do (accessed on 1 November 2017).
- Covington, A.E. Solar Radio Emission at 10.7 cm, 1947–1968. J. R. Astron. Soc. Can. 1969, 63, 125–132. [Google Scholar]
- Fagundes, P.R.; Pillat, V.G.; Bolzan, M.J.A.; Sahai, Y.; Becker-Guedes, F.; Abalde, J.R.; Aranha, S.L. Observations of F layer electron density profiles modulated by planetary wave type oscillations in the equatorial ionospheric anomaly region. J. Geophys. Res. 2005, 110. [Google Scholar] [CrossRef]
- Hatch, R. The synergism of GPS code and carrier measurements. In Proceedings of the Third International Symposium on Satellite Doppler Positioning at Physical Sciences Laboratory of New Mexico State University, Las Cruces, NM, USA, 8–12 February 1982; Volume 2, pp. 1213–1231. [Google Scholar]
- Melbourne, W.G. The case for ranging in GPS-based geodetic systems. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; p. 1519. [Google Scholar]
- Wubbena, G. Software developments for geodetic positioning with GPS using TI-4100 code and carrier measurements. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; p. 19. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | Receiver Type | Antenna and Radome Type | Location | Baseline Length | |
|---|---|---|---|---|---|
| HERT | LEICA GRX1200GGPRO | LEIAT504GG | NONE | 50.7° N 0.3° E | 136 m |
| HERS | SEPT POLARX3ETR | LEIAR25.R3 | NONE | ||
| DGAR | ASHTECH UZ-12 | ASH701945E_M | NONE | 7.2° S 72.4° E | 0 m |
| DGAV | JAVAD TRE_G3TH | ASH701945E_M | NONE | ||
| THTI | TRIMBLE NETR8 | ASH701945E_M | NONE | 17.5° S 30.4° W | 2548 m |
| FAA1 | SEPT POLARX4 | LEIAR25.R4 | NONE | ||
| SUTH | ASHTECH UZ-12 | ASH701945G_M | NONE | 32.2° S 20.8° E | 0–142 m |
| SUTV | JPS EGGDT | ASH701945G_M | NONE | ||
| SUTM | JAVAD TRE_G3TH | JAV_RINGANT_G3T | NONE | ||
| CONZ | LEICA GRX1200+GNSS | LEIAR25.R3 | LEIT | 36.7° S 107.0° W | 101 m |
| CONT | SEPT POLARX2 | ASH700936E | SNOW | ||
| OUSD | TRIMBLE NETRS | TRM55971.00 | NONE | 45.9° S 170.5° E | 3 m |
| OUS2 | JAVAD TRE_G3TH | JAV_RINGANT_G3T | NONE | ||
| GIM | Math Model | Observable | Temporal Resolution | Spatial Resolution | Layers | Stations | Satellite System |
|---|---|---|---|---|---|---|---|
| ESAG | SH(15 × 15) | SP4 | 2 h | 2.5 × 5.0 | 1 | 300 | G + R |
| EHRG | SH(15 × 15) | SP4 | 1 h | 2.5 × 5.0 | 1 | 225 | G + R |
| GAG1 | SH(15 × 15) | FL4 | 1 h | 2.5 × 5.0 | 1 | 170 | G |
| FPPP | IST | FL4 | 15 min | 2.5 × 2.5 | 2 | 170 | G |
| Number of Case | Solar Activity Level | DOY | F10.7 Index (Flux Units) |
|---|---|---|---|
| 1 | relatively low | 173 to 175, 2014 | 97.3, 95.6 and 96.6 |
| 2 | high | 004 to 006, 2014 | 253.3, 210.3 and 197.2 |
| Station | Lat (Degree) | Lon (Degree) | X (m) | Y (m) | Z (m) |
|---|---|---|---|---|---|
| YELL | 62.48 | −114.48 | −1,224,452.848 | −2,689,216.183 | 5,633,638.285 |
| BJFS | 39.61 | 115.89 | −2,148,744.372 | 4,426,641.216 | 4,044,655.859 |
