
Robust ISAC Localization in Smart Cities: A Hybrid Network Approach for NLOS Challenges with Uncertain Parameters



1
Department of Computer Science, Faculty of Science, Northern Border University, Arar 73222, Saudi Arabia
2
Department of Electrical and Communication Engineering, College of Engineering, United Arab Emirates University, Al-Ain 15551, United Arab Emirates
*
Author to whom correspondence should be addressed.
J. Sens. Actuator Netw. 2024, 13(1), 2; https://doi.org/10.3390/jsan13010002
Submission received: 12 November 2023
/
Revised: 24 December 2023
/
Accepted: 27 December 2023
/
Published: 29 December 2023
Abstract
:Accurate localization holds paramount importance across many applications within the context of smart cities, particularly in vehicular communication systems, the Internet of Things, and Integrated Sensing and Communication (ISAC) technologies. Nonetheless, achieving precise localization remains a persistent challenge, primarily attributed to the prevalence of non-line-of-sight (NLOS) conditions and the presence of uncertainties surrounding key wireless transmission parameters. This paper presents a comprehensive framework tailored to address the intricate task of localizing multiple nodes within ISAC systems significantly impacted by pervasive NLOS conditions and the ambiguity of transmission parameters. The proposed methodology integrates received signal strength (RSS) and time-of-arrival (TOA) measurements as a strategic response to effectively overcome these substantial challenges, even in situations where the precise values of transmitting power and temporal information remain elusive. An approximation approach is judiciously employed to facilitate the inherent non-convex and NP-hard nature of the original estimation problem, resulting in a notable transformation, rendering the problem amenable to a convex optimization paradigm. The comprehensive array of simulations conducted within this study corroborates the efficacy of the proposed hybrid cooperative localization method by underscoring its superior performance relative to conventional approaches relying solely on RSS or TOA measurements. This enhancement in localization accuracy in ISAC systems holds promise in the intricate urban landscape of smart cities, offering substantial contributions to infrastructure optimization and service efficiency.
1. Introduction
Smart cities represent urban environments where the integration of information and communication technologies is harnessed to optimize infrastructure, services, and the overall quality of life for residents [1,2,3]. These cities leverage interconnected systems and data analytics to effectively manage resources, bolster sustainability, and enhance the delivery of public services. Deploying smart technologies, including Internet of Things (IoT) devices, sensors, and data-driven platforms, facilitates real-time monitoring and analysis, enabling well-informed decision-making across transportation, energy consumption, waste management, and public safety [4].
In the realm of smart cities, ISAC technologies play a pivotal role in their evolution and development [5]. These interconnected systems lay the foundation for a dynamic infrastructure that facilitates the collection, analysis, and utilization of vast datasets, ultimately driving efficiency, sustainability, and an enhanced quality of life. Smart cities harness a diverse array of sensors dispersed throughout urban environments. These sensors include but are not limited to, IoT devices, cameras, environmental sensors, and various data collection points [6,7]. Their collective purpose is to acquire real-time data on a broad spectrum of urban dynamics, ranging from traffic patterns and energy consumption to waste management and air quality. Furthermore, environmental sensors interconnected through communication networks enable the continuous monitoring of pollution levels, thus enabling rapid responses to environmental concerns [8]. Recently, in [9], the authors proposed a novel synergetic neural network-based algorithm for secure digital image watermarking in smart cities. This algorithm efficiently processes gray watermark images and embeds them into the block Discrete Cosine Transform (DCT) component. Shifting the focus to the challenges posed by the IoT in smart cities, the authors in [10] addressed the conflicts arising from diverse user preferences by using the linked open data (LOD)-driven approach that optimally leverages inhabitants’ profiles and service attributes, effectively resolving conflicts and ensuring consistency in smart localization applications. By harmoniously integrating sensing and communication, smart cities cultivate an ecosystem where data from various sensors is transmitted, analyzed, and acted upon. This, in turn, leads to more informed decision-making and optimized resource allocation, driving progress and improved urban living. Figure 1 provides an overview of the Location-based services in ISAC-assisted smart cities.
ISAC technology facilitates the simultaneous execution of sensing and user communication tasks, optimizing the utilization of scarce resources and enhancing the efficiency of both sensing and communication services. Moreover, the symbiotic relationship between sensing and communication yields substantial coordination advantages, ultimately culminating in an elevation of overall system performance [11]. Consequently, ISAC is poised to assume a central role in forthcoming applications, notably the domains of the IoT, intelligent transportation systems, and the realization of smart cities. It is worth highlighting that conventional communication systems predominantly rely on Quality of Service (QoS) metrics to gauge user communication requisites, often neglecting the imperative aspect of sensing and localization needs [12].
However, various application scenarios exhibit distinct levels of communication and localization accuracy prerequisites [13]. For instance, scenarios involving critical or hazardous targets, like pedestrians, necessitate a high degree of localization accuracy. In contrast, systems dealing with static or inanimate objects may be adequately served with lower accuracy levels [14,15]. Consequently, the Base Station (BS) can judiciously allocate available resources following the specific Sensing and Communication (S&C) requirements, thereby augmenting the versatility and capacity of ISAC systems. In this context, localization has evolved into an indispensable element of ISAC systems, garnering substantial attention lately due to its extensive range of applications. Hence, localization has taken on a pivotal role within ISAC systems, receiving significant attention due to its wide array of practical applications [16,17,18]. For instance, UAVs with various sensors, such as cameras, LiDAR, and environmental sensors, offer unprecedented data collection and monitoring opportunities in hard-to-reach or hazardous environments. By leveraging the capabilities of ISAC, next-generation communication systems can efficiently relay the collected data to ground stations or users, enabling real-time decision-making and enhancing the overall efficiency of the networks [19].
Nevertheless, accurate localization within ISAC systems, notably in smart cities’ intricate urban settings, poses substantial challenges that hinder localization efforts. Smart cities, with their dense infrastructure and dynamic environments, complicate precise location determination due to NLOS conditions and uncertain transmission parameters. NLOS conditions stem from structures like buildings and vehicles, causing signal disruptions such as blockages, reflections, and multiple signal paths [20]. These complexities weaken signals and introduce extra complexity to the ranging, leading to localization inaccuracies. Moreover, uncertainties in transmission parameters—such as signal strength variations, interference from other wireless devices, and unpredictable environmental shifts—further exacerbate these challenges [21]. Current literature highlights the shortcomings of existing approaches in addressing these intricacies in smart city environments. Recognizing the criticality of NLOS conditions and uncertain parameters is vital, as localization inaccuracies can significantly impact smart city applications like emergency services, traffic management, and infrastructure monitoring [22]. To address these challenges, this paper introduces a novel ISAC-based methodology aiming to significantly enhance the precision and reliability of localization in smart cities. We develop a hybrid approach integrating received signal strength (RSS) and time of arrival (TOA) measurements to tackle smart city localization challenges. By leveraging the strengths of both methods, we enhance accuracy and robustness, especially in scenarios with NLOS conditions and uncertain parameters. This hybrid approach is particularly beneficial for reliable and precise localization in smart city applications, overcoming obstacles like signal disruptions from urban structures. This approach represents a substantial advancement in addressing the complexities of accurate localization within smart city environments.
