

Helicopter Rescue for Flood Disaster: Scheduling, Simulation, and Evaluation


1
School of Aeronautic Science and Engineering, Beihang University, Beijing 100083, China
2
Department of Aerospace Engineering, Faculty of Engineering, University of Bristol, Queens Road, Bristol BS8 1QU, UK
*
Authors to whom correspondence should be addressed.
Aerospace 2022, 9(12), 822; https://doi.org/10.3390/aerospace9120822
Submission received: 23 October 2022
/
Revised: 7 December 2022
/
Accepted: 11 December 2022
/
Published: 14 December 2022
(This article belongs to the Collection Air Transportation—Operations and Management)
Abstract
:Frequent severe floods have caused great losses to urban safety and the economy, which raises high requirements for the efficiency and effectiveness of emergency rescue. Due to the flood characteristics, flood rescue requires a more rapid responder and decision-making compared with other kinds of disaster rescue. In recent years, aviation emergency rescue (AER) has attracted much attention for flood applications. In order to evaluate the effectiveness of AER for flood disasters, the present study proposes a conceptual model of helicopter AER scheduling and develops a simulation system of helicopter AER scheduling using multiple agents. Seven elements are considered in the conceptual model: helicopters, the command-and-control center, temporary take-off/landing points, mission demand points, resettlement points, loading points, and unloading points. Furthermore, process-oriented and object-oriented scheduling rules are developed as the general guide for scheduling. In order to efficiently simulate and evaluate an AER mission (assisting the decision maker), the simulation system is designed with multiple agents and a user interface, which can quickly load mission settings, run the simulation, and collect data for further evaluation. A standardized mission makespan is adopted as the evaluation index. Based on that, the minimum integrated index can be derived to finally assess the different rescue schemes and choose the best. In the case study, the comparison results indicate that the rescue efficiency of large helicopters (Mi-26 in the case) could be limited by the capabilities of loading points and unloading points. This problem is solved by scheduling small/medium-size helicopters to transfer the personnel. Alternately, two types of helicopters can be used: one for passenger transfer and the other for goods/material transfer. Anyway, the analyses in the case study illustrate the correlation between effectiveness and scheduling, which demonstrates the significance of decision-making. By using the proposed scheduling and modeling methods, the simulation system can be served as a convenient decision-making support tool for practical rescue applications.
1. Introduction
In recent years, frequent floods have occurred in many cities in China, and about 2/3 of China’s land area has been threatened [1,2,3,4]. Since July 2021, flood disasters caused by the rare extreme heavy rainfall have caused more than tens of billions of losses and endangered extensive people’s lives in Henan and Shanxi provinces of China [5]. Different from other disasters, flood disaster usually causes serious asset damage and potentially severe impact on public health with higher frequency. The scale of flood disasters varies from small and medium floods to severe floods. During severe floods, immediate and accurate decision-making enables to approach to effective rescue in reality [6]. In addition, the effectiveness of emergency rescue in flood disasters is closely related to the allocation of rescue resources and the efficiency of rescue missions [7,8].
China’s flood disaster emergency rescue is led by the Ministry of Emergency Management (MEM), with widespread aviation rescue teams from governments and collaborating societies [9,10]. When severe flooding happens, various disaster responders can be deployed for rescue, such as helicopters, troops, and police. The command-and-control center makes decisions and commands using the updated monitor information. In urban flood disasters, the main types of rescue missions include (but are not limited to) transfers of personnel, goods/material, and large equipment, as well as air patrols and monitoring, etc. [11,12].
The lack of reserve plans for an emergency, as well as the destruction of transportation and communication infrastructure, can strongly limit the immediacy and rapidity of emergency rescue implemented by ground forces [13]. Therefore, compared to other responders, aviation emergency rescue (AER) (such as the helicopter) has been paid more attention because of its higher efficiency, faster response, and fewer topographic constraints [14,15]. In the process of flood response, it can improve mission effectiveness and reduce disaster losses by reasonably deploying and scheduling AER forces [16]. The AER force utilizes the aviation techniques and equipment, such as helicopters, to handle emergencies and disasters [17,18,19]. The issue at hand is how to arrange the number, location, and scheduling sequence of helicopters for AER under a known disaster situation.
The evaluation of helicopter AER for flood disasters is highly dependent on subjective decision-making and historical data analysis [20]. However, currently, in many countries/districts, the rescue scenarios for flooding in historical data only involve ground forces and a few helicopters. Therefore, it is significant to prepare for the various potential floods but never happened in history, which is in great need all over the world (especially for developing countries, such as China). In these cases, expert experience and history data would not be enough in decision-making. To this end, one common solution is to establish a virtual flood environment, build scheduling models, and simulate different scenarios. This modeling and simulation (M&S) method has been widely used in emergency rescue, for example, aircraft scheduling [21,22], medical response [23], and response plan [24]. The related literature will be discussed more in the next section.
In the emergency rescue research field, there have been some hot research topics, such as the simulation of the emergency rescue process under different disasters [25,26,27], the optimization of rescue resources and personnel evacuation [28,29], and the analysis of rescue strategies [30]. Though scheduling and strategy optimization has been studied for AER, it may still be hard for these models to quantify the effectiveness under different deployment scenarios and scheduling rules. In contrast, hybrid and hierarchical models are more suitable for the flood-oriented AER because they can integrate the AER processes, scenario details, and the dynamic resource allocation together, thereby allowing for a rapid evaluation of mission effectiveness. Therefore, this study will use hybrid and hierarchical models for the scheduling, simulation, and evaluation of the flood AER.
The present study first proposes a conceptual model of helicopter AER scheduling for flood disasters, which contains the process and objects involved in emergency rescue. More specifically, the model describes the scheduling rules for real situations with two types: process-oriented and object-oriented rules, which fills up the gap of helicopter scheduling in the process of flood AER. In this specific research area, subject-matter experts have noticed some severe problems, (A) flood rescue requires rapid decision-making and quick rescue to reduce potential losses; (B) historical data provide the scenarios of conventional flood rescue, but AER is rarely involved; (C) it is difficult to assess the effectiveness of different scenarios when multiple aircraft are considered. The experiences show that the location and quantity of helicopter deployments and helicopter scheduling rules have a significant impact on rescue effectiveness; However, this aspect may not be addressed by only using the math model construction and classic optimization studies. Due to this, a multi-agent-based simulation system is developed here to cover the helicopter scheduling during the emergency response: from mission scenario construction to mission effectiveness evaluation.
Compared with other kinds of disaster rescue, flood rescue requires more rapid decision-making because of the flood characteristics: unpredictable behavior, dynamic nature, great complexity, high frequency, and potentially severe impact on public health in a large area [31,32,33]. Therefore, floods usually cannot be fully prevented or predicted with high accuracy. For uncertain flooding conditions, an innovative hospital evacuation model was proposed in [6], which can quickly generate the optimal scheduling and sequencing of a hospital evacuation. However, since flooding could paralyze the local ground transportation system [34], AER (such as a helicopter) may become the only rescue manner during the emergency response phase. If different types of helicopters are considered in the AER system, helicopter scheduling will further increase the complexity of decision-making [35]. To address the mission complexity caused by the variety of helicopters and missions, the multiple-agent-based M&S is used, which can smoothly perform the required scheduling functions; Based on that, the helicopter response can be efficiently implemented during the mission operation.
The simulation system performed here is comprised of multiple agents and a user interface. They can simulate key elements, rescue requirements, mission scenarios, rescue helicopter deployment, and the effectiveness evaluation of the whole rescue process. The rescue process encompasses behaviors and interactions of numerous agents. Combined with them, the whole operation would be simulated. In addition, the helicopter scheduling rules are modeled in detail for the interactions with other agents, including the mission allocation and priority, the mission execution process, and helicopter assignment rules.
In order to validate the availability and practicality of the model and simulation system, in the case study, the AER effectiveness of different rescue schemes is evaluated by using the real data from the flood disaster that happened in Wuhan City, Hubei Province in July 2020 [36]. By combining mission scenarios and helicopter scheduling details, multiple virtual rescue operations are performed in every helicopter rescue scheme. It is found that the different schemes perform a large difference in the mission effectiveness, but all of them can be quickly simulated and operated in the developed simulation system. Furthermore, the specific procedures of the virtual experiments are performed in the interface during the simulation. The case study shows that this simulation system can efficiently provide feasible schemes for decision-making in an AER mission. Finally, an effective evaluation method is proposed to choose the best rescue scheme for the case study, which considers different mission types.
In summary, the contributions of the work include: (A) introducing a top-level structure of the conceptual model for helicopter AER scheduling specific for flood rescue (Section 3.1); (B) developing the behavior-based scheduling rules as the general guide for helicopter AER (Section 3.2); (C) developing a multi-agent-based helicopter AER scheduling simulation system for flood based on the conceptual model (Section 4); (D) proposing an evaluation method for effective evaluation and multi-scheme comparison (Section 4.4); (E) validating the feasibility and the rapidity of the simulation, the scheme generation and execution (Section 5).
2. Related Work
This section focuses on the mathematical models and simulation methods studied by other scholars in this research area. Generally, there are two aspects: Mathematical Models and Simulation Methods, for Emergency Rescue. The aims of these studies are mostly to improve the effectiveness of emergency rescue.
2.1. Mathematical Models for Emergency Rescue
Mathematical models for emergency rescue revolve about allocating and scheduling disaster responders based on an optimization process. These include the multi-objective optimization of rescue station selection, the identification of the landing points for rescue helicopters, the spatial optimization of rescue resource deployment, and the data-based risk decision model for flood disasters. For example, Trivedi and Singh [37] presented a hybrid multi-objective decision model for efficiently managing disaster shelter location and relocation projects, but the evacuation of personnel was considered during the post-disaster recovery only, not for the emergency response process. Kroh [38] used a mathematical model and database analysis to select locations that can be used as landing sites for rescue helicopters; however, the applications of this model may be limited to the mountainous environment, not to other scenarios. Yao et al. [39] demonstrated the value of spatial optimization in rescue service management and planning with the proposed bi-objective model. Jäger [40] developed a Bayesian network that can quantitatively give the effect of flood disaster risk reduction measures, while Yazdani et al. [29] investigated mathematical and optimization models to cope with hospital evacuation. These studies were only used for analysis and decision-making in the warning phase of a disaster and did not cover rescue mission requirements and helicopter scheduling.
As a crucial issue in AER, effective and safe real-time scheduling can guarantee the safety of rescue aircraft and improve the efficiency of the emergency rescue [41,42]. Zheng et al. [43] developed a mixed-integer linear programming formulation and identified near-optimal solutions for aircraft transportation missions. Though they considered different sizes/complexities of the mission, the coordination of aircraft scheduling between multiple take-off/landing points were not presented. Miyano et al. [44] proposed a scheduling method of multi-UAV search systems for search during emergencies that considered data processing but the scheduling method is only for search, not applied for rescue. A few studies considered emergency rescue decisions. For example, tactical decisions were added to the resource optimization models, such as the developed optimization model, which combined disaster preparedness and resource allocation [45].
In summary, the hot topics in this area include resource allocation, aircraft scheduling, and risk reduction. Although the literature pays much attention to the facility location and resource allocation decisions based on rescue requirements, the impact of decisions on AER mission effectiveness for the flood was still rarely reported. One of the main reasons is that the flood and its rescue appear with much more uncertainty than other kinds of disaster, especially during the emergency response phase [46]. Moreover, AER activities are hard to undertake because the infrastructure and equipment of the air industry are very expensive. Therefore, this paper proposes a general AER mission requirement model specifically for flood rescue (Section 3). Based on that, in Section 4, a simulation system is designed and built for the evaluation of different schemes. The schemes in the existing studies are only about where and how many aircraft are there in the mission. In contrast, different schemes in our study refer to the different helicopter deployments and different scheduling operations.
2.2. Simulation Methods for Emergency Rescue
As mentioned, to verify the mathematical model and simulate the complex and uncertain emergency rescue process, the M&S method is widely used. The common M&S methods in emergency rescue include discrete event modeling, system dynamics modeling, agent-based simulations, and hybrid simulations [47,48]. Among them, Sun et al. [49] introduced a mission model based on a discrete event-activity flow, which enables the training effectiveness evaluation applicable to general helicopter emergency rescue activities. However, the research only considered a single helicopter, and no mission allocation and information sharing was performed. Links et al. [50] and Pagano et al. [51] developed system dynamics models for predicting post-disaster community function and flood risk reduction, respectively. Although these studies have achieved the construction of conceptual frameworks and system dynamics models for complex missions, they focused on measuring the decision-making capacity of stakeholders, such as communities, rather than the decision-making capacity of rescue schemes or scheduling planning. To reduce casualties during flood evacuation or other emergencies, Vicario et al. [52] and Siyam et al. [53] employed agent-based models due to the ability to simulate individual decision-making and social behavior. Though these three simulation studies seem to provide an excellent way of addressing the general mission complexity, hybrid simulation (i.e., the M&S approach that combines two or more modelling methods) is also needed to seek the accuracy in system performance details at different decision levels. This is because it can be very difficult to model a comprehensive problem of real-world complex systems by using only one modelling method [47,54,55].
For aircraft scheduling, some other simulation systems were studied. For example, Hong et al. [56] proposed simulation-based optimization approaches to minimize the total scheduled time. Liu et al. [57] developed an agent-based simulation system as proof to illustrate the feasibility of aircraft scheduling algorithms. The above studies examined the aircraft scheduling with the takeoff, landing, and maintenance cycles but not for emergency rescue applications. For the emergency rescue, Hu et al. [41] introduced a scheduling model for aircraft trajectory in a medical emergency rescue mission, while Xiong et al. [58] conducted a simulation of helicopter search area planning in maritime search and rescue.
Regarding the response to flood rescue, most of the existing research concentrates on evacuation planning and optimization. For example, Yazdani et al. [6] developed an integrated model for evacuation evaluation that combines a flood simulator. To enhance the efficiency of decision-making, scholars of disaster response [59] proposed a hybrid simulation-optimization approach for optimal strategies under uncertainty. Whereas these papers are specific for disaster rescue using ground transportation systems without AER force.
In terms of helicopter rescue, many studies have been conducted based on simulation methods. For example, Sun et al. [60] proposed a training evaluation model and a virtual scenario mapping method for helicopter emergency rescue based on virtual simulation. Also, Dubois et al. [61] conducted several algorithms and experiment simulations to tackle the issue of resource dispatch over several impacted disaster responders. However, flood rescue involving multiple helicopters was not considered in the above studies. One the possible reasons is that the number of helicopters in rescue missions was reduced to save the computation time for simulation-based optimization. Sadek et al. [62] and Taymourtash et al. [63] focused on flood risk analysis and the interaction between helicopters and the surrounding environment. These papers feature the integrated simulation of multibody systems but do not consider helicopter schedule. To the best knowledge we have, the modeling and simulation in AER have not been fully developed for the applications on helicopter scheduling and effectiveness evaluation in flood disasters, which is the main motivation of this study.
This paper develops a multi-agent simulation system (in Section 4) for flood rescue based on the proposed mission requirement model (in Section 3). As a convenient simulation system of helicopter AER scheduling, this simulation system can achieve fast mission requirement loading, rapid simulation of the rescue process, and efficient evaluation of rescue solutions.
3. Conceptual Model of Helicopter AER Scheduling
Compared with other disasters, such as earthquakes and forest fires, spreading floods are the most hazardous, with increasing frequency and high level of uncertainty [64,65]. Following the initial investigations on flood disaster characteristics and helicopter AER mission requirements, a general model specific to flood rescue is developed here (shown in Figure 1). This section introduces the general model structure and scheduling rules, which should be the top-level guide for the studied flood rescue simulation. They represent the initial and primary requirements of the users of the simulation system. Based on these requirements, in the following section, a multi-agent-based simulation system will be modeled and developed.
As seen from Figure 1, the top-level structure of the conceptual model for flood disasters comprises basic elements and mission requirements (will be given in Section 3.1). Specifically, the basic elements are the conceptual representation of AER functions, while the mission requirements include the mission classification, mission types, flight mode, etc. (introduced in Section 3.1). Anyway, these elements and requirements are summarized following investigations with subject-matter experts in this specific research area. Based on that, two types of rules are proposed as a general guide for schedule in Section 3.2. In particular, scheduling rules consist of process-oriented rules and object-oriented rules. The process-oriented rules are the sequential description of the mission process, while the object-oriented rules include common behaviors performed by helicopters.
3.1. Top-Level Structure of Conceptual Model
In urban flood disasters, the main types of rescue missions include (but are not limited to) transfers of personnel, goods/material, large equipment, air patrols, monitoring, etc. [11,12]. For the simplification and feasibility in modeling, the transfer of large equipment was considered as the transfer of goods/materials in the present study. In addition, air patrols and monitoring were not included because of the complexity of airspace applications and conflicts [66,67,68].
Figure 2 gives the basic elements of the studied conceptual model, including the helicopter, command-and-control center, temporary take-off/landing points, mission demand points, resettlement points, loading points, and unloading points. Based on scheduling rules (introduced below), the command-and-control center is responsible for giving commands to helicopters during the mission. The definitions and functions of the elements are as follows:
- 1.
- Command-and-control center ()
As the centralized controller of AER, the command-and-control center can receive and process the mission information in real-time, such as the location and quantity of transferring personnel and material. Based on the predefined rules, it can also find available helicopters to assign the transfer mission(s).
- 2.
- Temporary take-off/landing point ()
The temporary take-off/landing point is a place or an airport with relief supplies near the disaster location. In the mission scenario, assume that there is one or more , where the required rescue resources, including personnel, goods/material, and large equipment, have been prepared there. It is justified to include this temporary point because usually, there are no available take-off/landing points at the flooded locations, which can affect rescue efficiency and helicopter deployment [69,70]. The rescue helicopters depart from distant navigable airports and first fly to for loading and fuelling, to get ready for scheduling.
- 3.
- Mission demand point ()
The mission demand point is the disaster occurrence location, the target of helicopters, and rescue resources. During the initial phase of rescue, one of the important missions is to drop sand and gravel for flood prevention.
- 4.
- Resettlement point ()
The resettlement point is the safe location where personnel (including the wounded) are transported from . It is worth noting that the space for the helicopters is limited at the , the same with and ; Therefore, if multiple helicopters are arriving at a similar time and there is no space available, they need to be in a queue based on the low-fuel-first-service rule (see Section 3.2).
- 5.
- Helicopter loading point () & unloading point ()
The loading point is the location where personnel, goods/material, and equipment are loaded onto helicopters, while the unloading point is where these supplies are going. In some mission scenarios, loading/unloading points are just the above-mentioned point(s) (temporary, demand, or resettlement), but for some other situations, new places are chosen as the helicopter loading/unloading points, depending on the specific mission requirements. The potential situations are summarized in Table 1.
There are two kinds of missions: (1). personnel transfer; (2). goods/material transfer.
Obviously, the difference between these two categories is whether the load is personnel or goods/material. For the goods/material transfer, and are the same place. Differently, the personnel transfer includes both exporting and importing personnel from . Therefore, the mission types and flight modes differ depending on the mission requirements.
3.2. Scheduling Rules
Scheduling rules are the general guide for AER scheduling. These rules indicate the general and basic functions which should be implemented by the above-mentioned elements in flood rescue. After developing the rules, a simulation system for flood rescue is needed for the mission simulation and the rescue scheme evaluation. The simulation system to be built should follow these rules and implement all corresponding functions. The behavior-based scheduling rules in the present study are divided into two parts: process-oriented scheduling rules and object-oriented scheduling rules. The details of these two parts are given as follows:
- 6.
- Process-oriented scheduling rules
Process-oriented scheduling rules are sequential scheduling rules to directly describe the mission execution process, which focuses on the function and behavior during the mission but does not specify the objects.
Step 1 Use the historical flood disaster data to design a mission scenario, including the disaster location, area, number of people affected, and other information.
Step 2 Deploy rescue helicopters at temporary take-off/landing points near the location where the flood disaster occurs.
Step 3 Confirm rescue missions and priorities.
Based on the mission scenario, extract the assumed rescue demand, and classify the helicopter missions according to Table 1 (in Section 3.1). After confirming the rescue scheme (steps 2 & step 3), the mission priority can be directly assigned by the user (in EXCEL). While setting the value of the mission priority, multiple factors should be considered, such as the climate and weather, the helicopter flight condition, the risk of secondary disasters, the freight volume of personnel or goods/material in the flood disaster scenario, etc. For example, it is more difficult to carry out helicopter rescue at disaster sites in bad weather conditions. Therefore, to include that, it is justified to set a high priority value for such a mission by the user.
Step 4 Choose the available and suitable helicopters.
Check the following aspects to choosing helicopters: mission matches or not, current state, fuel, maximum loads, and time to arrive. Noting that the mission situation may be updated during the whole rescue process (see Step 6) thus, helicopter(s) should be chosen whenever needed.
