Robust H∞ Control For Uncertain Singular Neutral Time-Delay Systems


1
School of Finance and Mathematics, Huainan Normal University, Dongshanxi Street, Tianjiaan Dist., Huainan 232038, China
2
School of Mathematics and Physics, Anhui Jianzhu University, Hefei 230601, China
*
Author to whom correspondence should be addressed.
Mathematics 2019, 7(3), 217; https://doi.org/10.3390/math7030217
Submission received: 28 December 2018
/
Revised: 21 February 2019
/
Accepted: 21 February 2019
/
Published: 26 February 2019
(This article belongs to the Special Issue Mathematics on Automation Control Systems)
{kind=link}
Abstract
:The present paper attempts to investigate the problem of robust H control for a class of uncertain singular neutral time-delay systems. First, a linear matrix inequality (LMI) is proposed to give a generalized asymptotically stability condition and an H norm condition for singular neutral time-delay systems. Second, the LMI is utilized to solve the robust H problem for singular neutral time-delay systems, and a state feedback control law verifies the solution. Finally, four theorems are formulated in terms of a matrix equation and linear matrix inequalities.
1. Introduction
Singular systems are more convenient than regular ones for describing many practical systems because a singular system involves both differential equations and algebraic equations. Applications of singular systems can be found in circuit systems, chemical systems, biological systems, robot systems, and power systems [1]. Therefore, many scholars have paid attention to the study of singular systems, and a number of important results have been reported (see, e.g., [2,3,4]).
As is known to all, a time delay frequently arises in practical systems and is often the cause of instability and poor performance. Hence, the stability problem for a singular system with a time delay has attracted many researchers’ attention in the past several decades (see, e.g., [5,6,7,8,9,10]).
In some real physical systems and industrial systems, disturbances that are attributable to external signals may cause instability and degrade the system’s performance. Hence, the effect of disturbances on the considered systems should be taken into account. Since H control is used to keep systems less sensitive to disturbances, problems of H control for time-delay systems have been widely explored, and findings related to these problems have been reported many times in the literature [11,12,13,14,15,16,17,18,19,20,21,22,23,24,25] as a result of their frequent applications in power systems, large-scale systems, and circuit systems. Recently, scholars (such as [11,12,13,14,15]) have started to study the H problem for singular time-delay systems by using a linear matrix inequality () approach, which yields not only the existence conditions valid for singular systems’ regular problems but also characterizations of H controllers, leading to a convex optimization problem [16,17,18,19,20,21,22,23,24,25,26,27,28,29].
The robust H control problem for uncertain singular time-delay systems was investigated by Ji et al. in [24], where the condition was obtained by constructing a degenerate Lyapunov function on the basis of [23]. However, the condition does not satisfy , which renders the design procedure of the LMI law comparatively untenable. Moreover, the problem for singular neutral time-delay systems was not investigated in [24], and some information about the condition itself cannot be revealed even if the method can be applied to a singular neural time-delay system. Also, because of the continuity of the function, it is more difficult to study the neural time-delay system than it is to study singular time-delay systems. Consequently, it is of more theoretical and practical significance to study singular neutral time-delay systems as compared with time-delay systems.
The present paper derives a sufficient condition for the existence of the H controller on the basis of the approach combined with a class of novel augmented Lyapunov functions, which thus facilitate the attainment of the H controller using the Matlab toolbox combined with a matrix equation.
2. Problem Statement and Preliminaries
Consider the following uncertain singular neutral time-delay system:
where is the state vector; is the control input vector; is the disturbance input vector belonging to ; is the control output vector; is a constant time delay; is a vector-valued initial function belonging to are constant matrices with appropriate dimensions, where E may be singular and is assumed to be ; and are unknown matrices representing time-varying parameter uncertainties and can be described as
where G and are known constant matrices and is a known matrix with Lebesgue measurable elements and satisfies
It is assumed in the present paper that for the arbitrary positive-definite matrix .
The parametric uncertainties are said to be admissible if Equations (2) and (3) both hold.
Next is a discussion of the system in Equation (1) with no force counterpart item. First, the system is described as Equation (4),
The following definitions and lemmas are very useful for deriving the main results of this paper.
Definition 1
([1]). The pair (E, A) is known as regular if is not identically zero. The pair is known as impulse free if .