Localization within ISAC-based smart cities can be achieved through various ranging techniques, including the angle of arrival (AOA), TOA, time difference of arrival (TDOA), and RSS methods [23,24,25]. Among these, the RSS-based approach has been considered the most popular ranging technique based on its cost-effectiveness and ease of implementation. It primarily relies on the signal strength measurement at the receiver’s end. However, the accuracy of RSS-based localization schemes is susceptible to various factors, leading to biased measurement models. These errors in RSS measurements primarily encompass random errors and systematic biases [26,27,28]. Numerous RSS-based localization techniques are documented in the literature in greater detail. For instance, the maximum likelihood (ML) approach can theoretically approach an optimal solution, but it is non-convex, making it challenging to attain a globally optimal solution. To overcome this limitation, optimization-based methods such as second-order cone programming (SOC) and semidefinite programming (SDP) are commonly employed [29]. These techniques are convex and ensure the achievement of a globally optimal solution. Additionally, they often offer superior accuracy compared to linear least squares (LS) methods. It’s important to note that the methods mentioned above are designed for bias-free models. In cases where the RSS measurements exhibit biases, these methods may no longer be applicable. Moreover, Hybrid localization methodologies, which integrate diverse measurements, have garnered substantial attention in recent years due to their capacity to enhance localization accuracy [30]. Literature demonstrated that amalgamating RSS and TOA measurements leads to more precise localization than conventional approaches relying solely on RSS or TOA measurements. Particularly, investigations discussed in [31] have underscored the benefits of combining range-based measurements, where RSS is better suited for short-range applications while TOA is preferred for longer distances. Furthermore, multiple studies have confirmed that hybrid localization algorithms outperform their traditional counterparts, even in challenging scenarios, such as situations with unknown transmission parameters and NLOS conditions [32]. The proposed framework integrates RSS measurements with TOA, utilizing signal strength and timing information. The hybrid RSS and TOA are pivotal for enhancing localization accuracy; RSS excels in scenarios with signal blockages and reflections, while TOA enables accurate distance estimation. By fusing these measurements in a hybrid approach, our framework maximizes their complementary strengths, ensuring robust and accurate localization, especially in smart city contexts characterized by NLOS conditions and uncertain parameters. Ensuring robust, reliable, and accurate localization in smart city ecosystems is crucial. The continual evolution and refinement of localization techniques within ISAC systems promise to play a pivotal role in creating more intelligent, efficient, and safer urban environments.
Integrating cooperative and hybrid radio measurements presents a promising avenue for achieving resilient and precise localization, particularly in scenarios characterized by NLOS effects and uncertain transmission parameters in ISAC systems. This amalgamation of techniques bears significant implications, enhancing the accuracy of blind node (BN) positioning and optimizing network resource allocation. By diminishing reliance on external infrastructure and leveraging the capabilities of neighboring nodes, networks can operate with better efficiency, conserving energy, minimizing communication overhead, and maximizing the utilization of available bandwidth [33]. Despite the promising advantages, a detailed performance evaluation of the cooperative localization, combined with hybrid radio measurements in challenging conditions, remains an underexplored area in ISAC systems. This paper is dedicated to investigating the challenge of achieving precise and robust localization for multiple source nodes by harnessing both cooperative and hybrid measurements in an NLOS environment, where obstacles hinder direct signal paths and transmission parameters are fraught with uncertainty. The fundamental step-wise contributions involved in this study are summarized as:
- First, we present a novel BN localization technique within ISAC systems. This innovative approach leverages cooperative RSS and TOA measurements to achieve accurate localization, particularly when confronting the challenges of an obscured NLOS propagation environment and uncertain transmission parameters.
- Then, we introduce an innovative approach that transforms the original location estimation problem into an equivalent one centered on worst-case estimation errors through parameter estimation, followed by applying convex relaxation techniques to obtain an accurate solution. Conventionally, tackling the joint estimation problem encompassing source location, NLOS biases, and unknown transmission parameters poses a complex and non-convex challenge that frequently surpasses the capabilities of conventional search algorithms.
- Lastly, through numerical simulations, we evaluated the superior performance of our proposed cooperative localization technique, which harnesses hybrid RSS-TOA measurements. This performance comparison is conducted against contemporary state-of-the-art techniques.
The remainder of this paper is organized as follows. Section 2 provides a detailed literature compared with the proposed work. In Section 3, we discuss the network model and formulate the novel blind nodes localization problem in the ISAC system. Section 4 discusses the proposed hybrid cooperative localization technique for ISAC in NLOS conditions in an uncertain transmission scenario. After that, simulations are presented to analyze the performance of the proposed scheme in Section 5. Lastly, Section 6 provides the concluding remarks of the paper.
2. Related Work
In the realm of next-generation wireless networks, particularly concerning the intricacies of Non-Line-of-Sight (NLOS) issues, a fundamental need exists to address these challenges to ensure precise localization and robust positioning. The core of these challenges arises from signal interference caused by obstructions within the network, which introduces measurement errors and significantly impacts location estimation accuracy. According to [34,35,36,37], resolving these obstacles necessitates the deployment of innovative methodologies and algorithms designed to counteract the effects of NLOS errors, maintain energy efficiency and effectively manage complex communication environments. The pursuit of addressing these challenges has given rise to many strategies. These strategies span a spectrum from developing resilient algorithms grounded in advanced signal processing techniques to introducing various localization methodologies tailored specifically for NLOS scenarios. A crucial consideration in this context is energy conservation, given that nodes within the network often operate on limited battery power. Failure to manage energy consumption effectively can result in node failures [38,39]. Therefore, managing energy resources becomes a pivotal aspect of addressing localization challenges. This encompasses tasks such as intelligent node selection, balancing localization performance and energy consumption, and the efficient allocation of node resources. In addition to energy concerns, the unreliability of hardware components and the complexity of the communication environment contribute to a third challenge: cooperative localization. The intricacies of cooperative localization stem from the need to harmonize the efforts of multiple nodes, often with varying degrees of trustworthiness, in determining the location of a target [40]. The fourth challenge involves localization within heterogeneous sensor networks, where traditional direct line-of-sight paths from a beacon node to an unknown node may be absent in complex environments.
In the context of NLOS error challenges, several methods have been developed to address this issue. These approaches can be categorized into two main groups: those that aim to suppress NLOS errors using specific algorithms and filtering techniques and those that focus on mitigating the impact of NLOS errors but may result in partial data loss, potentially compromising accurate positioning and robustness. This ongoing research has led to different strategies to tackle these challenges. One notable strategy involves the utilization of the TDOA algorithm for position estimation. This method employs a least squares algorithm, which is non-linear, to provide a robust solution. It utilizes a rough position estimation technique based on scaling, optimizing a complex location function that considers arrival time differences [41]. Furthermore, in [42], the authors presented a localization algorithm for a moving target based on TOA measurements in NLOS environments. Further, a Recursive Extended Kalman Filter (REKF) algorithm transforms the standard Extended Kalman Filter (EKF) into a linear regression model, effectively resolving the NLOS problem. An iterative residual technique based on the hybrid AOA and TOS approach is presented in [43]. This technique sequentially detects and eliminates NLOS instances to enhance estimation performance. In [44], the authors presented another interesting algorithm based on an Extended Kalman Smoothing Filter (EK-IMM) for NLOS position estimation. This algorithm also combines the hybrid TOA and RSS approach to improve target location accuracy and mitigate NLOS error influence. Recently, hybrid approaches for localization using LOS and NLOS scenarios have been utilized for better localization accuracy. For instance, in [45], the authors introduced a low-complexity two-step algorithm for adaptive parameter estimation and target localization in wireless sensor networks using hybrid RSS and TOA measurements for LOS only. In [46], the authors presented a hybrid RSS/TOA approach for target localization in NLOS environments using a dynamic heuristic approach for optimal measurement selection, enhancing performance over fixed choices in various scenarios. Similarly, in [47], the authors introduced a precise target node localization method under challenging NLOS conditions using hybrid RSS and TOA measurements. This method doesn’t require prior identification of NLOS paths and utilizes a non-linear weighted least squares (NLWLS) problem addressed using a majorization-minimization (MM) algorithm. Nevertheless, we utilize both LOS and NLOS links and propose Convex optimization, distinctly showcasing the primary contributions of our work with superior results.
