
Parametric Approach to Assessing Performance of High-Lift Device Active Flow Control Architectures


Abstract
:
1. Introduction
2. An Overview of the Rapid Architecture Tradeoff Environment (RATE)
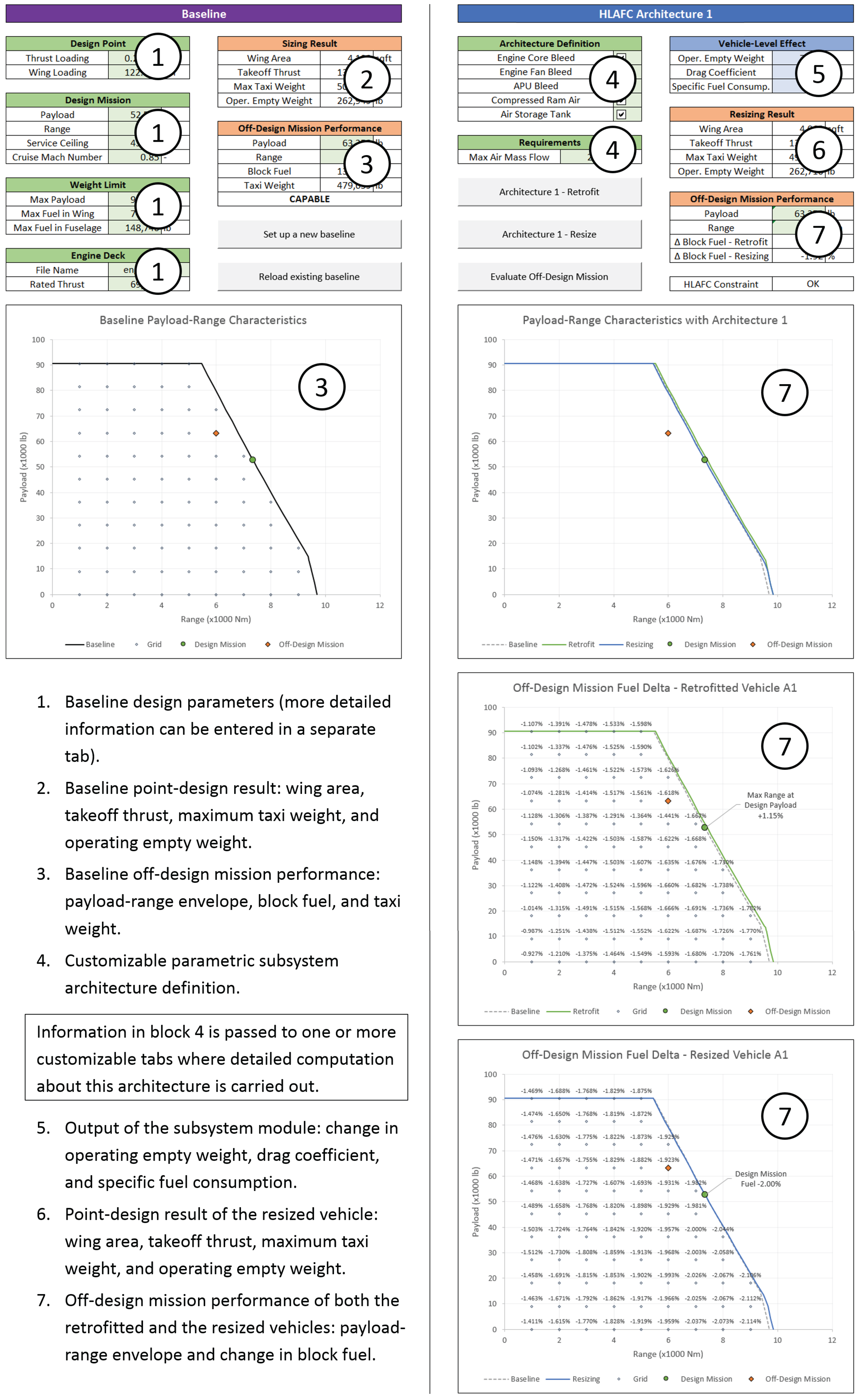
2.1. Conventional Aircraft Sizing and Mission Performance Evaluation
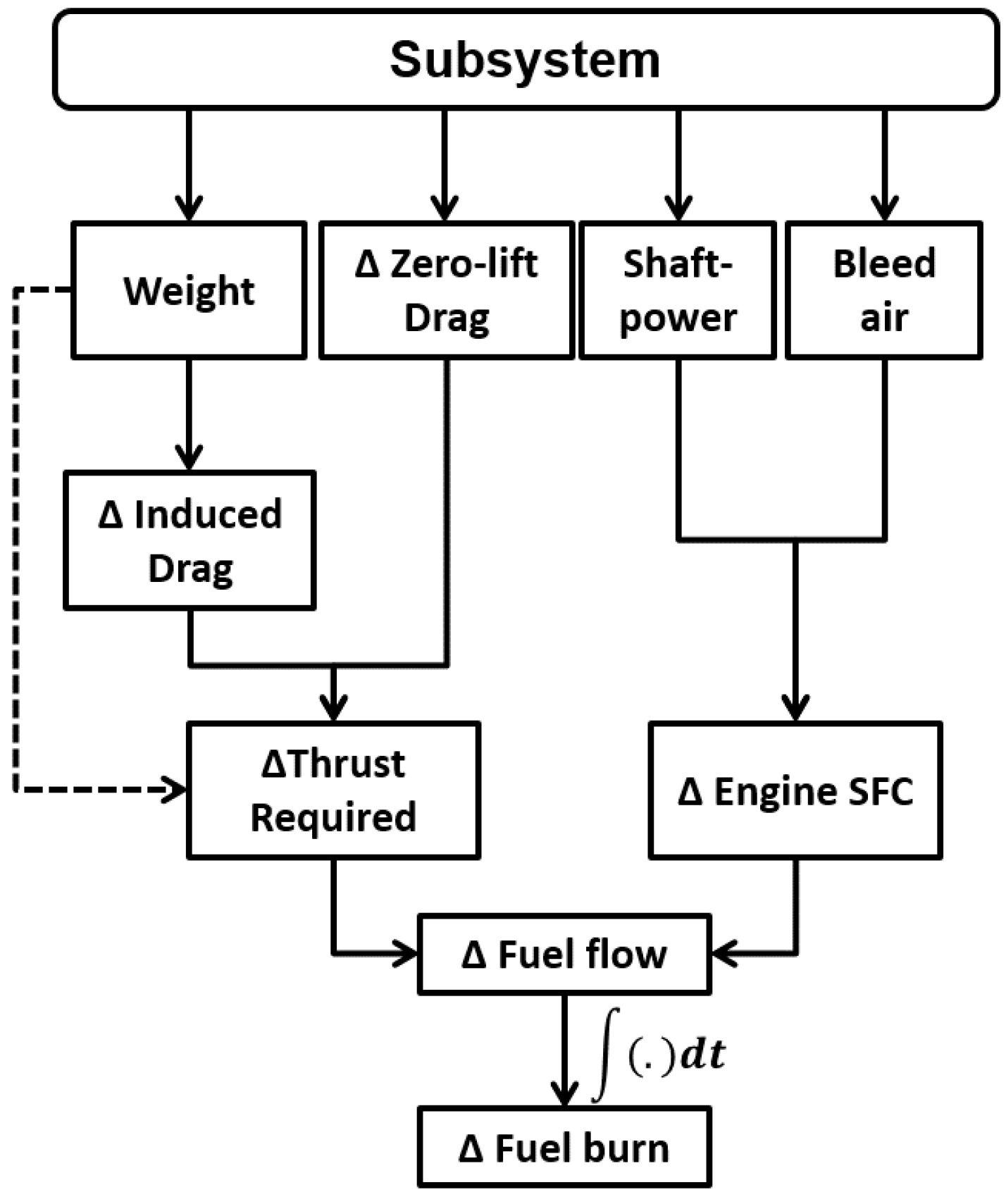
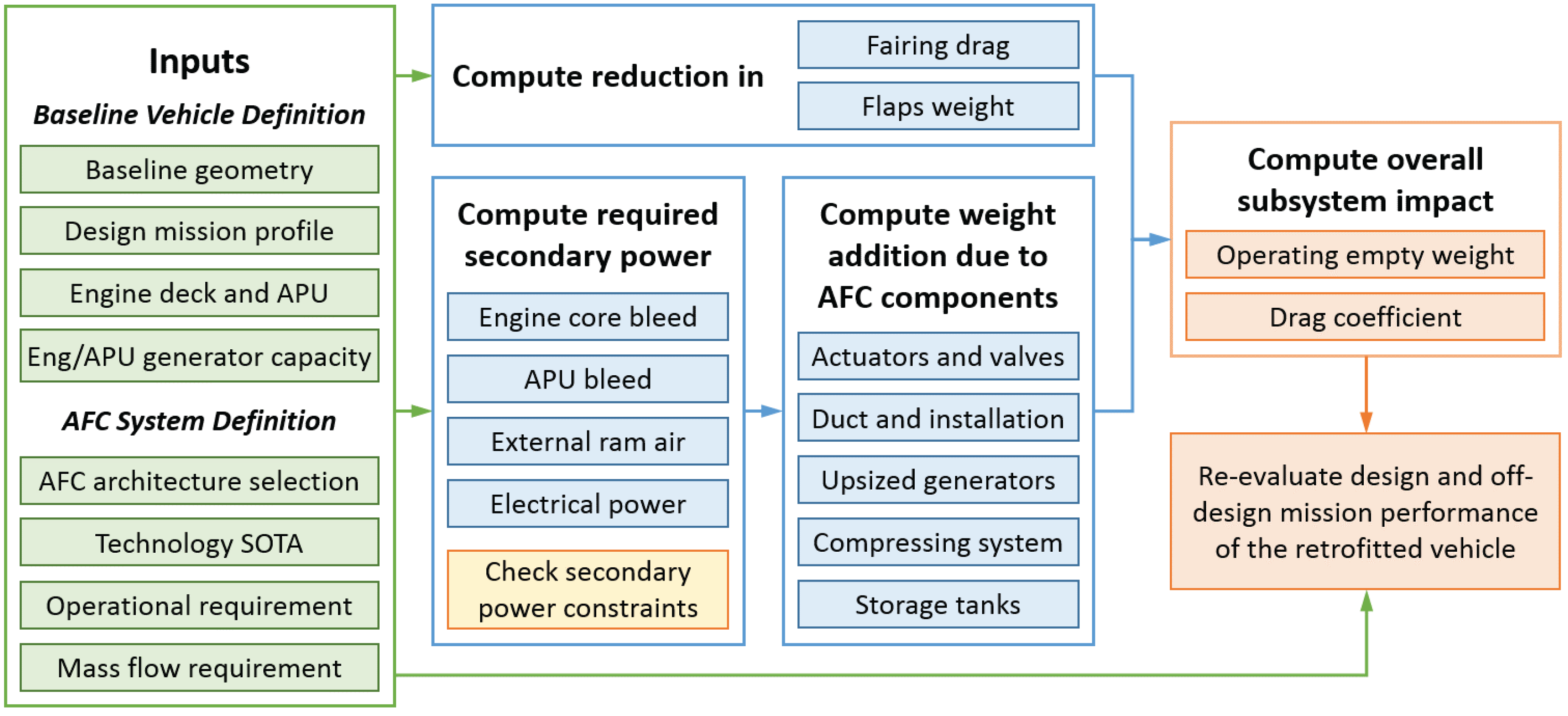
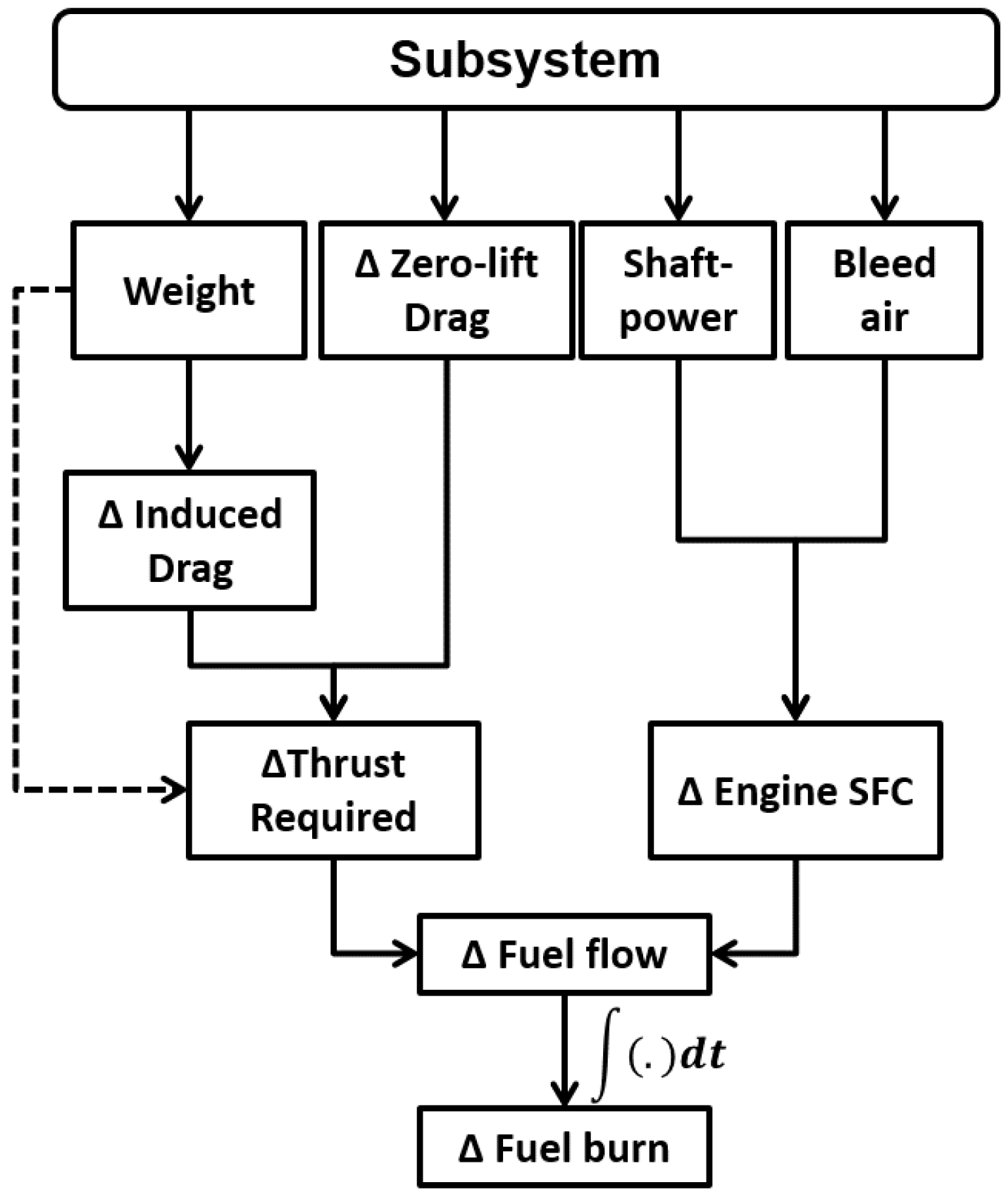
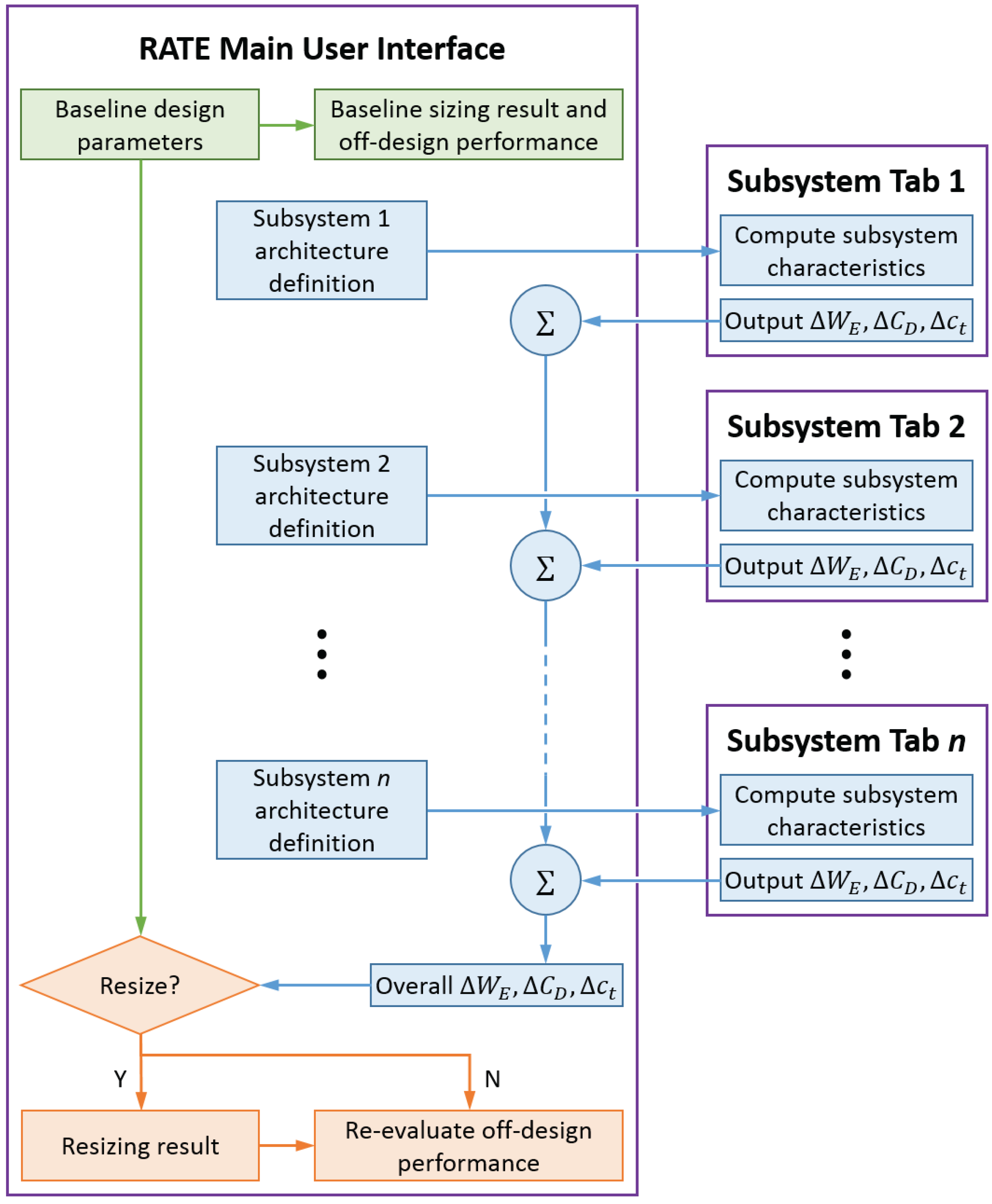
2.2. Subsystem Analysis
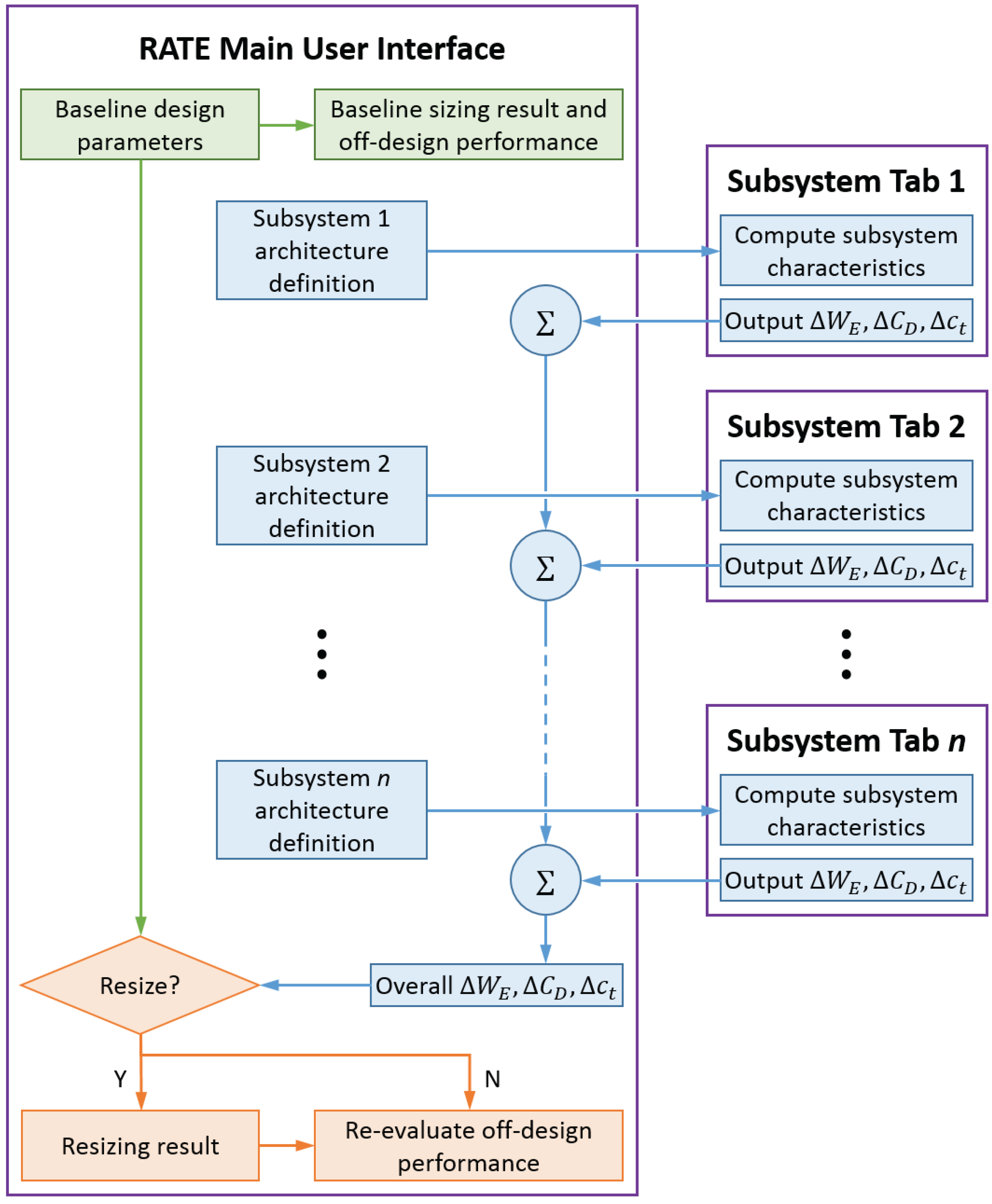
2.3. Retrofit and/or Resizing Impact Assessment
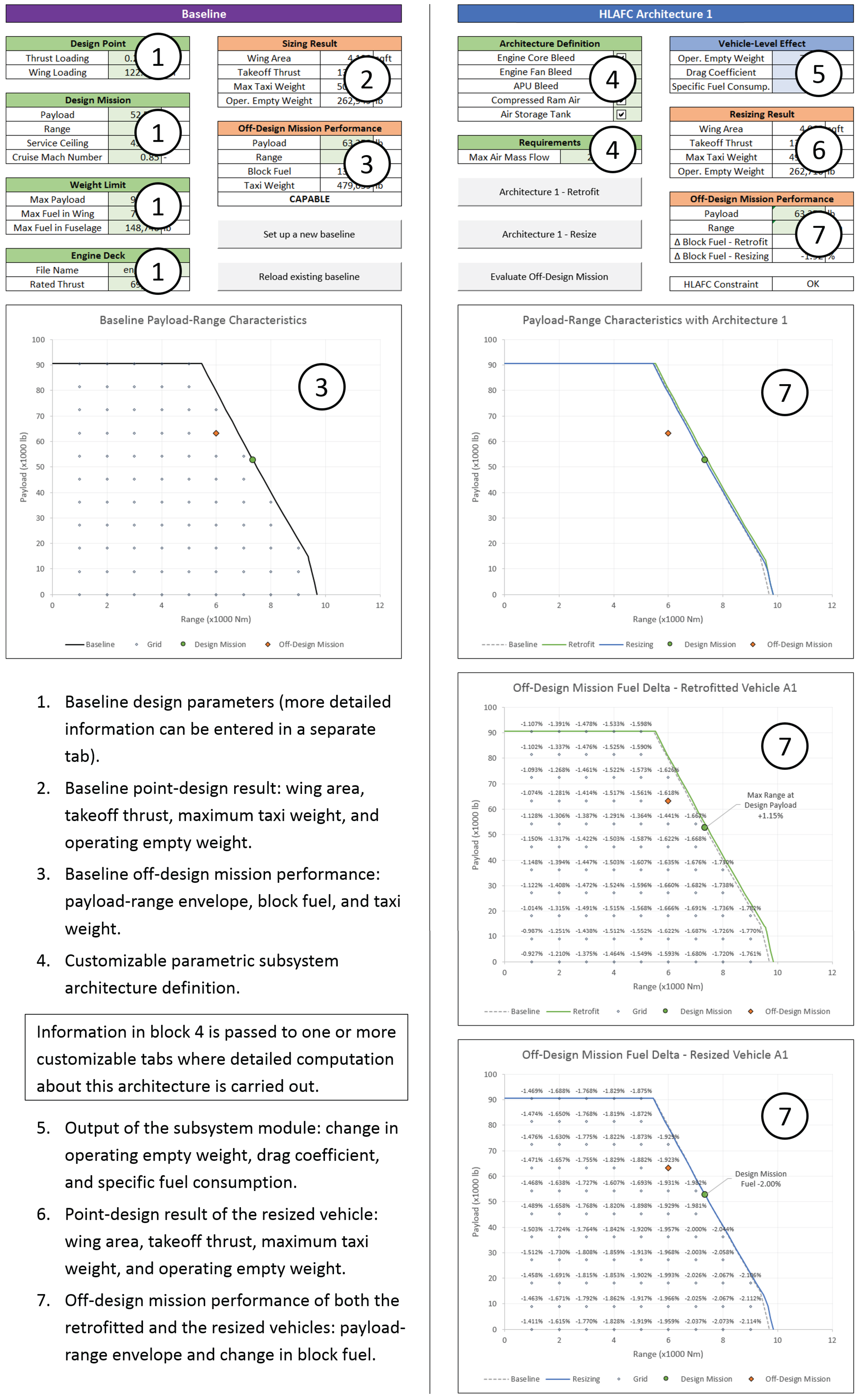
- Scenario 1: The vehicle may be assumed to be retrofitted, in which case the weight limits (maximum takeoff weight, maximum payload weight, and maximum fuel capacity), essential geometry (fuselage, wing and tail), and engine deck are held invariant. The weight difference due to the subsystem architecture, , is directly added to the baseline operating empty weight, , to obtain an updated operating empty weight of the retrofitted vehicle. With changes in empty weight, drag, and fuel consumption, the maximum range of the retrofitted vehicle at each payload level is re-computed to generate an updated payload-range envelope, and mission performance may be re-evaluated at different payload-range combinations. Note