Combining Electromyography and Tactile Myography to Improve Hand and Wrist Activity Detection in Prostheses


Abstract
1. Introduction
2. Materials
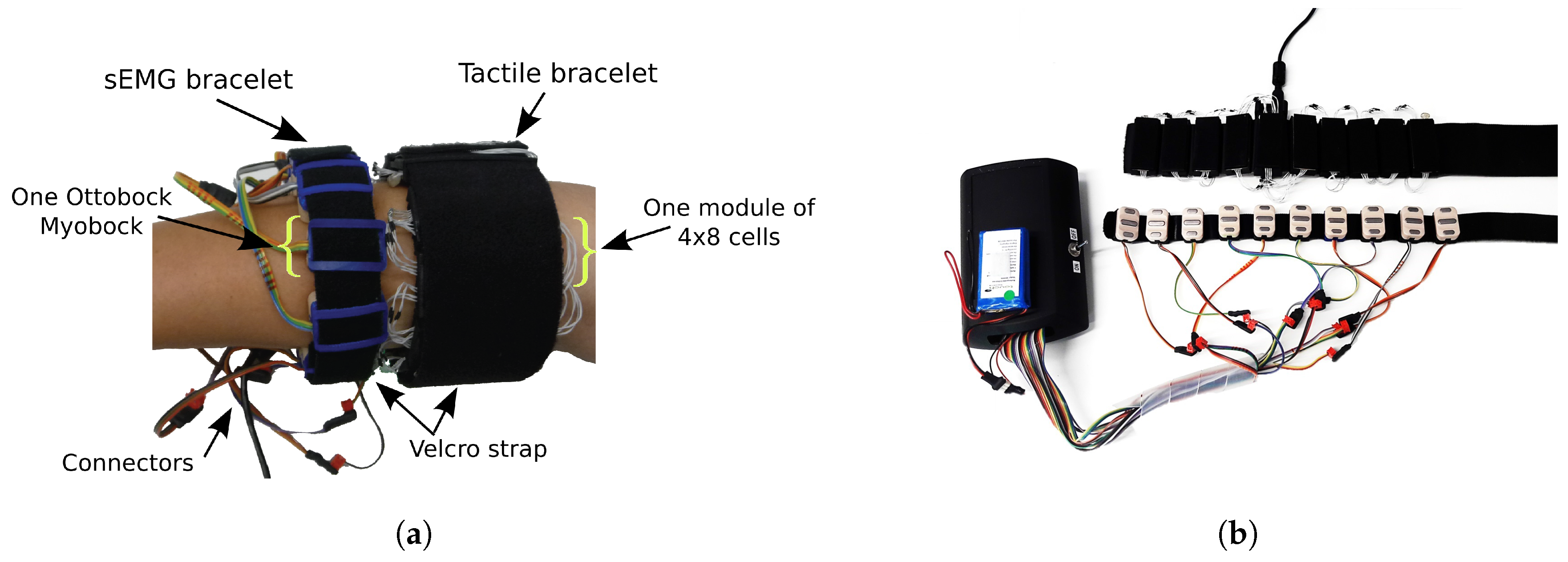
2.1. Surface Electromyography Bracelet
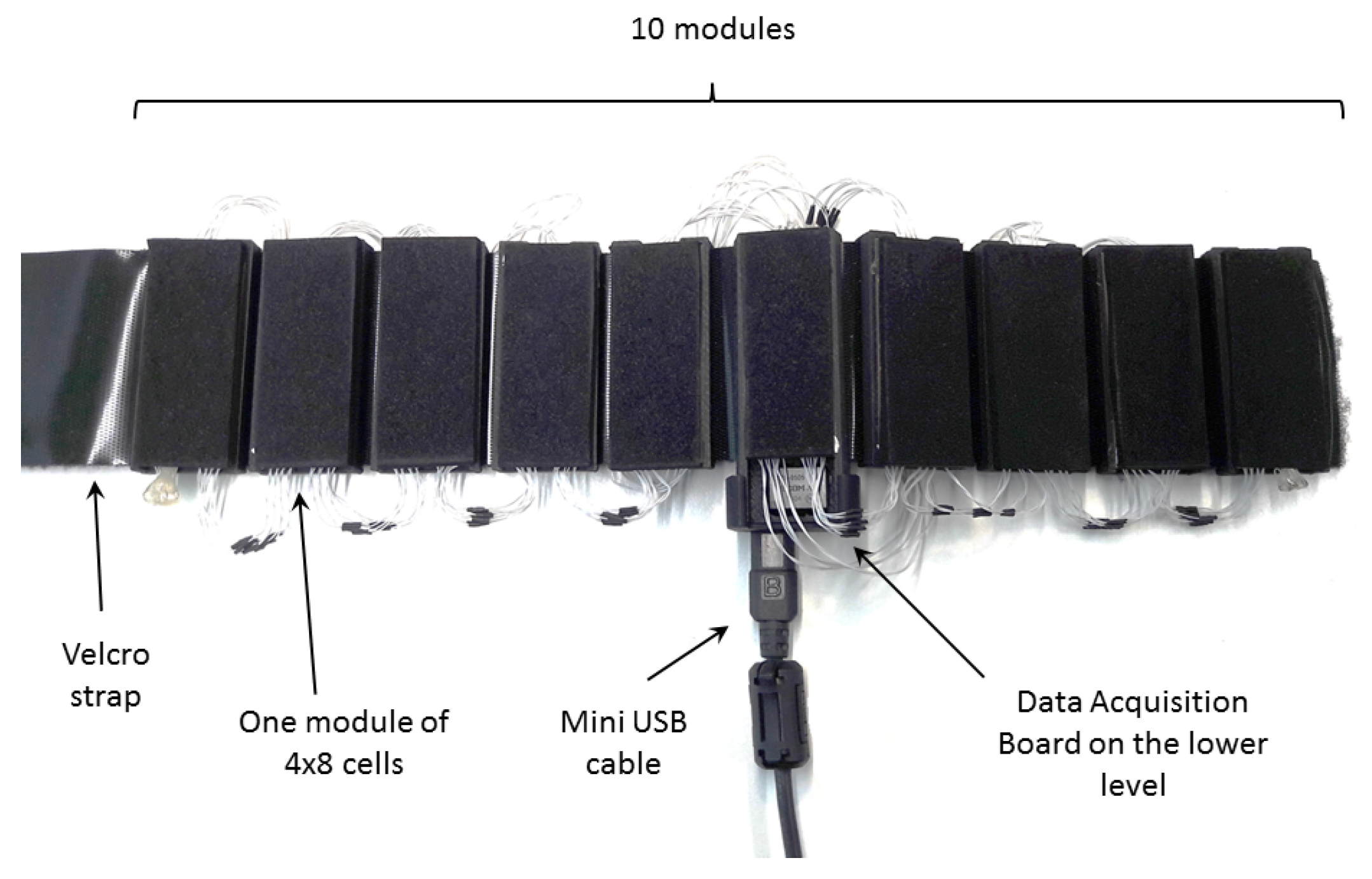
2.2. Tactile Bracelet
3. Methods
3.1. Gaussian Process Regression
3.2. Gaussian Process Regression for Matrix-Valued Data
3.3. Gaussian Process Regression for Multimodal Data
3.4. Kernels
4. Experiments
4.1. Participants
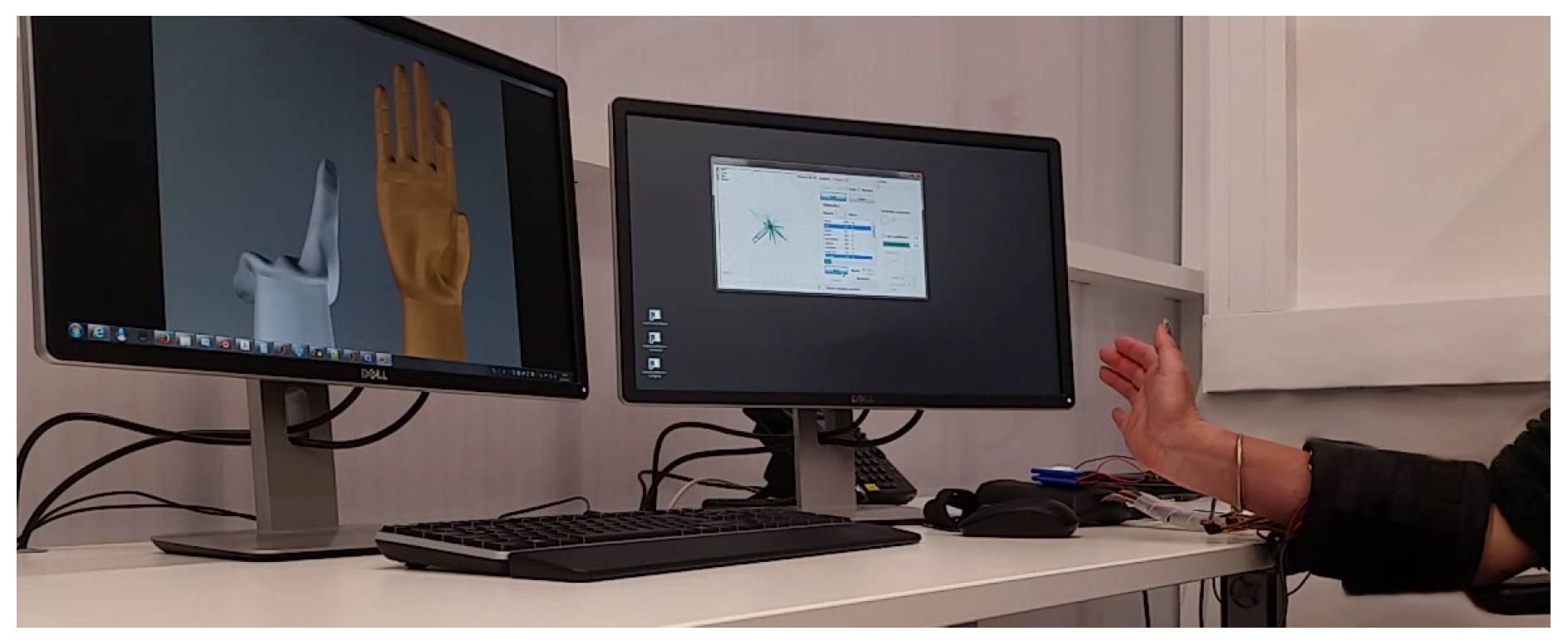
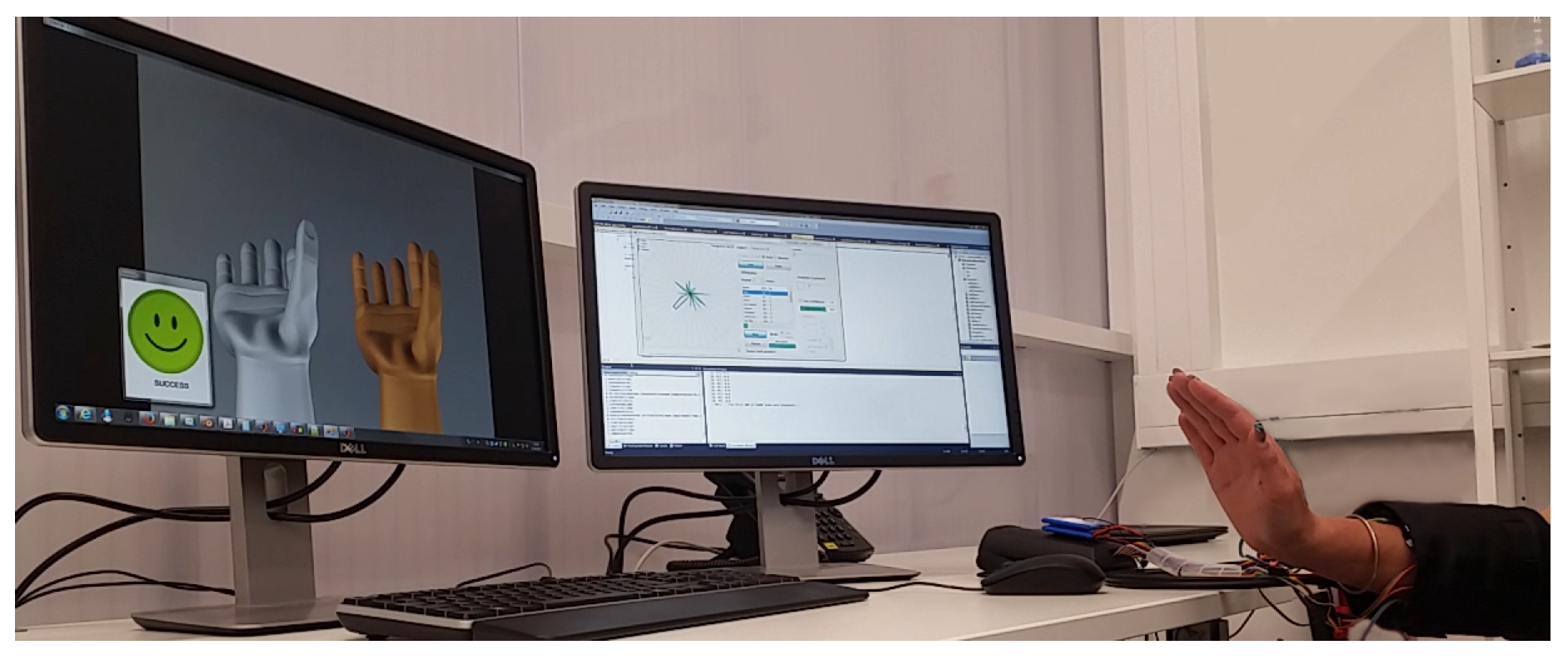
4.2. Experimental Setup
4.3. Experiment 1: Real-Time Goal-Reaching Task with Tactile Myography
4.4. Experiment 2: Combination of Electromyography and Tactile Myography
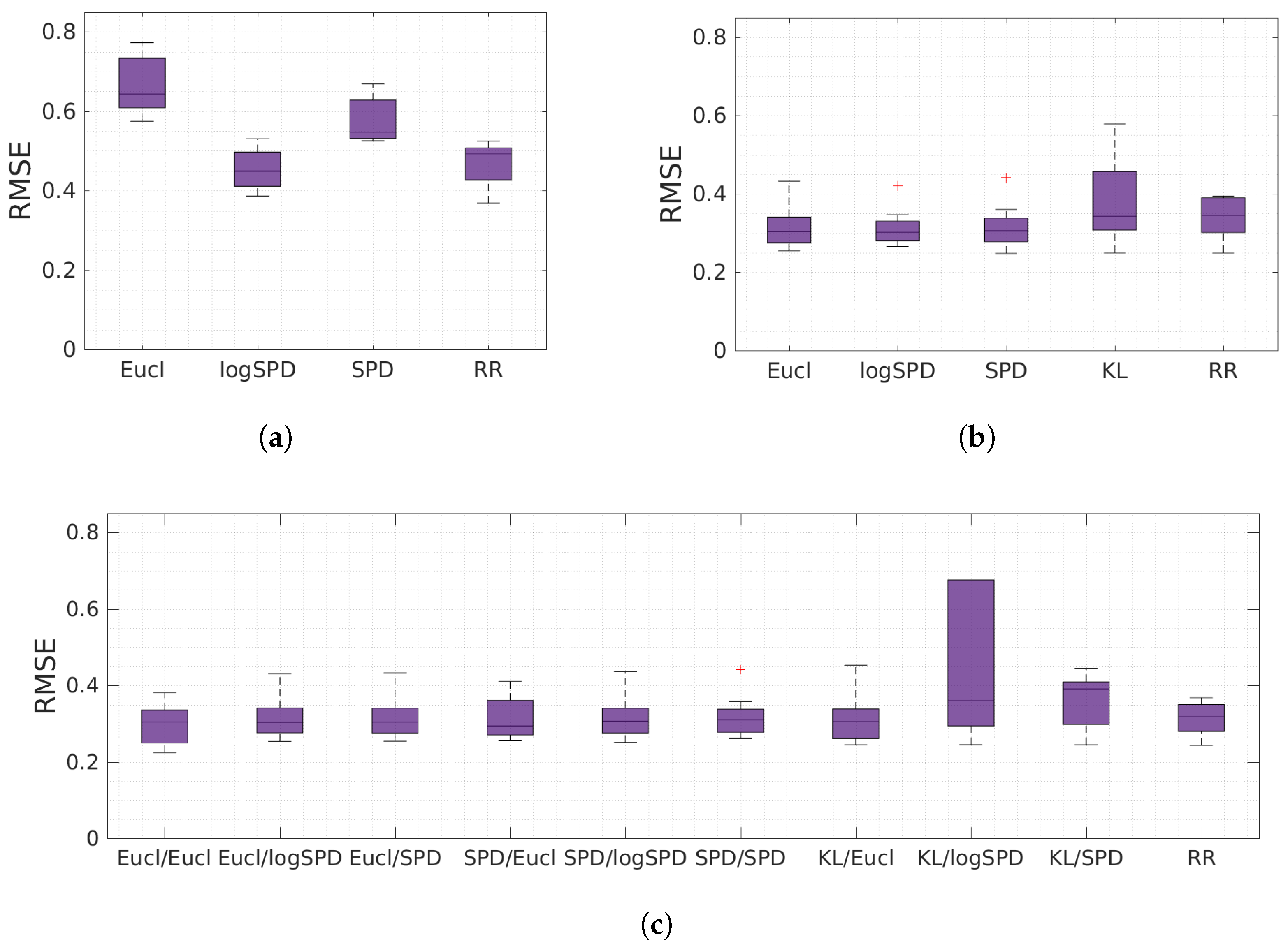
- sEMG signal as input: , and ;
- TMG signal as input: , , and ;
- sEMG and TMG signals as input: all combinations of , and for sEMG coupled with , and for TMG.
5. Results
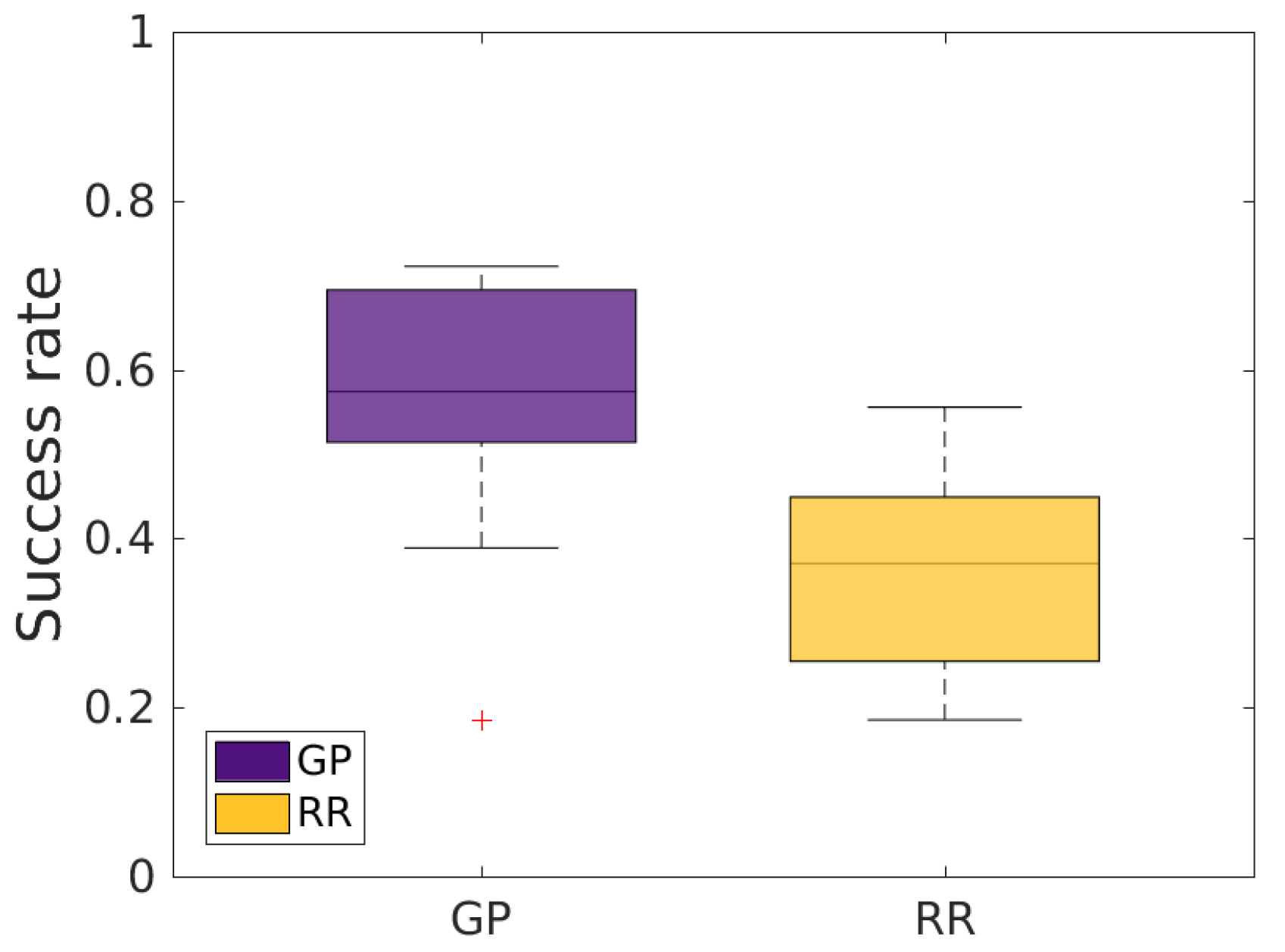
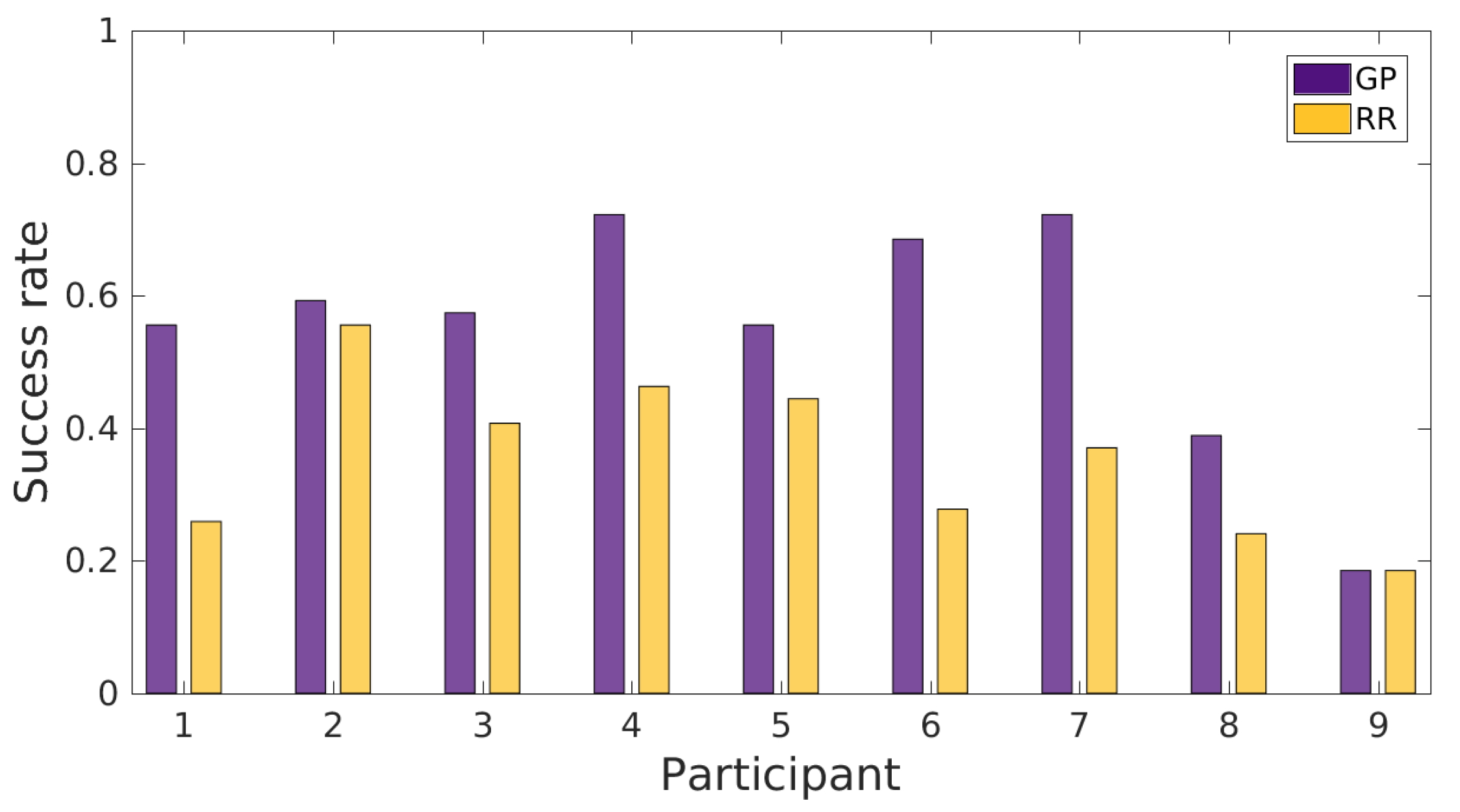
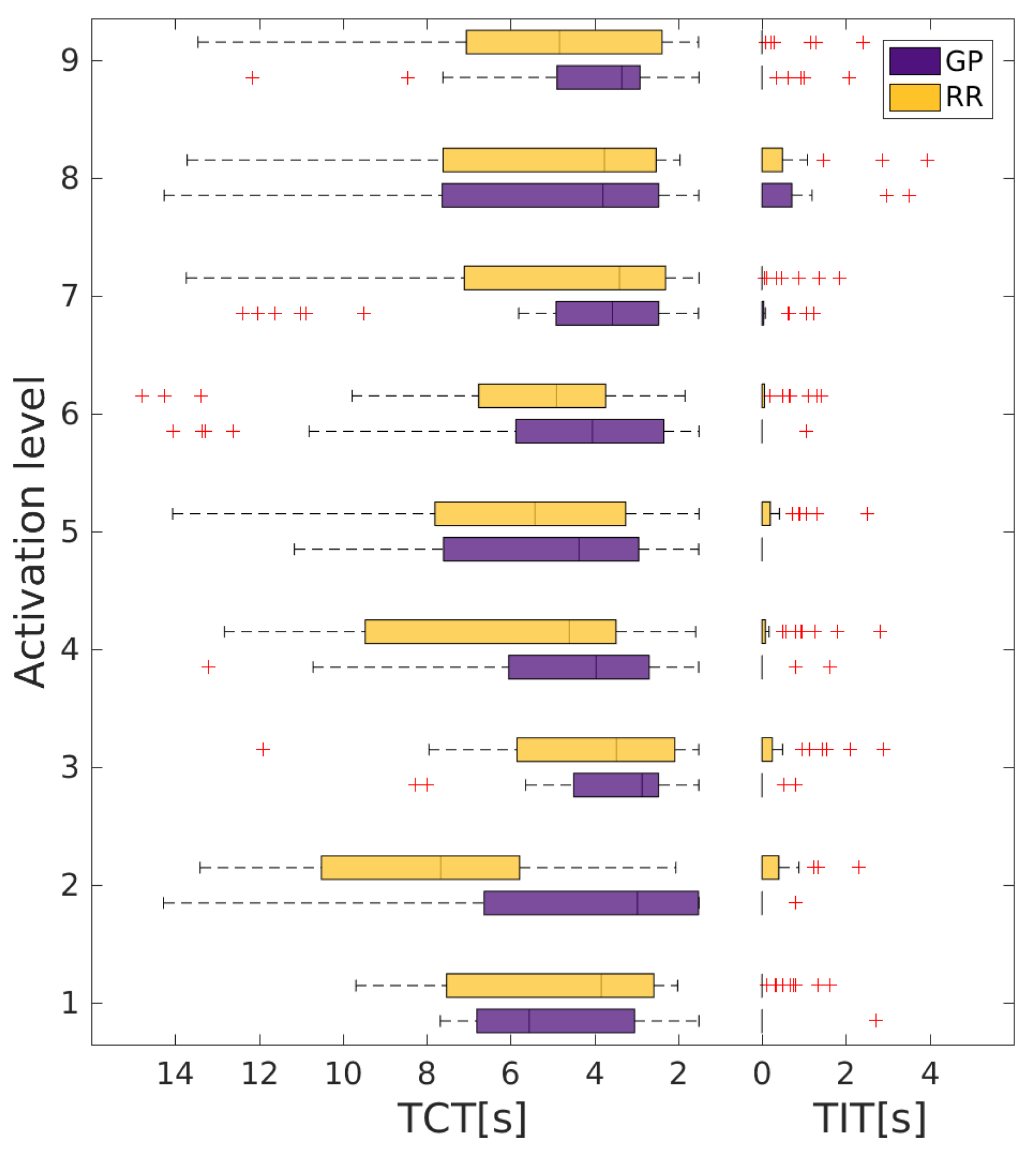
5.1. Experiment 1: Real-Time Goal-Reaching Task with Tactile Myography
