

A Gas Flow Measurement System Based on Lead Zirconate Titanate Piezoelectric Micromachined Ultrasonic Transducer
 ,
,
Abstract
:1. Introduction
2. Measurement Principle
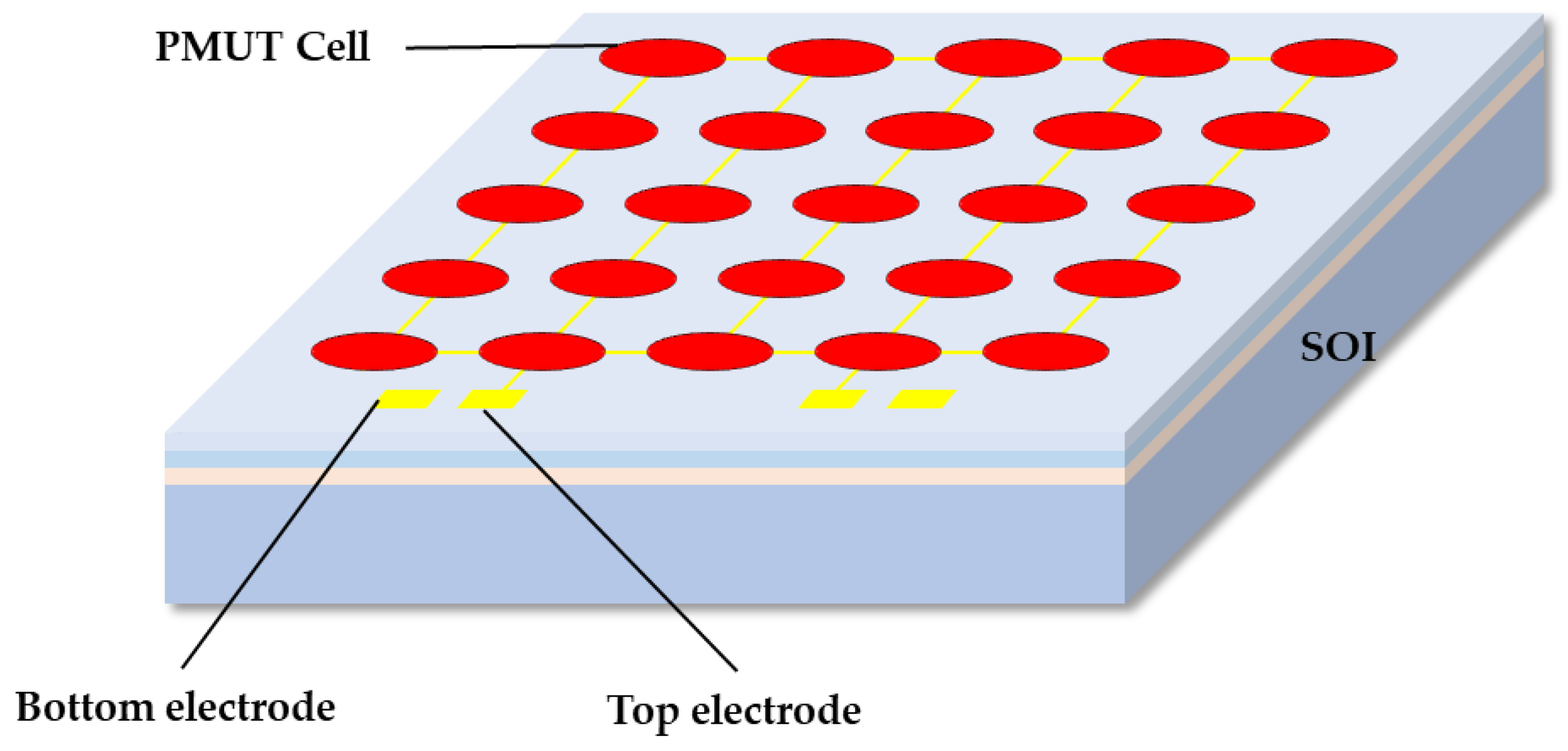
3. The Design of the PMUT Array
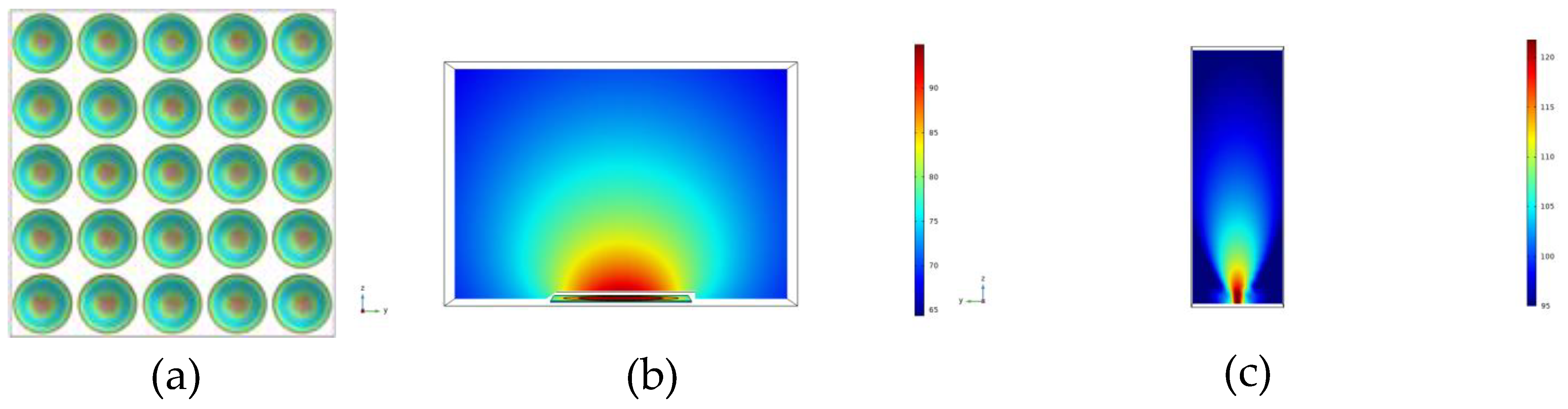
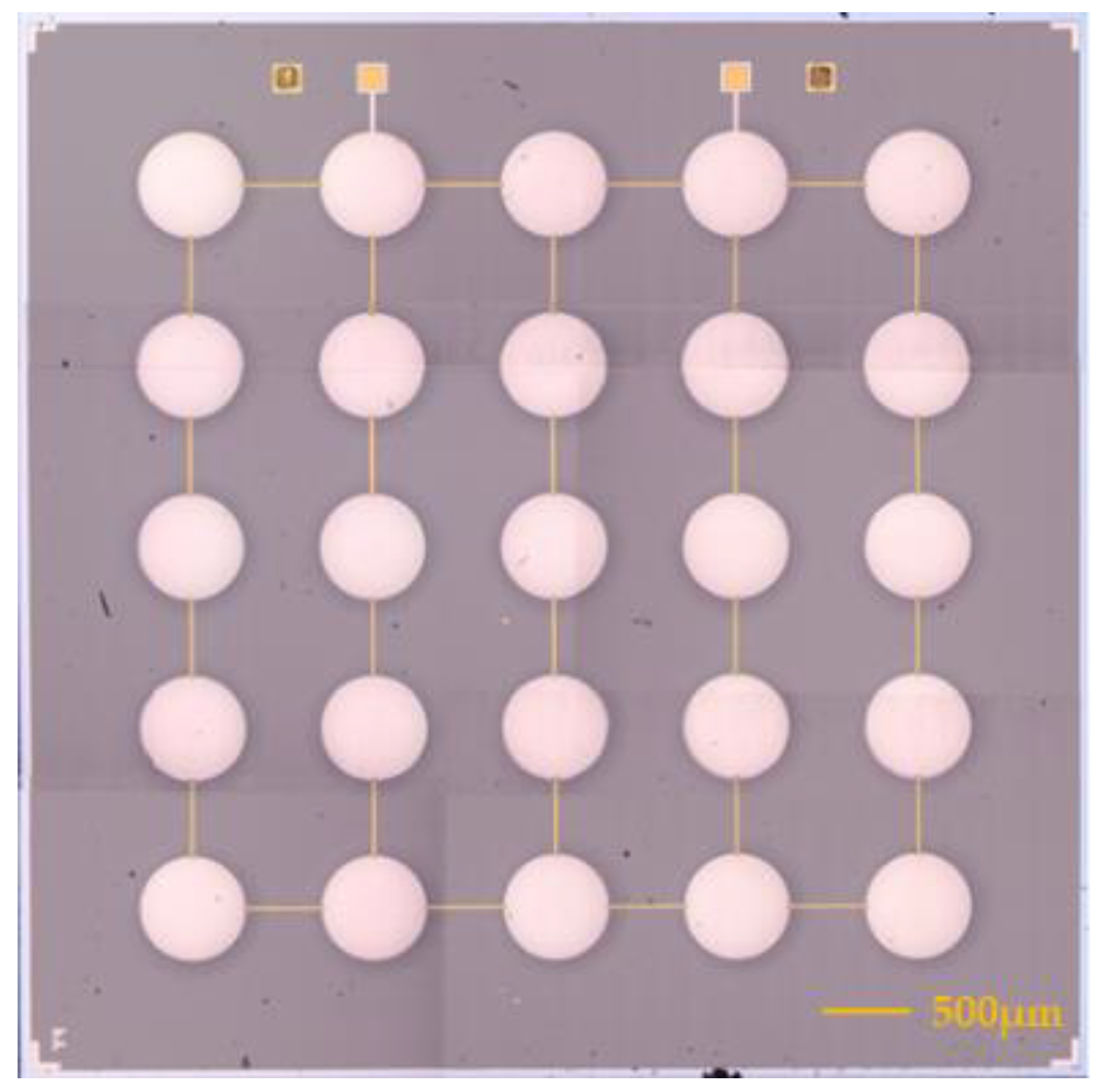
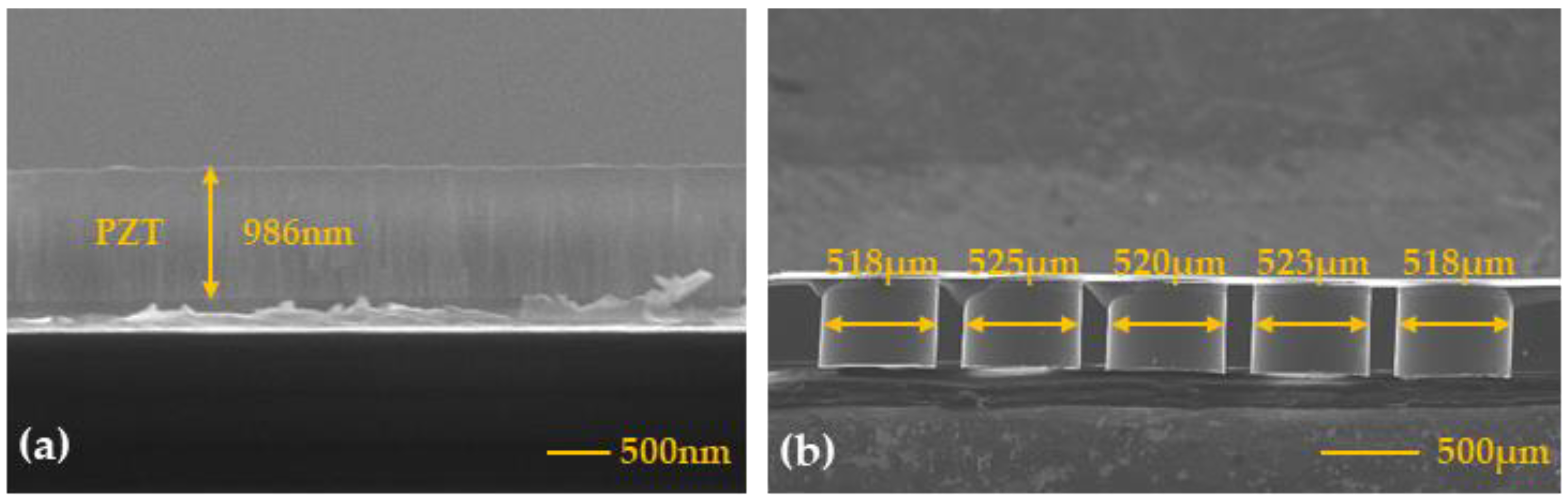
3.1. Acoustic Transducer Design and Fabrication
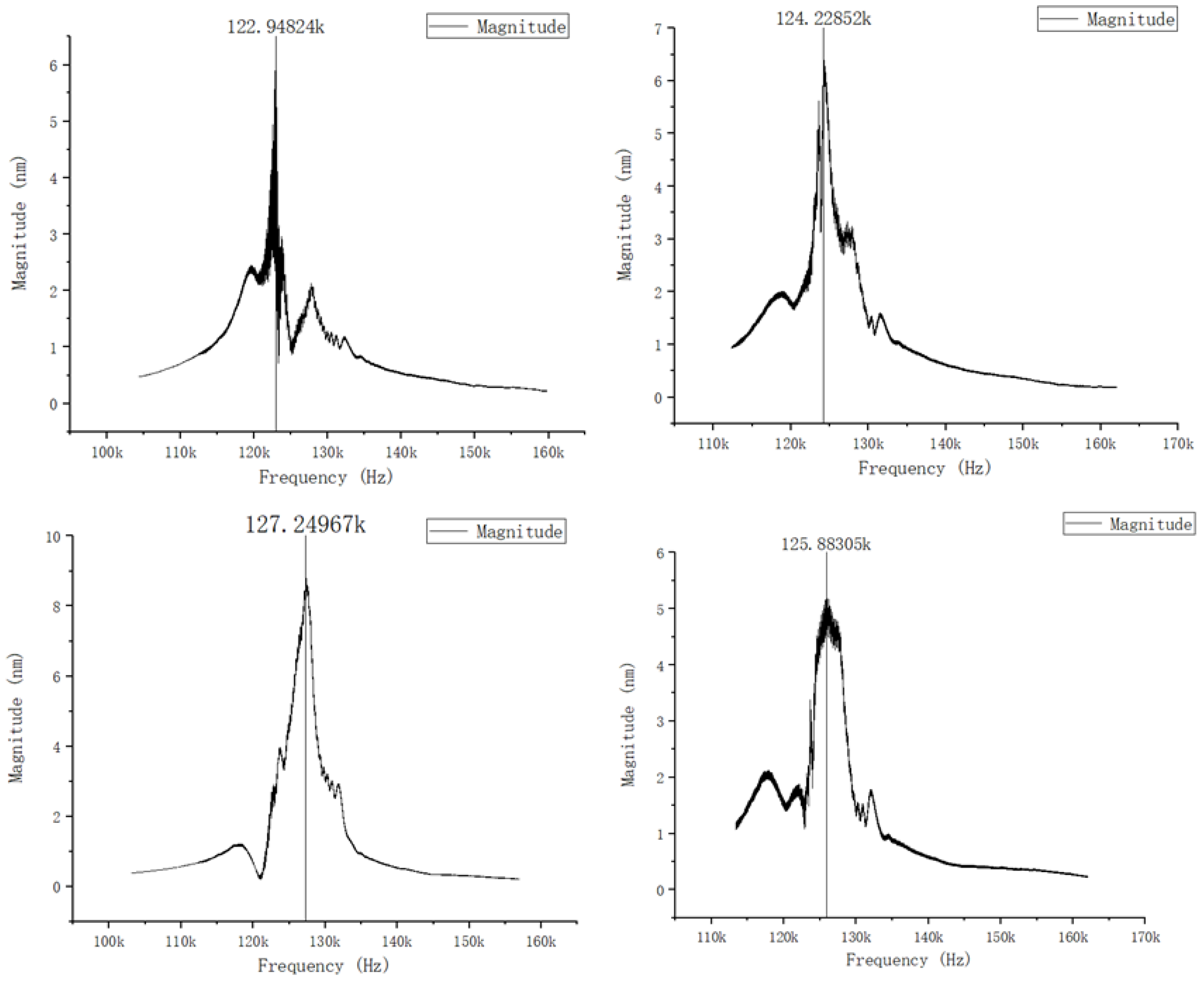
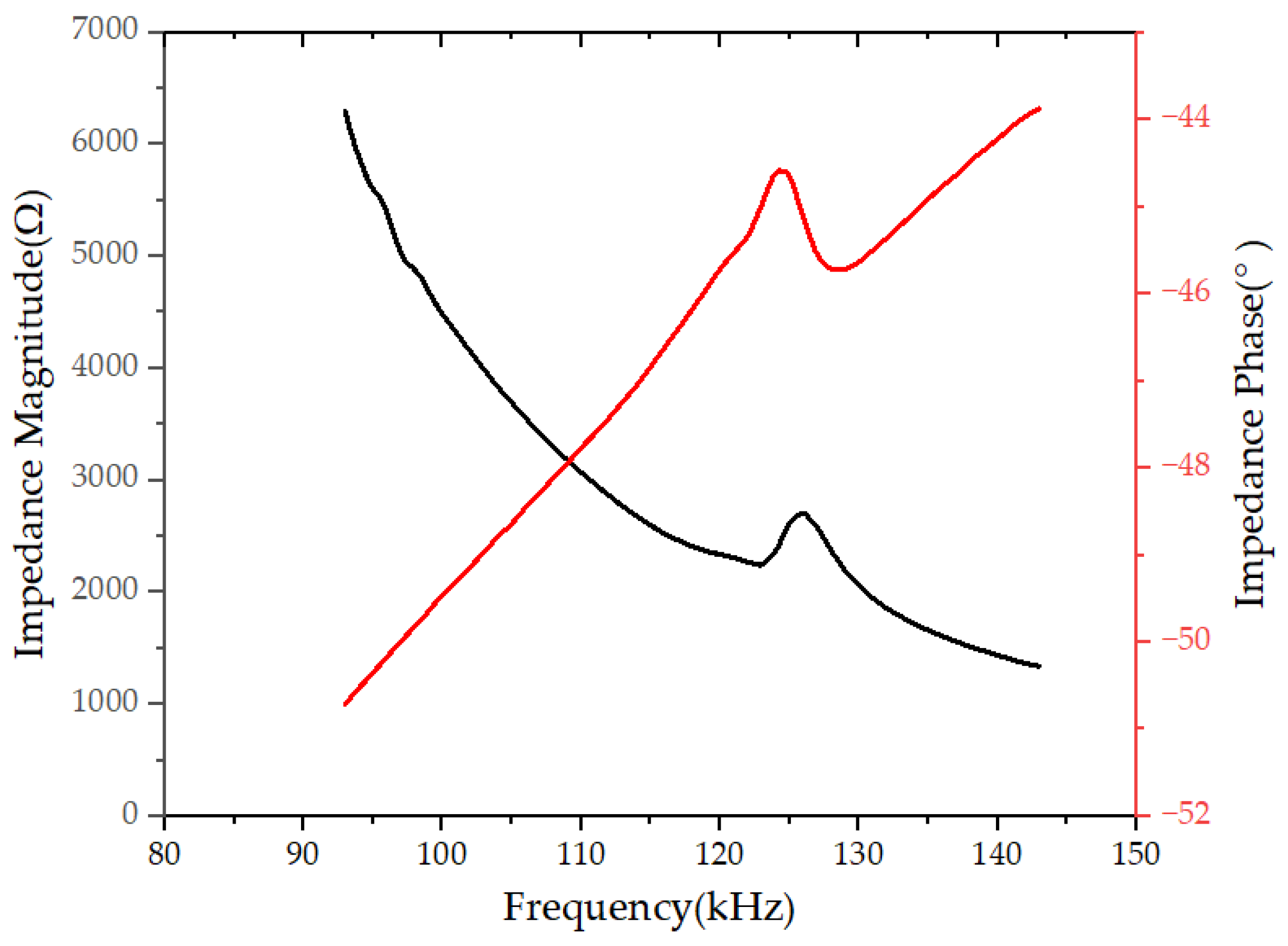
3.2. Characterization
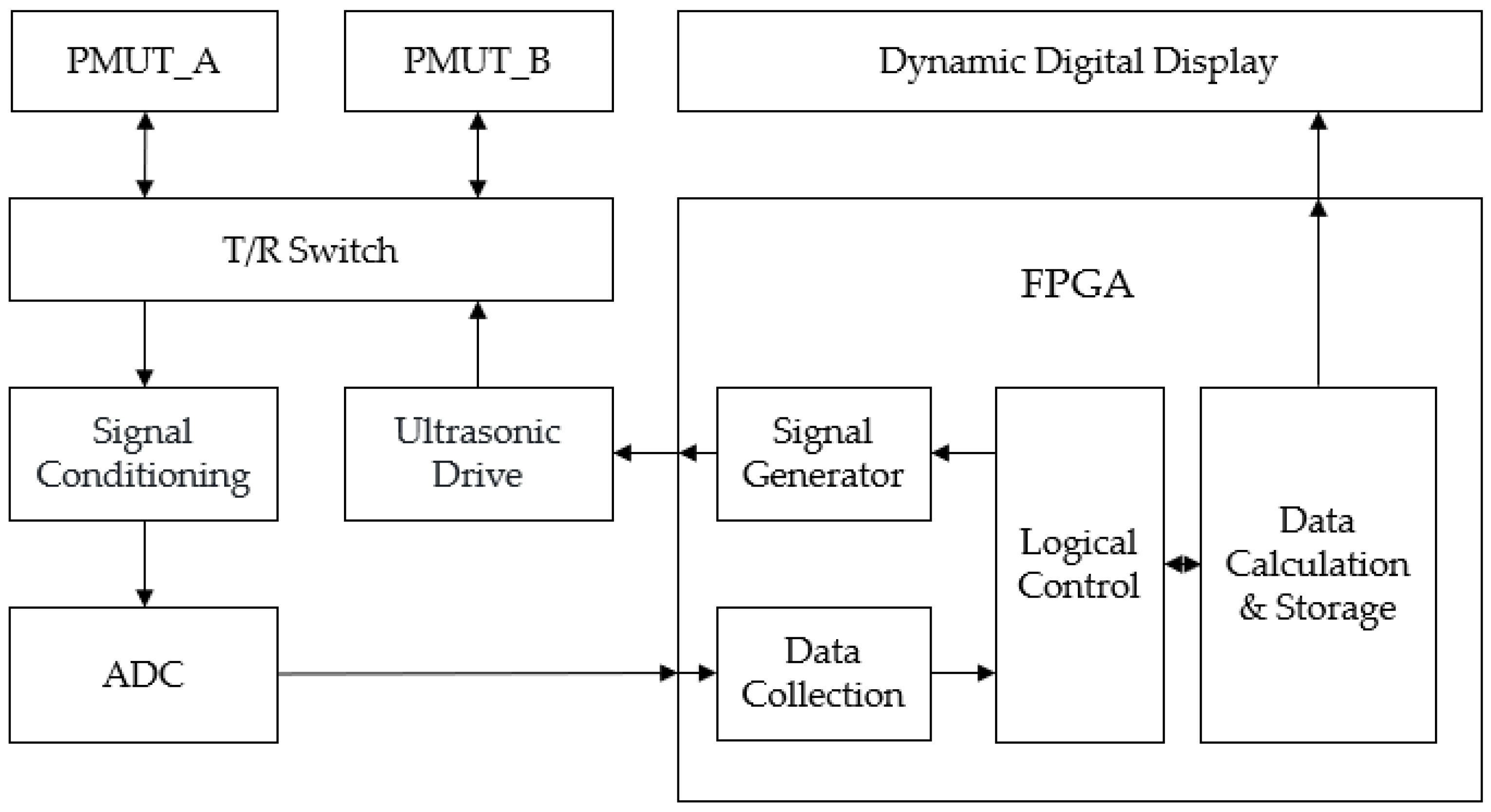
3.3. Transmission Performance
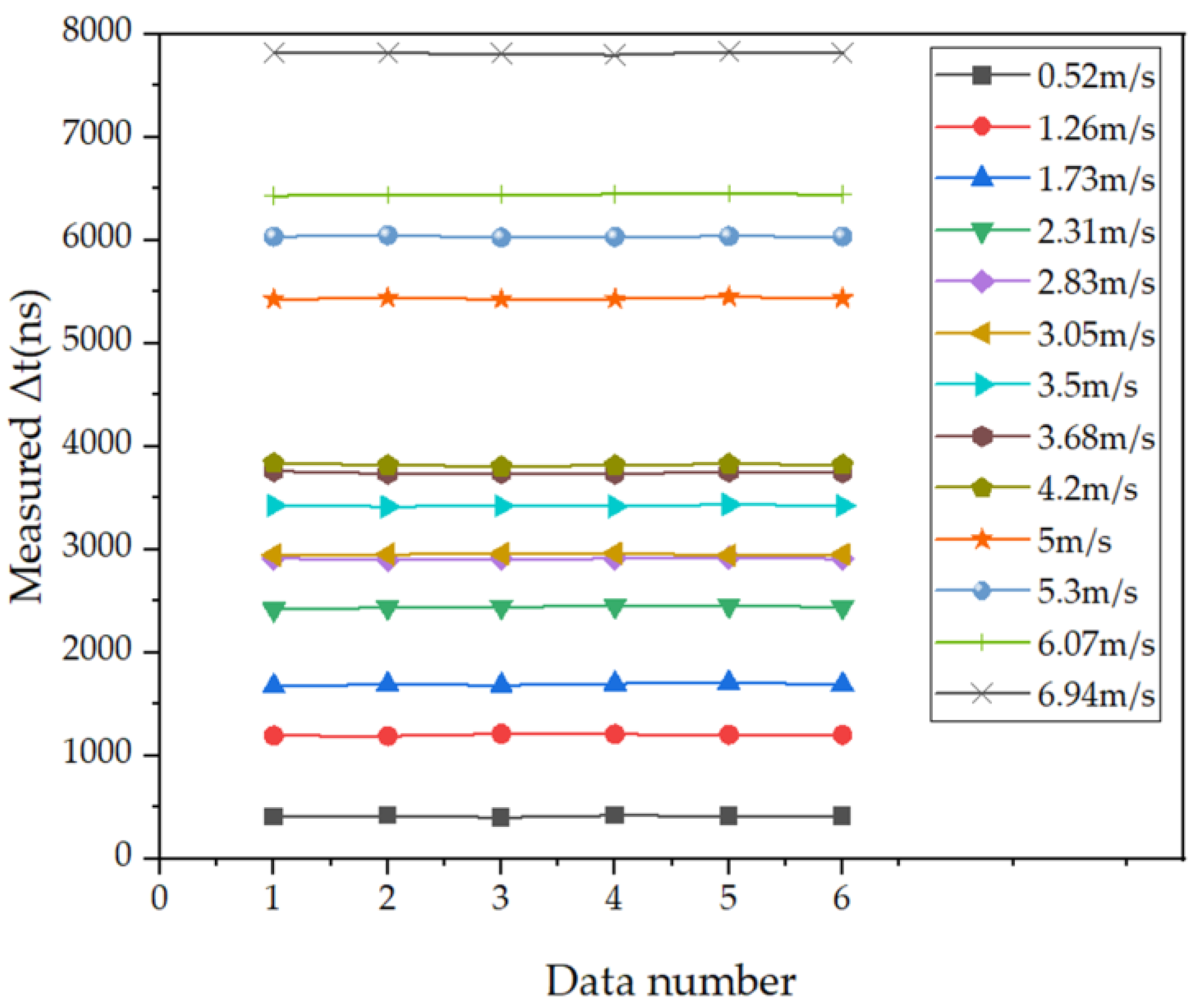
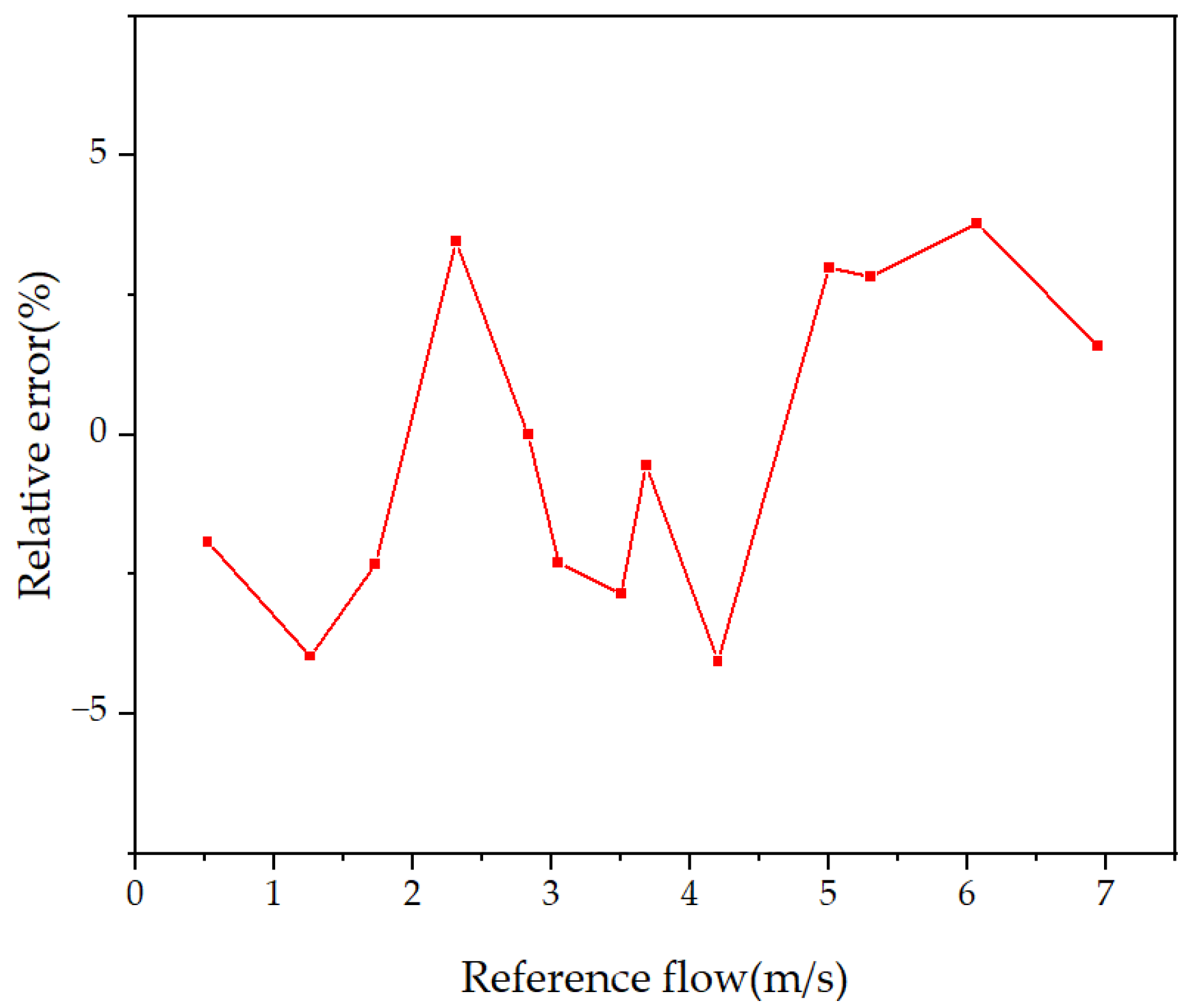
4. Experiment Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mohindru, P. Recent Advancements in Volumetric Flowmeter for Industrial Application. Heat. Mass. Transf. 2023, 59, 2149–2166. [Google Scholar] [CrossRef]
- Meribout, M.; Azzi, A.; Ghendour, N.; Kharoua, N.; Khezzar, L.; AlHosani, E. Multi-Phase Flowmeters Targeting Oil & Gas Industries. Measurement 2020, 165, 108111. [Google Scholar]