Step 5 The selected helicopters move to temporary take-off/landing points, loading points, and unloading points to perform rescue missions.
Step 6 Update situation when: (1). freight volume at mission demand points changes; (2). helicopter state switches from ‘available’ to ’busy’ (and vice versa).
Step 7 Rescue missions complete when demanded freight volume is zero.
Step 8 End the simulation when all helicopters return to temporary take-off/landing points.
- 7.
- Object-oriented scheduling rules (shown in Figure 3)
In this paper, the helicopter is the only disaster responder and the most complex element; thus, there is a need to develop detailed requirements for helicopters. In the next section, the Helicopter Agent in the simulation system will be constructed based on these object-oriented rules.
Object-oriented scheduling rules are formed as responder-based rules because the behavior logic of objects (i.e., disaster responders) is the key part of simulating real AER missions. These rules comprise three parts: helicopter state switch, judgment, and flight. The judgments considered consist of the location judgment and take-off/landing/hovering conditions.
Part 1 Helicopter state switch.
The helicopter state is divided into two types: the ‘available’ state and the ‘busy’ state. There are two ‘available’ states, including standby state after being supported at temporary take-off/landing points and mission completion state. There are three ‘busy’ states: mission execution state, being-supported state at temporary take-off/landing points, and course reversal state for refueling. Figure 3 gives the behaviors that lead to the helicopter state switches, from choosing the helicopter to completing this rescue mission. Choosing a helicopter is assigning a specific rescue mission to a suitable helicopter in sequence: receiving support at a designated temporary take-off/landing point, loading at a designated loading point, and unloading at a designated unloading point. Each time the helicopter finishes supporting or unloading, the helicopter state switches from ‘busy’ to ‘available.’ Similarly, the demanded freight volume changes each time when the helicopter completes loading. As the mission progresses, the rules in the following parts can be implemented.
Part 2 Judgement.
- 8.
- Location judgment
When the helicopter selection is completed, the judgment of helicopter location is carried out in turn: (1). whether it is at the temporary take-off/landing point; (2). loading point and unloading point. Then, according to the location judgment results, move or judge take-off/landing/hovering conditions.
- 9.
- Take-off/landing/hovering conditions.
If there is no free take-off area at the temporary take-off/landing points, mission demand points, and resettlement points, helicopters queue up for take-off. The rule of the queue is the take-off weight, i.e., the higher the take-off weight, the higher priority for take-off. If there are no free landing areas or any helicopters performing similar missions, helicopters queue up for landing or hovering according to the percentage of remaining fuel, i.e., the higher remaining fuel, the lower priority for landing or hovering.
Part 3 Flight.
There are only three kinds of destinations for helicopters: temporary take-off/landing point, loading point, and unloading point. The destination should be confirmed before a flight. The take-off/landing/hovering conditions are judged during the flight because the real-time situation of the destination is unknown at the beginning. Mission situation update is implemented after the flight since the freight volume at mission demand points has been changed.
4. Simulation System of Helicopter AER Scheduling
4.1. Simulation System Composition and Structure
Based on the above helicopter AER scheduling model, a multi-agent-based helicopter AER scheduling simulation system is developed, which is comprised of five agents and a user interface (shown in Figure 4). The multiple agents are Controller Agent, Helicopter Agent, and three point-agents: Temporary Take-off/Landing Point Agent, Loading Point Agent, and Unloading Point Agent. These agents correspond to the elements in the conceptual model of Section 3. The simulated information interactions among these model elements are drawn in Figure 5.
As seen in Figure 4, there are ten behaviors (Nos. 1–10) considered for the five agents. Among them, both the Controller Agent and the Helicopter Agent perform six behaviors, i.e., Nos. 1–6 for the controller, while Nos. 3, 5, 7–10 for the helicopter. In contrast, the other three agents are relatively simpler and only perform two behaviors for each, i.e., Nos. 5 and 7 for the temporary take-off/landing point and loading point, while Nos. 5, 8 for the unloading point.
As seen in Figure 5, behaviors can produce information interactions among agents. For example, the mission execution behaviors of the helicopter change the rescue demand. Thus, the new mission information needs to be sent to the controller, who processes the information in real-time. In turn, helicopter behaviors are triggered by these interactions. For example, the judgment of mission execution relies on real-time take-off/landing/hovering conditions at the corresponding points. As the command center, the controller sends information to the helicopter: state, mission, location, performance, and fuel consumption, while the controller sends information to three point-agents: mission information and take-off/landing/hovering conditions.
Generally, the behaviors of the Helicopter Agent are designed directly by the above object-oriented scheduling rules; for example, the behaviors performed by the Helicopter Agent include state transition, judgment, and loading/unloading mission execution. On the other hand, the behaviors of different agents explain the mission execution process based on the above process-oriented scheduling rules; for example, both the Helicopter Agent and the Unloading Point Agent perform the unloading mission. The user interface enables the read-in of mission scenarios, the visualization of helicopter AER, and the output of the simulation effectiveness results for different rescue schemes, which will be discussed in Section 4.3.
4.2. Agent Behavior and Logic
AnyLogic simulation platform has proved to be a powerful tool for the M&S of complex missions [47,48]. The proposed agents are built on AnyLogic to model the above behaviors and logic by using the finite state machine (FSM) concept. The built finite states generally include an entry point, state, transition, and branch. They correspond to the element start, activity, state change, and location/condition judgment, respectively. Among them, the transition indicates a change in the agent’s behavior. When a transition is taken, some specific action is performed, and the agent behavior switches from one to another. Given the uncertainty of the helicopter rescue for flood, the transition would be triggered by the timeout, updated conditions, and received messages. Behavior is activated and changed according to the up-to-date actions and conditions of the helicopters. The behaviors of the five agents and their functions are summarized in Table 2. These behaviors are considered because they are closely linked with each other through the interaction among agents. Moreover, they play an important role in flood rescue.
The Controller Agent performs as a command and schedule center for the AER mission. In the simulation system, it is also the interaction center, receiving and sending messages from/to other agents to perform different tasks in different states. Table 3 shows the agent messages and the implication built into the simulation system. In particular, messages from point-agents are sent by the ground operators at the location in the real rescue. Anyway, Table 4 provides the list of simulation variables and variable settings for the simulation experiment design of helicopter rescue. Based on the agent models and variable settings, the agent messages receiving and sending from/to other agents could be performed. The initial value of the variable is determined by mission scenarios, assumptions, and equipment characteristics. Noting that the variable initialization should be independent of the built simulation models, which means they can be changed according to the specific scenarios and/or helicopter characteristics. For practical use, it is recommended to carefully consider the real situations and set the initial values before the potential simulation runs and the scheme evaluation. Additionally, the agent messages could be varied by the initial values of variables and be measured from the simulation execution. Based on that, different mission scenarios and rescue schemes would be differentiated.
Three kinds of messages are sent by the Controller Agent: start of the simulation, mission allocation, and up-dated situation. Among them, the mission allocation message is sent to the helicopter for the mission execution. And the updated situation message is sent to points to update the rescue demand. The messages sent by the Helicopter Agent include fuel consumption, the start of the mission, state, performance, and location. Except for the start of the mission, all messages are sent to the controller for the helicopter selection. For three point-agents, messages they send constitute the take-off/landing/hovering conditions in the object-oriented scheduling rules and the updated situation in the process-oriented scheduling rules. The initial message is determined by mission scenarios. With the execution of behavior, messages are constantly updated and sent to the controller for processing. Noting that behaviors may repeat during the whole rescue process thus, messages should be updated whenever the behaviors change.
In the following contents, five agents will be discussed in detail with the specific flow chart of logic. In addition, pseudo codes are also provided to better describe the agent models in this simulation system.
4.2.1. Controller Agent
According to the scheduling process and conceptual model of the command-and-control center in Section 3, the Controller Agent was built to process real-time information and send commands for unified resource allocation. All the behaviors of the Controller Agent during the simulation follow the above scheduling rules in the helicopter AER scheduling model. In chronological order, there are six categories of behaviors: mission scenario confirmation, mission priority confirmation, helicopter selection, judgment, situation update, and evaluation. The first five behaviors are contained in agent logic (shown in Figure 6) according to the scheduling rules (in Section 3.2), while the evaluation is carried out through the scheme evaluation interface (will be given in Section 4.3).
Except for the evaluation, there are also behaviors relevant to the user settings. The Controller Agent will load the mission scenarios and priorities after the user prepares the related mission information (in EXCEL). In addition, the user should select helicopters for different rescue schemes beforehand.
4.2.2. Helicopter Agent
As the most complex agent in logic flow, the Helicopter Agent’s behaviors include mission execution, state transition, fuel consumption, situation update, and the judgment of these four behaviors (shown in Figure 7).
Mission execution behavior is divided into three stages: pre-mission, execution process, and post-mission, which confirm different information with the Controller Agent. For example, in the pre-mission stage, messages sent by the Helicopter Agent comprise fuel consumption, state, performance, and location. Based on that, the Controller Agent chooses accessible and suitable helicopters in order of mission priority. Regarding the execution process, helicopters perform loading or unloading missions according to the mission allocation and scheduling rules. In the post-mission stage, the Controller Agent updates the mission allocation in real-time by collecting the same information as the Helicopter Agent in the pre-mission stage.
As mentioned in Section 3.2, the state transition is the switch from ‘available’ to ‘busy’ (and vice versa) after the helicopter is supported and completes the current mission, the state switches from ‘busy’ to ‘available.’ On the other hand, the state switches from ‘available’ to ‘busy’ when performing missions, being supported, and refueling.
Fuel is an important factor in choosing helicopters. Therefore, fuel consumption is also considered in the simulation, including flying, take-off, landing, and hovering. The helicopter can be refueled to full at the temporary point. Helicopter state transitions will update the helicopter situation. The helicopter sends the updated state information to the controller. Therefore, the controller has an up-to-date helicopter situation.
By using the messages delivered between agents, different types of judgments can be made during the mission simulation, including judgments for the rescue mission presence, locations, the remaining fuel, and judgments for meeting take-off/landing/hovering conditions. These judgments are depicted in the flow chart of Figure 7, also presented by the pseudo-code of Helicopter Agent logic.
4.2.3. Other Point-Agents
Apart from the Controller and Helicopter Agent, other agents are all the mission-related point-agents, including the Temporary Take-off/Landing Point Agent, the Loading Point Agent, and the Unloading Point Agent, just to follow the conceptual model elements mentioned. All the above agents need a situation update behavior to change the freight volume at the mission demand point; only in this way the helicopter states and missions can be updated smoothly and the scheduling rules can be correctly performed.
Figure 8 and Figure 9 show the pseudo codes and the flow charts of these point-agents. Generally, in both figures, the mission situation is changed, and the message is sent to the controller at the end of each flow chart. Noting that messages sent by these point-agents, such as updated freight volume and the number of helicopters, are the basis for the controller to dispatch missions.
- Temporary Take-off/Landing Point Agent;
As shown in Table 1, for missions that require importing personnel or goods/material, the temporary take-off/landing point and mission demand point become the loading point and unloading point, respectively. In other words, the loading mission will be performed at the temporary take-off/landing point. After the loading completion, freight volume should be updated at this point. Then, after the corresponding unloading completion, the related mission information should be updated to the controller for the following transportation tasks (shown in Figure 8).
- Loading/Unloading Point Agent.
No matter for which type of mission, the mission demand point would be either the loading point or the unloading point. Therefore, for simplicity, the Loading/Unloading Point-agents can be modeled with the mission execution behavior (shown in Figure 9) and the situation update behavior (shown in Figure 8). When the loading/unloading point and the mission demand point are the same, the updated freight volume information of the mission demand point will change the mission situation.
4.3. User Interface
In order to fast-read mission scenarios and formulate and display different rescue schemes, the user interface is designed and added to the simulation system. Users can set and change the rescue scheme according to the latest flood disaster scenario.
The user interface is comprised of five parts (as shown in Figure 10): mission scenario interface (MSI), helicopter deployment interface (HDI), mission rehearsal interface (MRI), scheme evaluation interface (SEI), and GIS map interface (GISMI). Basically, the simulation system can realize four functions: rapid construction of flood disaster scenarios, helicopter deployment, mission rehearsal, and effectiveness evaluation.
MSI is to load mission scenario database files and to import scenario information into the AnyLogic simulation software. The HDI supports the users to manually set the rescue scheme, for example, selecting the temporary take-off/landing points set in a mission scenario, deploying the corresponding rescue helicopters, and setting the number of helicopters. The MRI is used to conduct scheduling rules with mission scenarios and initialize the Helicopter Agent. The SEI is to evaluate and report the effectiveness of different rescue schemes. Finally, the GISMI is used as a monitor on the map, i.e., it displays the real-time mission execution process and helicopter states.
4.4. Evaluation Method
The evaluation index of helicopter AER here is the standardized mission makespan (ratios), which reflects the overall resource usage efficiency. This paper considers different types of missions and helicopters, which increase the complexity of decision-making. For a more objective and comprehensive evaluation, it is worthy to contain these aspects: time efficiency, resource utilization efficiency, and standard efficiency. More specifically, mission makespan is the average transfer time of multiple helicopters, which represents the time efficiency. Resource utilization efficiency is a percentage that reflects the usage of capacity resources and, more importantly, means cost-effectiveness [71]. Furthermore, an integrated index is calculated from these time results, which is the final objective for the rescue scheme evaluation.
The two types of mission makespan are the average personnel transfer time () and the unit-weight goods/material transfer time (). Due to the delay of coordination, in real applications, it usually takes a longer time (per unit) when more people or goods need to be transferred. Thus, the relationship between the helicopter transfer time and the demanded freight volume should be non-linear. In order to include that, the time-consuming coefficient and the difficulty coefficient are introduced to standardize the helicopter transfer time under different freight volumes at mission demand points. The calculation formulas of the above two coefficients are given as follows, which is a function of the personnel number or the weight of goods/material:
where is the number of personnel, person; is the weight of goods/material, kg.
The helicopter transfer time is calculated as the sum of waiting time (), handover time (), and transfer time (). Tw is the interval between the rescue helicopter receiving transfer command and the rescue helicopter arriving at loading points. is the interval between the rescue helicopter arriving at loading points and loading completed. is the interval between loading completed at loading points and unloading completed at unloading points.
is calculated as the ratio of the sum of the average helicopter transfer time of each sortie to the total number of sorties:
where is the number of personnel transferred in the sortie of personnel transfer missions; is the total number of sorties during performing personnel transfer missions.
Similarly, is calculated as:
where is the weighty of goods/material transferred in the sortie of goods/material transfer mission; m is the number of sorties during performing goods/material transfer missions.
Resource utilization efficiency is the ratio of the total freight volume to the freight capacity. The freight capacity is the sum of the maximum freight volumes that can be carried by all sorties. The two types of resource utilization efficiency are personnel resource utilization efficiency () and the goods/material resource utilization efficiency (). In the real situation, the volume of personnel/goods/material loaded on the helicopter is not necessarily the maximum volume that can be loaded during scheduling. Therefore, it is justified to quantify the cost-effectiveness of different schemes to avoid resource waste in the optimal scheme. is calculated as the total number of personnel transferred by the helicopter divided by the maximum passenger capacity of the helicopter:
where is the maximum number of personnel that can be loaded in the sortie of personnel transfer mission.
Similarly, is calculated as:
where is the maximum weight of goods/materials that can be loaded in the sortie of goods/material transfer mission.
Corresponding to mission makespan, the two types of evaluation index, i.e., standardized mission makespan, are calculated as the ratio of mission makespan and resource utilization efficiency:
where is the standardized average personnel transfer time; is the standardized unit-weight goods/material transfer time.
Lastly, a particular point of the Pareto front in the objective space is selected. The effectiveness evaluation of AER missions is a multi-objective decision problem. Therefore, an integrated index () is introduced to integrate the two types of evaluation index into one [72,73]. The optimal scheme is the one in which the point is the least distant from ideal objectives [74]:
where
is the integrated index; is the standardized, average personnel transfer time of the scheme; is the maximum standardized average personnel transfer time; is the standardized unit-weight goods/material transfer time of the scheme; is the maximum standardized unit-weight goods/material transfer time; is the priority weight and set as 1, which indicates personnel transfer mission and goods/material transfer mission are equally important.
5. Case Study
In order to validate the above simulation system, the case study is given in this section which comprises four parts: mission scenarios, rescue helicopter deployment, simulation validation, and effectiveness evaluation (as shown in Figure 11). The mission-scenario part consists of two types: helicopter AER force scenario and flood disaster scenario, which correspond to the helicopter AER force database and the flood disaster database, respectively. As discussed in Section 4.3, the database files should be manually set by the user and imported through the user interface. The part of rescue helicopter deployment determines multiple schemes based on different types and the quantity of helicopter AER teams. The third part, simulation validation, is the visual simulation of the helicopter AER scheduling model according to the previous two parts. The last part, effectiveness evaluation, is the data analysis of the third part for multi-scheme comparison.
5.1. Mission Scenarios
Mission scenarios include the flood disaster scenario and the helicopter AER force scenario. The flood disaster scenario contains the disaster information, mission types, and mission demand, And the helicopter AER force scenario contains the location and capability of temporary take-off/landing points and the performance of rescue helicopters. The simplified mission scenarios use the data and information from the flood disasters in Hubei Province, China (which happened in July 2020).
5.1.1. Flood Disaster Scenario
During the daytime on July 7th, 2020, the torrential rain in the middle reaches of the Yangtze River led to flood disasters in Wuhan and surrounding areas. The information on disaster locations (Place A, B, and C) and resettlement points (Point D and E) are as follows:
Place A is in Wuhan City. The coordinates are 30.39° N, 114.33° E. 8000 kg of goods and materials are needed; and 200 trapped people, including a critically ill patient, need to be transported out to resettlement point E with coordinates of 30.52° N, 114.23° E.
Place B is also in Wuhan City. The coordinates are 30.58° N, and 114.51° E. The lake near Place B is at risk of a dike break. Since the risk of secondary disasters is very high (usually within 24 h), this mission priority is at the top. 10,000 kg of sand and gravel need to be quickly dispatched for flood control, and a piece of large-scale equipment weighing 8 tons needs to be transported to Place B.
Place C is near the Wuhan City center with coordinates of 30.6° N, 114.03° E. 5000 kg of materials need to be transported here, and 198 trapped people need to be transported to the resettlement point D with coordinates of 30.14° N, 114.64° E.
In addition, 80 people and 2600 kg of materials need to be transported from Point D to Point E. all these five Points are available for one helicopter to take off and land at one time. In this paper, as an example case, the operational information of disaster sites in the flood disaster scenario is given in Table 5, which could be directly assigned and changed by the user. Meanwhile, the information on the disaster scenario is used as the input parameters for the studied simulation validation along with the following information on rescue helicopters and rescue schemes (see Section 5.1.2 and Section 5.2).
5.1.2. Helicopter AER Force Scenario
The surrounding temporary take-off/landing points include the Wuhan Hannan General Aviation Airport, Xiantao Airport, Lishan General Aviation Airport, Jingmen Zhanghe Airport, Jingdezhen Lumeng Airport, Zhuzhou Lusong Airport, and Laiwu Xueye Airport. The information on temporary take-off/landing points and available helicopters are all given in Table 6 and Table 7. Noting that both the person number and the person weight can be used to describe the passenger capacity. The only difference is whether the body weight is multiplied when calculating. Although the person weight factor may be essential for some specific scenarios, in this case, it is equivalent to the person number. In terms of time parameters, they consist of the refueling time, the waiting time, and the handover time. Since the estimation of time parameters may be different in real situations following the expert experience, Table 7 provides an example case of mission scenarios. In the developed simulation system, the Helicopter Agent will load the time parameters after the user prepares the related information (in EXCEL). As given in Table 7, the data on helicopter characteristics are collected from [75,76], and the time parameters are determined through the survey from experts in this research area.
5.2. Rescue Helicopter Deployment
Table 8 gives five rescue schemes, including the location and quantity of different helicopters. The multiple rescue schemes differ in the location and number of large helicopters (Mi-26), as well as the adequacy of small/medium-size helicopters near Wuhan. Different from the other four schemes, the number of helicopters is the largest in Scheme 1, as are the large helicopters.
5.3. Simulation Validation
Based on the above two parts and the simulation system, the simulation validation of the proposed five rescue schemes were carried out. For the Anylogic simulation, the real-time simulation speed can be changed: ×1, ×2, or as fast as possible (virtual time mode). In this simulation case, the simulation system could perform five rescue schemes and the required scheduling functions smoothly. Specifically, the evaluation index, i.e., standardized mission makespan (see Section 4.4), was obtained almost immediately after the simulation (less than 1 s) for each rescue scheme. Regarding the simulation time, it wouldn’t be more than 10 s for each rescue scheme if simulated in virtual time mode. Therefore, the feasibility and the rapidity could be validated through this simulation case.
