
Design, Modelling, and Control of Continuum Arms with Pneumatic Artificial Muscles: A Review

1
Faculty of Manufacturing Technologies with the Seat in Prešov, Technical University of Košice, Bayerova 1, 080 01 Prešov, Slovakia
2
Department of Manufacturing Engineering, Machines and Tools of the Sumy State University, Rymskogo-Korsakova 2, 40007 Sumy, Ukraine
*
Author to whom correspondence should be addressed.
Machines 2023, 11(10), 936; https://doi.org/10.3390/machines11100936
Submission received: 20 July 2023
/
Revised: 18 September 2023
/
Accepted: 28 September 2023
/
Published: 30 September 2023
(This article belongs to the Special Issue Innovations in the Design, Simulation, and Manufacturing of Production Systems)
Abstract
:In this research paper, we present a comprehensive analysis of the current state of soft robots actuated with pneumatic artificial muscles and emphasise their distinct advantages over rigid robots, including exceptional flexibility, adaptability, and safety. Our study explores the design principles of soft robots, drawing inspiration from biological systems and human hands, and identifies promising avenues for further development. The emergence of hybrid robots is also recognised as a significant advancement, particularly in scenarios requiring high precision. The article explores mathematical models encompassing kinematics, dynamics, and statics, as well as alternative model-free approaches. These theoretical frameworks are instrumental in understanding and manipulating the behaviour of soft robots. However, despite substantial progress, soft robots’ practical application and simulation face limitations, primarily due to the demanding requirements and implementation challenges associated with their deployment. Consequently, this paper highlights the need for continued research and advancements to bridge the gap between the theoretical potential and practical utilisation of soft robots.
1. Introduction
Soft robotics has emerged as a promising field of research, offering a new paradigm for designing and developing robotic systems with unparalleled flexibility, adaptability, and safety [1,2,3,4]. By employing soft, flexible, and stretchable materials, soft robots possess unique characteristics that differentiate them from their rigid counterparts.
One of the fundamental aspects of soft robotics lies in its choice of materials [5]. Soft robots are constructed using materials that are inherently pliable, flexible, and stretchable. These materials exhibit reversible and variable properties, allowing robots to undergo substantial deformations while retaining their structural integrity. This exceptional flexibility enables soft robots to adapt to various tasks and interact safely with their surroundings, particularly in dynamic and uncertain environments.
Moreover, the compliance inherent in soft robotic systems contributes to their ability to match the properties of their environment. [6] The continuum topology of soft robots offers infinite degrees of freedom [7,8,9,10], facilitating smooth and natural movements and enabling them to seamlessly house all essential components. This characteristic further enhances the interaction capabilities of soft robots with objects and living beings, leading to improved human–machine collaboration and cooperation.
Safety is a paramount concern when it comes to human–robot interaction. With their inherent compliance and adaptability, soft robotics ensures a high level of safety for both the robot and its human counterparts [11]. The pliable nature of these robots reduces the risk of injury in the event of accidental collisions or physical contact. Furthermore, soft robots possess adaptive capabilities that allow them to navigate and operate in unknown and unstructured environments, making them suitable for various applications, including healthcare, rehabilitation, and assistance.
Soft robots are not limited to their physical structure but also incorporate flexible and stretchable electronics and power sources. These advancements enable seamless electronic components and power supply integration, allowing soft robots to be self-contained and self-sufficient. This integration opens opportunities for novel functionalities and behaviours in soft robotic systems, enhancing their versatility and expanding their potential applications [12].
In addition to their physical and electronic characteristics, soft robots offer high behavioural diversity. Their pliable nature allows for a wide range of motion and locomotion patterns, suitable for applications that require dexterous and delicate interactions [13]. Furthermore, soft robotics draws inspiration from biological systems, enabling the development of robots that mimic or emulate the capabilities of living organisms. This bio-inspired aspect enhances soft robotic systems’ adaptability, efficiency, and versatility.
Soft robotics also tolerates lower accuracy, speed, and force applications [14]. While traditional rigid robots excel at high-precision tasks, soft robots thrive in applications with more relaxed accuracy requirements. Their inherent compliance allows them to tolerate imprecise movements and interactions, opening avenues for domains where precision is not the primary focus. Moreover, soft robots tend to have lower weight and cost than their rigid counterparts, expanding their accessibility to various applications and reducing the economic barriers associated with robotic technology.
Soft robots can be classified into various categories based on their actuation methods, including pneumatic, hydraulic, magnetic, piezoelectric, electric, and hydroscopic approaches. Among these, pneumatic actuation has gained considerable popularity due to its affordability and high load capacity. However, in practical applications, pneumatic actuators face certain limitations, including slow activation speeds and limited controllability [15]. To overcome these challenges, researchers have pursued innovative design approaches to enhance pneumatic actuators’ performance in the realm of soft robotics. These efforts aim to optimise the functionality and effectiveness of pneumatic actuation, thereby expanding the possibilities for soft robotic applications.
This review aims to comprehensively explore various aspects of soft pneumatic continuum arms and robots, including design principles, mathematical modelling, control strategies, and simulation applications.
This paper is divided into six sections: Section 1 introduces the main features of soft robots, their advantages over rigid robots, and the fields of their potential applications. Section 2 describes the design-specific features of soft continuum robots with PAMs. Section 3 describes the mathematical modelling of soft continuum robots with PAMs, specifically demonstrating methods for modelling their kinematics and dynamics. Section 4 outlines the different types of soft robot control systems, describing their key features. Section 5 describes the applications that exist for simulating soft continuum robots with PAMs. Section 6 summarises and outlines future work directions.
2. Design of Soft Continuum Robots with PAMs
2.1. McKibben Soft Manipulator
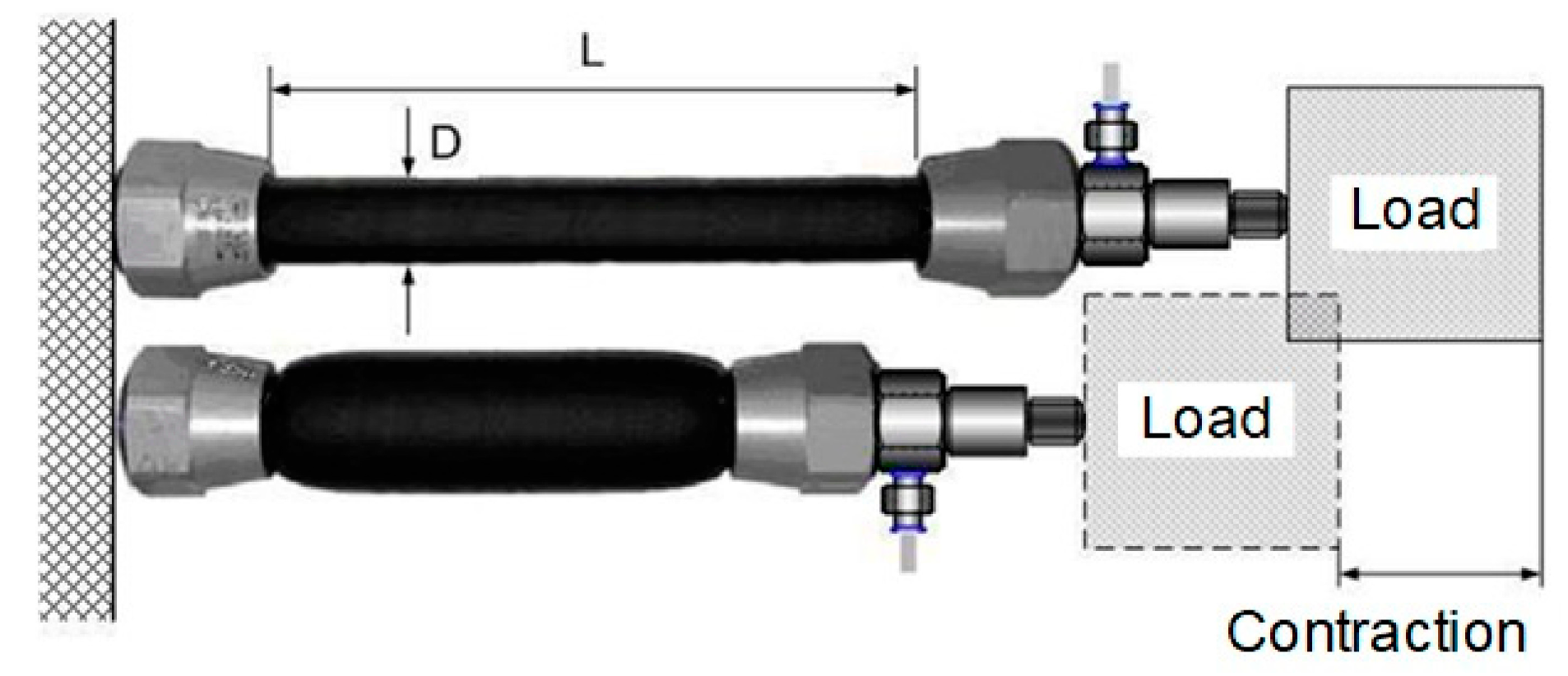
The pneumatic continuum arm represents an innovative design concept in robotics, offering a versatile and adaptable solution for various applications. One of the main components of such an arm is the pneumatic artificial muscle (PAM). The pneumatic artificial muscle comprises two essential components: a silicon rubber tube serving as a bladder and a braided fibre mesh sleeve enveloping the bladder. The bladder is hermetically sealed at both ends, facilitating the controlled intake or release of compressed air through a gas inlet/outlet at one extremity. Inflation of the bladder increases volume, causing axial contraction of the surrounding sleeve due to its limited lateral expansion capacity [16]. Notably, the maximal attainable degree of contraction exhibited by these muscle actuators is conventionally constrained to approximately 25% of their nominal length. [17]. Figure 1 visually explains the operational mechanism underlying pneumatic artificial muscles.
The McKibben muscle represents the predominant variant of this muscular construct. It encompasses a malleable cylindrical chamber, primarily comprising elastomeric material, which serves as its structural foundation. Additionally, it incorporates two extremities designed to facilitate attachment and actuation. Moreover, an external mesh comprised of non-extensible fibres is intricately wound in a helical arrangement around the inflatable chamber, firmly affixed to the extremities [18]. However, its main disadvantage is its low contraction rate [19]. Figure 2 presents the design of the McKibben actuator.
Several studies [20,21,22,23] utilise McKibben’s muscles in soft robots. Pritts et al. [20] presented a continuum manipulator design, employing six to eight McKibben drives opposite each other to achieve biaxial bending. The design comprises flexible sections connected by rigid baseplates, enabling high rotation (30–35 degrees per section and 50 degrees for the entire arm) and a lifting capacity of 25 pounds in vertical motion. Al-Fahaam et al. [21] designed a soft exoskeleton glove incorporating a novel drive called an extensor, which flexes a pneumatic artificial muscle. The drive utilises reinforced artificial McKibben muscles to create bending motion under pressure. For locomotion, Faudzi et al. [22] discussed a soft amphibious robot utilising thin and soft McKibben actuators. This robot features a unique leg and body flexion mechanism, enabling movement on flat and sloping surfaces, sand, and water, with various gaits such as trotting and crawling. Including a plastic plate between the actuators allows for lateral movement, mimicking the locomotion patterns of biological creatures such as lizards and salamanders. Lastly, another study by Faudzi et al. [23] proposed a soft manipulator utilising McKibben muscles as actuators. Inspired by the body structure of a snake, the robot incorporates thin, flexible plastic plates extending up to 32 cm.
2.2. Bioinspired Arms
The surge in pneumatic continuum arms development can be attributed to their potential to supplant human involvement in specific mechanical operations within the industrial sector. It is worth highlighting that while soft robots cannot entirely replace their rigid counterparts, they hold promise for executing specific tasks associated with manipulating and transporting delicate, fragile, and easily vulnerable objects. Primarily, these robots emulate the mechanical movements exhibited by the human hand. Nevertheless, researchers have also expressed interest in exploring the movements performed by various animals, including snakes, octopuses, frogs, and even origami structures. Additional research has focused on novel actuator designs [27,28] dedicated to the multi-degree-of-freedom soft pneumatic actuator (MDoF SPA), which can extend or rotate in direct response to pressurised air being inputted into distinct chambers.
Several studies have focused on developing soft robotic manipulators inspired by the human hand. Al-Ibadi et al. [29] investigated the rotating behaviour of the human arm and designed a soft robot arm inspired by human arm performance. The proposed continuum arm featured contraction actuators and a self-bending contraction actuator (SBCA) to enable rotation and bending in different directions. Petre et al. [30] conducted experiments on a FESTO-origin pneumatic muscle by analysing its contraction under varying pressures and loads. The results showed that the muscle exceeded the specified maximum contraction, achieving up to 27% contraction. Yukisawa et al. presented a pneumatic continuum arm with three segments and three actuators per segment [31]. This arm offered elongation of up to 180% and a maximum tension force of 150 N, enabling object grasping and desktop interaction. Al-Ibadi et al. [32] proposed a soft robot arm utilising a self-bending contractor soft actuator to address rigidity issues. This arm exhibited a high bending angle (up to 213 degrees) and a payload capacity of 2 kg. Al-Ibadi et al. also studied a novel continuum robot arm based on pneumatic artificial muscle [33]. Self-bending contraction actuators (SBCAs) were incorporated into this design to fulfil design requirements such as low weight and multi-degree-of-freedom.
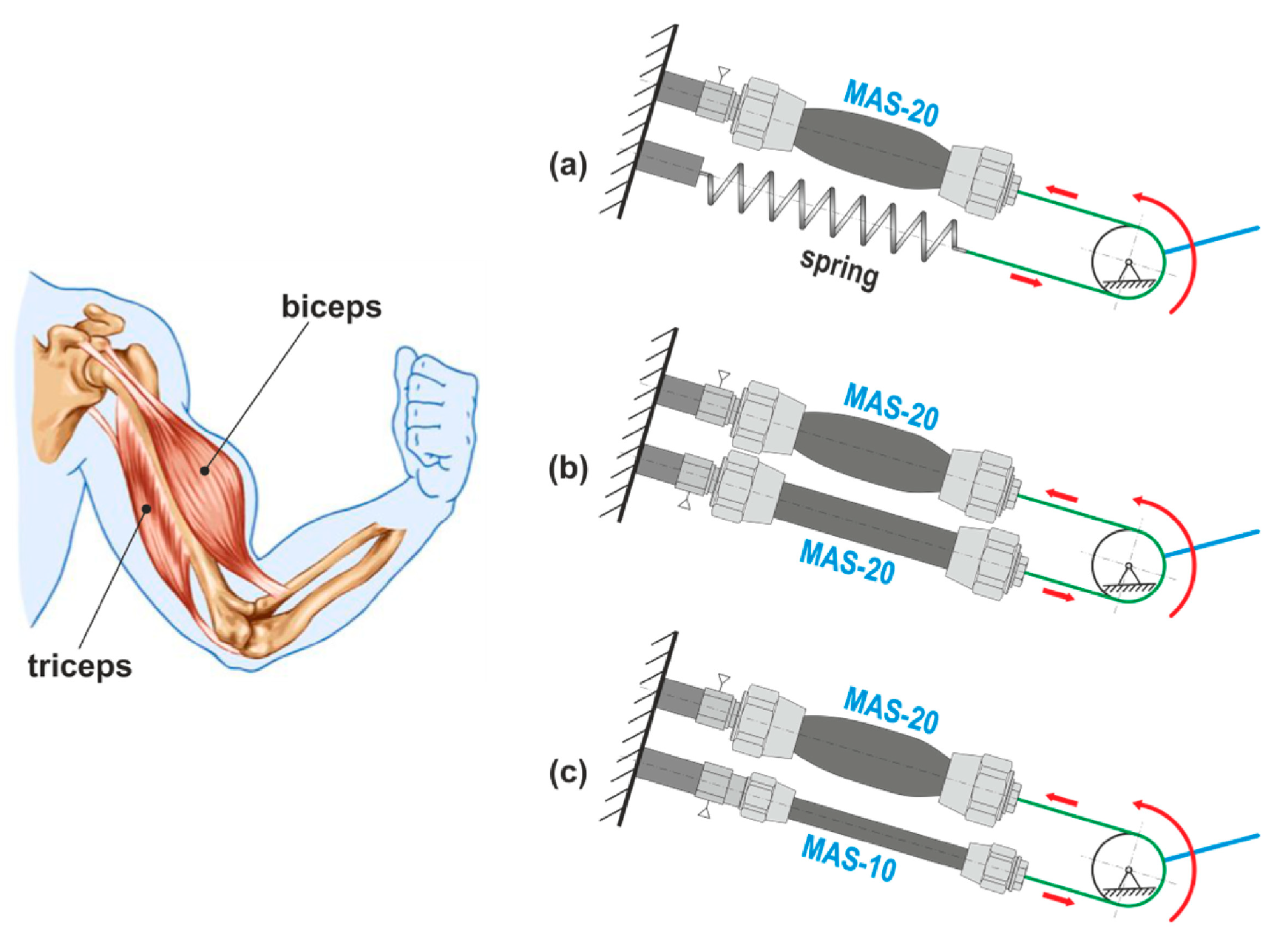
Furthermore, Tuleja et al. [34] investigated opposing pneumatic muscles (PAM) to mimic human hand mechanics. Al-Ibadi et al. [35] presented the design and implementation of an extensor PAM that could bend and extend, offering versatility for various applications. The study developed mathematical models for the actuator’s behaviour and validated them with experimental data. Park et al. [36] introduced a pneumatic artificial muscle actuator with embedded contraction sensing, enabling controllability and reliable sensor signals. Experimental results demonstrated that PAMs exhibit enhanced power capabilities compared to conventional drives, enabling them to lift a 3 kg load. In this study, we explored three hand configurations: (a) a PAM with a spring; (b) two PAMs with the same parameters; and (c) two PAMs with different parameters, as shown in Figure 3.
Another popular design involves pneumatic muscles, inspired by the octopus. Hassan et al. [37] introduced ActiveBraid, a continuum manipulator inspired by muscle hydrostats. It uses six longitudinal tendons to achieve bending in three main directions, enabling single and multiple bends throughout the 3D space. The manipulator achieves a maximum flexion angle of 35° and a total shortening of approximately 44% when three tendons are retracted simultaneously.
Grissom et al. [13] presented the OctArm series, which has soft robotic arms driven by air muscle extensors with three control channels per section. OctArm IV exhibits rapid and precise movements with impressive extension and rotation capabilities, while OctArm V demonstrates high load capacities.