Definition 2
Remark 1.
Since is regular and impulse free, there exist two nonsingular matrices Q and P such that the system in Equation (4) is equivalent to
with the coordinate transformation
and
where Obviously, the system in Equation (5) has a unique solution on .
Definition 3
([29]). If a matrix X satisfies the Penrose condition , then there exists a solution to the generalized inverse for or inverse of A, and thus, the matrix X is denoted by X = A or X , where denotes the set of all inverse of A.
Lemma 1
([24]). For a given symmetry matrix , where have appropriate dimensions, . Then, the following two conditions are equivalent.
Lemma 2
([18]). For any , the inequality holds.
Therefore, Lemma 3 can be obtained by using a method similar to that in J. Lee (1994).
Lemma 3.
For given matrices , and F of appropriate dimensions,
for all F satisfies if there exist positive numbers such that
Proof.
By Lemma 2, for there exists an such that
hold simultaneously. Thus,
can be obtained. Similarly, there exist positive numbers such that the following inequalities also hold
□
Lemma 4
([29]). Let A∈ C, B∈ C, D∈ C . Then, the matrix equation is consistent if and only if, for some A and B, is satisfied, in which case the general solution is for arbitrary Y ∈ C .
Robustcontrol problem. The present paper attempts to address the robust control problem by considering the linear state feedback control law as
to construct K such that in Equation will
stabilize the resultant closed-loop system and
guarantee the performance under the zero-initial condition of and for any nonzero and for all admissible parameter uncertainties satisfying Equations and .
3. Results
In the following, the problem of robust control is considered for the singular neutral system in Equation with and .
Theorem 1.
Consider the system in Equation with and . For a given scalar , the system in Equation is regular, impulse free, and stable, and the norm from to is less than γ, if there exist symmetric positive-definite matrices and matrices such that the following linear matrix inequality holds:
where
and is any matrix that has full column rank and satisfies .
Proof.
The nonlinear singular system (Equation ) is proved below to be regular and impulse free. Since rank(E) = r , there exist two nonsingular matrices F and G such that
Then, V can be parameterized as
where is any nonsingular matrix. Next,
can be defined. Since and , the following inequality can be formulated easily:
.
Pre- and post-multiplying by F and F, respectively, yields
From [17], the following matrix inequalities can be formulated easily:
and thus, is nonsingular.
Then, it can be proved that
which implies that is not identically zero and . Then, the pair is regular and impulse free, which implies that the system in Equation (1) is regular and impulse free.
In the following, the system in Equation with and is proved to be asymptotical with the condition of and an performance under the zero-initial condition of and for any nonzero . Construct a Lyapunov–Krasovskii function candidate as follows:
where P , Q , R , and L . From this follows the derivation of with respect to t along the trajectory of the system in Equation with the condition of and that
For the system in Equation , the following holds
where
For , it can be deduced that
where S is any matrix with appropriate dimensions.
Noting the zero-initial condition of , , and , then
By substituting Equations and into , the following can be obtained:
where , with
- .
If , there exists a scalar such that ; thus, according to [3], the system in Equation with and is asymptotically stable. By Lemma 1, is equivalent to .
It is easy to obtain from the result of Theorem 1 the following conclusion about the performance analysis. □
Theorem 2.
Consider the system in Equation with . For a given scalar , the system is regular, impulse free, and stable, and the norm from to is less than γ if there exist symmetric positive-definite matrices P, Q, R, L and matrices , and such that the following linear matrix inequality holds:
where is as defined in Theorem 1.
Proof.
It follows from Equation by Lemma 1 that
where is as defined in Theorem 1, and
.
It follows from Equation by Lemma 3 that
where
and is any matrix that has full column rank and satisfies .
In the following, the robust synthesis problem of the system in Equation is to be considered for the system in Equation with . □
Theorem 3.
Consider the system in Equation (1) with . For a given scalar , if there exist symmetric positive-definite the matrices and matrices such that the matrix equation and the linear matrix inequality in the following hold simultaneously,
then, the control law
(where Y is an arbitrary matrix of appropriate dimension, I is a unit matrix, is any matrix with full column rank and satisfies , and ) stabilizes the singular neutral system and guarantees the norm bound within γ in the closed-loop system.
Proof.