that the retrofitted vehicle may or may not be able to fly the original design range when carrying the design payload. Primary outputs of the retrofit scenario include payload-range characteristics with updated fuel consumption, takeoff gross weight, and change in the fuel required to fly specified off-design missions.
- Scenario 2: The vehicle may be assumed to be resized, for the same design mission as with the baseline, using the same sizing method except that the weight buildup relationships, the drag coefficient, and the specific fuel consumption are modified according to the output from the subsystem analysis module (Module # 2). The resized vehicle maintains the same takeoff thrust-to-weight ratio, takeoff wing loading, design payload weight, design range, and maximum payload weight. However, depending on the subsystem impacts, the operating empty weight, the maximum takeoff weight, the wing area, the sea-level static thrust, and the maximum fuel capacity may be different from those of the conventional baseline. Off-design mission analysis is performed similar to that in the retrofit scenario, and the outputs include an updated payload-range envelope, and updated fuel consumption, takeoff gross weight, and change in fuel required at each specified off-design mission.
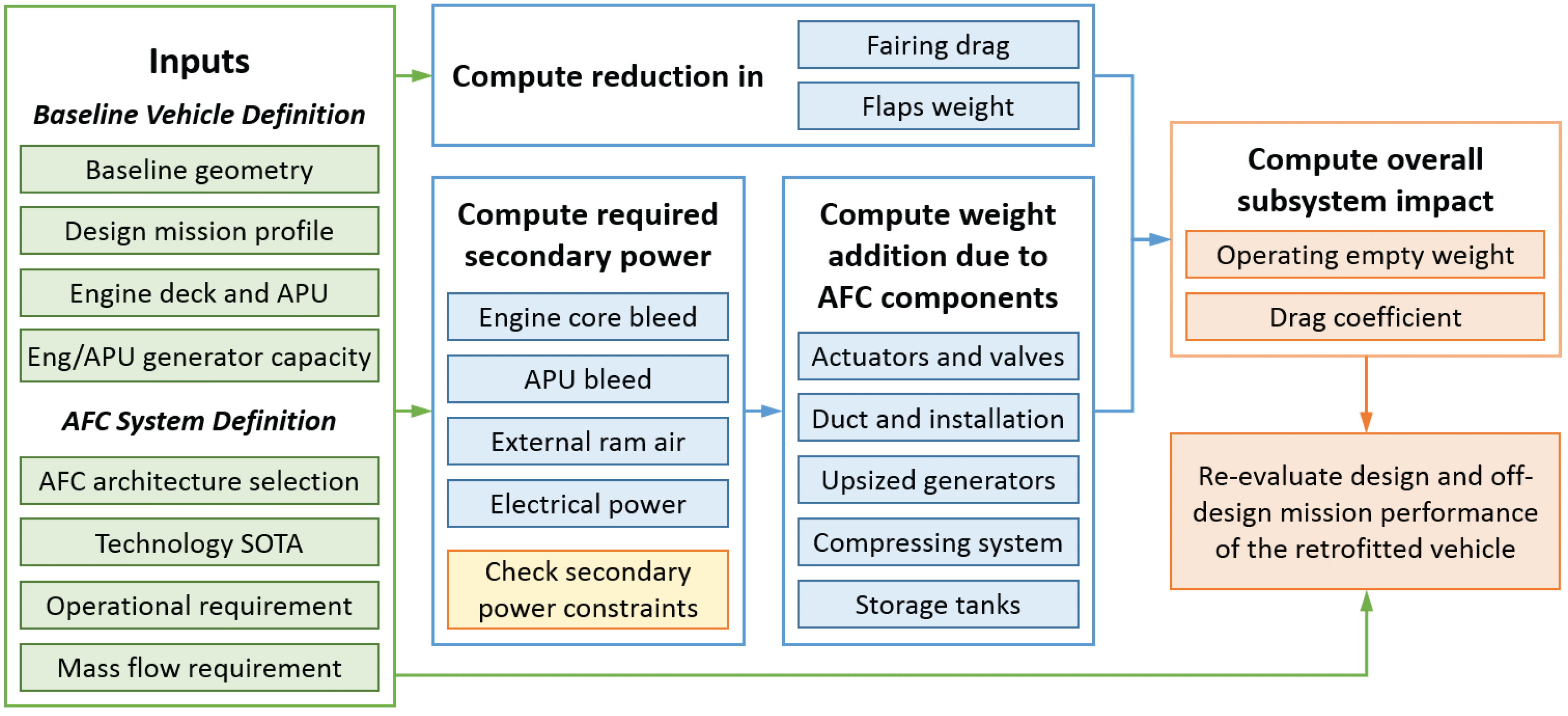
