Guard Cell and Tropomyosin Inspired Chemical Sensor

Department of Engineering, James Madison University, 801 Carrier Drive, MSC 4113 Harrisonburg, VA 22807, USA
Micromachines 2013, 4(4), 378-401; https://doi.org/10.3390/mi4040378
Submission received: 26 May 2013
/
Revised: 30 September 2013
/
Accepted: 11 October 2013
/
Published: 18 October 2013
(This article belongs to the Special Issue Bioinspired Microsensors and Micromachines)
Abstract
:Sensors are an integral part of many engineered products and systems. Biological inspiration has the potential to improve current sensor designs as well as inspire innovative ones. This paper presents the design of an innovative, biologically-inspired chemical sensor that performs “up-front” processing through mechanical means. Inspiration from the physiology (function) of the guard cell coupled with the morphology (form) and physiology of tropomyosin resulted in two concept variants for the chemical sensor. Applications of the sensor design include environmental monitoring of harmful gases, and a non-invasive approach to detect illnesses including diabetes, liver disease, and cancer on the breath.
1. Introduction
Sensors are an integral part of many engineered products, systems, and manufacturing processes as they provide feedback, monitoring, safety, and a number of other benefits. Development of sensor technology is an exciting area of research as it spans engineering, science and technology. As products become increasingly autonomous and technology ubiquitous in our daily lives, sensors provide the necessary input to make these ideas a reality.
Accessing archived sensor design information during the creation of a new product that senses a common parameter is standard practice. Sensing unusual parameters can require out-of-the-box thinking or borrowing ideas from another discipline. This sort of motivation has allowed nature to impact the field of sensor design. Bacteria, plants, insects, mammals, reptiles, etc., have diverse form and function, and may be considered as adaptive systems with elegant methods of sensing and communication [1]. Biomimetic sensor technology is an emerging branch of sensor research, which offers several advantages over traditional sensor technology [2,3,4,5,6]
Utilizing concepts from a non-engineering domain such as biology has been shown to spark inspiration and innovation for a variety of future technologies [7,8,9,10]. In a reductionist vie, biological organisms operate in much the same way that engineered systems operate, each part or piece in the overall system has a function, which provides a common ground between the engineering and biology domains. An incredible variety of natural sensors exist for navigation, spatial orientation, prey and object detection, etc., which provide engineers new ideas for improvements to current technology, new sensor technology and potential sensor miniaturization [11]. Adapting features and characteristics of biological systems can significantly advance engineered systems, including sensors, which has resulted in novel designs and improved sensor technology [1,2,3,6,11,12,13,14,15,16,17,18,19,20,21].
The biological domain provides inspiration at many levels, such as cellular, organism and species. For instance, if a system level sensor design is desired with consideration of details for interfacing, communication or packaging, one can study the interaction of one species with another or look to any ecosystem for ideas. Not only is nature rich with sensing methods, but also it provides strategies associated with the use of those sensing methods. Although more abstract, generalizing the biological principle and developing an analogy can lead to innovative engineering solutions. Biological systems provide insight into sustainable and adaptable design, which often leads to designs that are more elegant, efficient and sustainable.
This paper details the conceptual development of a chemical sensor following a systematic method for biologically-inspired design. The following section provides background information on sensor design and biological sensing. The next section describes the design methodology. The remainder of the paper focuses on the conceptual design of the biomimetic sensor following the methodology. The paper ends with conclusions and future work.
2. Related Work and Background
This section provides information on non-biomimetic sensor design in general, biomimetic chemical sensors as well as general information about biological sensing mechanisms.
2.1. Sensor Design
Development of sensor technology is an exciting area of research as it spans engineering, science and technology. As products become increasingly autonomous and technology ubiquitous in our daily lives, sensors provide the necessary input to make these ideas a reality. Sensors come in a number of scales from prepackaged, calibrated and ready for use for industrial operations down to an individual IC style component that will be integrated into a future product. No matter the application, the first question the designer must address is “what is the measurand?” meaning, what is the parameter to measure [22]. From there, a series of questions about the resolution, environment, accuracy, calibration, span, mounting, etc., derived from empirical knowledge are posed [23] and some may go unanswered. As Wilson explains, “all environmental, mechanical and measurement conditions must be considered” [23]. However, sensor technology handbooks focus on providing reference material for several types of sensors and do not prescribe a methodology for design. Rather, information on standards and combined practical information on diversified subjects related to the most important physical principles, design and use of various sensors are presented [22,24,25]. Frequently, industrial white papers, resource guides, original equipment manufacturer application notes and empirical design guides are suggested for further reference [22,24,25]. Electronic product design books are available, however, they assume the designer is above the novice level and focus on providing check lists for specific types of designs [26,27,28].
Even with the wealth of information available to a sensor designer, depending on the focus and knowledge of the designer (e.g., electron transport, transducer, packaging, complete device) the design can quickly become overwhelming and follow a disorganized process. Having a set of guiding steps or a design methodology could assist with streamlining the sensor design process. It is clear that a systematic design process is lacking for the development of sensor technology. Fraden states that his book exists “to stimulate a creative reader to choose alternative ways of design and to apply nontrivial solutions to trivial problems” [22]. The sensor design process can benefit from high level, generalizations of function as used in the design of consumer and electro-mechanical products [29,30,31,32]. By considering what must be done, without focusing on how it is actually accomplished, a designer can take advantage of analogies drawn from other disciplines (e.g., biology). Doebelin confirms this viewpoint, “once the general functional concepts have been clarified, the details of operation may be considered fruitfully” [33]. Functional abstractions, disregarding specific mathematical behavior, as used in engineering design theory are the key to achieving innovative sensor designs. The formalized method for biologically-inspired design established in this paper offers a systematic design process for the development of biomimetic sensor technology, which can assist with system and component level design.
2.2. Biomimetic Chemical Sensors
Chemical type sensors identify and quantify specific substances or chemical reactions in a medium such as gas, liquid or mixture and exhibit selectivity to the desired target substance with little or no interference from surrounding substances. Sensitivity, the minimal concentration or change needed for successful sensing, is synonymous with resolution for chemical sensors. The human senses of taste and smell are currently the focus of research, which aims to replace human taste and smell testers; these sensors can also double as a method for food quality testing, drug “sniffing” and other pharmaceutical applications. All chemical sensors described in this sub-section are of the chemoreceptor type. Electric tongues have been achieved through directly copying the functionality of the human tongue by creating microchips with arrays of electrode recognition sites or “taste buds” [13,34] with some systems employing pattern recognition algorithms [5,35]. Directly mimicking the human taste bud is a piezoelectric quartz crystal with a molecularly imprinted polymer coating, one that has an enhanced “memory effect,” which is inherently stable, long-lasting, can be washed and has high reproducibility [36].
Several approaches to replicating the human nose have been successful at detecting and identifying an odorant. A metal oxide or conductive polymer that changes resistance in the presence of an odorant, atop electrodes, directly mimics the functionality and morphology of the olfactory epithelium thin mucus layer [13,37]. A similar attempt to closely mimic the functionally and morphology is the e-mucosa that combines chemoresistive sensor arrays with odor separation columns [38]. This approach enhances odor discrimination by employing multiple stages of sensing, which provide spatio-temporal data that are analyzed using a probabilistic neural network. A less direct method, yet analogous to the olfactory epithelium functionality, is a sensor utilizing a quartz crystal microbalance comprised of a polymer-coated resonating disk that changes mass in the presence of an odorant, thereby changing the resonant frequency of the sensor [37]. Also analogous to the olfactory epithelium functionality is a fiber optic sensor coated with a chemically active fluorescent dye, which changes polarity in the presence of an odorant [37,39]. A shift in the fluorescent spectrum indicates an odorant is present through a wavelength change, making this sensor ideal for applications in electrically noisy environments.
Electronic noses that mimic olfactory receptor functionality at a high-level have been achieved through various types of sensing element arrays. A differential electronic nose that places two heated metal oxide gas sensor arrays in parallel are subjected to two-dimensional convolution [40]. This approach has shown to significantly increase sensitivity as well as recognize genuine odors from faux ones. Another approach to increase electronic nose sensitivity was through the integration of three types of nanowires and carbon nanotube structures to form a single sensor array [41]. Pattern recognition was performed principal using component analysis. More recently, researchers have begun to investigate the use of cell-based and protein-based biosensor arrays to create a bioelectronic nose for increased sensitivity and selectivity [42].
2.3. Biological Sensing Mechanisms
An incredible variety of sensing mechanisms exist in nature. This has occurred over billions of years; therefore the lasting solutions have evolved to fulfill unique ecological niches, which make them ideal for study and imitation. Not only is nature rich in sensing methods, but also it provides strategies associated with the use of those sensing methods.
A fundamental difference between biological and engineered systems is the granularity of sensors available [43]. For example, skin and muscle fibers have dedicated sensory systems that monitor a very small area of skin for a specific stimulus or a single muscle fiber, respectively. A biological system measures at a low granularity (i.e., nerve signal), whereas an engineered system typically measures at a higher level of granularity (i.e., heart rate) [43]. Additionally, biological sensors typically exhibit low energy requirements, high sensitivity and redundancy [44,45,46]. Furthermore, they exhibit parallel sampling and processing of sensory information by having tens or even hundreds of receptor organs in parallel, each containing dozens of receptor cells, which improves the signal-to-noise ratio through averaging [11,43]. This also reduces the likelihood of error due to loss of or failure of a receptor organ. A great lesson from nature is redundancy; in most biological systems, there are many instances of redundancy due to the specialized application of each sensor.
A strategy that many natural sensing systems utilize is “up-front” processing, meaning that sensory information is processed local to the stimulus site through mechanical or electrical means, which vastly reduces data streams and increases efficiency. Rather than actively sense and process all stimuli, the stimulus intensity must meet a critical threshold or critical magnitude in order to trigger a sensory signal that elicits a response from the biological system [44,45]. For example, the Venus flytrap has two lobes connected by a hinge, which are covered with hairs that detect when prey land on one of the lobes. Only one hair being touched will not cause the trap to close due to “up-front” processing through mechanical means. The trap will only spring closed when a critical threshold of hairs (two or more) have been touched [47]. Insect olfactory chemoreception exhibits “up-front” processing through shape recognition at the receptor site [48]. Once an odor molecule of the correct shape binds to a receptor site, the critical threshold is met and the receptor site undergoes a conformational change (i.e., shape change) and triggers the sensory signal. The biological strategy is exhibited among multiple biological species to achieve different sensing goals.
3. Design Approach
The design approach used in this research to develop a biologically-inspired sensor is the systematic approach to biologically-inspired engineering design [49,50]. The method is a comprehensive design approach, including a methodology and supporting tools, that integrates with function-based design techniques to facilitate biologically-inspired design. As a function-based method it offers several advantages: Archival and transmittal of design information; reduces fixation on aesthetic features or a particular physical solution; allows one to define the scope or boundary of the design problem as broad or narrow as necessary; and encourages one to draw upon experience, knowledge stored in a database or through creative methods during concept generation. Function, as used in systematic design [31], is recognized as a way to connect nature and engineering through a commonality. This approach addresses the knowledge requirement problem of working across the biology and engineering domains and offers the aforementioned advantages through the use of engineering function.
Using functional representation and abstraction to describe biological systems presents the natural designs in an engineering context and allows designers to make connections between biological and engineered systems. Thus, the biological information is accessible to engineering designers with varying biological knowledge, but a common understanding of engineering design methodologies. By creating a bridge between the two domains through the perspective of function, engineers can leverage the elegant designs found in the world around them.
