Automatic Fault Diagnostic System for Induction Motors under Transient Regime Optimized with Expert Systems

 , , , , , and
, , , , , and 
Abstract
:1. Introduction
2. Components of the Generator of Expert Systems for Fault Diagnosis of IMs
- The quantity measured in the IM.
- The method used for extracting fault representative features from the measured quantities.
- The type of expert system used to perform the fault diagnosis from the selected IM features.
2.1. Quantities Measured in the IM
2.2. Methods to Obtain Fault Representative Features
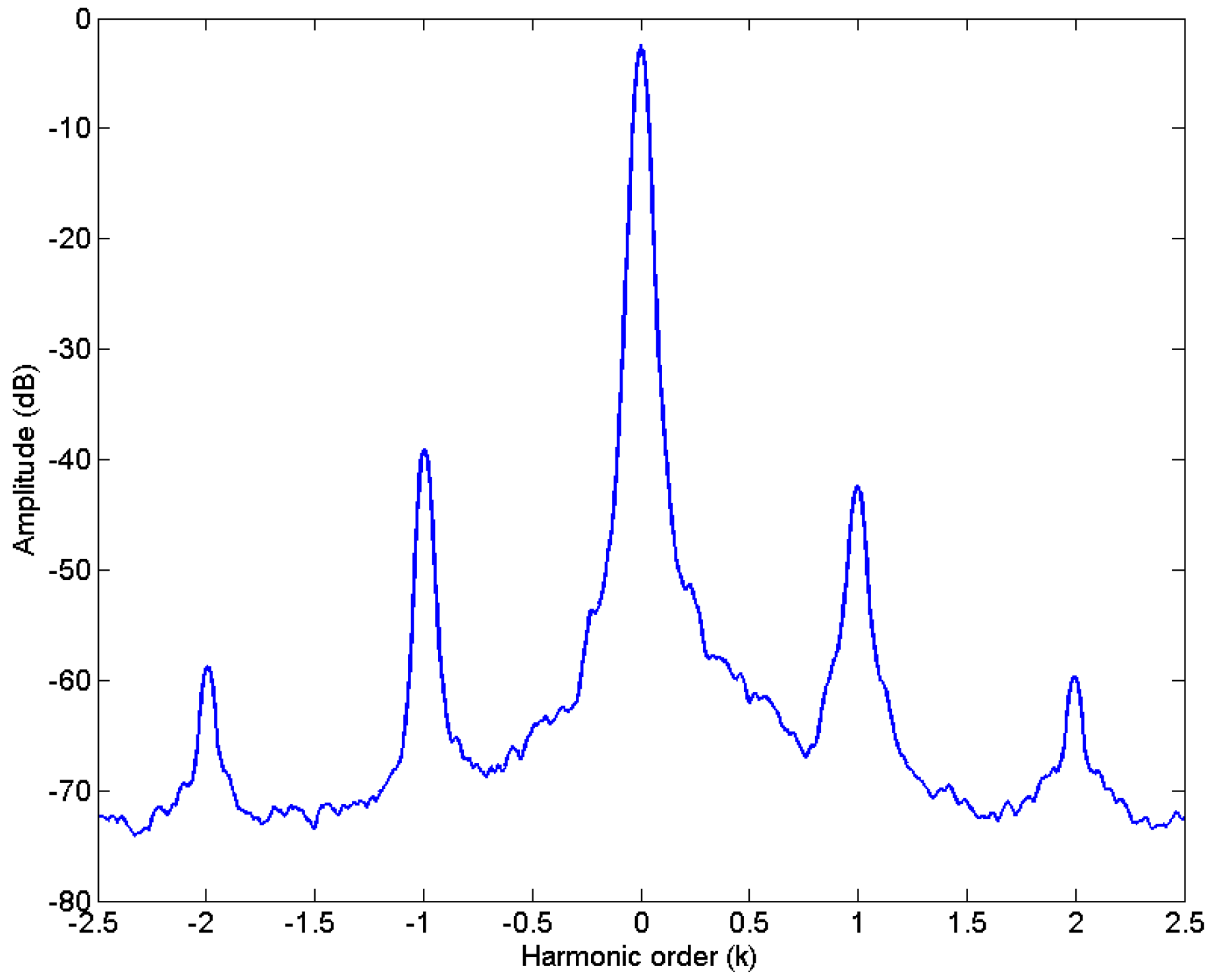
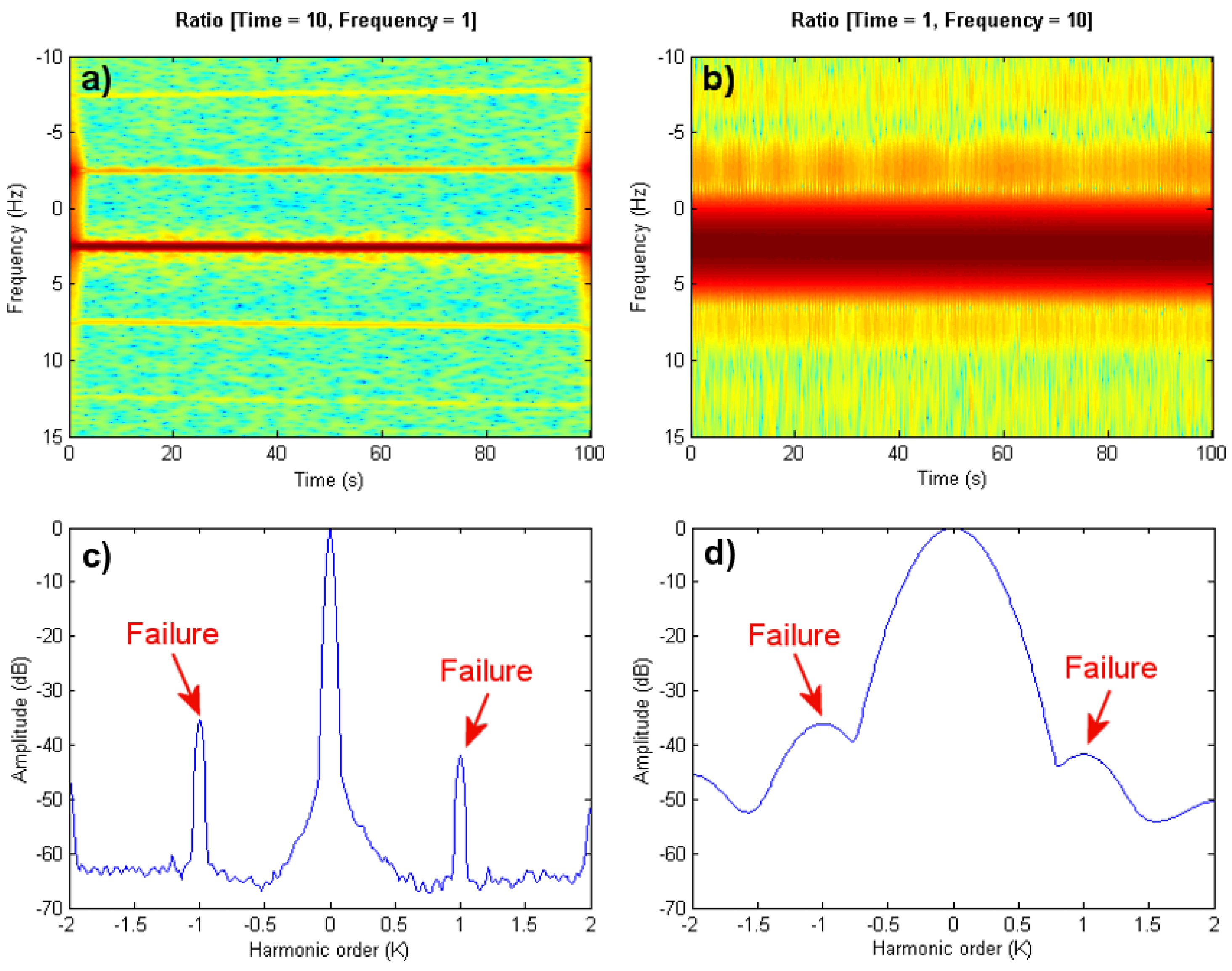
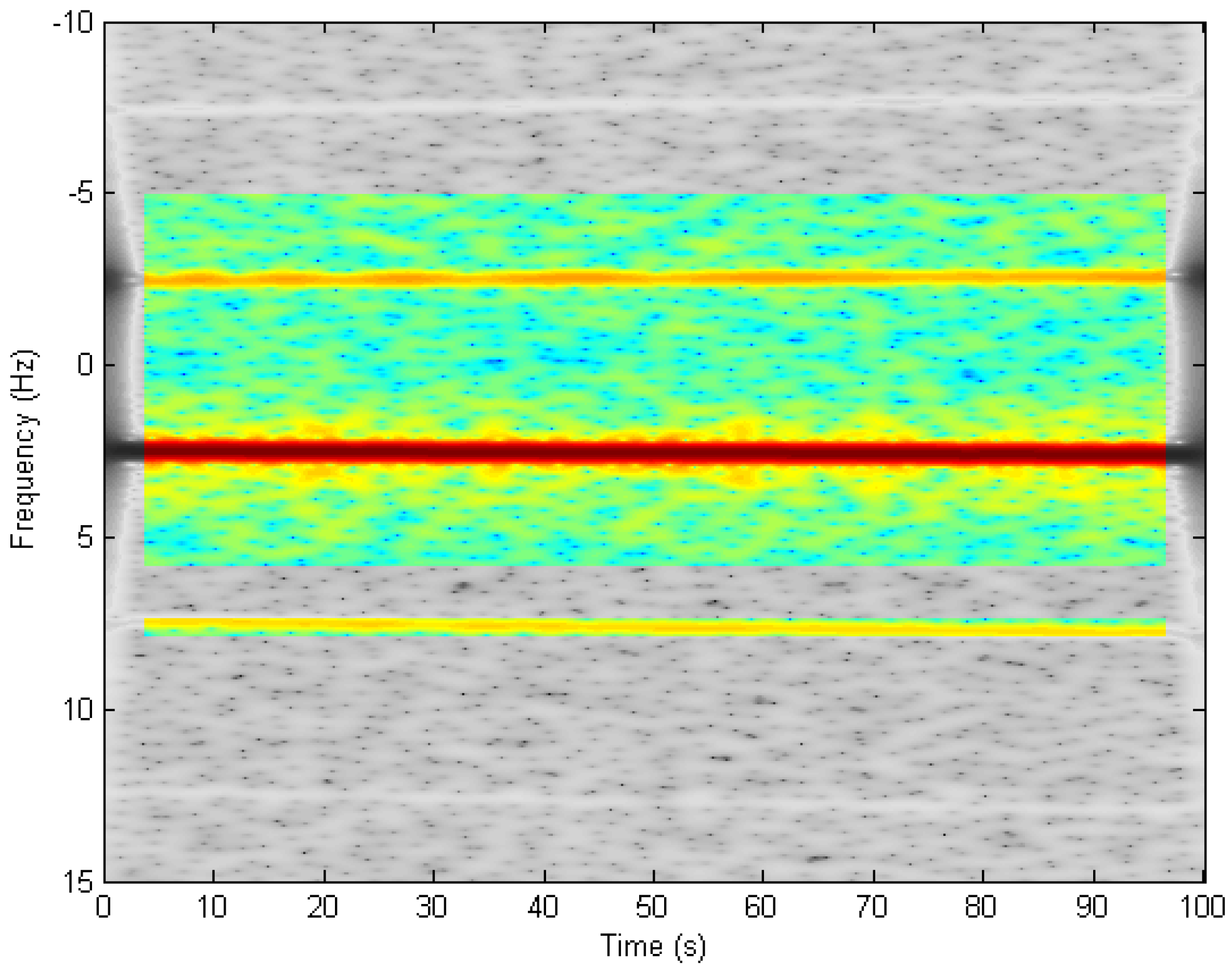
2.3. The Harmonic Order Tracking Analysis (HOTA) Method
3. Expert Systems for Features Classification
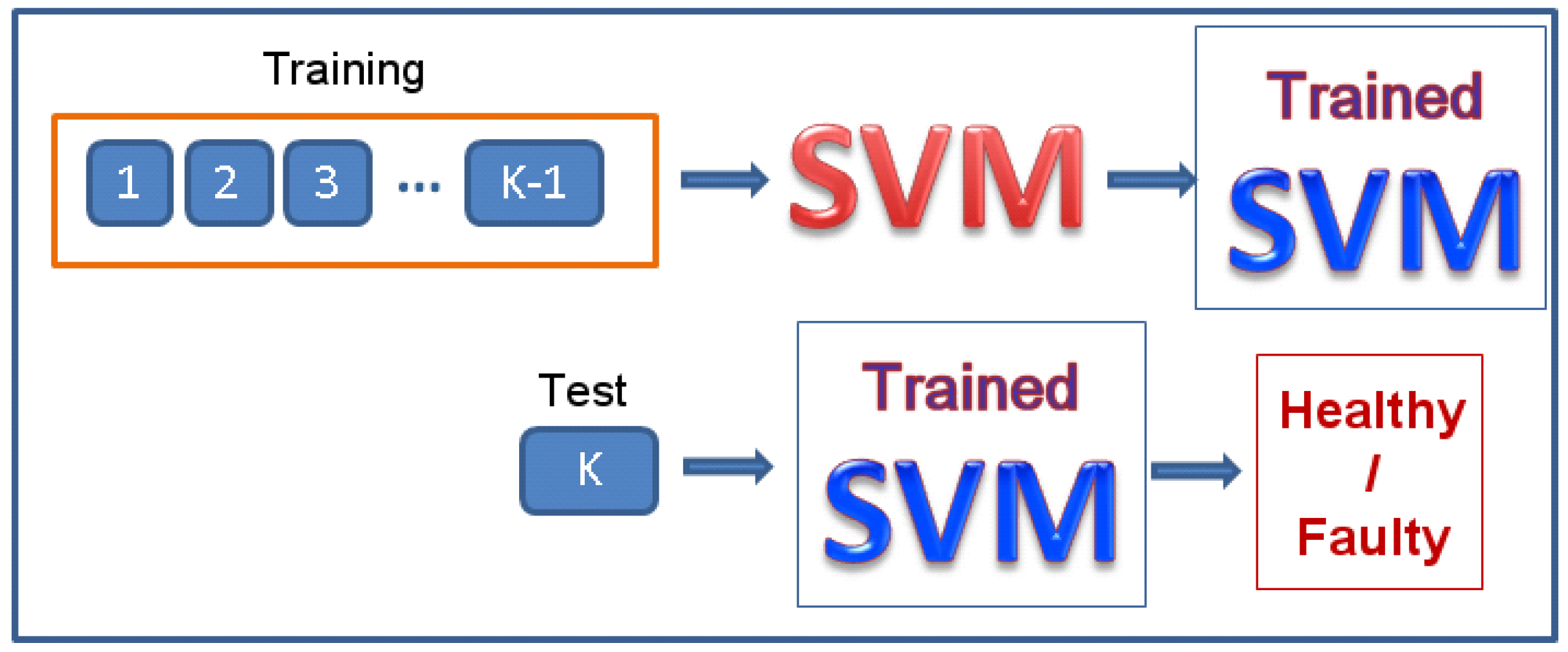
3.1. Support Vector Machine
