1. Introduction
The electromagnetic (EM) imaging technique for geophysical applications is categorized as a geo-electrical method family which can be grouped into two types, active and passive [
1]. The marine controlled-source electromagnetic (CSEM) surveying technique is classified as an active method due to the character of its EM source. In offshore hydrocarbon exploration, marine CSEM is also known as seabed logging (SBL). SBL is an application of the EM technique for marine hydrocarbon prospecting in the deep offshore environment. This application has become a promising tool to detect, characterize, and map offshore hydrocarbon-filled reservoirs. Since the early 2000s, it has gained wide acceptance in the oil and gas industry. Due to rapid development of the EM technique, it is now a well-established surveying technique for offshore hydrocarbon exploration based on the technology of horizontal source and receiver sensors (see [
2,
3,
4] for references). Generally, this application detects the contrasts of the electrical resistivity, exploiting the fact that a hydrocarbon-filled reservoir has a higher resistivity than its surroundings. The traditional surveying technique (i.e., seismic surveying) uses acoustic waves to acquire structural information about the lithology of the subsurface beneath the seabed, while SBL applications can provide information of pre-drilling discrimination whether the potential reservoir (i.e., prospect) contains hydrocarbon or not.
SBL application utilizes a powerful electric dipole to continuously transmit a periodic low-frequency EM signal through seawater and the subsurface in all directions. The frequency exercised in the SBL application is usually between 0.01 Hz and 10 Hz. Typically, the electric dipole transmitter is towed at an elevation of 30–50 m above the seabed surface. Due to the behavior of the EM waves, the geometry characteristics of the highly-resistive layer (e.g., hydrocarbon) under the seabed can be identified. The electric and magnetic receivers are positioned on the seabed to record the transmitted EM signal. These receivers can record different types of waves, such as direct waves, air waves, and the reflected and refracted wave, from the subsurface interaction. Detection of the reflected and refracted waves from the highly-resistive body beneath the seabed is the basis and main contribution to the SBL data interpretation. According to [
2], this wave is known as a guided wave. When this wave enters a hydrocarbon-saturated reservoir, it flows along the resistive layer before reaching the seabed receivers. Thus, the receivers contain information of the geological structure underneath the seabed.
In the application of geophysics, numerical modelling is the most crucial part, especially when it comes to the context of subsurface/reservoir modelling. The finite element (FE) method is one of the most famous techniques exercised in EM problems due to its capability of modelling such a complex geological structure in the deep offshore environment. This computational method exercises unstructured grids so that it can realistically replicate the complex structure [
5]. The robustness of the FE method is undoubted; however, this technique requires very high computational time to obtain linear solutions. Researchers in [
6,
7] mentioned that the most time-consuming part in the FE algorithms is solving the linear equations system, not to mention for inversion scheme since it needs multiple EM forward solutions [
7]. Computer simulations from complex computer models usually are either very costly or time-consuming or both. Consequently, only very few realizations of input and output combinations of the computer simulation outputs are available after a very lengthy computational time. Furthermore, reservoir models are constructed based on a very large amount of noisy data through computer simulations. Understanding the unknown functions from multiple possible outputs of reservoir models is the other crucial part, especially to quantify the uncertainties of the data. When the depth of the resistive body gets deeper, the EM response become very difficult to distinguish with a reference response (a response from a non-hydrocarbon region). Due to these constraints, many researchers have looked forward to reducing the computational time in the data interpretation. Researchers in [
5] mentioned that if there is a possibility to de-risk a known prospect, any additional information that is able to be collected will be beneficial to the exploration.
Thus, in order to seek the most favorable balance between modelling accuracy associated with uncertainty quantification in the forward modelling and computational cost involved in the computer simulations, we propose a methodology of model calibration between a well-known stochastic process, namely Gaussian process (GP) regression, and computer experiments using computer simulation technology (CST) software in the magnitude versus offset (MVO) analysis. Note that the SBL data interpretation approach is commonly based on analyzing the normalized magnitude versus offset (MVO) plot [
8]. This is based on the assumption that if the reference EM magnitude can be obtained from a region where the absence of the hydrocarbon-filled reservoir has been confirmed, the normalized MVO could determine the presence of the resistive body. This happens because the attenuation of the electric field (E-field) when the hydrocarbon reservoir is present is lower with distance compared to the E-field attenuation at the reference region. In the literature, the GP methodology was successfully employed to estimate the EM responses in the EM forward modelling (refer to [
9,
10] for details), however, applying model calibration of the probabilistic technique and the simulation modelling from the computer experiment on MVO analysis of multi-low-frequency EM data is a novel methodology in the EM application.