- Watral, Z.; Jakubowski, J.; Michalski, A. Electromagnetic Flowmeters for Open Channels: Current State and Development Prospects. Flow. Meas. Instrum. 2015, 42, 16–25. [Google Scholar] [CrossRef]
- Rajita, G.; Mandal, N. Review on Transit Time Ultrasonic Flowmeter. In Proceedings of the 2016 2nd International Conference on Control, Instrumentation, Energy & Communication (CIEC), Kolkata, India, 28–30 January 2016; pp. 88–92. [Google Scholar]
- Lynnworth, L.C.; Liu, Y. Ultrasonic Flowmeters: Half-Century Progress Report, 1955–2005. Ultrasonics 2006, 44, e1371–e1378. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Xiao, T.; Zhen, J. Application of Micro Electro Mechanical System (MEMS) Technology in Photoacoustic Imaging. J. Beijing Inst. Technol. 2022, 31, 238–250. [Google Scholar]
- Li, Y.M.; Chen, L.; Ahmed, F. Piezoelectric Bimorph MEMS Speakers. Nanotechnol. Precis. Eng. 2022, 5, 5–12. [Google Scholar]
- Ke, W.; Teng, H.; Yu, Z. Research on A Mems Pyrotechnic With A Double-Layer Barrier Safety and Arming Device. Def. Technol. 2022, 18, 2034–2044. [Google Scholar]
- Gaehun, J.O.; Pierre, E.; Simon, J.B. Wafer-Level Hermetically Sealed Silicon Photonic MEMS. Photonics Res. 2022, 10, 14–21. [Google Scholar]
- Chen, X.; Liu, C.; Yang, D.; Liu, X.; Hu, L.; Xie, J. Highly Accurate Airflow Volumetric Flowmeters via PMUTs Arrays Based on Transit Time. J. Microelectromech. Syst. 2019, 28, 707–716. [Google Scholar] [CrossRef]
- Delsing, J. A New Velocity Algorithm for Sing-Around-Type Flowmeters. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1987, 34, 431–436. [Google Scholar] [CrossRef]
- Yu, Y.; Zong, G. Note: Ultrasonic Liquid Flowmeter for Small Pipes. Rev. Sci. Instrum. 2012, 83, 026107. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Chen, Y.; Hu, S.; Ni, Z. Continuous Ultrasonic Flow Measurement for Aerospace Small Pipelines. Ultrasonics 2021, 109, 106260. [Google Scholar] [CrossRef] [PubMed]