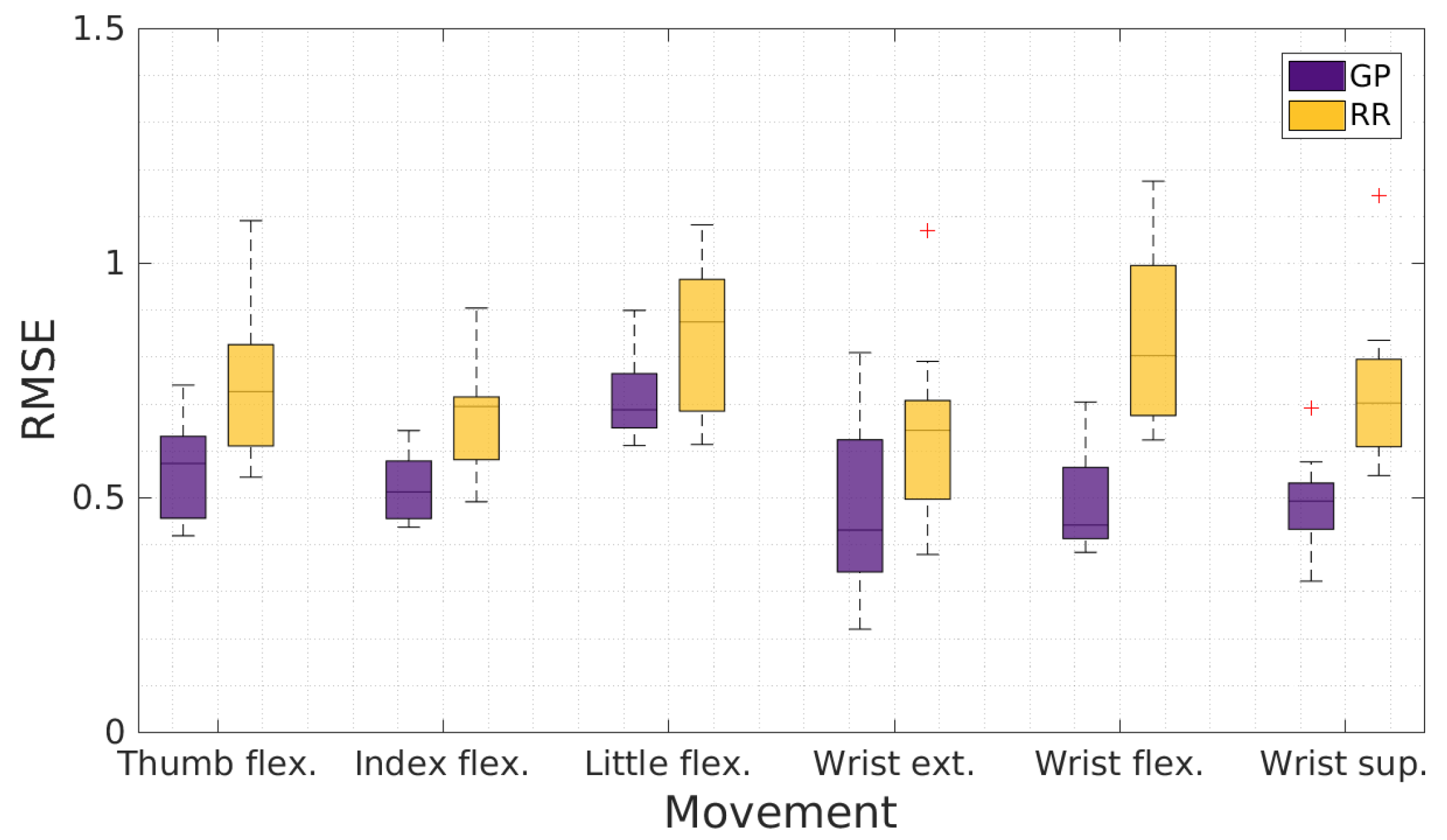
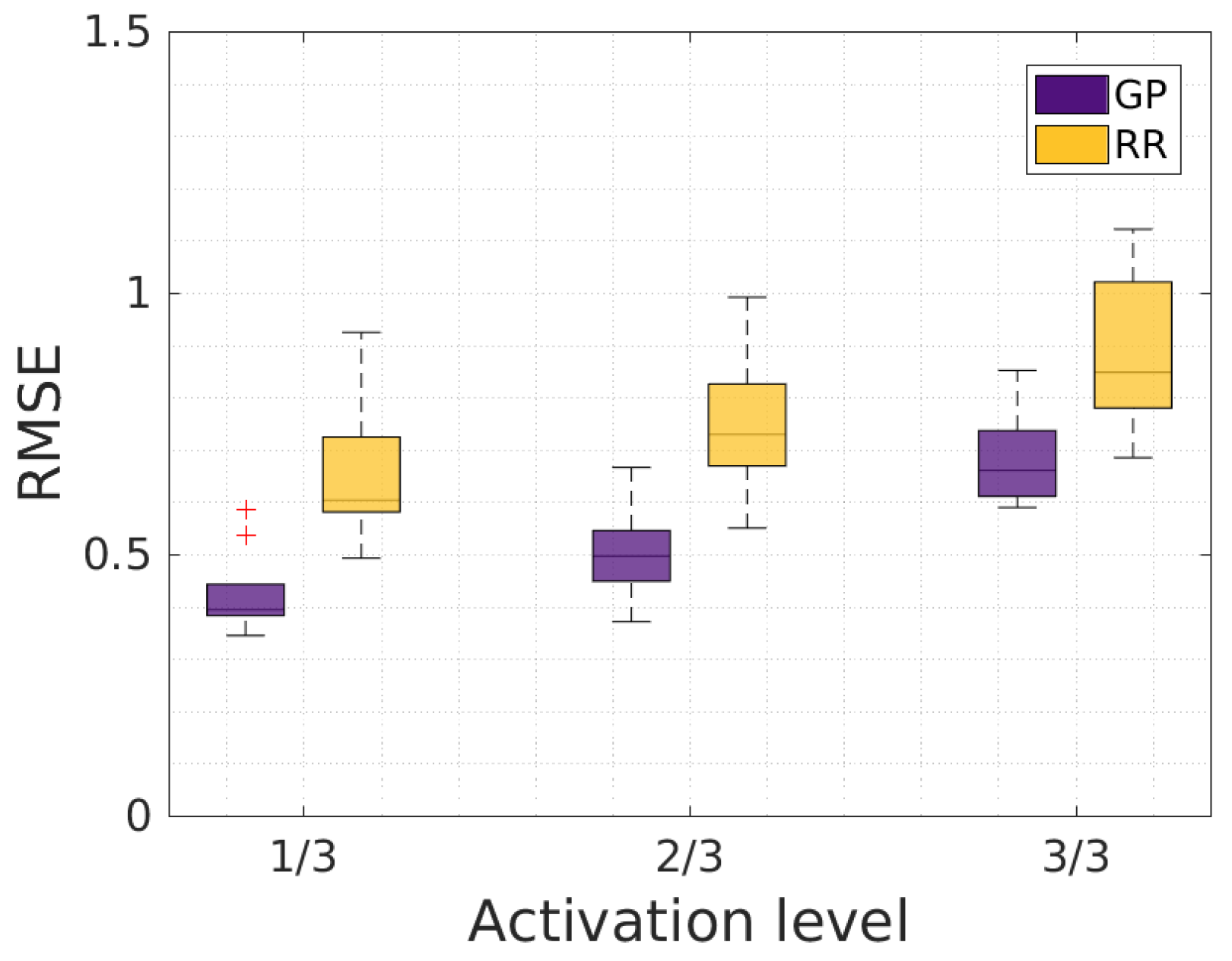
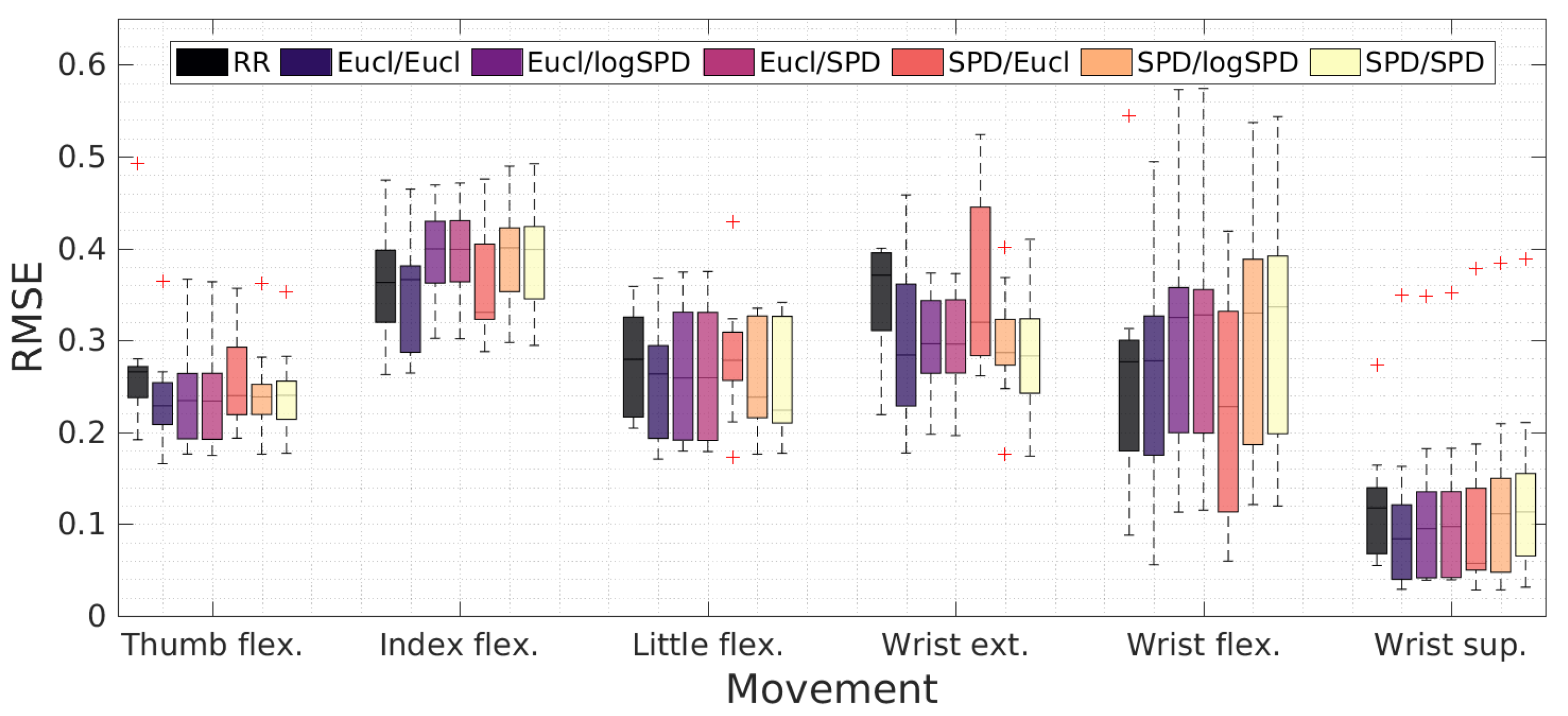
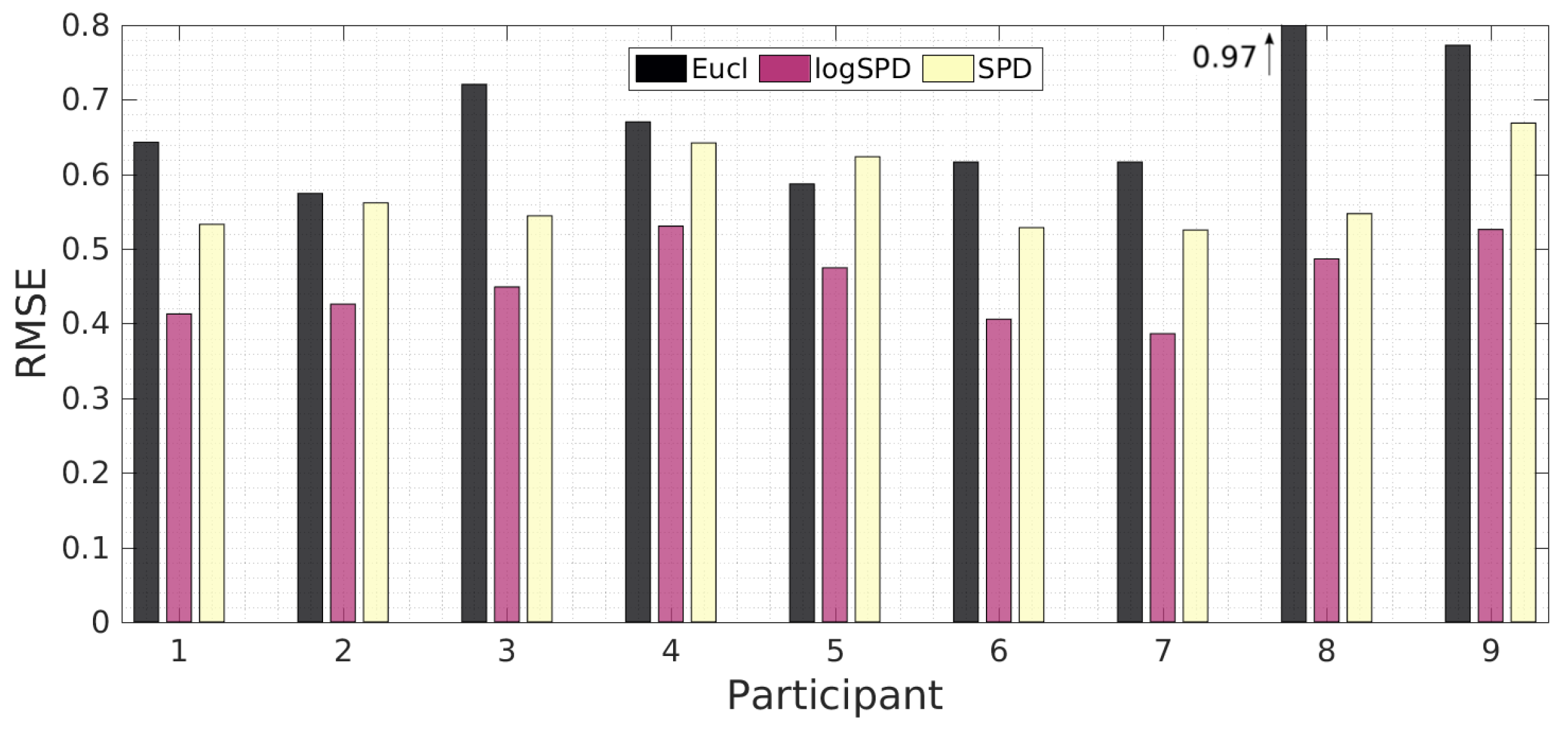
5.2. Experiment 2: Combination of Electromyography and Tactile Myography
6. Discussion
7. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| sEMG | Surface electromyography |
| TMG | Tactile myography |
| RKI | Residual kinematic imaging |
| ADC | Analog-to-digital converter |
| DOF | Degree of freedom |
| RR | Ridge regression |
| GPR | Gaussian process regression |
| RBF | Radial basis function |
| Eucl | Euclidean |
| SPD | Symmetric positive definite matrix |
| KL | Kullback–Leibler divergence |
| SR | Success rate |
| TCT | Time to complete task |
| TIT | Time in the target |
| RMSE | Root-mean-square error |
Appendix A





References
- Atzori, M.; Gijsberts, A.; Kuzborskij, I.; Elsig, S.; Mittaz Hager, A.G.; Deriaz, O.; Castellini, C.; Müller, H.; Caputo, B. Characterization of a Benchmark Database for Myoelectric Movement Classification. IEEE Trans. Neural Syst. Rehabilit. Eng. 2015, 23, 73–83. [Google Scholar] [CrossRef] [PubMed]