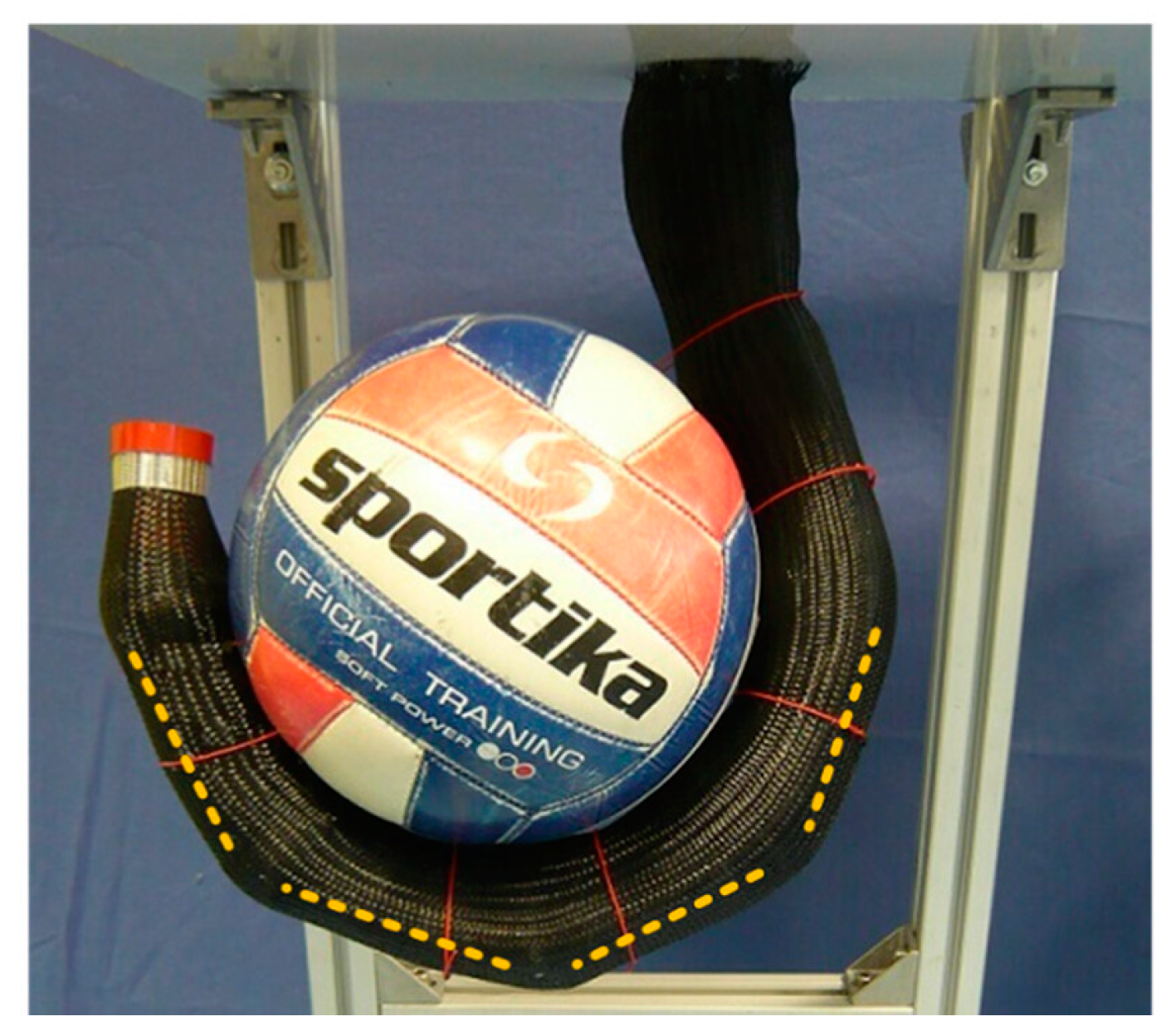
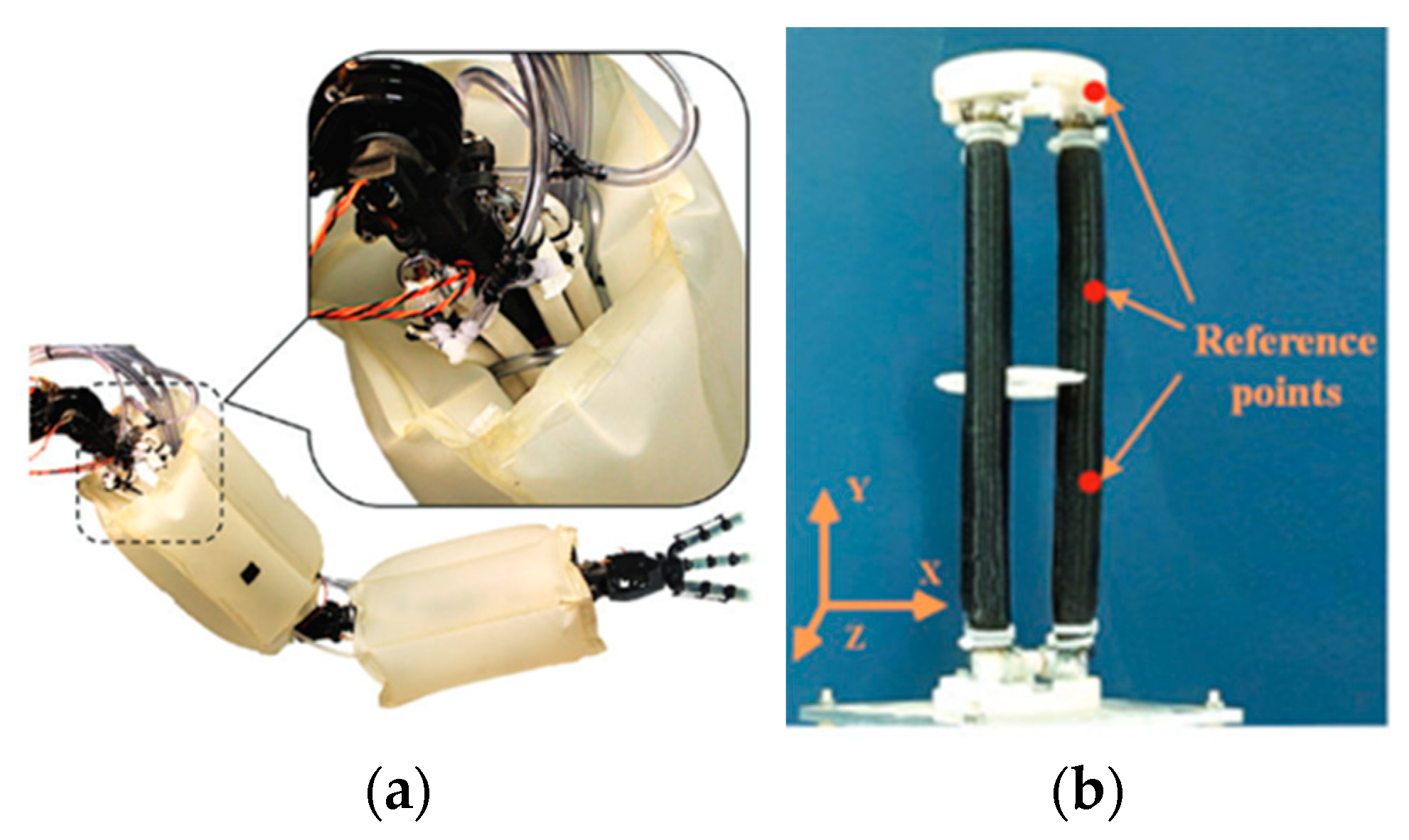
Furthermore, Kang et al. [38] studied a robotic continuum arm driven by pneumatic muscle actuators, replicating the muscular structures of live octopus arms. Their experimental results demonstrate the arm’s ability to perform stereotyped movements such as lengthening, bending, reaching, and grasping. These studies collectively contribute to advancing pneumatic muscle-driven robotic continuum manipulators inspired by octopus biology. Another study by Kang et al. [39] focused on the development of a 670 mm long soft robotic arm comprising six stacked modules, initially sized at 100 mm and actuated by identical parallel pneumatic muscle actuators. Its most distinctive feature is its grasping movement, which can extend and contract the PAM on the opposite side of the target object. This manoeuvre is a departure from the natural behaviour of octopus arms while still upholding comparable functionality. Figure 4 presents the octopus-inspired arm.
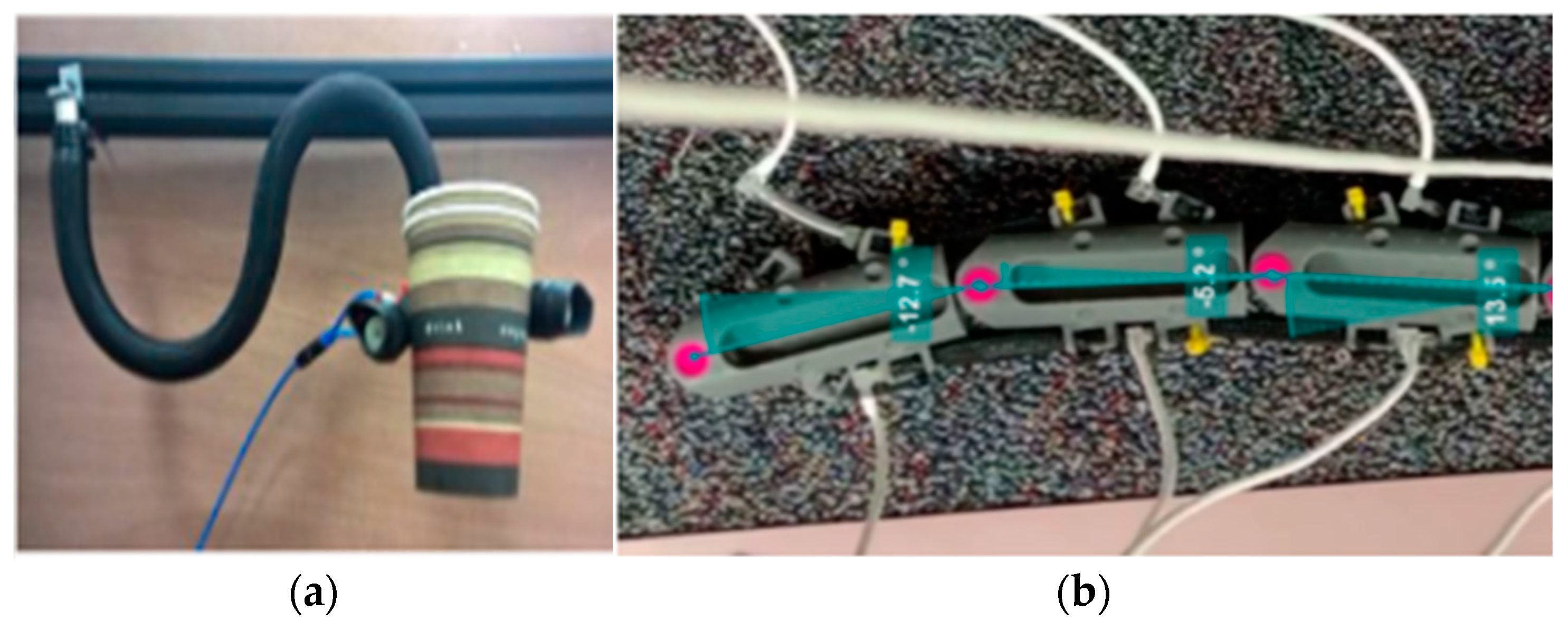
Innovative designs inspired by snakes have been explored in a series of studies on soft robotic systems (Figure 5). Al-Ibadi et al. [40] introduced a novel double-bend pneumatic muscle actuator inspired by snake lateral undulation. This actuator can bend in opposite directions from its two halves, enabling distinctive horizontal and vertical movements. Leveraging this concept, they designed a continuum robot arm capable of parallel ground-level object manipulation by integrating the double-bend actuator with a soft gripper. They also propose using self-bending contraction actuators to enhance system efficiency, resulting in improved performance and form for the continuum arm. Faudzi et al. [23] developed a soft manipulator inspired by the body structure of a snake. This robot had McKibben muscles as actuators and thin, bendable plastic plates and thin silicone tube muscles positioned on the sides of its body. The robot underwent testing with various input configurations, successfully demonstrating smooth snake-like motions with different time delays. Notably, the robot demonstrated its practical capabilities by performing a pick-and-place experiment. Lopez et al.’s research [41] explores energy-efficient kinematic design in PAM-driven snake-inspired robot locomotion. Although the observed inefficiency in achieving desired forward velocities raises concerns for real-world applications, the muscle-driven approach offers the advantage of bio-inspired adaptability for navigating complex terrains. Analysing joint-level movement underscores the significance of addressing actuation delays in realising precise and efficient snake-like locomotion, highlighting a crucial aspect of refining the overall design. Figure 5 depicts snake-inspired PAM-driven robots.
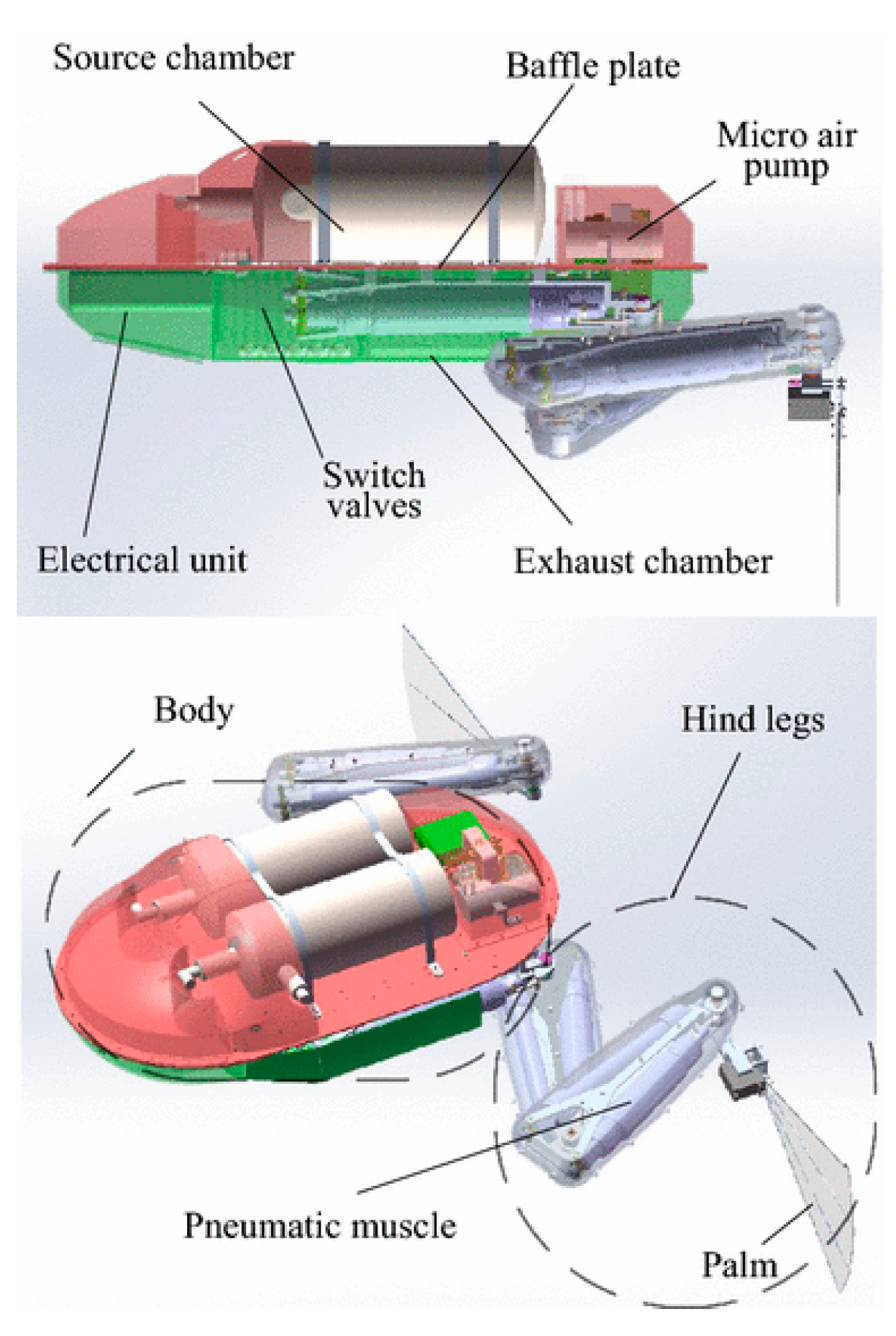
Fan et al. [42] developed a frog-inspired robot using pneumatic muscles as joint actuators to mimic a frog swimming with three degrees of freedom in its leg. The robot’s pneumatic system included internal chambers, a micro-air pump, and high-speed switching valves to perform tasks independently. Simulation-based analysis of pneumatic system dynamics highlights the importance of flow velocity in optimising muscle pressure response, highlighting the feasibility and potential of muscle-driven pneumatic robots. Figure 6 illustrates the structure of a frog-inspired robot.
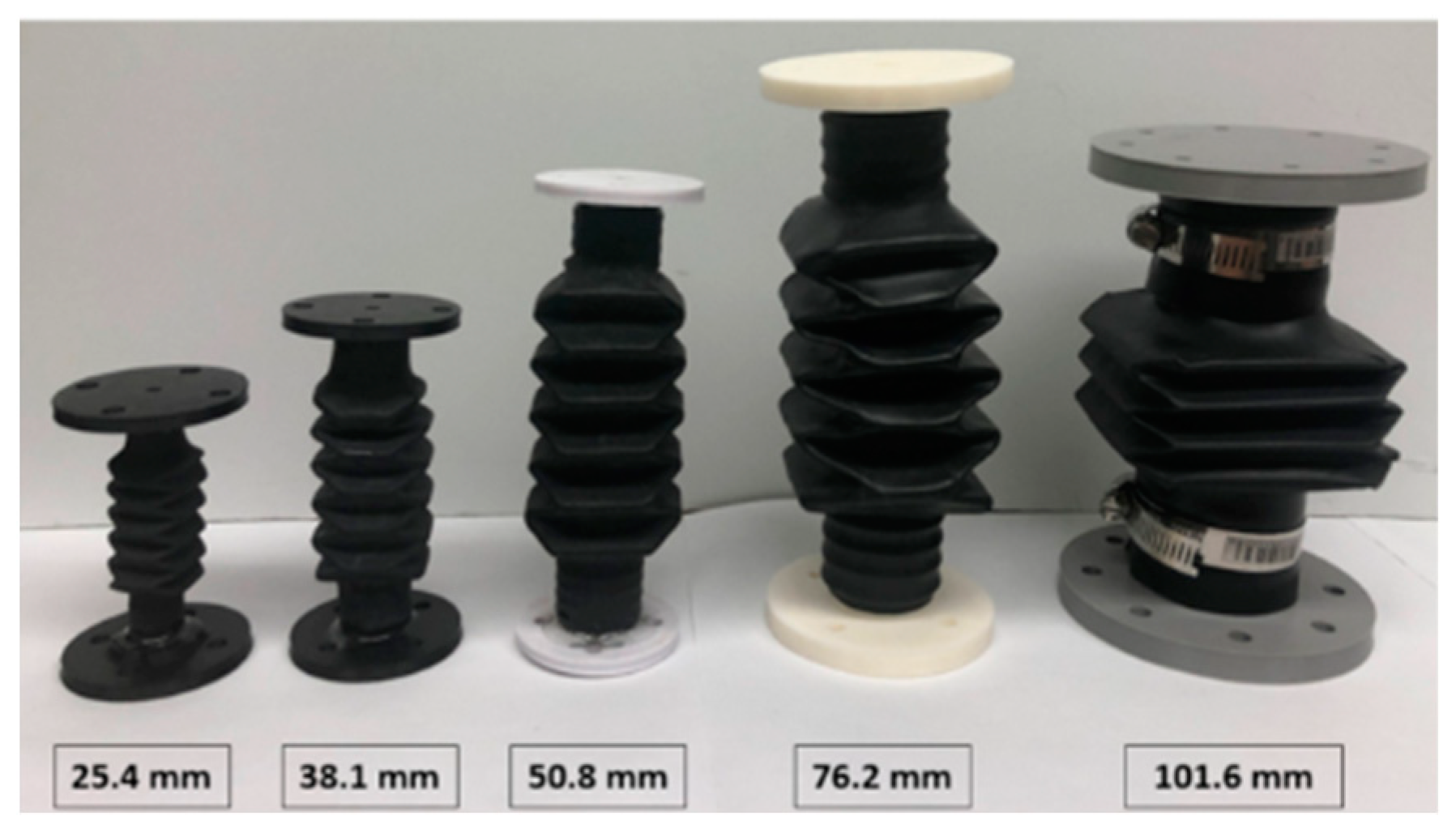
Zaghloul et al. [12] presented advancements in the fabrication and performance of origami-inspired soft pneumatic actuators (OSPAs) (Figure 7). Their rapid fabrication method enabled the creation of OSPAs of different sizes and materials, achieving a high force-to-weight ratio. Fatigue tests demonstrated the superior performance of the accordion pattern OSPA compared to other designs.