Due to the uncertainty of agent interaction, the evaluation results of the same rescue scheme are slightly different. Therefore, we performed one hundred simulations for each rescue scheme for the validation and took the mean value as the final result (shown in, Figure 12, Figure 13 and Figure 14). Table 9 presents the results of one certain simulation for Scheme 1, While Table 10 gives the mean values and the standard deviations of simulation results for different rescue schemes. As shown in Table 9, numerous sorties are scheduled for two types of missions. The total time of waiting time (), handover time (), and transfer time () is collected from simulations. Based on the time results and the criterion in Section 4.4, the effectiveness of different schemes is investigated. As shown in Table 10, the standard deviations describe the dispersion of simulation results. Meanwhile, the simulation results include two types: the mission makespan ( and ), the resource utilization efficiency ( and ), and the standardized mission makespan ( and ). The following section observes the results of different rescue schemes and provides analyses of the scheme’s effectiveness.
Figure 12, Figure 13 and Figure 14 show the distribution, mean values, and standard deviations of simulation results. In these figures, the red parts represent the simulation results of the personnel transfer mission, and the blue represents the simulation results of the goods/material transfer mission. Specifically, Figure 12 shows the results of the mission makespan (Tp and Tgm). The shorter the mission makespan, the higher the transfer efficiency. The violin diagram on the left of Figure 12 shows that the distribution of Tp in Scheme 2 is concentrated since 70% of the data are distributed in the interquartile range (i.e., 25% to 75% of the data range after the sample is arranged from small to large). Except for that, the distribution of Tgm in each scheme is uniformly distributed. For example, 60% of Tgm in Scheme 4 is distributed in the interquartile range. Moreover, the standard deviation of the mission makespan of Schemes 3–5 equals or is smaller than 4 min. The median is not much different from the expectation of each scheme. Therefore, there are almost no odd data in the simulation results.
Figure 13 shows the results of the resource utilization efficiency (ηper and ηgm). The resource utilization efficiency reflects the cost of mission execution. The higher the utilization efficiency, the lower the mission cost. The Y-axes represent the resource utilization efficiency. The one on the left is for personnel transfer missions (ηper), and the one on the right is for goods/material transfer missions (ηgm). No matter which scheme, ηgm is lower than ηper because the transfer cost of large equipment is high. Except for Scheme 3, the ranges of data distribution in the other schemes are all small; for example, 70% of ηper in Scheme 1 are distributed in the interquartile range. In addition to Scheme 3, the standard deviations of the resource utilization efficiency for Schemes 1, 2, 4, and 5 are all smaller than 5%. The reason is that helicopters that perform the same mission have roughly similar freight capacity during scheduling.
Lastly, Figure 14 shows the results of the standardized mission makespan ( and ). The standardized mission makespan reflects the effectiveness of the mission after considering the mission efficiency and cost. The shorter the standardized mission makespan, the better. Scheme 2 not only consumes the most , about 40 min/100 kg, but also has the largest standard deviations, about 11 min/100 kg. There are a few samples with a large standardized mission makespan; for example, 20% of exceed the 75% quantile in Scheme 5. of Scheme 4 is generally less than that of other schemes. For the goods/material transfer mission, Scheme 4 consumes the shortest (21.25 min/100 kg) which is close to Scheme 5.
In summary, for the personnel transfer missions, Scheme 4 consumes the shortest time, about 23 min/person; Scheme 1 and Scheme 3 perform similarly, about 25 min/person; Scheme 2 and Scheme 5 cost the longest time, about 27 min/person. For the goods/material transfer missions, Scheme 4 costs the shortest time, about 13 min/100 kg; Scheme 1 and Scheme 5 use a similar time, about 14 min/100 kg; lastly, Scheme 2 has the longest time, about 23 min/100 kg.
In addition, it is worth noting that Scheme 2 and Scheme 5 maximize the use of helicopter loading resources in personnel and goods/material transfer missions, respectively, thereby reducing the standardized mission makespan.
Regardless of the resource utilization efficiency, Scheme 4 performs the best for both the mission makespan and the standardized mission makespan. Although the utilization efficiency of the two types of resources in Scheme 4 is not the highest, it does not affect the mission effectiveness. Therefore, Scheme 4 is chosen as the final optimal design for the studied mission scenarios. The following contents will continue using the integrated index () to quantify the best design selection.
5.4. Effectiveness Evaluation and Analysis
The simulation results of different schemes have been compared in Section 5.3. Based on the two types of the evaluation index ( and ) in the simulation results, the negative integrated index () is calculated to quantify the effectiveness of different schemes, see Equation (10). Table 11 gives value of the above five rescue schemes. The comparisons and the merits of these schemes are as follows:
- 10.
- No matter whether the loading type is personnel or goods/material, Scheme 4 has the shortest mission makespan; while considering resource utilization efficiency, Scheme 2 and Scheme 5 stand out of all the schemes.
- 11.
- In Scheme 1, the number of helicopters is the largest. There are two Mi-26s in Wuhan, also sufficient small/medium-sized helicopters nearby for the scheduling. However, the results show that the effectiveness of the scheme is only in the middle level among all schemes. Since the helicopter number is constrained by the capabilities of loading points and unloading points, the multi-sortie deployment of the large helicopter (Mi-26) may reach the upper limit. Therefore, the helicopter waiting time is increased.
- 12.
- In Scheme 2, the personnel resource utilization efficiency is the highest. During the scheduling process, only small/medium-sized helicopters perform personnel transfer missions, not large helicopters. The results show that scheduling a large helicopter will reduce the resource utilization efficiency for transferring personnel.
- 13.
- In Scheme 3, eight small/medium-sized helicopters (including one Mi-26) are used, but not enough for personnel transfer missions. The total passenger capacity is 28% of the total personnel transfer requirement. Obviously, the results of Scheme 3 have a gap with better solutions.
- 14.
- In Scheme 5, the number of helicopters is the second largest among the five schemes. There is one Mi-26 outside Hubei Province. Also, many small/medium-sized helicopters nearby are dispatched. The results show that personnel transfer costs a long time, but the goods/material transfer is close to the shortest (from Scheme 4). That means Scheme 5 is suitable for the AER needs with goods/material transfer missions. Also, scheduling large helicopters from outside Hubei province has a big impact on mission effectiveness.
- 15.
- The Mi-26 helicopter in Scheme 1 and Scheme 2 is deployed at the Wuhan Hannan General Aviation Airport in Hubei Province. Differently, the Mi-26 helicopter in Scheme 3 and Scheme 4 is deployed at the Jingmen Zhanghe Airport in Hubei Province.
- 16.
- Seen from the results of one certain simulation for Scheme 1 (shown in Table 9), there are some differences in mission makespan for the same mission in various degrees. It could be interpreted that the scheme’s effectiveness is clearly related to the freight volume, the waiting time, the transfer time, and the scheduling sequence.
In summary, Scheme 4 shows superior over the other schemes, which uses fourteen deployed helicopters, including one Mi-26 and thirteen small/medium-sized helicopters. The total freight volume transported consists of 478 people and 33.6 tons of goods and materials (the sum of demands in disaster locations including Places A, B, and C). Therefore, in Scheme 4, adequate helicopters are deployed near the disaster locations, which speeds up the total makespan. Furthermore, helicopters are alternately dispatched to transport people and goods/materials. In the 100 simulations of Scheme 4, an average of 17 sorties are transported for people and 40 sorties for goods/materials.
6. Conclusions and Further Study
For flood rescue, this paper proposes a helicopter AER scheduling conceptual model and develops a helicopter AER scheduling simulation system. In particular, the process-oriented and object-oriented scheduling rules are developed as the general guide for scheduling in the conceptual model. The case study in this paper presents the simulation results of different schemes for flood rescue in Hubei Province, China. Apart from statistical analyses, the scheduling sequence, and the response time of one certain simulation are explained as a scheme example. Moreover, the effectiveness evaluation is provided. The standardized mission makespan is adopted as the evaluation index of the evaluation method for multi-rescue-scheme comparison. The conceptual model and multi-agent-based simulation system can be applied to simulate and evaluate other rescue schemes for other flood disasters by resetting the mission scenarios and helicopter deployment. The conclusions of this paper are as follows:
- This paper enables the quantitative comparison of deployment strategies for different types of helicopters. Comparison results show that, compared with heavy reliance on large helicopters, the balanced deployment of different types of helicopters can help improve mission effectiveness. This provides a counterintuitive reference for the construction of the AER force of the government department.
- This paper also reveals two dominant strategies for helicopter schedule. It can improve resource utilization efficiency when scheduling small/medium-sized helicopters instead of large helicopters to transfer people in object-oriented scheduling. As for process-oriented scheduling, it can improve the scheme’s effectiveness when transferring people and goods/materials alternately.
- The findings of this paper explain the strong correlation between the scheme’s effectiveness and the scheduling procedure. The interpretations of the case study suggest that the scheduling procedures entail variations in the response time and resource utilization efficiency. This demonstrates the significance of decision-making support in AER missions.
- The conceptual model and simulation system can be served as an auxiliary quantitative decision-making tool in evaluating the real rescue schemes of AER for flood disasters. The M&S method proves to be effective for rationality and effectiveness.
Many extensions of this study could be considered for future research. For example, other disaster responders (such as trucks and buses) are not considered, except for helicopters. Therefore, in our future research, a promising direction is flood rescue involving collaboration with helicopters and ground vehicles. Apart from that, future research will consider additional potential effects of some parameters, for example, the limitations of the flight route, multi-variable weather conditions, different loading strategies, and environmental factors around the mission points. These potential effects would be involved in a higher-resolution simulation. It should not only refine the association between flight conditions and evaluation indexes but also apply the Helicopter AER scheduling model and simulation system to various flight/weather/environment scenarios. Another example is more helicopter characteristics will be addressed in rescue mission assignments, such as the take-off/landing time, the performance under different flight conditions, etc. So that it could provide more bases for mission assignments, as well as enable access to the most available and suitable helicopter.
Author Contributions
Conceptual model, Y.X. and X.W.; simulation system, Y.X. and X.W.; case study, Y.X.; writing—original draft preparation, Y.X. and Y.G.; writing—review and editing, Y.G., H.L. and Y.T. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Luo, P.; He, B.; Takara, K.; Xiong, Y.; Nover, D.; Duan, W.; Fukushi, K. Historical assessment of Chinese and Japanese flood management policies and implications for managing future floods. Environ. Sci. Policy 2015, 48, 265–277. [Google Scholar] [CrossRef] [Green Version]
- Chang, M.-S.; Tseng, Y.-L.; Chen, J.-W. A scenario planning approach for the flood emergency logistics preparation problem under uncertainty. Transp. Res. Part E Logist. Transp. Rev. 2007, 43, 737–754. [Google Scholar] [CrossRef]
- Kvočka, D.; Falconer, R.A.; Bray, M. Flood hazard assessment for extreme flood events. Nat. Hazards 2016, 84, 1569–1599. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Zevenbergen, C.; Ma, Y. Urban pluvial flooding and stormwater management: A contemporary review of China’s challenges and “sponge cities” strategy. Environ. Sci. Policy 2018, 80, 132–143. [Google Scholar] [CrossRef]
- Guo, X.; Zhu, A.; Li, Q.; Chen, R. Improving the response to inland flooding. Science 2021, 374, 831–832. [Google Scholar] [CrossRef] [PubMed]
- Yazdani, M.; Mojtahedi, M.; Loosemore, M.; Sanderson, D.; Dixit, V. An integrated decision model for managing hospital evacuation in response to an extreme flood event: A case study of the Hawkesbury-Nepean River, NSW, Australia. Saf. Sci. 2022, 155, 105867. [Google Scholar] [CrossRef]
- Hasan, M.M.; Rahman, M.A.; Sedigh, A.; Khasanah, A.U.; Asyhari, A.T.; Tao, H.; Bakar, S.A. Search and rescue operation in flooded areas: A survey on emerging sensor networking-enabled IoT-oriented technologies and applications. Cogn. Syst. Res. 2021, 67, 104–123. [Google Scholar] [CrossRef]
- Cui, P.; Peng, J.; Shi, P.; Tang, H.; Ouyang, C.; Zou, Q.; Liu, L.; Li, C.; Lei, Y. Scientific challenges of research on natural hazards and disaster risk. Geogr. Sustain. 2021, 2, 216–223. [Google Scholar] [CrossRef]
- Wu, Q.; Han, J.; Lei, C.; Ding, W.; Li, B.; Zhang, L. The challenges and countermeasures in emergency management after the establishment of the ministry of emergency management of China: A case study. Int. J. Disaster Risk Reduct. 2021, 55, 102075. [Google Scholar] [CrossRef]
- Van Tilburg, C.J.W.; Medicine, E. First report of using portable unmanned aircraft systems (drones) for search and rescue. Wilderness Environ. Med. 2017, 28, 116–118. [Google Scholar] [CrossRef]
- Kharazi, B.A.; Behzadan, A.H.J.C. Flood depth mapping in street photos with image processing and deep neural networks. Comput. Environ. Urban Syst. 2021, 88, 101628. [Google Scholar] [CrossRef]
- Hildmann, H.; Kovacs, E.J.D. Using unmanned aerial vehicles (UAVs) as mobile sensing platforms (MSPs) for disaster response, civil security and public safety. Drones 2019, 3, 59. [Google Scholar] [CrossRef] [Green Version]