- Jiang, N.; Rehbaum, H.; Vujaklija, I.; Graimann, B.; Farina, D. Intuitive, Online, Simultaneous and Proportional Myoelectric Control Over Two Degrees-of-Freedom in Upper Limb Amputees. IEEE Trans. Neural Syst. Rehabilit. Eng. 2014, 22, 501–510. [Google Scholar] [CrossRef] [PubMed]
- Amsuess, S.; Vujaklija, I.; Goebel, P.; Roche, A.; Graimann, B.; Aszmann, O.; Farina, D. Context-Dependent Upper Limb Prosthesis Control for Natural and Robust Use. IEEE Trans. Neural Syst. Rehabilit. Eng. 2016, 24, 744–753. [Google Scholar] [CrossRef] [PubMed]
- Ameri, A.; Scheme, E.J.; Kamavuako, E.N.; Englehart, K.B.; Parker, P.A. Real-Time, Simultaneous Myoelectric Control Using Force and Position-Based Training Paradigms. IEEE Trans. Biomed. Eng. 2014, 61, 279–287. [Google Scholar] [CrossRef] [PubMed]
- Krasoulis, A.; Nazarpour, K.; Vijayakumar, S. Towards Low-Dimensional Proportional Myolelectric Control. In Proceedings of the IEEE International Conference on Engineering in Medicine and Biology Society (EMBS), Milano, Italy, 25–29 August 2015. [Google Scholar]
