Flood Monitoring Using Satellite-Based RGB Composite Imagery and Refractive Index Retrieval in Visible and Near-Infrared Bands


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Data and Methods
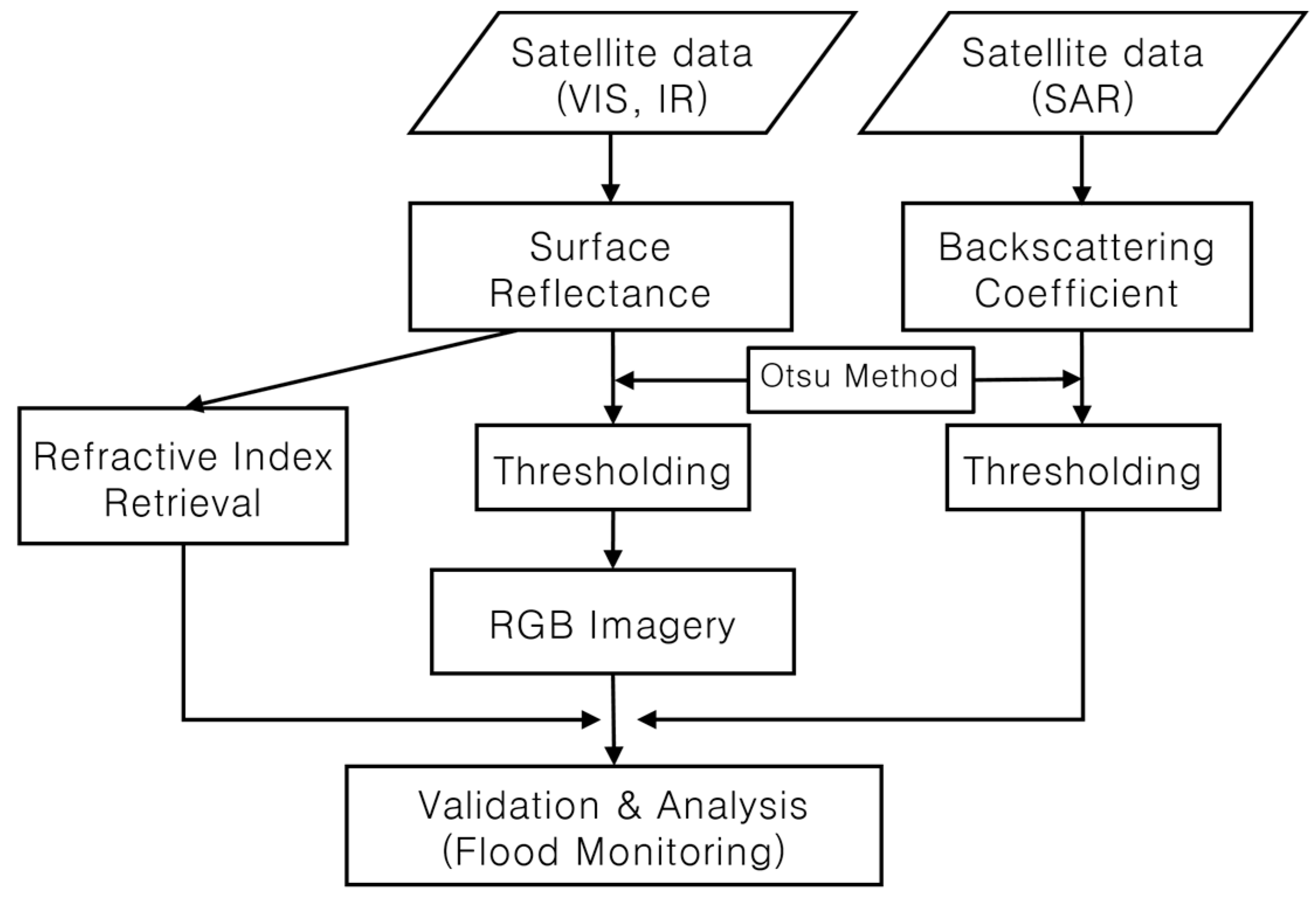
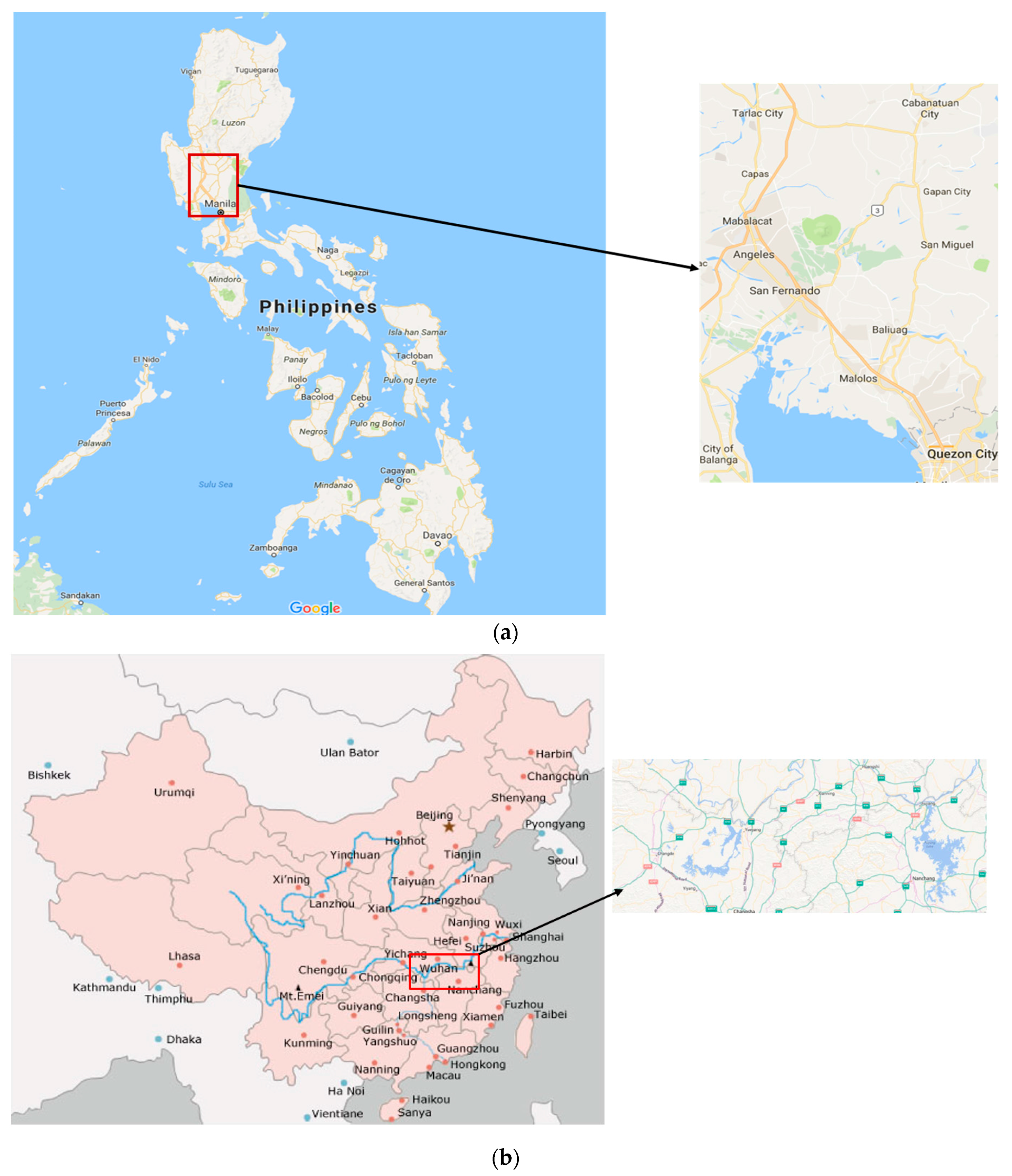
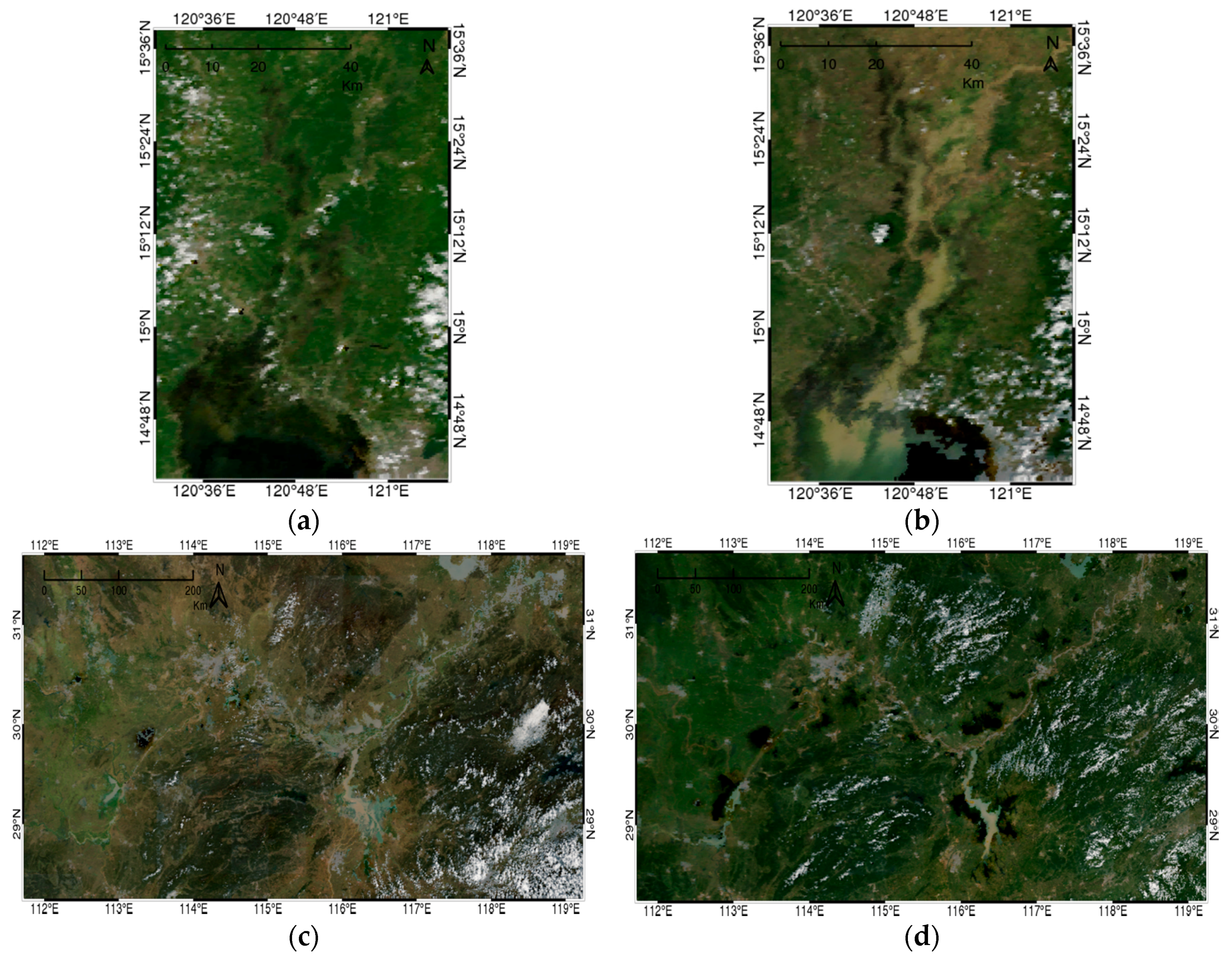
2.1. Data and Procedure
2.2. RGB Composite Technique
2.3. Refractive Index Retrieval
3. Results and Discussion
3.1. RGB Composite Technique
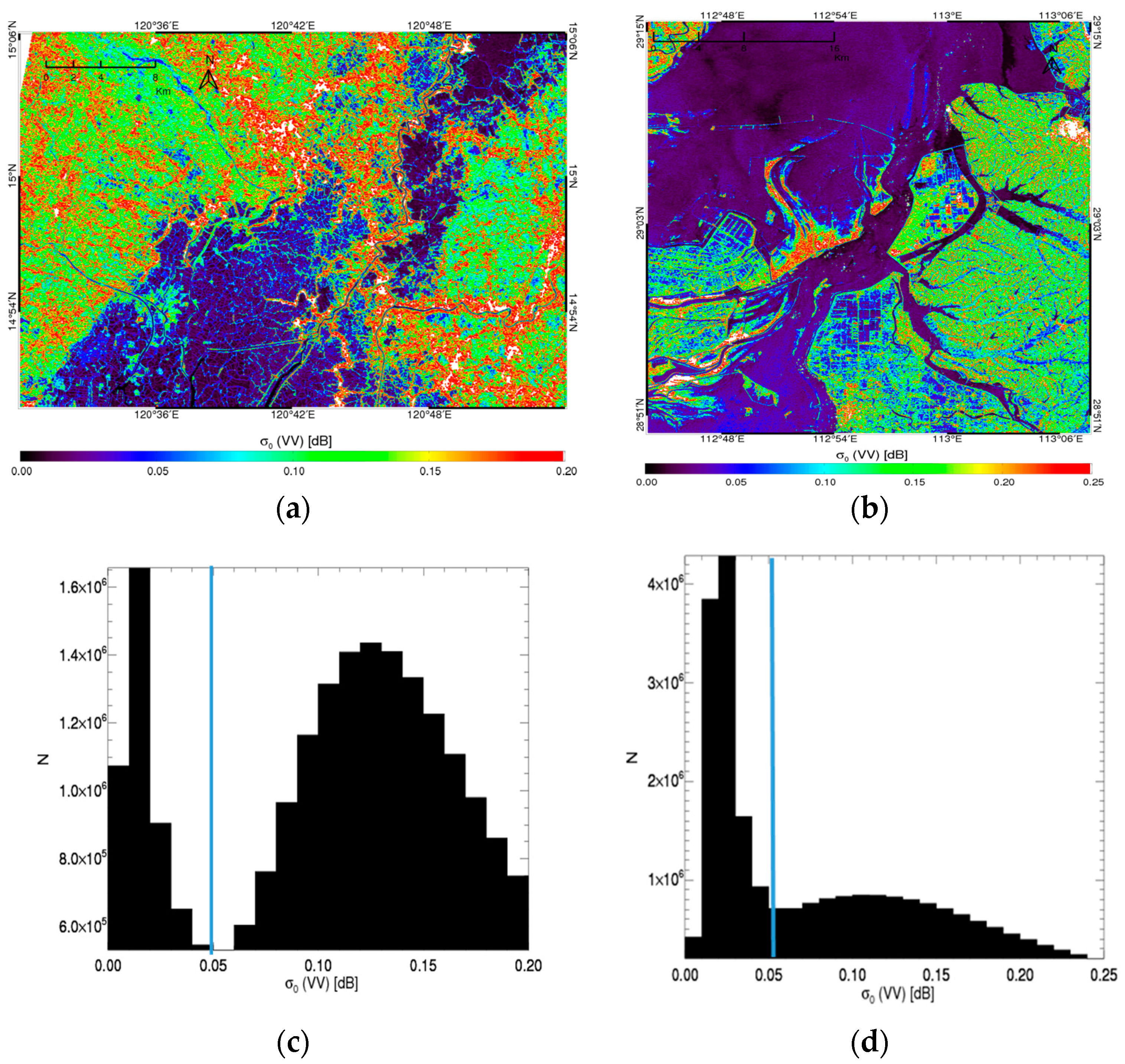
3.2. SAR Technique
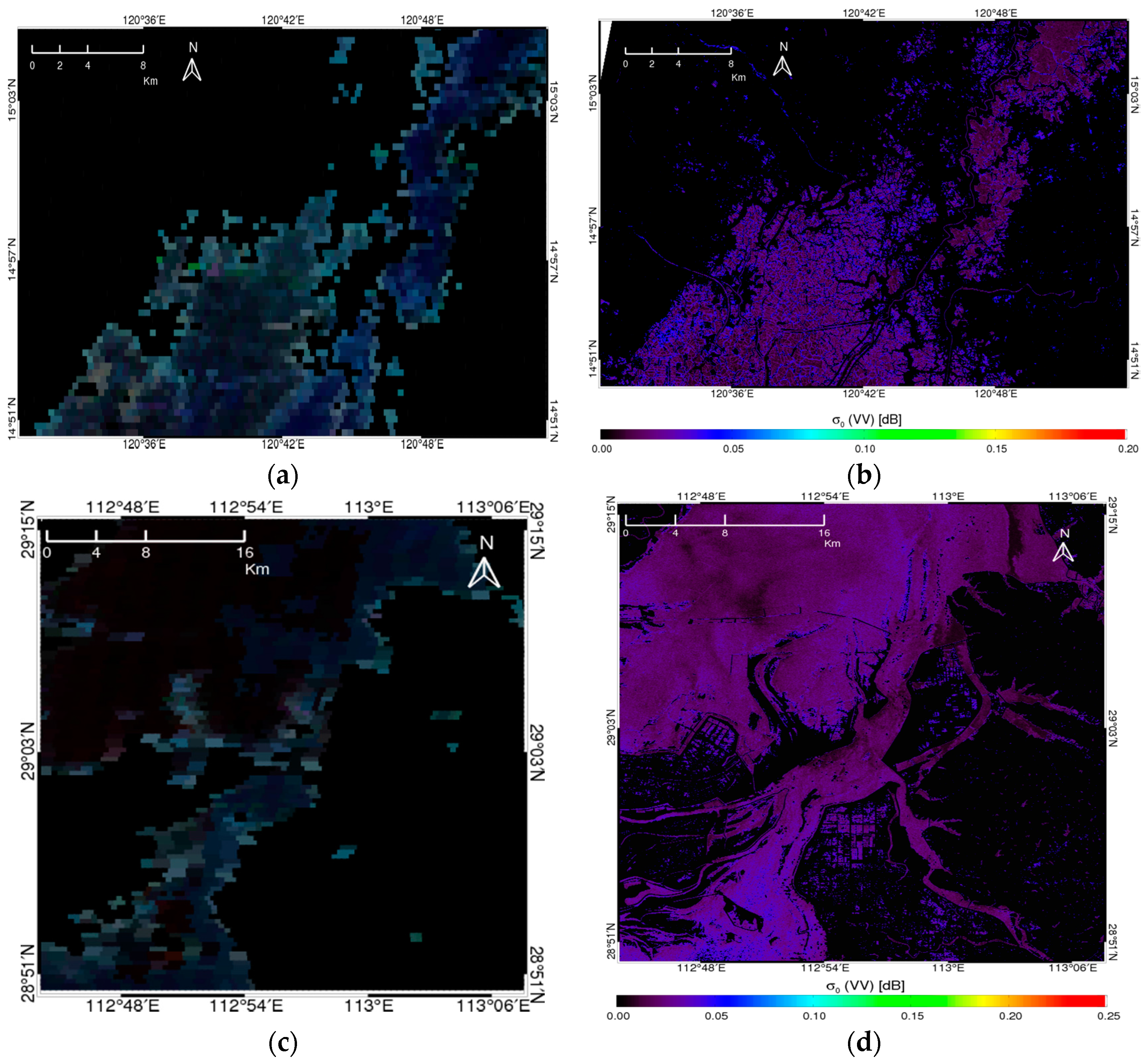
3.3. Comparison with SAR Analysis
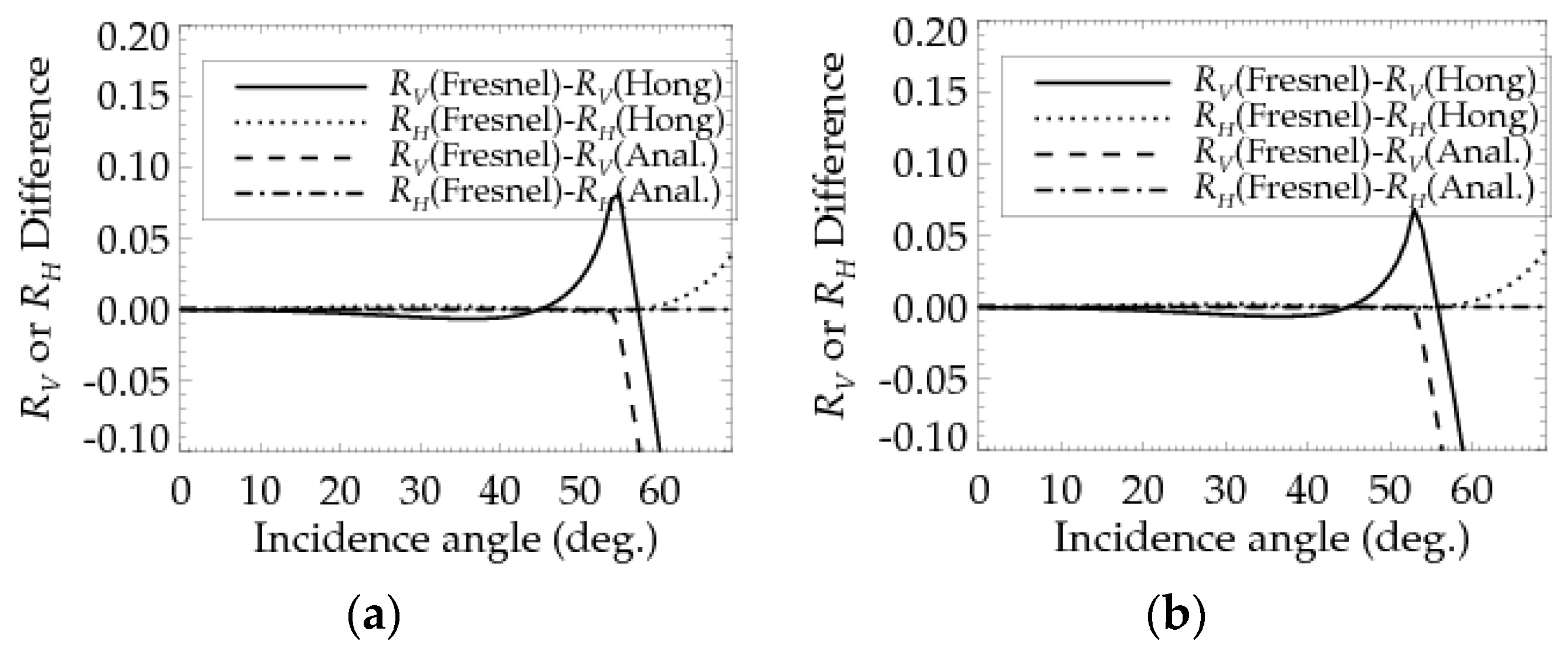
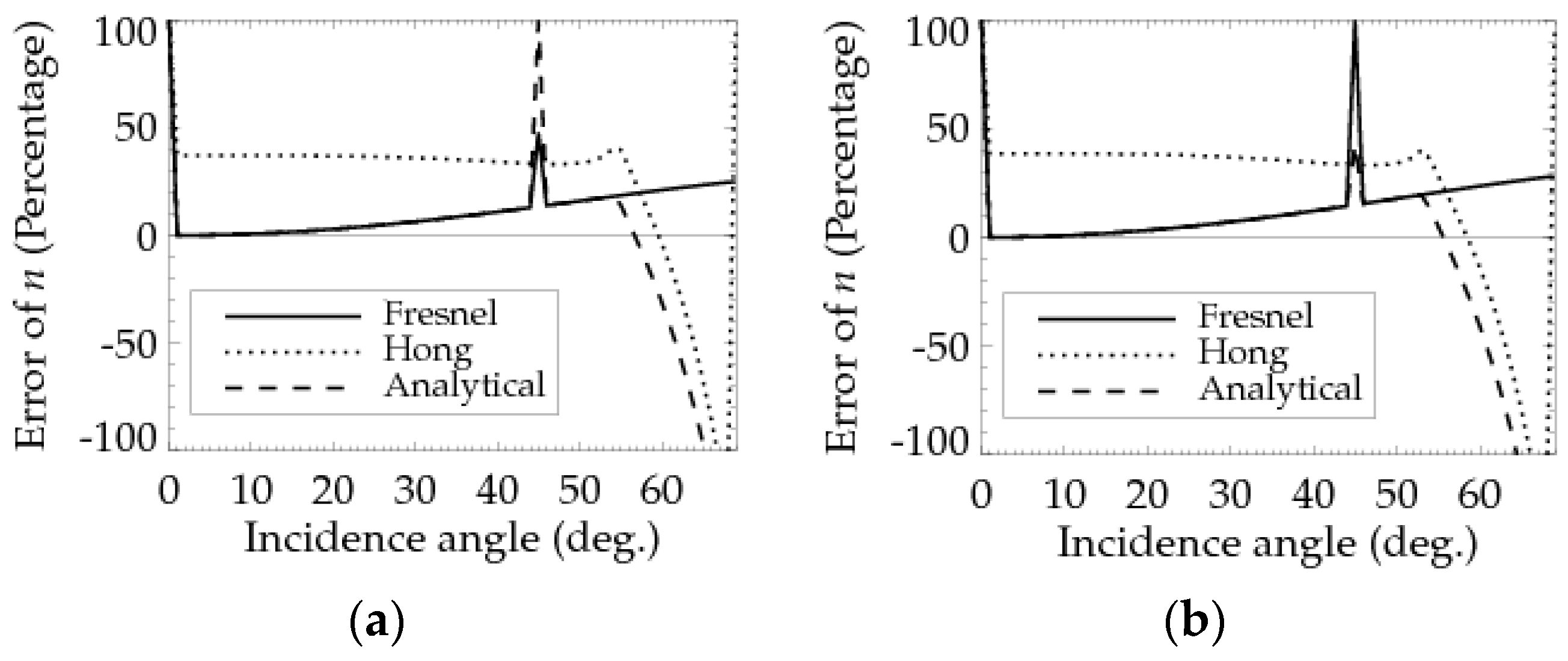
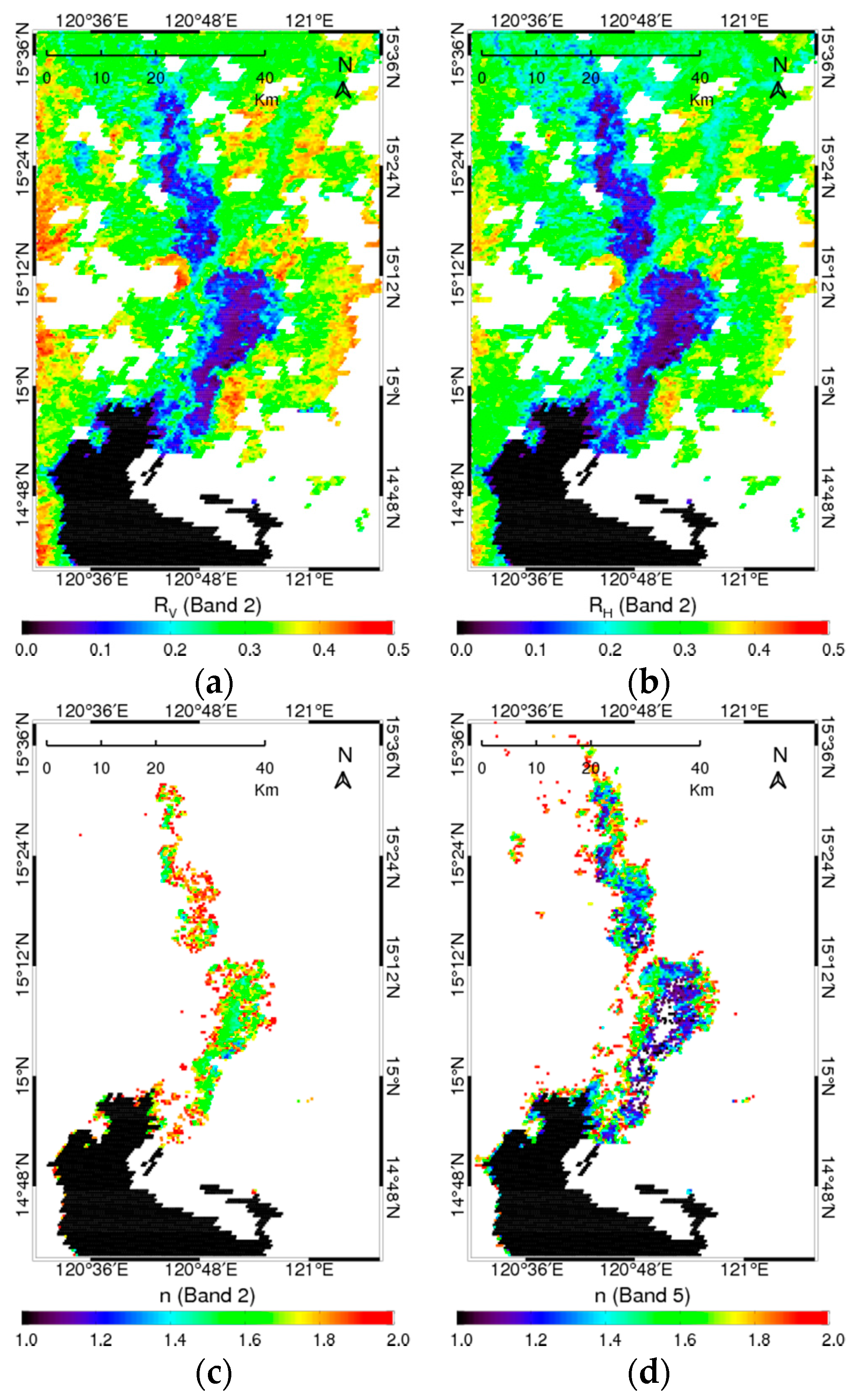
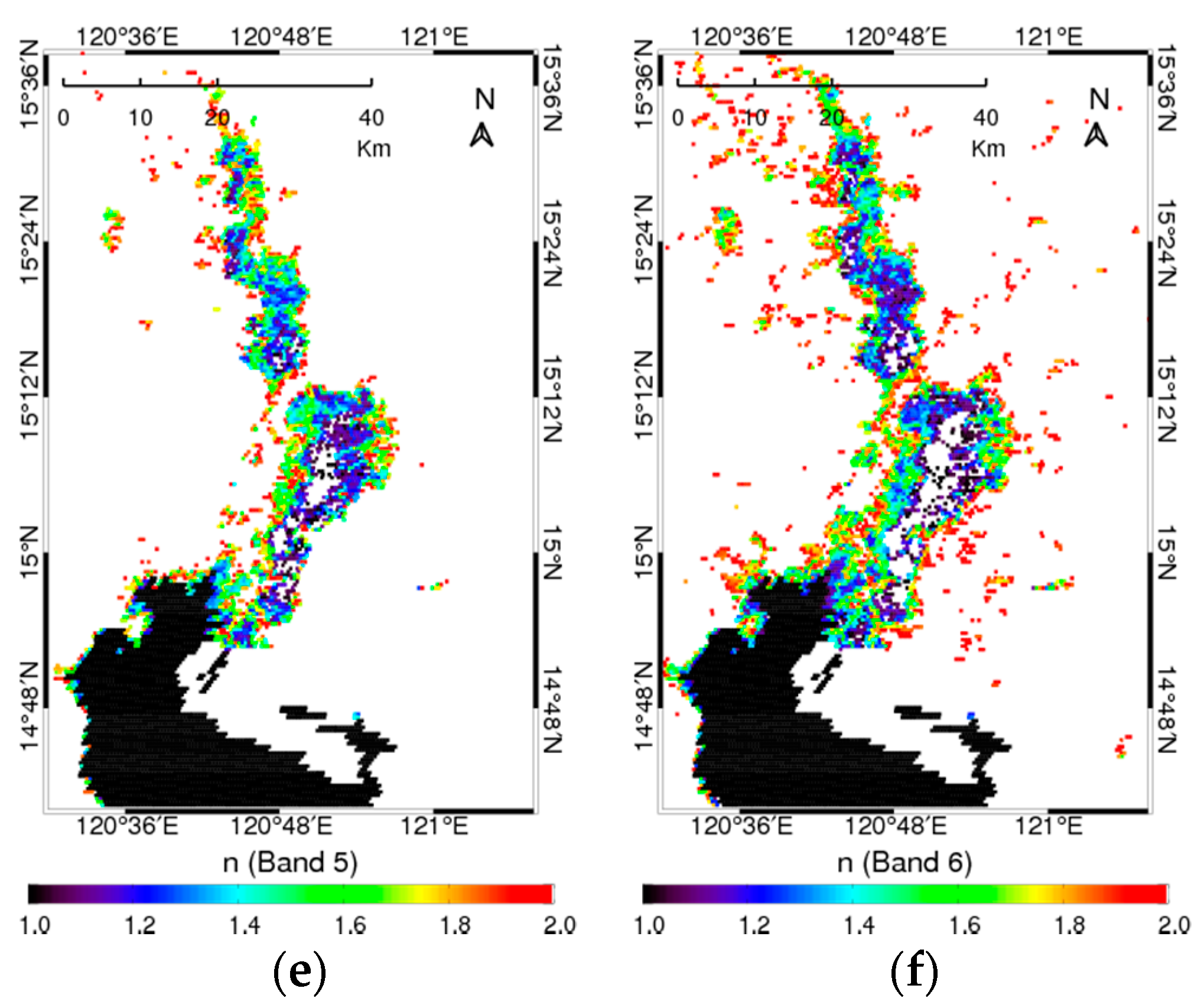
3.4. Refractive Index Retrieval Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Giustarini, L.; Hostache, R.; Matgen, P.; Schumann, G.; Bates, P.D.; Mason, D.C. A change detection approach to flood mapping in urban areas using TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2417–2430. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A.; Voigt, S. Towards operational near-real time flood detection using a split-based automatic thresholding procedure on high resolution TerraSAR-X data. Nat. Hazards Earth Syst. Sci. 2009, 9, 303–314. [Google Scholar] [CrossRef]
- Martinis, S.; Twele, A. A hierarchical spatio-temporal Markov model for improved flood mapping using multi-temporal X-band SAR data. Remote Sens. 2010, 2, 2240–2258. [Google Scholar] [CrossRef]
- Mason, D.C.; Davenport, I.J.; Neal, J.C.; Schumann, G.J.-P.; Bates, P.D. Near real-time flood detection in urban and rural areas using high-resolution Synthetic Aperture Radar images. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3041–3052. [Google Scholar] [CrossRef]
- Schumann, G.; di Baldassarre, G.; Alsdorf, D.; Bates, P.D. Near real-time flood wave approximation on large rivers from space: Application to the River Po, Italy. Water Resour. Res. 2010, 46, 1–8. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Pierdicca, N.; Chini, M.; Guerriero, L. An algorithm for operational flood mapping from Synthetic Aperture Radar (SAR) data using fuzzy logic. Nat. Hazards Earth Syst. Sci. 2011, 11, 529–540. [Google Scholar] [CrossRef]
- Brisco, B.; Touzi, R.; van der Sanden, J.J.; Charbonneau, F.; Pultz, T.J.; D’Iorio, M. Water resource applications with RADARSAT-2—A preview. Int. J. Digit. Earth 2008, 1, 130–147. [Google Scholar] [CrossRef]
- Brisco, B.; Short, N.; van der Sanden, J.; Landry, R.; Raymond, D. A semi-automated tool for surface water mapping with RADARSAT-1. Can. J. Remote Sens. 2009, 35, 336–344. [Google Scholar] [CrossRef]
- Smith, L.C. Satellite remote sensing of river inundation area, stage, and discharge: A review. Hydrol. Process. 1997, 11, 1427–1439. [Google Scholar] [CrossRef]
- Campbell, J.B. Introduction to Remote Sensing; The Guilford Press: New York, NY, USA, 2002; p. 206. [Google Scholar]