Basically, this paper preferentially highlights the MVO analysis of one-dimensional (1D) SBL data in the risk analysis by calibrating models developed by the stochastic process and the CST outputs. Although the current numerical techniques are very powerful and capable of providing good representation of the marine CSEM models, this attempt is very helpful in certain ways especially when the data are insufficient. Rather than acquiring the SBL data using computer simulation software for all possible parameters (e.g., offset, depth, frequency etc.) which consequently requires high computational time due to the complexity of its deterministic models, stochastic process of multivariate GP regression methodology is more efficient where it is capable of providing reliable information of the EM responses with uncertainty quantification and has low time consumption. Hence, it could reduce the data-processing time of acquiring EM responses in the SBL simulation. The main idea of this research work is that two-dimensional (2D) GP regression is used to estimate and model the EM profile at untried low transmission frequencies (0.0625–0.5 Hz) by utilizing the tried CST computer outputs as the prior information. Then, the GP is fitted in the MVO plots to quantify the uncertainty of the presence of the hydrocarbon in terms of variance in order to understand the behavior of the EM responses towards multi-low-frequency EM signals (especially at a hydrocarbon depth of 3000 m) in hydrocarbon detection. Hence, the most suitable transmission frequency that can give the best model resolution for hydrocarbon detection in various depths could be pre-identified before exploration is done. This could be implemented in scanning or risk analysis involved in the SBL application to explore the prospects. The section below briefly discusses the literature on the GP and the CST software.
2. Model Calibration
Computer experiments are not new among scientists, engineers, and researchers around the world. For decades, computer experiments have successfully been used in the application of science, technology, and engineering. Nowadays, scientists prefer to utilize computer simulations that involve mathematical models rather than doing case study observations or conducting physical experiments. The main reason for using computer simulations is that they can be implemented in any circumstances, including experiments that are impossible to be done physically in a real situation. Many factors can be considered as major contributions to the increase of usage of the computer simulations, such as long-term cost effect, safety issues, low time taken for the data acquisition, etc. As early as the 1980s, computer codes that represented a model of fluid-dynamics for flames had been described by researchers in [
11]. They mentioned that the computer code was able to solve a complex set of partial differential equations (PDEs) where the input variables consisted of parameters for five different chemical reactions corresponding to the velocity of the flames. For additional literature, [
12] described several other research works in different applications that utilized computer experiments to simulate physical experiments/phenomena for designing and predictive purposes.
Computer experiments are run by means of computer code and highly-developed theories of mathematics, physics, and engineering. Researchers in [
12] and subsequent works modeled the computer output,
, which depended on the input parameter,
, as the sum of regression terms,
, and stochastic component,
. The regression part depends on the known functions,
, where
. Thus, the computer output model is defined by Equation (1):
where
represents a random stochastic process with zero mean and covariance,
From Equation (2),
is the correlation function between
and
. The idea behind this concept is although
is a deterministic function, the complex departures of
from the regression part may bear a resemblance to the realization of an appropriately-chosen stochastic process,
. There are a lot of choices of stochastic process, but the Gaussian process (GP) is the most famous choice of
as the distribution of each
is treated and assumed as a Gaussian (normal) distribution with a mean function and a covariance function. Researchers in [
13] mentioned that GP can become a surrogate model for any intricate mathematical models that require lengthy computational time to solve. The features of being flexible to represent the computer output,
, and easy to obtain analytical formulas make the GP methodology a very popular stochastic process.
Based on the literature, there are many studies related to different aspects of computer experiments and statistical methodology. Researchers in [
12] discussed the prediction of untried points based on kriging equations defined from the GP methodology. Researchers in [
14] also thoroughly discussed predictive and issues obtained in designing equations involved in the computer experiments for choosing correlation function. More recent studies on computer models have focused on the model calibration, measurement of uncertainty, and model validation for multivariate and functional outputs. Model calibration is a process of choosing appropriate model parameters of computer code, so that the real-field data can be well-approximated by the computer model. The main key to this process is the consideration of selecting a good correlation function that can measure the discrepancy between the computer response and the real-field data and accurately mimic actual values (examples can be found in [
15]). Researchers in [
16] also described model calibration for high-dimensional multivariate output. Next is model validation: Model validation is a process of assessing whether data obtained from the computer model approximate the real-field data with an acceptable accuracy or not. As the examples from [
17,
18,
19] explained validation of computer models from a frequentist viewpoint, [
20] discussed the methodology of Bayesian model validation for computer outputs. The details on the GP and the CST software are discussed in
Section 2.1 and
Section 2.2 2.1. Gaussian Process (GP)
GP is a well-known technique that has been applied in many applications. This technique has been adopted in scientific and engineering fields, comprising of machine learning, geo-statistics, electronics, etc. This stochastic technique became very popular due to its capability of being flexible, probabilistic and non-parametric. GP has convenient properties for modelling in statistics applications and machine learning. According to [
21], GP regression has demonstrated outstanding performance in plenty of studies. It is a simple and elegant approach where it works well in modelling non-linear problems for probabilistic networks [
22]. Since GP is a probabilistic kernel machine, it can provide predictive mean and variance through Bayesian inference. Researchers in [
23] mentioned that GP has no restriction on the composition of the mean function and the covariance function. The generic framework provided by the GP can be exercised in many problems/applications especially in regression, interpolation, and prediction where a deterministic function is not able to be obtained [
24].
Here, we provide the literature of GP in applications other than computer experiments. Researchers in [
25] investigated the ability of the GP regression to predict load-bearing piles capacity by comparing performances of the GP, the support vector machine (SVM) approach, and empirical relations. They found that GP regression worked very well in predicting the piles capacity as compared to the SVM and empirical relations. Researchers in [
26] asserted that low cost and low complex proximity reports for received-signal-strength (RSS) threshold were obtained when using GP. In the electronic field, [
27] utilized GP to describe the uncertainty of estimation in the state of health (SOH) of lithium-ion batteries. Next, researchers in [
28] stated that GP was able to reduce the complexity in the computer vision with a better quality of reconstruction. Additionally, this probabilistic approach has also been used in chemical applications. For example, [
29] used GP regression to predict particle diameters of nickel pellets. The findings revealed that analysis using GP and a counting rule was capable of yielding good performance with a small mean absolute percentage error (MAPE). For geophysics problems, researchers in [
30] claimed that GP regression was an efficient approach to obtain reliable information of porosity and permeability in well analysis.