The literature offers a diverse array of techniques to address NLOS localization. For example, in [48], the authors presented an efficient algorithm to mitigate NLOS bias for target location using combined RSS-TOA measurements. It employs a reconfiguration of the location algorithm to address this issue effectively. Another approach with low complexity is presented in [49], where a sparse pseudo-input Gaussian method is utilized to minimize the effect of LOS bias and address NLOS conditions without directly identifying its instances. In [50], the authors introduce a method that estimates the anticipated NLOS error value to rectify measurements by subtracting the expected NLOS error value.
Various other approaches focus on enhancing the accuracy of measurement models under NLOS conditions. These methods include reworking the classical MDS algorithm [51] for NLOS localization problems, as well as introducing a model that captures spatial correlation concerning NLOS error using a Maximum Posterior (MAP) estimate with Gaussian process (GP) regression [52]. Another essential method for NLOS recognition is based on MDS and quasi-accurate detection [53]. This approach effectively identifies NLOS instances by mapping the NLOS issue to an error-related model. In addition, a novel recognition method based on NLOS is introduced by utilizing a convolution algorithm [54]. In [55], a novel approach introduces a non-uniform variable within the RSS model to simulate path loss data, effectively distinguishing between LOS and NLOS distances and enhancing the accuracy of the measurement model. A refined joint EKF-based Probabilistic Data Association Location (JPDA) algorithm is presented in [56]. This algorithm differentiates between LOS and NLOS instances, resulting in superior positioning accuracy and robustness.
Alternatively, a probability and hypothesis testing-based model for NLOS detection is introduced in [57]. This model uses the innovation covariance matrix for secondary NLOS identification through hypothesis testing, disregarding location estimates affected by NLOS errors while reinforcing accurate position estimates based on probabilistic correlation. Moreover, in [53], an NLOS classifier based on AdaBoost is introduced to identify NLOS instances in wireless sensor positioning applications. Convex programming serves as a solution for NLOS issues in localization in [58]. Another approach is based on TDOA measurements in NLOS environments, with a statistical location approach utilizing empirical data [59]. Convex optimization alleviates TOA localization problems using a soft minimum approach, improving NLOS localization accuracy. In [60], an efficient convex approximation technique is introduced, which utilizes TDOA localization for an environment where direct LOS links are unavailable. This approach transforms the two convex relaxation approximations into a convex set for robust least squares. Additionally, in [61], an exciting and efficient SOC relaxation method is proposed, demonstrating minimal sensitivity to NLOS errors by focusing on the upper and lower limits of NLOS error. It is observed that it eliminates the requirements of the prior NLOS error information. In contrast, in [62], the authors introduced two algorithms named Optimal Selection Filling (BOF) and Iterative Commutative Greed (ISG) for NLOS localization. These techniques address non-convex problems by converting them into SDP for TDOA localization with NLOS links. Furthermore, in [63], the authors discussed another important parameter called an “equilibrium parameter” tied to NLOS error for robust localization. The authors then formulated a robust weighted least squares algorithm using source position and NLOS equilibrium parameters as estimation variables. Afterwards, these variables are transformed into an SDP problem to achieve better localization accuracy. Lastly, in [64], the authors presented an algorithm that leverages the sparsity of both LOS and NLOS measurement biases to mitigate NLOS issues effectively.
A detailed comparison of the proposed technique with the literature is summarized in Table 1.
Hence, the dynamic landscape of solutions addressing NLOS issues in wireless sensor networks reflects a promising localization accuracy and robustness evolution. The journey to tackle NLOS problems has witnessed the emergence of diverse approaches, from convex programming to innovative optimization methods and heuristic algorithms. These methodologies aim to tackle the impact of NLOS errors, effectively improving accuracy and reliability in positioning within challenging environments. The continuous exploration of new techniques and adaptations signals a path towards more resilient wireless systems, providing greater accuracy and stability, thus affirming a promising future in overcoming the complexities of NLOS for enhanced wireless network positioning.
3. Network Model and Problem Formulation
Consider an ISAC system in with n dimensions, where n is either 2 or 3. The network comprises N Blind Nodes (BNs) and M Anchor Nodes (ANs) with both LOS and NLOS links, as depicted in Figure 2. It is important to note that the unknown position of the i-th BN is represented as , with i belonging to the set . On the other hand, the true positions of each AN are assumed to be known and are denoted as , with k in the set . The variables used in this paper are listed in Table 2. Each BN emits a radio signal in this network, and both BNs and ANs in proximity carry out range measurements based on the received signals. Due to limited communication capabilities, BNs establish pairwise communication links only with a selected number of nodes falling within a specified range denoted as .
We formally define the collection of all possible BN-AN and BN-BN links as [65]
respectively.
3.1. Hybrid Ranging Model
The RSS and TOA measurements performed by the k-th node on the signal transmitted by the i-th BN node are related as
where and represent the transmit time and signal power, respectively, and are the non-negative NLOS biases in the RSS and TOA measurements, respectively. The terms is the noise in RSS measurements and are measurement noise in TOA measurements, respectively [66]. According to [47], the NLOS biases are assumed to be uniformly and randomly distributed with maximum bias such that , where .
In a cooperative ISAC network, the integration of RSS and TOA measurements, based on the noisy range information in (2), yields significantly enhanced localization accuracy when compared to conventional non-cooperative methods.
3.2. Problem Formulation
Let us denote the parameters of interest as , encompassing all the unknown parameters. Assuming sources that are uncorrelated and independent of error occurrence in RSS and TOA measurements, the maximum-likelihood estimation problem can be formulated as follows:
The challenge presented in Equation (4) is notably formidable, primarily due to its non-convex nature, which precludes the existence of a closed-form solution. Resolving the optimization problem outlined in Equation (4) presents a significant hurdle, entailing a multidimensional search conundrum. Furthermore, the problem in Equation (4) is underdetermined, characterized by unknown variables while only having measurements. One viable approach to address this issue involves employing iterative search techniques, although their convergence often hinges on initializing with robust starting points. These methods may occasionally converge to local minima rather than achieving optimal solutions. Consequently, a preference for sub-optimal approximations is favored over computationally intensive heuristic search algorithms.
4. Proposed Localization Method
Considering a scenario where the maximum NLOS biases for the RSS measurements are represented by and TOA measurements by , respectively. The expression in (2) can be reformulated as:
where and . Hence, the parameters becomes . It should be noted that these extra NLOS variables make the optimization problem challenging due to an under-determined system. This is due to the large number of variables compared to the number of measurements. To overcome this, we use the parameters estimation technique such that the NLOS variables are substituted with the mean NLOS variable as [63]
where and are the respective estimated parameters associated with the RSS and TOA measurements and play a critical role in our approach. Specifically, we use a technique that incorporates the upper bound on the NLOS bias and estimates these parameters.
Now, the RSS expression in (5) can be simplified using exponential scaling and first-order Taylor’s series expansion as
where = 10 and are the bias parameters which jointly represent the unknown transmission parameters and NLOS balancing parameter, and = 10, .
Ignoring second-order noise terms in (11) and rearranging gives
Utilizing (13), we formulate a worst-case estimation error minimization using a robust least-square criterion, i.e.,
Given that our primary goal is source localization, the problem defined in Equation (14) takes on a joint estimation approach, simultaneously addressing the blind node localization and bias parameters. This contrasts with the traditional approach of separately estimating transmission and NLOS parameters, considerably simplifying the original optimization problem.