Additionally, a computationally efficient design approach enhances the work output of OSPAs. These findings contribute to developing more efficient and versatile soft pneumatic actuators.
2.3. Hybrid Robotics
The main disadvantage of soft robots is their low positioning accuracy, which restricts their practical use. To address the inherent conflict between safety considerations and positioning accuracy, a practical approach involves incorporating rigid components into the structure of soft robots. This integration overcomes certain limitations and expands the potential applications of soft robots. Consequently, extensive research has been dedicated to developing hybrid robot technologies that combine the desirable qualities of soft and hard robotics.
Continuum robots with hybrid drives have shown the potential to overcome limitations. Harsono et al. [43] implemented a two-plane main structure that enhances rigidity. The stiffness control mechanism contributes to improved position accuracy.
Yang et al. [44] highlighted the design of soft-rigid manipulators with modular characteristics. These manipulators exhibited enhanced load capacity and reduced weight compared to other soft robotic manipulators. The integration of soft and rigid elements enables greater versatility in movement.
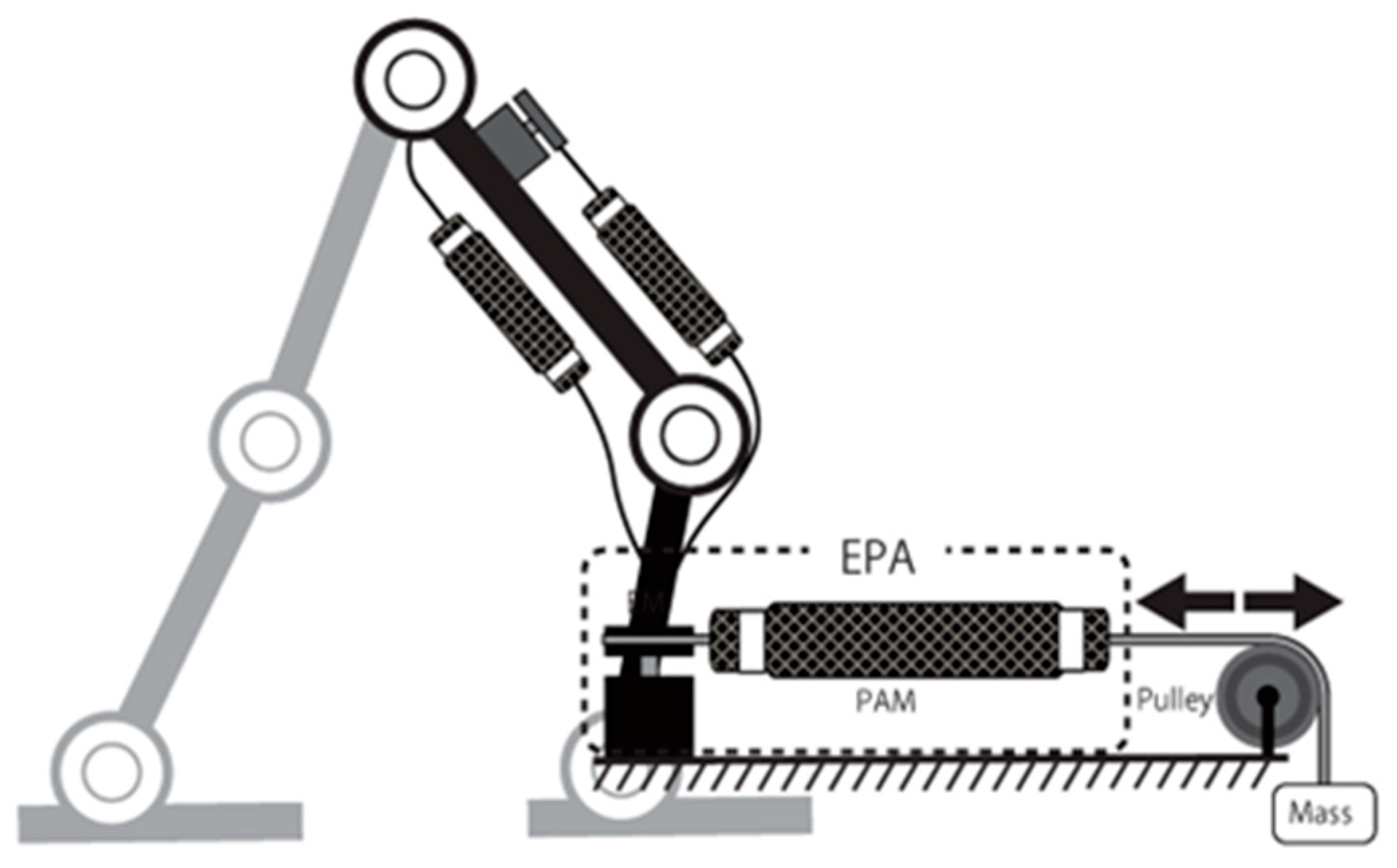
Sharbafi et al. [45] introduced the novel concept of a hybrid electric–pneumatic actuator (EPA) as an enhanced variable impedance actuator (VIA) by combining pneumatic artificial muscles (PAMs) and electric motors (EMs). Unlike other VIAs, the EPA incorporates PAMs that provide adaptable compliance and contribute to powerful actuators with muscle-like properties, operating in tandem with EMs. This integration leverages the precise control of EMs and the compliant energy storage of PAMs, which is beneficial for efficient and adjustable locomotion. Experimental and simulation findings, validated by a new dynamic model of PAMs, demonstrate that this hybrid approach improves energy efficiency and performance without significantly increasing control complexity or weight. Figure 8 shows the design of a hybrid electric–pneumatic actuator.
Ohta et al. [46] proposed a novel bioinspired robotic arm that combines the positive qualities of rigid and soft robotics. The arm has seven degrees of freedom and is pneumatically powered using custom-built McKibben-type pneumatic artificial muscles. The hand and wrist motions are actuated through servomotors, while the arm is equipped with potentiometers in each joint for detecting joint angle changes.
Sun et al. [47] introduced a novel hybrid continuum robot design, as shown in Figure 9. Incorporating pneumatic muscles and elastic rods allows the robot to switch between motion modes for large-scale movement and precise positioning. A locking mechanism enables rigidity adjustments to suit different tasks.
Nazari et al. [48] described a continuum arm design that combines soft and rigid elements. A redundant rigid chain provides additional structural strength, while pneumatic artificial muscles power the arm.
3. Mathematical Modelling of Soft Continuum Robots with PAMs
3.1. Kinematics Modelling
Kinematics models play a crucial role in understanding and controlling the movements of soft robots. It can be divided into two main categories: forward kinematics and inverse.
Forward kinematics in soft robots can predict the resulting pose or configuration of the robot according to actuation inputs. They determine how the robot’s soft body deforms by changing shape in response to applied forces or control inputs. The forward kinematics analysis provides insights into the robot’s motion, such as its position and orientation, which is crucial for planning tasks such as reaching specific points, avoiding obstacles, and ensuring safe interactions with the environment.
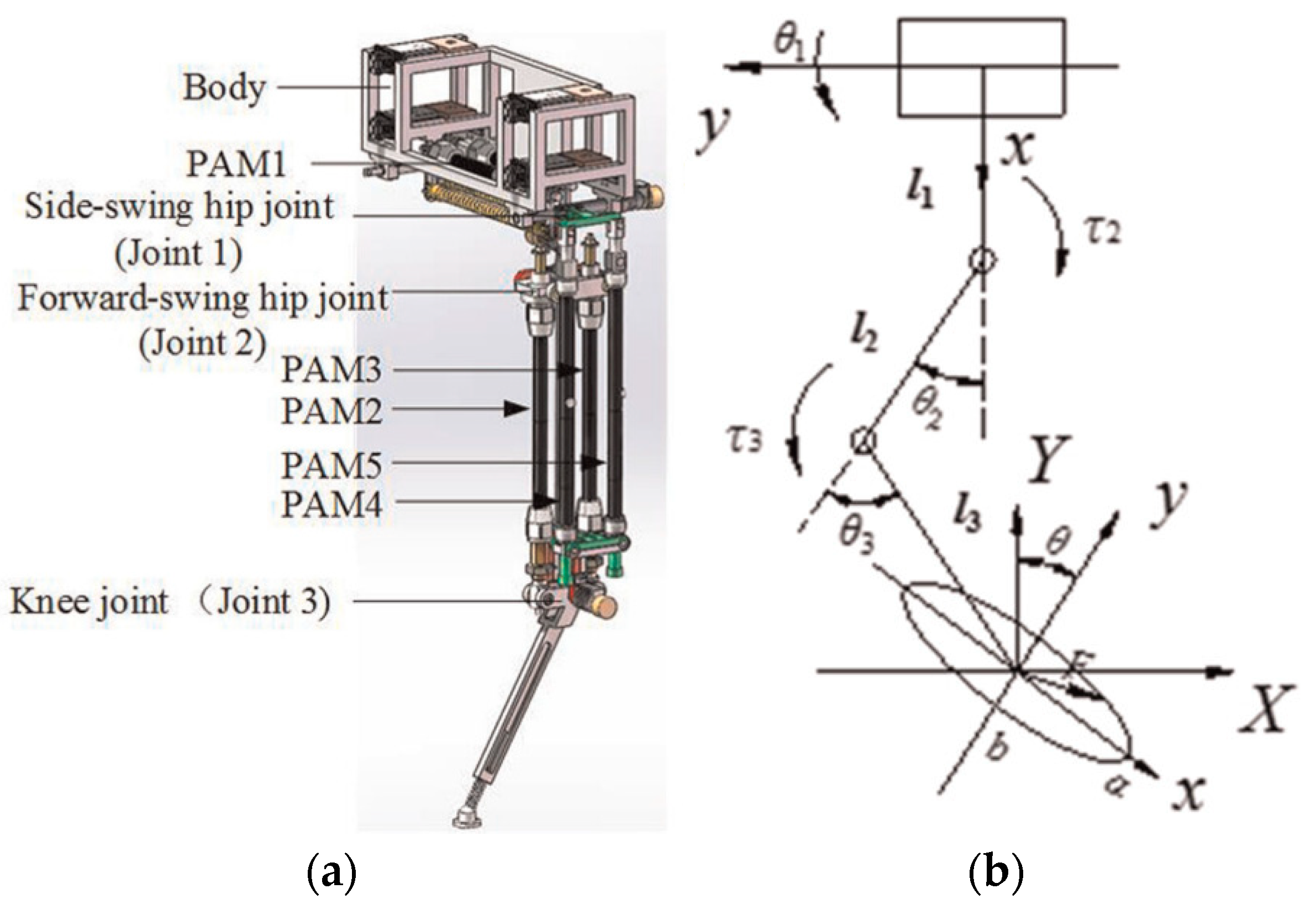
One of the prevailing methodologies for articulating forward kinematics involves the Jacobian framework. The researchers Lei et al. [49] demonstrated this approach in their investigation, with the primary objective of scrutinising variable stiffness within a robotic system comprising pneumatic artificial muscles (PAM). In pursuit of this inquiry, they harnessed the displacements of the robot’s foot in both horizontal and vertical axes, as denoted by Equation (1), and employed the Jacobian J(q) formulation, as shown in Equation (2). By leveraging the parameters a and b, which are linked to the stiffness ellipse, we successfully derived Equation (3), which elucidates the angular stiffness of the robot’s joints by applying the Jacobian matrix. Figure 10 presents this leg with a kinematics model.
In Equation (1), l1 and l2 represent lengths associated with the leg segments, while θ2 and θ3 are angular displacements of the forward-swing hip joint and knee joint.
Another popular way to describe forward kinematics is to use the constant curvature model presented in [50]. This research investigates three spatial domains: the actuator space, configuration space, and task space, linked through two mappings—robot-independent and robot-dependent. The robot-independent mapping connects curvature (4), plane angle φ (5), and arc length (6) in the configuration space to a three-dimensional task space, whereas the robot-dependent mapping bridges the actuator space to the configuration space.
Equations (4), (l1,l2,l3) represent the lengths of the three chambers; d is the average distance between the actuator coaxial centre and each of the three chambers’ coaxial centres.
Numerous studies have explored forward kinematic modelling within the continuum and flexible robotic systems, each presenting distinctive characteristics. For instance, Al-Ibadi et al. [51] introduced a novel-length model tailored to single extensor pneumatic muscle actuators. They demonstrated its integration within a parallel-structured continuum arm, enabling versatile bending behaviour. Similarly, Liu et al. [52] designed a foldable soft manipulator featuring three pneumatic actuators and foldable arms, facilitating shape transformation between contracted and expanded states. This innovative delta robot is well-suited to pick-and-place operations within a hemispherical working space. Moreover, researchers have made notable strides in spatial intrinsic continuum robots driven by pneumatic artificial muscles (PAMs), offering variable stiffness and flexible motions [53,54,55]. A lightweight and compliant multi-joint continuum manipulator, actuated by thin McKibben pneumatic artificial muscles, has also been developed [56]. As a result of these advancements, forward kinematic modelling has become more versatile and dexterous. Furthermore, Xu et al. [57] conducted a comprehensive study of a kinematic model tailored to multi-section continuum arms driven by pneumatic muscle actuators. This model exhibits general applicability and accommodates systems with intricate and multifaceted kinematic characteristics, thus substantially contributing to forward kinematics in continuum robotic arms.
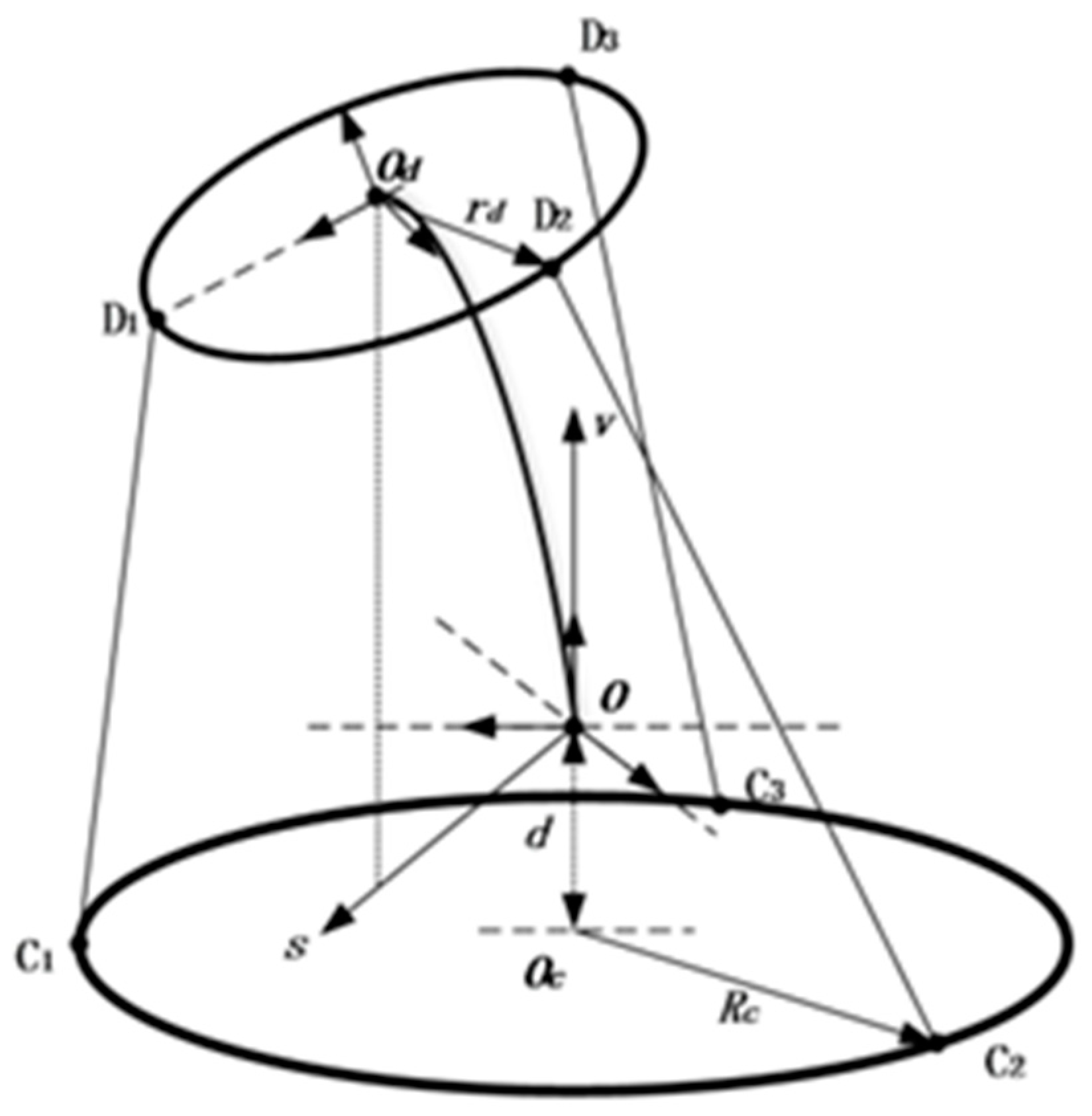
Conversely, inverse kinematics determines the actuation inputs required to achieve a soft robot’s desired pose or configuration. It searches for the appropriate control signals or forces that result in a specific deformation or motion of the robot. Inverse kinematics is needed to precisely control the arm’s movement, grasp items securely, and manipulate objects according to a desired force and orientation. Figure 11 presents an example of inverse kinematic modelling of a hybrid-driven waist rehabilitation robot containing a belt and three PAM systems [58].
The inverse kinematics of the current robot can be represented by Equation (7), which contains the transposed matrix needed to calculate the length of the PAMs.
Here, ϕ is the angle between axis s and axis X; σ is the angle between the horizontal plane and the belt; and Hb is the vertical length of the bending waist.
The rotational matrix E, which transforms coordinates from frame OdXdYdZd to frame OXYZ, can be described by Equation (8), while ϕ and σ are provided.
In Equation (8), Ls is the s coordinate Od for in-frame Osv.
Numerous scholarly contributions emphasising the intricate domain of continuum robots have advanced the field of kinematic modelling in soft robotics. Inverse kinematic modelling has played a central role in this context, enabling precise control of robotic movements. Several studies merit attention for their noteworthy contributions in this regard. To commence, several studies have proposed closed-form kinematic models tailored exclusively to intrinsic continuum robots [59]. These models are of paramount importance in inverse kinematics because they help determine the joint angles or actuator commands required to achieve a desired end-effector position.