2.2. Computer Simulation Technology (CST) Software
CST EM STUDIO (CST EMS) is a commercial EM software/tool (CST Studio Suite Research Base Pack (CST 2019), Dassault Systèmes, Vélizy-Villacoublay, France) that provides powerful computational solutions to simulate and design low-frequency applications. As described in [
31], this low-frequency solver is capable of discretizing Maxwell’s equations using the finite integration method (FIM). In EM problems, Maxwell’s equations are utilized to predict the propagation phenomenon of low-frequency EM signal (i.e., strength of E-field) travelling through different mediums in order to probe contrast of resistivity. The FIM solves the equations in a finite calculation domain which is in grid cell of hexahedral or tetrahedral mesh element. Maxwell’s equations involved in the software are defined by Equations (3)–(6):
CST software has been used in many applications especially in EM problems due to its user-friendliness and flexibility. Researchers in [
32] stated that CST software can be used to replicate SBL applications to acquire synthetic SBL data/responses. Researchers in [
33] also suggested CST software as the synthetic SBL data acquisition tool. Studies related to the usage of the CST software in EM applications can be found in [
34,
35,
36,
37,
38,
39]. Details of the CST software can be found in [
40].
4. Results and Discussion
The GP algorithms used in this paper was the GPML Matlab Code version 4.2 (2018) written by Rasmussen, C.E. and Nickisch, H. which can be found in [
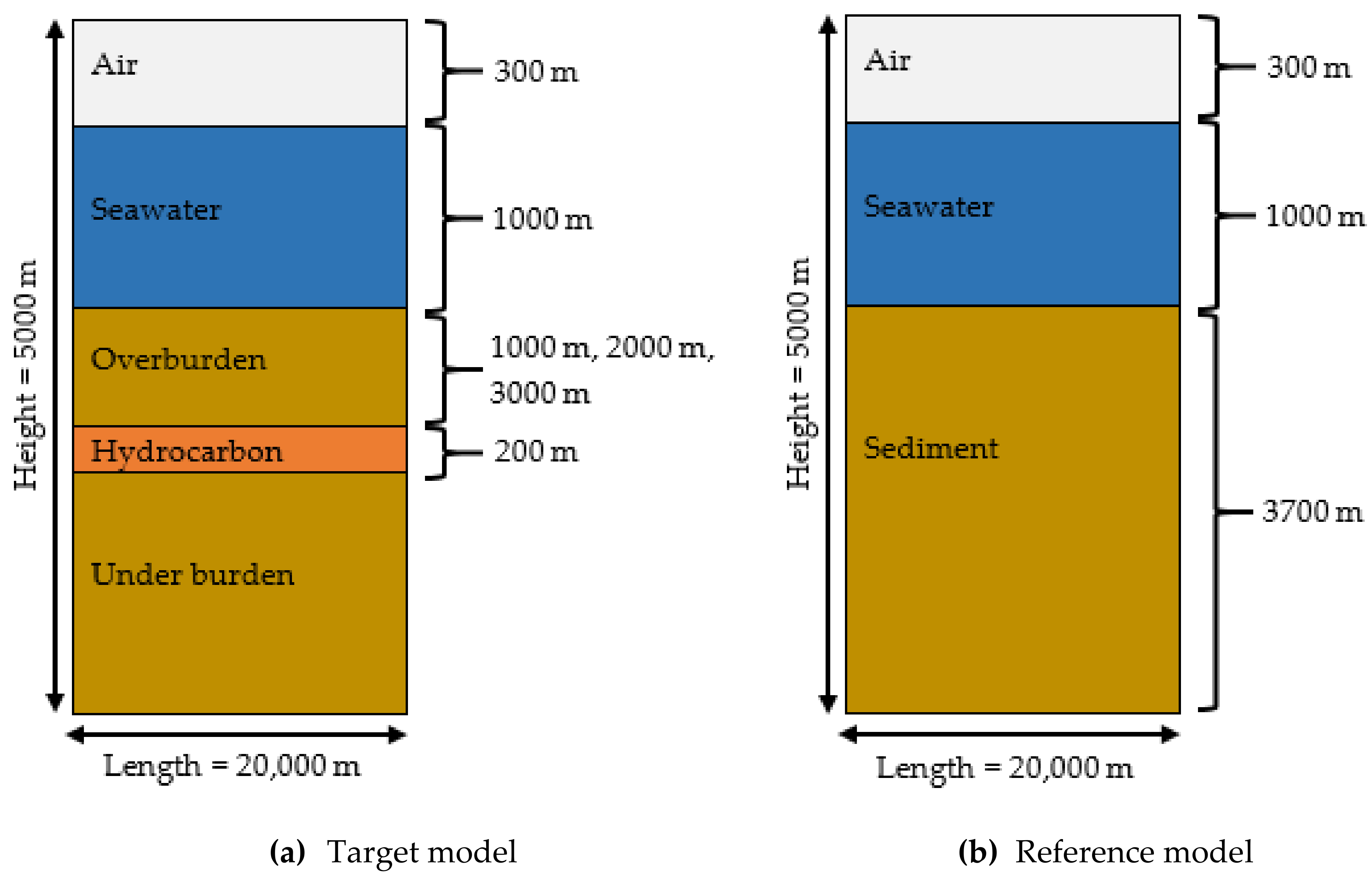
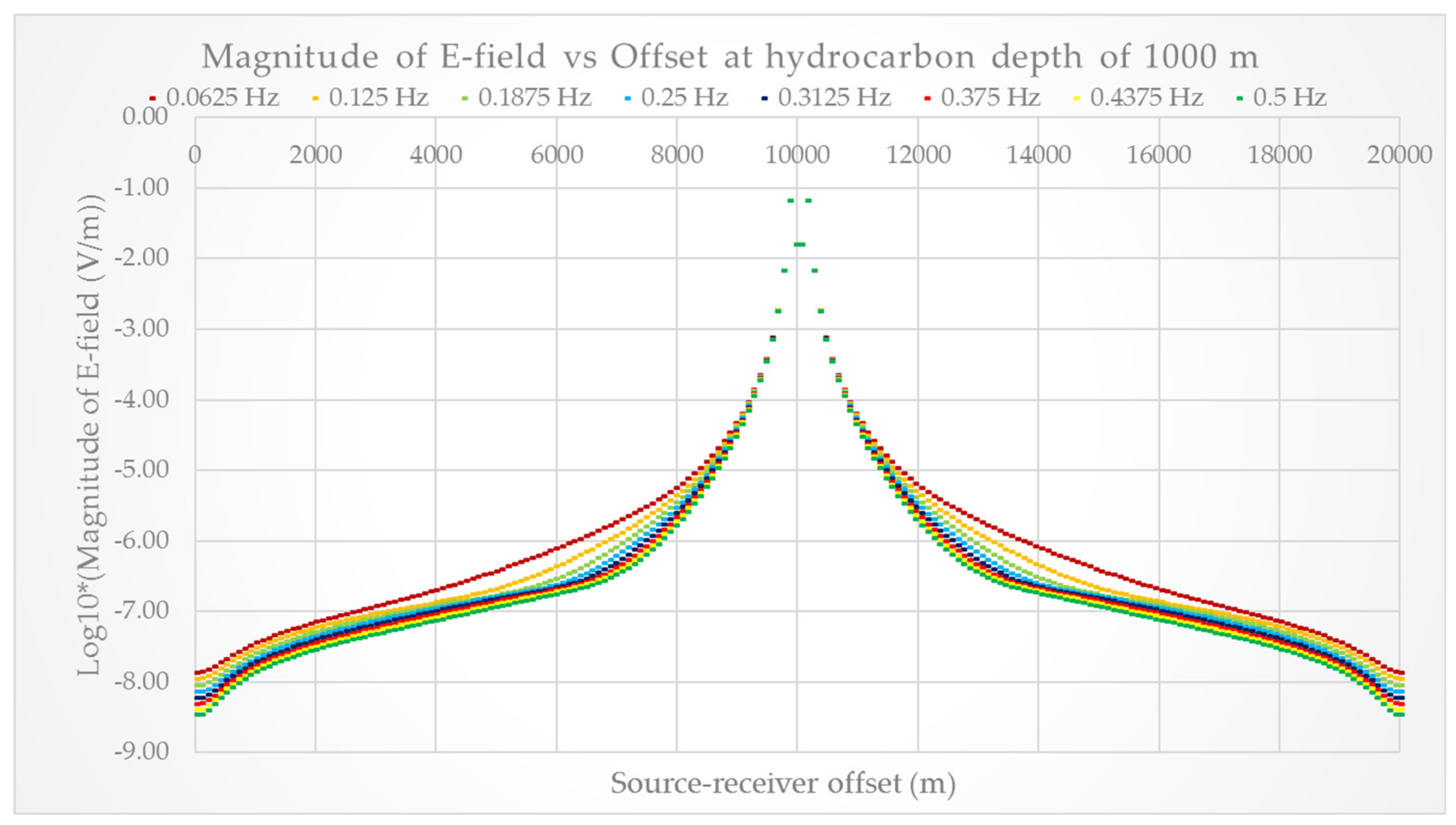
41]. This research work considered the static source-receiver separation distance phenomenon in the SBL modelling where the transmitter was kept stationary at the center of the SBL models. Here, for the target model, we exercised eight (8) different frequencies (0.0625–0.5 Hz with an increment of 0.0625 Hz) at three (3) different depths of hydrocarbon (1000 m, 2000 m, and 3000 m from the seabed) to acquire the prior information. At every hydrocarbon depth, there were eight datasets which represented EM responses from the target models. The CST computer outputs (i.e., EM responses from target models) for all tested frequencies are depicted in
Figure 3,
Figure 4 and
Figure 5.