Even after simplification, the optimization problem in (14) is still intractable to solve owing to its non-convexity. Nevertheless, it can be further simplified by introducing auxiliary variables such that
Note that the optimization problem in (15) is still non-convex due to its non-convex constraints. Our approach involves approximating localization through a transformation from a non-convex and NP-hard estimation problem to a convex optimization framework. This shift aims to address the need for computational efficiency and scalability. Non-convex optimization presents convergence and global optimality challenges. By approximating our problem as convex, we harness the computational advantages of established solvers, ensuring quicker convergence, scalability for larger systems, and the capability to attain a global optimum. This strategic transformation enhances the practical feasibility of solving the estimation problem within reasonable computational bounds, rendering our technique suitable for real-world applications. The major bottleneck to solve the problem in (15) is due to , which is an explicit function of . Instead , we use and express as
where and indicates the matrix with to rows of the identity matrix with size .
We utilize more auxiliary variables such that and and . Now, the constraints form in (15) can be respectively relaxed using second-order cone form as
Furthermore, the stringent equality equations tied to the newly introduced auxiliary variables can be relaxed by employing semi-definite or second-order cone optimization techniques, such as
5. Numerical Results and Discussion
The proposed method underwent comprehensive validation through various simulations by providing a well-rounded assessment of its robustness. Various performance metrics were employed to evaluate the hybrid cooperative localization method’s performance, including localization accuracy, precision, and computational efficiency. Key criteria included measurements of estimation accuracy under both LOS and NLOS conditions, convergence speed, and computational complexity, ensuring a thorough evaluation of the proposed method’s effectiveness in addressing the challenges in localization for smart cities. We assess the performance of the proposed hybrid cooperative localization method by comparing it with state-of-the-art techniques through the execution of 1000 Monte Carlo simulations (denoted as ). We have used MATLAB as a simulation tool due to its suitability in modeling physical layer problems in ISAC-based systems. The key criterion for evaluating localization accuracy is the root mean square error (RMSE), which is computed as follows:
where and are the true and estimated value of the location of i-th BN at k-th run, respectively.
5.1. Simulation Setup
We consider a 2D ISAC network where N BNs and M ANs are randomly deployed in m where = 100 m indicates the range of deployment. Any BN’s maximum communication range is kept as = 80 m. For the sake of simplicity, we assume that the measurement noise in RSS and TOA are distributed with equal variance, i.e., . The parameters and are denoted in meters. The RSS and TOA parameters are set as (30, 40) dBm, (20, 30) ns, , c = 3 × 10 m/s and = 3.
5.2. Results
We here compare the performance of the proposed hybrid cooperative localization scheme with state-of-the-art techniques, including multidimensional scaling (MDS) [67], and weighted centroid localization (WCL) [68], and majorization-minimization (MM) algorithm [47]. In [67], the authors proposed a hybrid MDS-based LOS localization technique for sensor nodes in the Internet of Underwater Things (IoUT). The results presented in [67] have been analyzed in conjunction with our work to highlight the impact of various parameters. In [68], the author focused on improving localization accuracy in ambient intelligent environments using the K-Nearest Neighbors (KNN) machine-learning technique. Similarly, in [47], the authors proposed a precise localization approach by using hybrid TOA/RSS measurements. The proposed method eliminates the need for NLOS path identification, showcasing computational efficiency and fast convergence through the MM algorithm.In our response, we draw parallels between the challenges addressed in [47] and [68], our work in ISAC systems. Besides, we also compare the proposed algorithm performance with the lower bound on the localization performance, i.e., the Cramer Rao Lower Bound (CRLB).
5.2.1. Impact of Maximum NLOS Bias
We performed simulations in MATLAB to assess the impact of the maximum NLOS bias, denoted as , on the algorithm’s performance compared to WCL, MDS, and MM, as illustrated in Figure 4. This analysis was carried out while maintaining constant values for other parameters and concurrently modifying . In the scenario where all communication links are NLOS, the parameter estimator method approximates an additional offset of . It is worth noting that this offset remains consistently applicable to all links, leading to a performance closely aligned with the parameter estimation process. Figure 4 also highlights the superior performance of the hybrid method compared to WCL, MDS, and MM-based localization techniques. The hybrid approach effectively mitigates the challenges of path-loss shadowing and the inherent uncertainties in RSS measurements. Specifically, our proposed cooperative scheme significantly outperforms the non-cooperative WCL, MDS, and MM schemes, achieving the CRLB.
5.2.2. Impact of Ranging Error
To gain further insight into the performance analysis of the proposed hybrid NLOS mitigation scheme compared to the WCL, MDS, and MM algorithm, we analyze the impact of measurement noise as given in Figure 5.
The ability of the proposed technique to counter the disruptive influence of measurement noise offers enhanced accuracy and reliability in adverse conditions. This outcome underscores the effectiveness of the proposed scheme, positioning it as a promising solution to address the challenges associated with noise-induced inaccuracies in localization. The results reveal that the proposed hybrid scheme significantly outperforms existing non-cooperative localization schemes.
5.2.3. Impact of NLOS Links
Next, we explore the impact of the network’s proportion of LOS and NLOS links. Figure 6 presents the performance analysis as we vary the percentage of NLOS links in the network, denoted as . We set the total number of LOS and NLOS links in the network as and , respectively. It’s worth noting that the existing algorithms strongly rely on the availability of a maximum number of LOS links, and their performance tends to decline with the increase in NLOS links.
Conversely, the technique proposed is much more robust, benefiting from increased NLOS links due to its better NLOS approximation capabilities. Incorporating the estimation alongside the maximum NLOS bias estimation enhances performance in scenarios with low and high numbers of NLOS links. Consequently, the proposed method consistently outperforms the state-of-the-art algorithms in all cases, with the localization performance near the CRLB.
5.2.4. Impact of Increasing BNs
Figure 7 illustrates the influence of the number of BNs in the network. Increasing the number of nodes improves network localization accuracy due to more node pairs. It’s important to note that the results in Figure 7 assume a full , ensuring that each BN can communicate with every AN and other BNs. As demonstrated in Figure 7, including cooperative measurements results in a substantial performance improvement compared to relying solely on non-cooperative measurements. Furthermore, this performance enhancement becomes more pronounced with more BNs due to a more connected network.