| BOGT | 4.64 | −74.08 | 1,744,398.920 | −6,116,037.147 | 512,731.834 |
| DGAV | −7.27 | 72.37 | 1,916,269.030 | 6,029,977.619 | −801,719.611 |
| CONT | −36.84 | −73.03 | 1,492,029.566 | −4,887,961.719 | −3,803,554.052 |
| CAS1 | −66.28 | 110.52 | −901,776.138 | 2,409,383.271 | −5,816,748.494 |
| Baseline | Single Difference Ionospheric Observable (TECU) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Station Pairs | FL4 | SP4 | RP4 | ||||||
| Name | Mean | Stdev | Error | Mean | Stdev | Error | Mean | Stdev | Error |
| HERT-HERS | −5.22 | 0.14 | 0.10 | 0.07 | 2.01 | 1.42 | 0.07 | 9.04 | 6.39 |
| DGAR-DGAV | 23.69 | 0.32 | 0.23 | 27.20 | 2.49 | 1.76 | 27.20 | 18.41 | 13.02 |
| THTI-FAA1 | 73.30 | 0.47 | 0.33 | 77.90 | 5.33 | 3.77 | 77.84 | 11.81 | 8.35 |
| SUTH-SUTM | 34.66 | 0.17 | 0.12 | 34.18 | 4.00 | 2.83 | 34.19 | 22.99 | 16.26 |
| SUTH-SUTV | 5.36 | 0.17 | 0.12 | 4.02 | 1.78 | 1.26 | 4.01 | 8.75 | 6.19 |
| SUTM-SUTV | 29.30 | 0.27 | 0.19 | 30.17 | 4.07 | 2.88 | 30.17 | 21.18 | 14.98 |
| CONZ-CONT | −42.12 | 0.50 | 0.35 | −32.88 | 1.71 | 1.21 | −32.90 | 9.72 | 6.87 |
| OUS2-OUSD | 65.17 | 0.18 | 0.13 | 61.51 | 4.21 | 2.98 | 61.49 | 22.13 | 15.65 |
| Stations | UCOR | KLOB | ESAG | EHRG | GAG1 | FPPP |
|---|---|---|---|---|---|---|
| yell | 25.21 | 6.67 | 2.15 | 1.87 | 1.73 | 0.46 |
| bjfs | 34.42 | 9.73 | 4.29 | 3.68 | 2.74 | 0.95 |
| cont | 14.54 | 7.72 | 2.73 | 2.55 | 2.80 | 0.95 |
| cas1 | 9.30 | 13.80 | 2.72 | 2.35 | 1.96 | 0.56 |
| Stations | UCOR | KLOB | ESAG | EHRG | GAG1 | FPPP |
|---|---|---|---|---|---|---|
| yell | 23.73 | 23.87 | 4.39 | 3.75 | 3.18 | 1.12 |
| bjfs | 34.09 | 22.34 | 7.76 | 7.57 | 5.88 | 2.91 |
| cont | 61.43 | 16.57 | 8.55 | 6.43 | 5.18 | 3.06 |
| cas1 | 40.68 | 22.21 | 5.65 | 4.56 | 4.55 | 1.40 |
| Cases | UCOR | KLOB | ESAG | EHRG | GAG1 | FPPP |
|---|---|---|---|---|---|---|
| Case 1 | 20.87 | 9.48 | 2.97 | 2.61 | 2.31 | 0.73 |
| Case 2 | 39.98 | 21.25 | 6.59 | 5.58 | 4.69 | 2.12 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nie, W.; Xu, T.; Rovira-Garcia, A.; Zornoza, J.M.J.; Subirana, J.S.; González-Casado, G.; Chen, W.; Xu, G. The Impacts of the Ionospheric Observable and Mathematical Model on the Global Ionosphere Model. Remote Sens. 2018, 10, 169. https://doi.org/10.3390/rs10020169
Nie W, Xu T, Rovira-Garcia A, Zornoza JMJ, Subirana JS, González-Casado G, Chen W, Xu G. The Impacts of the Ionospheric Observable and Mathematical Model on the Global Ionosphere Model. Remote Sensing. 2018; 10(2):169. https://doi.org/10.3390/rs10020169
Chicago/Turabian StyleNie, Wenfeng, Tianhe Xu, Adrià Rovira-Garcia, José Miguel Juan Zornoza, Jaume Sanz Subirana, Guillermo González-Casado, Wu Chen, and Guochang Xu. 2018. "The Impacts of the Ionospheric Observable and Mathematical Model on the Global Ionosphere Model" Remote Sensing 10, no. 2: 169. https://doi.org/10.3390/rs10020169