- Bai, V.J. Emergency management in China. Comp. Emerg. Manag. 2014, 6. [Google Scholar]
- Xia, Z.-H.; Pan, W.-J.; Lin, R.-C.; Chen, T. Research on efficiency of aviation emergency rescue under major disasters. Comput. Eng. Des. 2012, 33, 1251–1256. [Google Scholar]
- Chen, X.; Liu, H.; Bai, J.; Wu, Z. Evaluation model of simulation based training for helicopter emergency rescue mission. Int. J. Multimed. Ubiquitous Eng. 2015, 10, 69–80. [Google Scholar] [CrossRef]
- Graham, M. Flood prevention and recovery. In Disaster Management for Libraries and Archives; Routledge: London, UK, 2017; pp. 112–133. [Google Scholar]
- Zhang, M.; Yu, H.; Yu, J.; Zhang, Y. Dispatching plan based on route optimization model considering random wind for aviation emergency rescue. Math. Probl. Eng. 2016, 2016, 1395701. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Hu, D.-h.; Tan, N. Construction of command system of emergency logistics. In Proceedings of the 2009 International Conference on Information Management, Innovation Management and Industrial Engineering, Xi’an, China, 26–27 December 2009. [Google Scholar]
- Grissom, C.K.; Thomas, F.; James, B.J. Medical helicopters in wilderness search and rescue operations. Air Med. J. 2006, 25, 18–25. [Google Scholar] [CrossRef]
- Poussin, J.K.; Botzen, W.W.; Aerts, J.C. Effectiveness of flood damage mitigation measures: Empirical evidence from French flood disasters. Glob. Environ. Chang. 2015, 31, 74–84. [Google Scholar] [CrossRef]
- Radmanesh, M.; Sharma, B.; Kumar, M.; French, D. PDE solution to UAV/UGV trajectory planning problem by spatio-temporal estimation during wildfires. Chin. J. Aeronaut. 2021, 34, 601–616. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Su, X.; Peng, H.; Zhao, X.; Lu, C. A review on carrier aircraft dispatch path planning and control on deck. Chin. J. Aeronaut. 2020, 33, 3039–3057. [Google Scholar]
- Bae, J.W.; Shin, K.; Lee, H.-R.; Lee, H.J.; Lee, T.; Kim, C.H.; Cha, W.-C.; Kim, G.W.; Moon, I.-C. Evaluation of disaster response system using agent-based model with geospatial and medical details. IEEE Trans. Syst. Man Cybern. Syst. 2017, 48, 1454–1469. [Google Scholar] [CrossRef]
- Liu, H.; Chen, Z.; Tian, Y.; Wang, B.; Ynag, H.; Wu, G. Evaluation method for helicopter maritime search and rescue response plan with uncertainty. Chin. J. Aeronaut. 2021, 34, 493–507. [Google Scholar]
- Sproull, M. Modeling of Mass Casualty Management during a Radiological or Nuclear Event. Ph.D. Thesis, George Mason University, Fairfax, VA, USA, 2022. [Google Scholar]
- Chen, P.; Zhang, J.; Sun, Y. Research on emergency rescue of urban flood disaster based on wargame simulation. J. Indian Soc. Remote Sens. 2018, 46, 1677–1687. [Google Scholar] [CrossRef] [Green Version]
- Naboureh, A.; Feizizadeh, B.; Naboureh, A.; Bian, J.; Blaschke, T.; Ghorbanzadeh, O.; Moharrami, M. Traffic accident spatial simulation modeling for planning of road emergency services. ISPRS Int. J. Geo-Inf. 2019, 8, 371. [Google Scholar] [CrossRef]
- Repoussis, P.P.; Paraskevopoulos, D.C.; Vazacopoulos, A.; Hupert, N. Optimizing emergency preparedness and resource utilization in mass-casualty incidents. Eur. J. Oper. Res. 2016, 255, 531–544. [Google Scholar] [CrossRef] [Green Version]
- Yazdani, M.; Mojtahedi, M.; Loosemore, M.; Sanderson, D. A modelling framework to design an evacuation support system for healthcare infrastructures in response to major flood events. Prog. Disaster Sci. 2022, 13, 100218. [Google Scholar] [CrossRef]
- Li, T.; Li, Z.; Zhao, W.; Li, X.; Zhu, X.; Pan, S.; Feng, C.; Zhao, Y.; Jia, L.; Li, J. Analysis of medical rescue strategies based on a rough set and genetic algorithm: A disaster classification perspective. Int. J. Disaster Risk Reduct. 2020, 42, 101325. [Google Scholar] [CrossRef]
- Kettner, A.; Schumann, G.; Tellman, B.J.E. The push toward local flood risk assessment at a global scale. Eos 2019, 100. [Google Scholar] [CrossRef]
- Lee, Y.-Y.; Park, H.-J.; Oh, S.-C. A Study on the Development of Urban Internal Waters Flooding Visualization System Using Unreal Engine. In Proceedings of the 40th Asian Conference on Remote Sensing, Daejeon, Republic of Korea, 14–18 October 2019. [Google Scholar]
- Hu, R.; Fang, F.; Pain, C.; Navon, I.M. Rapid spatio-temporal flood prediction and uncertainty quantification using a deep learning method. J. Hydrol. 2019, 575, 911–920. [Google Scholar] [CrossRef]
- Abdulla, B.; Kiaghadi, A.; Rifai, H.S.; Birgisson, B. Characterization of vulnerability of road networks to fluvial flooding using SIS network diffusion model. J. Infrastruct. Preserv. Resil. 2020, 1, 6. [Google Scholar] [CrossRef] [Green Version]
- Xu, G.; Wang, J.; Huang, G.Q.; Chen, C.-H. Data-driven resilient fleet management for cloud asset-enabled urban flood control. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1827–1838. [Google Scholar] [CrossRef]
- Volonté, A.; Muetzelfeldt, M.; Schiemann, R.; Turner, A.G.; Klingman, N. Magnitude, scale, and dynamics of the 2020 mei-yu rains and floods over China. Adv. Atmos. Sci. 2021, 38, 2082–2096. [Google Scholar] [CrossRef]
- Trivedi, A.; Singh, A.J. A hybrid multi-objective decision model for emergency shelter location-relocation projects using fuzzy analytic hierarchy process and goal programming approach. Int. J. Proj. Manag. 2017, 35, 827–840. [Google Scholar] [CrossRef]
- Kroh, P.J. Identification of landing sites for rescue helicopters in mountains with use of Geographic Information Systems. J. Mt. Sci. 2020, 17, 261–270. [Google Scholar] [CrossRef]
- Yao, J.; Zhang, X.; Murray, A.T. Location optimization of urban fire stations: Access and service coverage. Comput. Environ. Urban Syst. 2019, 73, 184–190. [Google Scholar] [CrossRef]
- Jäger, W.; Christie, E.; Hanea, A.; Heijer, C.; Spencer, T. A Bayesian network approach for coastal risk analysis and decision making. Coast. Eng. 2018, 134, 48–61. [Google Scholar] [CrossRef] [Green Version]
- Hu, B.; Pan, F.; Wang, L.J. A scheduling algorithm for medical emergency rescue aircraft trajectory based on hybrid estimation and intent inference. J. Comb. Optim. 2019, 37, 40–61. [Google Scholar] [CrossRef]
- Guitart, A.; Delahaye, D.; Feron, E. An Accelerated Dual Fast Marching Tree Applied to Emergency Geometric Trajectory Generation. Aerospace 2022, 9, 180. [Google Scholar] [CrossRef]
- Zheng, S.; Yang, Z.; He, Z.; Wang, N.; Chu, C.; Yu, H. Hybrid simulated annealing and reduced variable neighbourhood search for an aircraft scheduling and parking problem. Int. J. Prod. Res. 2020, 58, 2626–2646. [Google Scholar] [CrossRef]
- Miyano, K.; Shinkuma, R.; Mandayam, N.B.; Sato, T.; Oki, E. Utility based scheduling for multi-UAV search systems in disaster-hit areas. IEEE Access 2019, 7, 26810–26820. [Google Scholar] [CrossRef]
- Rodríguez-Espíndola, O.; Albores, P.; Brewster, C.J. Disaster preparedness in humanitarian logistics: A collaborative approach for resource management in floods. Eur. J. Oper. Res. 2018, 264, 978–993. [Google Scholar] [CrossRef] [Green Version]
- Cai, T.; Li, X.; Ding, X.; Wang, J.; Zhan, J. Flood risk assessment based on hydrodynamic model and fuzzy comprehensive evaluation with GIS technique. Int. J. Disaster Risk Reduct. 2019, 35, 101077. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, H.; Luo, M.; Huang, J. Non-uniform hybrid strategy for architecting and modeling flight vehicle focused system-of-systems operations. Chin. J. Aeronaut. 2016, 29, 160–172. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Liu, H.; Tian, Y. Inverse design of mission success space for combat aircraft contribution evaluation. Chin. J. Aeronaut. 2020, 33, 2189–2203. [Google Scholar]
- Sun, X.; Liu, H.; Wu, G.; Zhou, Y. Training effectiveness evaluation of helicopter emergency relief based on virtual simulation. Chin. J. Aeronaut. 2018, 31, 2000–2012. [Google Scholar]
- Links, J.M.; Schwartz, B.S.; Lin, S.; Kanarek, N.; Mitrani-Reiser, J.; Sell, T.; Watson, C.; Ward, D.; Slemp, C.; Burhans, R.; et al. COPEWELL: A conceptual framework and system dynamics model for predicting community functioning and resilience after disasters. Disaster Med. Public Health Prep. 2018, 12, 127–137. [Google Scholar] [CrossRef]
- Pagano, A.; Pluchinotta, I.; Pengal, P.; Cokan, B.; Giordano, R. Engaging stakeholders in the assessment of NBS effectiveness in flood risk reduction: A participatory System Dynamics Model for benefits and co-benefits evaluation. Sci. Total Environ. 2019, 690, 543–555. [Google Scholar] [CrossRef]
- Alonso Vicario, S.; Mazzoleni, M.; Bhamidipati, S.; Gharesifard, M.; Ridolfi, E.; Pandolfo, C.; Alfonso, L. Unravelling the influence of human behaviour on reducing casualties during flood evacuation. Hydrol. Sci. J. 2020, 65, 2359–2375. [Google Scholar] [CrossRef]
- Siyam, N.; Alqaryouti, O.; Abdallah, S. Research issues in agent-based simulation for pedestrians evacuation. IEEE Access 2019, 8, 134435–134455. [Google Scholar] [CrossRef]
- Olave-Rojas, D.; Nickel, S.J. Modeling a pre-hospital emergency medical service using hybrid simulation and a machine learning approach. Simul. Model. Pract. Theory 2021, 109, 102302. [Google Scholar] [CrossRef]
- Brailsford, S.C.; Eldabi, T.; Kunc, M.; Mustafee, N.; Osorio, A.F. Hybrid simulation modelling in operational research: A state-of-the-art review. Eur. J. Oper. Res. 2019, 278, 721–737. [Google Scholar] [CrossRef]
- Hong, Y.; Cho, N.; Kim, Y.; Choi, B. Multiobjective optimization for aircraft arrival sequencing and scheduling. J. Air Transp. 2017, 25, 115–122. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, T.; Zhang, H.; Cheutet, V.; Shen, G. The design and simulation of an autonomous system for aircraft maintenance scheduling. Comput. Ind. Eng. 2019, 137, 106041. [Google Scholar] [CrossRef] [Green Version]
- Xiong, P.; Liu, H.; Tian, Y.; Chen, Z.; Wang, B.; Yang, H. Helicopter maritime search area planning based on a minimum bounding rectangle and K-means clustering. Chin. J. Aeronaut. 2021, 34, 554–562. [Google Scholar] [CrossRef]
- Yazdani, M.; Mojtahedi, M.; Loosemore, M. Enhancing evacuation response to extreme weather disasters using public transportation systems: A novel simheuristic approach. J. Comput. Des. Eng. 2020, 7, 195–210. [Google Scholar] [CrossRef]
- Sun, X.; Liu, H.; Tian, Y.; Wu, G.; Gao, Y. Team effectiveness evaluation and virtual reality scenario mapping model for helicopter emergency rescue. Chin. J. Aeronaut. 2020, 33, 3306–3317. [Google Scholar]
- Dubois, F.; Renaud-Goud, P.; Stolf, P. Capacitated Vehicle Routing Problem Under Deadlines: An Application to Flooding Crisis. IEEE Access 2022, 10, 45629–45642. [Google Scholar] [CrossRef]
- Sadek, M.; Li, X. Low-cost solution for assessment of urban flash flood impacts using sentinel-2 satellite images and fuzzy analytic hierarchy process: A case study of ras ghareb city, Egypt. Adv. Civ. Eng. 2019, 2019, 2561215. [Google Scholar] [CrossRef] [Green Version]
- Taymourtash, N.; Zagaglia, D.; Zanotti, A.; Muscarello, V.; Gibertini, G.; Quaranta, G. Experimental study of a helicopter model in shipboard operations. Aerosp. Sci. Technol. 2021, 115, 106774. [Google Scholar] [CrossRef]
- Pourghasemi, H.R.; Amiri, M.; Edalat, M.; Ahrari, A.H.; Panahi, M.; Sadhasivam, N.; Lee, S. Assessment of urban infrastructures exposed to flood using susceptibility map and Google Earth Engine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 1923–1937. [Google Scholar] [CrossRef]
- Mishra, A.; Alnahit, A.; Campbell, B. Impact of land uses, drought, flood, wildfire, and cascading events on water quality and microbial communities: A review and analysis. J. Hydrol. 2021, 596, 125707. [Google Scholar] [CrossRef]
- Bauranov, A.; Rakas, J. Designing airspace for urban air mobility: A review of concepts and approaches. Prog. Aerosp. Sci. 2021, 125, 100726. [Google Scholar] [CrossRef]
- Xu, C.; Liao, X.; Tan, J.; Ye, H.; Lu, H. Recent research progress of unmanned aerial vehicle regulation policies and technologies in urban low altitude. IEEE Access 2020, 8, 74175–74194. [Google Scholar] [CrossRef]
- Sui, D.; Liu, K.; Li, Q. Dynamic Prediction of Air Traffic Situation in Large-Scale Airspace. Aerospace 2022, 9, 568. [Google Scholar] [CrossRef]
- Jin, W.; Yang, J.; Fang, Y.; Feng, W. Research on Application and Deployment of UAV in Emergency Response. In Proceedings of the 2020 IEEE 10th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 17–19 July 2020. [Google Scholar]
- Van Geffen, G.-J.; Spoelder, E.J.; Tijben, A.; Slagt, C. An Approved Landing Site (ALS) improves the logistics of interhospital transfer of critically ill patients by helicopter. Scand. J. Trauma Resusc. Emerg. Med. 2021, 29, 111. [Google Scholar] [CrossRef]
- Chao, C.-C.; Li, R.-G. Effects of cargo types and load efficiency on airline cargo revenues. J. Air Transp. Manag. 2017, 61, 26–33. [Google Scholar] [CrossRef]
- Gao, Y.; Tian, Y.; Liu, H.; Sun, X. Gaussian fitting based optimal design of aircraft mission success space using multi-objective genetic algorithm. Chin. J. Aeronaut. 2020, 33, 3318–3330. [Google Scholar]
- Gomez, V.; Gomez, N.; Rodas, J.; Paiva, E.; Saad, M.; Gregor, R. Pareto optimal pid tuning for Px4-Based unmanned aerial vehicles by using a multi-objective particle swarm optimization algorithm. Aerospace 2020, 7, 71. [Google Scholar] [CrossRef]
- Gao, Y.; Cheong, B.; Bozhko, S.; Wheeler, P.; Gerada, C.; Yang, T. Surrogate role of machine learning in motor-drive optimization for more-electric aircraft applications. Chin. J. Aeronaut. 2022, in press. [Google Scholar] [CrossRef]
- Vertipedia. Search for Aircraft in Vertical Flight. Available online: https://vertipedia.vtol.org (accessed on 1 May 2022).
- Wiki. Wikipedia. Available online: www.wikipedia.org (accessed on 1 May 2022).
Figure 1.
The systematic framework of a conceptual model for flood disaster.

Figure 2.
Elements of helicopter AER scheduling model for flood disaster.
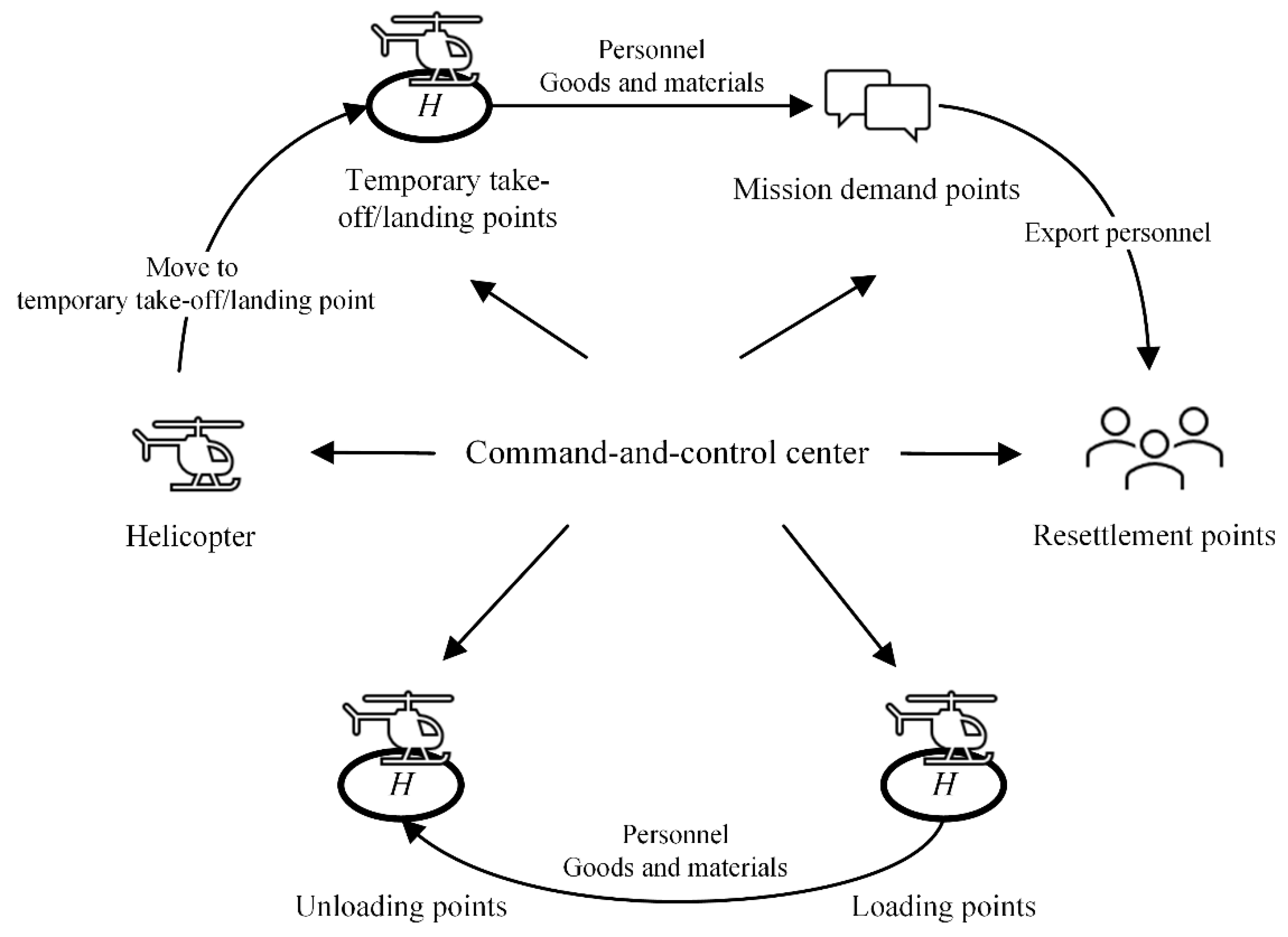
Figure 3.
Object-oriented scheduling rules.

Figure 4.
The hierarchical structure of the helicopter AER scheduling simulation system.
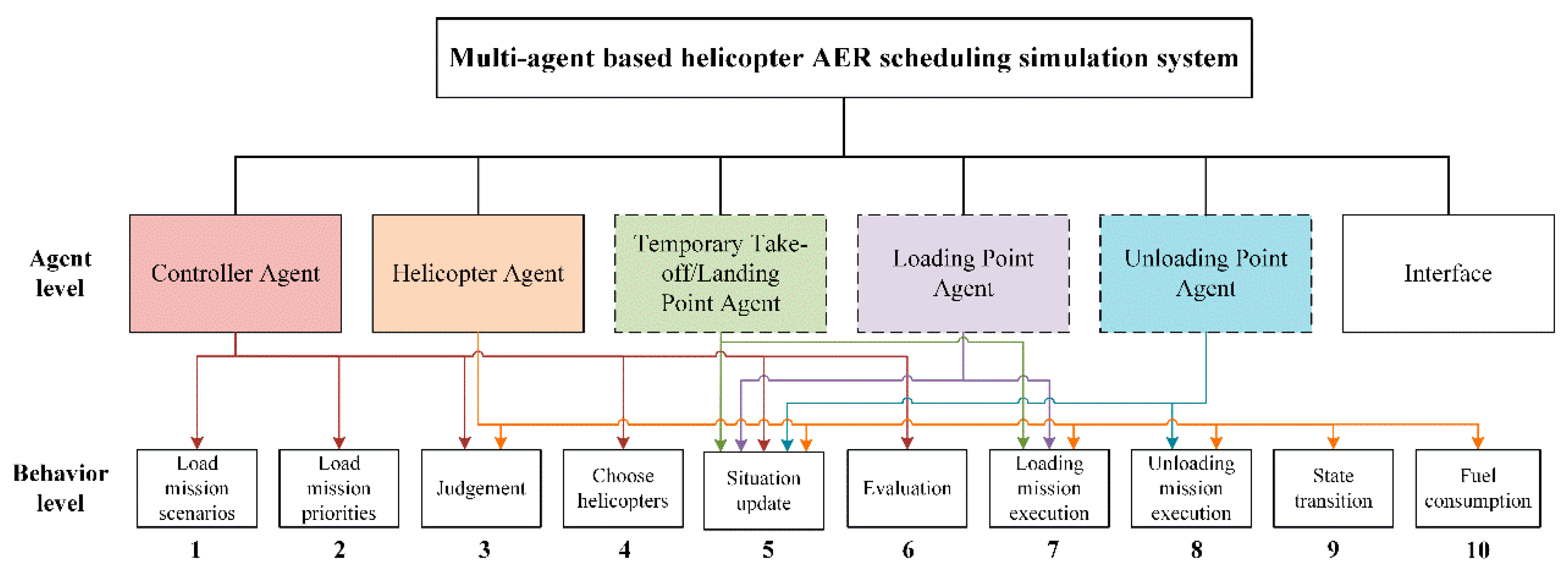
Figure 5.
Interactions between agents.
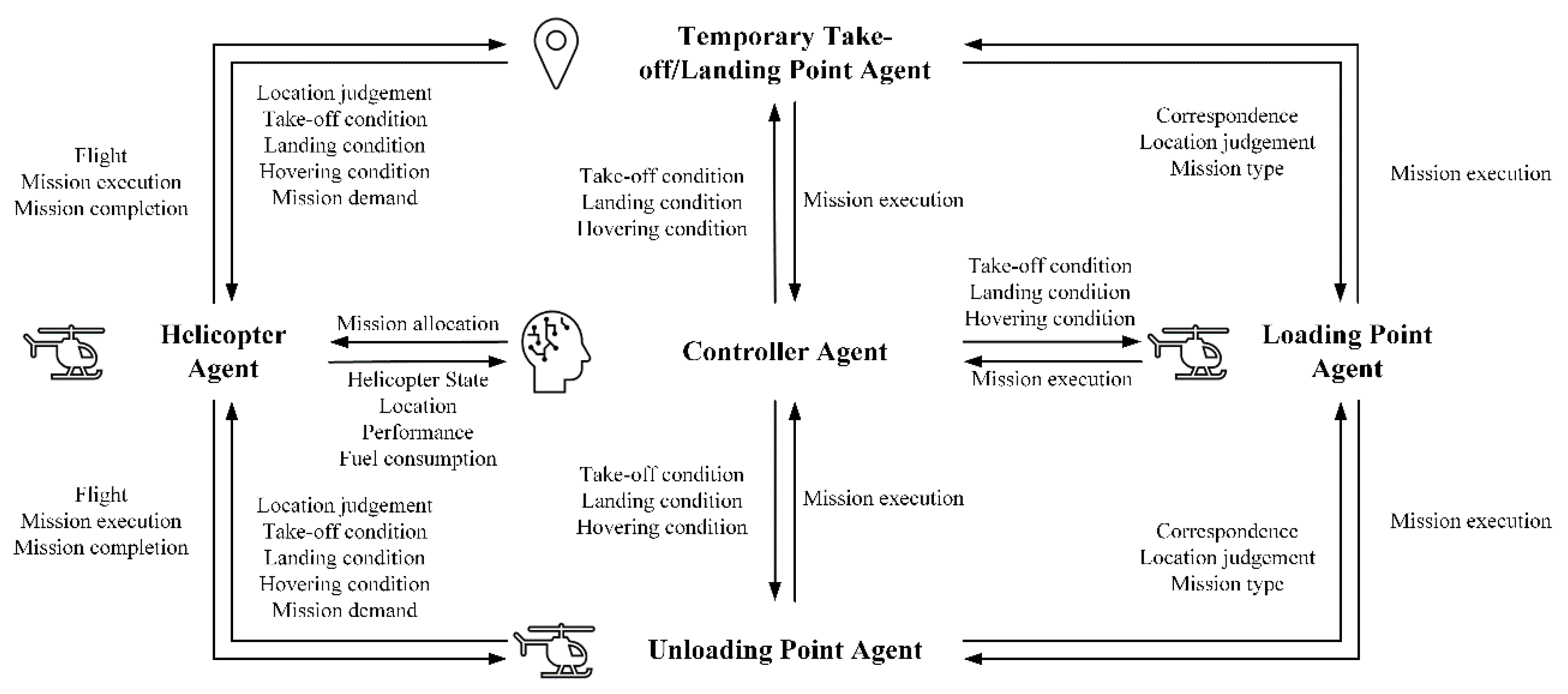
Figure 6.
Controller agent logic. Left: the pseudo-code of the Controller Agent. Right: the flow chart of the Controller Agent logic.
Figure 6.
Controller agent logic. Left: the pseudo-code of the Controller Agent. Right: the flow chart of the Controller Agent logic.

Figure 7.
Helicopter agent logic. Left: the pseudo-code of the Helicopter Agent. Right: the flow chart of the Helicopter Agent logic.
Figure 7.
Helicopter agent logic. Left: the pseudo-code of the Helicopter Agent. Right: the flow chart of the Helicopter Agent logic.

Figure 8.
Situation update logic of Temporary Take-off/Landing Point-agent, Loading Point-agent, and Unloading Point-agent. Left: the pseudo-code of situation update. Right: the flow chart of the situation update.
Figure 8.
Situation update logic of Temporary Take-off/Landing Point-agent, Loading Point-agent, and Unloading Point-agent. Left: the pseudo-code of situation update. Right: the flow chart of the situation update.