5.2.5. Sensing Performance
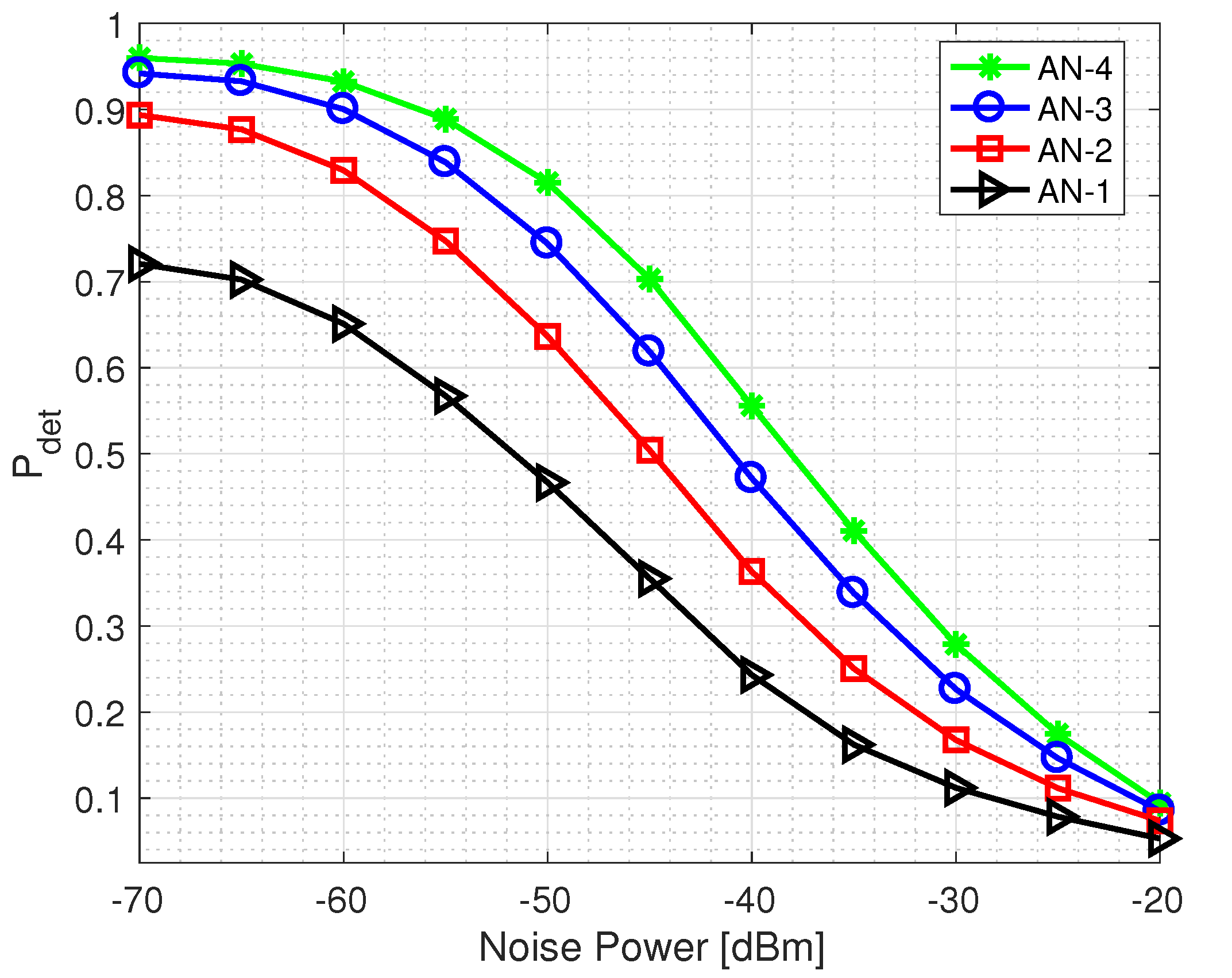
In addition to localization, we also assessed sensing performance using the probability of detection. We consider a target location vector represented by , which is one element from a set with a cardinality of . We use the probability of detection for evaluating detections correctly, specifically, the true positives in comparison to the actual positive targets as per the ground truth. For an element detected in the set to be considered part of the true positives, it must satisfy the condition that , ensuring that it is not located farther away than a distance r from the nearest undetected ground truth target, i.e.,
with distance given by the -norm . Thus, we get
As depicted in Figure 8, the detection probabilities tend to be higher when the noise power is lower. Precisely, the 70% detection rate in the case of a single AN aligns with findings from previous works in [69]. However, what’s noteworthy is that the utilization of a fusion process involving multiple ANs results in a notable enhancement in the probability of detection across the entire range of noise power levels. This improvement attributed to fusion is most pronounced when transitioning from a single AN to two, providing a significant 27% increase. As we move into the low noise power saturation regime, the improvement diminishes but still yields a 2% gain when transitioning from three to four nodes.
5.3. Computational Complexity
Ensuring precise localization is essential, but understanding the computational demands of our hybrid cooperative method is equally vital for practical application, especially in resource-limited smart city scenarios. We evaluate its implications by analyzing its computational complexity and scalability across diverse urban settings. The complexity of our convex problem is expressed as:
where K denotes total iterations, n represents equality constraints, indicates the convex cone, and refers to the i-th cone. In a worst-case scenario of a fully connected network, the total connected paths are given by . The worst-case computational complexity, as per (21), is expressed as . This comprehensive analysis confirms the practical feasibility of our hybrid cooperative localization method, highlighting its potential as a viable solution for real-world deployment in smart city environments. Future exploration will delve into how these computational considerations impact our framework’s overall performance and applicability in diverse urban landscapes.
5.4. Summary of the Results Obtained
We evaluated the performance of our proposed hybrid approach using various performance metrics, including ranging error, number of LOS/NLOS links, computational complexity, and number of nodes in the network. Moreover, we compared our hybrid cooperative localization scheme to state-of-the-art algorithms, showing its superior performance. Besides, we measured the sensing performance as a function of noise power and the localization accuracy probability of detection. Regarding localization, our hybrid approach consistently outperformed conventional methods across diverse scenarios, displaying robustness and nearing achieving the CRLB. Meanwhile, our method improved sensing accuracy via a fusion process involving multiple access points. The results suggest that our hybrid cooperative localization excels in accuracy, reliability, and computational efficiency compared to methods relying solely on RSS or TOA measurements and can provide an adaptable, advanced solution that surpasses existing methods across challenging conditions. Despite our study proposing a hybrid scheme demonstrating better localization and sensing performance accuracy, it is imperative to acknowledge certain limitations that warrant in-depth exploration. Specifically, attention must be directed toward potential scalability challenges inherent in our hybrid cooperative localization method, particularly when applied to larger or more complex urban environments. Future research may benefit from exploring additional aspects, such as energy efficiency, low complexity, and practical implementation.
6. Conclusions and Future Works
This paper has introduced a novel hybrid localization framework tailored to the specific needs of smart cities. By harnessing the combined potential of RSS and TOA measurements, we’ve developed a framework designed to address the challenges posed by NLOS conditions, even when NLOS error characteristics and transmission parameters are unknown. Our approach focused on minimizing worst-case estimation errors while employing established upper bounds on NLOS biases. We successfully transformed this initially non-convex problem into an equivalent convex form, paving the way for efficient and accurate localization. Notably, hybrid measurements proved to be a powerful solution for mitigating the path-loss shadowing issues often encountered in RSS-based measurements. Additionally, cooperative measurements demonstrated remarkable performance enhancements, particularly in scenarios characterized by high node density, compared to non-cooperative measurements. The numerical simulations carried out in this study provided concrete evidence of the superior performance of our proposed hybrid cooperative localization method when compared to existing localization techniques, such as WCL and MDS. This framework stands as a promising contribution to the development of smart cities, where precision and reliability in localization are critical for optimizing urban infrastructure, services, and the overall quality of life for residents.
Although the proposed hybrid localization scheme for smart cities provides accurate localization and sensing performance, some limitations need further investigation. For instance, it’s crucial to note potential scalability challenges in our proposed hybrid cooperative localization method, especially in larger or more intricate urban settings. Its adaptability might differ across diverse urban landscapes, prompting further investigation into its performance in various contexts. While the proposed approach is robust, exploring alternative hybrid methods such as AOA and TOA could enhance localization accuracy in future studies. Moreover, extending the framework beyond ISAC systems to other smart city applications warrants future exploration. Besides, the proposed method’s needs may have practical implications; integrating this framework into existing ISAC systems demands compatibility and seamless integration. Addressing these concerns would facilitate the method’s practical implementation in real-world smart city environments, ensuring its effectiveness and adaptability across different scales and complexities.