- Akasheh, F.; Myers, T.; Fraser, J.D.; Bose, S.; Bandyopadhyay, A. Development of piezoelectric micromachined ultrasonic transducers. Sens. Actuators A Phys. 2004, 111, 275–287. [Google Scholar] [CrossRef]
- Qiu, Y.; Gigliotti, J.V.; Wallace, M.; Griggio, F.; Demore, C.E.; Cochran, S.; Trolier-McKinstry, S. Piezoelectric Micromachined Ultrasound Transducer (PMUT) Arrays for Integrated Sensing, Actuation and Imaging. Sensors 2015, 15, 8020–8041. [Google Scholar] [CrossRef] [PubMed]
- Oralkan, O.; Hansen, S.T.; Bayram, B.; Yaralioglu, G.G.; Ergun, A.S.; Khuri-Yakob, B.T. High-frequency CMUT arrays for high-resolution medical imaging. In Proceedings of the 2004 IEEE Ultrasonics Symposium, Montreal, QC, Canada, 23–27 August 2004; Volume 1–3, pp. 399–402. [Google Scholar]
- Yoon, H.S.; Chang, C.; Jang, J.H.; Bhuyan, A.; Choe, J.W.; Nikoozadeh, A.; Watkins, R.D.; Stephens, D.N.; Butts Pauly, K.; Khuri-Yakub, B.T. Ex Vivo HIFU Experiments Using a 32 × 32-Element CMUT Array. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2016, 63, 2150–2158. [Google Scholar] [CrossRef]
- Ergun, A.S.; Huang, Y.L.; Zhuang, X.F.; Oralkan, O.; Yaralioglu, G.G.; Khuri-Yakub, B.T. Capacitive micromachined ultrasonic transducers: Fabrication technology. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 2242–2258. [Google Scholar]
- Ji, W.; Liu, L.; Xing, Z.; Zhang, D.; Wang, Y.; Chen, L.; Chen, Y.; Sun, X.; Du, Y. Total-focus ultrasonic imaging of defects in solids using a PZT piezoelectric micromachined ultrasonic transducer array. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2020, 68, 1380–1386. [Google Scholar] [CrossRef]
- Lu, Y.; Tang, H.-Y.; Fung, S.; Boser, B.E.; Horsley, D.A. Pulseecho ultrasound imaging using an AlN piezoelectric micromachined ultrasonic transducer array with transmit beam-forming. J. Microelectromech. Syst. 2016, 25, 179–187. [Google Scholar] [CrossRef]