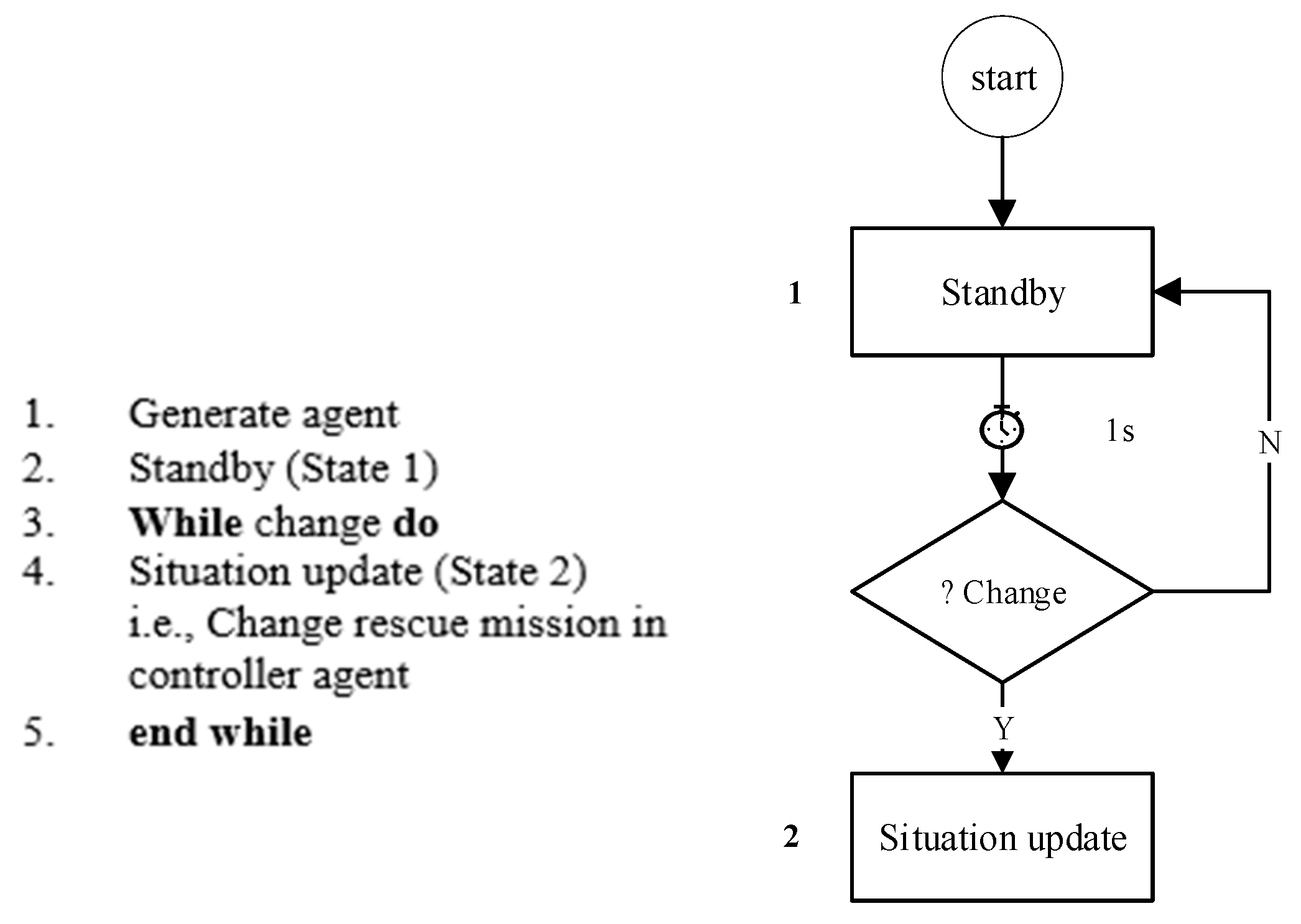
Figure 9.
Mission execution logic of Loading Point-agent and Unloading Point-agent. Left: the pseudo-code of mission execution. Right: the flow chart of mission execution.
Figure 9.
Mission execution logic of Loading Point-agent and Unloading Point-agent. Left: the pseudo-code of mission execution. Right: the flow chart of mission execution.
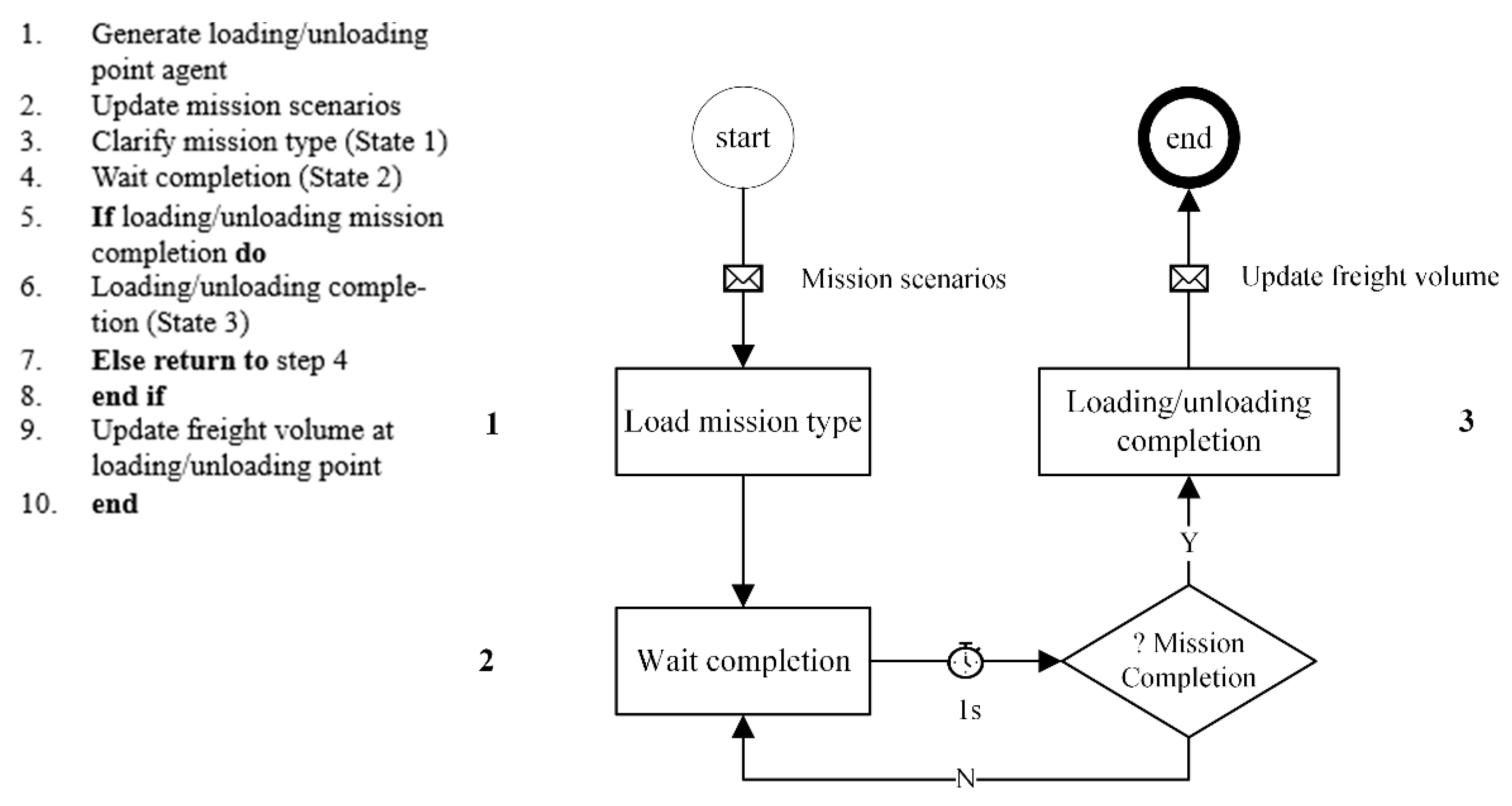
Figure 10.
The user interface of Helicopter AER scheduling simulation system.
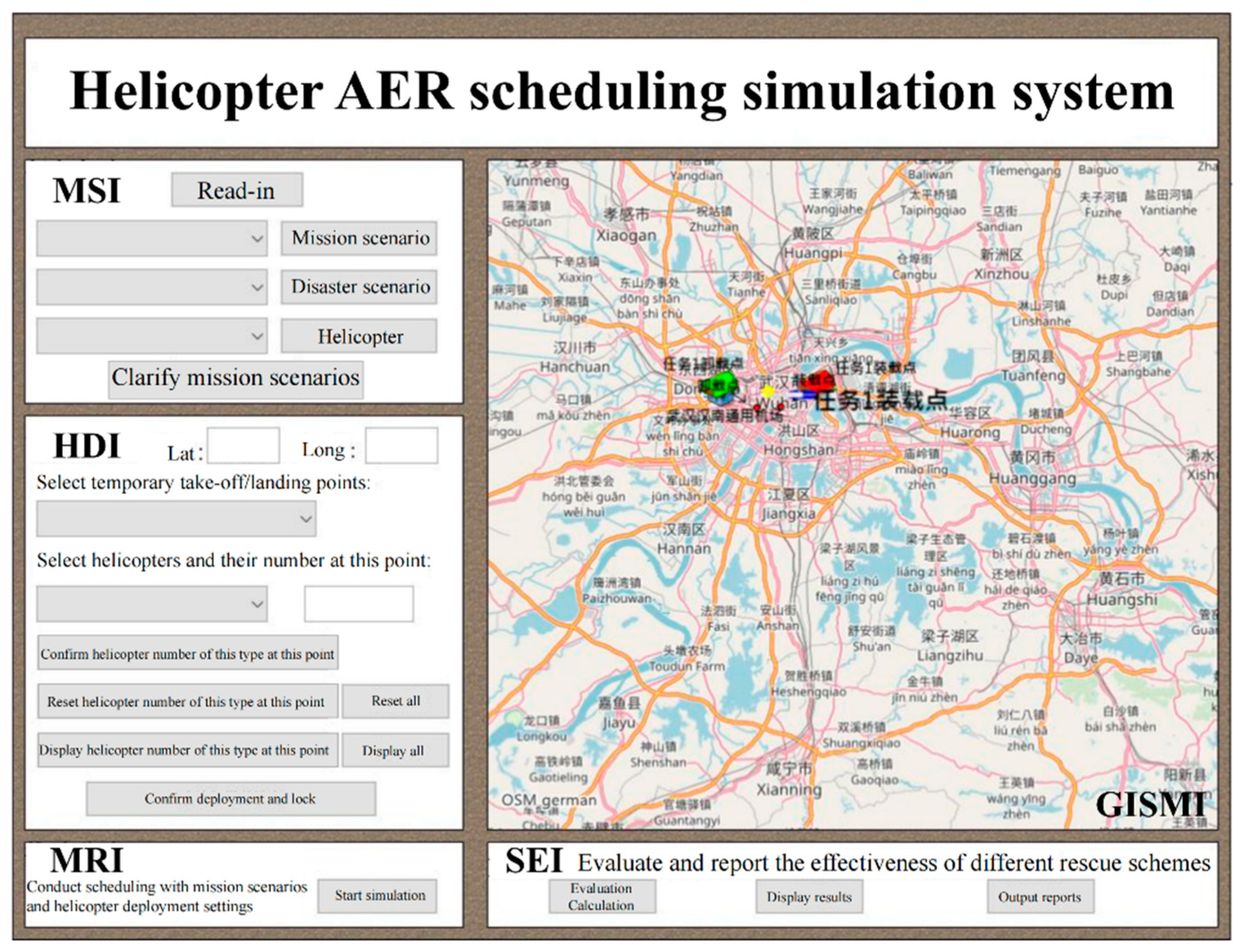
Figure 11.
The framework of the case study. LCD is a location and capability database. RHID is a rescue helicopter information database. FID is a flight information database. DMD is a database of the latitude and longitude of disaster sites and mission demand. LPCD is a capability database of loading points. UPCD is a capability database of unloading points.
Figure 11.
The framework of the case study. LCD is a location and capability database. RHID is a rescue helicopter information database. FID is a flight information database. DMD is a database of the latitude and longitude of disaster sites and mission demand. LPCD is a capability database of loading points. UPCD is a capability database of unloading points.
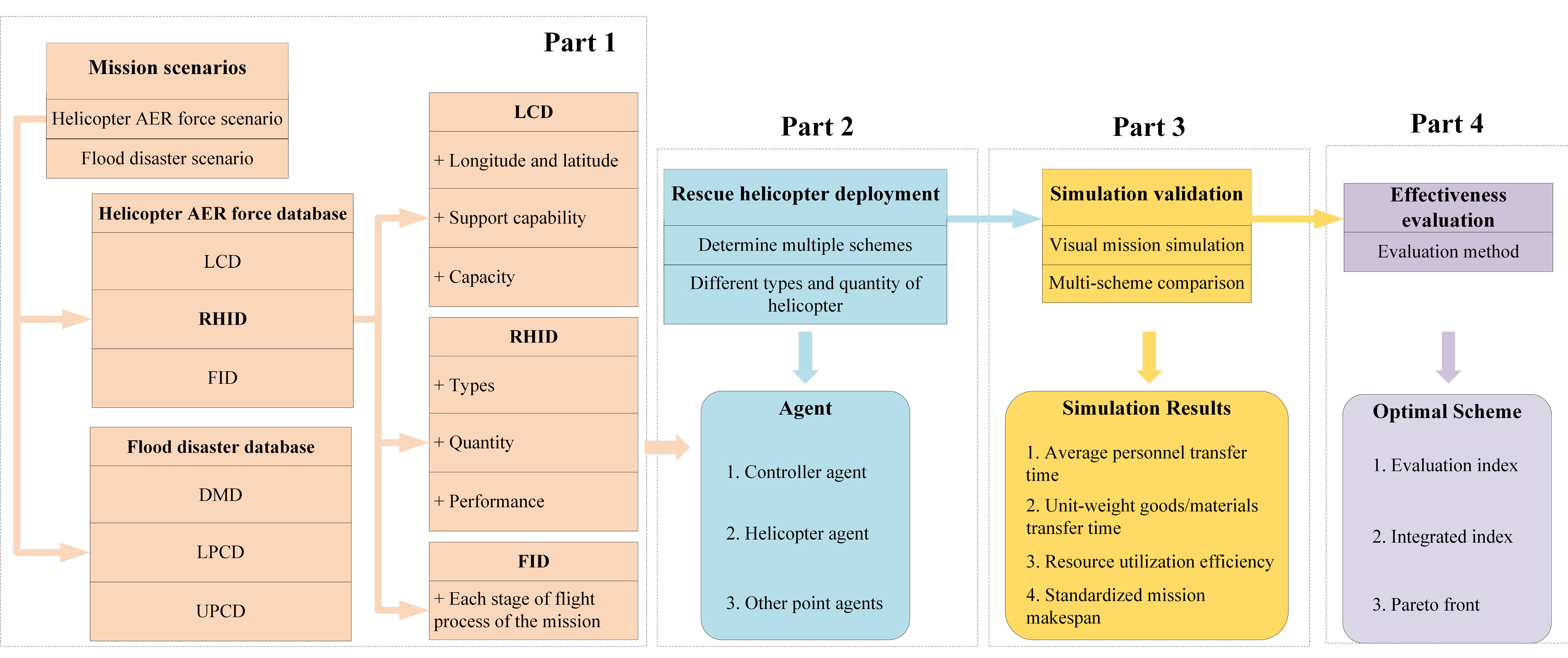
Figure 12.
The distribution, mean values, and standard deviations of mission makespan for different schemes. Left: the violin diagrams show the data distributions of Scheme 1 to 5 from left to right. Right: the descriptive statistics of Scheme 1 to 5 from left to right.
Figure 12.
The distribution, mean values, and standard deviations of mission makespan for different schemes. Left: the violin diagrams show the data distributions of Scheme 1 to 5 from left to right. Right: the descriptive statistics of Scheme 1 to 5 from left to right.

Figure 13.
The distribution, mean values, and standard deviations of resource utilization efficiency for different schemes. Left: the violin diagrams show the data distributions of Scheme 1 to 5 from left to right. Right: the descriptive statistics of Scheme 1 to 5 from left to right.
Figure 13.
The distribution, mean values, and standard deviations of resource utilization efficiency for different schemes. Left: the violin diagrams show the data distributions of Scheme 1 to 5 from left to right. Right: the descriptive statistics of Scheme 1 to 5 from left to right.

Figure 14.
The distribution, mean values, and standard deviations of standardized mission makespan for different schemes. Left: the violin diagrams show the data distributions of Scheme 1 to 5 from left to right. Right: the descriptive statistics of Scheme 1 to 5 from left to right.
Figure 14.
The distribution, mean values, and standard deviations of standardized mission makespan for different schemes. Left: the violin diagrams show the data distributions of Scheme 1 to 5 from left to right. Right: the descriptive statistics of Scheme 1 to 5 from left to right.