Author Contributions
Conceptualization, T.A. and N.S.; Formal analysis, R.A.K.; Investigation, T.A.; Methodology, R.A.K. and N.S.; Project administration, N.S.; Writing—original draft, T.A.; Writing—review & editing, R.A.K. and N.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Research Start-Up Grant at the United Arab Emirates University (UAEU) under grant number 12N129.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Santos, J.; Vanhove, T.; Sebrechts, M.; Dupont, T.; Kerckhove, W.; Braem, B.; Van Seghbroeck, G.; Wauters, T.; Leroux, P.; Latre, S.; et al. City of things: Enabling resource provisioning in smart cities. IEEE Commun. Mag. 2018, 56, 177–183. [Google Scholar] [CrossRef]
- Silva, B.N.; Khan, M.; Han, K. Towards sustainable smart cities: A review of trends, architectures, components, and open challenges in smart cities. Sustain. Cities Soc. 2018, 38, 697–713. [Google Scholar] [CrossRef]
- Batty, M.; Axhausen, K.W.; Giannotti, F.; Pozdnoukhov, A.; Bazzani, A.; Wachowicz, M.; Ouzounis, G.; Portugali, Y. Smart cities of the future. Eur. Phys. J. Spec. Top. 2012, 214, 481–518. [Google Scholar] [CrossRef]
- Harrison, C.; Eckman, B.; Hamilton, R.; Hartswick, P.; Kalagnanam, J.; Paraszczak, J.; Williams, P. Foundations for smarter cities. IBM J. Res. Dev. 2010, 54, 1–16. [Google Scholar] [CrossRef]
- Khalil, R.A.; Saeed, N. Convex hull optimization for robust localization in ISAC systems. IEEE Sens. Lett. 2023, 7, 5504104. [Google Scholar] [CrossRef]
- Qu, K.; Guo, S.; Saeed, N.; Ye, J. Near-field integrated sensing and communications: Unlocking potentials and shaping the future. arXiv 2023, arXiv:2308.00252. [Google Scholar]
- Chehri, A.; Quadar, N.; Saadane, R. Survey on localization methods for autonomous vehicles in smart cities. In Proceedings of the 4th International Conference on Smart City Applications, New York, NY, USA, 2–4 October 2019; pp. 1–6. [Google Scholar]
- Liu, A.; Huang, Z.; Li, M.; Wan, Y.; Li, W.; Han, T.X.; Liu, C.; Du, R.; Tan, D.K.P.; Lu, J.; et al. A survey on fundamental limits of integrated sensing and communication. IEEE Commun. Surv. Tutor. 2022, 24, 994–1034. [Google Scholar] [CrossRef]
- Li, D.; Deng, L.; Gupta, B.B.; Wang, H.; Choi, C. A novel CNN based security guaranteed image watermarking generation scenario for smart city applications. Inf. Sci. 2019, 479, 432–447. [Google Scholar] [CrossRef]
- Guebli, W.; Belkhir, A. Inconsistency detection-based LOD in smart homes. Int. J. Semant. Web Inf. Syst. (IJSWIS) 2021, 17, 56–75. [Google Scholar] [CrossRef]
- Cui, Y.; Liu, F.; Jing, X.; Mu, J. Integrating sensing and communications for ubiquitous IoT: Applications, trends, and challenges. IEEE Netw. 2021, 35, 158–167. [Google Scholar] [CrossRef]
- Guo, S.; Lu, B.; Wen, M.; Dang, S.; Saeed, N. Customized 5G and Beyond Private Networks with Integrated URLLC, eMBB, mMTC, and Positioning for Industrial Verticals. IEEE Commun. Stand. Mag. 2022, 6, 52–57. [Google Scholar] [CrossRef]
- Liu, F.; Cui, Y.; Masouros, C.; Xu, J.; Han, T.X.; Eldar, Y.C.; Buzzi, S. Integrated sensing and communications: Towards dual-functional wireless networks for 6G and beyond. IEEE J. Sel. Areas Commun. 2022, 40, 1728–1767. [Google Scholar] [CrossRef]
- De Lima, C.; Belot, D.; Berkvens, R.; Bourdoux, A.; Dardari, D.; Guillaud, M.; Isomursu, M.; Lohan, E.S.; Miao, Y.; Barreto, A.N.; et al. Convergent communication, sensing and localization in 6G systems: An overview of technologies, opportunities and challenges. IEEE Access 2021, 9, 26902–26925. [Google Scholar] [CrossRef]
- Khalil, R.A.; Saeed, N.; Almutiry, M.; Alenezi, A.H. Energy-efficient anchor activation protocol for non-cooperative localization of Industrial Internet of Things (IIoT). ICT Express 2023, 9, 815–820. [Google Scholar] [CrossRef]
- Meng, K.; Wu, Q.; Xu, J.; Chen, W.; Feng, Z.; Schober, R.; Swindlehurst, A.L. UAV-enabled integrated sensing and communication: Opportunities and challenges. IEEE Wirel. Commun. 2023. [Google Scholar] [CrossRef]
- Cui, Y.; Liu, F.; Masouros, C.; Xu, J.; Han, T.X.; Eldar, Y.C. Integrated Sensing and Communications: Background and Applications. In Integrated Sensing and Communications; Springer: Berlin/Heidelberg, Germany, 2023; pp. 3–21. [Google Scholar]
- Salem, H.; Quamar, M.; Mansoor, A.; Elrashidy, M.; Saeed, N.; Masood, M. Data-driven Integrated Sensing and Communication: Recent Advances, Challenges, and Future Prospects. arXiv 2023, arXiv:2308.09090. [Google Scholar]
- Meng, K.; Wu, Q.; Ma, S.; Chen, W.; Wang, K.; Li, J. Throughput maximization for UAV-enabled integrated periodic sensing and communication. IEEE Trans. Wirel. Commun. 2022, 22, 671–687. [Google Scholar] [CrossRef]
- Paszek, K.; Grzechca, D.; Becker, A. Design of the UWB positioning system simulator for LOS/NLOS environments. Sensors 2021, 21, 4757. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, J.; Diao, H.; Yang, L. Signal Detection Theory-Based Localization Method in Urban NLOS Environment. In Proceedings of the 2021 IEEE/CIC International Conference on Communications in China (ICCC), Xiamen, China, 28–30 July 2021; pp. 195–200. [Google Scholar]
- Liu, Q.; Gao, C.; Shang, R.; Peng, Z.; Zhang, R.; Gan, L.; Gao, W. NLOS signal detection and correction for smartphone using convolutional neural network and variational mode decomposition in urban environment. GPS Solut. 2023, 27, 31. [Google Scholar] [CrossRef]
- Khalil, R.A.; Saeed, N.; Almutiry, M. UAVs-assisted passive source localization using robust TDOA ranging for search and rescue. ICT Express 2022, 9, 677–682. [Google Scholar] [CrossRef]
- Huang, S.; Wang, B.; Zhao, Y.; Luan, M. Near-field RSS-based localization algorithms using reconfigurable intelligent surface. IEEE Sens. J. 2022, 22, 3493–3505. [Google Scholar] [CrossRef]
- Saeed, N.; Ahmad, W.; Bhatti, D.M.S. Localization of vehicular ad-hoc networks with RSS based distance estimation. In Proceedings of the 2018 International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; pp. 1–6. [Google Scholar]
- Elnour, R.A.; Ali, E.S.; Yousif, I.; Saeed, R.A.; Mokhtar, R.A.; Hayder, G.; Khalifa, O.O. Social Internet of Things (SIoT) Localization for Smart Cities Traffic Applications. In Sustainability Challenges and Delivering Practical Engineering Solutions: Resources, Materials, Energy, and Buildings; Springer: Berlin/Heidelberg, Germany, 2023; pp. 159–166. [Google Scholar]
- Feng, Z.; Wei, Z.; Chen, X.; Yang, H.; Zhang, Q.; Zhang, P. Joint communication, sensing, and computation enabled 6G intelligent machine system. IEEE Netw. 2021, 35, 34–42. [Google Scholar] [CrossRef]
- Saeed, N.; Nam, H. Robust multidimensional scaling for cognitive radio network localization. IEEE Trans. Veh. Technol. 2014, 64, 4056–4062. [Google Scholar] [CrossRef]