- Vanneer, P.; Robers, T.; Volker, A.W.F. A PMUT Based Flowmeter: A Feasibility Study. In Proceedings of the IEEE International Ultrasonics Symposium (IUS), Prague, Czech Republic, 21–25 July 2013; pp. 1319–1322. [Google Scholar]
- Zhu, K.; Chen, X.; Qu, M. Non-Contact Ultrasonic Flow Measurement for Small Pipes Based on AlN Piezoelectric Micromachined Ultrasonic Transducer Arrays. J. Microelectromech. Syst. 2021, 30, 480–487. [Google Scholar] [CrossRef]
- Ding, H. A Pulsed Wave Doppler Ultrasound Blood Flowmeter by PMUTs. J. Microelectromech. Syst. 2021, 30, 680–682. [Google Scholar] [CrossRef]
- Xiu, X.; Yang, H.; Ji, M.; Lv, H.; Zhang, S. Development of MEMS Airflow Volumetric Flow Sensing System with Single Piezoelectric Micromachined Ultrasonic Transducer (PMUT) Array. Micromachines 2022, 13, 1979. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Chen, M.; Wu, Z. A Miniaturized Transit-Time Ultrasonic Flowmeter Based on ScAlN Piezoelectric Micromachined Ultrasonic Transducers for Small-Diameter Applications. Microsyst. Nanoeng. 2023, 9, 49. [Google Scholar] [CrossRef] [PubMed]