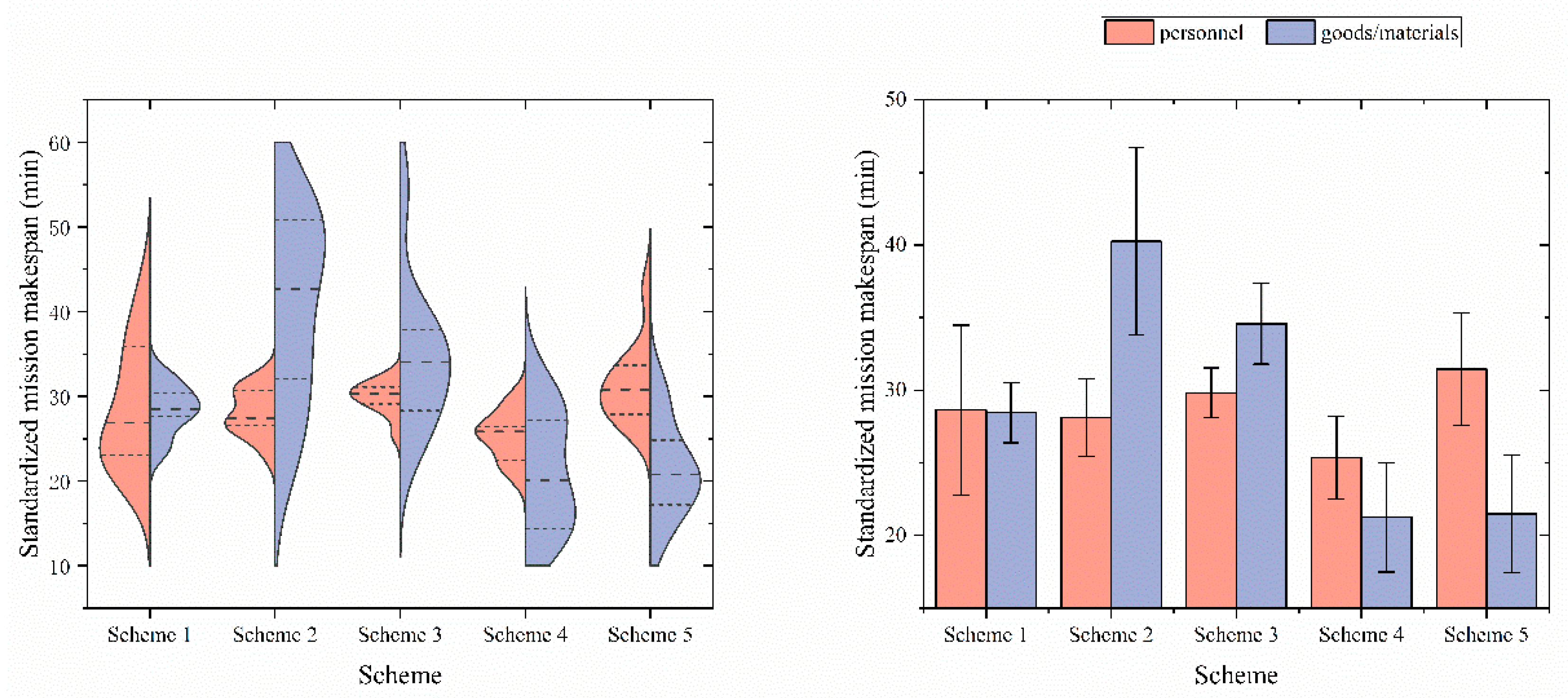

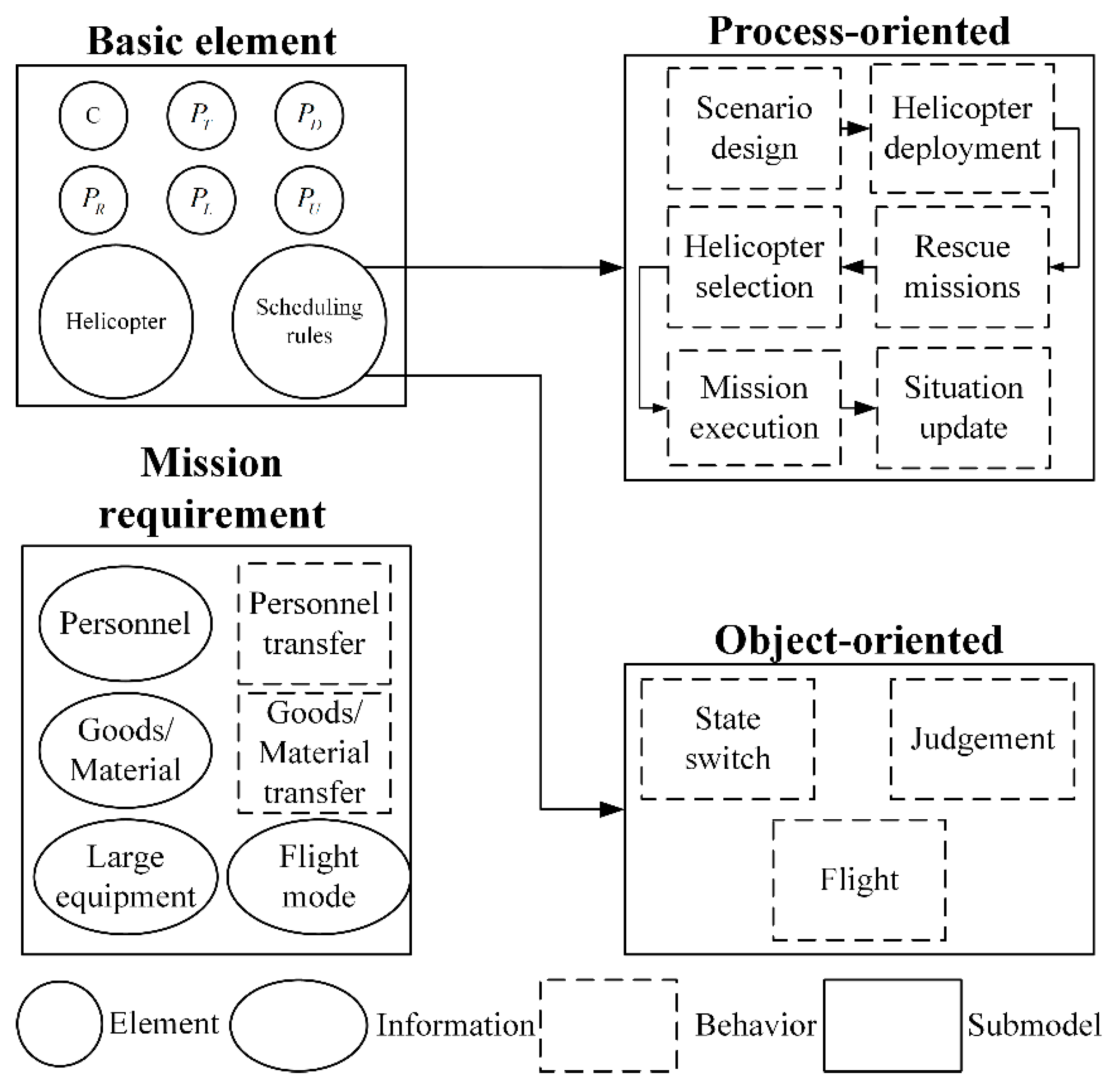{kind=link}
{kind=link}
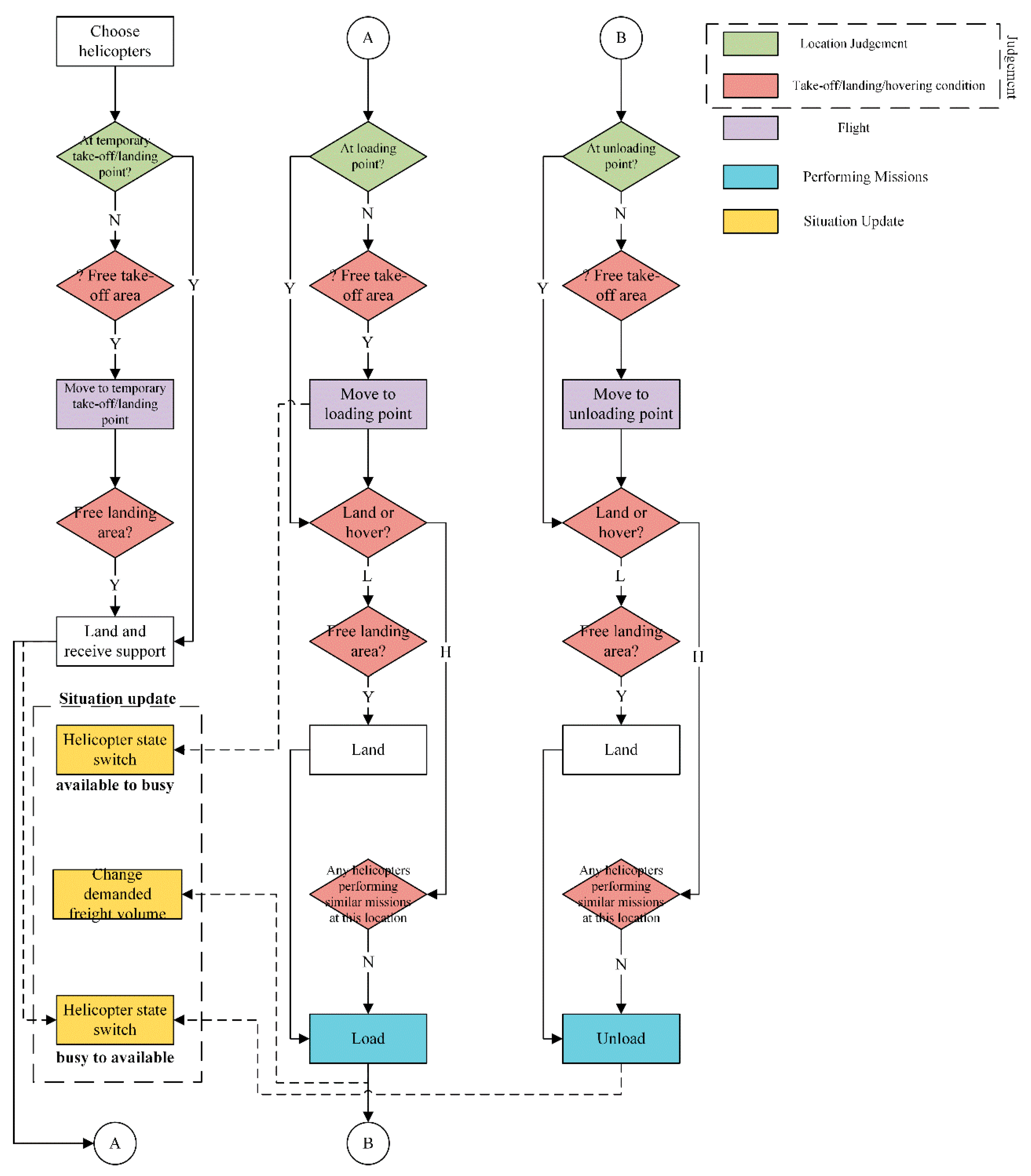{kind=link}
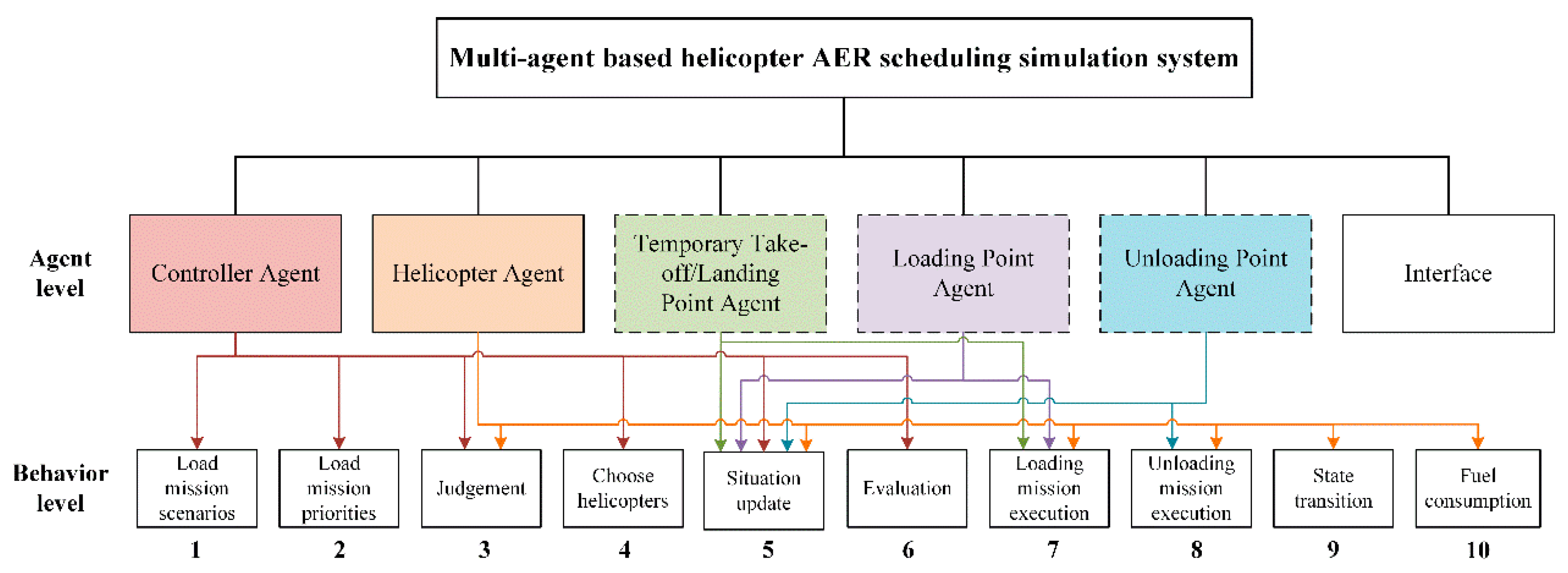{kind=link}
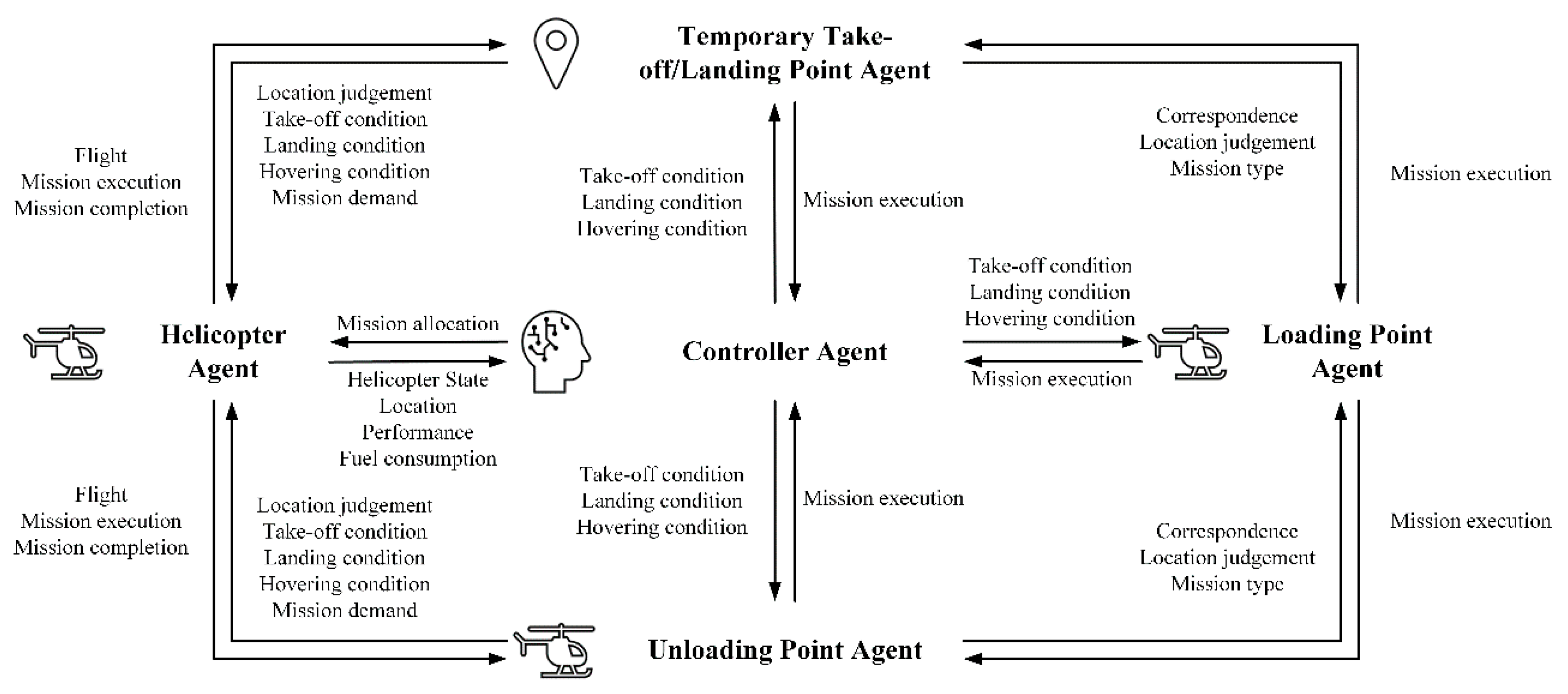{kind=link}
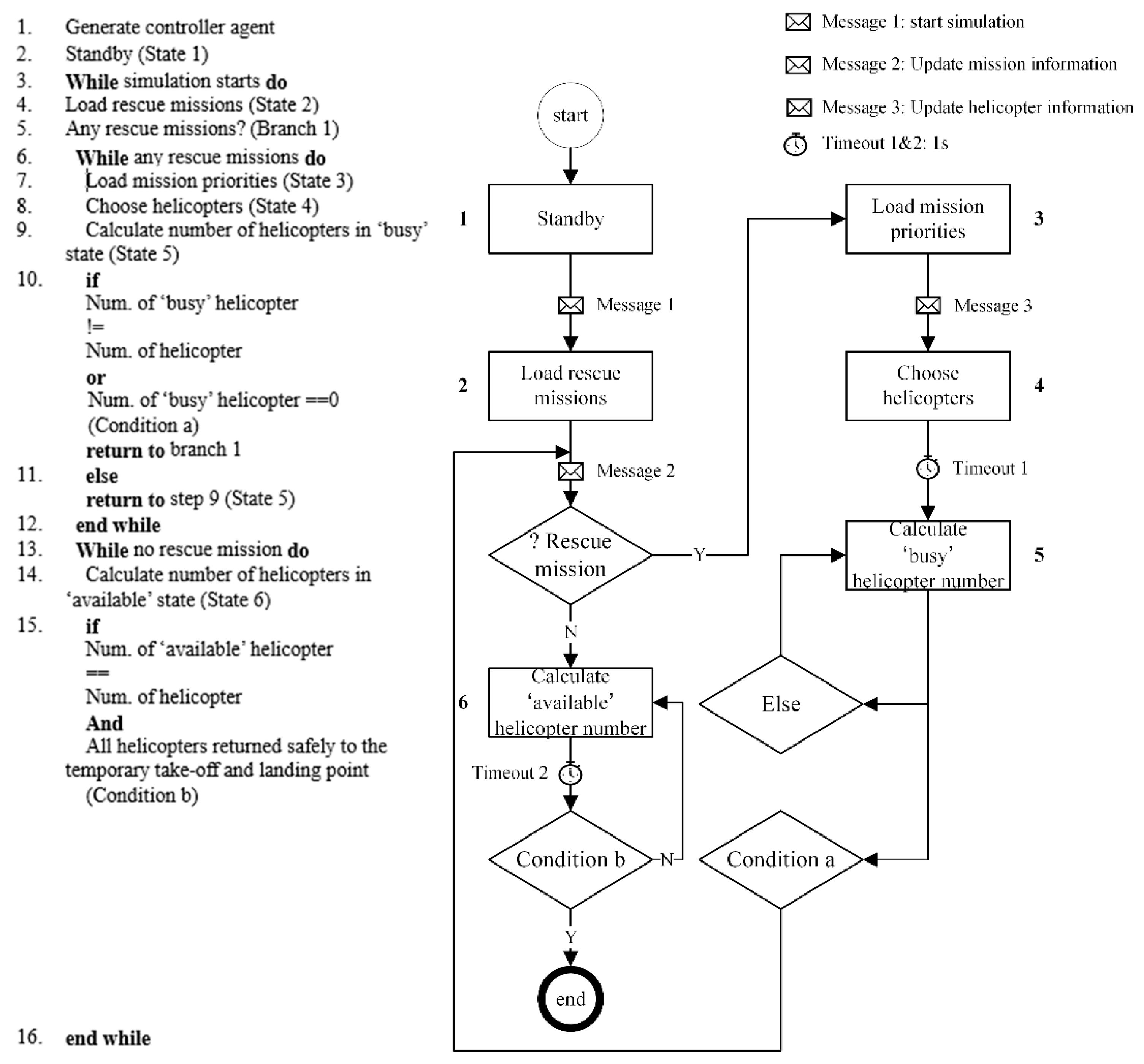{kind=link}
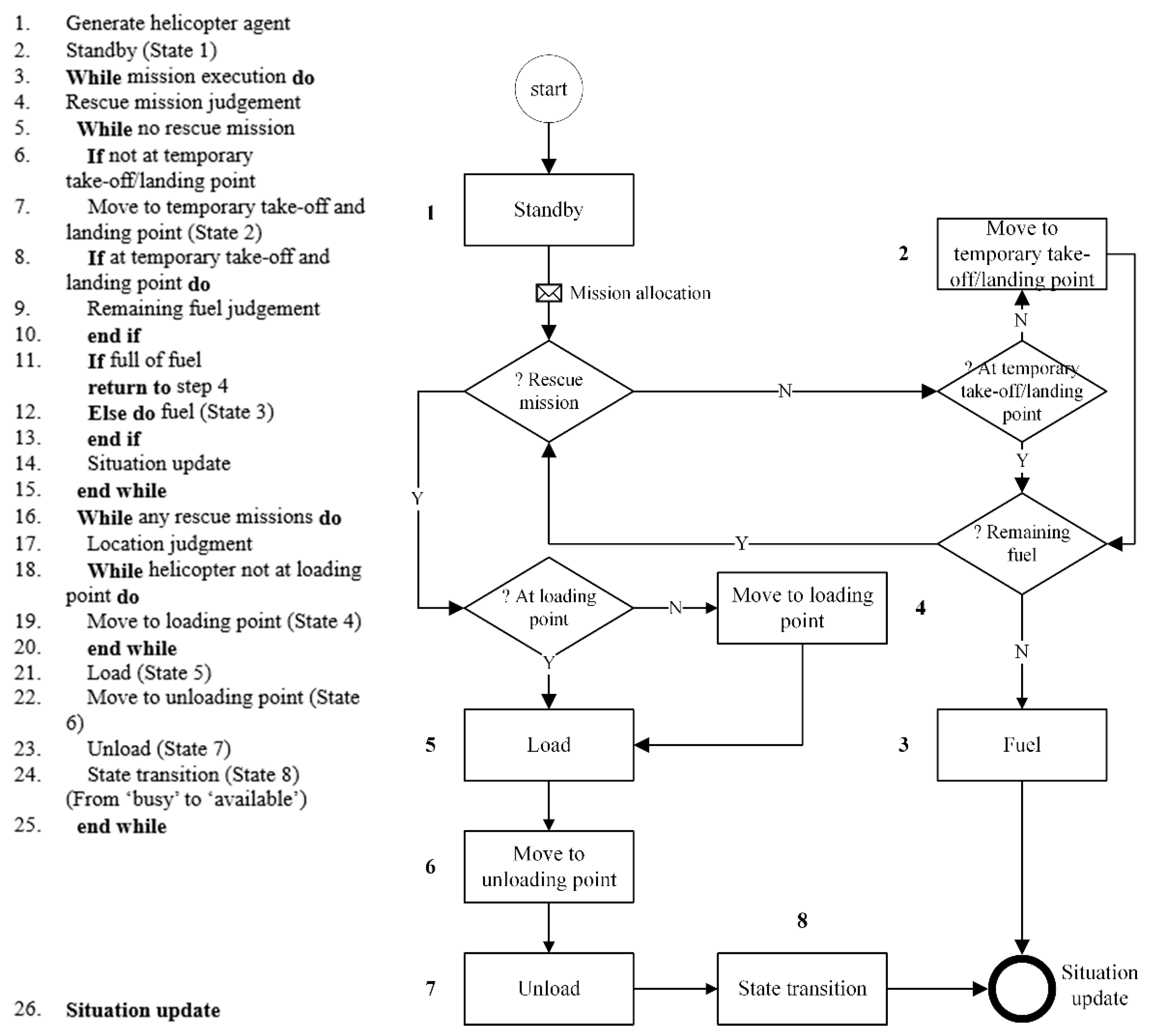{kind=link}