3. High-Lift Active Flow Control (HLAFC) Sizing and Analysis Approach
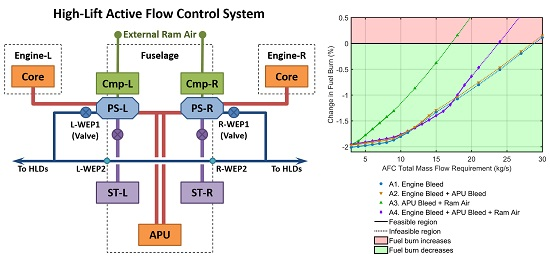
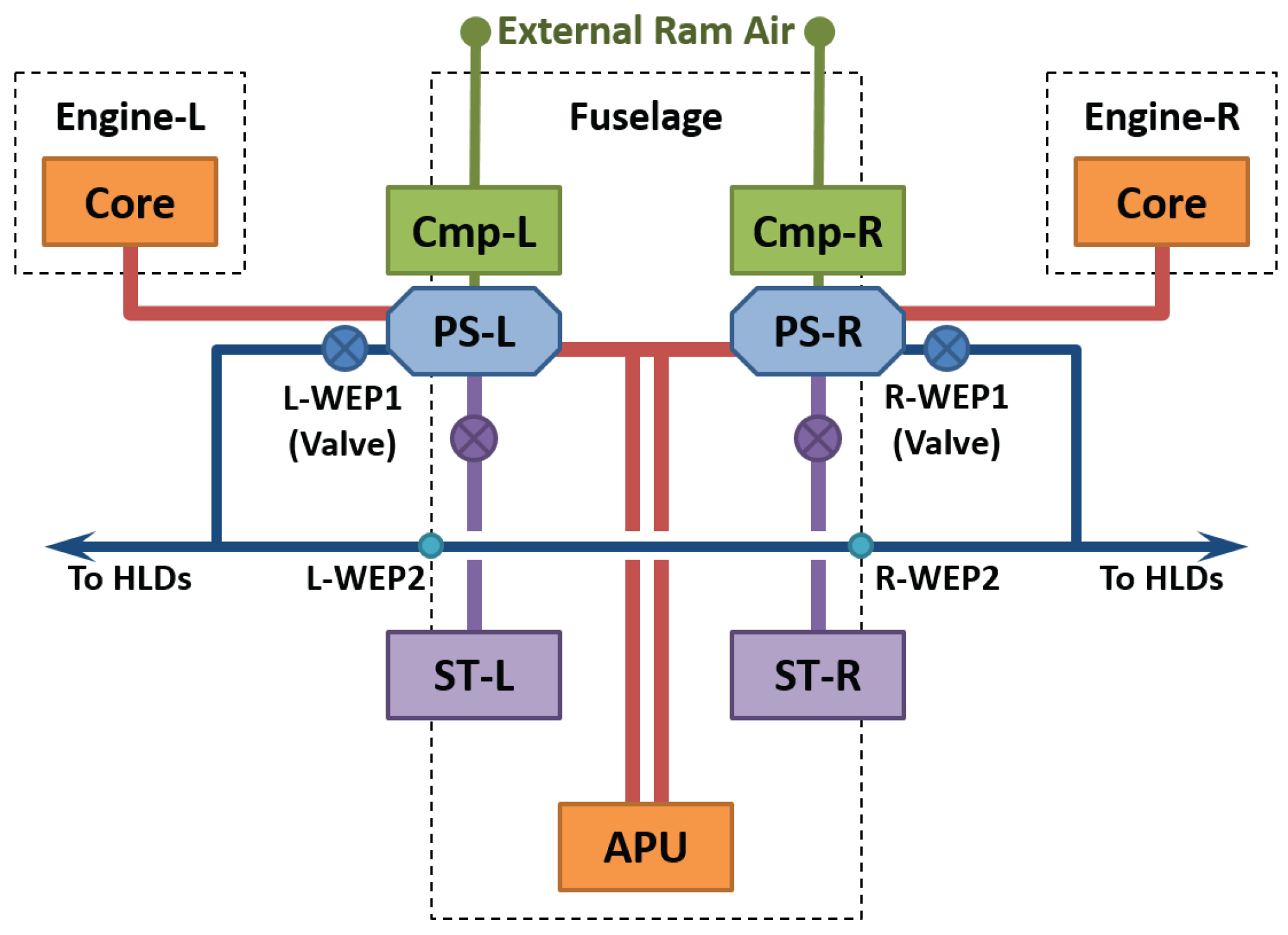
3.1. HLAFC Architectures Considered
3.2. Flap Weight and Drag Reduction
3.3. Sizing of Air Storage Tanks and Compression System
3.4. Sizing of Pneumatic Ducting
3.5. Sizing of Actuators and Valves
3.6. Up-Sizing of Electrical Generators
4. Assessing Integrated High-Lift Active Flow Control Architectures
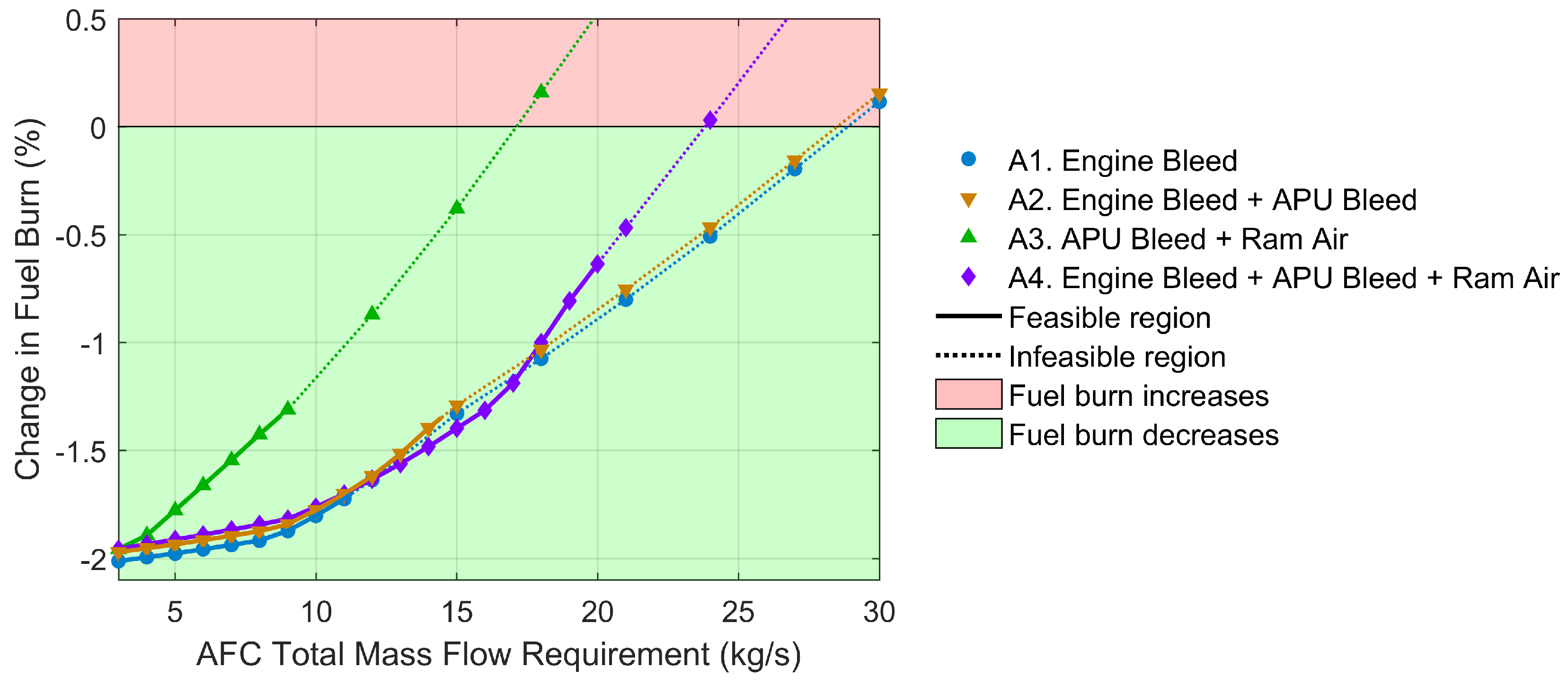
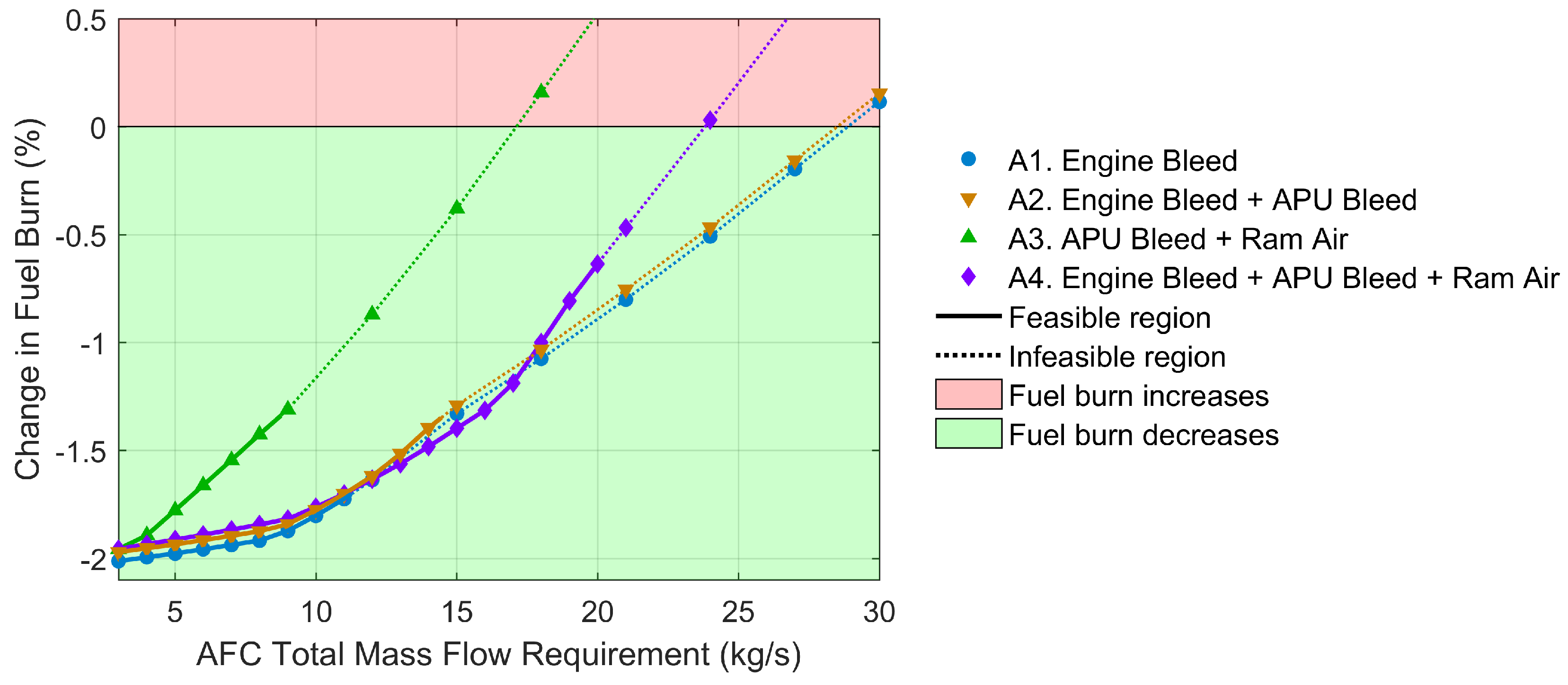
4.1. Comparative Assessment of Architecture Performance for Range of Mass Flow Requirements
- A1 becomes infeasible above kg/s due to insufficient bleed;
- A2 becomes infeasible above kg/s due to insufficient bleed;
- A3 becomes infeasible above kg/s due to insufficient generator capacity;
- A4 becomes infeasible above kg/s due to insufficient generator capacity.
For Architecture k, if the AFC system requires at most x kg/s of air mass flow to recover the baseline high-lift system performance, then the resulting net impact on vehicle-level fuel burn relative to the conventional baseline is y%.
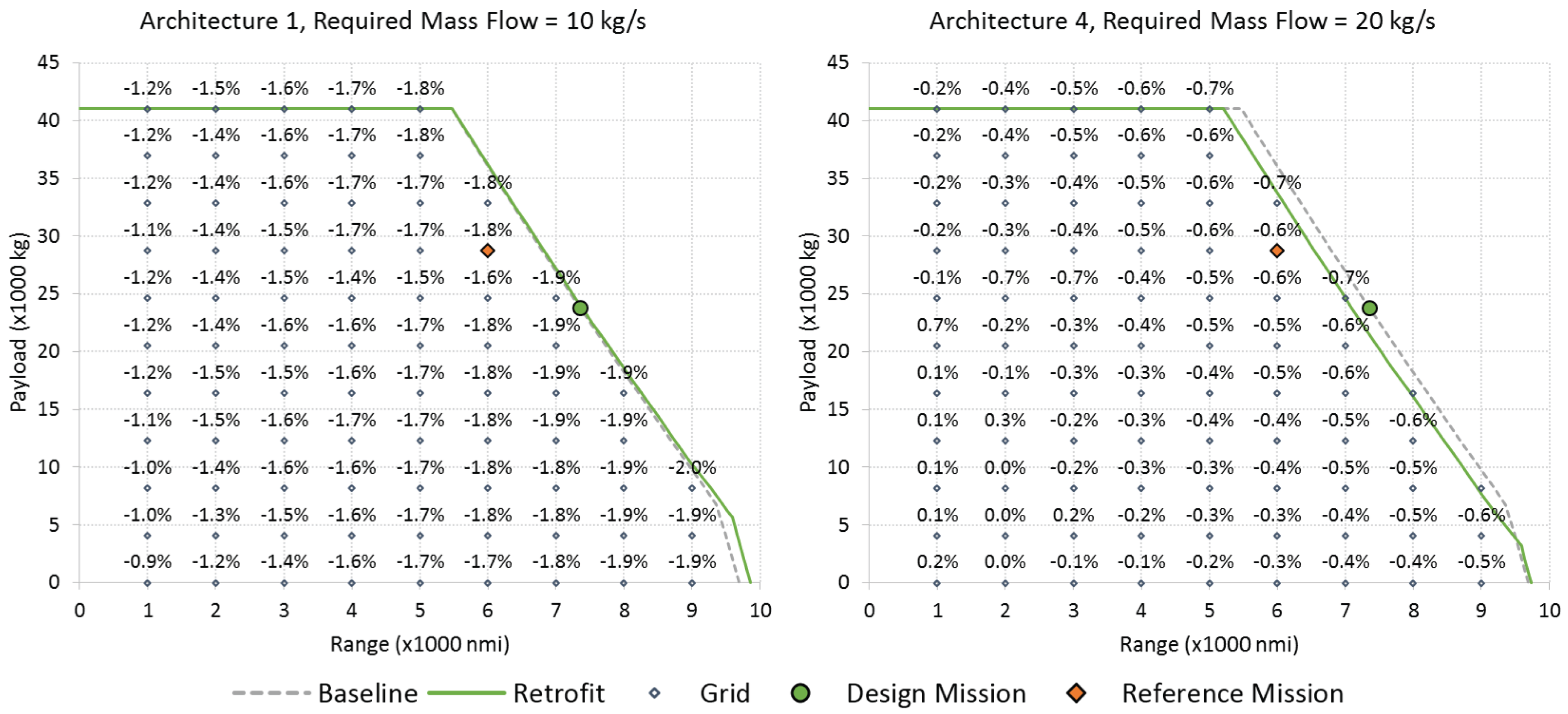
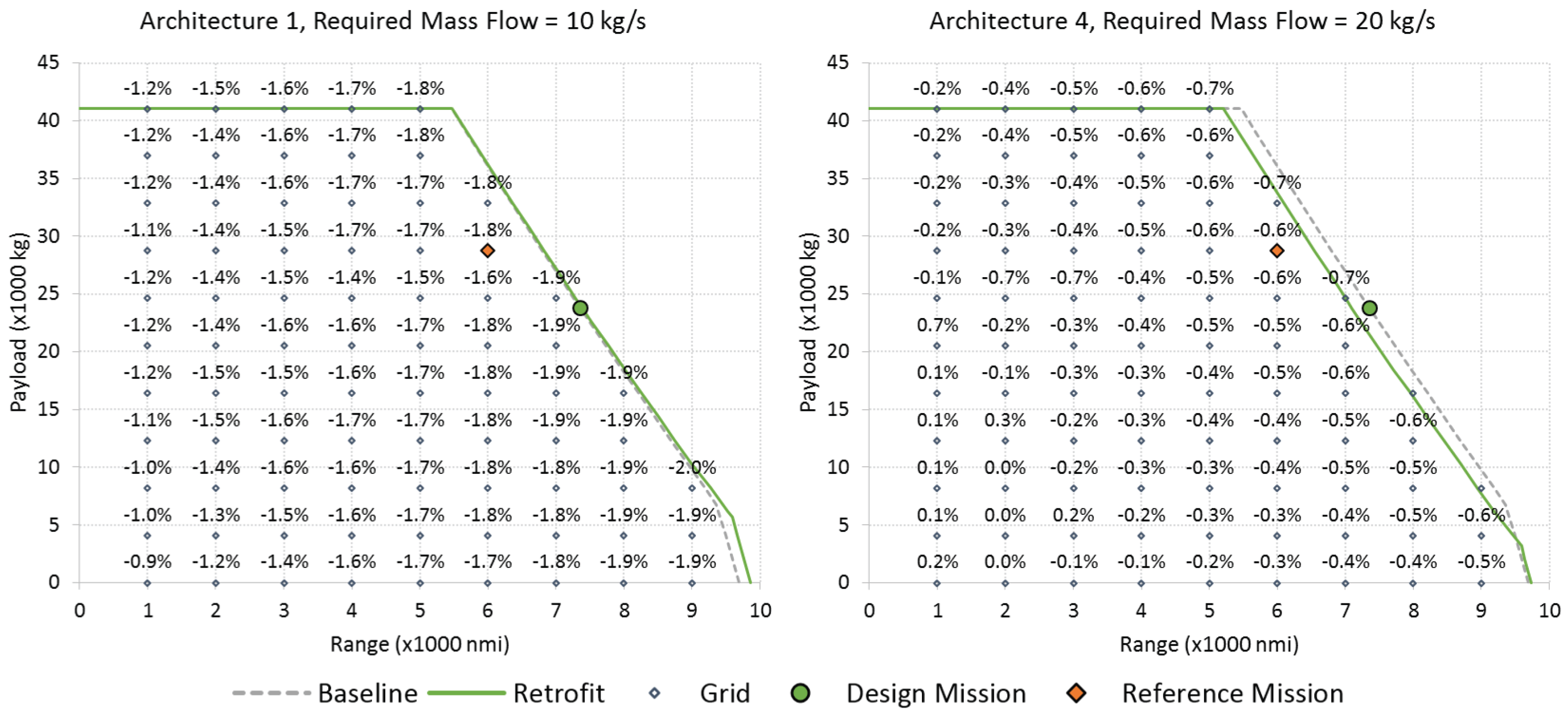
4.2. Impact on Payload-Range Envelope
5. Conclusions and Future Work
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | Reference/Comments |