Furthermore, notable enhancements have been achieved in modelling soft arms [60], integral components of continuum robots. These improved models have extended the capabilities of inverse kinematic solutions, enabling more accurate control of soft arm movements. In addition to soft arm modelling, novel kinematic models have been introduced to address the challenges associated with multi-section continuum arms [61]. These models contribute to advancing inverse kinematics by providing a framework for precise control in multi-segmented robotic structures.
Furthermore, introducing piecewise affine curvature (PAC) models [62,63] to inverse kinematic modelling has been particularly influential. These PAC models, characterised by their piecewise representation of robot curvature, not only enhance kinematic predictions but also provide a valuable framework for precise control. They help determine optimal joint configurations for continuum robots during inverse kinematics computations. Furthermore, researchers have developed path-planning algorithms tailored exclusively to continuum-arm robots [64]. These algorithms are crucial in inverse kinematic control, enabling efficient and optimised trajectory planning for continuum robotic systems. These contributions have significantly expanded our understanding of inverse kinematic modelling in soft robotics. They provide the foundational knowledge for developing more sophisticated and versatile soft robot systems.
Moreover, these advancements have the potential to revolutionise hybrid robotic systems, particularly in surgical applications. In this context, it is pertinent to mention delta robots with flexible actuation, which use reverse pneumatic artificial muscles (RPAMs) as a critical component. This work, spearheaded by Fernando et al. [65], underscores the practical application of inverse kinematic modelling within a specific robotic system, demonstrating the practical significance of these advancements.
Table 1 presents the research direction for soft robot kinematics.
3.2. Dynamics Modelling
Developing dynamic models for soft robotic manipulators has garnered significant attention. These models aim to capture the unique characteristics of soft robots, such as high compliance, adaptive grasping, and smooth bending, while considering material nonlinearities, hysteresis, and external loadings. The most commonly used methods for modelling continuum arm motion dynamics are the Lagrangian formulation and the Cosserat rod theory.
The Lagrangian formulation, based on Lagrange’s equations of motion, is a powerful tool for analysing the dynamics of complex systems, including soft robots. In this method, the dynamics of the robot are derived from the system’s Lagrangian, which represents the difference between its kinetic and potential energies [66]:
where q represents the generalised coordinates of the system; L is the Lagrangian of the system; M is a generalised inertial matrix; C is a centrifugal/Coriolis force matrix; and G is a conservative force vector.
d/dt (∂L/∂ (q dot)) − ∂L/∂q = Mq + Cq + G
The Lagrangian formulation incorporates various physical effects, such as internal and external forces, damping, and energy dissipation mechanisms.
The Cosserat rod theory represents a soft robot as a series of interconnected rod elements. Each element is characterised by its position, orientation, and curvature. The dynamics of the soft robot are described by a set of partial differential equations, such as linear (10) and angular (11) momentum, which govern the motion and deformation of these rod elements. These equations incorporate the effects of external forces, internal stresses, and the material properties of the soft robot.
ρ·A × ∂2(bar{r})/∂t2 = ∂·(QT·S·σ/e)/∂s + e × bar{f}
In Equation (10), ρ represents the material density; A represents the cross-sectional area of the rod; ∂2(bar{r})/∂t2 represents the second derivative of the position vector bar{r} with respect to time; ∂·(QT·S·σ/e)/∂s represents the partial derivative of the term QT·S·σ/e) with respect to the arc length parameter s; Q is a matrix; S is a matrix related to material properties; σ is the stress tensor; e is the cross-sectional area; and e × bar{f} represents the product of the cross-sectional area e and the external force vector bar{f}.
ρ × I/e × ∂ω/∂t = ∂(B × κ/e3)/∂s + (κ × B × κ)/e3 + (Q × ∂(rs¯)/e × S × σ) + (ρ × I × ω//e)× ω +
+ (ρ × I × ω/e2) × ∂e/∂t + e × c
+ (ρ × I × ω/e2) × ∂e/∂t + e × c
In Equation (11), ρ represents the mass density of the rod; I is the moment of inertia matrix of the rod; e represents the cross-sectional area of the rod; ∂ω/∂t represents the rate of change of the angular velocity vector with respect to time; ∂(B × κ/e3)/∂s represents the partial derivative of the term (B × κ/e3) with respect to the arc length parameter s; (κ × B × κ)/e3 represents the cross product of the curvature vector κ and the product of the matrices B and κ, divided by e3; (Q × ∂(rs¯)/e × S × σ) represents the interaction between the matrices Q; rs¯ (the derivative of the reference frame position vector with respect to s), S, and the stress tensor σ; (ρ × I × ω/e) × ω represents the Lagrangian transport term, where the angular velocity ω interacts with the moment of inertia matrix I, mass density ρ, and cross-sectional area e; (ρ × I × ω/e2) × ∂e/∂t represents the unsteady dilation term, where the rate of change of the cross-sectional area (∂e/∂t) interacts with the moment of inertia matrix I, mass density ρ, and angular velocity ω; and e × c represents the external couple term, where an external couple c interacts with the cross-sectional area. Table 2 presents the direction of research for dynamic soft continuum actuators.
The Lagrange formula has diverse applications in continuum manipulator research, as suggested by various researchers. Their work ranges from singularity-free kinematics and dynamic models to material-based formulations, offering real-time control and trajectory-tracking capabilities to enhance the performance of continuum arms. Therefore, Mustaza et al. [67] introduced a material-based dynamic model for multi-chamber soft continuum manipulators, offering real-time control capabilities through a modified Kelvin–Voigt model. Godage et al. [68] presented a dynamic spatial model for variable-length multi-section continuum arms, ensuring numerical stability and accuracy. To account for material hysteresis and non-linear properties of the material used for PAM [69,70,71], Mishra et al. [72] proposed a mathematical model for a pneumatically actuated multi-segment conic manipulator and demonstrated its effectiveness in trajectory tracking. The developed model made it possible to reduce the standard absolute error associated with hysteresis by a factor of 4 compared to the model obtained through the theory of Cosserat rods.
Trivedi et al. [73] developed a dynamic model that, given the non-linearity of the material and gravity loading, allows the robot to follow a trajectory more accurately.
Furthermore, Godage et al. [74] addressed their research on singularity problems with an improved dynamic model for pneumatic muscle-actuated continuum arms. Sofla et al. [75] researched compliant robotic manipulators using fluidic muscles and incorporating a modified Bouc–Wen model.
Researchers have leveraged diverse methodologies to enhance dynamic modelling techniques and advance the soft robotics field. Drawing from the profound insights of the Cosserat rod theory, which offers a versatile framework for analysing the behaviour of flexible structures, Wang et al. [76], who adopted the paradigm of variable-stiffness beam structures, ingeniously captured the modelling of soft continuum robots’ behaviour. De Payrebrune et al. [77] investigated the applicability of a constitutive relation to pneumatically actuated soft robot arms. Moreover, Abbasi et al. [78] proposed cascaded control architectures and compensation methods for hysteresis in soft pneumatic actuators. Gilbert et al. [79] used the Cosserat rod theory to model bending deformation in soft continuum robotic manipulators. Pourghasemi et al. [80] introduced a conceptual framework for a soft pneumatic manipulator with a trilateral drive system bolstered by a strengthened fibrous encasing. They meticulously computed this manipulator’s dynamic characteristics using the Cosser rod theory and incorporated radial pressure considerations that increased model precision by 16%.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 2.
Direction of research for soft robot dynamics.
| Author | Theoretical Basis | Relative Error | Object of Study |
|---|---|---|---|
| Meng et al. [66] | Lagrange formula | settle out to 0 | length and velocity |
| Mustaza et al. [67] | Lagrange formula | <5% | Position, length, angle |
| Godage et al. [68] | Lagrange formula | ~0.02% | Length |
| Mishra et al. [72] | Cosserat-rod theory | settle out to 0 | Angles |
| Trivedi et al. [73] | Cosserat rod theory | ~5% | Length, angles |
| Godage et al. [74] | Lagrange formula | 11% | Length |
| Sofla et al. [75] | Lagrange formula | 7% | Angles, position |
| Wang et al. [76] | Deflection theorem | <8.5% | Angles, length |
| Pourghasemi et al. [80] | Cosserat rod theory | 1.27% | Position, angles |
| Li et al. [81] | Cosserat rod theory | 5.4% | Position |
| Alessi et al. [82] | Cosserat rod theory | 4.83% | Length |
Furthermore, our study supports Li et al.’s [81] proposed resolution of differentially experimental postulations intrinsic to the Cosserat Rod framework using the piecewise linear deformation method. This approach can be adeptly applied to a pliable, slender, manipulative construct. Fundamentally, this technique involves segmenting the spatial domain into discrete segments, each manifesting distinct deformation characteristics. Simulations showed that this method yields a maximal absolute divergence of only 5 mm, indicating a nominal deviation of approximately 5.4%.
Similarly, Alessi et al. [82] applied a dynamic Cosserat rod model to a 3D-printed pneumatic soft robotic arm. This model accounted for actuators’ irregularities and incorporated a simplified representation of the pneumatic actuation system’s time-dependent response. The model further involves tuning pressure-strain relations for individual pneumatic chambers and capturing the behaviour of proportional pressure-controlled electronic valves. By harnessing the Cosserat rod theory, these contributions demonstrate the versatility and applicability of this theoretical framework in advancing the understanding and capabilities of soft robotic systems.
The choice between Lagrangian mechanics and the Cosserat rod theory for modelling soft robots depends on the specific characteristics and goals of the analysis. Lagrangian mechanics is suitable for a simplified understanding of overall dynamics, which is ideal for simple soft robot designs or scenarios with minimal deformation effects. On the other hand, the Cosserat rod theory excels when complex or highly flexible soft robot structures involve intricate bending, twisting, and deformations.
4. Control of Soft Continuum Robots with PAMs
4.1. Model-Based Control
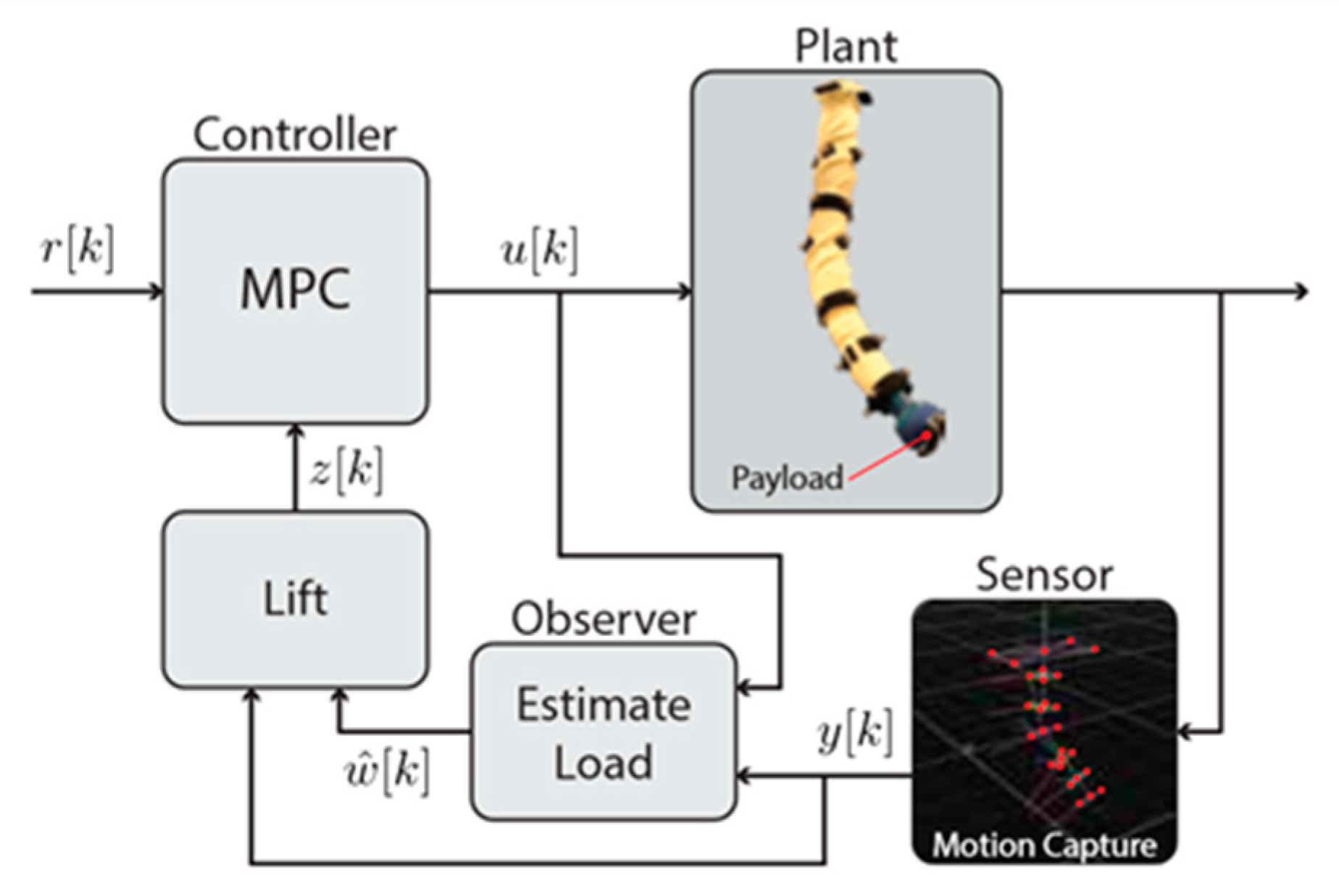
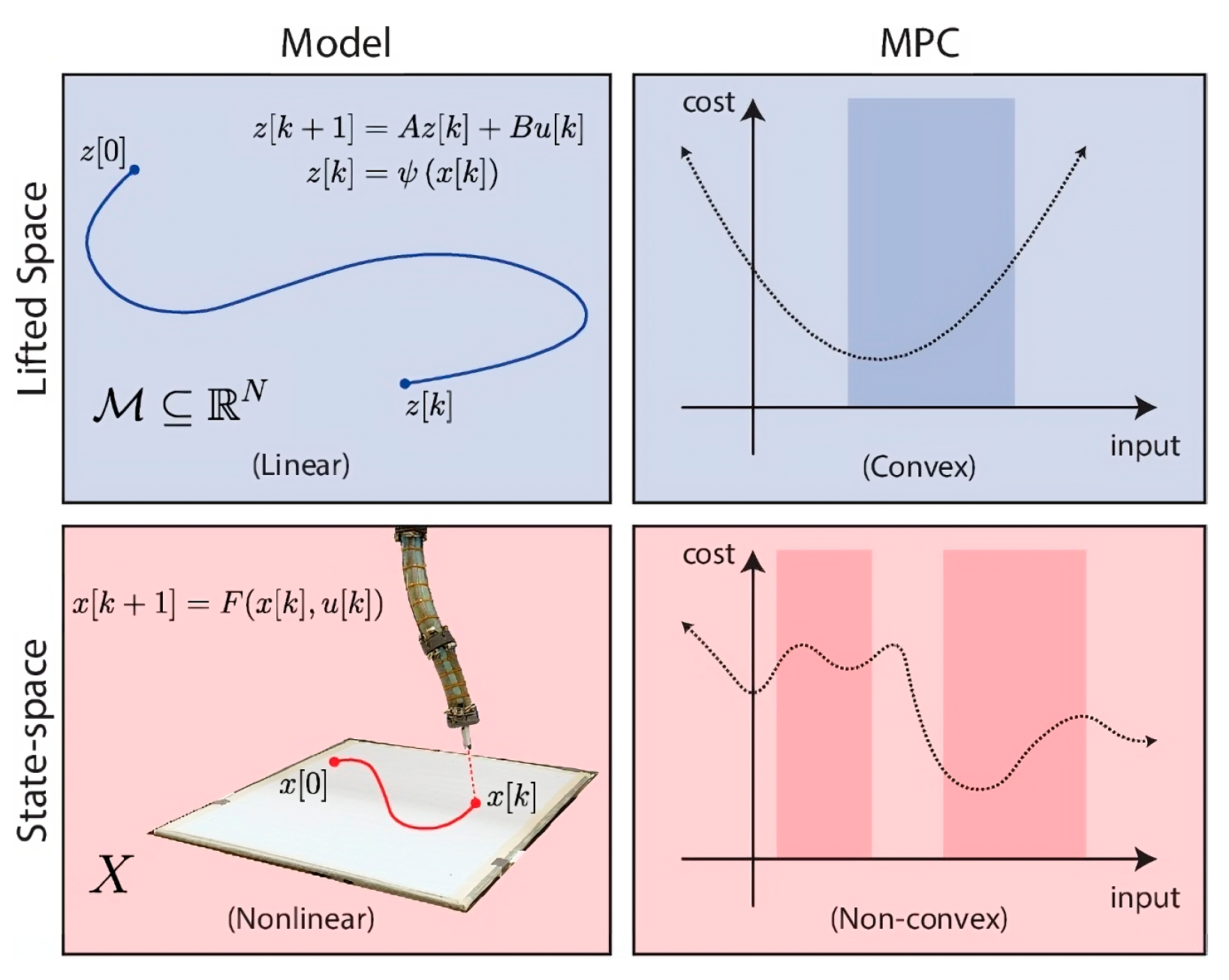
Model-based control strategies are a prominent approach to soft robot control. The fundamental principle behind model-based control is to develop an accurate mathematical representation or model of soft robot dynamics. Model-based control encompasses two main domains: predicting robot behaviour via model-based predictions, linearising the structural framework, and mitigating the influence of hysteresis on robot motions, comprising PAMs. Elgeneidy et al. [83] presented a data-driven approach using empirical models to predict and control the bending angle of a soft pneumatic actuator. Bruder [84] proposed a data-driven approach to consistently controlling soft continuum manipulator arms under variable loading conditions by incorporating a linear Koopman operator model (Figure 12). This operator has a linear transformation that operates on functions of a system’s state variables, allowing us to study the evolution of these functions over time.
Equation (12) presents the mathematical formula connecting the Koopman operator to the infinite-dimensional linear dynamical system.
Here, represents a constant input over the interval , and Kτ represents an infinite-dimensional linear discrete dynamical system that advances the value of an observable by τ.
Bruder et al. [85] described a Koopman model-based control method to construct linear dynamical models and precisely control soft robots. This method reduces outliers and noise in training data and improves model predictive control of t physical soft robotic systems. Figure 13 presents this model-control method.
Thuruthel [86] introduced a model-based policy-learning algorithm for closed-loop dynamic control of soft manipulators and demonstrated the feasibility of developing controllers without an analytical model. This method involves learning a forward dynamic model, generating trajectory samples, and policy learning. The approach requires approximately 2 h of real-world data to construct a closed-loop controller. While the policy architecture resembles Model Predictive Control (MPC), challenges include accommodating dynamic changes and addressing variability caused by factors such as friction.
Model-based control strategies predominantly revolve around using the Bouc–Wen Hysteresis Model (13), specifically tailored to describe hysteresis phenomena in pneumatic muscles, with the primary objective of mitigating its influence.
In Equation (13), the variable u represents a generalised input, and h corresponds to the hysteresis state variable, while the parameters α, β, and γ serve as gain values governing the shape of the hysteresis loop, and m is a parameter that controls the smoothness of the transition from an elastic to a plastic response.