- Santello, M.; Bianchi, M.; Gabiccini, M.; Ricciardi, E.; Salvietti, G.; Prattichizzo, D.; Ernst, M.; Moscatelli, A.; Jörntell, H.; Kappers, A.; et al. Hand synergies: Integration of robotics and neuroscience for understanding the control of biological and artificial hands. Phys. Life Rev. 2016, 17, 1–23. [Google Scholar] [CrossRef] [PubMed]
- Peerdeman, B.; Boere, D.; Witteveen, H.; Hermens, H.; Stramigioli, S.; Rietman, H.; Veltink, P.; Misra, S. Myoelectric forearm prostheses: State of the art from a user-centered perspective. J. Rehabilit. Res. Dev. (JRRD) 2011, 48, 719–737. [Google Scholar] [CrossRef]
- Phillips, S.L.; Craelius, W. Residual kinetic imaging: A versatile interface for prosthetic control. Robotica 2005, 23, 277–282. [Google Scholar] [CrossRef]
- Wininger, M.; Kim, N.H.; Craelius, W. Pressure signature of forearm as predictor of grip force. J. Rehabilit. Res. Dev. 2008, 45, 883. [Google Scholar] [CrossRef]
- Kõiva, R.; Riedenklau, E.; Viegas, C.; Castellini, C. Shape Conformable High Spatial Resolution Tactile Bracelet for Detecting Hand and Wrist Activity. In Proceedings of the IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015. [Google Scholar]