|---|---|---|---|
| Maximum total core bleed | 13.2 | kg/s | [12] |
| Maximum total APU bleed | 3.2 | kg/s | [1] |
| Core bleed deduction | 0.5 | kg/min/PAX | [21] |
| Bleed pressure | 330 | kPa | [22] |
| Bleed temperature | 453 | K | [22] |
| Baseline engine generator capacity, total | 240 | kVA | [13] |
| Maximum generator capacity, total | 1000 | kVA | [11] |
| Existing electrical power off-take | 0.37 | kW/PAX | [23] |
| Power factor | 0.9 | - | Assumed |
| AC distribution efficiency | 0.95 | - | [24] |
| Power electronics efficiency | 0.97 | - | [25] |
| Motor efficiency | 0.9 | - | [25] |
| Compressor efficiency | 0.85 | - | [23] |
| Diffuser efficiency | 0.97 | - | Assumed |
| Generator power-to-mass ratio | 2.76 | kW/kg | [23] |
| Power electronic power-to-mass ratio | 2 | kW/kg | [23] |
| Motor power-to-mass ratio | 4 | kW/kg | [23] |
| Compressor power-to-mass ratio | 2.5 | kW/kg | [23] |
| Landing altitude | 0 | m | Assumed |
| Approach airspeed | 140 (259) | knots (km/h) | Assumed |
| Charging altitude | 3048 | m | Assumed |
| Charging airspeed | 250 (463) | knots (km/h) | Assumed |
| Ram air inlet area | 0.163 | m | Assumed |
| Number of tanks | 2 | - | Assumed |
| Tank diameter | 1.5 | m | Assumed |
| Tank length | 4.0 | m | Assumed |
| Tank charging time | 300 | s | Assumed |