Incorporating the effects of hysteresis, Qin et al. [87] introduced a control strategy that incorporates hysteresis compensation. This strategy is described in Equation (14), resulting in a remarkable fivefold reduction in the regulation error compared to control systems without hysteresis compensation.
In Equation (14), the predicted tracking error is represented by , proportional gain for compensation by kc, and proportional and integral gains for PI controller by kp and ki.
Another study by Liu et al. [88] aimed at developing an adaptive control system using a PI controller contained within the Buck–Wen hysteresis model. Equation (15) represents the control rule describing the implementation of this strategy.
In Equation (15), θ(t) is parameter describing the adaptive system, is a vector describing error regulation, Hq is the state matrix, Kp is the proportional coefficient, Ki is the integral component coefficient, ∏ is a vector, and , are the desired trajectory vectors.
The outcomes derived from implementing this strategy within a controller model demonstrate its capacity to manage external perturbations and inherent uncertainties adeptly.
In conclusion, using model-based control strategies in soft robotics with PAMs is an effective approach. This effectiveness is underscored by the rigorous development of precise mathematical models, which play a pivotal role in predicting robotic behaviour, achieving structural framework linearization, and proficiently mitigating the impact of hysteresis, particularly in robots incorporating pneumatic artificial muscles (PAMs).
4.2. Model-Free Control
In soft robotics, empirical modelling approaches have been explored to enhance control and performance. Al-Ibadi et al. [89] presented a mathematical model that relates muscle elongation to applied pressure, considering weight variations and muscle orientation. Furukawa et al. [90] described a soft robot arm mimicking an octopus arm, implementing feedback control in a master–slave system. Furthermore, Azizkhani et al. [91] investigated control approaches for a one-segment soft robotic arm actuated pneumatically, addressing practical issues such as sensor noise and hysteresis. Khan et al. [92] proposed an experimental study on model-free control algorithms for pneumatic soft robots, comparing different PID controllers. These empirical modelling approaches contribute to developing soft robotics in various applications.
Several studies have explored innovative approaches to the challenges of controlling and modelling soft robots using reinforcement learning (RL). Kang et al. [39] developed a soft robotic arm inspired by an octopus’ anatomy and nervous system using reinforcement learning and neural networks. Thuruthel et al. [93] proposed a first-order dynamical equation to approximate the dynamic behaviour of soft robots, simplifying control development without significant loss of accuracy. Torres et al. [94] investigated the information processing capability of soft continuum arms and identified optimal conditions for implementing reservoir computing. Li et al. [95] introduced ELFNet, an RL-based method that outperformed other learning control policies for continuum robot arms with passive degrees of freedom. Zou et al. [96] presented a two-step approach for the real-time 3D shape estimation of soft manipulators that combined different methods to enhance performance. Wang et al. [97] proposed data-driven modelling strategies using machine learning algorithms for soft continuum robot control and highlighted the effectiveness of learning-based approaches in compensating for modelling uncertainties. Yao et al. [98] demonstrated RL’s potential in achieving autonomous actuation for strip-like soft robots through intelligent deep RL algorithms. Finally, Giannaccini et al. [99] developed a novel design for pneumatically actuated soft arms that decouples stiffness from end-effector positioning, ensuring safety and adaptability in physical human–robot interaction.
Several articles address theoretical and practical challenges in the field of soft robotics. Enrico et al. [100] proposed a control law using passivity-based approaches and adaptive disturbance observers to regulate positions in Cartesian space for soft continuum manipulators with pneumatic actuation. Bruder et al. [101] introduced a methodology based on the fluid Jacobian method to predict the spatial forces generated by fibre-reinforced elastomeric enclosures (FREEs). Gao et al. [102] presented a model-free control strategy for continuum manipulators, ensuring angular position tracking with accuracy and global stability. Veil et al. [103] explored a disturbance observer-based control approach to improve the tracking behaviour of soft robots by actively rejecting estimated model errors as disturbances. Gonthina et al. [104] proposed modelling variable curvature continuum robot sections using Euler spirals, showing improved predictions compared to constant curvature models. Al-Ibadi et al. [105] introduced a novel pneumatic soft actuator with variable stiffness based on an antagonistic mechanism. Young et al. [106] presented a soft robot arm inspired by the twisting movements of the human upper limb. It used pneumatic muscle actuators and a self-bending contraction actuator to twist, contract, and bend.
5. Simulation of Soft Continuum Robots with PAMs
Soft robotics presents unique challenges due to its highly deformable and compliant nature. Modelling and simulating these complex systems require specialised algorithms and computational techniques that differ from traditional rigid robot simulations. As a result, there could be a greater demand for software dedicated to simulating soft robotics.
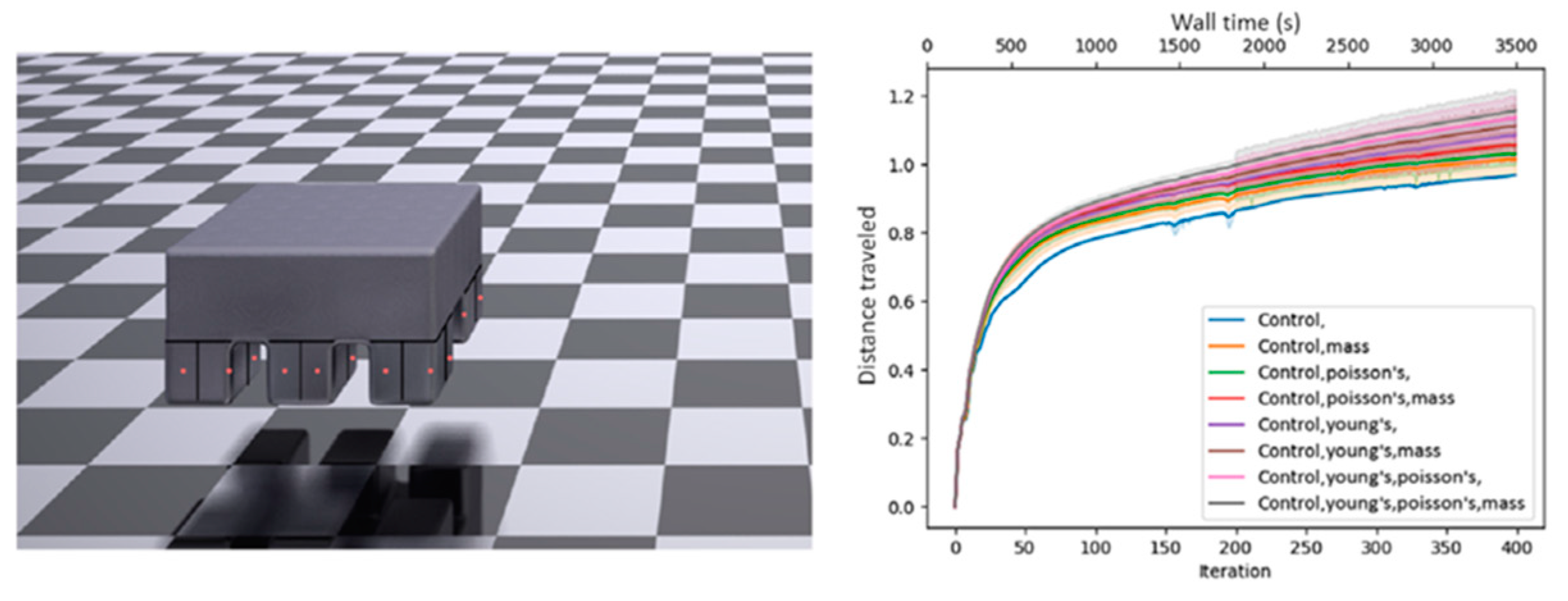
Despite these challenges, researchers have made significant progress in developing software solutions tailored to the specific needs of soft robotics. One such solution is the PneuSoRD system suggested by Young et al. [107]. This open-source control and drive system is designed for pneumatic soft robots by controlling up to 31 pneumatic chambers and acquiring data from 12 pressure sensors. It supports proportional and on–off valves, provides flexibility in valve selection, and offers multiple control algorithm options. Another notable software advancement is ChainQueen, an open-source material point method simulator for soft robotics developed by Spielberg et al. [108]. This simulator enhances simulation efficiency, optimisation, and co-optimisation of material properties and geometric parameters. It provides an easy-to-use, modular application programming interface (API) with predefined models, controllers, actuators, optimizers, and geometric processing tools, thus allowing researchers to prototype complex experiments with minimal lines of code quickly. ChainQueen has demonstrated its capabilities through numerous simulated experiments. Figure 14 depicts the simulation process.
Reinforcement learning (RL) has also been applied to soft robotics and the SoMoGym software toolkit developed by Graule et al. [109]. This software toolkit enables the training and evaluation of controllers using RL techniques. SoMoGym includes benchmark tasks for assessing the performance of soft robots in various interactions while incorporating custom environments and robots. Researchers leveraging RL can tackle previously challenging tasks, particularly those benefiting continuum robots.
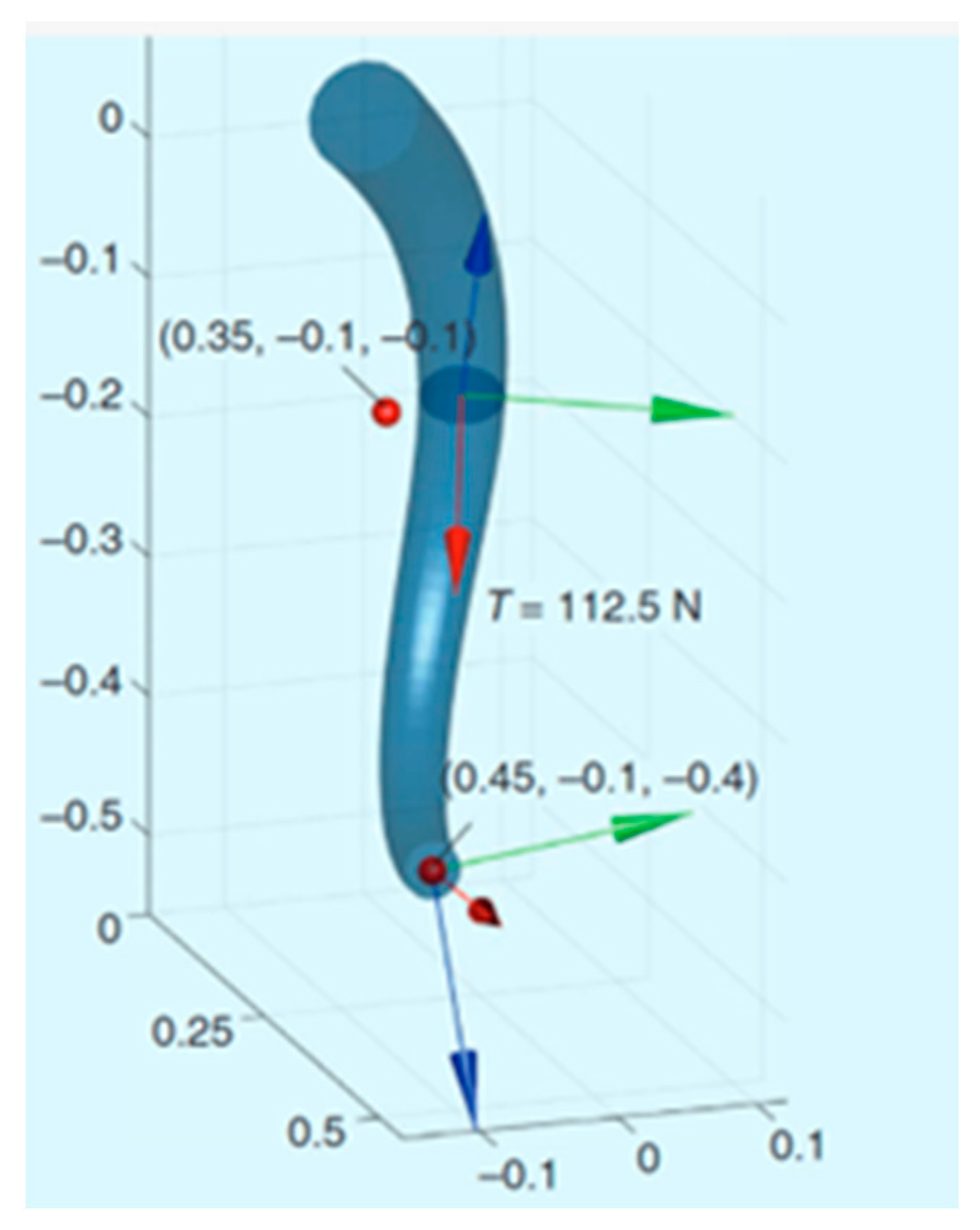
The SoRoSim MATLAB toolbox by Mathew et al. [110] can be used for the static and dynamic analysis of soft, rigid, and hybrid robotic systems. This toolbox bridges the gap between soft and traditional robotics modelling by supporting open, branched, and closed-chain structures. Figure 15 depicts the simulation process using SoRoSim version 2.32.
SoRoSim demonstrates real-time or faster computational performance for most applications, offering a comprehensive solution for modelling and analysing soft robotic systems.
6. Discussion and Conclusions
In this review, we present a comprehensive analysis of the current state of pneumatic continuum arm and soft robots, highlighting their notable advantages compared to rigid robots: exceptional flexibility, adaptability, and safety. The design of soft robots, taking inspiration from biological systems and human hands, is examined, revealing promising avenues for further development. Additionally, the emergence of hybrid robots is recognised as a significant advancement, particularly in scenarios demanding high precision.
Furthermore, the article explores various mathematical models encompassing kinematics, dynamics, and statics, as well as alternative model-free approaches. These theoretical frameworks play a crucial role in comprehending and manipulating the behaviour of soft robots.
However, it is essential to acknowledge that despite substantial progress, soft robots’ practical application and simulation have encountered limitations primarily due to their implementation’s demanding requirements and challenges. Thus, it is imperative to bridge this gap through research and advancement to fully unleash soft robots’ potential in practical applications.
One of those gaps is efficient actuation because PAM devices rely on pressurised air for actuation. Optimising the design to achieve efficient energy conversion and precise control of muscle contractions is a challenge. Designing PAMs that can generate higher forces, faster contractions, and more accurate movements can enhance the overall performance of soft continuum arms.
Another gap is kinematic and dynamic modelling, because establishing accurate kinematic and dynamic models for soft continuum arms with PAMs is challenging due to their inherently compliant and deformable nature. Therefore, research is needed to develop models that can accurately predict the arm’s behaviour under different loading conditions and configurations.
Developing control strategies for soft continuum arms with PAMs is also challenging due to these systems’ nonlinear and compliant behaviour. Research is needed to design control algorithms that can handle the dynamic interactions between the arm and its surroundings while ensuring stability, accuracy, and safety.
Further research on soft PAM and robots will focus on developing dynamic models considering their characteristics and interactions with the environment. We aim to enhance the accuracy and realism of simulations involving soft pneumatic arms. The integration of dynamic models holds promise for expanding the scope of software applications in this field by accurately representing the complex dynamics of soft pneumatic arms. This integration allows them to simulate various scenarios and evaluate their performance on various tasks. Additionally, as dynamic models advance, there will be an anticipated expansion of application areas for such robots and arms, allowing researchers to explore novel domains where these robots can operate effectively.