The supporting design tools that comprise the framework achieve: Identification of relevant biological solutions based on function; translation of identified biological systems of interest; functional representation of biological information such that it can be used for engineering design activities; and conceptualization of biomimetic engineering designs. The five step design methodology, summarized in Table 1, facilitates systematic biologically-inspired design from a problem-driven and biology-driven perspectives [49,50]. Following a traditional design approach, the problem-driven perspective begins from customer needs or a given problem to solve. Following curiosity, the biology-driven approach encourages a designer to explore a biological system of interest and develop a solution that could potentially be applied to an existing problem. The biology-driven approach can be thought of as a solution-driven approach; however, the goal may not be to develop a solution, but to reveal synergies [51] or comprehend an interesting biological system. The methodology also prescribes the tools of the framework to use while guiding the designer through the steps.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Description |
|---|---|
| 1. Needs or Curiosity | Problem-driven: The traditional route, which involves gathering a set of needs, requirements and mapping them to important flows. Biology-driven: identify an interesting biological system to explore. |
| 2. Decompose | The needs or interesting biological system are decomposed into, first, a black box model and, second, a functional model. All models created with this method use the Functional Basis modeling lexicon [52]. When following the solution-driven route, the designer can refer to the general biological modeling methodology presented in [53] for assistance with creating a biological functional model. |
| 3. Query | Knowledge bases are queried to identify solutions to each function/flow pair of the functional model. Two knowledge bases are required: one containing engineered systems and the other containing biological systems. Both are indexed by engineering function and flow. |
| 4. Make Connections | Connections are made through analogies, metaphors and first principles to assist with making the leap between the biology and engineering domains. |
| 5. Concept Generation | Concept generation is performed to create biologically-inspired conceptual designs. Concept synthesis involves analysis, reflection and synthesis. Analysis is on the returned engineered and biological solutions from Step 3. Reflection is on the connections to the engineering domain formulated in Step 4. Synthesis is of the existing engineering solutions, engineering solutions inspired by biology and inventive solutions inspired by biology to derive a new design. |
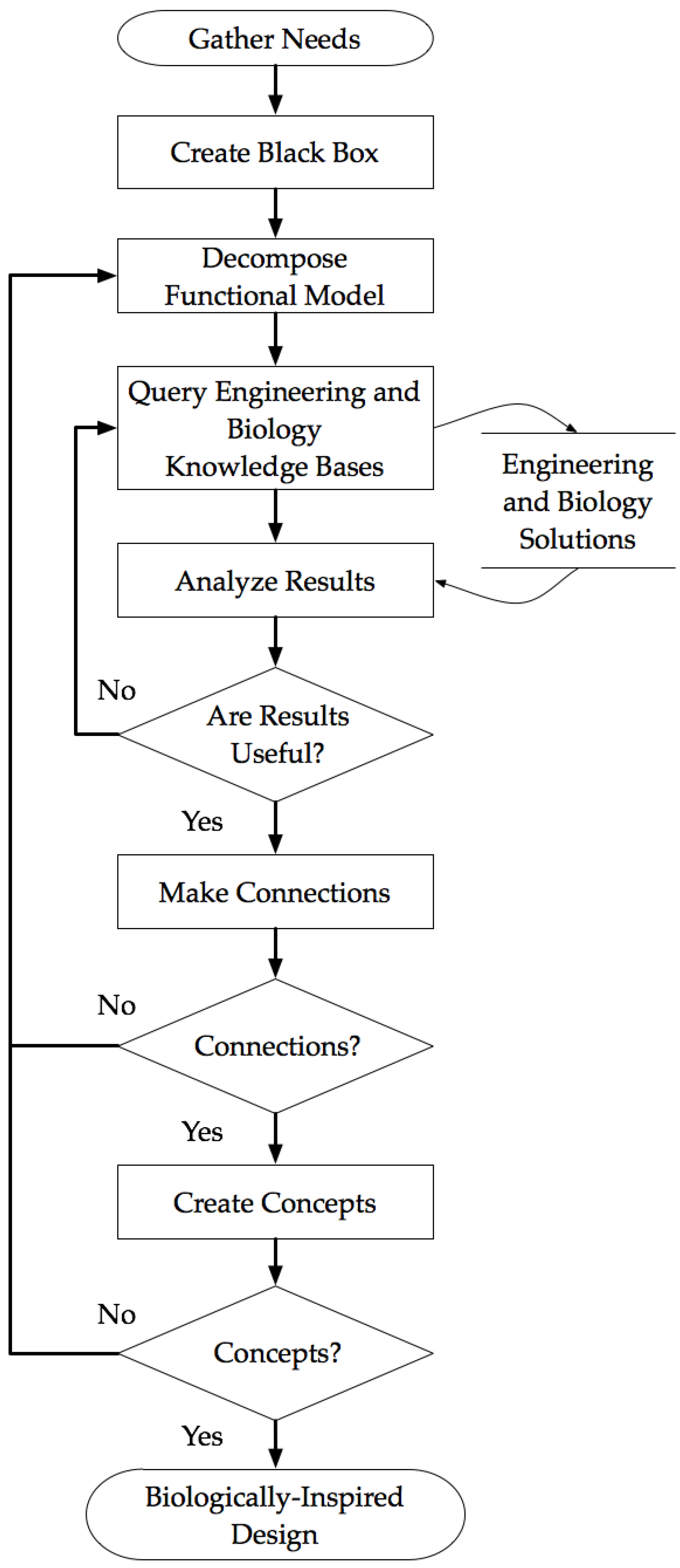
Although prescriptive, the design methodology is also versatile by providing a designer multiple avenues that lead to a biologically-inspired design [49]. One such avenue, stemming from a problem-driven perspective, is given in Figure 1. Following the flow chart of Figure 1 the designer is instructed to decompose a functional model from a black box model, resulting in a conceptual functional model. The conceptual functional model, which describes the desired functionalities of a solution rather than an existing solution, is used to query the engineering and biology knowledge bases. In the event that no connections can be formalized then the designer should return to the query step and try different levels of functions and flows. The same holds true for when no concepts are synthesized.
The systematic biologically-inspired design method aims to inspire more than mechanical and electro-mechanical devices. This research challenges traditional engineering design theory and methodology, which has been reserved for mechanical and electro-mechanical designs to also include purely electrical designs (e.g., sensors).
Figure 1.
Flow chart of biologically-inspired design process.
Mimicking a biological system for the creation of biologically-inspired technology has occurred through several mechanisms [50]. To aid the process of biologically-inspired design it is useful to consider biological systems from different perspectives. Understanding how biological knowledge is interrelated, yet categorizable, offers a designer insight on how to manage the non-engineering domain information such that it can best aid the design process. Researchers discovered [54,55] that biological organisms have three outlets for interacting with a changing environment: physiology, morphology and behavior. A biological organism will adapt new functionality (physiology) or structure (morphology), or learn a new behavior to obey the instinctual actions of reproduce and protect and sustain life. Additionally, researchers noticed similar behavior (e.g., change shape, expose pores, drop offshoot) across multiple biological ranks (i.e., kingdom, phylum, class, order, family, genus, species) that were initiated and carried out for dissimilar reasons; these are termed strategies. Thus, four biological categories to consider when developing a biologically-inspired design are [54,55,56,57]:
- Physiology: concerned with the vital functions and activities of organisms, as opposed to their structure. (e.g., Detect stimuli , parallel sampling)
- Morphology: the form and structure of an organism, and the associations amongst the structures of an organism. (e.g., Porous surface, helical shape)
- Behavior: the sum of the responses of an organism to internal or external stimuli. (e.g., Actuate muscles, change orientation)
- Strategy: a generic behavior that is exhibited among multiple biological ranks to achieve different goals. (e.g., Shape change, up-front processing)
The basic concepts behind sensory physiology and morphology, the fundamental principles and structures of how biological systems relate to their environment, can be adopted as a working model to construct different types of sensor technology. Further, one can consider if direct or indirect mimicry is appropriate for a new design. Meaning not all biomimetic sensors function identically to the biological system being mimicked. Once the biological system is understood, the engineer can decide if directly copying the biological design or mimicry through analogy is the best course of action. Both types of design have been successful and have lead to sensor technology innovations.
4. Results and Discussion
This section details the conceptual design of a chemical sensor following the methodology given in the prior section. The flow chart of Figure 1 that closely follows traditional systematic design is used to develop the biologically-inspired sensor concept. The inspiring biological systems are presented and discussed along with several conceptual design variants. Applications of the final biologically-inspired chemical sensor design along with a discussion on the evolution of the design are also given.
4.1. Step One
For this design, the needs and constraints of the chemical sensing device are derived from the Handbook of Modern Sensors [22]: selectivity (only senses the desired chemical in the presence of other species), quick response time, reusable, and utilizes an indirect sensing mechanism. These needs and constraints are mapped to flows as shown in Table 2 to complete the first step of the methodology.
| Customer Need/Constraint | Functional Basis Flow |
|---|---|
| Selectivity | Status signal |
| Response time | Electrical energy |
| Reusable | Sensing layer (material) |
| Indirect sensing mechanism | Sensing layer (material)/Chemical stimulus (energy) |
4.2. Step Two
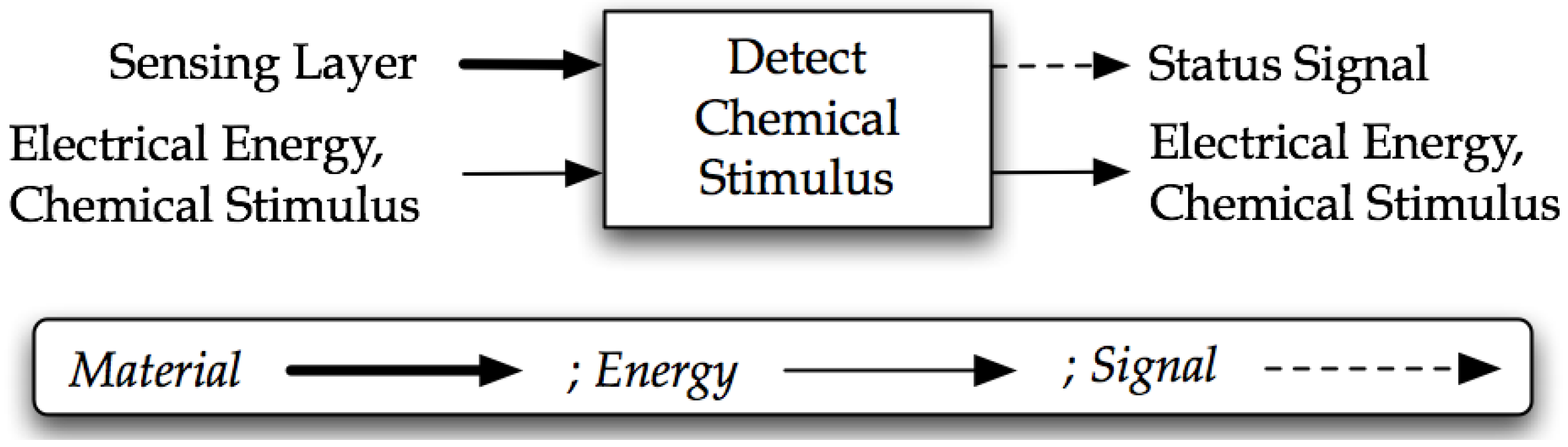
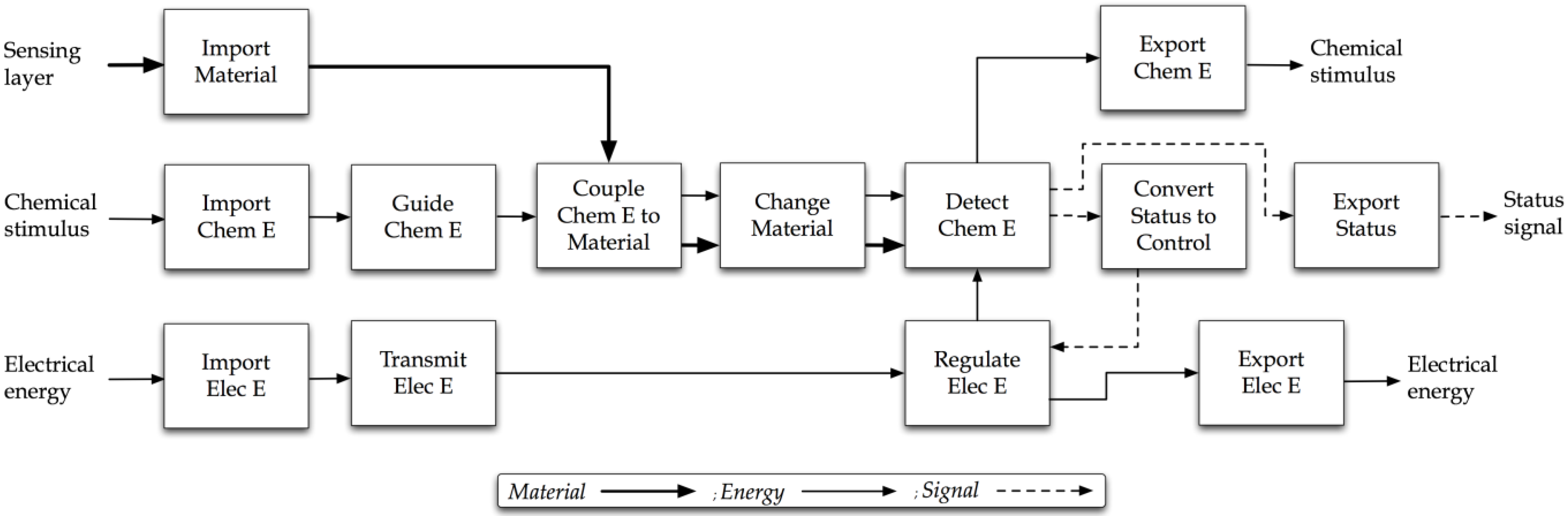
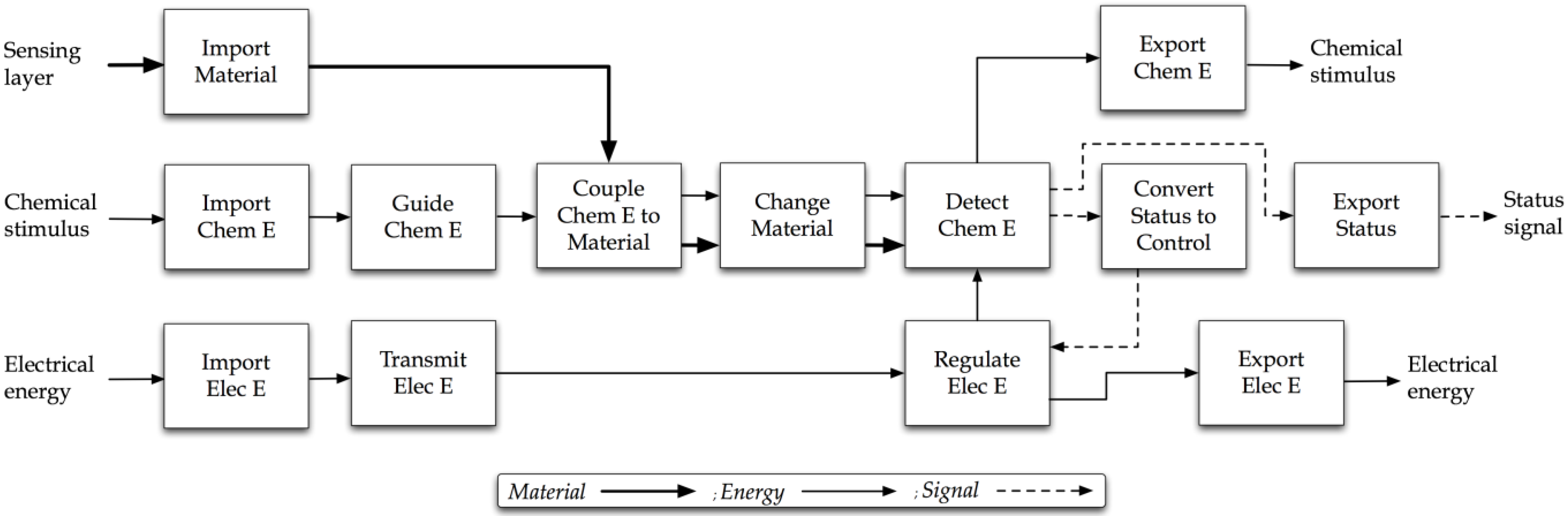
A black box and conceptual functional model of the chemical sensor are needed to satisfy step two of the methodology. The black box model guides the decomposition of the flows into a functional model. The black box model of Figure 2 demonstrates that the overall objective of the design is to detect a chemical stimulus. The decomposed conceptual functional model from the black box and needs mapped to flows is given in Figure 3.