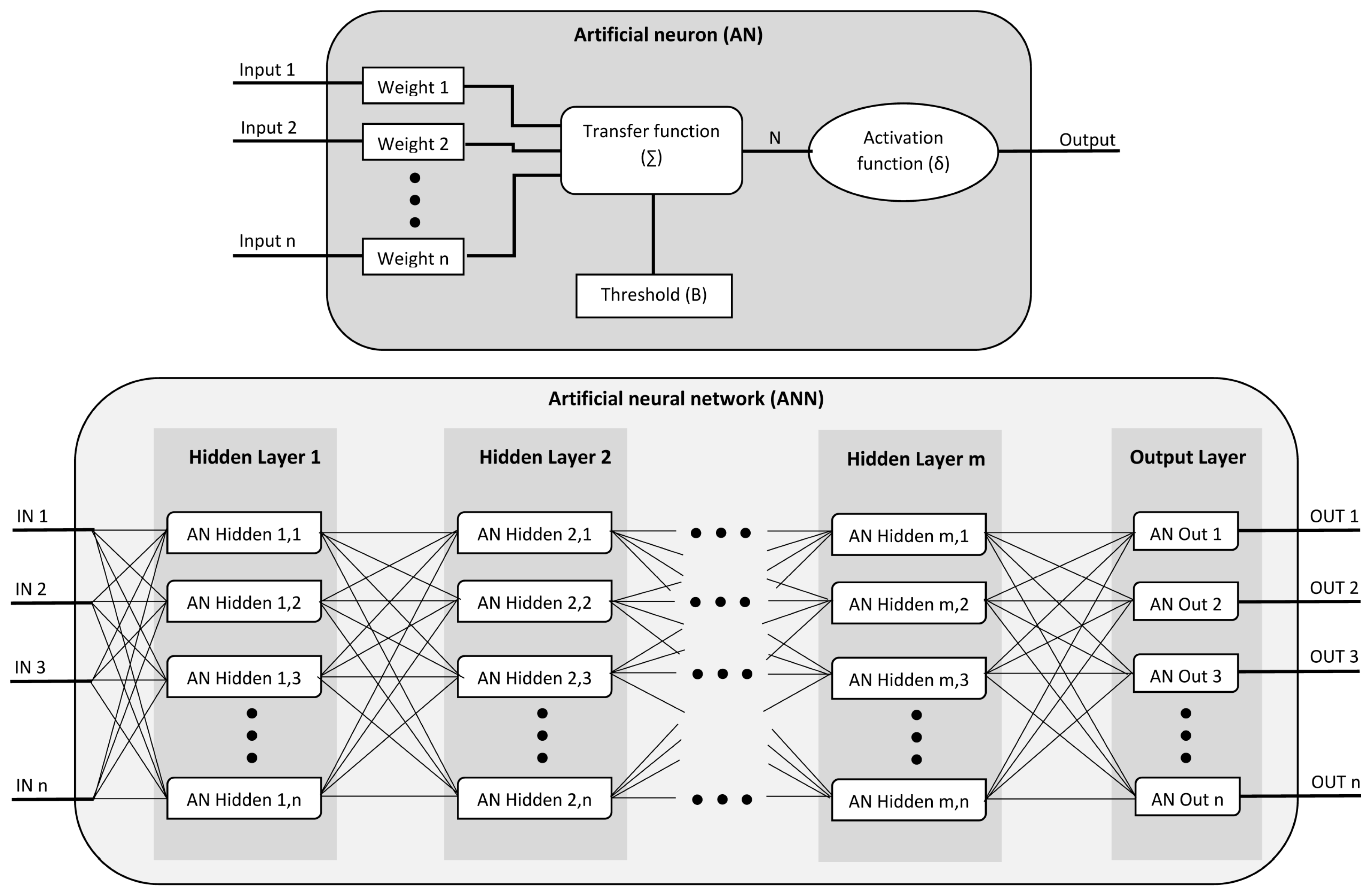
3.2. Artificial Neural Network
4. Development of the Supra-System, a System Able to Generate and Optimize Failure Diagnostic Systems Improved with Expert Systems
4.1. Optimization of HOTA Method for IMs Fault Diagnosis
4.2. Optimization of the Learning Process of the SVM Expert System for IMs Fault Diagnosis
4.3. Optimization of the Learning Process of ANN Expert System for IMs Fault Diagnosis