- White, L.; Brisco, B.; Dabboor, M.; Schmitt, A.; Pratt, A. Collection of SAR Methodologies for Monitoring Wetlands. Remote Sens. 2015, 7, 7615–7645. [Google Scholar] [CrossRef]
- Brakenridge, G.; Anderson, E.; Nghiem, S.; Caquard, S.; Shabaneh, T. Flood warnings, flood disaster assessments, and flood hazard reduction: The roles of orbital remote sensing. In Proceedings of the 30th International Symposium on Remote Sensing of the Environment, Honolulu, HI, USA, 10–14 November 2003; p. 4. [Google Scholar]
- France, M.J.; Hedges, P.D. A hydrological comparison of Landat TM, Landsat MSS, and black and white aerial photography. In Proceedings of the Seventh International Symposium on Remote Sensing for Resources Development and Environmental Management ISPRS Commission VII, Enschede, The Netherland, 25–29 August 1986. [Google Scholar]
- Jensen, J.R.; Hodgson, M.E.; Christensen, E., Jr.; Mackey, H.E.; Tinney, L.R.; Sharitz, R. Remote sensing inland wetlands: A multispectral approach. Photogramm. Eng. Remote Sens. 1986, 52, 87–100. [Google Scholar]
- Watson, J.P. A visual interpretation of a Landsat mosaic of the Okavango Delta and surrounding area. Remote Sens. Environ. 1991, 35, 1–9. [Google Scholar] [CrossRef]
- Blasco, F.; Bellan, M.F.; Chaudhury, M.U. Estimating the extent of floods in Bangladesh using SPOT data. Remote Sens. Environ. 1992, 39, 167–178. [Google Scholar] [CrossRef]
- Pope, K.O.; Rey-Benayas, J.M.; Paris, J.F. Radar remote sensing of forest and wetland ecosystems in the Central American tropics. Remote Sens. Environ. 1994, 48, 205–219. [Google Scholar] [CrossRef]
- Vila da Silva, J.S.; Kux, H.J.H. Thematic mapper and GIS data integration to evaluate the flooding dynamics within the Panatal. In Proceedings of the International Geoscience and Remote Sensing Symposium, Mato Grosso do Sul State, Brazil, 26–29 May 1992; pp. 1478–1480. [Google Scholar]