The chemical sensing device black box and conceptual functional models show the generalized form of a chemical stimulus (i.e., chemical energy). This allows the designer to query all possible forms of a chemical stimulus. The device substrate is also generalized as material to include all possible forms of material in the knowledge base. Figure 3 demonstrates the indirect sensing mechanism with the functions of couple and change, and the sensing element or transducer with detect. Electrical energy is utilized to power the sensor and transfer the detection status signal to the device capable of interpreting such signals, such as a computer. The boundary of the conceptual functional model includes the sensing layer and powered sensing element.
Figure 2.
Chemical sensor black box model.
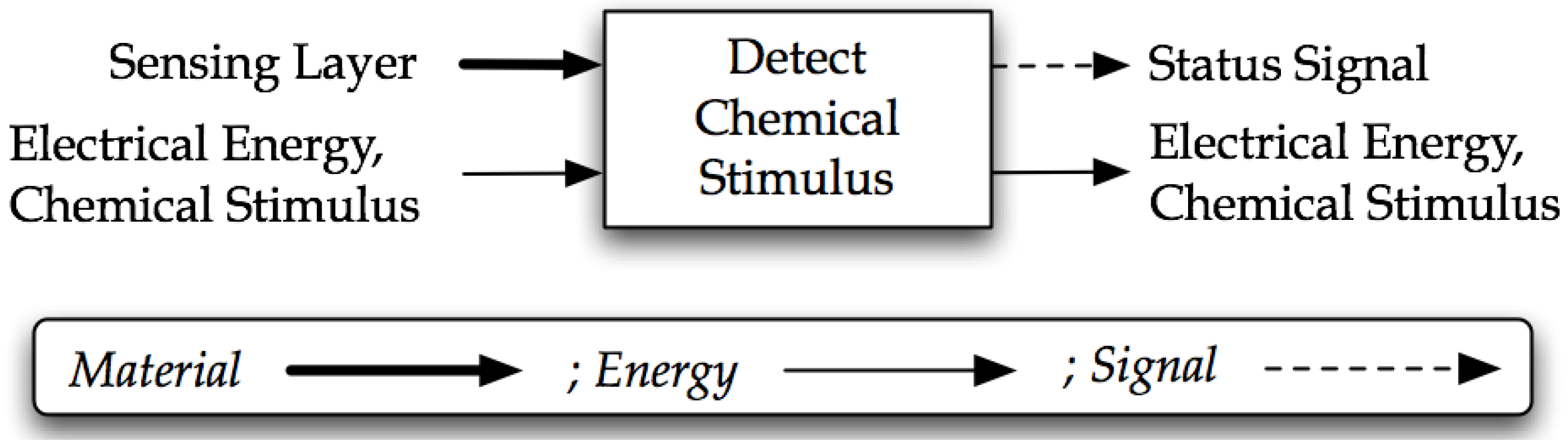
Figure 3.
Chemical sensor conceptual functional model.
4.3. Step Three
Following step three of the methodology, both engineering and biology knowledge bases were queried for solutions to the function/flow pairs. Results of querying the Design Repository (engineering knowledge base) are provided in Table 3. There are 30 biological systems in the Design Repository indexed by engineering function, therefore the solutions for detect chemical energy which are biological are not incorrectly placed. They happen to be the only entries that meet that function/flow pair. Results of querying the biology corpus (biology knowledge base) are provided in Table 4 and Table 5. Over 40 engineering components and 20 biological systems were identified when searching for design inspiration. To reduce the amount of data and increase readability, only the biological corpus results for the sensing mechanism function/flow pairs are presented in Table 4 and Table 5.
| Function/Flow | Engineering Solutions |
|---|---|
| Import/ Material | Housing, reservoir, spring |
| Import/ Chemical Energy | Container, nozzle |
| Guide/ Chemical Energy | Tube |
| Couple/Chemical Energy to Material | Basket, container, iron, nozzle, carburetor, burner, housing |
| Import/ Electrical Energy | Battery, wire, circuit board, motor, cord, switch |
| Transmit/Electrical Energy | Wire, battery contacts, circuit board, compound eye |
| Change/ Material | Blade, impeller, heating element, punch, filter, staple plate, popcorn popper |
| Detect/ Chemical Energy | Fly chemoreceptor, protein, animalia chemoreception, plantae chemoreception |
| Regulate/Electrical Energy | Circuit board, actuator, heating element, switch, resistor, diode |
| Convert/Status to Control Signal | Circuit board |
| Export/ Chemical Energy | Nozzle, bowl, tube, exhaust, bucket |
| Export/ Electrical Energy | Wire, circuit board, cord, switch |
| Export/ Status Signal | LCD screen, circuit board, wire, cord, level, speaker |
| Function/Flow | Biological Corpus Results |
|---|---|
| Change/Material | The resulting change in membrane potential causes the sensory cell either to fire action potentials itself or to change its secretion of neurotransmitter onto an associated cell that fires action potentials. Photosensitivity depends on the ability of rhodopsins to absorb photons of light and to undergo a change in conformation. Dynein is a enzyme that catalyzes the hydrolysis of ATP and uses the released energy to change its shape, thereby generating mechanical force. A gated channel opens when something happens to change the shape of the protein. Microtubules change the shapes of cells and move cells by polymerizing and depolymerizing the protein tubulin. Cell movement is generated by two structures, microtubules and microfilaments, both of which consist of long protein molecules that can change their length or shape. Actin microfilaments can change the shape of a cell simply by polymerizing and depolymerizing. Nets of actin and myosin beneath the cell membrane change a cell’s shape during endocytosis. Chromatophores are pigment-containing cells in the skin that can change the color and pattern of the animal. Because the troponin is bound to the tropomyosin, this conformational change of the troponin twists the tropomyosin enough to ex-pose the actin-myosin binding sites. The Ca2+ ions bind to troponin and change its conformation, pulling the tropomyosin strands away from the myosin binding sites on the actin filament. Because the viruses are too large to go through these channels, special proteins bind to them and help change their shape so that they can squeeze through the pores. Guard cells are modified epidermal cells that change their shape, thereby opening or closing pores called stomata, which serve as passageways between the environment and the leaf's interior. The silk protein that stretches contains amino acids that allow it to curl into a spiral, and when these spirals associate into silk fibers, they can slip along each other to change the fiber’s length. Ionizing radiation (X rays) produces highly reactive chemical species called free radicals, which can change bases in DNA to unrecognizable (by DNA polymerase) forms or break the sugar-phosphate backbone, causing chromosomal abnormalities. |
| Function/Flow | Biological Corpus Results |
|---|---|
| Detect/Chemical Energy | Smell and taste receptors, for example, are epithelial cells that detect specific chemicals. Most sensory cells possess a membrane receptor protein that detects the stimulus and responds by altering the flow of ions across the plasma membrane. Eukaryotic cells carry out cellular respiration in their mitochondria, which are located in the cytoplasm-an aqueous medium. Chemoreceptors are responsible for smell, taste, and the monitoring of aspects of the internal environment such as the level of carbon dioxide in the blood. Crabs and flies, for example, have chemoreceptor hairs on their feet; they taste potential food by stepping in it. After a fly tastes a drop of sugar water by stepping in it, its proboscis (a tubular feeding structure) extends to feed. Since both AT and GC pairs obey the base-pairing rules, how does the repair mechanism “know” whether the AC pair should be repaired by removing the C and replace it with T, for instance, or by removing the A and replacing it with G? The repair mechanism can detect the "wrong" base because a newly synthesized DNA strand is chemically modified some time after replication. Whether the receptor protrudes from the plasma membrane surface or is located in the cytoplasm, the result of ligand binding is the same: the receptor protein changes its three-dimensional structure and initiates a cellular response. So the unique drug resistance phenotype of the cells with recombinant DNA (tetracycline-sensitive and ampicillin-resistant) marks them in a way that can be detected by simply adding ampicillin and/or tetracycline to the medium surrounding the cells. This receptor is located at the plasma membranes of vertebrate skeletal muscle cells and binds the ligand acetylcholine, which is released from nerve cells. |
4.4. Step Four
Analyzing the biological solutions for the change material function/flow pair reveals some very interesting, and inspiring, biological systems. The query results are quite informative, which allows for quick evaluation of the biological systems. Additionally, a biological strategy emerges. Of the listed biological systems, the change made tends to be physical through shape or conformation change. Shape or conformation change means that the shape or structure of something is changing or the atoms in a molecule may convert between any adopted spatial arrangements. The biological strategy connects with the engineering principle of stress and strain through mechanical deformation.
The biological systems returned for the detect chemical energy function/flow pair are primarily different types of cells that detect specific stimuli. The biological corpus query results in this case are less informative, thus the biological systems returned from the Design Repository are also considered. Many of the biological systems are types of sensory cells, therefore instead of focusing on a specific query result a category of the query results is considered. Further, both knowledge bases returned a fly chemoreceptor result, which is relevant to the design problem.
Following step four, the biological systems are investigated further to determine which will be useful for the design. For change material, troponin and tropomyosin, guard cells and the silk protein as shown in Figure 4 offer strong connections with engineering and will be used for the conceptual design of the sensor. For detect chemical energy, sensory cells and fly chemoreceptor (antenna) will be used for the conceptual design of the sensor.
Figure 4.
Inspiring biological systems, (a) guard cells, (b) troponin and tropomyosin, (c) silk–protein (Adapted from: (a) [58], (b) [54], (c) [55]).