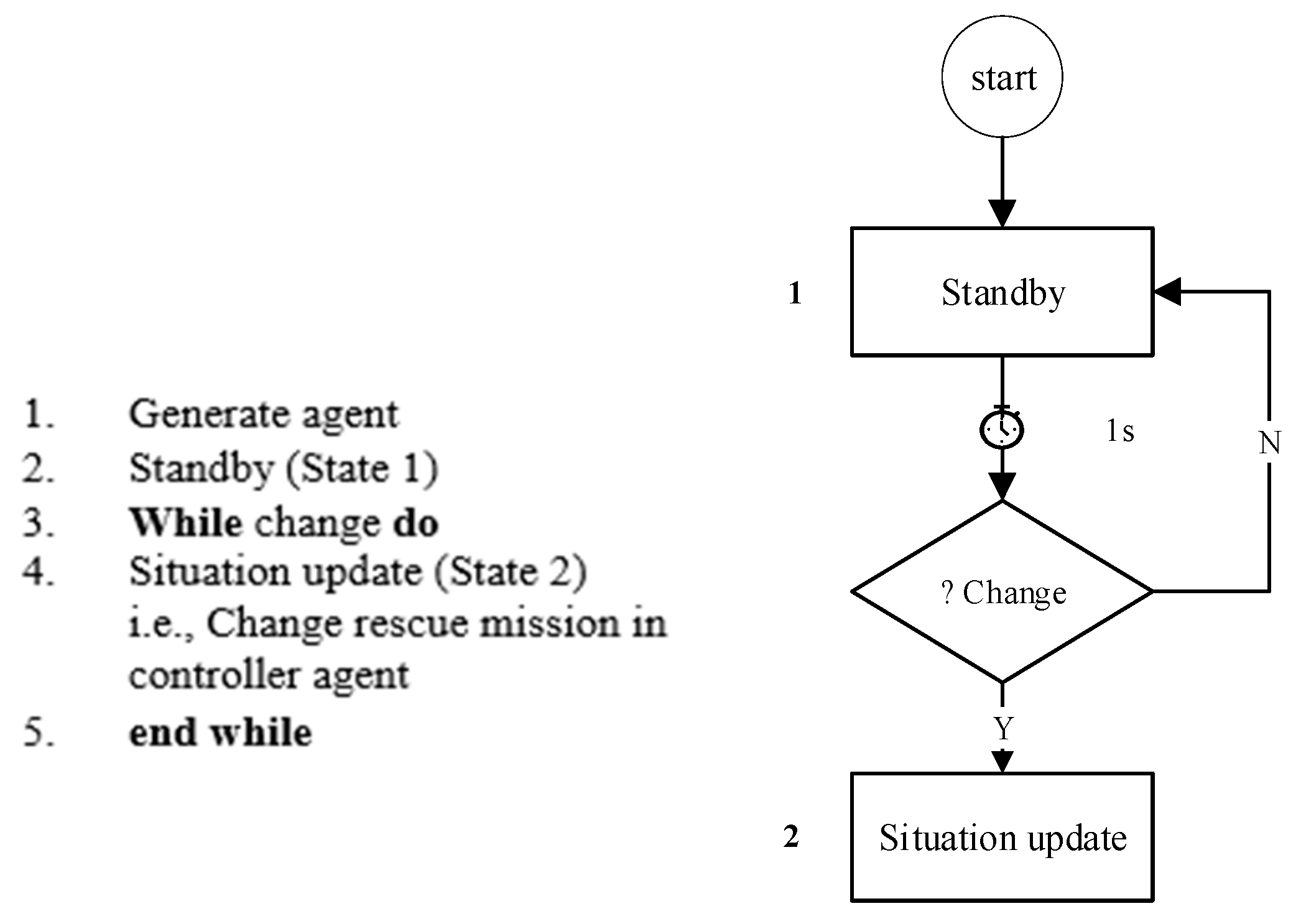{kind=link}
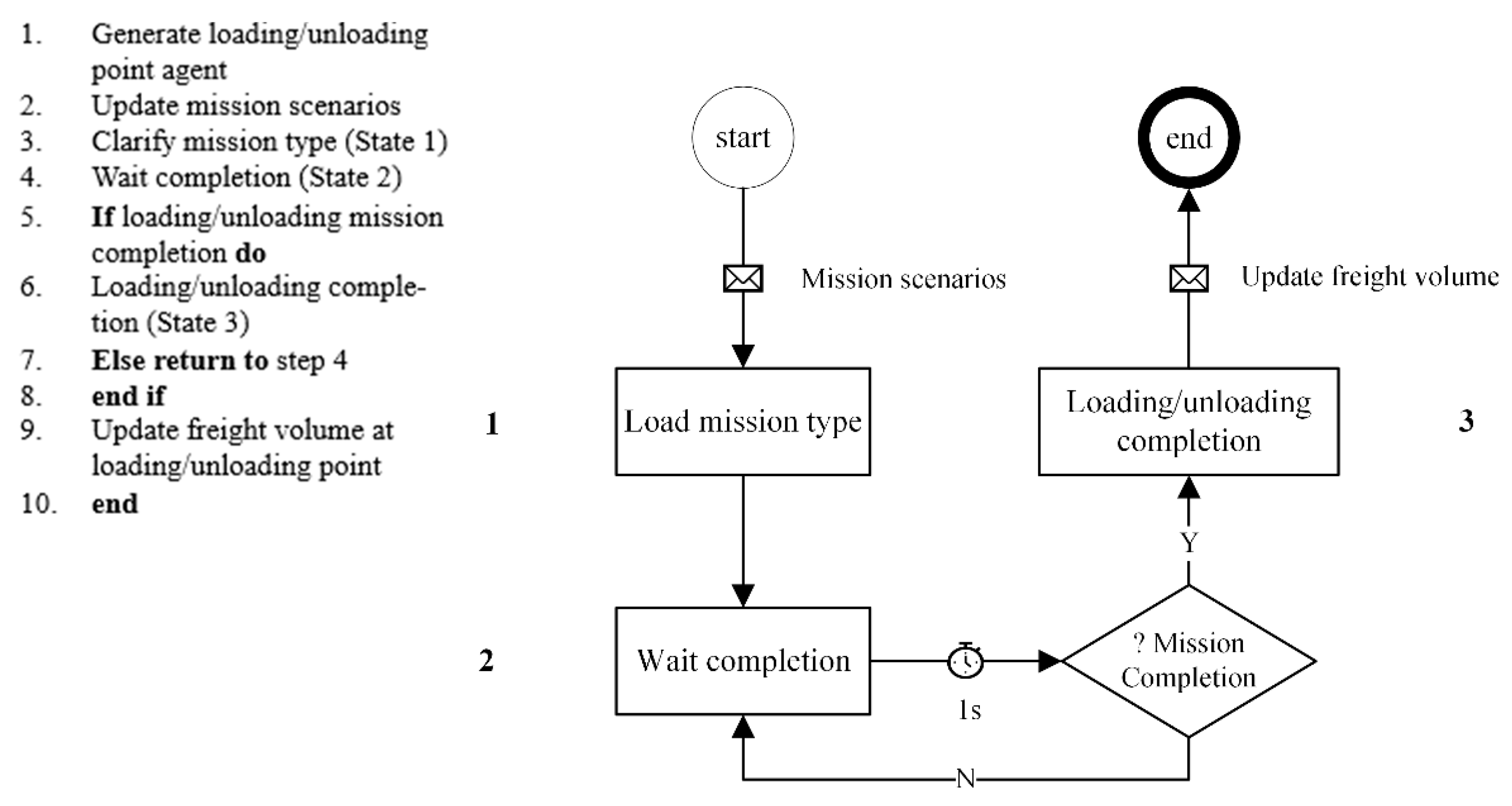{kind=link}
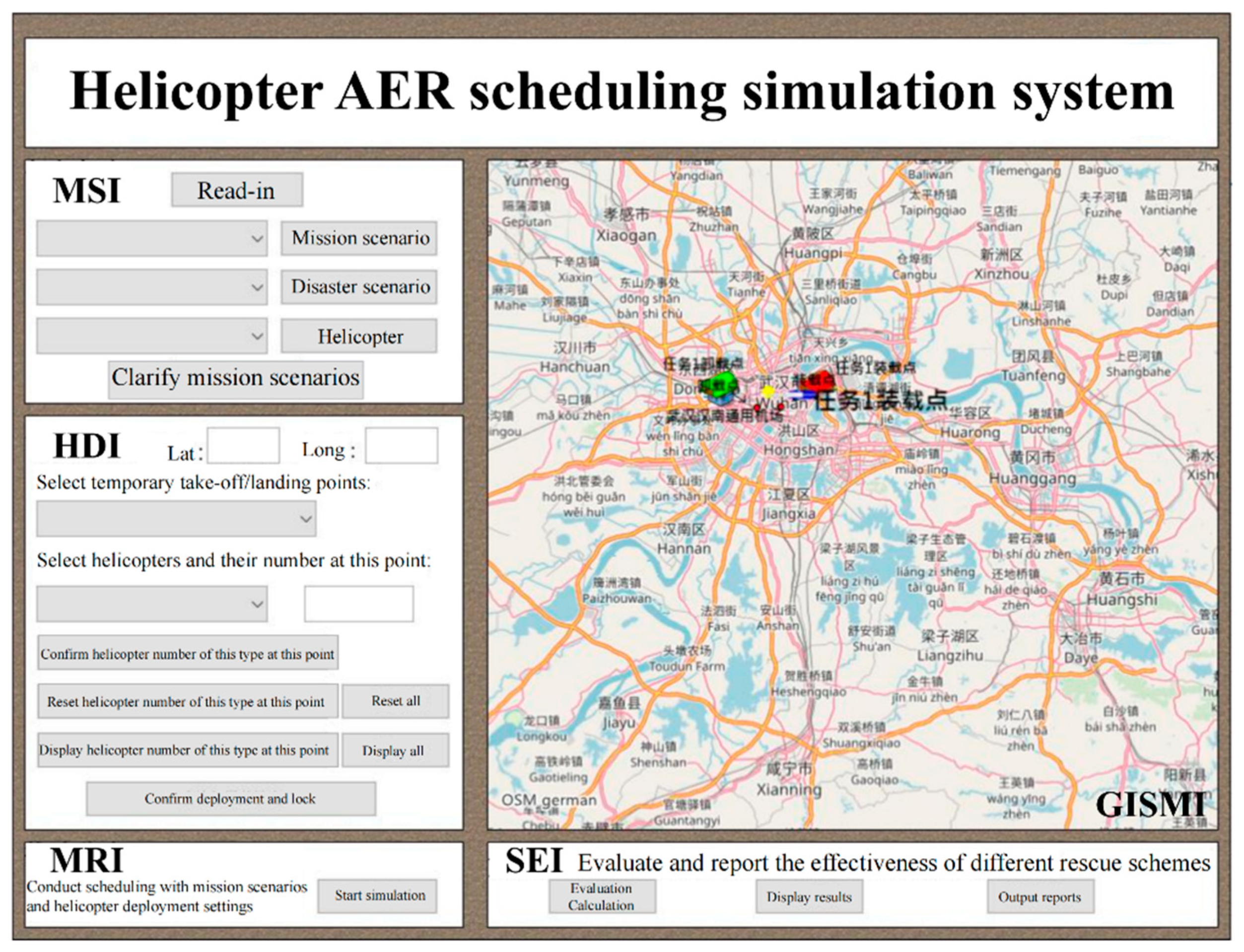{kind=link}
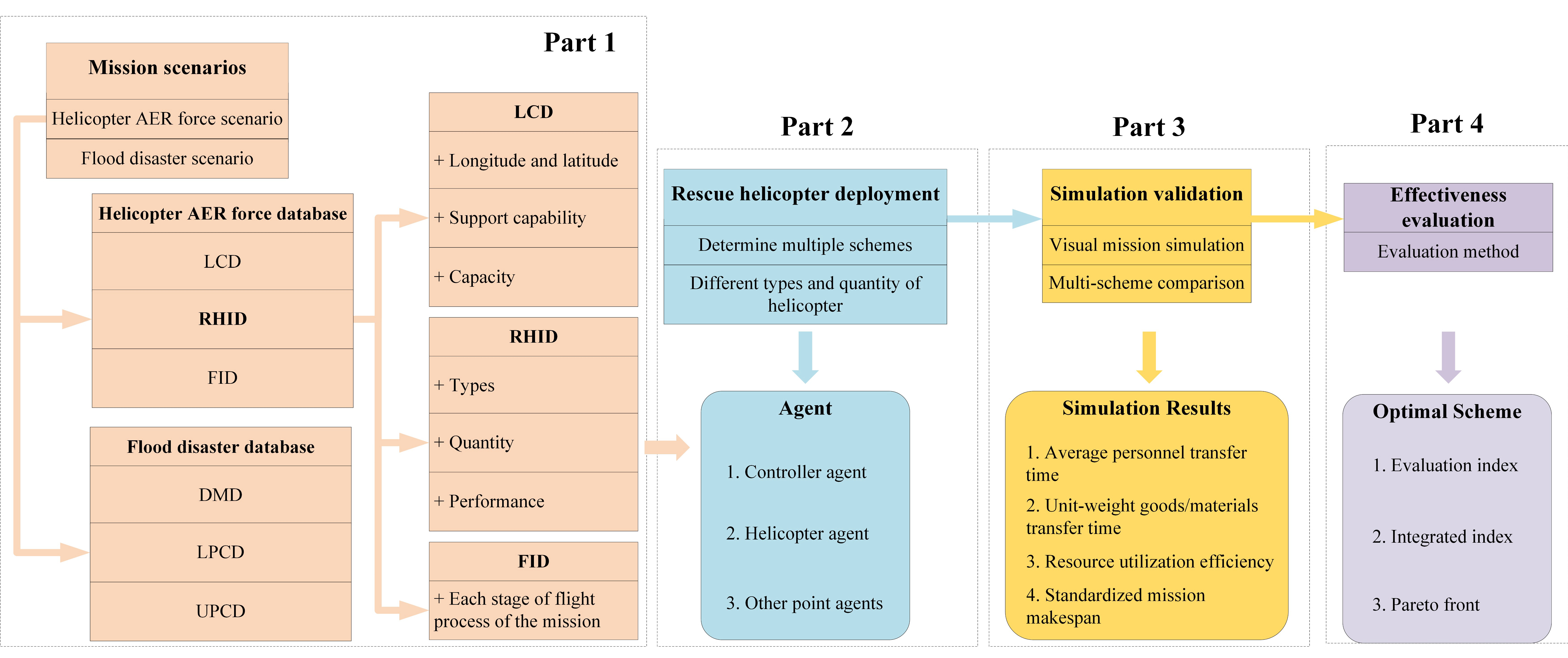{kind=link}
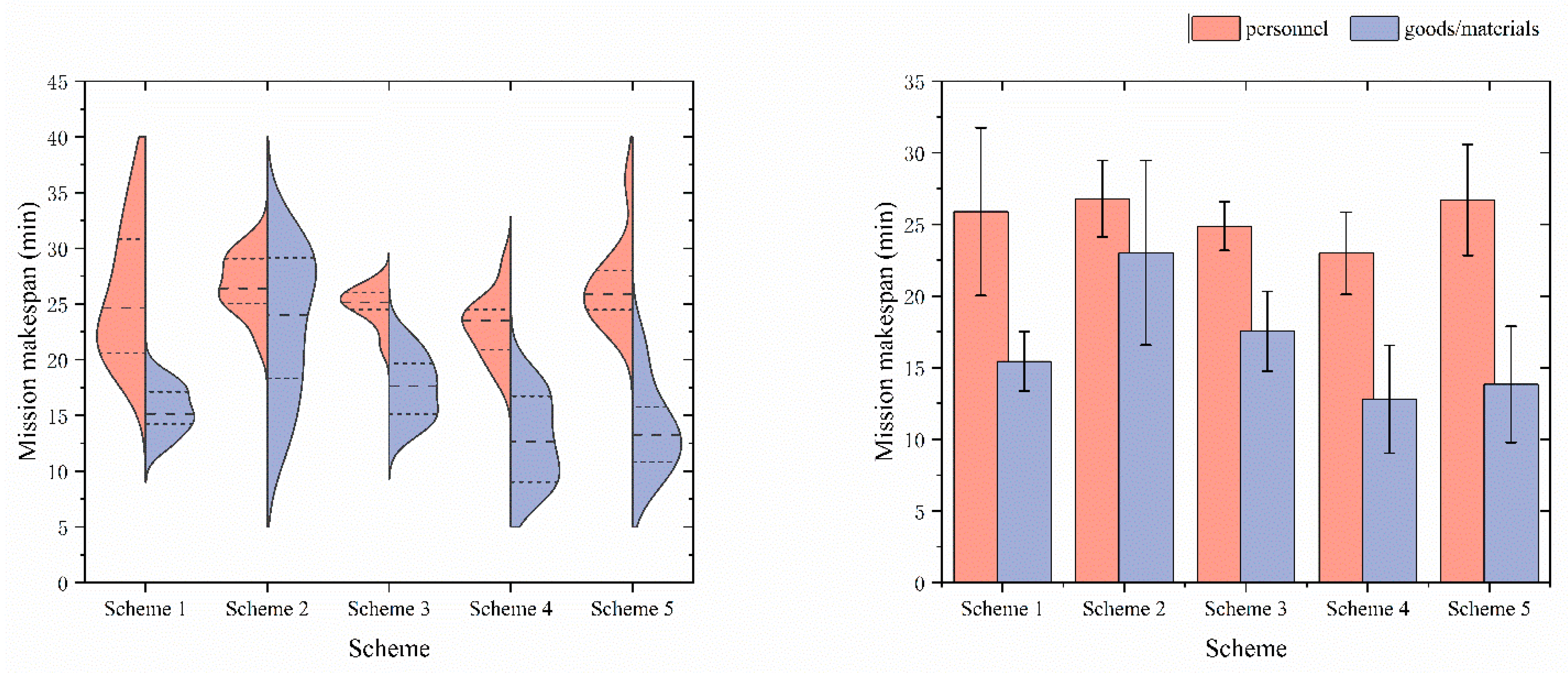{kind=link}
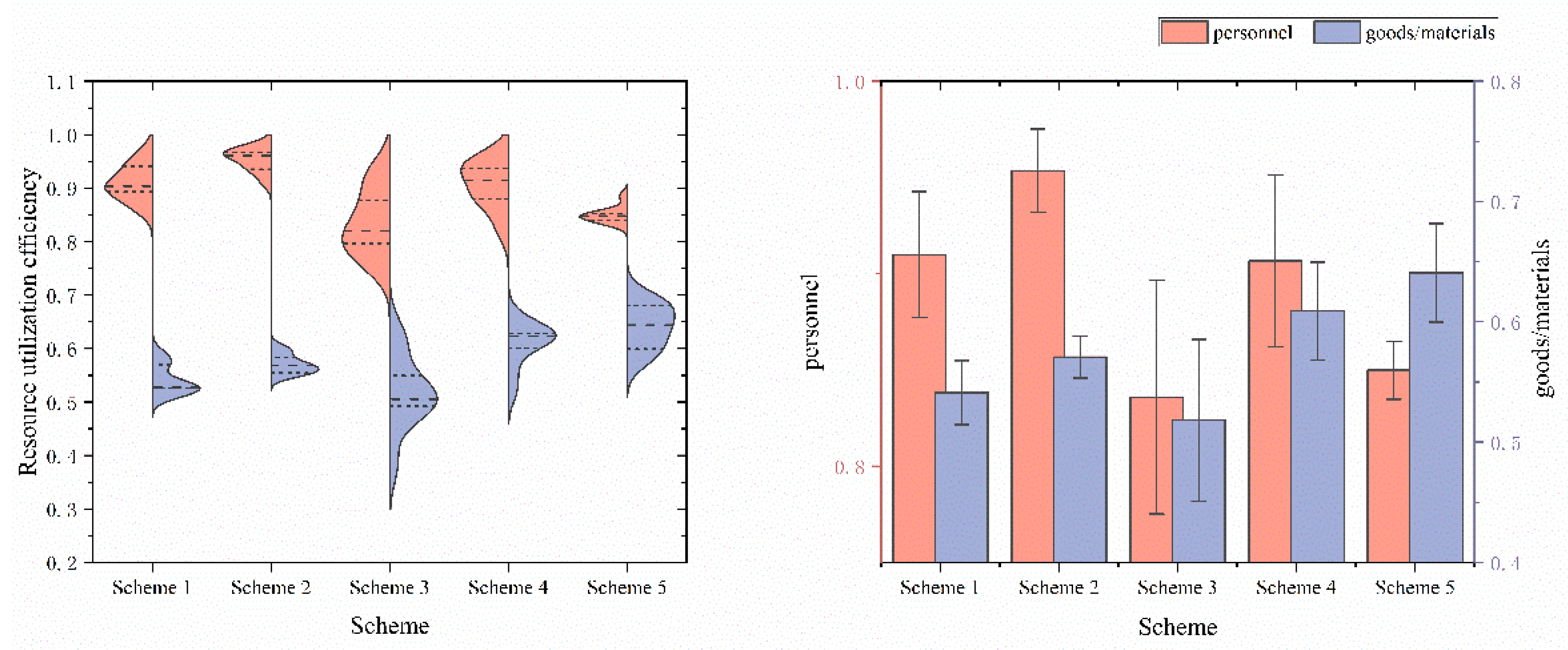{kind=link}
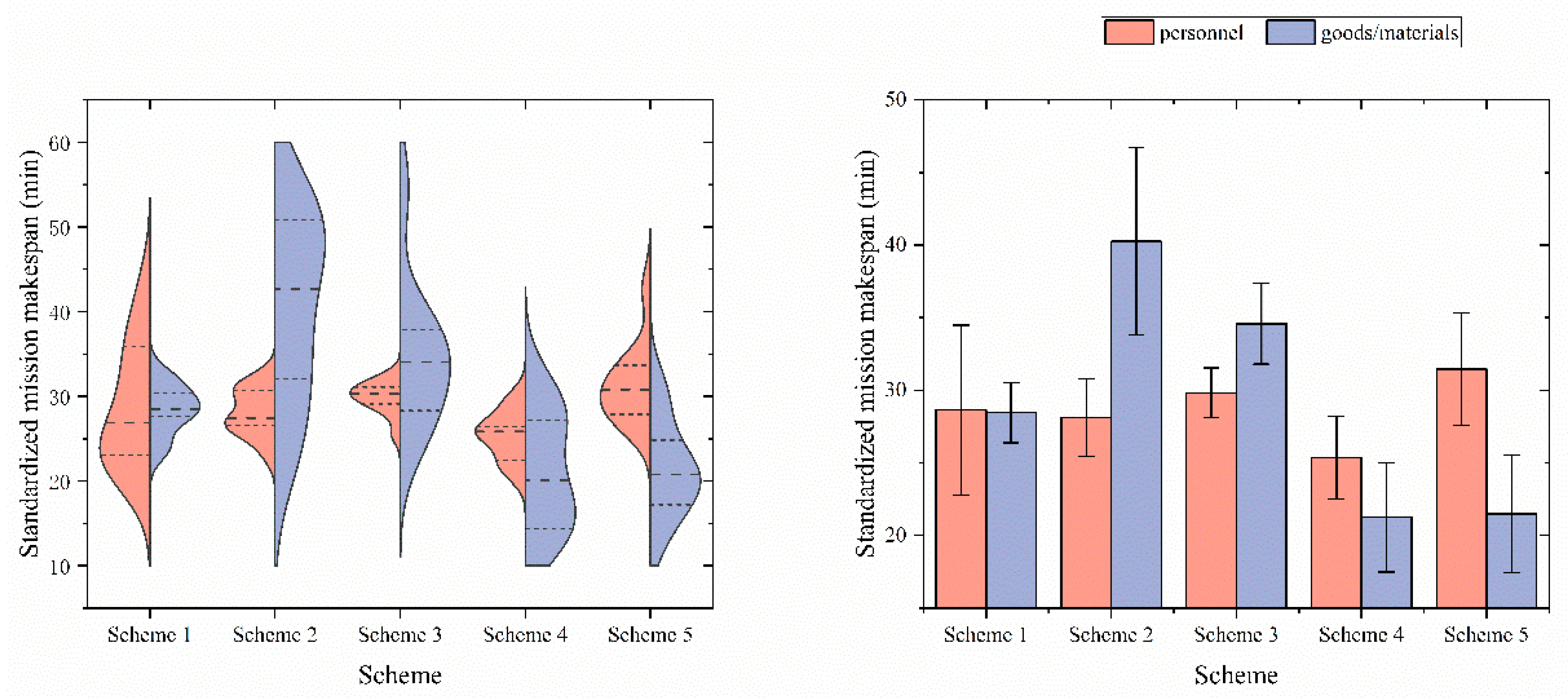{kind=link}
Table 1.