- Hallberg, G.R.; Hoyer, B.E.; Rango, A. Application of ERTS-1 imagery to flood inundation mapping. In Proceedings of the Symposium on Significant Results Obtained from the Earth Resources Satellite-1, New Carrollton, MD, USA, 5–9 March 1973; pp. 745–753. [Google Scholar]
- Rango, A.; Salomonson, V.V. Regional flood mapping from space. Water Resour. Res. 1974, 10, 473–484. [Google Scholar] [CrossRef]
- Morrison, R.B.; Cooley, M.E. Assessment of flood damage in Arizona by means of ERTS-1 imagery. In Proceedings of the Symposium on Significant Results Obtained from the Earth Resources Satellite-1, New Carrollton, MD, USA, 5–9 March 1973; pp. 755–760. [Google Scholar]
- McGinnis, D.F.; Rango, A. Earth resources satellite systems for flood monitoring. Geophys. Res. Lett. 1975, 2, 132–135. [Google Scholar] [CrossRef]
- Deutsch, M. Optical Processing of ERTS Data for Determining Extent of the 1973 Mississippi River Flood; U.S. Geol. Surv. Prof. Pap. 929, ERTS-1, a New Window on Our Planet; United States Government Printing Office: Washington, DC, USA, 1976; pp. 209–222.