5. Experimental Validation
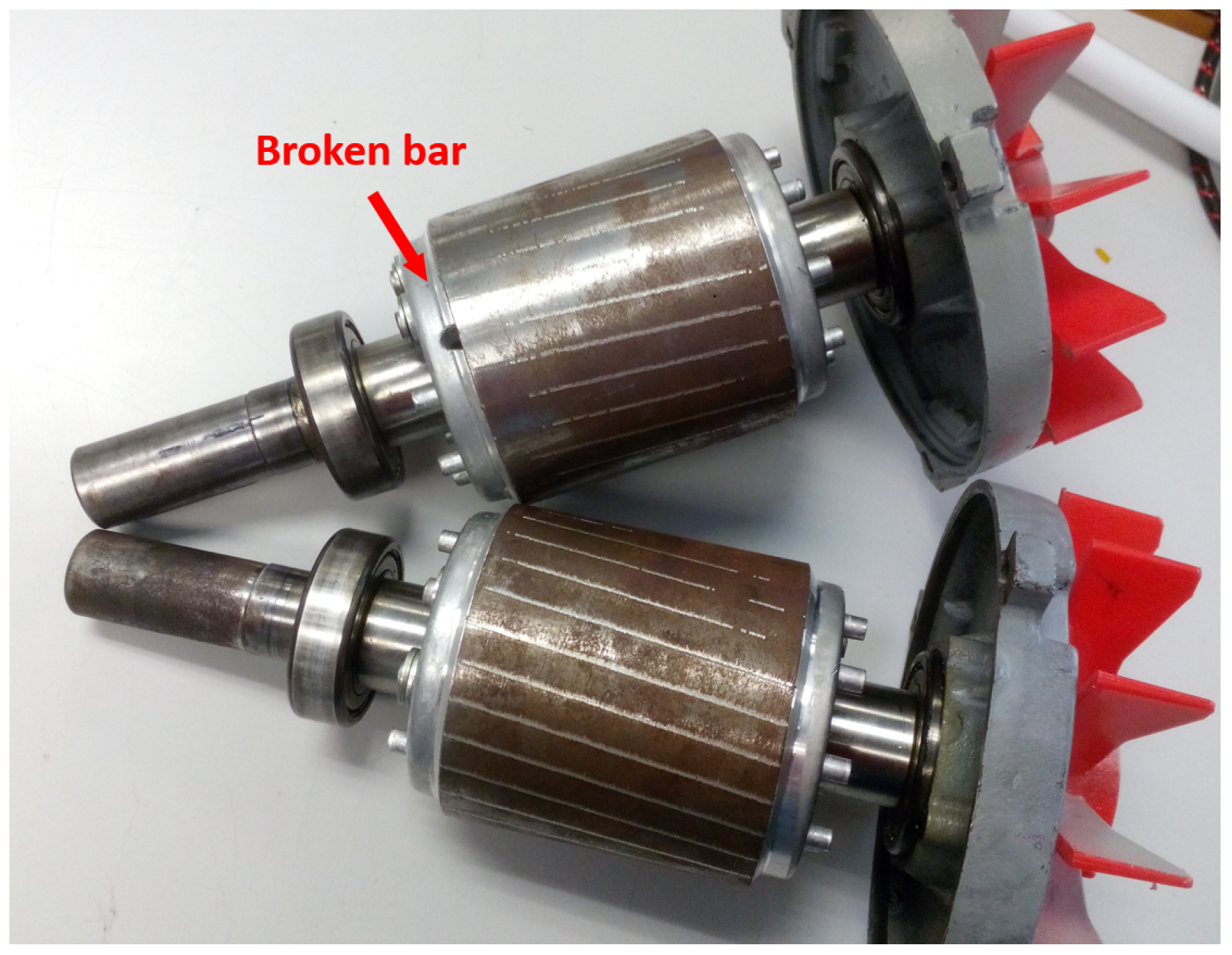
5.1. Test Bed
5.2. Experimental Results
- two HOTA implementations (with STFT or SFFT).
- two SVM expert system variants (with Polynomial or RBF Kernel).
- two ANN expert system variants (one or two hidden layers)
5.3. Time Required by the Supra-System to Generate Locals and Global Optimized IMs Fault Diagnostic Systems
5.4. Hit Rates Obtained by the Expert Systems for IMs Fault Diagnosis Generated by the Supra-System
- In both expert systems the maximum hits ratio has been reached (the optimal diagnostic system).
- None of these local diagnostic system shows over-training. Otherwise it would show a higher hit ratio much closer to 100% and hit ratios values would be more different between local diagnosis systems.
6. Conclusions
- All the diagnostic systems generated are suitable to be used in transient regime operation.
- The generation process is totally automated. That is, starting on the samples input until finishing the generation of optimum diagnostic system no user intervention is required at all.
- The generation process is totally autonomous. That is, it is not necessary to carry out any control or adjustment task on the supra-system for a successful development of the optimum diagnostic system.