Correspondence between loading points and unloading points under different mission types.
| Mission Classification | Mission Type | Load | Flight | Loading Point | Unloading Point |
|---|---|---|---|---|---|
| Personnel transfer mission | Hanging and exporting personnel | People | Slung-load (Hover) | ||
| Landing and exporting personnel | People | Normal (Land) | |||
| Hovering and importing personnel | People | Slung-load (Hover) | |||
| Landing and importing personnel | People | Normal (Land) | |||
| Goods/Material transfer mission | Airdrop goods/material | Goods/Material | Slung-load (Hover) | ||
| Landing and transporting goods/material | Goods/Material | Normal (Land) | |||
| Blocking dike | Goods/Material | Slung-load (Hover) | |||
| Hanging and transporting large equipment | Large Equipment | Slung-load (Hover) |
Table 2.
Agents in Helicopter AER Scheduling Simulation System, their behaviors, and functions.
| Agent | Behavior | Explanation |
|---|---|---|
| Controller Agent | Load mission scenarios | Reading the database information corresponding to mission scenarios through the user interface |
| Load mission priorities | Sorting the mission release order of the simulation system according to the mission priority | |
| Choose helicopters | Choosing helicopters according to scheduling rules | |
| Judgement | Judging when the simulation starts and whether the simulation end conditions are met | |
| Situation update | Reassigning missions according to the updated missions and priorities | |
| Evaluation | Evaluating the simulation effectiveness result for different rescue schemes | |
| Helicopter Agent | Mission execution | Describing the helicopter logic during the loading/unloading mission execution |
| State transition | Showing the transition between ‘available’ state and ‘busy’ state | |
| Fuel consumption | Calculating the fuel consumption | |
| Situation update | Delivering helicopter state transition information | |
| Judgement | Describing judgement of mission execution, state transition, fuel consumption, and situation update | |
| Temporary Take-off/Landing Point Agent | Loading mission execution | Describing the loading mission execution when temporary take-off/landing point coincides with loading point |
| Situation update | Describing the change of remaining missions related to the temporary take-off/landing point | |
| Loading Point Agent | Loading mission execution | Describing the execution process of loading missions |
| Situation update | Describing the change of remaining missions related to the loading point | |
| Unloading Point Agent | Unloading mission execution | Describing the execution process of unloading missions |
| Situation update | Describing the change of remaining missions related to the unloading point |
Table 3.
Messages sent by agents.
| Agent | Message | Implication |
|---|---|---|
| Controller Agent | Start of simulation | Simulation start message associated with the user interface of the simulation system |
| Mission allocation | Information on the assignment of helicopters for missions corresponding to priority | |
| Updated situation | Remaining mission information corresponding to each point after situation update | |
| Helicopter Agent | Fuel consumption | Information on the amount of fuel consumed by helicopters for determining the percentage of fuel remaining |
| Start of mission | Mission start message after mission allocation associated with the Controller Agent | |
| State | Message reflecting whether helicopter is in ‘available’ or ‘busy’ state | |
| Performance | Information of helicopters including useful load, fuel capacity, cruise speed, passenger capacity, ability to cable land, etc. | |
| Location | Geographical coordinate of the helicopter | |
| Point-agents | Num. of take-offs | Numbers of helicopters that can take off simultaneously at this point |
| Num. of landings | Numbers of helicopters that can land simultaneously at this point | |
| Mission type | Information on the load (personnel/goods/material) and flight mode (normal flight/slung-load flight) | |
| Mission executability | Executability to takeoff/land/hover to perform missions | |
| Mission completion | Loading/unloading completion and the change of remaining missions related to this point |
Table 4.
Agent variables used in Helicopter AER Scheduling Simulation System, their types and functions.
Table 4.
Agent variables used in Helicopter AER Scheduling Simulation System, their types and functions.
| Agent | Variable | Type | Implication |
|---|---|---|---|
| Controller Agent | StartSimulation | Boolean | Simulation starts or not |
| Num. of completed missions | Int | Number of completed missions | |
| Num. of ‘busy’ helicopters | Int | Number of helicopters in ‘busy’ state | |
| Num. of helicopters | Int | Number of helicopters | |
| Num. of missions | Int | Number of missions in the mission scenario | |
| MissionPriority | Double | Priority of the mission | |
| NoChoice | Boolean | Situation updated or not | |
| Helicopter Agent | BeginConsumption | Boolean | Calculate fuel consumption or not |
| BeginExecute | Boolean | Situation updated or not | |
| State | Boolean | ‘available’ state or ‘busy’ state | |
| Performance | Performance (custom java class) | Information of helicopters including useful load, fuel capacity, cruise speed, passenger capacity, ability to cable land, etc. | |
| Fuel consumption rate | Double | The ratio of fuel consumption to time | |
| Fuel consumption time | Double | Time of fuel consumption including flying, take-off, landing, and hovering | |
| Location | Location (custom java class) | Geographical coordinate of the helicopter | |
| Point-agents | Num. of take-offs | Int | Numbers of helicopters that can take off simultaneously at this point |
| Num. of landings | Int | Numbers of helicopters that can land simultaneously at this point | |
| Num. of missions | Int | Number of missions that can be performed simultaneously at this point | |
| FinishMission | Boolean | Mission completed or not | |
| FlightMode | Boolean | Loaded in fuselage or slung load operation |
Table 5.
Information on disaster sites in the example case.
| Disaster Site Information | Place A | Place B | Place C | Point D | Point E |
|---|---|---|---|---|---|
| Longitude (°) | 114.33 | 114.51 | 114.03 | 114.64 | 114.23 |
| Latitude (°) | 30.39 | 30.58 | 30.6 | 30.14 | 30.52 |
| Freight volume of personnel (person) | 200 | 0 | 198 | 80 | 80 |
| Freight volume of goods/material (kg) | 8000 | 10,000 | 5000 | 2600 | 2600 |
| Large equipment needed (piece) | 0 | 1 | 0 | 0 | 0 |
| Precipitation grade of rain weather | 4 | 4 | 0 | 4 | 4 |
| Risk of secondary disasters (%) | 0 | 30 | 0 | 0 | 0 |
| Personnel transfer mission priority | 2 | / | 1 | 0.4 | 0.4 |
| Goods/material transfer mission priority | 1.5 | 2.1 | 0.46 | 0.36 | 0.36 |
| Equipment transfer mission priority | / | 0.94 | / | / | / |
Table 6.
Information about surrounding temporary take-off/landing points.
| Airport Information | Wuhan | Xiantao | Lishan | Jingmen | Jingdezhen | Laiwu | Zhuzhou |
|---|---|---|---|---|---|---|---|
| Longitude (°) | 114.06 | 113.6 | 113.33 | 112.05 | 117.08 | 117.57 | 113.21 |
| Latitude (°) | 30.25 | 30.41 | 31.89 | 30.98 | 29.14 | 36.44 | 27.77 |
| Helicopter stands (a) | 28 | 10 | 16 | 28 | 2 | 8 | 10 |
| Maximum simultaneous takeoffs (a) | 25 | 4 | 4 | 8 | 20 | 8 | 10 |
| Maximum simultaneous landings (a) | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| Maximum number of supporting helicopters simultaneously (a) | 1 | 0 | 0 | 1 | 1 | 1 | 1 |
| Maximum number of refueling simultaneously (a) | 1 | 0 | 0 | 1 | 0 | 1 | 1 |
Table 7.
Information of available helicopters.
| Available Helicopter Information | AC313 | EC135 | Enstrom 480 | PZL SW-4 | Robinson R44 | Mi-26 | Eurocopter AS350 |
|---|---|---|---|---|---|---|---|
| Max useful load (kg) | 5000 | 1500 | 500 | 600 | 300 | 20,000 | 1026 |
| Fuel capacity (L) | 4750 | 700 | 340 | 471 | 140 | 12,000 | 540 |
| Maximum takeoff mass (kg) | 13,800 | 2500 | 1361 | 1800 | 1133 | 56,000 | 2250 |
| Cruise speed (km/h) | 250 | 230 | 211 | 182 | 202 | 255 | 226 |
| Passenger capacity (a) | 27 | 7 | 4 | 4 | 3 | 82 | 4 |
| Ability to cable land | 1 | 1 | 0 | 0 | 0 | 1 | 0 |
| Refueling time (min) | 9.5 | 1.5 | 0.7 | 1 | 0.5 | 24 | 1.1 |
| Waiting time before refueling (min) | 35 | 43 | 45 | 44 | 45 | 45 | 44 |
| Handover time of personnel (min/person) | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Handover time of goods/material (min/100 kg) | 10 | 10 | 10 | 10 | 10 | 10 | 10 |
Table 8.
Information on rescue schemes.
| Airport | Helicopter | Scheme 1 | Scheme 2 | Scheme 3 | Scheme 4 | Scheme 5 |
|---|---|---|---|---|---|---|
| Wuhan Hannan General Aviation Airport | AC313 | 2 | 2 | 1 | 2 | 2 |
| EC135 | 1 | 1 | 1 | 1 | ||
| Enstrom 480 | 1 | 1 | 1 | 1 | ||
| PZL SW-4 | 2 | 2 | 1 | 2 | 2 | |
| Robinson R44 | 2 | 2 | 2 | 2 | 2 | |
| Mi-26 | 2 | 1 | ||||
| Xintao Airport | AC313 | 1 | 1 | 1 | ||
| EC135 | 1 | 1 | 1 | 1 | ||
| Robinson R44 | 1 | |||||
| Eurocopter AS350 | 1 | 1 | 1 | 1 | ||
| Lishan General Aviation Airport | EC135 | 1 | ||||
| Jingmen Zhanghe Airport | AC313 | 1 | ||||
| EC135 | 1 | |||||
| Mi-26 | 1 | 1 | ||||
| Jingdezhen Lumeng Airport | SW-4 | 1 | 1 | 1 | 1 | 1 |
| Zhuzhou Lusong Airport | EC135 | 1 | 1 | 1 | ||
| Laiwu Xueye Airport | Mi-26 | 1 |
Table 9.
Results of one certain simulation for Scheme 1.
| No. | Helicopter | Sortie | (Person) | (min) | (min/Person) | (kg) | (min) | (min/100 kg) | ||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | AC313 | 1st | 27 | 1.17 | 87.01 | 2.75 | / | / | / | / |
| 1 | AC313 | 2nd | 27 | 1.17 | 208.27 | 6.59 | / | / | / | / |
| 1 | AC313 | 3rd | / | / | / | / | 2000 | 1.1 | 98.07 | 0.04 |
| 1 | AC313 | 4th | 27 | 1.17 | 203.90 | 6.45 | / | / | / | / |
| 2 | AC313 | 1st | 27 | 1.17 | 97.50 | 3.09 | / | / | / | / |
| 2 | AC313 | 2nd | 12 | 1.02 | 291.88 | 23.85 | / | / | / | / |
| 2 | AC313 | 3rd | 27 | 1.17 | 244.90 | 7.75 | / | / | / | / |
| 3 | EC135 | 1st | / | / | / | / | 1500 | 1.05 | 52.19 | 0.03 |
| 3 | EC135 | 2nd | 7 | 1 | 68.40 | 9.77 | / | / | / | / |
| 3 | EC135 | 3rd | 7 | 1 | 147.90 | 21.13 | / | / | / | / |
| 3 | EC135 | 4th | / | / | / | / | 1500 | 1 | 73.37 | 0.05 |
| 3 | EC135 | 5th | 7 | 1 | 155.98 | 22.28 | / | / | / | / |
| 4 | Enstrom 480 | 1st | 5 | 1 | 145.08 | 29.02 | / | / | / | / |
| 4 | Enstrom 480 | 2nd | 5 | 1 | 137.39 | 27.48 | / | / | / | / |
| 4 | Enstrom 480 | 3rd | / | / | / | / | 500 | 1 | 123.77 | 0.25 |
| 5 | PZL SW-4 | 1st | 5 | 1 | 309.30 | 61.86 | / | / | / | / |
| 5 | PZL SW-4 | 2nd | 5 | 1 | 64.79 | 12.96 | / | / | / | / |
| 6 | PZL SW-4 | 1st | 5 | 1 | 145.93 | 29.19 | / | / | / | / |
| 6 | PZL SW-4 | 2nd | 5 | 1 | 92.50 | 18.50 | / | / | / | / |
| 6 | PZL SW-4 | 3rd | 5 | 1 | 245.20 | 49.04 | / | / | / | / |
| 7 | Robinson R44 | 1st | / | / | / | / | 300 | 1 | 97.25 | 0.32 |
| 7 | Robinson R44 | 2nd | 4 | 1 | 222.12 | 55.53 | / | / | / | / |
| 7 | Robinson R44 | 3rd | 4 | 1 | 78.63 | 19.66 | / | / | / | / |
| 8 | Robinson R44 | 1st | 4 | 1 | 51.93 | 12.98 | / | / | / | / |
| 8 | Robinson R44 | 2nd | 4 | 1 | 349.45 | 87.36 | / | / | / | / |
| 9 | Mi-26 | 1st | / | / | / | / | 10,000 | 1.9 | 2019.34 | 0.11 |
| 10 | Mi-26 | 1st | / | / | / | / | 8000 | 1.7 | 22.34 | 0.002 |
| 10 | Mi-26 | 2nd | 82 | 1.72 | 237.91 | 1.69 | / | / | / | / |
| 10 | Mi-26 | 3rd | 69 | 1.59 | 202.28 | 1.84 | / | / | / | / |
| 11 | AC313 | 1st | / | / | / | / | 5000 | 1.4 | 52.13 | 0.007 |
| 11 | AC313 | 2nd | 27 | 1.17 | 78.89 | 2.50 | / | / | / | / |
| 11 | AC313 | 3rd | 27 | 1.17 | 93.28 | 2.95 | / | / | / | / |
| 11 | AC313 | 4th | 27 | 1.17 | 106.62 | 3.38 | / | / | / | / |
| 11 | AC313 | 5th | / | / | / | / | 200 | 1 | 63.84 | 0.32 |
| 11 | AC313 | 6th | 1 | 1 | 96.41 | 96.41 | / | / | / | / |
| 12 | EC135 | 1st | / | / | / | / | 1500 | 1.05 | 96.01 | 0.06 |
| 12 | EC135 | 2nd | 7 | 1 | 268.76 | 38.39 | / | / | / | / |
| 13 | Eurocopter AS350 | 1st | / | / | / | / | 1000 | 1 | 331.19 | 0.33 |
| 13 | Eurocopter AS350 | 2nd | / | / | / | / | 1000 | 1 | 231.61 | 0.23 |
| 14 | PZL SW-4 | 1st | 5 | 1 | 426.31 | 85.26 | / | / | / | / |
| 15 | EC135 | 1st | / | / | / | / | 1100 | 1.01 | 153.30 | 0.14 |
| 15 | EC135 | 2nd | 7 | 1 | 100.31 | 14.33 | / | / | / | / |
| 15 | EC135 | 3rd | 7 | 1 | 245.20 | 35.03 | / | / | / | / |
Table 10.
Mean values and standard deviations of simulation results correspond to different rescue schemes.
Table 10.
Mean values and standard deviations of simulation results correspond to different rescue schemes.
| Rescue Scheme Simulation Results | Scheme 1 | Scheme 2 | Scheme 3 | Scheme 4 | Scheme 5 | |
|---|---|---|---|---|---|---|
| Average personnel transfer time (min/person) | Mean values | 25.89 | 26.79 | 24.88 | 22.99 | 26.71 |
| Standard deviations | 5.85 | 2.67 | 1.70 | 2.87 | 3.87 | |
| Unit-weight goods/material transfer time (min/100 kg) | Mean values | 15.44 | 23.02 | 17.54 | 12.80 | 13.84 |
| Standard deviations | 2.08 | 6.44 | 2.78 | 3.76 | 4.05 | |
| Resource utilization efficiency for personnel transfer missions | Mean values | 91.00% | 95.36% | 83.59% | 90.66% | 84.99% |
| Standard deviations | 0.03 | 0.02 | 0.06 | 0.04 | 0.02 | |
| Resource utilization efficiency for goods/material transfer missions | Mean values | 54.11% | 57.08% | 51.80% | 60.88% | 64.08% |
| Standard deviations | 0.03 | 0.02 | 0.06 | 0.04 | 0.04 | |
| Standardized average personnel transfer time (min/person) | Mean values | 28.63 | 28.10 | 29.83 | 25.36 | 31.46 |
| Standard deviations | 7.29 | 2.76 | 1.95 | 2.85 | 4.73 | |
| Standardized unit-weight goods/material transfer time (min/100 kg) | Mean values | 28.46 | 40.25 | 34.58 | 21.25 | 21.49 |
| Standard deviations | 2.86 | 11.02 | 8.50 | 6.90 | 5.56 | |
Table 11.
The integrated index corresponds to rescue schemes of different helicopter deployments.
| Rescue Scheme | Integrated Index |
|---|---|
| Scheme 1 | 1.15 |
| Scheme 2 | 1.34 |
| Scheme 3 | 1.28 |
| Scheme 4 | 0.96 |
| Scheme 5 | 1.13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Xue, Y.; Gao, Y.; Tian, Y.; Liu, H.; Wang, X. Helicopter Rescue for Flood Disaster: Scheduling, Simulation, and Evaluation. Aerospace 2022, 9, 822. https://doi.org/10.3390/aerospace9120822
AMA Style
Xue Y, Gao Y, Tian Y, Liu H, Wang X. Helicopter Rescue for Flood Disaster: Scheduling, Simulation, and Evaluation. Aerospace. 2022; 9(12):822. https://doi.org/10.3390/aerospace9120822
Chicago/Turabian StyleXue, Yuanbo, Yuan Gao, Yongliang Tian, Hu Liu, and Xiyu Wang. 2022. "Helicopter Rescue for Flood Disaster: Scheduling, Simulation, and Evaluation" Aerospace 9, no. 12: 822. https://doi.org/10.3390/aerospace9120822
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.