Figure 3,
Figure 4 and
Figure 5 showed the magnitude of the corresponding horizontal E-field for three different overburden thicknesses and eight tried low transmission frequencies. Logarithmic scale with base 10 was applied on the y-axis to make the data more interpretable. Total computation simulation time for the CST software to compute all the 24 datasets of the EM responses (i.e., eight datasets for each hydrocarbon depth) was approximately 90 min (~1 h and 30 min). The CST computer outputs were in good agreement with the trend of real-field EM responses. The strength of the magnitude of E-field decreases as source-receiver separation distance is further apart. Furthermore, E-field strength also decreases as hydrocarbon depth increases. Since the data were acquired with a source located at the center of the SBL model, the EM responses were symmetrical from 0 m to 10,000 m and 10,000 m to 20,000 m. Therefore, we only considered EM responses from 11,000 m to 19,000 m to be processed and fitted by the GP regression (by assuming that the direct wave dominated the first kilometer of the offset from the center). Two-dimensional (2D) forward GP model was developed to provide the information of EM response for all possible frequencies (tried and untried) from 0.0625 Hz to 0.5 Hz at all tested depths of hydrocarbon. The contour plots of EM response were depicted in
Figure 6,
Figure 7 and
Figure 8.
Based on
Figure 6,
Figure 7 and
Figure 8, the x-axis represented source-receiver separation distance (i.e., offset) and the y-axis represented multi-low-frequency (0.0625–0.5 Hz). The log10 of the magnitudes of the E-field are represented and differentiated by the various color codes. The processing time to acquire these three contour plots was less than five (5) minutes with, in total, 45 datasets of EM response being successfully contoured. This shows that the GP model is capable of providing the multi-low-frequency EM information with low time consumption, while the computer simulation could take a few hours to generate those 45 datasets ((8 tried frequencies + 7 untried frequencies) × 3 depths). The tried and untried frequencies at all tested hydrocarbon depths used in the GP methodology are tabulated in
Table 2. As mentioned earlier, eight frequencies were employed in the SBL modelling as observed information. Note that any frequency can be exercised in the GP methodology as the untried transmission frequency as long as the prior knowledge is capable of providing significant information to the GP regression model.
Next, the reliability of the GP model providing the magnitude of the E-field information at the untried transmission frequencies was examined as well. We chose three random untried frequencies between 0.0625 Hz and 0.5 Hz as listed in
Table 2 which were 0.09375 Hz, 0.28125 Hz, and 0.46875 Hz in order to identify whether the GP can provide the EM profile at untried/unobserved frequency with adequate accuracy or not. As mentioned before, we exercised three different forecast error measurements, which were MSE, MAD, and MAPE for model validation purposes. The results are tabulated in
Table 3.
Based on
Table 3, the MSE, MAD, and MAPE revealed very small values and percentages at all three untried frequencies. On average, the resulting MSE and MAD values were approximately ~0.000069 and ~0.0042, respectively, while the average of MAPE was approximately 0.06% (which is <0.1%). These results indicated that data estimated by the GP were reliable and fit well with the CST outputs even though for the untried/unobserved frequencies. After validating the 2D GP models, the average percentage difference was calculated to compare the trend of the EM responses obtained from the SBL model with the presence of hydrocarbon (target model) and the EM responses obtained from the model without a hydrocarbon layer (reference model). A high-percentage difference indicates the trend that both EM responses are far apart. This means that there is a significant difference between the target and reference EM responses. We used Equation (17) to calculate the average percentage difference (APD):
where
is the number of data. The histogram depicted in
Figure 9 represents the average percentage difference between the target and the reference EM responses for eight (8) transmission frequencies and all tested depths of hydrocarbon.
From
Figure 9, we can see that, overall, the average percentage differences for the frequency of 0.0625 Hz revealed the smallest percentage for every hydrocarbon depth, while the average percentage differences for 0.5 Hz showed the highest percentage for every hydrocarbon depth. By comparing all the average percentage differences at all depths, a frequency of 0.0625 Hz for the hydrocarbon depth of 3000 m (grey) revealed the smallest APD, which was 0.09%, and a frequency of 0.5 Hz for hydrocarbon at the depth of 1000 m (blue) revealed the highest APD, which was 17.30%. These results indicated that the SBL data between the target and the reference responses become very difficult to understand and analyze as the depth of hydrocarbon increases (assuming that the parameters involved were remained). Hence, the model resolution between these two responses (target and reference) decreased as the hydrocarbon depth increased. Therefore, we provided an MVO analysis by utilizing the 1D GP regression model to quantify the uncertainty. In this part, we only showed MVO plots fitted by the GP for a frequency of 0.0625 Hz (the lowest resulting APD for all depths) to numerically analyze the EM responses, as shown in
Figure 10.
Note that the GP model provides predictive variance as an uncertainty quantification. Thus, in this research work, the confidence bar can become an uncertainty quantifier to the MVO analysis whether the hydrocarbon-filled reservoir is significantly present or not. Note that the hydrocarbon-filled reservoir can be inferred as present if variances between the fitted target and the reference responses are not overlapping with each other. Based on
Figure 10, the target and the reference EM responses for a frequency of 0.0625 Hz were very difficult to distinguish when hydrocarbon was 3000 m from the seabed. Since the EM trend and 95% confidence intervals of the EM responses were unclear and difficult to interpret, especially for distinguishing the target response at a depth of 3000 m and the reference model, we provided a zoomed-in scale of the variance for all the fitted EM responses shown in
Figure 10. This is depicted in
Figure 11.