Substituting the state feedback control law into the system in Equation with , the closed-loop system
can be obtained. Since , the pair is the same as the pair in that they are both regular and impulse free. Therefore, the solutions of are equivalent to the solutions of . According to the definition the norm, the norm of the system in Equation can be given as
which is equal to
Hence, it can be shown that the regularity, impulse-free state, asymptotic stability, and performance of the system in Equation are equivalent to the following system regularity, impulse-free state, asymptotic stability, and performance; that is,
Then, by replacing A by (A+BK), by , D by , E by , C by in Equation (7) and setting , Matrix Equation (17) and Linear Matrix Inequality (18) can be directly obtained.
Now, the result for the problem of robust control for the system in Equation (1) is given. According to Theorem 3, the robust performance of the system (Equation ) will be stated as follows. □
Theorem 4.
Consider the uncertain singular neutral time-delay system (Equation (1)). For a given scalar , if there exist symmetric positive-definite matrices and matrices and such that the matrix equation and the linear matrix inequality in the following hold simultaneously,
where then the control law
where Y is an arbitrary matrix of appropriate dimension, I is a unit matrix, is any matrix with full column rank and satisfies
stabilizes the uncertain singular neutral system and guarantees the norm bound within γ in the closed-loop system.
Proof.
By replacing A by , by , B by , and C by in Theorem 3, the following matrix inequality can be obtained.
where is as defined in Equation , and
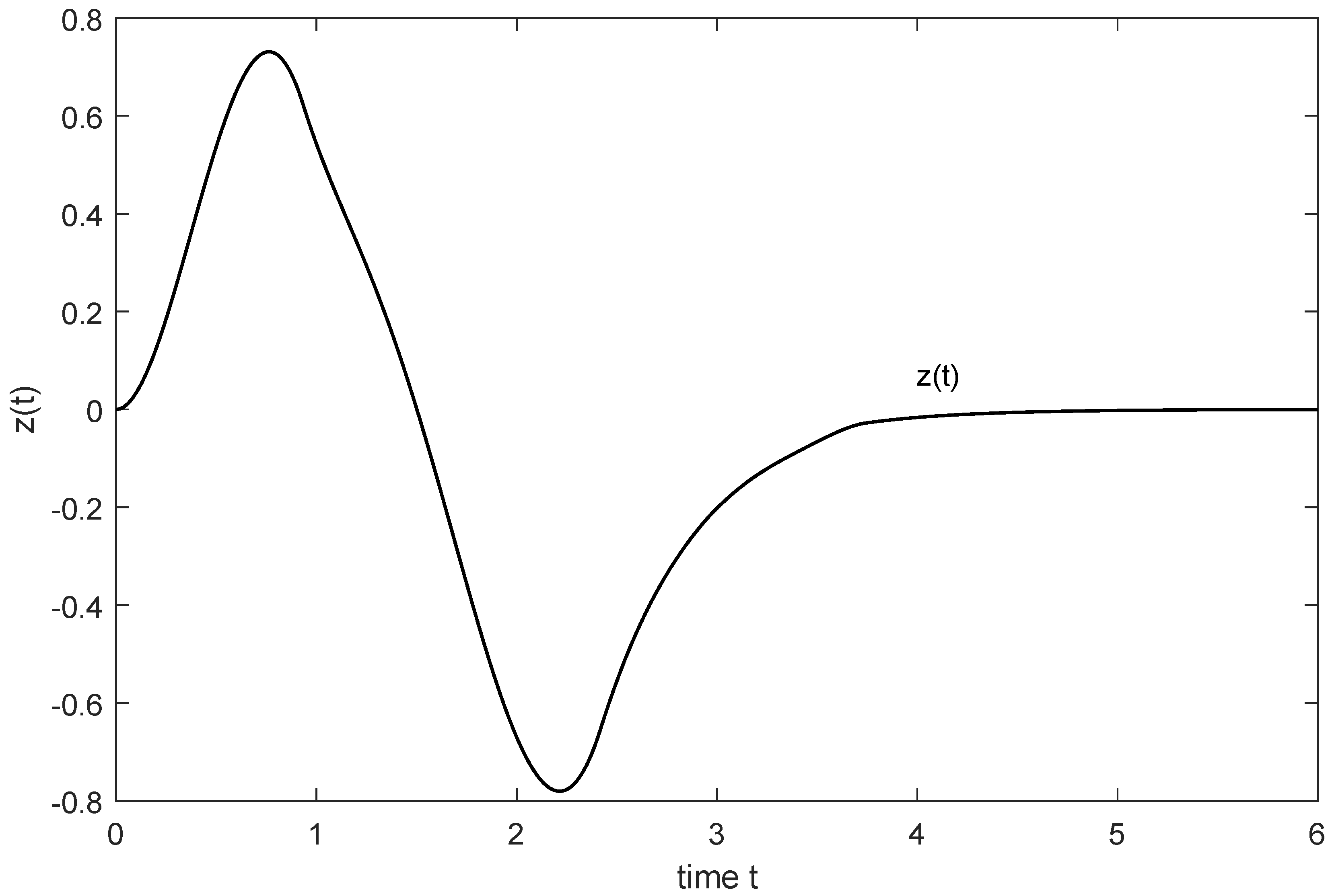
4. Numerical Illustration
The following numerical example is presented to illustrate the usefulness of the proposed theoretical results.