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Puche-Panadero, R.; Pineda-Sanchez, M.; Riera-Guasp, M.; Roger-Folch, J.; Hurtado-Perez, E.; Perez-Cruz, J. Improved resolution of the MCSA method via Hilbert transform, enabling the diagnosis of rotor asymmetries at very low slip. IEEE Trans. Energy Convers. 2009, 24, 52–59. [Google Scholar] [CrossRef]
- Abd-el Malek, M.; Abdelsalam, A.K.; Hassan, O.E. Induction motor broken rotor bar fault location detection through envelope analysis of start-up current using Hilbert transform. Mech. Syst. Signal Process. 2017, 93, 332–350. [Google Scholar] [CrossRef]
- Martinez, J.; Belahcen, A.; Muetze, A. Analysis of the vibration magnitude of an induction motor with different numbers of broken bars. IEEE Trans. Ind. Appl. 2017, 53, 2711–2720. [Google Scholar] [CrossRef]
- Sapena-Bano, A.; Pineda-Sanchez, M.; Puche-Panadero, R.; Perez-Cruz, J.; Roger-Folch, J.; Riera-Guasp, M.; Martinez-Roman, J. Harmonic order tracking analysis: A novel method for fault diagnosis in induction machines. IEEE Trans. Energy Convers. 2015, 30, 833–841. [Google Scholar] [CrossRef]
- Sapena-Bano, A.; Burriel-Valencia, J.; Pineda-Sanchez, M.; Puche-Panadero, R.; Riera-Guasp, M. The Harmonic Order Tracking Analysis Method for the Fault Diagnosis in Induction Motors Under Time-Varying Conditions. IEEE Trans. Energy Convers. 2017, 32, 244–256. [Google Scholar] [CrossRef]
- Burriel-Valencia, J.; Puche-Panadero, R.; Martinez-Roman, J.; Sapena-Bano, A.; Pineda-Sanchez, M. Short-Frequency Fourier Transform for Fault Diagnosis of Induction Machines Working in Transient Regime. IEEE Trans. Instrum. Meas. 2017, 66, 432–440. [Google Scholar] [CrossRef] [Green Version]
- Yin, Z.; Hou, J. Recent advances on SVM-based fault diagnosis and process monitoring in complicated industrial processes. Neurocomputing 2016, 174, 643–650. [Google Scholar] [CrossRef]
- Bazan, G.H.; Scalassara, P.R.; Endo, W.; Goedtel, A.; Godoy, W.F.; Palácios, R.H.C. Stator fault analysis of three-phase induction motors using information measures and artificial neural networks. Electr. Power Syst. Res. 2017, 143, 347–356. [Google Scholar] [CrossRef]
- Beale, M.H.; Hagan, M.T.; Demuth, H.B. Neural network toolbox 7. In User’s Guide; MathWorks: Natick, MA, USA, 2010. [Google Scholar]
- Hsu, C.W.; Chang, C.-C.; Lin, C.-J. A Practical Guide to Support Vector Classification; Technical Report; Department of Computer Science, National Taiwan University: Taipei City, Taiwan, 2013. [Google Scholar]
- Bishop, C.M. Neural Networks for Pattern Recognition; Oxford University Press: Oxford, UK, 1995. [Google Scholar]
- Mustafidah, H.; Hartati, S.; Wardoyo, R.; Harjoko, A. Selection of Most Appropriate Backpropagation Training Algorithm in Data Pattern Recognition. Int. J. Comput. Trends Technol. 2014, 2, 92–95. [Google Scholar] [CrossRef]
- Godoy, W.F.; da Silva, I.N.; Goedtel, A.; Palácios, R.H.C.; Lopes, T.D. Application of intelligent tools to detect and classify broken rotor bars in three-phase induction motors fed by an inverter. IET Electr. Power Appl. 2016, 10, 430–439. [Google Scholar] [CrossRef]
- Ghorbanian, V.; Faiz, J. A survey on time and frequency characteristics of induction motors with broken rotor bars in line-start and inverter-fed modes. Mech. Syst. Signal Process. 2015, 54, 427–456. [Google Scholar] [CrossRef]
- Valles-Novo, R.; de Jesus Rangel-Magdaleno, J.; Ramirez-Cortes, J.M.; Peregrina-Barreto, H.; Morales-Caporal, R. Empirical mode decomposition analysis for broken-bar detection on squirrel cage induction motors. IEEE Trans. Instrum. Meas. 2015, 64, 1118–1128. [Google Scholar] [CrossRef]
- Vitor, A.L.; Scalassara, P.R.; Endo, W.; Goedtel, A. Induction motor fault diagnosis using wavelets and coordinate transformations. In Proceedings of the 2016 12th IEEE International Conference on Industry Applications (INDUSCON), Curitiba, Brazil, 20–23 November 2016; pp. 1–8. [Google Scholar]