| Tank discharging time | 20 | s | Assumed |
| Tank material tensile strength | 2400 | MPa | [18] |
| Tank material density | 8105 | kg/m | [18] |
| Tank safety factor | 1.4 | - | Assumed |
| Tank minimum wall thickness | 1 | mm | Assumed |
| Actuator spanwise spacing | 0.2268 | m | [26] |
| Actuator unit weight | 0.4990 | kg | [1] |
| Control valve unit weight | 0.4536 | kg | [1] |
| Plenum pressure | 253 | kPa | [1] |
| Duct design pressure | 330 | kPa | [22] |
| Duct design temperature | 473 | K | [22] |
| Duct longest path | 41.74 | m | Baseline geometry |
| Duct allowable stress | 49.5 | MPa | [19] |
| Duct burst pressure factor | 3 | - | [27] |
| Duct non-ferrous factor | 0.4 | - | [20] |
| Duct material density | 4510 | kg/m | [19] |
| Duct minimum wall thickness | 1 | mm | Assumed |
| Duct maximum pressure loss | 35 | kPa | Assumed |
| Number of AFC pneumatic system | 2 | - | Assumed |
| AFC pneumatic system unit weight | 4.536 | kg | Assumed |
| K-miscellaneous | 0.15 | - | Assumed |
References
- Mooney, H.P.; Brandt, J.B.; Lacy, D.S.; Whalen, E.A. AFC-Enabled Vertical Tail System Integration Study; NASA/CR-2014-218168; The Boeing Company: Huntington Beach, CA, USA, 2014. [Google Scholar]
- Hartwich, P.M.; Dickey, E.D.; Sclafani, A.J.; Camacho, P.; Gonzales, A.B.; Lawson, E.L.; Mairs, R.Y.; Shmilovich, A. AFC-Enabled Simplified High-Lift System Integration Study; NASA/CR-2014-218521; The Boeing Company: Huntington Beach, CA, USA, 2014. [Google Scholar]