Author Contributions
Conceptualization, O.S.; literature review, O.S.; formal analysis, M.T.; writing—original draft preparation, O.S.; writing—review and editing, A.H.; supervision, A.H. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the project VEGA 1/0061/23, “Research of modelling and control of soft continuum arms based on fluidic muscles using bio-inspired computational methods”, granted by the Ministry of Education, Science, Research and Sport of the Slovak Republic
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Tang, X.; Li, H.; Ma, T.; Yang, Y.; Luo, J.; Wang, H.; Jiang, P. A Review of Soft Actuator Motion: Actuation, Design, Manufacturing and Applications. Actuators 2022, 11, 331. [Google Scholar] [CrossRef]
- Xavier, M.S.; Tawk, C.D.; Zolfagharian, A.; Pinskier, J.; Howard, D.; Young, T.; Lai, J.; Harrison, S.M.; Yong, Y.K.; Bodaghi, M.; et al. Soft Pneumatic Actuators: A Review of Design, Fabrication, Modeling, Sensing, Control and Applications. IEEE Access 2022, 10, 59442–59485. [Google Scholar] [CrossRef]
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft Robotics: Biological Inspiration, State of the Art, and Future Research. Appl. Bionics Biomech. 2008, 5, 99–117. [Google Scholar] [CrossRef]
- Xu, F.; Wang, H. Soft Robotics: Morphology and Morphology-inspired Motion Strategy. IEEE/CAA J. Autom. Sin. 2021, 8, 1500–1522. [Google Scholar] [CrossRef]
- Alici, G. Softer is Harder: What Differentiates Soft Robotics from Hard Robotics? MRS Adv. 2018, 3, 1557–1568. [Google Scholar] [CrossRef]
- Walker, I.D. Continuous Backbone “Continuum” Robot Manipulators. Int. Sch. Res. Not. 2013, 2013, e726506. [Google Scholar] [CrossRef]
- Renda, F.; Boyer, F.; Dias, J.; Seneviratne, L. Discrete Cosserat Approach for Multisection Soft Manipulator Dynamics. IEEE Trans. Robot. 2018, 34, 1518–1533. [Google Scholar] [CrossRef]
- Martin, Y.J.; Bruder, D.; Wood, R.J. A Proprioceptive Method for Soft Robots Using Inertial Measurement Units. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 9379–9384. [Google Scholar]
- Spielberg, A.; Amini, A.; Chin, L.; Matusik, W.; Rus, D. Co-Learning of Task and Sensor Placement for Soft Robotics. IEEE Robot. Autom. Lett. 2021, 6, 1208–1215. [Google Scholar] [CrossRef]
- Wang, J.; Chortos, A. Control Strategies for Soft Robot Systems. Adv. Intell. Syst. 2022, 4, 2100165. [Google Scholar] [CrossRef]
- Kalita, B.; Leonessa, A.; Dwivedy, S.K. A Review on the Development of Pneumatic Artificial Muscle Actuators: Force Model and Application. Actuators 2022, 11, 288. [Google Scholar] [CrossRef]
- Zaghloul, A.; Bone, G.M. Origami-Inspired Soft Pneumatic Actuators: Generalization and Design Optimization. Actuators 2023, 12, 72. [Google Scholar] [CrossRef]
- Grissom, M.D.; Chitrakaran, V.; Dienno, D.; Csencits, M.; Pritts, M.; Jones, B.; McMahan, W.; Dawson, D.; Rahn, C.; Walker, I. Design and experimental testing of the OctArm soft robot manipulator. In Proceedings of the SPIE—The International Society for Optical Engineering, Orlando, FL, USA, 9 May 2006; p. 10. [Google Scholar]
- Tauber, F.; Desmulliez, M.P.Y.; Piccin, O.; Stokes, A.A. Perspective for soft robotics: The field’s past and future. Bioinspiration Biomim. 2023, 18, 035001. [Google Scholar] [CrossRef] [PubMed]
- Seleem, I.A.; El-Hussieny, H.; Ishii, H. Recent Developments of Actuation Mechanisms for Continuum Robots: A Review. Int. J. Control. Autom. Syst. 2023, 21, 1592–1609. [Google Scholar] [CrossRef] [PubMed]
- Zang, X.; Liu, Y.; Heng, S.; Lin, Z.; Zhao, J. Position control of a single pneumatic artificial muscle with hysteresis compensation based on modified Prandtl–Ishlinskii model. Bio-Med. Mater. Eng. 2017, 28, 131–140. [Google Scholar] [CrossRef]
- Šitum, Ž.; Herceg, S.; Bolf, N.; Andrijić, Ž.U. Design, Construction and Control of a Manipulator Driven by Pneumatic Artificial Muscles. Sensors 2023, 23, 776. [Google Scholar] [CrossRef] [PubMed]
- Su, H.; Hou, X.; Zhang, X.; Qi, W.; Cai, S.; Xiong, X.; Guo, J. Pneumatic Soft Robots: Challenges and Benefits. Actuators 2022, 11, 92. [Google Scholar] [CrossRef]
- Yang, H.D. Modeling and Analysis of a Novel Pneumatic Artificial Muscle and Pneumatic Arm Exoskeleton. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2017. [Google Scholar]
- Pritts, M.B.; Rahn, C.D. Design of an artificial muscle continuum robot. In Proceedings of the IEEE International Conference on Robotics and Automation, 2004 Proceedings, ICRA ’04. 2004, New Orleans, LA, USA, 26 April–1 May 2004. [Google Scholar]
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S. The design and mathematical modelling of novel extensor bending pneumatic artificial muscles (EBPAMs) for soft exoskeletons. Robot. Auton. Syst. 2018, 99, 63–74. [Google Scholar] [CrossRef]
- Faudzi, A.A.M.; Razif, M.R.M.; Endo, G.; Nabae, H.; Suzumori, K. Soft-amphibious robot using thin and soft McKibben actuator. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 981–986. [Google Scholar]
- Faudzi, A.A.; Azmi, N.I.; Sayahkarajy, M.; Xuan, W.L.; Suzumori, K. Soft manipulator using thin McKibben actuator. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 334–339. [Google Scholar]
- Nakamura, T. Experimental comparisons between McKibben type artificial muscles. In Smart Structures, Devices, and Systems III; SPIE: Bellingham, WA, USA, 2006; p. 641426. [Google Scholar]
- Saggin, B.; Scaccabarozzi, D.; Tarbini, M.; Magni, M.; Biffi, C.A.; Tuissi, A. Design of a smart bidirectional actuator for space operation. Smart Mater. Struct. 2017, 26, 035041. [Google Scholar] [CrossRef]
- Carello, M.; Ferraresi, C.; Visconte, C. A New Flexible Pneumatic Finger for a Fruit Harvesting Hand. In Proceedings of the 7th International Symposium on Fluid Control, Measurement and Visualization, Sorrento, Italy, 25–28 August 2003. [Google Scholar]
- Zhu, Y.; Chu, K.; Chen, X.; Wang, X.; Su, H. Research and application of a multi-degree-of-freedom soft actuator. Sens. Actuators A Phys. 2022, 338, 113492. [Google Scholar] [CrossRef]
- Greer, J.D.; Morimoto, T.K.; Okamura, A.M.; Hawkes, E.W. Series pneumatic artificial muscles (sPAMs) and application to a soft continuum robot. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5503–5510. [Google Scholar]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. A Robot Continuum Arm Inspired by the Human Upper Limb: The Pronation and Supination Rotating Behaviour. In Proceedings of the 2020 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), Istanbul, Turkey, 12–13 June 2020. [Google Scholar]
- Petre, I.M. An approach regarding some performances of a FESTO pneumatic muscle actuator. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1009, 012047. [Google Scholar] [CrossRef]
- Yukisawa, T.; Nishikawa, S.; Niiyama, R.; Kawahara, Y.; Kuniyoshi, Y. Ceiling continuum arm with extensible pneu-matic actuators for desktop workspace. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 196–201. [Google Scholar]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. Cooperative project by self-bending continuum arms. In Proceedings of the 2017 23rd International Conference on Automation and Computing (ICAC), Huddersfield, UK, 7–8 September 2017; pp. 1–6. [Google Scholar]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S.; Theodoridis, T. Design of Two Segments Continuum Robot Arm Based on Pneumatic Muscle Actuator (PMA). In Proceedings of the 2018 24th International Conference on Automation and Computing (ICAC), Newcastle Upon Tyne, UK, 6–7 September 2018; pp. 1–6. [Google Scholar]
- Tuleja, P.; Jánoš, R.; Semjon, J.; Sukop, M.; Marcinko, P. Analysis of the Antagonistic Arrangement of Pneumatic Muscles Inspired by a Biological Model of the Human Arm. Actuators 2023, 12, 204. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. Novel models for the extension pneumatic muscle actuator performances. In Proceedings of the 2017 23rd International Conference on Automation and Computing (ICAC), Huddersfield, UK, 7–8 September 2017; pp. 1–6. [Google Scholar]
- Park, Y.L.; Wood, R.J. Smart pneumatic artificial muscle actuator with embedded microfluidic sensing. In Proceedings of the SENSORS 2013 IEEE, Baltimore, MD, USA, 3–6 November 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Hassan, T.; Cianchetti, M.; Mazzolai, B.; Laschi, C.; Dario, P. Active-Braid, a Bioinspired Continuum Manipulator. IEEE Robot. Autom. Lett. 2017, 2, 2104–2110. [Google Scholar] [CrossRef]
- Kang, R.; Branson, D.T.; Zheng, T.; Guglielmino, E.; Caldwell, D.G. Design, modeling and control of a pneumatically actuated manipulator inspired by biological continuum structures. Bioinspiration Biomim. 2013, 8, 036008. [Google Scholar] [CrossRef] [PubMed]
- Kang, R.; Guglielmino, E.; Zullo, L.; Branson, D.T.; Godage, I.; Caldwell, D.G. Embodiment design of soft continuum robots. Adv. Mech. Eng. 2016, 8, 1687814016643302. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. Design, Kinematics and Controlling a Novel Soft Robot Arm with Parallel Motion. Robotics 2018, 7, 19. [Google Scholar] [CrossRef]
- Lopez, M.; Haghshenas-Jaryani, M. A Study of Energy-Efficient and Optimal Locomotion in a Pneumatic Artificial Muscle-Driven Snake Robot. Robotics 2023, 12, 89. [Google Scholar] [CrossRef]
- Fan, J.-Z.; Zhang, W.; Kong, P.-C.; Cai, H.-G.; Liu, G.-F. Design and Dynamic Model of a Frog-inspired Swimming Robot Powered by Pneumatic Muscles. Chin. J. Mech. Eng. 2017, 30, 1123–1132. [Google Scholar] [CrossRef]
- Harsono, E.; Yang, J.; Bhattacharya, S.; Yu, H. Design and analysis of a novel hybrid-driven continuum robot with variable stiffness. Mech. Mach. Theory 2022, 177, 105067. [Google Scholar] [CrossRef]
- Yang, H.D.; Asbeck, A.T. Design and Characterization of a Modular Hybrid Continuum Robotic Manipulator. IEEE/ASME Trans. Mechatron. 2020, 25, 2812–2823. [Google Scholar] [CrossRef]
- Ahmad Sharbafi, M.; Shin, H.; Zhao, G.; Hosoda, K.; Seyfarth, A. Electric-Pneumatic Actuator: A New Muscle for Locomotion. Actuators 2017, 6, 30. [Google Scholar] [CrossRef]
- Ohta, P.; Valle, L.; King, J.; Low, K.; Yi, J.; Atkeson, C.G.; Park, Y.-L. Design of a Lightweight Soft Robotic Arm Using Pneumatic Artificial Muscles and Inflatable Sleeves. Soft Robot. 2018, 5, 204–215. [Google Scholar] [CrossRef] [PubMed]
- Sun, C.; Chen, L.; Liu, J.; Dai, J.S.; Kang, R. A hybrid continuum robot based on pneumatic muscles with embedded elastic rods. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 234, 318–328. [Google Scholar] [CrossRef]
- Nazari, A.A.; Castro, D.; Godage, I.S. Forward and Inverse Kinematics of a Single Section Inextensible Continuum Arm. arXiv 2019, arXiv:1907.06518. [Google Scholar]
- Lei, J.; Zhu, J.; Xie, P.; Tokhi, M. Joint variable stiffness of musculoskeletal leg mechanism for quadruped robot. Adv. Mech. Eng. 2017, 9, 1687814017690342. [Google Scholar] [CrossRef]
- Wang, X.; Geng, T.; Elsayed, Y.; Saaj, C.; Lekakou, C. A unified system identification approach for a class of pneumat-ically-driven soft actuators. Robot. Auton. Syst. 2015, 63, 136–149. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. Design, implementation and modelling of the single and multiple extensor pneumatic muscle actuators. Syst. Sci. Control. Eng. 2018, 6, 80–89. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, X.; Wang, J.; Wu, Z.; Chen, X.; Zhao, Y. Design, Modelling and Implementation of a Foldable Pneumatic Soft Manipulator. Microgravity Sci. Technol. 2022, 34, 44. [Google Scholar] [CrossRef]
- Kim, R.-H.; Kang, C.-H.; Bae, J.-H.; Kang, B.-S. Development of a continuum robot using pneumatic artificial muscles. In Proceedings of the 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014), Gyeonggi-do, Korea, 22–25 October 2014; pp. 1401–1403. [Google Scholar]
- Chen, Y.; Zhang, J.; Gong, Y. Novel Design and Modeling of a Soft Pneumatic Actuator Based on Antagonism Mechanism. Actuators 2020, 9, 107. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiang, C.; Yang, H.; Li, Y.; Hao, L. Static analysis of novel continuum robot driven by PAMs. In Proceedings of the 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China, 19–22 August 2016; pp. 96–100. [Google Scholar]
- Peng, Y.; Liu, Y.; Yang, Y.; Liu, N.; Sun, Y.; Liu, Y.; Pu, H.; Xie, S.; Luo, J. Development of continuum manipulator actuated by thin McKibben pneumatic artificial muscle. Mechatronics 2019, 60, 56–65. [Google Scholar] [CrossRef]
- Xu, Y.; Guo, X.; Li, J.; Huo, X.; Sun, H.; Zhang, G.; Xing, Q.; Liu, M.; Ma, T.; Ding, Q. Impedance Iterative Learning Backstepping Control for Output-Constrained Multisection Continuum Arms Based on PMA. Micromachines 2022, 13, 1532. [Google Scholar] [CrossRef]
- Zi, B.; Yin, G.; Zhang, D. Design and Optimization of a Hybrid-Driven Waist Rehabilitation Robot. Sensors 2016, 16, 2121. [Google Scholar] [CrossRef] [PubMed]
- Kang, B.-S.; Park, E.J. Modeling and control of an intrinsic continuum robot actuated by pneumatic artificial muscles. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; pp. 1157–1162. [Google Scholar]
- Müller, D.; Sawodny, O. Modeling the Soft Bellows of the Bionic Soft Arm. IFAC-PapersOnLine 2022, 55, 229–234. [Google Scholar] [CrossRef]
- Godage, I.S.; Guglielmino, E.; Branson, D.T.; Medrano-Cerda, G.A.; Caldwell, D.G. Novel modal approach for kinematics of multisection continuum arms. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1093–1098. [Google Scholar]
- Jang, J.H.; Jamil, B.; Moon, Y.; Coutinho, A.; Park, G.; Rodrigue, H. Design of Gusseted Pouch Motors for Improved Soft Pneumatic Actuation. IEEE/ASME Trans. Mechatron. 2023, 1–11. [Google Scholar] [CrossRef]
- Stella, F.; Guan, Q.; Della Santina, C.; Hughes, J. Piecewise Affine Curvature model: A Reduced-Order Model for Soft Robot-Environment Interaction Beyond PCC. In Proceedings of the 2023 IEEE International Conference on Soft Robotics (RoboSoft), Singapore, 3–7 April 2023. [Google Scholar]
- Deng, J.; Meng, B.H.; Kanj, I.; Godage, I.S. Near-optimal Smooth Path Planning for Multisection Continuum Arms. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 416–421. [Google Scholar]
- Fernando, Y.; Parnichkun, M. Development and Control of a Flexible Actuation-Based Delta Robot. In Proceedings of the IECON 2022—48th Annual Conference of the IEEE Industrial Electronics Society, Brussels, Belgium, 17–20 October 2022; pp. 1–6. [Google Scholar]
- Meng, F.; Lv, Y.; Ma, G.; Zhu, Y. A Model-Based Sliding-Mode Tracking Controller for Pneumatic Muscle Actuated Continuum Arms. In Proceedings of the 2018 Eighth International Conference on Instrumentation & Measurement, Computer, Communication and Control (IMCCC), Harbin, China, 19–21 July 2018; pp. 636–640. [Google Scholar] [CrossRef]
- Mustaza, S.M.; Elsayed, Y.; Lekakou, C.; Saaj, C.; Fras, J. Dynamic Modeling of Fiber-Reinforced Soft Manipulator: A Visco-Hyperelastic Material-Based Continuum Mechanics Approach. Soft Robot. 2019, 6, 305–317. [Google Scholar] [CrossRef]
- Godage, I.S.; Medrano-Cerda, G.A.; Branson, D.T.; Guglielmino, E.; Caldwell, D.G. Dynamics for variable length multisection continuum arms. Int. J. Robot. Res. 2016, 35, 695–722. [Google Scholar] [CrossRef]
- Minh, T.V.; Tjahjowidodo, T.; Ramon, H.; Van Brussel, H. Control of a pneumatic artificial muscle (PAM) with model-based hysteresis compensation. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 1082–1087. [Google Scholar]
- Van Damme, M.; Beyl, P.; Vanderborght, B.; Van Ham, R.; Vanderniepen, I.; Versluys, R.; Daerden, F.; Lefeber, D. Modeling Hysteresis in Pleated Pneumatic Artificial Muscles. In Proceedings of the 2008 IEEE Conference on Robotics, Automation and Mechatronics, Chengdu, China, 21–24 September 2008; pp. 471–476. [Google Scholar] [CrossRef]
- Xie, S.; Liu, H.; Wang, Y. A method for the length-pressure hysteresis modeling of pneumatic artificial muscles. Sci. China Technol. Sci. 2020, 63, 829–837. [Google Scholar] [CrossRef]
- Mishra, M.K.; Samantaray, A.K.; Chakraborty, G. Fractional-order Bouc-wen hysteresis model for pneumatically actuated continuum manipulator. Mech. Mach. Theory 2022, 173, 104841. [Google Scholar] [CrossRef]
- Trivedi, D.; Lotfi, A.; Rahn, C.D. Geometrically exact dynamic models for soft robotic manipulators. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1497–1502. [Google Scholar]
- Godage, I.S.; Branson, D.T.; Guglielmino, E.; Caldwell, D.G. Pneumatic muscle actuated continuum arms: Modelling and experimental assessment. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 4980–4985. [Google Scholar] [CrossRef]
- Sofla, M.S.; Sadigh, M.J.; Zareinejad, M. Design and dynamic modeling of a continuum and compliant manipulator with large workspace. Mech. Mach. Theory 2021, 164, 104413. [Google Scholar] [CrossRef]
- Wang, M.; Wang, W.; Qiu, Z.; Zhao, J.; Wu, C.; Cai, S.; Bao, G. Modeling the Soft Continuum Robot Based on Large Deflection Theorem. In Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 27–31 December 2021; pp. 209–214. [Google Scholar]
- de Payrebrune, K.M.; O’Reilly, O.M. On the development of rod-based models for pneumatically actuated soft robot arms: A five-parameter constitutive relation. Int. J. Solids Struct. 2017, 120, 226–235. [Google Scholar] [CrossRef]
- Abbasi, P.; Nekoui, M.A.; Zareinejad, M.; Abbasi, P.; Azhang, Z. Position and Force Control of a Soft Pneumatic Actuator. Soft Robot. 2020, 7, 550–563. [Google Scholar] [CrossRef]
- Gilbert, H.B.; Godage, I.S. Validation of an Extensible Rod Model for Soft continuum Manipulators. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 711–716. [Google Scholar]
- Hanza, S.P.; Ghafarirad, H. Mechanics of fiber-reinforced soft manipulators based on inhomogeneous Cosserat rod theory. Mech. Adv. Mater. Struct. 2023, 1–13. [Google Scholar] [CrossRef]
- Li, H.; Xun, L.; Zheng, G. Piecewise Linear Strain Cosserat Model for Soft Slender Manipulator. IEEE Trans. Robot. 2023, 39, 2342–2359. [Google Scholar] [CrossRef]
- Alessi, C.; Falotico, E.; Lucantonio, A. Ablation Study of a Dynamic Model for a 3D-Printed Pneumatic Soft Robotic Arm. IEEE Access 2023, 11, 37840–37853. [Google Scholar] [CrossRef]
- Elgeneidy, K.; Lohse, N.; Jackson, M. Bending angle prediction and control of soft pneumatic actuators with embedded flex sensors—A data-driven approach. Mechatronics 2018, 50, 234–247. [Google Scholar] [CrossRef]
- Bruder, D.; Fu, X.; Gillespie, R.B.; Remy, C.D.; Vasudevan, R. Koopman-Based Control of a Soft Continuum Manipulator Under Variable Loading Conditions. IEEE Robot. Autom. Lett. 2021, 6, 6852–6859. [Google Scholar] [CrossRef]
- Bruder, D.; Gillespie, B.; Remy, C.D.; Vasudevan, R. Modeling and Control of Soft Robots Using the Koopman Operator and Model Predictive Control. arXiv 2019, arXiv:1902.02827. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Falotico, E.; Renda, F.; Laschi, C. Model-Based Reinforcement Learning for Closed-Loop Dynamic Control of Soft Robotic Manipulators. IEEE Trans. Robot. 2018, 35, 124–134. [Google Scholar] [CrossRef]
- Qin, Y.; Zhang, H.; Wang, X.; Han, J. Active Model-Based Hysteresis Compensation and Tracking Control of Pneumatic Artificial Muscle. Sensors 2022, 22, 364. [Google Scholar] [CrossRef]
- Liu, G.; Sun, N.; Yang, T.; Liu, Z.; Fang, Y. Equivalent-input-disturbance rejection-based adaptive motion control for pneumatic artificial muscle arms via hysteresis compensation models. Control. Eng. Pract. 2023, 138, 105609. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S. 3D position mapping of continuum arm. In Proceedings of the 2016 International Conference for Students on Applied Engineering (ICSAE), Newcastle, UK, 20–21 October 2016; pp. 1–6. [Google Scholar]
- Furukawa, S.; Wakimoto, S.; Kanda, T.; Hagihara, H. A Soft Master-Slave Robot Mimicking Octopus Arm Structure Using Thin Artificial Muscles and Wire Encoders. Actuators 2019, 8, 40. [Google Scholar] [CrossRef]
- Azizkhani, M.; Godage, I.S.; Chen, Y. Dynamic Control of Soft Robotic Arm: A Simulation Study. IEEE Robot. Autom. Lett. 2022, 7, 3584–3591. [Google Scholar] [CrossRef]
- Khan, A.H.; Shao, Z.; Li, S.; Wang, Q.; Guan, N. Which is the best PID variant for pneumatic soft robots an experimental study. IEEE/CAA J. Autom. Sin. 2020, 7, 451–460. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Renda, F.; Iida, F. First-Order Dynamic Modeling and Control of Soft Robots. Front. Robot. AI 2020, 7, 95. [Google Scholar] [CrossRef]
- Torres, E.; Nakajima, K.; Godage, I.S. Information Processing Capability of Soft Continuum Arms. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 441–447. [Google Scholar]
- Li, M.; Kang, R.; Branson, D.T.; Dai, J.S. Model-Free Control for Continuum Robots Based on an Adaptive Kalman Filter. IEEE/ASME Trans. Mechatron. 2017, 23, 286–297. [Google Scholar] [CrossRef]
- Zou, S.; Lyu, Y.; Qi, J.; Ma, G.; Guo, Y. A deep neural network approach for accurate 3D shape estimation of soft manipulator with vision correction. Sens. Actuators A Phys. 2022, 344, 113692. [Google Scholar] [CrossRef]
- Wang, X.; Li, Y.; Kwok, K.-W. A Survey for Machine Learning-Based Control of Continuum Robots. Front. Robot. AI 2021, 8, 730330. [Google Scholar] [CrossRef]
- Yao, J.; Cao, Q.; Ju, Y.; Sun, Y.; Liu, R.; Han, X.; Li, L. Adaptive Actuation of Magnetic Soft Robots Using Deep Rein-forcement Learning. Adv. Intell. Syst. 2023, 5, 2200339. [Google Scholar] [CrossRef]
- Giannaccini, M.E.; Xiang, C.; Atyabi, A.; Theodoridis, T.; Nefti-Meziani, S.; Davis, S.; Shen, Z.; Zhong, H.; Xu, E.; Zhang, R.; et al. Novel Design of a Soft Lightweight Pneumatic Continuum Robot Arm with Decoupled Variable Stiffness and Positioning. Soft Robot. 2018, 5, 54–70. [Google Scholar] [CrossRef]
- Franco, E.; Casanovas, A.G.; Tang, J.; Baena, F.R.Y.; Astolfi, A. Position regulation in Cartesian space of a class of inextensible soft continuum manipulators with pneumatic actuation. Mechatronics 2021, 76, 102573. [Google Scholar] [CrossRef]
- Bruder, D.; Sedal, A.; Vasudevan, R.; Remy, C.D. Force Generation by Parallel Combinations of Fiber-Reinforced Fluid-Driven Actuators. IEEE Robot. Autom. Lett. 2018, 3, 3999–4006. [Google Scholar] [CrossRef]
- Gao, X.; Li, X.; Sun, Y.; Hao, L.; Yang, H.; Xiang, C. Model-Free Tracking Control of Continuum Manipulators with Global Stability and Assigned Accuracy. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1345–1355. [Google Scholar] [CrossRef]
- Veil, C.; Müller, D.; Sawodny, O. Nonlinear disturbance observers for robotic continuum manipulators. Mechatronics 2021, 78, 102518. [Google Scholar] [CrossRef]
- Gonthina, P.S.; Kapadia, A.D.; Godage, I.S.; Walker, I.D. Modeling Variable Curvature Parallel Continuum Robots Using Euler Curves. In Proceedings of the in 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 1679–1685. [Google Scholar]
- Al-Ibadi, A.; Nefti-Meziani, S.; Davis, S.; Theodoridis, T. Novel Design and Position Control Strategy of a Soft Robot Arm. Robotics 2018, 7, 72. [Google Scholar] [CrossRef]
- Al-Ibadi, A.; Abbas, K.A.; Al-Atwani, M.; Al-Fahaam, H. Design, Implementation, and Kinematics of a Twisting Robot Continuum Arm Inspired by Human Forearm Movements. Robotics 2022, 11, 55. [Google Scholar] [CrossRef]
- Young, T.R.; Xavier, M.S.; Yong, Y.K.; Fleming, A.J. A control and drive system for pneumatic soft robots: Pneusord. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021. [Google Scholar]
- Spielberg, A.; Du, T.; Hu, Y.; Rus, D.; Matusik, W. Advanced soft robot modeling in ChainQueen. Robotica 2021, 41, 74–104. [Google Scholar] [CrossRef]
- Graule, M.A.; McCarthy, T.P.; Teeple, C.B.; Werfel, J.; Wood, R.J. SoMoGym: A Toolkit for Developing and Evaluating Controllers and Reinforcement Learning Algorithms for Soft Robots. IEEE Robot. Autom. Lett. 2022, 7, 4071–4078. [Google Scholar] [CrossRef]
- Mathew, A.T.; Ben Hmida, I.M.; Armanini, C.; Boyer, F.; Renda, F. SoRoSim: A MATLAB Toolbox for Hybrid Rigid-Soft Robots Based on the Geometric Variable-Strain Approach. IEEE Robot. Autom. Mag. 2022, 30, 2–18. [Google Scholar] [CrossRef]
Figure 1.