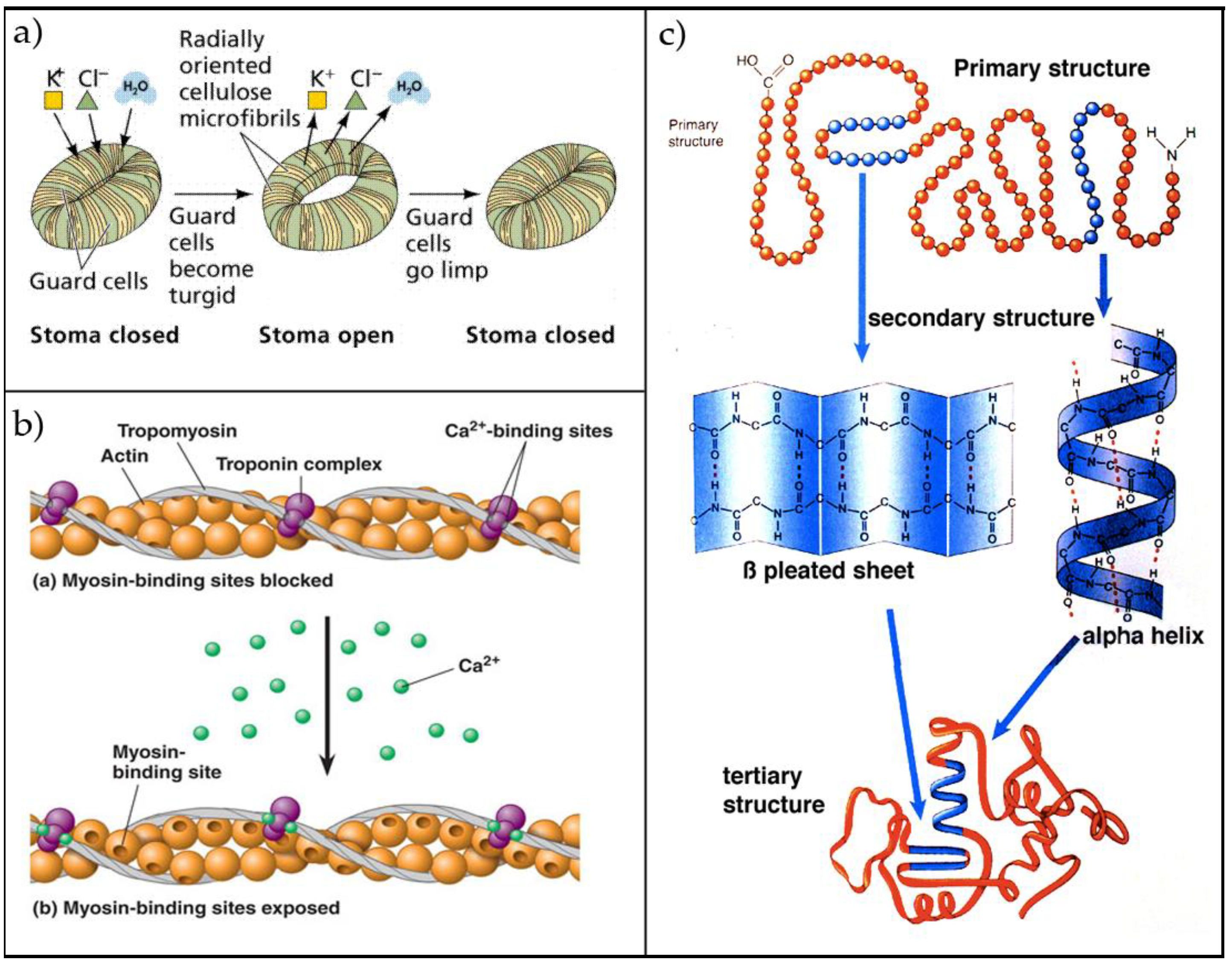
Guard cells (Figure 4a) are modified epidermal cells (cells on the surface of a leaf or other plant tissue where bark is absent) that change shape to open and close pores called stomata. Stomata serve as passageways between the environment and the leaf’s interior. Carbon dioxide can enter and oxygen can leave when stomata are open, which are activated by light and low levels of CO2. A proton pump of potassium and hydrogen ions governs the opening and closing of the guard cell pores. This biological system is analogous to chemomechanical polymers and electroactive polymers that change shape in the presence of a chemical species and electrical current, respectively [59,60].
Troponin, a polypeptide chain complex found on an actin filament, is bound to tropomyosin, a protein with two elongated strands that run the length of an actin filament (Figure 4b). When calcium ions bind to troponin, a conformation change twists the tropomyosin to expose actin binding sites, which allows myosin to interact with actin to cause muscle contraction [54]. Learning more about the physiology of muscle contractions conjures up thoughts of cantilevers and bi-metallic strips that are used in thermostats. The morphology of the biological system is a spiral, which is similar to springs or nano springs [61].
The silk protein curls into a spiral at rest and when stretched the silk fibers slip along each other which provide strength and flexibility. The fibers are made of amino acids that fold the individual proteins into flat sheets with jagged ends, similar to ratchets that fit parallel sheets together so the fibers are hard to pull apart. The properties associated with a precise sequence of amino acids, the primary structure, determine how the protein can twist and fold. Each protein adopts a specific stable structure of secondary (curling or pleating), tertiary (folding or bending) and quaternary (special subunits) states that distinguishes it from every other protein (Figure 4c). This biological system offers three morphological analogies. The secondary structure of the protein links to springs or nano springs [61]. The tertiary structure leads to connections with branched and folded (zig-zag) morphologies while the overall combinations lead a to modular morphology.
Sensory receptor cells are activated when they detect a stimulus, such as pressure, chemicals, temperature, electric fields, light, etcetera [46,62]. The stimulus will cause a depolarization to occur in the sensory cell and responds by altering the flow of ions across the plasma membrane to generate a receptor potential. If the receptor potential is large enough, i.e., meets a threshold, an action potential is triggered which will send a signal to the central nervous system. A change in potential is analogous to a change in resistance, or conductance and the piezoelectric effect, which are common mechanisms for sensors.
The fly chemoreceptor (antennae) morphology offers inspiration at multiple levels. At the organism level, the biological system inspires a “stick-like” sensing element. Analogous engineered components are carbon nano tubes and nanowires. Morphology of the fly antennae at a lower level, the cellular level, inspires a porous sensing element that mimics the receptor sites on the cell membrane surface [48,63]. Analogous porous engineered components are porous silicon, nano-imprinted silicon and aluminum oxide templates. These analogous components are nano or micro sized structures. Although the size of the sensing element was not specified in the needs, these morphological analogies are advantageous.
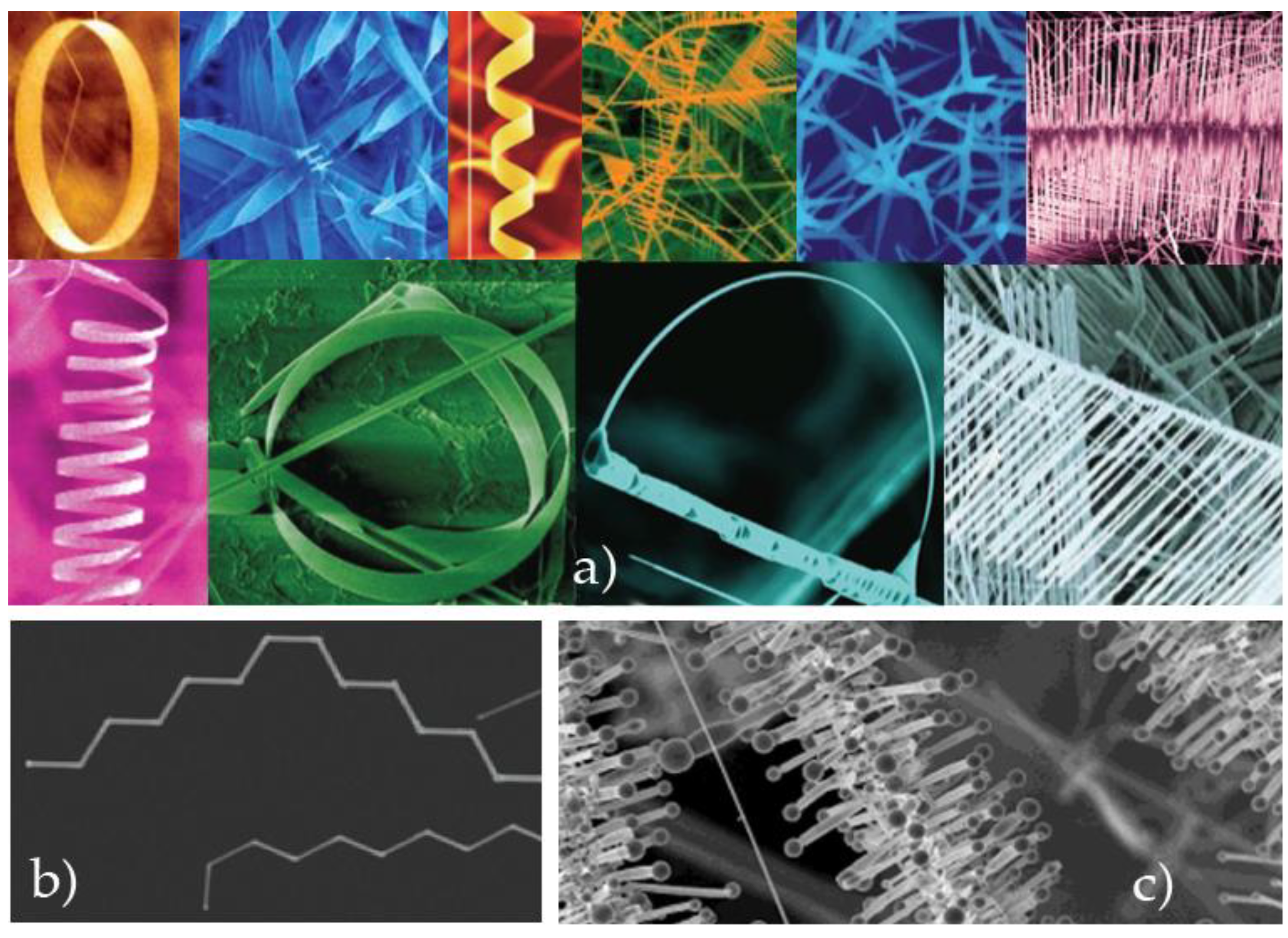
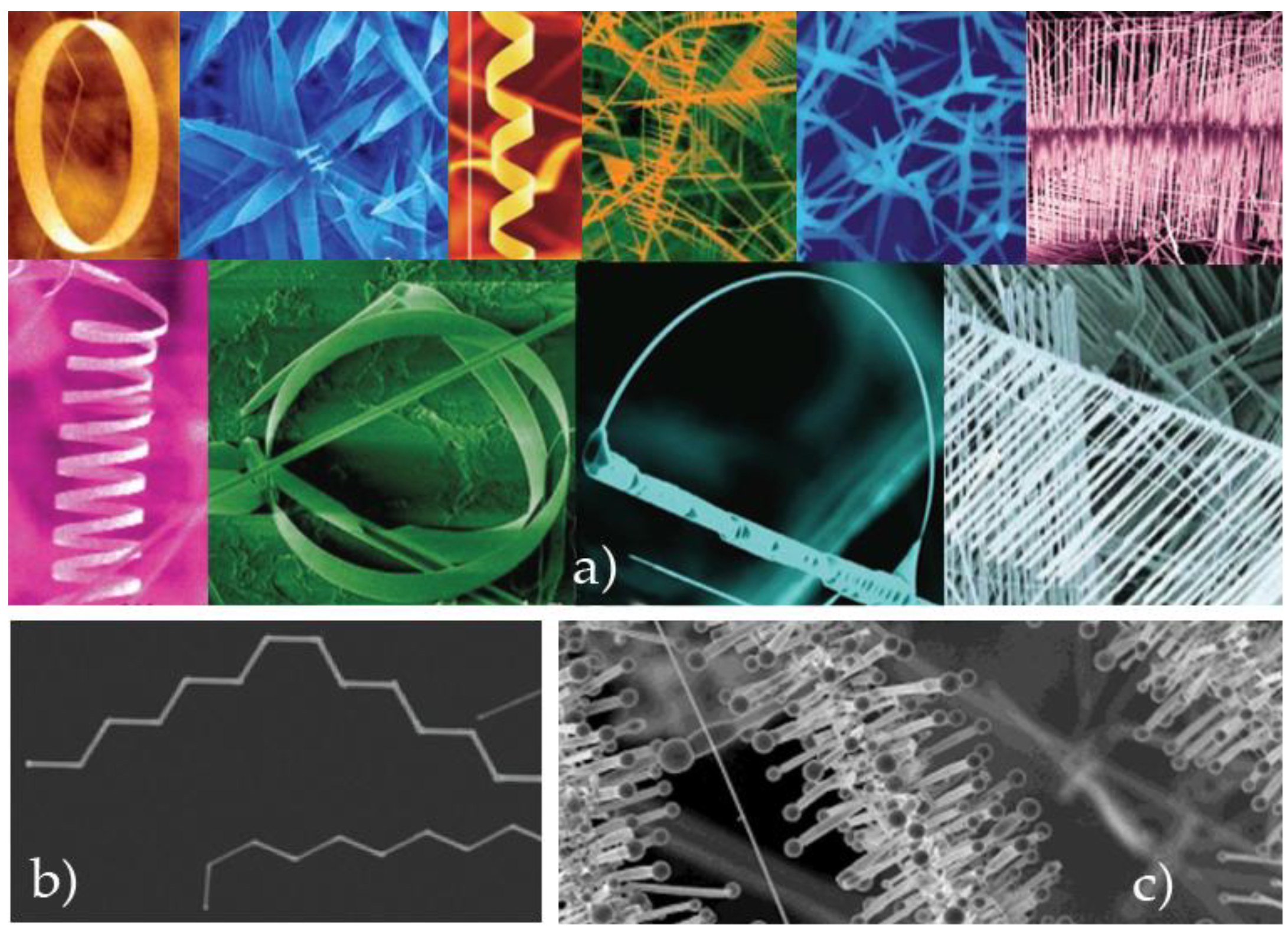
Nano structures for sensing offer many advantages: sensitivity, large surface-to-volume ratio, low power, fast response, fast calibration, surfaces can be functionalized and metal oxides work well at elevated temperatures [64,65,66]. Several morphologies have been created with nanowires as shown in Figure 4. A group of researchers at Georgia Tech University have fabricated nanowires and nanobelts in several shapes: spiral, spring, comb (branches on only one side), ring, propellers (equidistant branches), helix, saw (branches on opposite sides), bows and tetrapoles (Figure 5a) [61,67]. Zig-zig or kinked nanowire structures have also been fabricated (Figure 5b) [68]. Other researches have created ribbons coated with perpendicular branching structures that look like holiday tinsel (Figure 5c) [69].
Figure 5.
Existing nanowire morphologies, (a) spiral, spring, comb, ring, propellers, helix, saw, bows, tetrapoles, (b) zig-zig or kinked, (c) tinsel. (adapted from: (a) [61,67], (b) [68], (c) [69]).