Example 1.
Consider the system in Equation (1) with the parameter matrices as follows: , . , , .
Let . By using Theorem 4 and the Matlab LMI Toolbox, the gain matrices can be designed as .
5. Conclusions
The problem of robust control for an uncertain singular neutral system is investigated. A new approach is introduced in order to ensure the singular system (Equation ) is regular and impulse free. On that basis, the matrix equation and an ensure that the system, which is asymptotic and guarantees the norm bound within in the closed-loop system for all admissible parameter uncertainties, can be obtained. The needed controller can be constructed by solving the matrix equation and the . It should be emphasized that the controller has a generalized inverse form, which is different from the result of [17]. Also, this method can be applied to some practical systems.
Author Contributions
These authors contributed equally to this work.
Funding
This work was supported by the China Postdoctoral Science Foundation (2017M621579), the Postdoctoral Science Foundation of Jiangsu Province (1701081B), the Project of Anhui Jianzhu University (2016QD116 and 2017dc03).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Dai, L. Singular Control System; Springer: New York, NY, USA, 1989. [Google Scholar]
- Xia, Y.; Boukas, E.; Shi, P.; Zhang, J. Stability and stabilization of continuous singular hybrid systems. Automatica 2009, 45, 1504–1509. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Xia, Y.Q. Design of reduced-order l2−l∞ filter design for singular discrete-time systems using strict linear matrix inequalities. IET Control Theory Appl. 2010, 4, 509–519. [Google Scholar] [CrossRef]
- Shen, H.; Su, L.; Park, J.H. Further results on stochastic admissibility for singular Markov jump systems using a dissipative constrained condition. ISA Trans. 2015, 59, 65–71. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Dooren, P.; Stefan, R.; Lam, J. Robust stability and stabilization for singular systems with state delay and parameter uncertanity. IEEE Trans. Autom. Control 2002, 47, 1122–1128. [Google Scholar]
- Wei, J. Eigenvalue and stability of singular differential delay systems. J. Math. Anal. Appl. 2004, 297, 305–316. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Xue, A.; Lu, R. Absolute stability criteria for a calss of nonlinear singular systems with time delay. Nonlinear Anal. Theory Methods Appl. 2009, 70, 621–630. [Google Scholar] [CrossRef]
- Feng, Y.; Zhu, X.; Zhang, Q. Delay-dependent stability criteria for singular time-delay systems. Acta Autom. Sin. 2010, 36, 433–437. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Lin, C.; Chen, B. A neutral system approach to stability of singular time-delay systems. J. Franklin Inst. 2014, 351, 4939–4948. [Google Scholar] [CrossRef]
- Wang, B.; Yan, J.; Cheng, J.; Zhong, S. New criteria of stability analysis for generalized neural networks subject to time-varying delayed signals. Appl. Math. Comput. 2017, 314, 322–333. [Google Scholar] [CrossRef]
- Choi, H.H.; Chung, M.J. An LMI approach to H∞ controller design for linear time-delay systems. Automatica 1997, 33, 737–739. [Google Scholar] [CrossRef]
- Masubuchi, I.; Kamitane, Y.; Ohara, A.; Suda, N. H∞ control for descriptor systems:a matrix inequality. Automatica 1997, 33, 669–673. [Google Scholar] [CrossRef]
- Liu, H.; Shen, Y.; Zhao, X.D. Delay-dependent observer-based H∞ finite-time control for switched systems with time-varying delay. Nonlinear Anal. Hybrid Syst. 2012, 6, 885–898. [Google Scholar] [CrossRef]