- Nissler, C.; Connan, M.; Nowak, M.; Castellini, C. Online Tactile Myography For Simultaneous and Proportional Hand and Wrist Myocontrol. In Proceedings of the Myoelectric Control Symposium (MEC), Fredericton, NB, Canada, 15–18 August 2017. [Google Scholar]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Zhao, Q.; Zhou, G.; Adali, T.; Zhang, L.; Cichocki, A. Kernelization of Tensor-Based Models for Multiway Data Analysis: Processing of Multidimensional Structured Data. IEEE Signal Process. Mag. 2013, 30, 137–148. [Google Scholar] [CrossRef]
- Zhao, Q.; Zhou, G.; Zhang, L.; Cichocki, A. Tensor-Variate Gaussian Processes Regression and Its Application to Video Surveillance. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014. [Google Scholar]
- Connan, M.; Ruiz Ramírez, E.; Vodermayer, B.; Castellini, C. Assessment of a Wearable Force- and Electromyography Device and Comparison of the Related Signals for Myocontrol. Front. Neurorobot. 2016, 10, 17. [Google Scholar] [CrossRef] [PubMed]
- Castellini, C.; Kõiva, R. Using a high spatial resolution tactile sensor for intention detection. In Proceedings of the ICORR—International Conference on Rehabilitation Robotics, Seattle, WA, USA, 24–26 June 2013; pp. 1–7. [Google Scholar]
- Jayasumana, S.; Hartley, R.; Salzmann, M.; Li, H.; Harandi, M. Kernel Methods on Riemannian Manifolds with Gaussian RBF Kernels. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 2464–2477. [Google Scholar] [CrossRef] [PubMed]
- Jaquier, N.; Castellini, C.; Calinon, S. Improving Hand and Wrist Activity Detection Using Tactile Sensors and Tensor Regression Methods on Riemannian Manifolds. In Proceedings of the Myoelectric Controls Symposium (MEC), Fredericton, NB, Canada, 15–18 August 2017. [Google Scholar]
- Nielsen, J.L.G.; Holmgaard, S.; Jiang, N.; Englehart, K.B.; Farina, D.; Parker, P.A. Simultaneous and Proportional Force Estimation for Multifunction Myoelectric Prostheses Using Mirrored Bilateral Training. IEEE Trans. Biomed. Eng. 2011, 58, 681–688. [Google Scholar] [CrossRef] [PubMed]