From the connections made between engineering and biology many concept variants are possible stemming from insect chemoreceptor morphology, physiology of guard cells, physiology of the silk protein, physiology and morphology of troponin and tropomyosin, physiology of sensory cells and the biological strategy of change shape. Concept synthesis can involve one or more of these attributes.
4.5. Step Five
Following step five of the methodology, the information from steps three and four are synthesized into conceptual design variants. The following paragraphs walk the reader through the evolution of the biologically-inspired chemical sensor design.
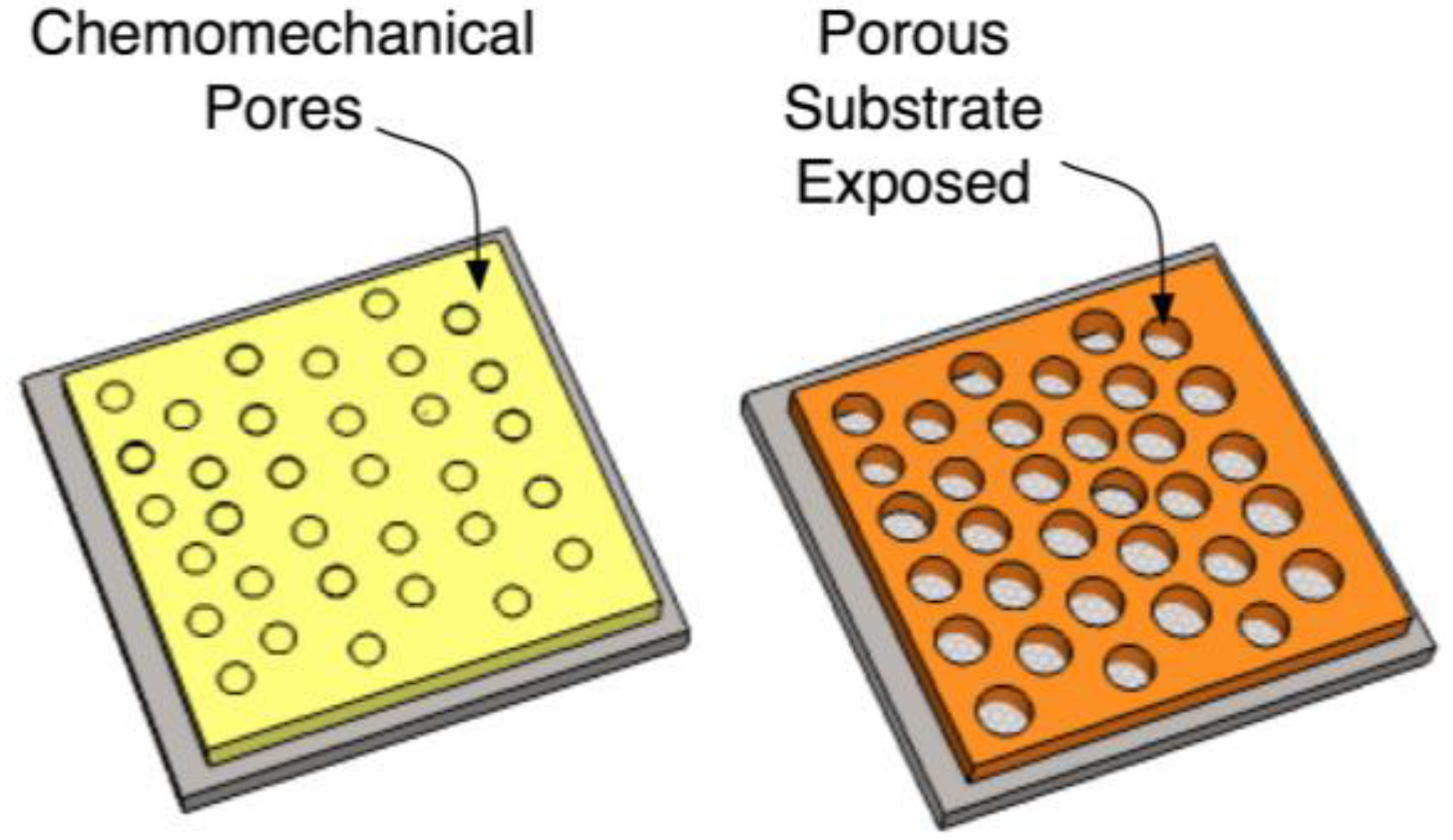
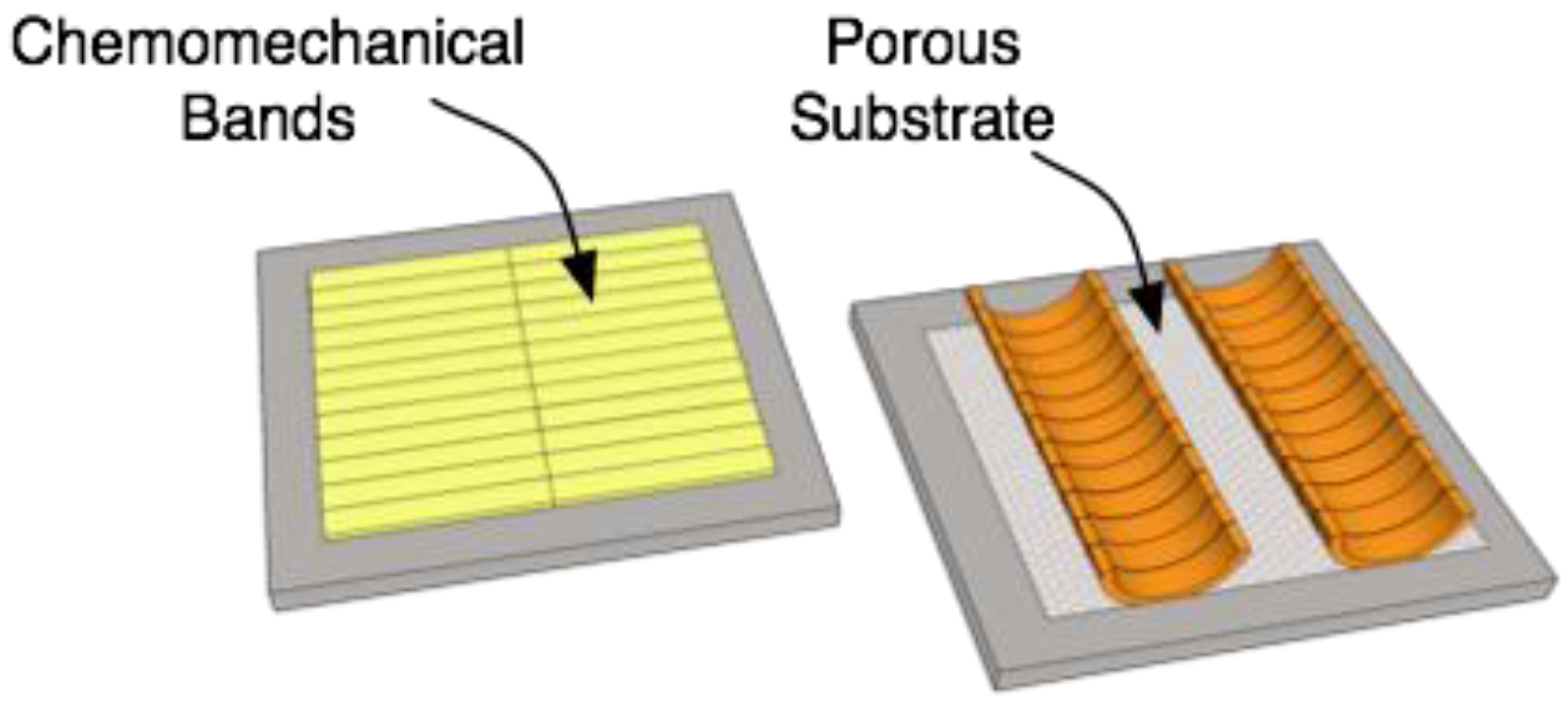
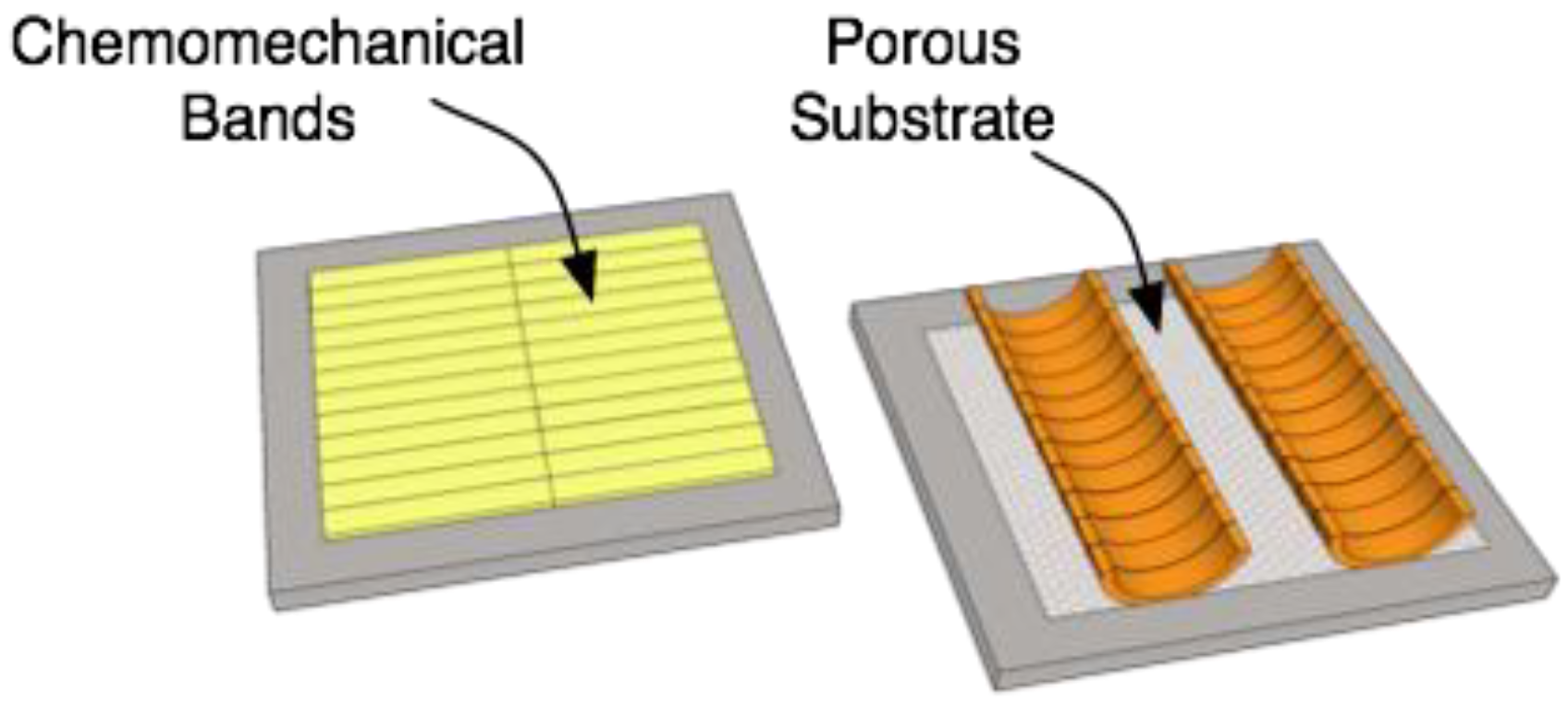
Combining the strategy of change shape, insect chemoreceptor porous morphology and the physiology of guard cells leads to the concept variant shown in Figure 6. This concept variant uses a chemomechanical polymer (shown in yellow) as the sensing layer covering a porous semiconductor. When the desired chemical species interacts with the polymer it would contract to open pores (shown in orange to denote a change in the chemomechanical polymer), similar to the guard cells and shape change strategy. The sensing element, however, would come into direct contact with the chemical species needed to change the output signal and does not meet the indirect sensing requirement.
Combining the strategy of change shape, insect chemoreceptor porous morphology and the physiology of troponin and tropomyosin leads to the concept variant that directly copies the interaction of troponin and tropomyosin. Figure 7 shows a concept sketch. This concept variant uses a chemomechanical polymer (shown in yellow) as the sensing layer covering a porous semiconductor. When the desired chemical species interacts with the polymer it would curl up to expose the sensing element below (shown in orange to denote a change in the chemomechanical polymer), similar to troponin and tropomyosin and the shape change strategy. Again, while this concept is interesting, the sensing element would come into direct contact with the chemical species needed to change the output signal and does not meet the indirect sensing requirement.
Figure 6.
Concept variant inspired by guard cells.

Figure 7.
Concept variant inspired by troponin and tropomyosin.