- Meng, X.; Li, Y.; Wu, Z.; Hong, S.; Chang, S. A Semidefinite Relaxation Approach for Mobile Target Localization Based on TOA and Doppler Frequency Shift Measurements. IEEE Sens. J. 2023, 23, 16051–16057. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, K. Communication, sensing, computing and energy harvesting in smart cities. IET Smart Cities 2022, 4, 265–274. [Google Scholar] [CrossRef]
- Coluccia, A.; Fascista, A. On the hybrid TOA/RSS range estimation in wireless sensor networks. IEEE Trans. Wirel. Commun. 2017, 17, 361–371. [Google Scholar] [CrossRef]
- Ingabire, W.; Larijani, H.; Gibson, R.M. LoRa RSSI based outdoor localization in an urban area using random neural networks. In Intelligent Computing, Proceedings of the 2021 Computing Conference, Virtual, 15–16 July 2021; Springer: Berlin/Heidelberg, Germany, 2021; Volume 2, pp. 1032–1043. [Google Scholar]
- del Peral-Rosado, J.A.; Granados, G.; Raulefs, R.; Leitinger, E.; Grebien, S.; Wilding, T.; Dardari, D.; Lohan, E.; Wymeersch, H.; Floch, J.; et al. Whitepaper on New Localization Methods for 5G Wireless Systems and the Internet-of-Things; COST Action CA15104, IRACON, 2018; pp. 1–27. [Google Scholar]
- Saeed, N.; Stojkoska, B.R. Robust localisation algorithm for large scale 3D wireless sensor networks. Int. J. Ad Hoc Ubiquitous Comput. 2016, 23, 82–91. [Google Scholar] [CrossRef]
- Wang, Y.; Cheng, Y.; Cheng, L. Fusion Localization Algorithm Based on Robust IMM Model Combined with Semi-Definite Programming. Actuators 2022, 11, 146. [Google Scholar] [CrossRef]
- Tian, X.; Wei, G.; Song, Y.; Ding, D. Cooperative localization based on semidefinite relaxation in wireless sensor networks under non-line-of-sight propagation. Wirel. Netw. 2023, 29, 775–785. [Google Scholar] [CrossRef]
- Qiu, F.; Zhang, W. Position Error Bound of the AOA Based Cooperative Localization in 3D Space. In Proceedings of the International Conference on Guidance, Navigation and Control, Harbin, China, 5–7 August 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 5422–5431. [Google Scholar]
- Qiu, F.; Zhang, W. Efficient cooperative localization method with node selection based on position error bound. Signal Process. 2023, 209, 109037. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Z.; Zheng, S.; Zheng, P.; Liang, X.; Li, Y.; Bu, X.; Zou, X. Range-Aided Drift-Free Cooperative Localization and Consistent Reconstruction of Multi-Ground Robots. IEEE Robot. Autom. Lett. 2023, 8, 2094–2101. [Google Scholar] [CrossRef]
- Mei, X.; Han, D.; Saeed, N.; Wu, H.; Ma, T.; Xian, J. Range difference-based target localization under stratification effect and NLOS bias in UWSNs. IEEE Wirel. Commun. Lett. 2022, 11, 2080–2084. [Google Scholar] [CrossRef]
- Qiao, T.; Redfield, S.; Abbasi, A.; Su, Z.; Liu, H. Robust coarse position estimation for TDOA localization. IEEE Wirel. Commun. Lett. 2013, 2, 623–626. [Google Scholar] [CrossRef]
- Hammes, U.; Zoubir, A.M. Robust MT tracking based on M-estimation and interacting multiple model algorithm. IEEE Trans. Signal Process. 2011, 59, 3398–3409. [Google Scholar] [CrossRef]
- Horiba, M.; Okamoto, E.; Shinohara, T.; Matsumura, K. An improved NLOS detection scheme for hybrid-TOA/AOA-based localization in indoor environments. In Proceedings of the 2013 IEEE International Conference on Ultra-Wideband (ICUWB), Sydney, NSW, Australia, 5–18 September 2013; pp. 37–42. [Google Scholar]
- Liao, J.F.; Chen, B.S. Robust mobile location estimator with NLOS mitigation using interacting multiple model algorithm. IEEE Trans. Wirel. Commun. 2006, 5, 3002–3006. [Google Scholar] [CrossRef]
- Coluccia, A.; Fascista, A. Hybrid TOA/RSS range-based localization with self-calibration in asynchronous wireless networks. J. Sens. Actuator Netw. 2019, 8, 31. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M. Target localization via integrated and segregated ranging based on RSS and TOA measurements. Sensors 2019, 19, 230. [Google Scholar] [CrossRef]
- Panwar, K.; Katwe, M.; Babu, P.; Ghare, P.; Singh, K. A majorization-minimization algorithm for hybrid TOA-RSS based localization in NLOS environment. IEEE Commun. Lett. 2022, 26, 1017–1021. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M. A robust NLOS bias mitigation technique for RSS-TOA-based target localization. IEEE Signal Process. Lett. 2018, 26, 64–68. [Google Scholar] [CrossRef]
- Yang, X. NLOS mitigation for UWB localization based on sparse pseudo-input Gaussian process. IEEE Sens. J. 2018, 18, 4311–4316. [Google Scholar] [CrossRef]
- Wang, Y.; Jing, Y.; Jia, Z. An indoor mobile localization strategy for robot in NLOS environment. Int. J. Distrib. Sens. Netw. 2013, 9, 758749. [Google Scholar] [CrossRef]
- Saeed, N.; Nam, H. MDS-LM for Wireless Sensor Networks Localization. In Proceedings of the IEEE 79th Vehicular Technology Conference (VTC Spring), Seoul, Republic of Korea, 18–21 May 2014; pp. 1–6. [Google Scholar]
- Li, S.; Hedley, M.; Collings, I.B.; Humphrey, D. Joint trajectory and ranging offset estimation for accurate tracking in NLOS environments. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 3–14. [Google Scholar] [CrossRef]
- Zhu, Y.; Ma, T.; Li, Z.; Sun, D.; Sun, X.; Zhao, X.; Hu, F. NLOS identification and correction based on multidimensional scaling and quasi-accurate detection. IEEE Access 2019, 7, 53977–53987. [Google Scholar] [CrossRef]
- Cheng, L.; Xue, M.; Wang, Y.; Wang, Y.; Bi, Y. A robust tracking algorithm based on modified generalized probability data association for wireless sensor network. IEEE Trans. Ind. Electron. 2021, 69, 2136–2146. [Google Scholar] [CrossRef]
- Cheng, L.; Li, Y.; Xue, M.; Wang, Y. An indoor localization algorithm based on modified joint probabilistic data association for wireless sensor network. IEEE Trans. Ind. Inform. 2020, 17, 63–72. [Google Scholar] [CrossRef]
- Sun, Y.; Yang, S.; Wang, G.; Chen, H. Robust RSS-based source localization with unknown model parameters in mixed LOS/NLOS environments. IEEE Trans. Veh. Technol. 2021, 70, 3926–3931. [Google Scholar] [CrossRef]
- Zeng, Z.; Liu, S.; Wang, L. Nlos identification for uwb based on channel impulse response. In Proceedings of the 2018 12th International Conference on Signal Processing and Communication Systems (ICSPCS), Cairns, QLD, Australia, 17–19 December 2018; pp. 1–6. [Google Scholar]
- Li, S.; Hedley, M.; Collings, I.B.; Humphrey, D. TDOA-based localization for semi-static targets in NLOS environments. IEEE Wirel. Commun. Lett. 2015, 4, 513–516. [Google Scholar] [CrossRef]
- Su, Z.; Shao, G.; Liu, H. A soft-minimum method for NLOS error mitigation in TOA systems. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, Canada, 18–21 September 2016; pp. 1–4. [Google Scholar]