- Sierra González, D.; Castellini, C. A realistic implementation of ultrasound imaging as a human-machine interface for upper-limb amputees. Front. Neurorobot. 2013, 7, 17. [Google Scholar] [CrossRef] [PubMed]
- Jiang, N.; Vujaklija, I.; Rehbaum, H.; Graimann, B.; Farina, D. Is Accurate Mapping of EMG Signals on Kinematics Needed for Precise Online Myoelectric Control? IEEE Trans. Neural Syst. Rehabilit. Eng. 2014, 22, 549–558. [Google Scholar] [CrossRef] [PubMed]
- Ortiz-Catalan, M.; Rouhani, F.; Brånemark, R.; Håkansson, B. Offline accuracy: A potentially misleading metric in myoelectric pattern recognition for prosthetic control. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milano, Italy, 25–29 August 2015; pp. 1140–1143. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Regression Method | SR (%) | TCT (s) | TIT (s) | RMSE |
|---|---|---|---|---|
| GPR () | ||||
| RR |
| sEMG | RMSE | TMG | RMSE | |
|---|---|---|---|---|
| GPR () | GPR () | |||
| GPR () | GPR () | |||
| GPR () | GPR () | |||
| GPR () | ||||
| RR | RR |
| sEMG | |||||||
|---|---|---|---|---|---|---|---|
| TMG | |||||||
| RR | |||||||
| sEMG | Training Distances Comp. Time (s) | Testing Distances Comp. Time (s) |
| TMG | Training Distances Comp. Time (s) | Testing Distances Comp. Time (s) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jaquier, N.; Connan, M.; Castellini, C.; Calinon, S. Combining Electromyography and Tactile Myography to Improve Hand and Wrist Activity Detection in Prostheses. Technologies 2017, 5, 64. https://doi.org/10.3390/technologies5040064
Jaquier N, Connan M, Castellini C, Calinon S. Combining Electromyography and Tactile Myography to Improve Hand and Wrist Activity Detection in Prostheses. Technologies. 2017; 5(4):64. https://doi.org/10.3390/technologies5040064
Chicago/Turabian StyleJaquier, Noémie, Mathilde Connan, Claudio Castellini, and Sylvain Calinon. 2017. "Combining Electromyography and Tactile Myography to Improve Hand and Wrist Activity Detection in Prostheses" Technologies 5, no. 4: 64. https://doi.org/10.3390/technologies5040064
APA StyleJaquier, N., Connan, M., Castellini, C., & Calinon, S. (2017). Combining Electromyography and Tactile Myography to Improve Hand and Wrist Activity Detection in Prostheses. Technologies, 5(4), 64. https://doi.org/10.3390/technologies5040064