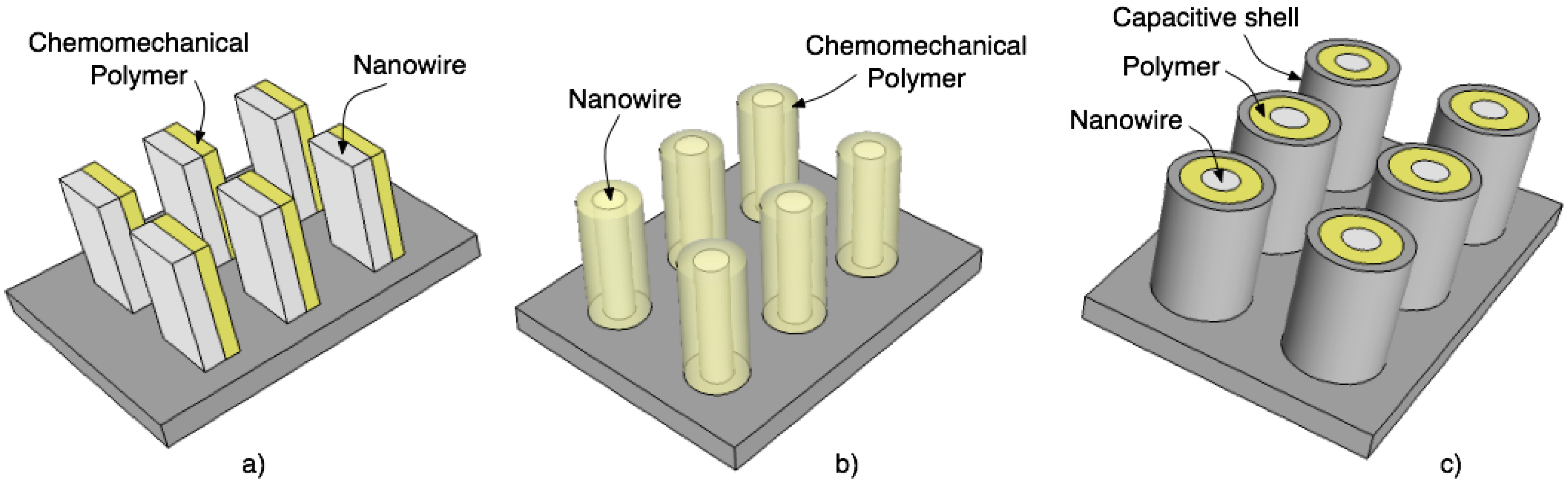
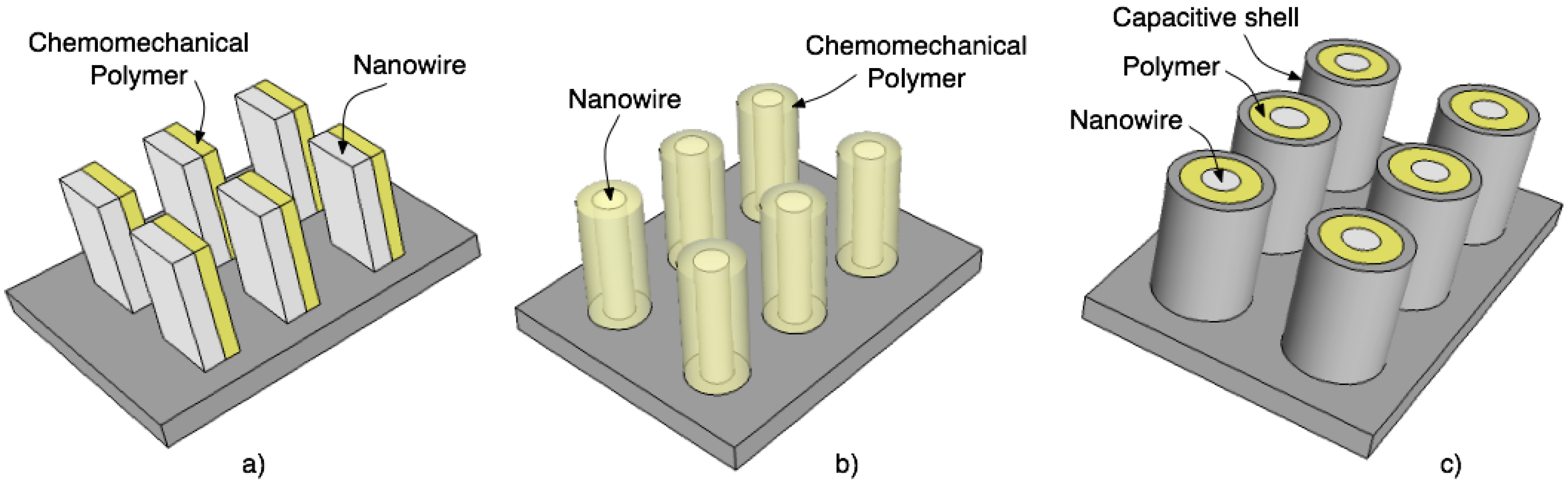
Revisiting the combination of the change shape strategy, insect chemoreceptor morphology and the physiology of troponin and tropomyosin leads to a concept variant that emulates the cantilever with a chemically activated polymer on one side (shown in yellow) as shown in Figure 8a. Ideally, the cantilevers would be vertical to take advantage of existing nanowire technology with a single-sided coating of a chemomechanical polymer tuned to the desired chemical species. This concept fulfills the indirect sensing requirement, if the strain on the cantilever can be measured. Cantilever structures with chemically activated coatings or binding sites have been fabricated and successfully implemented [66,70,71]. The mechanics of nanowires have also been thoroughly researched [70,72,73,74] and shows that they can handle a great deal of bending. Transduction of the deformation and fabrication of a single-sided coating are two concerns for this type of design. Signal generation by bending a vertical nanowire is currently an unsolved problem. One theoretical approach is to exploit the quantum wells created in the heterojunction of the substrate the nanowires are grown on [75,76,77,78]. An electron gas in the quantum well changes resistance proportional to the deflection of a nanowire. Considering fabrication capabilities, coating only one side of a nanowire could be nearly impossible. However, dip-coating an array of vertical nanowires with a chemomechanical polymer or using a deposition process would be feasible, and results in radially coated nanowires (shown in yellow) as shown in Figure 8b.
Radial nanowires exist and generally involve multiple shells of different materials [64,79,80,81]. Although the manufacturing process is feasible, would a completely coated nanowire result in a significant mechanical deformation to measure by strain? An alternative is to add another shell over the chemomechanical polymer (shown in yellow) to create a cylindrical capacitor (Figure 8c). This design would use the polymer as a dielectric and would produce a change in signal as the target is absorbed into the polymer, which would expand or contract. Would the polymer be able to absorb a significant amount of a desired chemical species to generate a signal? Assuming worst case, this design would not be adequate.
Figure 8.
Evolution of second concept variant inspired by troponin and tropomyosin.
4.6. Final Concept
Prior designs had a high degree of complexity due to the number of biological systems being considered during concept generation. Reducing the number of biological systems and considering only the physiology of guard cells and the morphology of troponin and tropomyosin results in an elegant design.
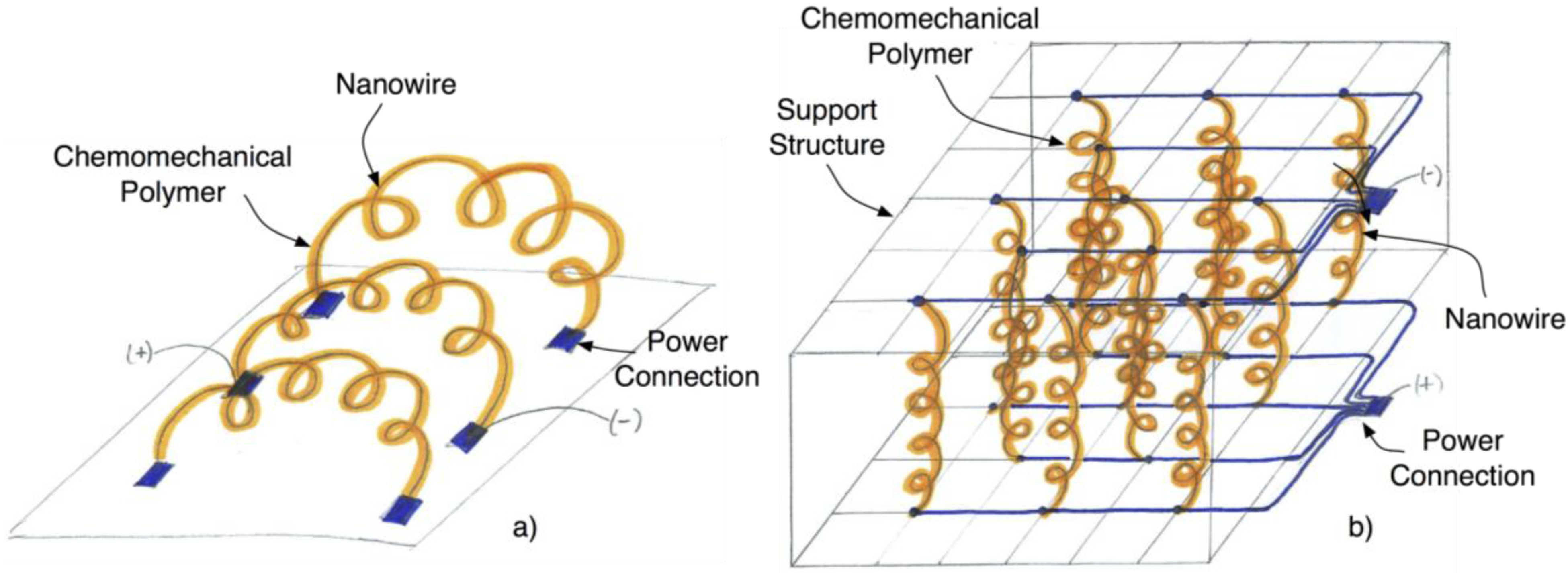
The morphology of troponin and tropomyosin (as well as the secondary structure of the silk protein) directly relates to sensor design that incorporates a nanospring. The physiology of guard cells directly relates to the expansion and contraction of chemomechanical polymers. Combining the analogies results in a spiral nanowire that is coated with the chemomechanical polymer (shown in orange) as shown in Figure 9. Two configurations can be considered: connected at both ends to a substrate (Figure 9a) or suspended between two grids (Figure 9b) that allow current to flow through the nanostructure. This design fulfills the indirect sensing requirement by completely coating the nanowire with the polymer that contracts or expands in the presence of the desired chemical species. Also, the spiral shape allows the mechanical action of the polymer to be maximized. The change in the polymer would be proportional to the concentration of the chemical species and would change the geometry of the nanospring (secondary sensing layer) and its electrical properties to generate a detection signal. This behavior is also analogous to the sensory cell.
Nanosprings [61,82] that exhibit piezoelectric properties have been synthesized with zinc oxide (ZnO), and could be a candidate for this nano-scale sensor design. Additionally, the flexibility and toughness of the nanosprings are extremely high so that they can be bent or twisted repeatedly without fracture [82]. The chemomechanical polymer would be non-conducting and would not interfere with the electrical properties of the nanospring. The design also follows the biological sensing strategy of “up-front” processing, which is achieved through filtering of the stimuli via mechanical means. The chemomechanical polymer acts as the indirect sensing layer and requires a threshold to be met by the desired chemical species to induce expansion of the polymer. Mechanical filtering reduces the chance of signal error and assists with providing selectivity. The biologically-inspired chemical sensor design utilizes available materials in a unique way to form a simple and elegant design.
Figure 9.
Final biologically-inspired chemical sensor designs.
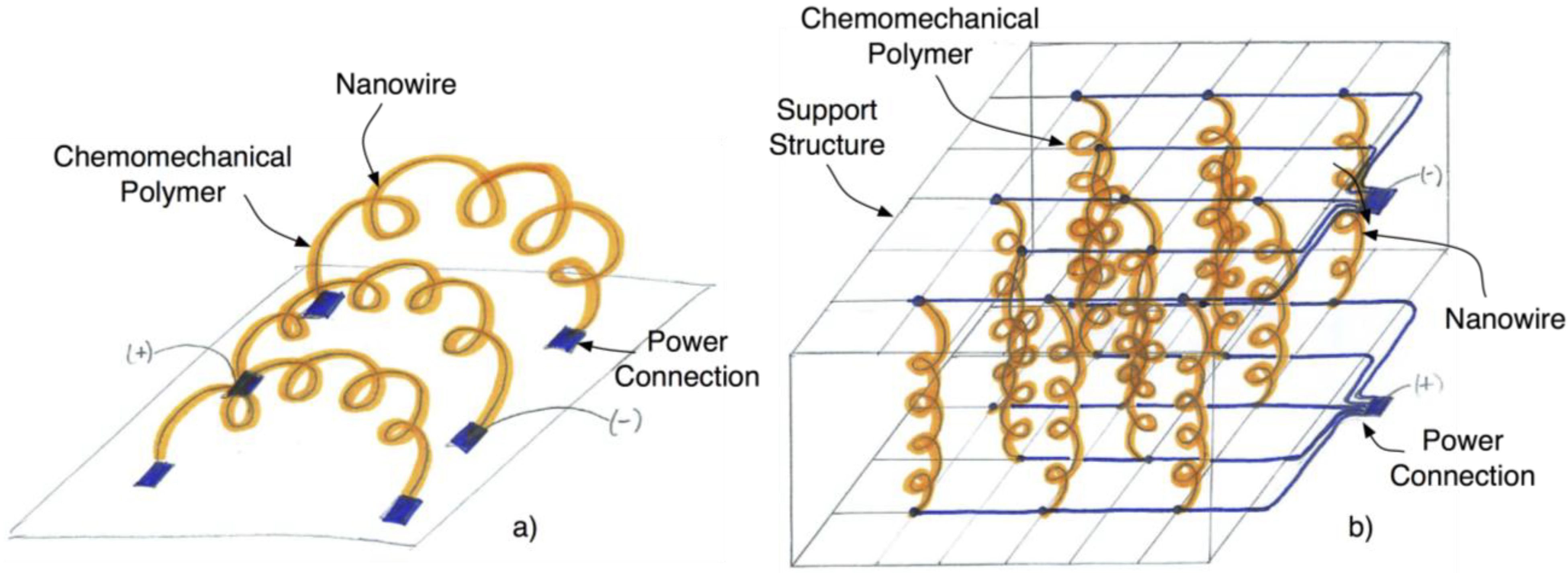
Considering manufacturability, the nanowires connected at both ends to a substrate (Figure 9a) could most likely utilize conventional microelectronic assembly and then be suspended into different polymer solutions [83] or use a polymer chemical vapor deposition technique [84] to coat the nanosprings. Further investigation is necessary to determine if the sensor elements suspended between two grids could be fabricated on the nano-scale. Laterally bridged nanowires across trenched electrodes useful for nanosensor arrays [85] and ZnO nanowire field-effect transistors that have gas sensing properties [86,87] have been successfully fabricated and offer insight into the suspension of nanowires.