- Hartwich, P.M.; Shmilovich, A.; Lacy, D.S.; Dickey, E.D.; Scalafani, A.; Sundaram, P.; Yadlin, Y. Refined AFC-Enabled High-Lift System Integration Study; NASA/CR-2016-219170; The Boeing Company: Huntington Beach, CA, USA, 2016. [Google Scholar]
- Andino, M.; Lin, J.; Washburn, A.; Whalen, E.; Graff, E.; Wygnanski, I. Flow Separation Control on a Full-Scale Vertical Tail Model using Sweeping Jet Actuators. In Proceedings of the AIAA SCITECH Conference, Kissimmee, FL, USA, 5–9 January 2015; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2015. Number AIAA-2015-0785. [Google Scholar]
- Whalen, E.A.; Lacy, D.S.; Lin, J.C.; Andino, M.Y.; Washburn, A.E.; Graff, E.C.; Wygnanski, I.J. Performance Enhancement of a Full-Scale Vertical Tail Model Equipped with Active Flow Control. In Proceedings of the 53rd AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 5–9 January 2015; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2015. Number AIAA-2015-0784. [Google Scholar]
- Lin, J.C.; Andino, M.Y.; Alexander, M.G.; Whalen, E.A.; Spoor, M.A.; Tran, J.T.; Wygnanski, I.J. An Overview of Active Flow Control Enhanced Vertical Tail Technology Development. In Proceedings of the AIAA SCITECH Conference, San Diego, CA, USA, 4–8 January 2016. Number AIAA-2016-0056.