Operating principle of PAMs [17].
Figure 1.
Operating principle of PAMs [17].
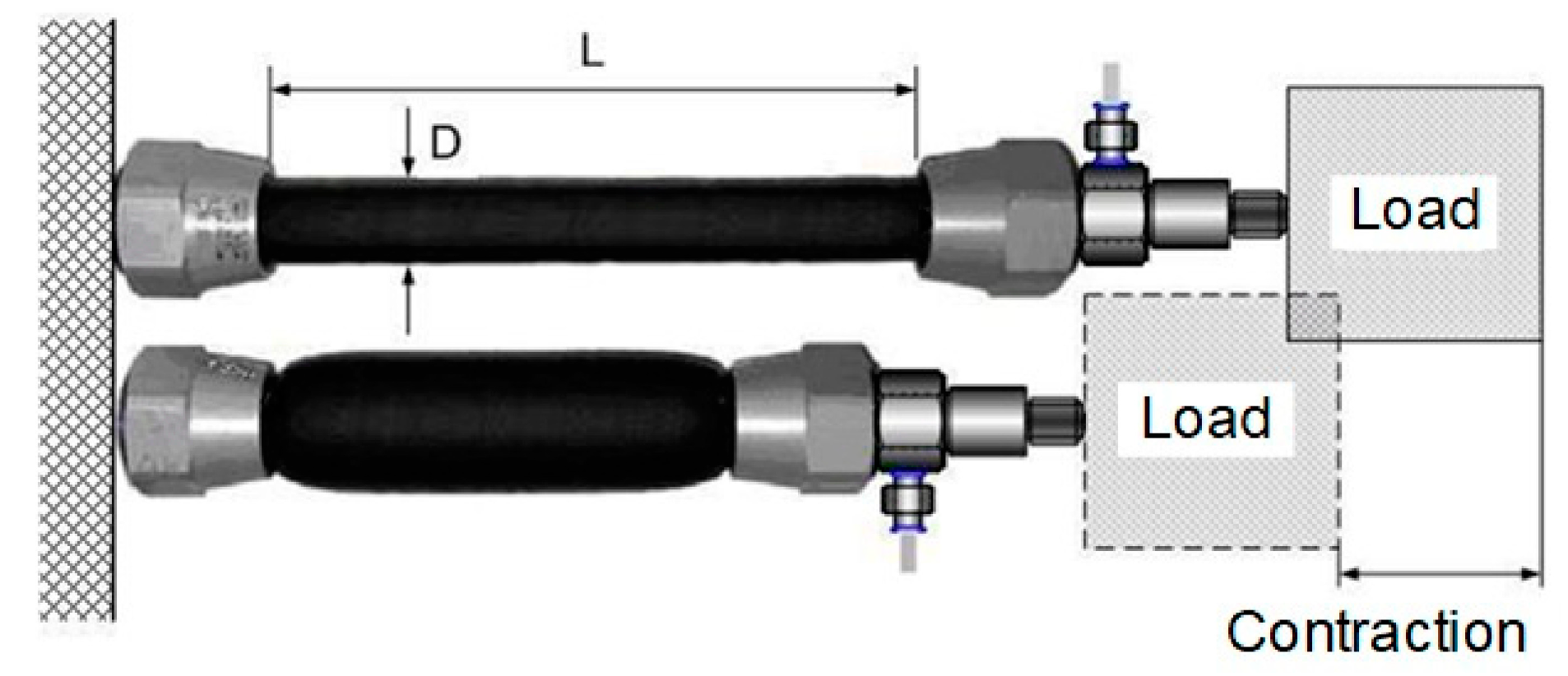
Figure 2.
McKibben actuator design by Yang [19].
Figure 2.
McKibben actuator design by Yang [19].

Figure 3.
Analogues of the technical solution for the human arm: (a) PAM with spring; (b) two PAMs with the same parameters; (c) two PAMs with different parameters [34].
Figure 3.
Analogues of the technical solution for the human arm: (a) PAM with spring; (b) two PAMs with the same parameters; (c) two PAMs with different parameters [34].
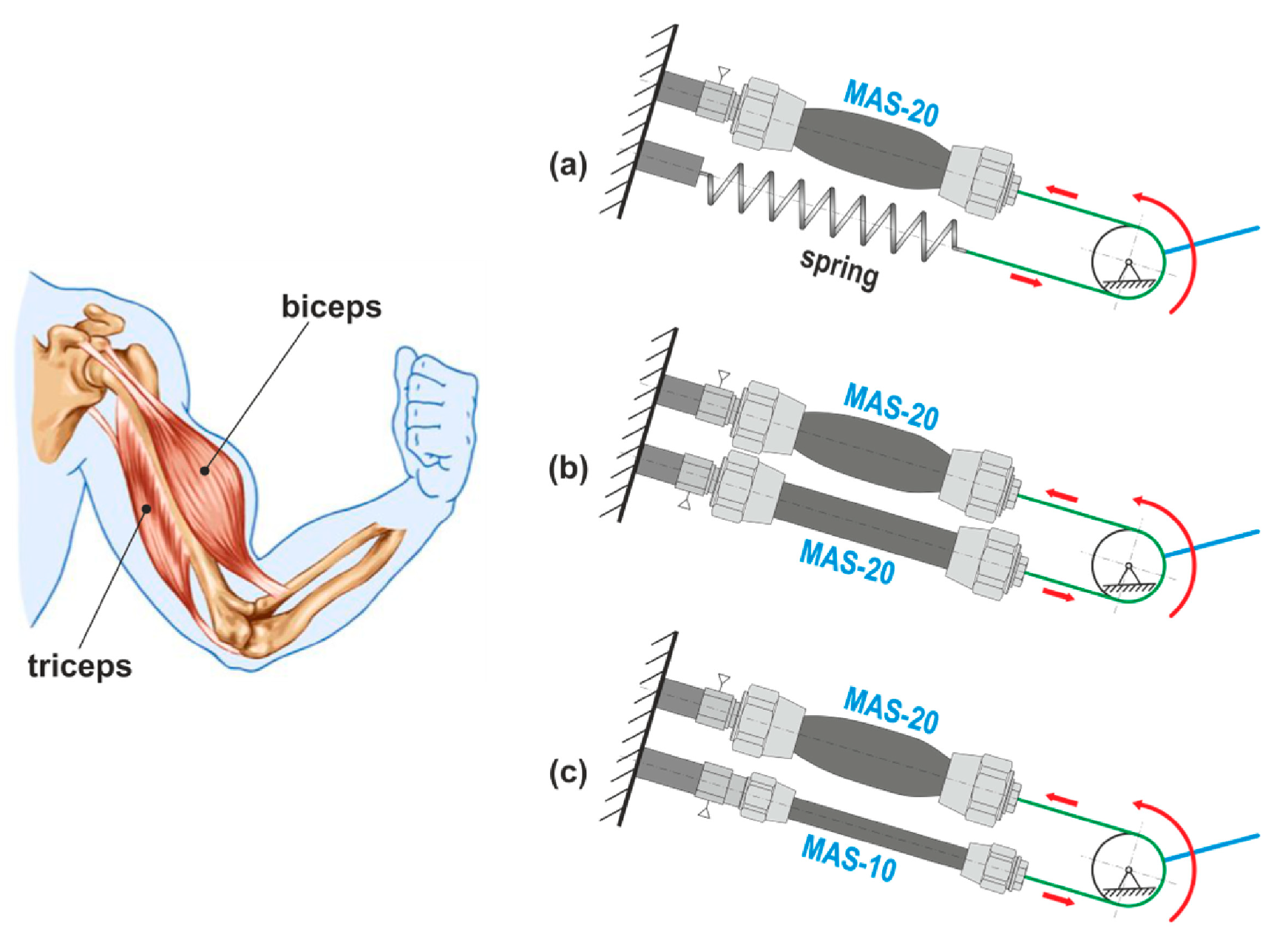
Figure 4.
Octopus-inspired arm prototype by Kang et al. [39].
Figure 4.
Octopus-inspired arm prototype by Kang et al. [39].

Figure 5.
(a) Continuum snake-inspired robot arm by Al-Ibadi et al. [40]; (b) a muscle-driven snake robot by Lopez et al. [41].

Figure 6.
A frog-inspired robot by Fan et al. [42].
Figure 6.
A frog-inspired robot by Fan et al. [42].

Figure 7.
A variety of accordion-pattern OSPAs fabricated from different-diameter heat-shrink tubes by Zaghloul et al. [12].
Figure 7.
A variety of accordion-pattern OSPAs fabricated from different-diameter heat-shrink tubes by Zaghloul et al. [12].

Figure 8.
Design of a hybrid Electric–Pneumatic Actuator [45].
Figure 8.
Design of a hybrid Electric–Pneumatic Actuator [45].

Figure 9.
(a) Inflatable sleeves surrounding skeleton and PAM, suggested by Ohta et al. [46]; (b) a hybrid robot by Sun et al. that can switch between pneumatic muscle and elastic rod [47].
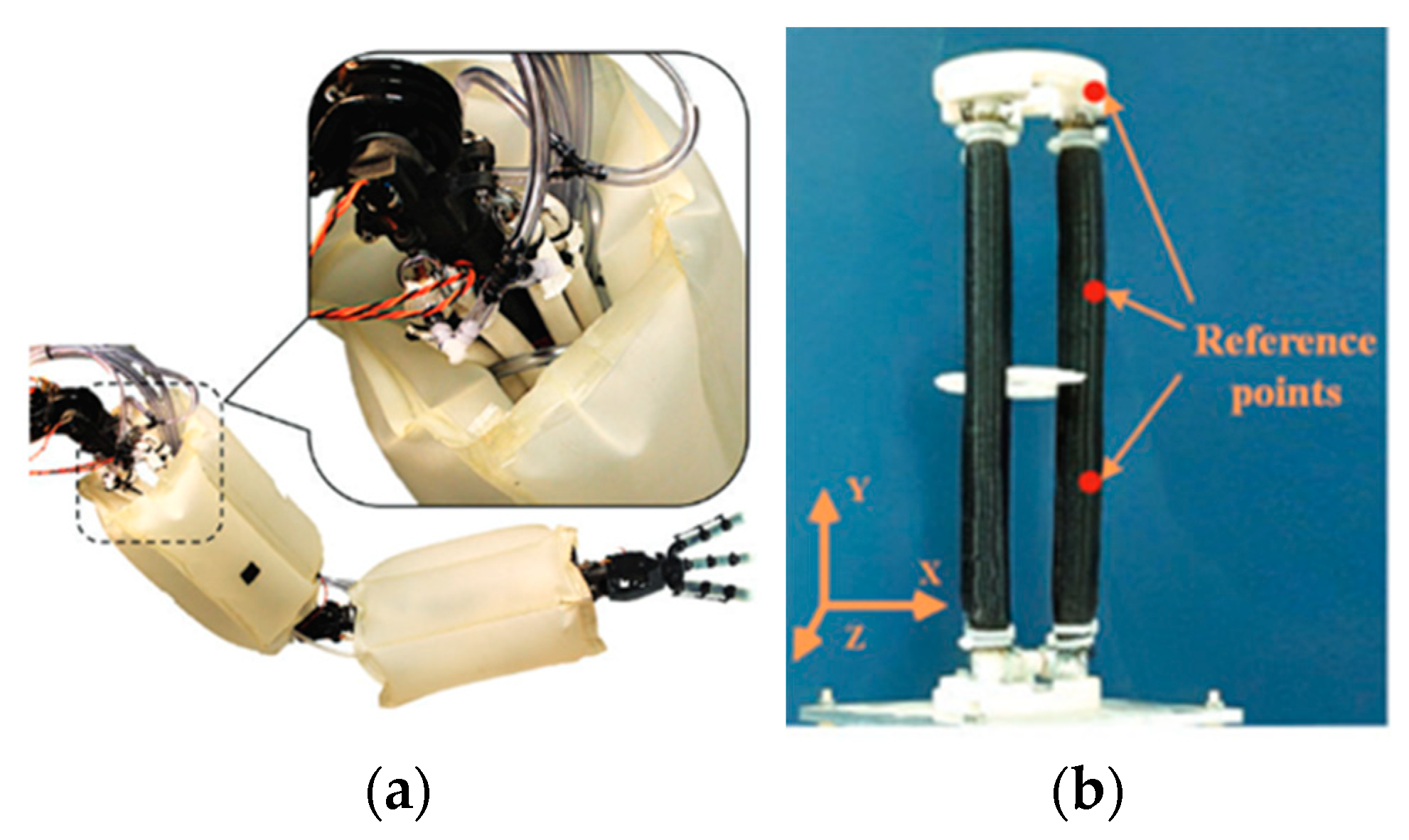
Figure 10.
(a). Musculoskeletal leg and the PAM arrangement; (b) forward kinematics of bionic leg [49].
Figure 10.
(a). Musculoskeletal leg and the PAM arrangement; (b) forward kinematics of bionic leg [49].

Figure 11.
Inverse kinematics solutions along a straight-line trajectory by Zi et al. [58].
Figure 11.
Inverse kinematics solutions along a straight-line trajectory by Zi et al. [58].