To finish the concept generation step, the designer would need to revisit the functional model and engineering component results to choose components for the reminder of the design and integrate those into the conceptual design. Once components are chosen the next phase of the design process, embodiment [31], can begin.
4.7. Applications of Biologically-Inspired Chemical Sensor
Applications of the biologically-inspired chemical sensor are those that aim to improve the quality of life, and include environmental sensing [88,89], breath analysis for diseases [90,91] and point-of-care testing [92,93]. These areas require accurate responses for what could be critical situations. The nano-scale sensor design could be embedded in products, such as tail pipes and vents to monitor emission or air quality, breath tubes for non-invasive diagnosis of diabetes, liver disease, or cancer, or other medical devices for point-of-care diagnosis. Additionally, an array of sensing elements provides the opportunity to monitor multiple chemical species within one device. Nanotechnology enabled sensors could assist with creating disposable sensors for medical or environmental applications that are economical.
4.8. Evolution of Biologically-Inspired Chemical Sensor Design
While the design process used to develop the biologically-inspired sensor is prescriptive and systematic, the process still relies on the creativity of the designer to make the leap between the domains and discover value in the identified biological systems. “The most challenging problem in design…lies in making the creative leap between problem definition and solution concept” [94]. Design is inherently iterative and only when there are alternatives to judge against can the designer determine which is a better design. This was evidenced by the five initial designs. While the designs were interesting and could be linked to current literature, they were determined through evaluation to not successfully solve the problem, which facilitated the emergence of the sixth, and final design. The evolution of the chemical sensor design was an important part of the design process.
The evolution occurred through considering the four biological categories of physiology, morphology, behavior and strategy of the identified biological systems. This analysis leads to determining the attributes of the identified biological systems that could be useful for the design as well as higher level similarities across the inspiring systems. With this knowledge, connections were made to the engineering domain that was used to synthesize multiple concepts. Continuously applying the inspiring biological systems toward the chemical sensor design and assessing the results was not only key in the creation of multiple concept variants but good design practice as well. Going beyond the identified biological systems and considering the strategies of biological sensing mechanisms when developing a sensor concept based on function helps to lead the designer down a biologically-inspired path rather than purely copying the biological system. This assisted with realizing the unnecessary complexity in the initial five designs.
Focusing on the two function/flow pairs that need to be solved to develop a biologically-inspired sensor, change material and detect chemical energy, the identified biological system attributes were narrowed down to only two. The two that were chosen pair well together. The physiology of the guard cell amplifies the form, which is highly coupled to function in biological systems, of the tropomyosin in the sensor design therefore creating multi-functional components. Biology tends to be multi-functional and interdependent, while engineering emphasizes single function with independence.
Although tropomyosin was not one of the identified biological systems for the function of detect its physiology involves the detection of myosin to allow muscles to contract and its morphology is closely linked to both the silk protein and the fly chemoreceptor through nanowires. The spiral shape that twists and relaxes inspired a substrate that could double as the secondary sensing mechanism, while taking advantage of “up-front” processing through mechanical means. Overall, the final chemical sensor concept employs multi-functional components in which form is highly coupled to function to create a simple and elegant design.
5. Conclusions and Future Work
Traditional sensor schemes involve few sensing devices and require a significant amount of computing power to handle the data created. Nature demonstrates robust sensing with minimal processing. Adapting features and characteristics of biological systems can significantly advance the design of sensors, transducers and instrumentation.
In this paper, the conceptual design of a biologically-inspired chemical sensor based on guard cells and tropomyosin following a systematic design process was presented. Following this approach, five biological systems were reviewed in detail, which led to the design of an innovative chemical sensor. Connections formed between the inspiring biological systems and technical analogs for multiple chemical sensor designs were presented and discussed. Through an iterative process of applying biological inspiration singly and evaluating technological feasibility the chemical sensor design evolved into an elegant and simple design that leverages the biological sensing strategy of “up-front” processing. Pursuing this concept could offer an embeddable, and possibly low-cost, solution to the areas of environmental sensing and non-invasive health care.
The systematic design methodology as well as considering the physiology and morphology of biological systems assisted with making the leap to the innovative chemical sensor design. Functional abstraction promotes creativity and removes the component boundaries that engineers all too often impose upon themselves. Methods for finding biological inspiration or exploring the biological domain are available, but it is up to engineers to embrace those methods. Inspiration from biology, however, is not a necessity for novel engineering design, but it is a nice addition to the engineer’s toolbox.
Future work includes quantifying the design parameters for both the chemomechanical polymer and the nanospring to enable prototyping and prototype testing. Investigation of the molecule size of the chemical species of interest is necessary to determine what can and cannot be detected by the chemomechanical polymer as well as threshold limitations. Calculation of the force required to elongate the nanospring structure as well as the spring constant of the structure in relation to the material is necessary to determine the thickness of the polymer needed to produce a change as well as scaling limitations.
Conflicts of Interest
The author declares no conflict of interest.
References
- Rolfe, P. Sensors and systems that mimic nature. Eng. Sci. Educ. J. 1997, 6, 155–166. [Google Scholar] [CrossRef]
- Stroble, J.K.; Stone, R.B.; Watkins, S.E. An overview of biomimetic sensor technology. Sens. Rev. 2009, 28, 112–119. [Google Scholar] [CrossRef]
- Del Valle, M. Bioinspired sensor systems. Sensors 2011, 11, 10180–10186. [Google Scholar] [CrossRef]
- Hussain, M.; Wackerlig, J.; Lieberzeit, P. Biomimetic strategies for sensing biological species. Biosensors 2013, 3, 89–107. [Google Scholar] [CrossRef]
- Ciosek, P.; Wróblewski, W. Potentiometric electronic tongues for foodstuff and biosample recognition—An overview. Sensors 2011, 11, 4688–4701. [Google Scholar] [CrossRef]
- Biggins, P.H.J.K.A. Bio-Inspired Materials and Sensing Systems; RSC Publishing: Cambridge, UK, 2011. [Google Scholar]
- Bar-Cohen, Y. Biomimetics Biologically Inspired Technologies; CRC/Taylor & Francis: Boca Raton, FL, USA, 2006. [Google Scholar]
- Brebbia, C.A. Design and Nature III: Comparing Design in Nature with Science and Engineering; WIT: Boston, MA, USA, 2006. [Google Scholar]
- Brebbia, C.A.; Collins, M.W. Design and Nature II: Comparing Design in Nature with Science and Engineering; WIT: Boston, MA, USA, 2004. [Google Scholar]
- Brebbia, C.A.; Sucharov, L.J.; Pascolo, P. Design and Nature: Comparing Design in Nature with Science and Engineering; WIT: Boston, MA, USA, 2002. [Google Scholar]
- Bleckmann, H.; Schmitz, H.; von der Emde, G. Nature as a model for technical sensors. J. Comp. Physiol. A Neuroethol. Sens. Neural Behav. Physiol. 2004, 190, 971–981. [Google Scholar] [CrossRef]
- Barth, F.G.; Humphrey, J.A.C.; Secomb, T.W. Sensors and Sensing in Biology and Engineering; Springer: Wien, NY, USA, 2003. [Google Scholar]
- Toko, K. Biomimetic Sensor Technology; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Martin-Pereda, J.A.; Gonzalez-Marcos, A.P. A New Approach to Optical Fibre Sensing Techniques Based on the Sensory Systems of Living Bodies. In Handbook of Optical Fibre Sensing Technology; López-Higuera, J.M., Ed.; Wiley: New York, NY, USA, 2002. [Google Scholar]
- McGruer, N.E.; Ayers, J.; Davis, J.L.; Rudolph, A. Biomimetic Flow and Contact/Bending Mems Sensors. In Neurotechnology for Biomimetic Robots; The MIT Press: Cambridge, MA, USA, 2002; pp. 13–30. [Google Scholar]
- Krijnen, G.J.M.; Lammerink, T.S.J.; Wiegerink, R.J.; Casas, J. Cricket Inspired Flow-Sensor Arrays. In Proceedings of IEEE Sensors, Atlanta, GA, USA, 28–31 October 2007.
- Wu, W.-C.; Schenato, L.; Wood, R.J.; Fearing, R.S. Biomimetic Sensor Suite for Flight Control of a Micromechanical Flying Insect: Design and Experimental Results. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 14–19 September 2003.
- Van der Spiegel, J.; Nishimura, M. Biologically Inspired Vision Sensor for the Detection of Higher-Level Image Features. In Proceedings of the 2003 IEEE Conference on Electron Devices and Solid-State Circuits, HongKong, 2003; pp. 11–16.
- Jaxx, K.N.; Hannaford, B. Mechatronic design of an actuated biomimetic length and velocity sensor. IEEE Trans. Rob. Autom. 2004, 20, 390–398. [Google Scholar] [CrossRef]
- Kuc, R. Biomimetic sonar and neuromorphic processing eliminate reverberation artifacts. IEEE Sens. J. 2007, 7, 361–369. [Google Scholar] [CrossRef]
- Skordos, A.; Chan, P.H.; Vincent, J.F.V.; Jeronimidis, G. A novel strain sensor based on the campaniform sensillum of insects. Phys. Trans. R. Soc. Lond. A 2002, 360, 239–253. [Google Scholar] [CrossRef] [Green Version]
- Fraden, J. Handbook of Modern Sensors: Physics, Designs, and Applications; Springer: New York, NY, USA, 2004. [Google Scholar]
- Wilson, J.S. Sensor Technology Handbook; Elsevier: Boston, MA, USA, 2005. [Google Scholar]
- Frank, R. Understanding Smart Sensors; Artech House: Norwood, MA, USA, 1996. [Google Scholar]
- Webster, J.G. The Measurement, Instrumentation, and Sensors Handbook; CRC Press in Cooperation with IEEE Press: Boca Raton, FL, USA, 1999. [Google Scholar]
- Stillwell, H.R. Electronic Product Design for Automated Manufacturing; Marcel Dekker: New York, NY, USA, 1989. [Google Scholar]
- Ward, A.E.; Angus, J.A.S. Electronic Product Design; Chapman & Hall: London, UK, 1996. [Google Scholar]
- Haskell, B. Portable Electronics Product Design & Development: For Cellular Phones, Pdas, Digital Cameras, Personal Electronics and More; McGraw-Hill Professional: New York, NY, USA, 2009. [Google Scholar]
- Ulrich, K.T.; Eppinger, S.D. Product Design and Development; McGraw-Hill/Irwin: Boston, MA, USA, 2004. [Google Scholar]
- Ullman, D.G. The Mechanical Design Process, 4th ed.; McGraw-Hill, Inc.: New York, NY, USA, 2009. [Google Scholar]
- Pahl, G.; Beitz, W.; Feldhusen, J.; Grote, K.H. Engineering Design: A Systematic Approach, 3rd ed.; Springer Verlag: Berlin, Germany, 2007. [Google Scholar]
- Otto, K.N.; Wood, K.L. Product Design: Techniques in Reverse Engineering and New Product Development; Prentice-Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Doebelin, E.O. Measurement Systems: Application and Design; McGraw-Hill: Boston, MA, USA, 2004. [Google Scholar]
- Toko, K. Measurement of Taste and Smell Using Biomimetic Sensor. In Proceedings of the 17th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Maastricht, The Netherlands, 25–29 January 2004; pp. 201–207.