- Whalen, E.A. Flight Services and Aircraft Access: Active Flow Control Vertical Tail and Insect Accretion and Mitigation Flight Test; NASA/CR-2016-219005; The Boeing Company: Hazelwood, MO, USA, 2016. [Google Scholar]
- Rudolph, P. High Lift Systems on Subsonic Commercial Airliners; NASA Contractor Report 4746 CONTRACT A46374D(LAS); National Aeronautics and Space Administration: Washington, DC, USA, 1996.
- McCullers, L. Aircraft Configuration Optimization including Optimized Flight Profiles. In Proceedings of the Symposium on Recent Experiences in Multidisciplinary Analysis and Optimization; NASA Langley Research Center: Hampton, VA, USA, 1984. NASA CP-2327. pp. 395–412. [Google Scholar]
- Claus, R.W.; Evans, A.L.; Follen, G.J. Multidisciplinary Propulsion Simulation using NPSS. In Proceedings of the 4th Symposium on Multidisciplinary Analysis and Optimization, Cleveland, OH, USA, 21–23 September 1992; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1992. Number AIAA-92-4709-CP. [Google Scholar]
- Sinnett, M. Boeing 787 No-Bleed Systems: Saving Fuel and Enhancing Operational Efficiencies. Boeing Aero Magazine. Quarter 4. 2007. Available online: http://www.boeing.com/commercial/aeromagazine/articles/qtr_4_07/article_02_1.html (accessed on 14 December 2016).