- Pavlović, V.; Dimitrijević, B.; Stojčev, M.; Golubović, L.; Žvković, M.; Stamenković, L. Realization of the Ultrasonic Liquid Flowmeter Based on the Pulse-Phase Method. Ultrasonics 1997, 35, 87–102. [Google Scholar] [CrossRef]
- Raine, A.B.; Aslam, N.; Underwood, C.P.; Danaher, S. Development of an Ultrasonic Airflow Measurement Device for Ducted Air. Sensors 2015, 15, 10705–10722. [Google Scholar] [CrossRef]
- Amri, K.; Wiranata, L.F.; Suprijanto; Kurniadi, D. Fluid Flow Velocity Measurement Using Dual-Ultrasonic Transducer by Means of Simultaneously Transit Time Method. In Proceedings of the 4th International Conference on Instrumentation, Communications, Information Technology, and Biomedical Engineering (ICICI-BME), Bandung, Indonesia, 2–3 November 2015; pp. 113–116. [Google Scholar]
- Zhu, K. An Ultrasonic Flowmeter for Liquid Flow Measurement in Small Pipes Using AlN Piezoelectric Micromachined Ultrasonic Transducer Arrays. J. Micromech. Microeng. 2020, 30, 125010. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Li, Z.; Zhang, J.; Li, D.; Dou, H.; Wu, P.; Yang, J.; Zhang, W.; Mu, X. A Gas Flow Measurement System Based on Lead Zirconate Titanate Piezoelectric Micromachined Ultrasonic Transducer. Micromachines 2024, 15, 45. https://doi.org/10.3390/mi15010045
Liu T, Li Z, Zhang J, Li D, Dou H, Wu P, Yang J, Zhang W, Mu X. A Gas Flow Measurement System Based on Lead Zirconate Titanate Piezoelectric Micromachined Ultrasonic Transducer. Micromachines. 2024; 15(1):45. https://doi.org/10.3390/mi15010045
Chicago/Turabian StyleLiu, Tao, Zhihao Li, Jiahuan Zhang, Dongxiao Li, Hanjie Dou, Pengfan Wu, Jiaqian Yang, Wangyang Zhang, and Xiaojing Mu. 2024. "A Gas Flow Measurement System Based on Lead Zirconate Titanate Piezoelectric Micromachined Ultrasonic Transducer" Micromachines 15, no. 1: 45. https://doi.org/10.3390/mi15010045