- Ghasemi-Varnamkhasti, M.; Mohtasebi, S.S.; Siadat, M. Biomimetic-based odor and taste sensing systems to food quality and safety characterization: An overview on basic principles and recent achievements. J. Food Eng. 2010, 100, 377–387. [Google Scholar] [CrossRef]
- Tan, Y.; Nie, L.; Yao, S. A piezoelectric biomimetic sensor for aminopyrine with a molecularly imprinted polymer coating. Analyst 2001, 126, 664–668. [Google Scholar] [CrossRef]
- Nagle, H.T.; Gutierrez-Osuna, R.; Schiffman, S.S. The how and why of electronic noses. IEEE Spectr. 1998, 35, 22–31. [Google Scholar]
- Che Harun, F.K.; Taylor, J.E.; Covington, J.A.; Gardner, J.W. An electronic nose employing dual-channel odour separation columns with large chemosensor arrays for advanced odour discrimination. Sens. Actuat. B Chem. 2009, 141, 134–140. [Google Scholar] [CrossRef]
- Bar-Cohen, Y. Biomimetics—Using nature to inspire human innovation. J. Bioinspir. Biomim. 2006, 1, P1–P12. [Google Scholar] [CrossRef]
- Brudzewski, K.; Osowski, S.; Ulaczyk, J. Differential electronic nose of two chemo sensor arrays for odor discrimination. Sens. Actuat. B Chem. 2010, 145, 246–249. [Google Scholar] [CrossRef]
- Chen, P.C.; Ishikawa, F.N.; Chang, H.K.; Ryu, K.; Zhou, C. A nanoelectronic nose: A hybrid nanowire/carbon nanotube sensor array with integrated micromachined hotplates for sensitive gas discrimination. Nanotechnology 2009, 20, 1–8. [Google Scholar]
- Lee, S.H.; Park, T.H. Recent advances in the development of bioelectronic nose. Biotechnol. Bioprocess. Eng. 2010, 15, 22–29. [Google Scholar] [CrossRef]
- Williamson, M.M. Biologically Inspired Approaches to Computer Security; Information Infrastructure Laboratory, HP Laboratories: Bristol, UK, 2002. [Google Scholar]
- Smith, C.U.M. Biology of Sensory Systems; John Wiley: Chichester, NY, USA, 2000. [Google Scholar]
- Møller, A.R. Sensory Systems: Anatomy and Physiology; Academic Press: Boston, MA, USA, 2003. [Google Scholar]
- Spudich, J.L.; Satir, B.H. Sensory Receptors and Signal Transduction; Wiley-Liss: New York, NY, USA, 1991; Volume 10. [Google Scholar]
- Chamovitz, D. What a Plant Knows: A Field Guide to the Senses; Scientific American/Farrar, Straus and Giroux: New York, NY, USA, 2012. [Google Scholar]
- Nagel, J.K.S.; Stone, R.B.; McAdams, D.A. Exploring the Use of Category and Scale to Scope a Biological Functional Model. In Proceedings of the ASME International Design Engineering Technical Conference & Computers and Information in Engineering Conference, IDETC/CIE 2010, Montreal, Quebec, Canada, 15–18 August 2010.
- Nagel, J.K.S.; Stone, R.B. A Systematic Approach to Biologically-Inspired Engineering Design. In Proceedings of the ASME International Design Engineering Technical Conference & Computers and Information in Engineering Conference, IDETC/CIE 2011, Washington, DC, USA, 29–31 August 2011.
- Goel, A.; McAdams, D.A.; Stone, R.B. Biologically Inspired Design: Computational Methods and Tools; Springer: London, UK, 2013. [Google Scholar]
- Gebeshuber, I.C.; Drack, M. An attempt to reveal synergies between biology and mechanical engineering. Proc. Inst. Mech. Eng. C 2008, 222, 1281–1287. [Google Scholar] [CrossRef]
- Hirtz, J.; Stone, R.; McAdams, D.; Szykman, S.; Wood, K. A functional basis for engineering design: Reconciling and evolving previous efforts. Res. Eng. Design 2002, 13, 65–82. [Google Scholar]
- Nagel, J.K.S.; Nagel, R.L.; Stone, R.B.; McAdams, D.A. Function-based, biologically inspired concept generation. Aitif. Intell. Eng. Des. Anal. Manuf. 2010, 24, 521–535. [Google Scholar] [CrossRef]
- Campbell, N.A.; Reece, J.B. Biology; Pearson Benjamin Cummings: San Francisco, FL, USA, 2003. [Google Scholar]
- Raven, P.H.; Johnson, G.B. Biology; McGraw-Hill: Boston, MA, USA, 2002. [Google Scholar]
- Martin, E.; Hine, R.S. Oxford Dictionary of Biology; Oxford University Press: Oxford, UK, 2000. [Google Scholar]
- Henderson, I.F.; Lawrence, E. Henderson’s Dictionary of Biology; Pearson Education: Harlow, Essex, England, 2005. [Google Scholar]
- Farabee, M.J. Plants and Their Structure. Available online: http://www.biologie.uni-hamburg.de/b-online/library/onlinebio/BioBookPLANTANAT.html (accessed on 1 May 2010).
- Shahinpoor, M.; Schneider, H.-J. Intelligent Materials; RSC Publication: Cambridge, UK, 2008. [Google Scholar]
- Schneider, H.-J.R.; Kato, K.; Strongin, R.M. Chemomechanical polymers as sensors and actuators for biological and medicinal applications. Sensors 2007, 7, 1578–1611. [Google Scholar] [CrossRef]
- Wang, Z.L. Self-assembled nanoarchitectures of polar nanobelts/nanowires. J. Mater. Chem. 2005, 15, 1021–1024. [Google Scholar] [CrossRef]
- Hart, A.; Sengupta, P. Sensory Transduction Mechanisms. In Encyclopedia of Life Sciences; John Wiley & Sons: London, UK, 2005; Volume 17, pp. 107–114. [Google Scholar]
- Mitchell, B.K. Chemoreception. In Encyclopedia of Insects; Academic Press: Amsterdam, The Netherlands, 2003; pp. 169–174. [Google Scholar]
- Lu, W.; Lieber, C.M. Semiconductor nanowires. J. Phys. D Appl. Phys. 2006, 39, R387–R406. [Google Scholar] [CrossRef]
- Kalantar-zadeh, K.; Fry, B.N. Nanotechnology-Enabled Sensors; Springer: New York, NY, USA, 2008. [Google Scholar]
- Harnett, C. Nanotechnology in environmental sensors. IEEE Instrum. Measur. Mag. 2010, 13, 8–12. [Google Scholar] [CrossRef]
- Wang, Z.L. Piezoelectric nanostructures: From growth phenomena to electric nanogenerators. MRS Bull. 2007, 32, 109–116. [Google Scholar] [CrossRef]
- Tian, B.; Xie, P.; Kempa, T.J.; Bell, D.C.; Lieber, C.M. Single crystalline kinked semiconductor nanowire superstructures. Nat. Nanotechnol. 2009, 4, 824–829. [Google Scholar] [CrossRef]
- Gao, P.; Wang, Z.L. Self-assembled nanowire-nanoribbon junction arrays of ZnO. J. Phys. Chem. B 2002, 106, 12653–12658. [Google Scholar] [CrossRef]
- Bhushan, B. Springer Handbook of Nanotechnology; Springer: New York, NY, USA, 2004. [Google Scholar]
- Lavrik, N.V.; Sepaniak, M.J.; Datskos, P.G. Cantilever transducers as a platform for chemcial and biological sensors. Rev. Sci. Instrum. 2004, 75, 2229–2253. [Google Scholar] [CrossRef]
- Law, M.; Goldberger, J.; Yang, P. Semiconductor nanowires and nanotubes. Annu. Rev. Mater. Res. 2004, 34, 83–122. [Google Scholar] [CrossRef]
- Menon, M.; Srivastava, D. Nanomechanics of silicon nanowires. Phys. Rev. B 2004, 70, 125313. [Google Scholar] [CrossRef]
- Postma, H.W.C.; Kozinsky, I.; Husain, A.; Roukes, M.L. Dynamic range of nanotube- and nanowire-based electromechanical systems. Appl. Phys. Lett. 2005, 86, 223105. [Google Scholar] [CrossRef]
- Tonisch, K.; Cimalla, V.; Will, F.; Weise, F.; Stubenrauch, M.; Albrecht, A.; Hoffmann, M.; Ambacher, O. Nanowire-based electromechanical biomimetic sensor. Phys. E 2007, 37, 208–211. [Google Scholar] [CrossRef]
- Lübbers, B.; Kittler, G.; Ort, P.; Linkohr, S.; Wegener, D.; Baur, B.; Gebinoga, M.; Weise, F.; Eickhoff, M.; Maroldt, S.; et al. A novel gan-based multiparameter sensor system for biochemical analysis. Phys. Status Solidi C 2008, 5, 2361–2362. [Google Scholar] [CrossRef]
- Niebelschütz, F.; Cimalla, V.; Tonisch, K.; Haupt, C.; Brückner, K.; Stephan, R.; Hein, M.; Ambacher, O. Algan/gan-based mems with two-dimensional electron gas for novel sensor applications. Phys. Status Solidi C 2008, 5, 1914–1916. [Google Scholar] [CrossRef]
- Brueckner, K.; Niebelschuetz, F.; Tonisch, K.; Stephan, R.; Cimalla, V.; Ambacher, O.; Hein, M.A. Resonant Piezoelectric Algan/Gan Mems Sensors in Longitudinal Mode Operation. In Proceedings of the Micro Electro Mechanical Systems (MEMS 2009), Sorrento, Italy, 25–29 January 2009; pp. 927–930.
- Lauhon, L.J.; Gudiksen, M.S.; Wang, D.; Lieber, C.M. Epitaxial core-shell and core-multi-shell nanowire heterostructures. Nature 2002, 420, 57–61. [Google Scholar] [CrossRef]
- Lu, W.; Xie, P.; Lieber, C.M. Nanowire transistor performance limits and applications. IEEE Trans. Electron. Devices 2008, 55, 2859–2876. [Google Scholar] [CrossRef]
- Tian, B.; Kempa, T.J.; Lieber, C.M. Single nanowire photovoltaics. Chem. Soc. Rev. 2009, 38, 16–24. [Google Scholar] [CrossRef]
- Kong, X.Y.; Wang, Z.L. Spontaneous polarization-induced nanohelixes, nanosprings, and nanorings of piezoelectric nanobelts. Nano Lett. 2003, 3, 1625–1631. [Google Scholar] [CrossRef]
- Richters, J.-P.; Voss, T.; Wischmeier, L.; Ruckmann, I.; Gutowski, J. Influence of polymer coating on the low-temperature photoluminescence properties of ZnO nanowires. Appl. Phys. Lett. 2008, 92, 011103. [Google Scholar] [CrossRef]
- Tenhaeff, W.E.; Gleason, K.K. Initiated and oxidative chemical vapor deposition of polymeric thin films: iCVD and oCVD. Adv. Funct. Mater. 2008, 18, 979–992. [Google Scholar] [CrossRef]
- Gao, P.-X.; Liu, J.; Buchine, B.A.; Weintraub, B.; Wang, Z.L.; Lee, J.L. Bridged ZnO nanowires across trenched electrodes. Appl. Phys. Lett. 2007, 91, 142108. [Google Scholar] [CrossRef]
- Fan, Z.; Wang, D.; Chang, P.-C.; Tseng, W.-Y.; Lu, J.G. ZnO nanowire field-effect transistor and oxygen sensing property. Appl. Phys. Lett. 2004, 85, 5923–5925. [Google Scholar] [CrossRef]
- Fan, Z.; Lu, J.G. Chemical sensing with ZnO nanowire field-effect transistor. IEEE Trans. Nanotechnol. 2006, 5, 393–396. [Google Scholar] [CrossRef]
- Mulchandani, A.; Sadik, O.A. Chemical and Biological Sensors for Environmental Monitoring; American Chemical Society: Washington, DC, USA, 2000. [Google Scholar]
- Fryxell, G.E.; Cao, G. Environmental Applications of Nanomaterials: Synthesis, Sorbents and Sensors; Imperial College Press: London, UK, 2007. [Google Scholar]
- Amann, A.; Smith, D. Breath Analysis for Clinical Diagnosis and Therapeutic Monitoring; World Scientific: Hackensack, NJ, USA, 2005. [Google Scholar]
- Cao, W.; Duan, Y. Breath analysis: Potential for clinical diagnosis and exposure assessment. Clin. Chem. 2006, 52, 800–811. [Google Scholar] [CrossRef]
- Spichiger-Keller, U.E. Chemical Sensors and Biosensors for Medical and Biological Applications; Wiley-VCH: Weinheim, Germany, 1998. [Google Scholar]
- Zhang, X.; Ju, H.; Wang, J. Electrochemical Sensors, Biosensors and Their Biomedical Applications; Elsevier/Academic Press: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Wynn, D.; Clarkson, J. Models of Designing. In Design Process Improvement; Clarkson, J., Eckert, C., Eds.; Springer: London, UK, 2005; pp. 34–59. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
MDPI and ACS Style
Nagel, J.K.S. Guard Cell and Tropomyosin Inspired Chemical Sensor. Micromachines 2013, 4, 378-401. https://doi.org/10.3390/mi4040378
AMA Style
Nagel JKS. Guard Cell and Tropomyosin Inspired Chemical Sensor. Micromachines. 2013; 4(4):378-401. https://doi.org/10.3390/mi4040378
Chicago/Turabian StyleNagel, Jacquelyn K.S. 2013. "Guard Cell and Tropomyosin Inspired Chemical Sensor" Micromachines 4, no. 4: 378-401. https://doi.org/10.3390/mi4040378