Based on
Figure 11, there were four fitted EM responses indicating the three target responses (for hydrocarbon depths of 1000 m, 2000 m, and 3000 m) and one reference response for a frequency of 0.0625 Hz. By referring to the figure, we can see that the EM responses at a hydrocarbon depths of 1000 m and 2000 m with the reference response were certainly comparable and can be distinguished since the variance of each 1D GP model did not overlap each other. However, at this frequency, it was very difficult to distinguish the SBL data between the target response at a hydrocarbon depth of 3000 m and the reference response. Based on the observation from the fitted 1D GP model (red-colored and magenta-colored curves), we can certainly claim that these responses were distinguishable until at source-receiver offset of approximately less than 18,000 m (<~8 km from the source). At an offset of ~18,000 m or more (~18,000 m–20,000 m), EM responses from the reference model suddenly become higher than the target EM responses. Hence, the EM responses become irrelevant and the confidence bars overlapped each other. From this result, for a frequency of 0.0625 Hz, the predictive variance numerically strengthened the claim that the presence of the hydrocarbon reservoir at a hydrocarbon depth of 3000 m was very difficult to identify at a far source-receiver offset and, hence, the model resolution can become very low at these far offsets. Next, we also studied the anomaly trend obtained from the normalized MVO for a frequency of 0.0625 Hz whether the trend is in good agreement with the resulting predictive variance (depicted in
Figure 10 and
Figure 11) or not, especially when the depth of the hydrocarbon is 3000 m. Therefore, we provided the normalized MVO plot for a frequency of 0.0625 Hz (the lowest tried frequency). This is depicted in
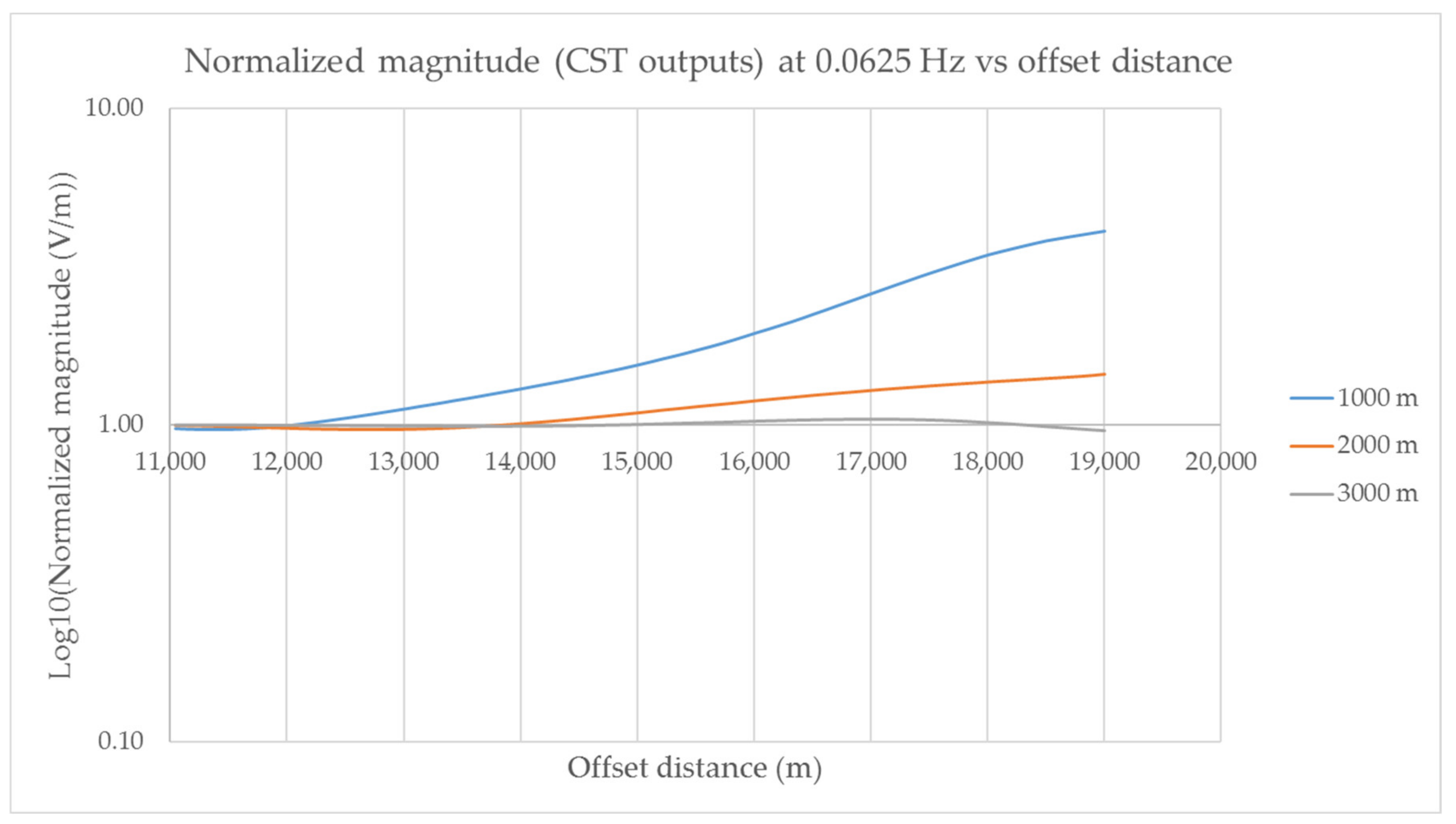
Figure 12.