- Morrison, R.B.; White, P.G. Monitoring Flood Inundation; U.S. Geol. Surv. Prof. Pap. 929, ERTS-1, A New Window on Our Planet; 1976; pp. 196–208. [Google Scholar]
- Ali, A.; Quadir, D.A.; Huh, O.K. Study of river flood hydrology in Bangladesh with AVHRR data. Int. J. Remote Sens. 1989, 10, 1873–1891. [Google Scholar] [CrossRef]
- Barton, I.J.; Bathols, J.M. Monitoring floods with AVHRR. Remote Sens. Environ. 1989, 30, 89–94. [Google Scholar] [CrossRef]
- Gale, S.J.; Bainbridge, S. The floods in eastern Australia. Nature 1990, 345, 767. [Google Scholar] [CrossRef]
- Rasid, H.; Pramanik, M.A.H. Areal extent of the 1988 flood in Bangladesh: How much did the satellite imagery show? Nat. Hazards 1993, 8, 189–200. [Google Scholar] [CrossRef]
- Sheng, Y.; Gong, P.; Xiao, Q. Quantitative dynamic flood monitoring with NOAA AVHRR. Int. J. Remote Sens. 2001, 22, 1709–1724. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Domenikiotis, C.; Loukas, A.; Dalezios, N.R. The use of NOAA/AVHRR satellite data for monitoring and assessment of forest fires and floods. Nat. Hazards Earth Syst. Sci. 2003, 3, 1–14. [Google Scholar] [CrossRef]
- MCFeeters, S.K. The use of normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Gao, B.C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Xiao, X.; Boles, S.; Frolking, S.; Salas, W.; Moore, B., III; Li, C. Observation of flooding and rice transplanting of paddy rice fields at the site to landscape scales in China using vegetation sensor data. Int. J. Remote Sens. 2002, 23, 3009–3022. [Google Scholar] [CrossRef]
- Ho, T.K.L.; Umitsu, M.; Yamaguchi, Y. Flood hazard mapping by satellite images and SRTM DEM in the Vu Gia—Thu Bon alluvial plain central Vietnam. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 275–280. [Google Scholar]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Ning, L.; Liu, H.; Bao, A. Identification of inundation hazard zones in Manas Basin, China, using hydrodynamic modeling and remote sensing. J. Water Resour. Prot. 2013, 5, 469–473. [Google Scholar] [CrossRef]
- Kumar, R.; Acharya, P. Flood hazard and risk assessment of 2014 floods in Kashmir Valley: A space-based multisensor approach. Nat. Hazards 2016, 84, 437–464. [Google Scholar] [CrossRef]
- Li, R.R.; Kaufman, Y.J.; Hao, W.M.; Salmon, J.M.; Gao, B.C. A technique for detecting burn scars using MODIS data. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1300–1308. [Google Scholar]
- Roy, D.; Lewis, P.E.; Justice, C.O. Burned area mapping using multi-temporal moderate spatial resolution data—A bi-directional reflectance model-based expectation approach. Remote Sens. Environ. 2002, 83, 263–286. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, C.; Ticehurst, C.; Merrin, L.; Thew, P. An evaluation of MODIS daily and 8-day composite products for floodplain and wetland inundation mapping. Wetlands 2013, 33, 823–835. [Google Scholar] [CrossRef]
- Huang, C.; Chen, Y.; Wu, J. Mapping spatio-temporal flood inundation dynamics at large river basin scale using time-series flow data and MODIS imagery. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 350–362. [Google Scholar] [CrossRef]
- Lensky, I.M.; Rosenfeld, D. Clouds-aerosols-precipitation satellite analysis tool (CAPSAT). Atmos. Chem. Phys. 2008, 8, 6739–6753. [Google Scholar] [CrossRef]
- Dao, P.D.; Liou, Y.-A. Object-based flood mapping and affected rice field estimation with Landsat 8 OLI and MODIS data. Remote Sens. 2015, 7, 5077–5097. [Google Scholar] [CrossRef]
- Kwak, Y.; Arifuzzanman, B.; Iwami, Y. Prompt proxy mapping of flood damaged rice fields using MODIS-derived indices. Remote Sens. 2015, 7, 15969–15988. [Google Scholar] [CrossRef]
- Ticehurst, C.; Guerschman, J.P.; Chen, Y. The strengths and limitations in using the daily MODIS open water likelihood algorithm for identifying flood events. Remote Sens. 2014, 6, 11791–11809. [Google Scholar] [CrossRef]
- Spurr, R. A new approach to the retrieval of surface properties from earthshine measurements. J. Quant. Spectrosc. Radiat. Transf. 2004, 83, 14–46. [Google Scholar] [CrossRef]
- Warren, S.G. Optical constant of ice from the ultraviolet to the microwave. Appl. Opt. 1984, 23, 1206. [Google Scholar] [CrossRef]
- Aas, E. Refractive index of phytoplankton derived from its metabolite composition. J. Plankton Res. 1996, 18, 2223–2249. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Herring, D.D.; Ranson, K.J.; Collatz, G.J. Earth observing system AM1 mission to Earth. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1045–1055. [Google Scholar] [CrossRef]
- Masuoka, E.; Fleig, A.; Wolfe, R.E.; Patt, F. Key characteristics of the MODIS data products. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1313–1323. [Google Scholar] [CrossRef]
- Gupta, R.P.; Banerji, S. Monitoring of reservoir volume using Landsat data. J. Hydrol. 1985, 77, 159–170. [Google Scholar] [CrossRef]
- National Aeronautics and Space Administration (NASA) Jet Propulsion Laboratory (JPL). Available online: http://speclib.jpl.nasa.gov/documents/jhu_desc/ (accessed on 28 July 2016).
- Scientific Data Hub—Copernicus. Available online: https://www.scihub.copernicus.eu/dhus/#/home/ (accessed on 25 September 2016).
- Otsu, N. A threshold selection method from gray-level histogram. IEEE Trans. Geosci. Remote Sens. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Ford, A.; Roberts, A. Colour Space Conversions; Westminster University: London, UK, 1998. [Google Scholar]
- Bourke, P. RGB Colour Space—Lists of RGB Values for Named Colours; Swinburne University of Technology: Melbourne, Australia, 1995; Available online: http://paulbourke.net/texture_colour/colourspace/ (accessed on 11 May 2016).