- Kim, J.H. Delay-dependent robust H∞ filtering for uncertain discrete-time singular systems with interval time-varying delay. Automatica 2010, 46, 591–597. [Google Scholar] [CrossRef]
- Kim, J.H. Delay-dependent robust H∞ control for discrete-time uncertain singular systems with interval time-varying delays in state and control input. J. Franklin Inst. 2010, 347, 1704–1722. [Google Scholar] [CrossRef]
- Liu, L.L.; Peng, J.G.; Wu, B.W. H∞ control of singular time-delay systems via discretized Lyapunov functional. J. Franklin Inst. 2011, 348, 749–762. [Google Scholar] [CrossRef]
- Wu, Z.G.; Park, J.H.; Su, H.; Song, B.; Chu, J. Mixed H∞ and passive filtering for singular systems with time delays. Signal Process. 2013, 93, 1705–1711. [Google Scholar] [CrossRef]
- Mei, F. Delay-dependent robust H∞ control for uncertain singular systems with state delay. Acta Autom. Sin. 2009, 35, 65–70. [Google Scholar]
- Wu, Z.; Su, H.; Chu, J. Improved results on delay-dependent H∞ control for singular time-delay systems. Acta Autom. Sin. 2009, 35, 1101–1106. [Google Scholar] [CrossRef]
- Fridman, E.; Shaked, U. H∞ control of linear state-delay descriptor systems:an LMI approach. Linear Algebra Its Appl. 2002, 351, 271–302. [Google Scholar] [CrossRef]
- Lee, J.H.; Kim, S.W.; Kwon, W.H. Memoryless H∞ controller for state delayed systems. IEEE Trans. Autom. Control 1994, 39, 159–162. [Google Scholar]
- Huang, S.S.; Lee, T.T. Memoryless H∞ controller for singular systems with delayed state and control. J. Franklin Inst. 1999, 336, 911–923. [Google Scholar] [CrossRef]
- Kim, J.H. New design method on memoryless H∞ control for singular systems with delayed state and control using LMI. J. Franklin Inst. 2005, 342, 321–327. [Google Scholar] [CrossRef]
- Ji, X.F.; Su, H.Y.; Chu, J. An LMI approach to robust H∞ control for uncertain singular time-delay systems. J. Control Theory Appl. 2006, 4, 361–366. [Google Scholar] [CrossRef]
- Guan, X.; Chen, C.; Peng, H.; Fan, Z. Time-delayed feedback control of time-delay chaotic systems. Int. J. Bifurc. Chaos 2003, 13, 193–205. [Google Scholar] [CrossRef]
- Hale, J.K.; Lunel, S.M.V. Introduction to Functional Differential Equations; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Boyd, S.; Ghaoui, L.E.; Feron, E. Linear Matrix Inequalities in System and Control Theory; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1994. [Google Scholar]
- Mahmoud, M. Robust Control and Filtering for Time-Delay Systems; Control Engineering Series; Marcel Dekker: New York, NY, USA, 2000. [Google Scholar]
- Wang, G.; Wei, Y.; Qiao, S.; Lin, P.; Chen, Y. Generalized Inverses: Theorey and Computations; Science Press: Beijing, China, 2004. [Google Scholar]
Figure 1.
The trajectory of of the system in Equation (1).
Figure 1.
The trajectory of of the system in Equation (1).

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Huo, Y.; Liu, J.-B. Robust H∞ Control For Uncertain Singular Neutral Time-Delay Systems. Mathematics 2019, 7, 217. https://doi.org/10.3390/math7030217
AMA Style
Huo Y, Liu J-B. Robust H∞ Control For Uncertain Singular Neutral Time-Delay Systems. Mathematics. 2019; 7(3):217. https://doi.org/10.3390/math7030217
Chicago/Turabian StyleHuo, Yuhong, and Jia-Bao Liu. 2019. "Robust H∞ Control For Uncertain Singular Neutral Time-Delay Systems" Mathematics 7, no. 3: 217. https://doi.org/10.3390/math7030217
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.