From
Figure 12, we can see that these three normalized responses showed anomalies where the responses increase gradually as the source-receiver offsets are further apart. The anomalies can be clearly seen when the offset distance was more than ~12,000 m (>~2 km from the source) for the blue-colored response and more than ~14,000 m (>~4 km from the source) for the reddish-yellow-colored response. However, the anomaly of the normalized response at a hydrocarbon depth of 3000 m seemed not as significant when compared to the other two normalized responses. The grey-colored response showed an irrelevant trend of the normalized magnitudes at far offset distances (>~17,500 m) where the normalized magnitudes suddenly decreased at these offsets. This means that when hydrocarbon was at 3000 m and above, it was very difficult to understand the anomaly at the far offsets even though the lowest transmission frequency (0.0625 Hz) was used. This result is in good agreement with the results in
Figure 10 and
Figure 11 (using the GP regression model).
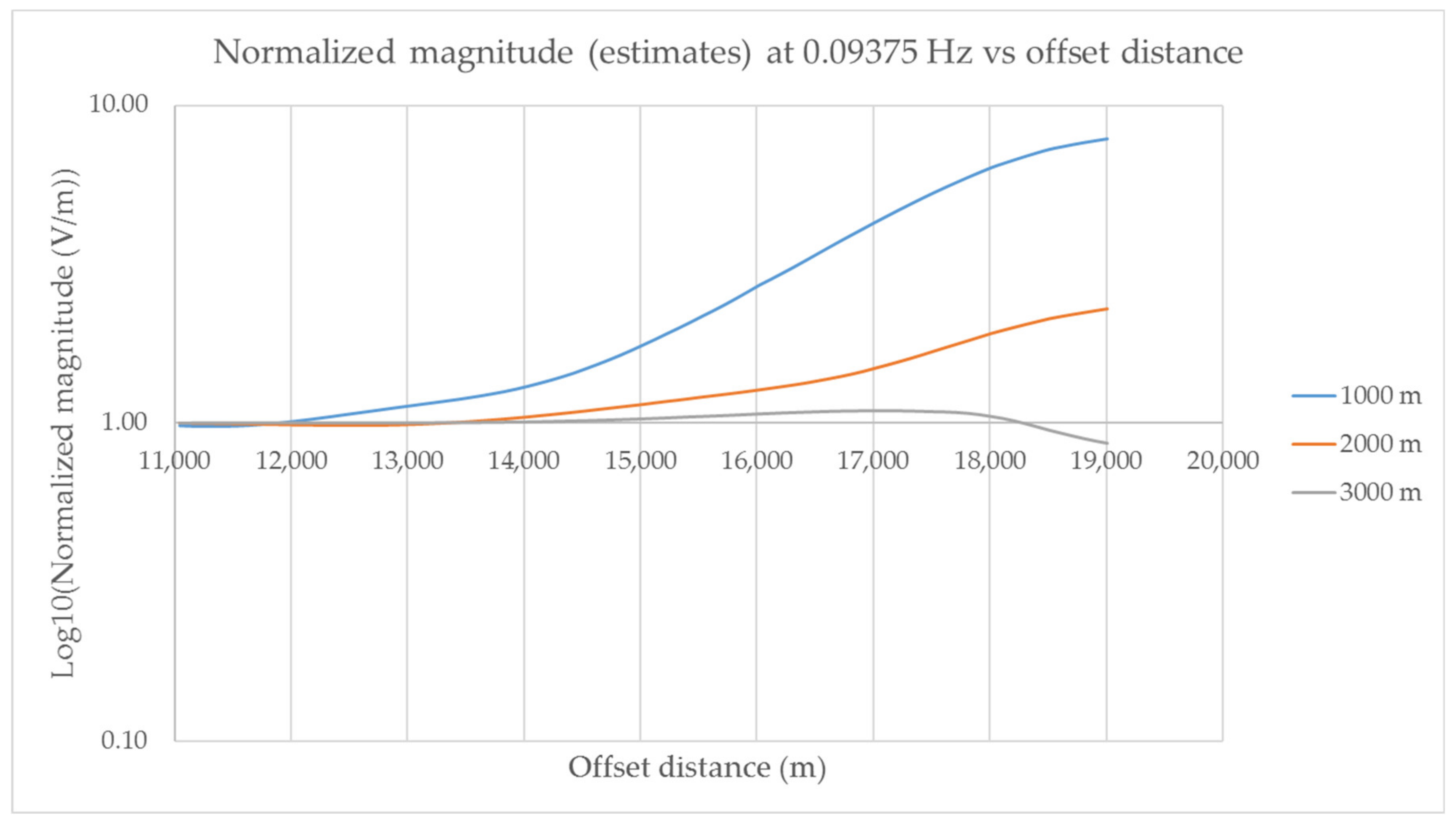
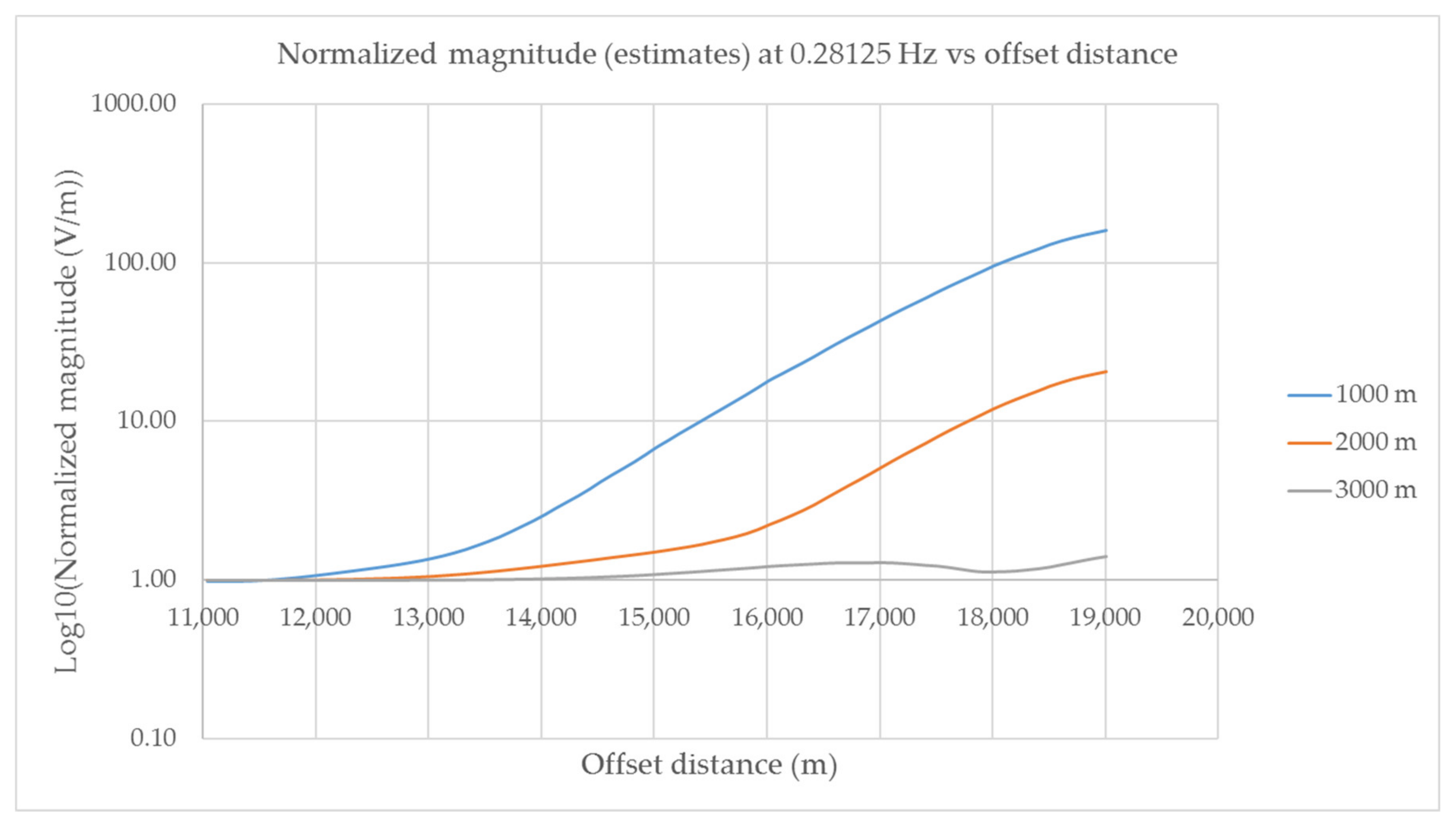
Here, we continued to study the anomaly trend of the normalized MVO for the untried transmission frequencies (0.09375 Hz, 0.28125 Hz, and 0.46875 Hz) by utilizing the developed 2D GP models. Since the estimated EM responses have been validated in the previous section, we utilized the MVO responses in the 2D GP models at all depths of hydrocarbon, which are 1000 m, 2000 m, and 3000 m. This is one of the advantages of this