- Umari, M.H.; Ghodgaonkar, D.K.; Varadan, V.V. A free-space bistatic calibration technique for the measurement of parallel and perpendicular reflection coefficients of planar samples. IEEE Trans. Geosci. Remote Sens. 1991, 40, 19–24. [Google Scholar] [CrossRef]
- Huang, Y.; Nakhkash, M. Characterization of layered dielectric medium using reflection coefficient. Electron. Lett. 1998, 34, 1207–1208. [Google Scholar] [CrossRef]
- Tousey, R. On calculating the optical constants from reflection coefficients. J. Opt. Soc. Am. 1939, 29, 235–238. [Google Scholar] [CrossRef]
- Hong, S. Retrieval of refractive index over specular surfaces for remote sensing applications. J. Appl. Remote Sens. 2009, 3, 033560. [Google Scholar] [CrossRef]
- Hong, S. Detection of Asian dust (Hwangsa) over the Yellow sea by decomposition of unpolarized infrared reflectivity. Atmos. Environ. 2009, 43, 5887–5893. [Google Scholar] [CrossRef]
- Hong, S.; Shin, I.; Ou, M. Comparison of the ISEM infrared sea-surface emissivity model with a physical emissivity model. J. Atmos. Ocean. Technol. 2010, 27, 345–352. [Google Scholar] [CrossRef]
- Hong, S. Surface roughness and polarization ratio in microwave remote sensing. Int. J. Remote Sens. 2010, 31, 2709–2716. [Google Scholar] [CrossRef]
- Hong, S. Global retrieval of small-scale roughness over land surfaces at microwave frequency. J. Hydrol. 2010, 389, 121–126. [Google Scholar] [CrossRef]
- Hong, S.; Shin, I. A physically-based inversion algorithm for retrieving soil moisture in passive microwave remote sensing. J. Hydrol. 2011, 405, 24–30. [Google Scholar] [CrossRef]
- Hong, S. Detection of small-scale roughness and refractive index of sea ice in passive satellite microwave remote sensing. Remote Sens. Environ. 2010, 114, 1136–1140. [Google Scholar] [CrossRef]
- Hong, S.; Shin, I. Global trends of sea ice: small-scale roughness and refractive index. J. Clim. 2010, 23, 4669–4676. [Google Scholar] [CrossRef]
- Hong, S.; Shin, I. Wind speed retrieval based on sea surface roughness measurements from spaceborne microwave radiometers. J. Appl. Meteorol. Climatol. 2013, 52, 507–516. [Google Scholar] [CrossRef]
- Hong, S.; Seo, H.; Kwon, Y. A unique satellite-based sea surface wind speed algorithm and its application in tropical cyclone intensity analysis. J. Atmos. Ocean. Technol. 2016, 33, 1363–1375. [Google Scholar] [CrossRef]
- Hong, S.; Seo, H.; Kim, N.; Shin, I. Physical retrieval of tropical ocean surface wind speed under rain-free conditions using spaceborne microwave radiometers. Remote Sens. Lett. 2015, 6, 380–389. [Google Scholar] [CrossRef]
- Azzam, R.M.A. Direct relation between Fresnel’s interface reflection coefficients for the parallel and perpendicular polarizations. J. Opt. Soc. Am. 1979, 69, 1007–1016. [Google Scholar] [CrossRef]
- Azzam, R.M.A. Relations between amplitude reflectances and phase shifts of the p and s polarizations when electromagnetic radiation strikes interfaces between transparent media. Appl. Opt. 1979, 18, 1884–1886. [Google Scholar] [CrossRef] [PubMed]
- Azzam, R.M.A. Relationship between the p and s Fresnel reflection coefficients of an interface independent of angle of incidence. J. Opt. Soc. Am. 1986, 3, 928–929. [Google Scholar] [CrossRef]
- Hong, S. Polarization conversion for specular components of surface reflection. IEEE Trans. Geosci. Remote Sens. Lett. 2013, 10, 1469–1472. [Google Scholar] [CrossRef]
- Hong, S. Decomposition of unpolarized emissivity. Int. J. Remote Sens. 2010, 31, 2109–2114. [Google Scholar] [CrossRef]
- Wu, X.; Smith, W.L. Emissivity of rough sea surface for 8–13 μm: Modeling and verification. Appl. Opt. 1997, 36, 2609–2619. [Google Scholar] [CrossRef] [PubMed]
- Querry, M.R. On direct solution of the generalized Fresnel reflectance equations. J. Opt. Soc. Am. 1969, 59, 876–877. [Google Scholar] [CrossRef]
- Kildemo, M.; Bulkin, P.; Deniau, S.; Drévillon, B. Real time control of plasma deposited multilayers by multiwavelength ellipsometry. Appl. Phys. Lett. 1996, 68, 3395–3397. [Google Scholar] [CrossRef]
- Heitz, T.; Hofrichter, A.; Bulkin, P.; Drévillon, B. Real time control of plasma deposited optical filters by multiwavelength ellipsometry. J. Vac. Sci. Technol. 2000, 18, 1303–1307. [Google Scholar] [CrossRef]
- Hale, G.M.; Querry, M.R. Optical constants of water in the 200-nm to 200-μm wavelength region. Appl. Opt. 1973, 12, 555–563. [Google Scholar] [CrossRef] [PubMed]
- Zoloratev, V.M.; Demin, A.V. Optical constants of water over a broad range of wavelengths, 0.1 Ǻ—l m. Opt. Spectrosc. 1977, 43, 157. [Google Scholar]
- Liang, S. An investigation of remotely-sensed soil depth in the optical region. Int. J. Remote Sens. 1997, 18, 3395–3408. [Google Scholar] [CrossRef]
- Strahler, A.; Muchoney, D.; Borak, J.; Friedl, M.; Gopal, S.; Lambinet, E. MODIS BRDF/Albedo Product Algorithm Theoretical Basis Document; MOD43, Version 5.0; Boston University: Boston, MA, USA, 1999. [Google Scholar]
- Armaly, B.F.; Ochoa, J.G.; Look, D.C. Restrictions on the inversion of the Fresnel reflectance equations. Appl. Opt. 1972, 11, 2907–2910. [Google Scholar] [CrossRef] [PubMed]
- McCrone, W.C.; Draftz, R.G.; Delly, J.G. The Particles Atlas; Ann, A., Ed.; Ann Arbor Science Publishers: Ann Arbor, MI, USA, 1967. [Google Scholar]
- Hodgson, R.T.; Newkirk, D.D. Pyridine immersion: A technique for measuring the refractive index of marine particles. Proceedings of International Society for Optical Engineering, San Diego, CA, USA, 19 August 1975; pp. 62–64. [Google Scholar]
- Weast, R.C. Handbook of Chemistry and Physics; CRC: Cleveland, OH, USA, 1981. [Google Scholar]


© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ban, H.-J.; Kwon, Y.-J.; Shin, H.; Ryu, H.-S.; Hong, S. Flood Monitoring Using Satellite-Based RGB Composite Imagery and Refractive Index Retrieval in Visible and Near-Infrared Bands. Remote Sens. 2017, 9, 313. https://doi.org/10.3390/rs9040313
Ban H-J, Kwon Y-J, Shin H, Ryu H-S, Hong S. Flood Monitoring Using Satellite-Based RGB Composite Imagery and Refractive Index Retrieval in Visible and Near-Infrared Bands. Remote Sensing. 2017; 9(4):313. https://doi.org/10.3390/rs9040313
Chicago/Turabian StyleBan, Hyun-Ju, Young-Joo Kwon, Hayan Shin, Han-Sol Ryu, and Sungwook Hong. 2017. "Flood Monitoring Using Satellite-Based RGB Composite Imagery and Refractive Index Retrieval in Visible and Near-Infrared Bands" Remote Sensing 9, no. 4: 313. https://doi.org/10.3390/rs9040313
APA StyleBan, H.-J., Kwon, Y.-J., Shin, H., Ryu, H.-S., & Hong, S. (2017). Flood Monitoring Using Satellite-Based RGB Composite Imagery and Refractive Index Retrieval in Visible and Near-Infrared Bands. Remote Sensing, 9(4), 313. https://doi.org/10.3390/rs9040313