- EASA Type Certification Data Sheet No. IM.E.102—General Electric Company—GEnx Series Engines; European Aviation Safety Agency (EASA): Cologne, Germany, 2016.
- Queen, H. Introducing the 767-400 Extended Range Airplane. Boeing Aero Magazine. Quarter 3. 1998. Available online: http://www.boeing.com/commercial/aeromagazine/aero_03/textonly/ps01txt.html (accessed on 14 December 2016).
- Bennett, J. Fault Tolerant Electromechanical Actuators for Aircraft. Ph.D. thesis, School of Electrical, Electronic and Computer Engineering, Newcastle University, Newcastle upon Tyne, UK, November 2010. Available online: https://theses.ncl.ac.uk/dspace/bitstream/10443/990/1/Bennett%2010.pdf (accessed on 14 December 2016). [Google Scholar]
- Nelson, T. 787 Systems and Performance. Available online: http://myhres.com/Boeing-787-Systems-and-Performance.pdf (accessed on 14 December 2016).
- Torenbeek, E. Development and Application of a Comprehensive, Design-sensitive Weight Prediction Method for Wing Structures of Transport Category Aircraft; Report LR-693; Delft University of Technology (TU Delft): Delft, The Netherlands, 1992. [Google Scholar]
- Schoensleben, S. Integrated Trailing Edge Flap Track Mechanism for Commercial Aircraft. Master’s Thesis, Swiss Federal Institute of Technology Zurich (ETH Zurich), Zurich, Switzerland, 2006. Available online: http://e-collection.library.ethz.ch/eserv/eth:28634/eth-28634-01.pdf (accessed on 14 December 2016). [Google Scholar]
- 18 Percent Nickel Maraging Steels—Engineering Properties. Available online: http://www1.diccism.unipi.it/Valentini_Renzo/slides%20lezione%20met.%20meccanica/18_NickelMaragingSteel_EngineeringProperties_4419_.pdf (accessed on 14 December 2016).
- Parrilla, X. Hybrid Environmental Control System Integrated Modeling Trade Study Analysis for Commercial Aviation. Ph.D. Thesis, University of Cincinnati, Cincinnati, OH, USA, 19 February 2014. Available online: https://etd.ohiolink.edu/!etd.send_file?accession=ucin1396454368&disposition=inline (accessed on 14 December 2016). [Google Scholar]
- Peacock, D.K. Effective Design Using Titanium. Available online: http://www.ginattatecnologie.it/Docs/Meeting6/VI%20Meeting%20-%2003.pdf (accessed on 14 December 2016).
- Advisory Circular 25-20—Pressurization, Ventilation and Oxygen Systems Assessment for Subsonic Flight Including High Altitude Operation. Available online: https://www.faa.gov/documentLibrary/media/Advisory_Circular/AC25-20.pdf (accessed on 14 December 2016).
- Airbus A330 Flight Crew Operating Manual—Pneumatic. Available online: http://www.smartcockpit.com/aircraft-ressources/A330-Pneumatic.html (accessed on 14 December 2016).
- Chakraborty, I. Subsystem Architecture Sizing and Analysis for Aircraft Conceptual Design. Ph.D. Thesis, Guggenheim School of Aerospace Engineering, Georgia Institute of Technology, Atlanta, GA, USA, 2015. Available online: https://smartech.gatech.edu/handle/1853/54427 (accessed on 14 December 2016). [Google Scholar]
- Advisory Circular AC 43.13-1B—Acceptable Methods, Techniques, and Practices—Aircraft Inspection and Repair. Available online: http://www.faa.gov/documentLibrary/media/Advisory_Circular/AC_43.13-1B_w-chg1.pdf (accessed on 14 December 2016).
- Whyatt, G.; Chick, L. Electrical Generation for More-Electric Aircraft Using Solid Oxide Fuel Cells; Report PNNL-21382; Pacific Northwest National Laboratory: Richland, WA, USA, 2012. [Google Scholar]
- Hiller, B.; Cai, Y.; Karagoz, E.; Wilhelms, C.; Chakraborty, I.; Briceno, S.; Collins, K.; Mavris, D. Framework for Assessing Impact of Active Flow Control Technologies for Commercial Aircraft. In Proceedings of the AIAA Aviation 2016 Conference, Washington, DC, USA, 13–17 June 2016. Number AIAA-2016-3283.
- Airworthiness Standards: Transport Category Airplanes. Available online: http://www.ecfr.gov/cgi-bin/text-idx?SID=9bb59ae94aca021a7954ca55ae1219cc&mc=true&node=pt14.1.25&rgn=div5 (accessed on 14 December 2016).

| Item | Value | Unit |
|---|---|---|
| Passenger capacity | 242 | - |
| Design payload weight | 23,820 | kg |
| Design range | 7355 | nmi |
| 13,621 | km | |
| Harmonic range | 5470 | nmi |
| 10,130 | km | |
| Ferry range | 9696 | nmi |
| 17,957 | km | |
| Cruise Mach number | 0.85 | - |
| Maximum ramp weight | 227,365 | kg |
| Maximum payload weight | 41,050 | kg |
| Operating empty weight | 119,271 | kg |
| Maximum fuel capacity | 101,323 | kg |
| Sea-level static thrust | 2 × 309.1 | kN |
| Wing planform area | 380.9 | m |
| Wingspan | 60.4 | m |
| Wing aspect ratio | 9.59 | - |
| Wing taper ratio | 0.159 | - |
| Wing 1/4-chord sweep | 32.1 | deg |
| Wing dihedral | 7.0 | deg |
| Trailing-edge flaps stowed area | 48.9 | m |
| Trailing-edge flaps span | 33.2 | m |
| Horizontal tail planform area | 75.8 | m |
| Horizontal tail aspect ratio | 5.22 | - |
| Horizontal tail taper ratio | 0.243 | - |
| Horizontal tail 1/4-chord sweep | 36.6 | deg |
| Vertical tail planform area | 40.8 | m |
| Vertical tail aspect ratio | 1.80 | - |
| Vertical tail taper ratio | 0.327 | - |
| Vertical tail 1/4-chord sweep | 40.6 | deg |
| AFC Architecture | Engine Core Bleed | APU Bleed | External Ram Air |
|---|---|---|---|
| A1 | X | ||
| A2 | X | X | |
| A3 | X | X | |
| A4 | X | X | X |
| Component | Specific Weight (kg/m) |
|---|---|
| Flap Panels | 13.2 |
| Supports | 7.3 |
| Actuation | 9.8 |
| Fairing | 0.5 |
| Total | 30.8 |
| Weight and Performance Impacts | Architecture 1 at 10 kg/s | Architecture 4 at 20 kg/s |
|---|---|---|
| Δ Operating empty weight | % | % |
| Δ Block fuel (28,735 kg payload, 6000 nmi range) | % | % |
| Δ Harmonic range (max 41,050 kg payload) | nmi/ km | nmi/ km |
| (%) | (%) | |
| Δ Range at design payload (23,820 kg payload) | nmi/ km | nmi/ km |
| (%) | (%) | |
| Δ Ferry range (zero payload) | nmi/ km | nmi/ km |
| (%) | (%) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, Y.; Gao, Z.; Chakraborty, I.; Briceno, S.; Mavris, D. Parametric Approach to Assessing Performance of High-Lift Device Active Flow Control Architectures. Aerospace 2017, 4, 6. https://doi.org/10.3390/aerospace4010006
Cai Y, Gao Z, Chakraborty I, Briceno S, Mavris D. Parametric Approach to Assessing Performance of High-Lift Device Active Flow Control Architectures. Aerospace. 2017; 4(1):6. https://doi.org/10.3390/aerospace4010006
Chicago/Turabian StyleCai, Yu, Zhenyu Gao, Imon Chakraborty, Simon Briceno, and Dimitri Mavris. 2017. "Parametric Approach to Assessing Performance of High-Lift Device Active Flow Control Architectures" Aerospace 4, no. 1: 6. https://doi.org/10.3390/aerospace4010006