- Wang, G.; So, A.M.C.; Li, Y. Robust convex approximation methods for TDOA-based localization under NLOS conditions. IEEE Trans. Signal Process. 2016, 64, 3281–3296. [Google Scholar] [CrossRef]
- Zhang, S.; Gao, S.; Wang, G.; Li, Y. Robust NLOS error mitigation method for TOA-based localization via second-order cone relaxation. IEEE Commun. Lett. 2015, 19, 2210–2213. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, Z.; Hao, B.; Shi, J. Sensor selection for TDOA-based localization in wireless sensor networks with non-line-of-sight condition. IEEE Trans. Veh. Technol. 2019, 68, 9935–9950. [Google Scholar] [CrossRef]
- Chen, H.; Wang, G.; Ansari, N. Improved robust TOA-based localization via NLOS balancing parameter estimation. IEEE Trans. Veh. Technol. 2019, 68, 6177–6181. [Google Scholar] [CrossRef]
- Jin, D.; Yin, F.; Zoubir, A.M.; So, H.C. Exploiting sparsity of ranging biases for NLOS mitigation. IEEE Trans. Signal Process. 2021, 69, 3782–3795. [Google Scholar] [CrossRef]
- Saeed, N.; Nam, H. Energy efficient localization algorithm with improved accuracy in cognitive radio networks. IEEE Commun. Lett. 2017, 21, 2017–2020. [Google Scholar] [CrossRef]
- Macii, D.; Colombo, A.; Pivato, P.; Fontanelli, D. A data fusion technique for wireless ranging performance improvement. IEEE Trans. Instrum. Meas. 2012, 62, 27–37. [Google Scholar] [CrossRef]
- Khalil, R.A.; Saeed, N.; Babar, M.I.; Jan, T.; Din, S. Bayesian multidimensional scaling for location awareness in hybrid-Internet of Underwater Things. IEEE/CAA J. Autom. Sin. 2021, 9, 496–509. [Google Scholar] [CrossRef]
- Achroufene, A. RSSI-based Hybrid Centroid-K-Nearest Neighbors localization method. Telecommun. Syst. 2023, 82, 101–114. [Google Scholar] [CrossRef]
- Muth, C.; Schmalen, L. Autoencoder-based Joint Communication and Sensing of Multiple Targets. In Proceedings of the WSA & SCC 2023, 26th International ITG Workshop on Smart Antennas and 13th Conference on Systems, Communications, and Coding, Braunschweig, Germany, 27–27 February 2023; pp. 1–6. [Google Scholar]
Figure 1.
Location-based services in ISAC-assisted smart cities.

Figure 2.
Network model for hybrid RSS and TOA-based ISAC system with LOS and NLOS links.

Figure 3.
Flow chart of the proposed localization algorithm.

Figure 4.
Maximum NLOS bias vs. localization error.

Figure 5.
Standard deviation vs. localization error.

Figure 6.
Impact of LOS links vs. localization error.

Figure 7.
Impact of increasing BNs vs. localization error.

Figure 8.
Probability detection concerning noise power for different sensing access points.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison of the proposed work with state-of-the-art.
| Ref. | Proposed Method | Ranging Technique Used | Optimization Technique Used | LOS/NLOS |
|---|---|---|---|---|
| [41] | Scaling by MAjorizing a Complicated Function (SMACOF) | TDOA | Non-linear least squares (NLS) algorithm | NLOS |
| [42] | Robust extended Kalman filter (REKF) | TOA | M-estimation algorithm | Both LOS and NLOS |
| [43] | Iterative minimum residual | TOA/AOA | iterative minimization | Both LOS and NLOS |
| [44] | Kalman-based interacting multiple model | TOA | Kalman estimation | Both LOS and NLOS |
| [45] | Range-Based Localization with Self-Calibration | Hybrid TOA and RSS | Joint maximum likelihood (ML) estimation | LOS |
| [46] | Integrated and Segregated Ranging Based model | Hybrid TOA and RSS | Weighted least squares (WLS) | NLOS |
| [47] | Majorization-minimization (MM) algorithm | Hybrid TOA and RSS | Joint ad-hoc (JAH) estimator | NLOS |
| [48] | Generalized trust region sub-problem (GTRS) | RSS-TOA | Bias mitigation algorithm | NLOS |
| [49] | Sparse Pseudo-input Gaussian Process | TOA | Bias mitigation algorithm | NLOS |
| [50] | Prior knowledge-based correction strategy (PKCS) | RSS | Residual weighting algorithm | Both LOS and NLOS |
| [52] | Joint Trajectory and Ranging Offset Estimation | TOA | Gaussian process regression | NLOS |
| [55] | Probabilistic data association localization | TOA | EKF | Both LOS and NLOS |
| [56] | Robust weighted least squares (RWLS) | RSS | Semidefinite relaxation | NLOS |
| [53] | NIMQ-based multidimensional scaling | RSS | Quasi-Accurate detection (QUAD) | NLOS |
| [54] | Fusion-based NLOS model | TDOA | Modified probabilistic data association algorithm | NLOS |
| [57] | Soft-minimum method for NLOS | TOA | Semidefinite programming | NLOS |
| [53] | Adaptive boosting (AdaBoost) | residual TOA | Mean excess delay | NLOS |
| [58] | Statustics of ranging techniques | TDOA | Iterative positioning | NLOS |
| [59] | Soft-minimum Method | TOA | Semidefinite programming algorithm | NLOS |
| [60] | Robust least squares algorithm | TDOA | Convex relaxation | NLOS |
| [61] | Robust second-order cone relaxation | TOA | Second-order cone relaxation | NLOS |
| [62] | Best option filling algorithm | TDOA | second-order cone relaxation | LOS |
| [63] | Robust weighted least squares | TOA | Semidefinite relaxation | NLOS |
| [64] | Sparse algorithm | TOA | Residual error function | Both LOS and NLOS |
| This work | Robust ISAC-based localization | Hybrid RSS and TOA | Convex optimization | Both LOS and NLOS |
Table 2.
List of major variables used in this paper.
| Variable | Description |
|---|---|
| N | Total number of blind nodes (BNs) |
| M | Total number of anchor nodes (ANs) |
| n | Number of dimensions n = 2 or 3 |
| Unknown position of BN | |
| Unknown position of AN | |
| Total number of nodes (ANs + BNs) | |
| Links between BN and AN | |
| Links between BN and BN | |
| Transmit time | |
| Signal power | |
| and | Non-negative NLOS biases |
| Noise in RSS | |
| Noise in TOA | |
| Parameters of interest | |
| Maximum-likelihood estimation | |
| Explicit function of | |
| c | Speed of light |
| Bias parameter | |
| Balancing parameter | |
| Transmission parameter | |
| and | Auxiliary variables |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Althobaiti, T.; Khalil, R.A.; Saeed, N. Robust ISAC Localization in Smart Cities: A Hybrid Network Approach for NLOS Challenges with Uncertain Parameters. J. Sens. Actuator Netw. 2024, 13, 2. https://doi.org/10.3390/jsan13010002
AMA Style
Althobaiti T, Khalil RA, Saeed N. Robust ISAC Localization in Smart Cities: A Hybrid Network Approach for NLOS Challenges with Uncertain Parameters. Journal of Sensor and Actuator Networks. 2024; 13(1):2. https://doi.org/10.3390/jsan13010002
Chicago/Turabian StyleAlthobaiti, Turke, Ruhul Amin Khalil, and Nasir Saeed. 2024. "Robust ISAC Localization in Smart Cities: A Hybrid Network Approach for NLOS Challenges with Uncertain Parameters" Journal of Sensor and Actuator Networks 13, no. 1: 2. https://doi.org/10.3390/jsan13010002
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.