GP methodology where any EM response at any transmission frequency could be used and utilized beforehand for in-depth analysis to understand the responses and acquire the best model resolution for hydrocarbon detection in SBL applications. The normalized magnitudes for those three untried frequencies are depicted in
Figure 13,
Figure 14 and
Figure 15.
Based on
Figure 13,
Figure 14 and
Figure 15, the x-axis represents the offset distance, while the y-axis represents the log10 of the normalized magnitudes at three different depths of hydrocarbon for a transmission frequency of 0.0625 Hz. Here, we can see that anomalies were present in the normalized magnitudes for all three selected untried transmission frequencies as well. Note that all the SBL models were free from any obstructions and noises. Thus, the normalized magnitudes should increase gradually as the offset distance increased. However, based on
Figure 13,
Figure 14 and
Figure 15, the normalized magnitudes at a hydrocarbon depth of 3000 m for all the untried frequencies become irrelevant at far source-receiver offset distances (>~17,500 m). The magnitudes suddenly decrease after gradually increasing from the start (from the source). From these results, we can infer that when the hydrocarbon depth was at 3000 m and above beneath the seabed, hydrocarbon anomalies were difficult to interpret at far source-receiver separation distances even though multi-low-frequencies (0.0625 Hz–0.5 Hz) were employed in the SBL application.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}