- De Santiago-Perez, J.J.; Rivera-Guillen, J.R.; Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M.; Romero-Troncoso, R.J.; Dominguez-Gonzalez, A. Fourier transform and image processing for automatic detection of broken rotor bars in induction motors. Meas. Sci. Technol. 2018, 29, 095008. [Google Scholar] [CrossRef]
- Perez-Cruz, J.; Perez-Vazquez, M.; Pineda-Sanchez, M.; Puche-Panadero, R.; Sapena-Bano, A. The Harmonic Order Tracking Analysis (HOTA) for the Diagnosis of Induction Generators Working Under Steady State Regime. In Proceedings of the 2017 Asia-Pacific Engineering and Technology Conference (APETC 2017), Kuala Lumpur, Malaysia, 25–27 May 2017; pp. 1864–1869. [Google Scholar]
- Merabet, H.; Bahi, T.; Drici, D.; Halam, N.; Bedoud, K. Diagnosis of rotor fault using neuro-fuzzy inference system. J. Fundam. Appl. Sci. 2017, 9, 170–182. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Pineda-Sanchez, M.; Pérez-Cruz, J.; Puche-Panadero, R.; Roger-Folch, J.; Antonino-Daviu, J.A. Diagnosis of induction motor faults via Gabor analysis of the current in transient regime. IEEE Trans. Instrum. Measur. 2012, 61, 1583–1596. [Google Scholar] [CrossRef]
- Gambhir, A.; Vijarania, M.; Gupta, S. Implementation and Application of Binary Search in 2-D Array. Int. J. Inst. Ind. Res. 2016, 1, 30–31. [Google Scholar]
- Gyftakis, K.N.; Cardoso, A.J.M.; Antonino-Daviu, J.A. Introducing the Filtered Park’s and Filtered Extended Park’s Vector Approach to detect broken rotor bars in induction motors independently from the rotor slots number. Mech. Syst. Signal Process. 2017, 93, 30–50. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer Type | Transfer Function | In(i)/Out(o) Tie |
|---|---|---|
| Hidden Layer | Hyperbolic Tangent Sigmoid | |
| Output Layer | Competitive Softmax | , n max |
| , the others |
| Regime | Supply | Load | Tests | |
|---|---|---|---|---|
| Steady | DOL | 50 Hz | Constant | 12 |
| VSD | 25 Hz | Constant | 24 | |
| 50 Hz | Constant | 24 | ||
| Transient | DOL | 50 Hz | Pulse | 8 |
| Ramps | 11 | |||
| VSD | 25 Hz | Pulse | 15 | |
| Ramps | 19 | |||
| 50 Hz | Pulse | 15 | ||
| Ramps | 19 | |||
| Ramps | Constant | 60 | ||
| Pulse | 33 | |||
| Ramps | 12 | |||
| Optimization Time (hours) | HOTA + STFT | HOTA + SFFT |
|---|---|---|
| SVM with Polynomial Kernel | 13.81 | 2.70 |
| SVM with RBF Kernel | 12.57 | 1.83 |
| ANN with 1 hidden layer | 13.58 | 3.03 |
| ANN with 2 hidden layers | 34.02 | 20.16 |
| Classification Time (seconds) | HOTA + STFT | HOTA + SFFT |
|---|---|---|
| SVM with Polynomial Kernel | 36.64 | 5.60 |
| SVM with RBF Kernel | 36.64 | 5.60 |
| ANN with 1 hidden layer | 36.65 | 5.60 |
| ANN with 2 hidden layers | 36.65 | 5.60 |
| Hit Rate (%) | HOTA + STFT | HOTA + SFFT |
|---|---|---|
| SVM with Polynomial Kernel | 98.62 | 98.89 |
| SVM with RBF Kernel | 97.24 | 97.38 |
| ANN with 1 hidden layer | 97.10 | 97.38 |
| ANN with 2 hidden layers | 98.89 | 98.89 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Burriel-Valencia, J.; Puche-Panadero, R.; Martinez-Roman, J.; Sapena-Bano, A.; Pineda-Sanchez, M.; Perez-Cruz, J.; Riera-Guasp, M. Automatic Fault Diagnostic System for Induction Motors under Transient Regime Optimized with Expert Systems. Electronics 2019, 8, 6. https://doi.org/10.3390/electronics8010006
Burriel-Valencia J, Puche-Panadero R, Martinez-Roman J, Sapena-Bano A, Pineda-Sanchez M, Perez-Cruz J, Riera-Guasp M. Automatic Fault Diagnostic System for Induction Motors under Transient Regime Optimized with Expert Systems. Electronics. 2019; 8(1):6. https://doi.org/10.3390/electronics8010006
Chicago/Turabian StyleBurriel-Valencia, Jordi, Ruben Puche-Panadero, Javier Martinez-Roman, Angel Sapena-Bano, Manuel Pineda-Sanchez, Juan Perez-Cruz, and Martin Riera-Guasp. 2019. "Automatic Fault Diagnostic System for Induction Motors under Transient Regime Optimized with Expert Systems" Electronics 8, no. 1: 6. https://doi.org/10.3390/electronics8010006