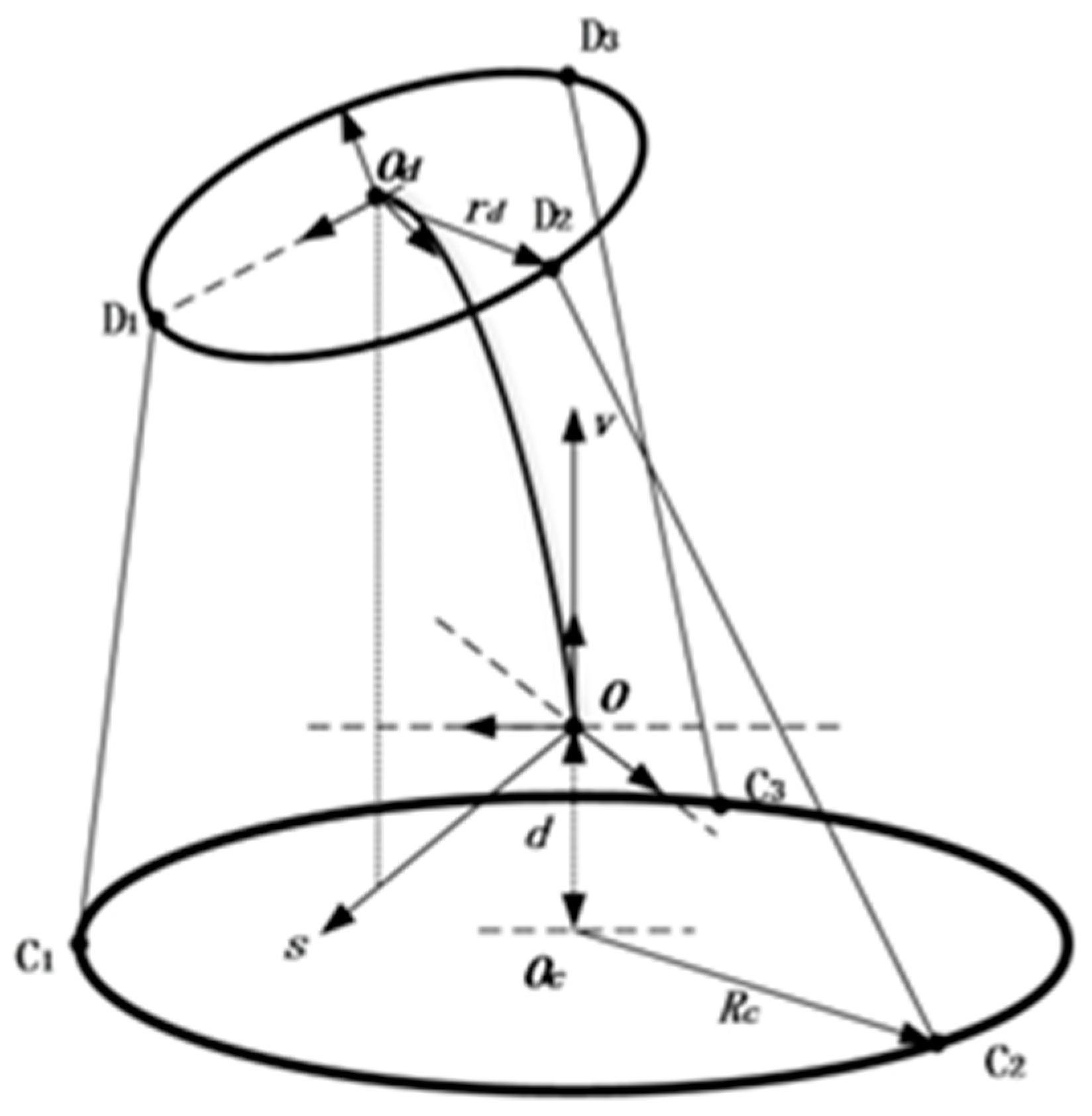
Figure 12.
Model predictive control for a trajectory soft robot using a Koopman operator model by Bruder et al. [84].
Figure 12.
Model predictive control for a trajectory soft robot using a Koopman operator model by Bruder et al. [84].
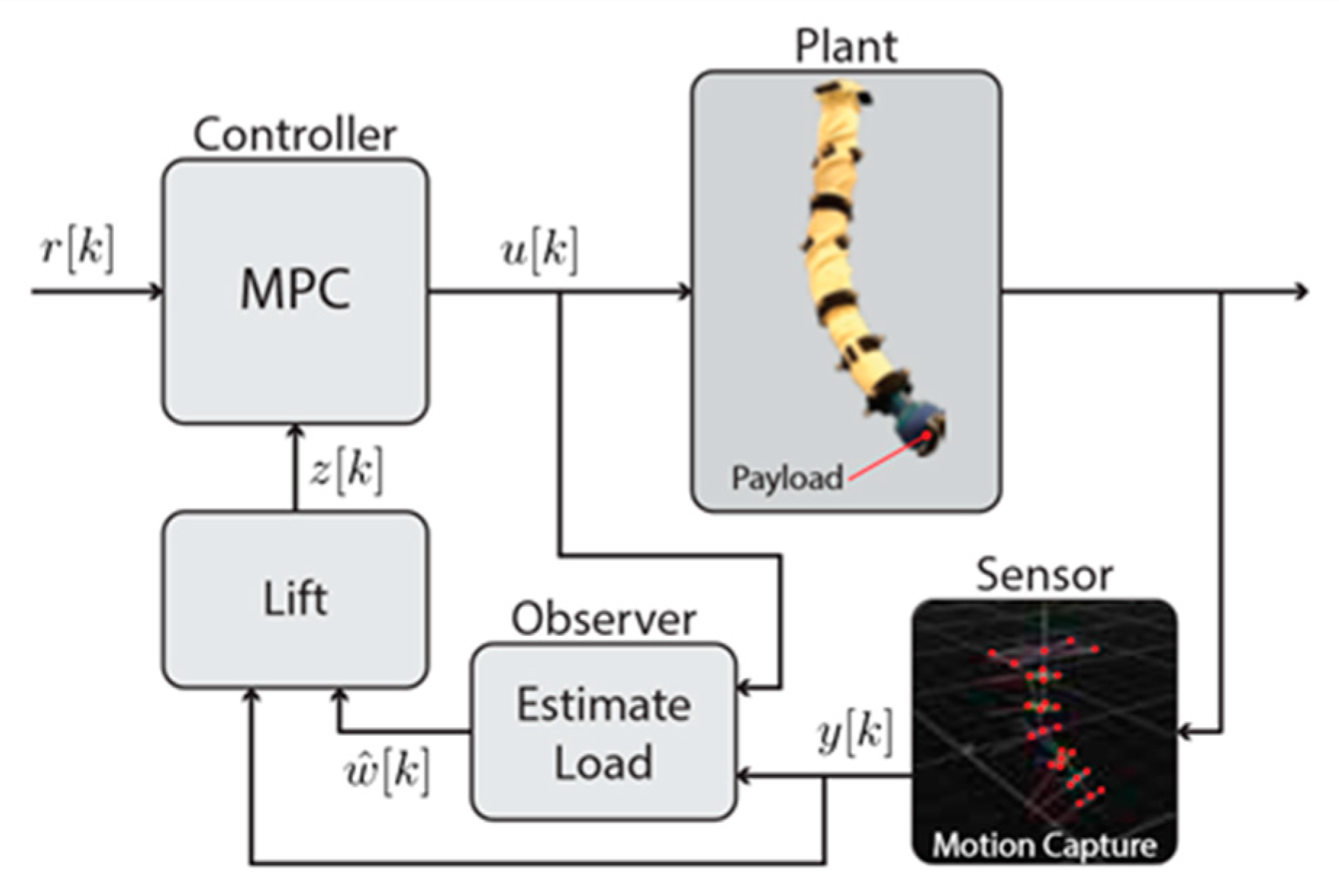
Figure 13.
Model-based control of the nonlinear system in state space by Bruder [85].
Figure 13.
Model-based control of the nonlinear system in state space by Bruder [85].
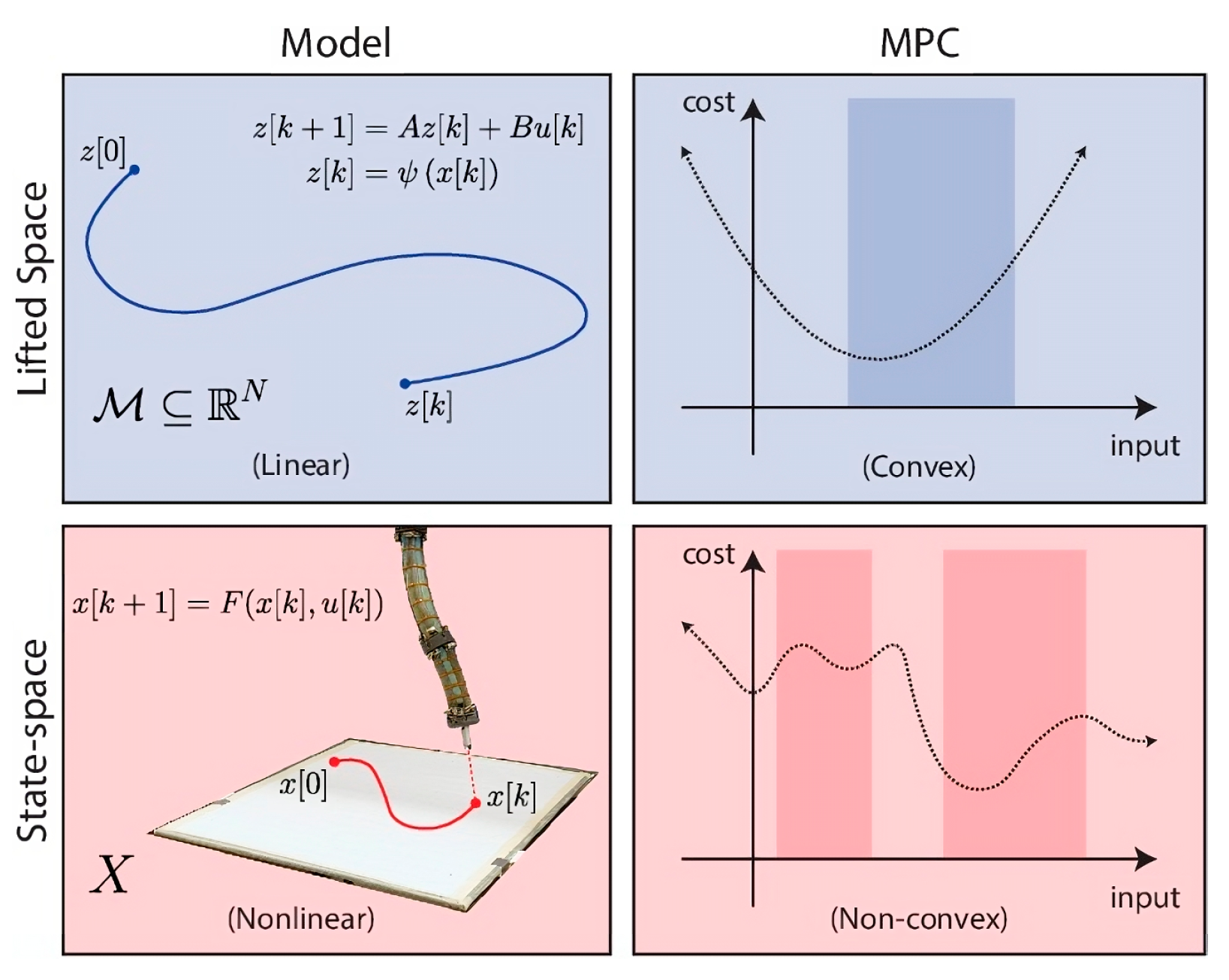
Figure 14.
Simulation the full state of the robots in observer position, by using ChainQueen [108].
Figure 14.
Simulation the full state of the robots in observer position, by using ChainQueen [108].
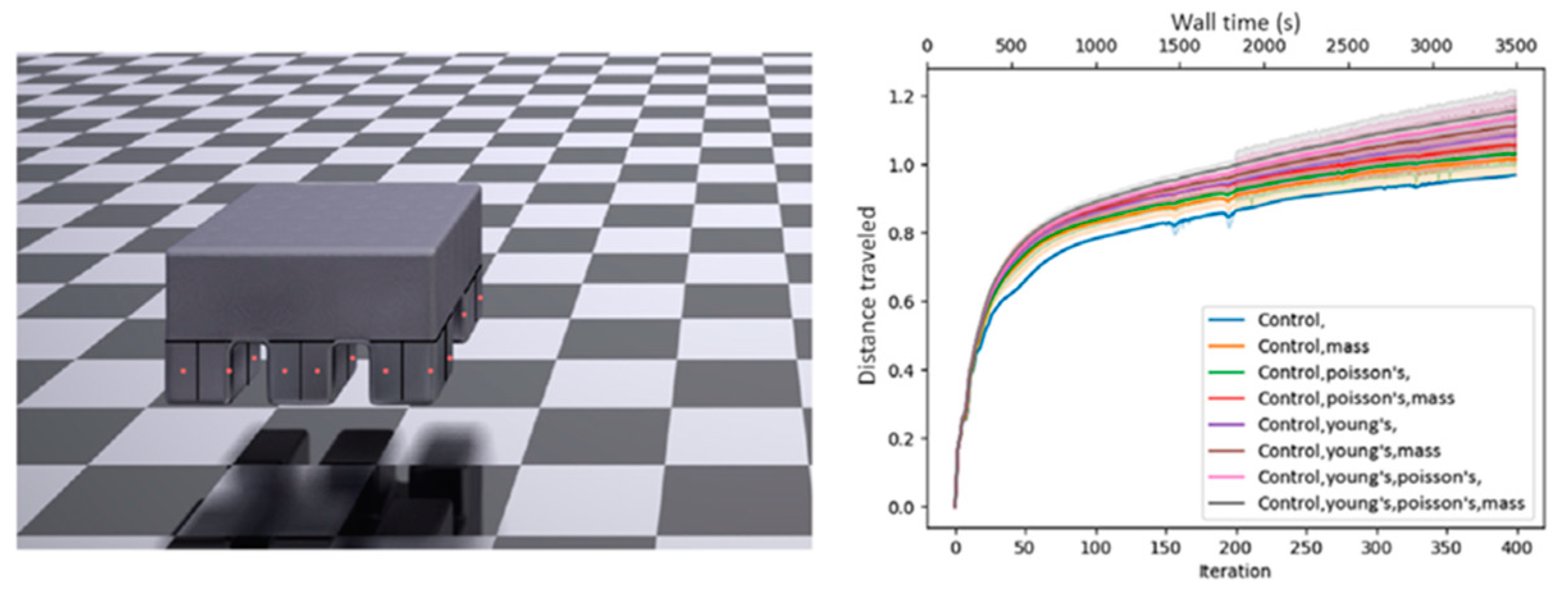
Figure 15.
Simulation of dynamics hybrid robots using SoRoSim [110].
Figure 15.
Simulation of dynamics hybrid robots using SoRoSim [110].
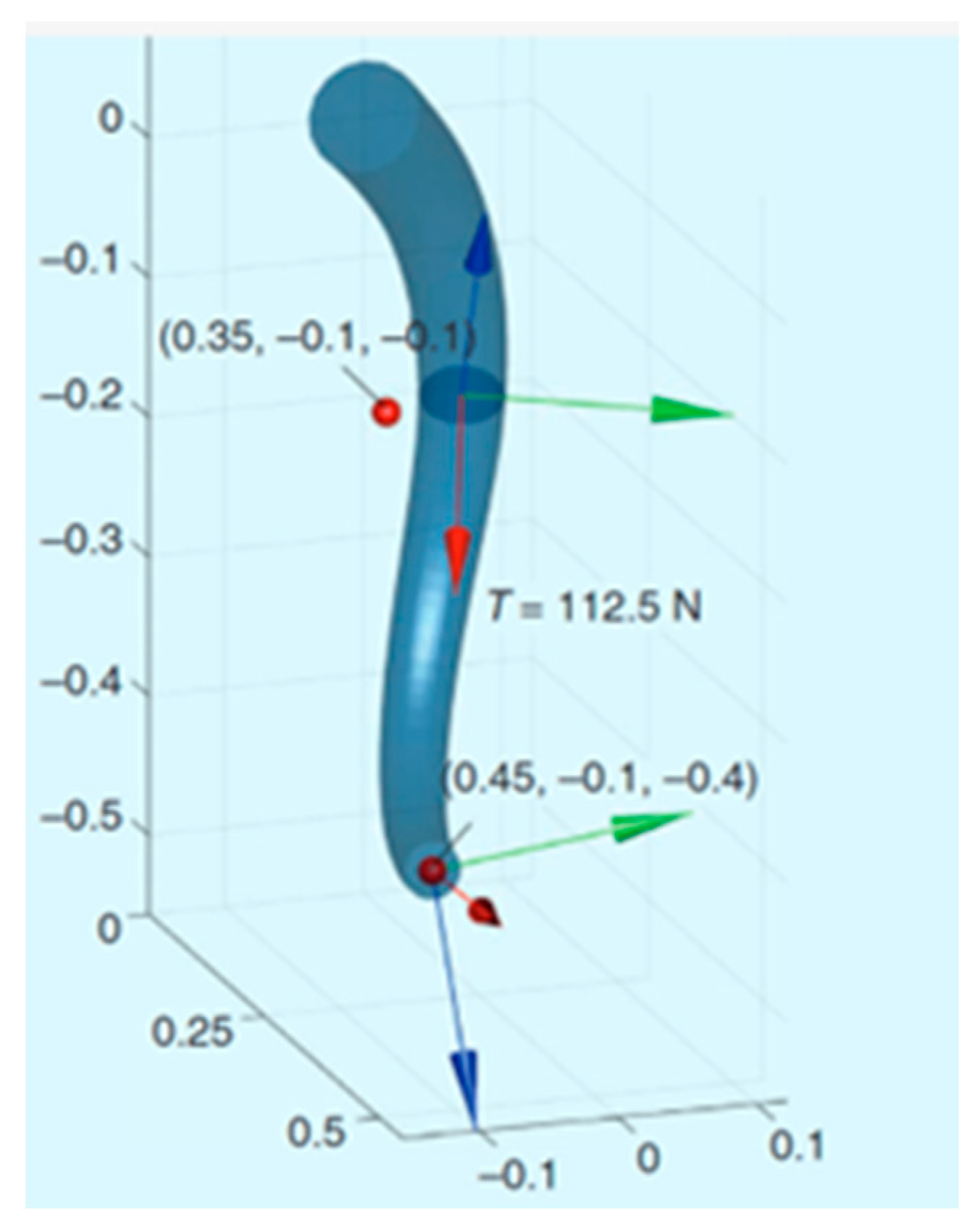
Table 1.
Direction of research for soft robot kinematics.
| Authors | Type of Kinematic | Range of Investigated Pressures/kPa | Type of Manipulator | Number of Chambers | Number of Segments | Object of Study |
|---|---|---|---|---|---|---|
| Lei, et al. [49] | Forward | 0–180 | McKibben pneumatic artificial muscle | 4 | 2 | Stiffness |
| Wang et al. [50] | Forward | 0–35 | Pneumatically driven low-pressure soft actuators (PLSAs) | 3 | 1 | Position, orientation, |
| Al-Ibadi et al. [51] | Forward | 0–500 | Soft extensor continuum arm | 4 | 1 | Length, force, orientation |
| Liu, Z. et al. [52] | Forward | 20–100 | Soft | 3 | 3 | Position |
| Kim, et al. [53] | Forward | 0–30 | Extensor-contractor fabric-based antagonistic actuator | 1 | 1 | Stiffness |
| Peng, Y. et al. [56] | Forward | 15–35 | McKibben pneumatic artificial muscles | 3 | 3 | Position, orientation, forces |
| Kang, et al. [59] | Forward | 60–600 | McKibben pneumatic artificial muscle | 3 | 4 | Position, orientation |
| Godage et al. [61] | Forward, inverse | hydraulic muscle actuators (HMA) | 3 | 3 | Position, orientation | |
| Fernando et al. [65] | Forward, inverse | 0–125 | Reverse Pneumatic Artificial Muscles (RPAMs) | 3 | 1 | Position |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Sokolov, O.; Hošovský, A.; Trojanová, M. Design, Modelling, and Control of Continuum Arms with Pneumatic Artificial Muscles: A Review. Machines 2023, 11, 936. https://doi.org/10.3390/machines11100936
AMA Style
Sokolov O, Hošovský A, Trojanová M. Design, Modelling, and Control of Continuum Arms with Pneumatic Artificial Muscles: A Review. Machines. 2023; 11(10):936. https://doi.org/10.3390/machines11100936
Chicago/Turabian StyleSokolov, Oleksandr, Alexander Hošovský, and Monika Trojanová. 2023. "Design, Modelling, and Control of Continuum Arms with Pneumatic Artificial Muscles: A Review" Machines 11, no. 10: 936. https://doi.org/10.3390/machines11100936
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.